Результат интеллектуальной деятельности: УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ
Вид РИД
Изобретение
Изобретение относится к устройствам систем ручного управления подвижным объектом, в том числе летательным аппаратом, и предназначено для дистанционного управления, создания и снятия усилий с ручки летчика в режиме ручного управления объектом.
Известно устройство имитации систем управления летательного аппарата [1]. Устройство включает вычислитель и несколько (по количеству рычагов управления) исполнительных блоков загрузки, каждый из которых содержит силовой электропривод, механически связанный с рычагом управления, и снабжен датчиком положения. Каждый исполнительный блок загрузки для обеспечения прямого преобразования сигнала заданного усилия в механическое усилие на рычагах управления снабжен управляемым источником тока. Недостатком является наличие нескольких рычагов управления (по количеству исполнительных механизмов), а разомкнутость системы управления приводит к накоплению ошибки регулирования.
В известном триммерном механизме (Автомат усилий и триммерная рулевая машинка. L 109 BOM SFENA. Руководство по эксплуатации. 1986 г.), в состав которого входит: загрузочная пружина для создания усилия на ручке летчика с устройством измерения деформации пружины для формирования сигнала «вмешательство летчика в управление», электродвигатель, редуктор, электромагнитная муфта сцепления, электромагнитное демпфирующее устройство. К недостаткам такого устройства относятся его сложность, а также необходимость наличия вне триммерного механизма загрузочной пружины для создания усилия на ручке управления летчика и устройства измерения деформации пружины для формирования сигнала «вмешательство летчика в управление».
В известном техническом решении [2] боковая кистевая ручка управления летательным аппаратом имеет три степени свободы с несимметричной загрузкой и регулируемым демпфированием. Она выполнена с регулировочным узлом нейтрального положения рукоятки по всем трем осям вращения. Рукоятка посредством регулируемого сборочного узла закреплена на кронштейне, закрепленном на оси одного загрузочного узла. Полученная сборка посредством другого кронштейна закреплена на оси другого загрузочного узла. Последняя сборка закреплена через кронштейн на оси третьего загрузочного узла. Все это закреплено с помощью другого кронштейна на подлокотнике. Все регулируемые и регулировочные сборочные узлы ручки выполнены в виде подпружиненных шлицевых соединений. К недостаткам можно отнести большую сложность механической части конструкции устройства управления.
Наиболее близким к заявляемому устройству, принятым за прототип, является устройство ручного управления подвижным объектом [3], которое может быть использовано в ручных электродистанционных системах управления подвижными наземными, авиационными и морскими объектами, и предназначено для формирования электрических сигналов по двум взаимно перпендикулярным направлениям движения объекта.
Устройство содержит корпус, рукоятку, кинематически связанную с механическими узлами, обеспечивающими как раздельное, так и одновременное отклонение рукоятки по двум взаимно перпендикулярным направлениям, а также пружинные загружатели и электрические датчики положения рукоятки. Механические узлы, обеспечивающие отклонение рукоятки, выполнены в виде двух дуг, консольно установленных на соответствующих осях вращения. Одна дуга отклоняется относительно вертикальной, а другая - относительно горизонтальной осей. Дуги механически связаны друг с другом посредством дугообразной стойки, нижний конец которой посредством вертикальной оси вращения подвижно соединен с дугой канала угла места и жестко соединен с кронштейном рукоятки, а верхний конец дугообразной стойки шарнирно соединен с помощью горизонтальной оси вращения с подвижной скобой, выполненной с возможностью скольжения в направляющем пазу дуги канала азимута. При этом вертикальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала азимута, а верхняя горизонтальная ось вращения дугообразной стойки совпадает с осью вращения дуги канала угла места. К кронштейну рукоятки с противоположной от вертикальной оси вращения стороны закреплен балансировочный груз.
Указанный прототип имеет следующие недостатки. В устройстве применены по каждому каналу управления механические звенья - демпфер, пружинный загружатель, коромысло, консольное крепление двух дуг, что существенно понижает прочностные и надежностные требования к конструкции ручки управления при воздействии ударных и вибрационных перегрузок в процессе эксплуатации объекта. Довольно сложно точно выдержать основное требование: тактильные характеристики ручки управления (коэффициент пропорциональности величины угла поворота ручки, необходимой величине усилия, создаваемого пружинным загружателем). При осуществлении движения рукояткой меняется момент инерции, а это влияет на точность и качество параметров регулирования траекторией движения объекта.
Техническим результатом заявляемого изобретения является упрощение конструкции устройства ручного управления подвижным объектом, снижение веса и габаритов, удобство управления. Устройство ручного управления предлагается на основе современных комплектующих, обладающих необходимой функциональностью для применения в высокоинтегрированных системах управления летательными аппаратами.
Этот технический результат достигается тем, что в устройстве ручного управления летательным аппаратом, содержащем корпус, рукоятку, кинематически связанную с двумя системами, как раздельного, так и одновременного движения рукоятки по двум взаимно перпендикулярным направлениям, включающими электрические датчики угла поворота рукоятки, в соответствии с изобретением одна из систем включает ось, жестко связанную с рукояткой, установленной в продольной прорези поводка с возможностью движения вдоль нее и поворота вала, жестко связанного с рукояткой, размещенных в рамке, выполненной за одно целое с валом, один из концов которого установлен в подшипнике, размещенном в корпусе устройства, а второй соосно установлен и жестко связан с выходным валом мехатронного электропривода, который включает высокоточный редуктор, электродвигатель и датчик угла поворота, электрически связанные с блоком управления, а другая система включает поводок, в продольной прорези которого размещена рукоятка, при этом поводок является составной частью другого вала, первый конец которого установлен на другом подшипнике, размещенном в корпусе устройства, а второй конец жестко связан с выходным валом другого мехатронного электропривода, состоящего из высокоточного редуктора, электродвигателя и датчика угла поворота, электрически связанных с блоком управления
Заявляемое устройство является новым, промышленно применимым и имеет изобретательский уровень.
Для пояснения сущности предлагаемого устройства используются следующие чертежи:
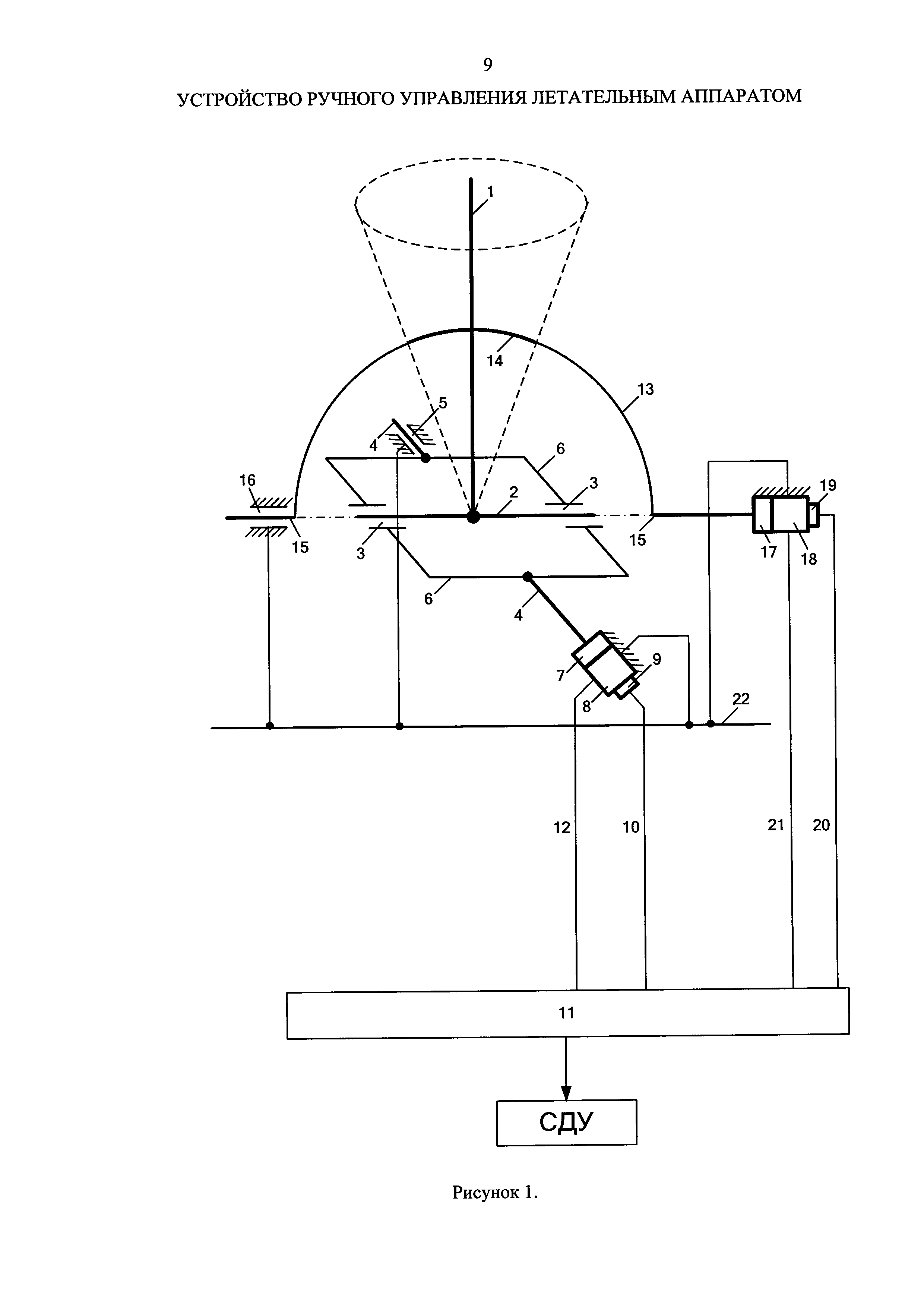
рисунок 1 - кинематическая схема устройства ручного управления подвижным объектом;
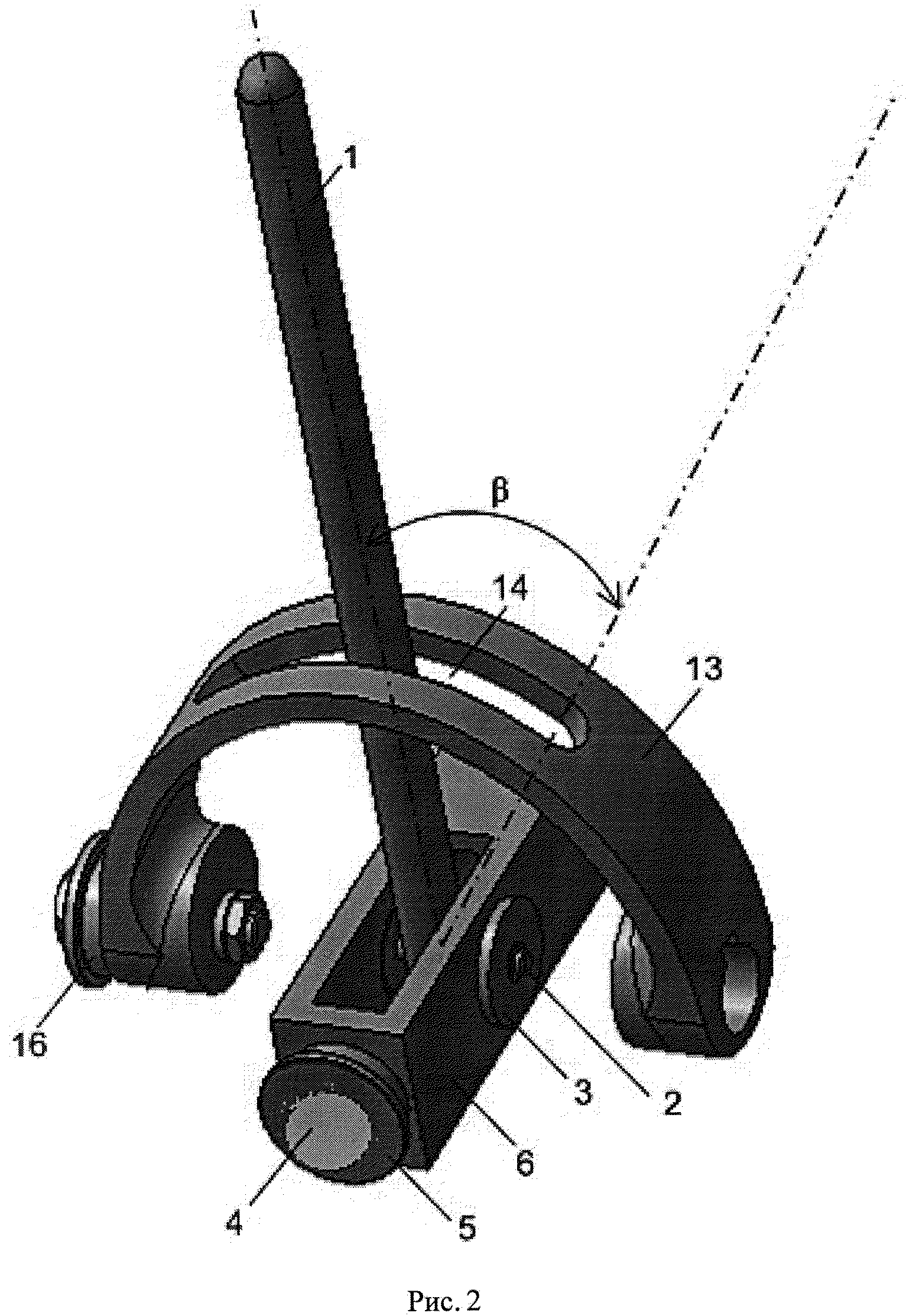
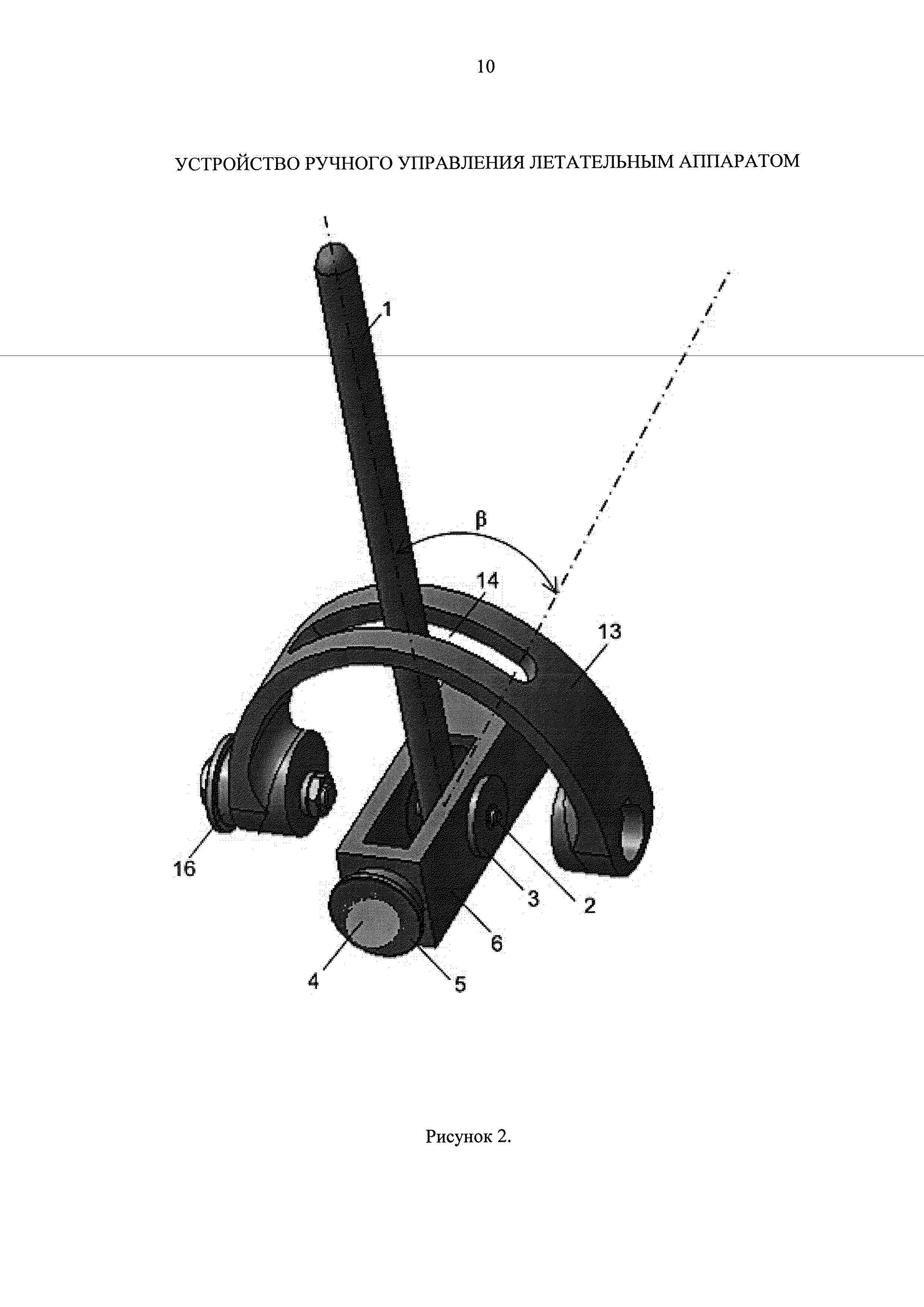
рисунок 2 - рисунок поводка вала тангажа устройства ручного управления подвижным объектом;
рисунок 3 - рисунок, поясняющий предельные отклонения рукоятки управления устройства ручного управления подвижным объектом.
Кинематическая схема устройства ручного управления подвижным объектом (рис. 1) содержит рукоятку управления 1, предназначенную для осуществления движений крена и тангажа летательного аппарата. Рукоятка жестко связана с осью 2, установленной в подшипниках 3, размещенных в рамке 6, выполненной за одно целое с валом 4, и размещена в его средней части. Один из концов вала установлен в подшипнике 5, размещенном в корпусе 22. Второй конец вала 4 соосно установлен и жестко связан с выходным валом мехатронного электропривода, который включает высокоточный редуктор 7, электродвигатель 8 и датчик угла поворота 9. Датчик угла поворота 9 электрически связан проводами 10 с блоком управления 11, а электрическое питание электродвигателя 8 осуществляется блоком управления 11, подсоединенным к электродвигателю 8 проводами 12. Редуктор 7, электродвигатель 8, датчик угла поворота 9 и блок управления 11 с электрическими связями образуют следящую систему по крену. Благодаря вышеописанным связям рукоятка 1 может поворачиваться для осуществления крена на максимальный угол 2β.
Рукоятка управления 1 размешена в продольной прорези 14 поводка 13 (рис. 2). Длина прорези ограничена максимальной величиной угла крена 2β. Рукоятка размещена с возможностью движения вдоль прорези и поворота при этом вала 4. Поводок 13 является составной частью вала 15, первый конец которого установлен на подшипнике 16 в корпусе 22, а второй конец вала 15 жестко связан с выходным валом мехатронного электропривода, состоящими из высокоточного редуктора 17, электродвигателя 18 и датчика угла поворота 19, который электрически связан проводами 20 с блоком управления 11. Электрическое питание электродвигателя 18 осуществляется блоком управления 11, к которому электродвигатель подсоединен проводами 21. Редуктор 17, электродвигатель 18, датчик угла поворота 19 и блок управления 11 с электрическими связями образуют следящую систему по тангажу. Корпуса мехатронных электроприводов установлены в корпусе 22.
Работа заявляемого устройства осуществляется следующим образом.
Рукоятка может занимать любое положение внутри объема условного конуса, изображенного на рис. 3. Вершина конуса расположена в точке О, а радиусы условного основания, которое может быть как эллипсом, так и окружностью, в зависимости от предельных углов поворота ручки 2α и 2β равны Rк=OA⋅sinβ и Rт=OA⋅sinα.
При перемещении рукоятки 1 только по крену она скользит по пазу 14, не передавая усилия на поводок 13. При этом усилие передается на ось 2, поворачивая вал 4, который передает движение на вал редуктора 7, электродвигатель 8 и датчик угла поворота 9. Одновременно передается сигнал с датчика углового положения 9 по проводам 10 в блок регулирования 11. Через электрические провода 12 подключается электродвигатель 8. Создается усилие противодействия руке пилота на рукоятке управления 1, причем контроль за величиной нагрузки осуществляется блоком 11 и обратной связью следящей системы в зависимости от угла поворота через датчик 9 с проводами 10. Настройка величины усилия и других параметров осуществляется в соответствии с программой блока управления 11 в зависимости от заданных характеристик: демпфирования, статического и динамического трения, коэффициента пропорциональности между усилием на рукоятке 1 и величиной угла поворота вала 4.
При повороте рукоятки 1 управления по тангажу ось 2 поворачивается в подшипниках 3 и одновременно рукоятка 1 управления поворачивает поводок 13 и связанный с ним вал 15, вращательное движение передается валу редуктора 17, валу двигателя 18 и датчику угла поворота 19. Одновременно передается сигнал с датчика углового положения 19 по проводам 20 в блок регулирования 11 и согласно заданной программе запускается электродвигатель 18 по проводу 21, причем создаваемое усилие электродвигателем 18 на рукоятке управления 1 зависит от перечисленных выше параметров настройки блока регулирования 11. Если осуществляется движение рукоятки управления 1 по крену и тангажу одновременно, то работают обе электромеханические следящие системы согласно описанному выше. Обработанный блоком регулирования 11 сигнал поступает в систему дистанционного управления (СДУ) летательного аппарата.
Таким образом, обеспечивается воспроизведение реального физического процесса движения рычага управления, где на рычаг управления воздействует с одной стороны механическая проводка с присоединенными к ней элементами и устройствами системы управления, а с другой стороны - летчик. Только вместо реальной проводки системы управления в заявляемом устройстве ручного управления подключается силовой электропривод, генерирующий усилия ее воздействия. В силу этого, исключается влияние на процесс управления динамических свойств рычага управления: инерционности, упругости и трения. Электроприводы систем заявляемого устройства установлены стационарно, не зависят друг от друга. Нижняя часть рукоятки фиксируется в одном положении на оси и при работе поворачивается относительно центра фиксации, не изменяя суммарного момента инерции, нет всевозможных балансировочных грузов. Применение заявляемого устройства, когда связь между органами управления и исполнительными устройствами, воздействующими на активные поверхности самолета, осуществляется с помощью формирования и передачи электрических сигналов, полностью соответствует современной концепции электрифицированного самолета. Применение устройства управления, снабженного регулируемым электроприводом и микропроцессорной системой управления, обеспечивает его легкую настройку на конкретное применение и контроль всех необходимых параметров. Частично решается актуальная задача увеличения точности измерения усилий и отработки воздействий пилота на рукоятку устройства.
Таким образом, заявляемое устройство устойчиво в работе, повышает качество воспроизведения усилий на рычагах управления в широком диапазоне изменения градиентов загрузки.
Источники информации
1. Патент RU №2298836, МПК G09B 9/28.
2. Патент RU №2164878, МПК B64C 13/06, G0SG 9/02.
3. Патент RU №2253593, МПК B64C 13/04.
Устройство ручного управления летательным аппаратом, содержащее корпус, рукоятку, кинематически связанную с двумя системами, как раздельного, так и одновременного движения рукоятки по двум взаимно перпендикулярным направлениям, включающими электрические датчики угла поворота рукоятки, отличающееся тем, что одна из систем включает ось, жестко связанную с рукояткой, установленной в продольной прорези поводка с возможностью движения вдоль нее и поворота вала, жестко связанного с рукояткой, размещенных в рамке, выполненной за одно целое с валом, один из концов которого установлен в подшипнике, размещенном в корпусе устройства, а второй соосно установлен и жестко связан с выходным валом мехатронного электропривода, который включает высокоточный редуктор, электродвигатель и датчик угла поворота, электрически связанные с блоком управления, а другая система включает поводок, в продольной прорези которого размещена рукоятка, при этом поводок является составной частью другого вала, первый конец которого установлен на другом подшипнике, размещенном в корпусе устройства, а второй конец жестко связан с выходным валом другого мехатронного электропривода, состоящего из высокоточного редуктора, электродвигателя и датчика угла поворота, электрически связанных с блоком управления.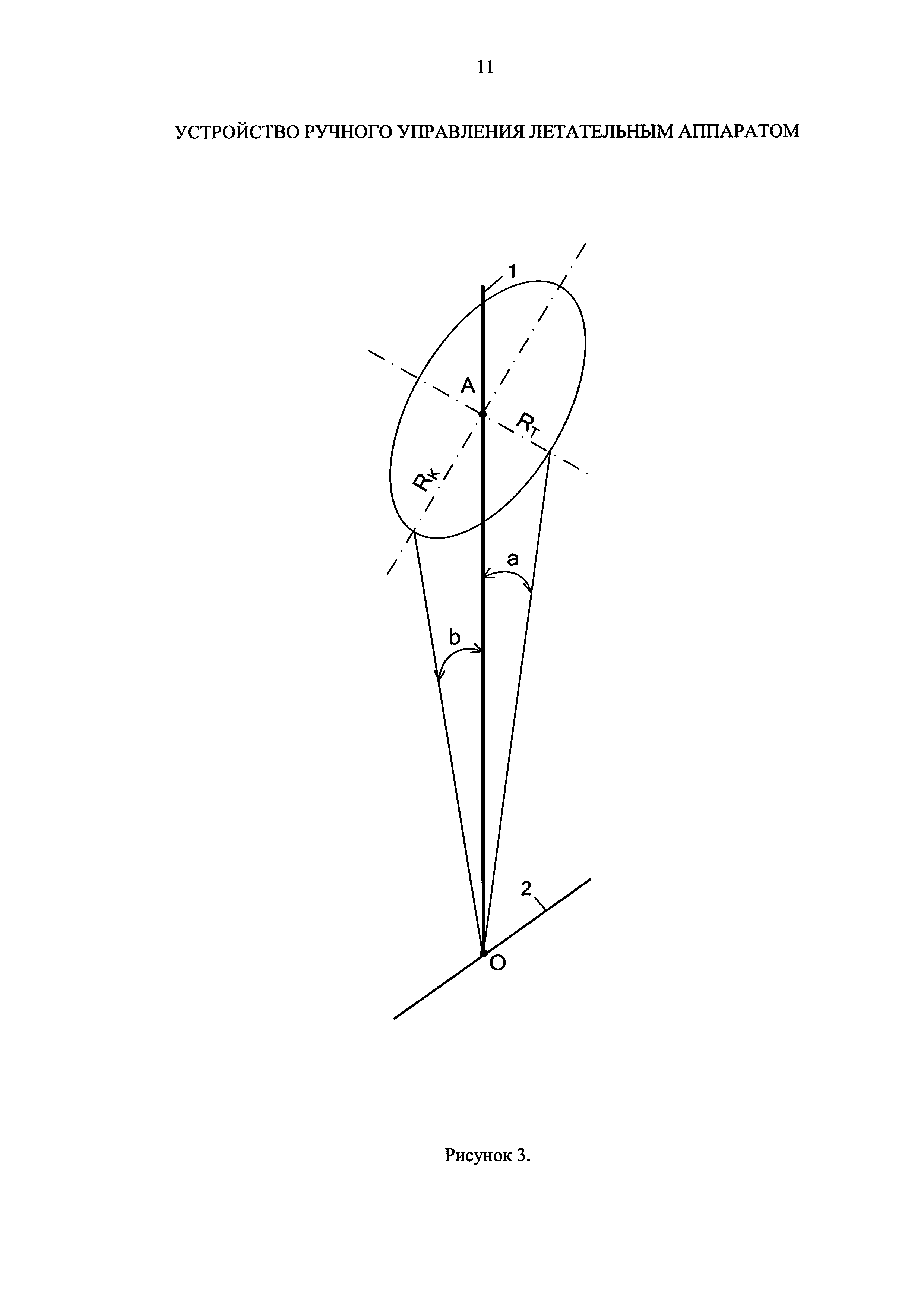
Связка на основе меди для изготовления алмазного инструмента
Смесь для изготовления литейных форм и стержней
Лаковая композиция на основе олигоуретанакрилата
Гидротурбина
Способ определения примерного роста человека по единичному следу его стопы
Датчик влажности
Способ лечения эриматозной формы рожистого воспаления
Стимулятор для предпосевной обработки семян
Гербицидная композиция
Способ получения 2-ацил(ароил)-7-имино-6-оксабицикло[3.2.1]октан-1,8,8-трикарбонитрилов
Способ определения риска рака предстательной железы
Способ определения степени агрессивности течения рака легкого.

