Результат интеллектуальной деятельности: АКТИВНОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА И СОДЕРЖАЩАЯ ЕГО ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА
Вид РИД
Изобретение
Данное изобретение относится к активному позиционирующему устройству хирургического инструмента и к хирургической роботизированной системе или же телеманипулятору для минимально-инвазивной хирургии и, прежде всего, лапароскопии.
Роботизированные системы или также телеманипуляторы для минимально-инвазивной хирургии, прежде всего для лапароскопической хирургии, заменяют посредством моторизованного позиционирования, как правило, приводимые в действие вручную хирургами операционные инструменты, такие как, например, хирургические инструменты, эндоскоп или же камера. Применяемые операционные инструменты вводят через один или же несколько троакаров во внутренние части пациента. Троакаром называют инструмент, с помощью которого хирург при минимально-инвазивной хирургии создает доступ к полости тела пациента (как правило, брюшной полости или грудной полости), причем доступ поддерживается открытым через трубу, так называемый тубус. Предусмотренная в роботизированной системе механика перемещения и управляющая логика делают возможным перемещение операционных инструментов вокруг точки вращения с двумя степенями свободы (x, y), а также линейное перемещение операционных инструментов вдоль оси (z) инструментов. Точкой вращения называют неизменную точку перемещения с двумя степенями свободы (x, y) . Эта точка вращения наиболее предпочтительно располагается в точке пересечения троакара с брюшной стенкой пациента. Управляющая логика роботизированной системы должна знать точку вращения или же точка вращения должна быть задана посредством конструктивного выполнения механики перемещения для ограничения перемещения операционного инструмента таким образом, что биомеханическая нагрузка на ткань в окрестности троакара является, по возможности, малой.
Известные из уровня техники роботизированные системы основаны на механических руках для пассивного предварительного позиционирования и для активного перемещения операционного инструмента. Решения с механическими руками из уровня техники, которые реализуют пассивное предварительное позиционирование и активное перемещение операционных инструментов вокруг точки вращения, нуждаются, с одной стороны, в большом монтажном пространстве и, с другой стороны, процессы движения механических рук могут привести к столкновению.
Во время минимально-инвазивного хирургического вмешательства применяют по меньшей мере два, как правило от трех до четырех, хирургических инструментов, таких как захват, ножницы, иглодержатель, рассекатель), а также камеру или же эндоскоп, которые вводят в каждом случае через отдельный троакар во внутренние части тела пациента. Это означает, что для каждого примененного операционного инструмента имеется в наличии механическая рука, которая управляет пассивным предварительным позиционированием и активным перемещением инструмента.
Недостаток решений из уровня техники состоит в том, что положение пациента должно быть зафиксировано до начала операции, и перекладывание пациента во время операции является почти невозможным.
Другим, уже упомянутым, недостатком является большое монтажное пространство, которого требуют известные роботизированные системы.
Поэтому, целью данного изобретения является предоставление активного позиционирующего устройства хирургического инструмента и хирургической роботизированной системы, которое или же которые предусматривают высокую гибкость, и нуждаются только в незначительном монтажном пространстве или же являются более компактными и легкими по конструкции.
Другой целью данного изобретения является предоставление роботизированной системы, которая делает возможным перекладывание пациента во время операции, прежде всего без необходимости в ограничении при этом свободы передвижений хирургического инструмента после перекладывания.
Эти цели достигнуты в активном позиционирующем устройстве хирургического инструмента, охарактеризованном в пункте 1 формулы изобретения, и хирургической роботизированной системе, охарактеризованной в пункте 9 формулы.
Одним объектом изобретения является активное позиционирующее устройство хирургического инструмента для применения на механической руке, содержащее:
- несущую панель, которая выполнена с возможностью соединения с механической рукой,
- портирующее устройство, которое расположено на несущей плите и предусмотрено для прохождения к внутренней части тела,
- по меньшей мере одно направляющее устройство, выполненное для введения хирургического инструмента в тело, причем хвостовик хирургического инструмента простирается насквозь через направляющее устройство, и причем направляющее устройство варьируемо соединено с портирующим устройством посредством компенсирующего элемента, и
- регулировочное устройство для направляющего устройства по отношению к портирующему устройству, которое расположено, с одной стороны, на несущей панели и/или портирующем устройстве и, с другой стороны, на направляющем устройстве таким образом, что хвостовик хирургического инструмента является подвижным как в x-направлении, так и в y-направлении по отношению к исходному положению, в котором продольная протяженность хирургического инструмента проходит параллельно продольной протяженности портирующего устройства.
В предпочтительном варианте осуществления компенсирующий элемент выполнен с возможностью изменения в своей геометрии таким образом, что свободно выбираемый угол между портирующим устройством и направляющим устройством является устанавливаемым как в x-, так и в y-направлении по отношению к совпадающим друг с другом исходным положениям, причем компенсирующий элемент выполнен, прежде всего, из упругого материала.
В другом предпочтительном варианте осуществления регулировочное устройство имеет по меньшей мере два выполненных с возможностью управления приводных устройства, которые выполнены, прежде всего, в виде расположенных ортогонально друг другу исполнительных приводов, причем между направляющим устройством и несущей панелью или портирующим устройством предусмотрен механизм рычага на шаровой опоре таким образом, что посредством исполнительных приводов с помощью механизма рычага на шаровой опоре направляющее устройство является позиционируемым по отношению к исходному положению независимо в x-направлении и в y-направлении.
В другом предпочтительном варианте осуществления на направляющем устройстве предусмотрено устройство продольного перемещения, которое соединено с хирургическим инструментом таким образом, что хвостовик хирургического инструмента является подвижным в z-направлении. Предпочтительно, устройство продольного перемещения посредством телескопической системы 20 и/или системы гибких тяг способно к перемещению хвостовика хирургического инструмента в z-направлении.
В другом предпочтительном варианте осуществления на хирургическом инструменте предусмотрен приводной узел инструмента, который содержит вращательный привод, посредством которого хвостовик хирургического инструмента поворотно варьируется по отношению к исходному положению вокруг z-направления. Предпочтительно, приводной узел инструмента имеет три приводных устройства инструмента, посредством которых закрепленный на дистальном конце рабочий узел хирургического инструмента является варьируемым с тремя другими степенями свободы. Прежде всего, предпочтительно, приводной узел инструмента размещен на проксимальном конце телескопической системы посредством удерживающего устройства.
Кроме того, может быть предусмотрено два направляющих устройства для введения двух хирургических инструментов через компенсирующий элемент, причем регулировочное устройство первого направляющего устройства расположено по существу зеркально обращенным по отношению к продольной оси обоих направляющих устройств к регулировочному устройству другого направляющего устройства.
Другим объектом изобретения является хирургическая роботизированная система для осуществления оперативных вмешательств на человеческом теле, содержащая:
- управляющее устройство, которое выполнено с возможностью обслуживания пользователем для осуществления оперативного вмешательства,
- несущую конструкцию, на которой расположены две или несколько механических рук, которые выполнены с возможностью перемещения посредством управляющего устройства,
и причем по меньшей мере на одной механической руке предусмотрено активное позиционирующее устройство хирургического инструмента, которое содержит несущую панель, которая выполнена с возможностью соединения с механической рукой,
- портирующее устройство, которое расположено на несущей панели и предусмотрено для прохождения к внутренней части тела,
- по меньшей мере одно направляющее устройство для введения хирургического инструмента в тело, причем хвостовик хирургического инструмента простирается насквозь через направляющее устройство, и причем направляющее устройство варьируемо соединено с портирующим устройством посредством компенсирующего элемента, и
- регулировочное устройство для направляющего устройства по отношению к портирующему устройству, которое расположено, с одной стороны, на несущей панели и/или портирующем устройстве и, с другой стороны, на направляющем устройстве таким образом, что хвостовик хирургического инструмента является подвижным как в x-направлении, так и в y-направлении по отношению к исходному положению, в котором продольная протяженность хирургического инструмента проходит параллельно продольной протяженности портирующего устройства.
В предпочтительном варианте осуществления компенсирующий элемент выполнен с возможностью изменения в своей геометрии таким образом, что свободно выбираемый угол между портирующим устройством и направляющим устройством является устанавливаемым как в x-, так и в y-направлении по отношению к совпадающим друг с другом исходным положениям, причем компенсирующий элемент выполнен, прежде всего, из упругого материала.
Другие предпочтительные варианты осуществления хирургической роботизированной системы согласно изобретению получаются из дополнительных пунктов формулы изобретения, аналогично активному позиционирующему устройству для хирургического инструмента. Это реализовано, прежде всего, вследствие того, что активное позиционирующее устройство согласно изобретению может быть скомбинировано с роботизированной системой или же может дополнять ее.
Понятия «Роботизированная система» и «Телеманипулятор» согласно изобретению могут применяться синонимически.
Данное изобретение показано, сугубо в качестве примера, посредством приложенных чертежей. Показано на:
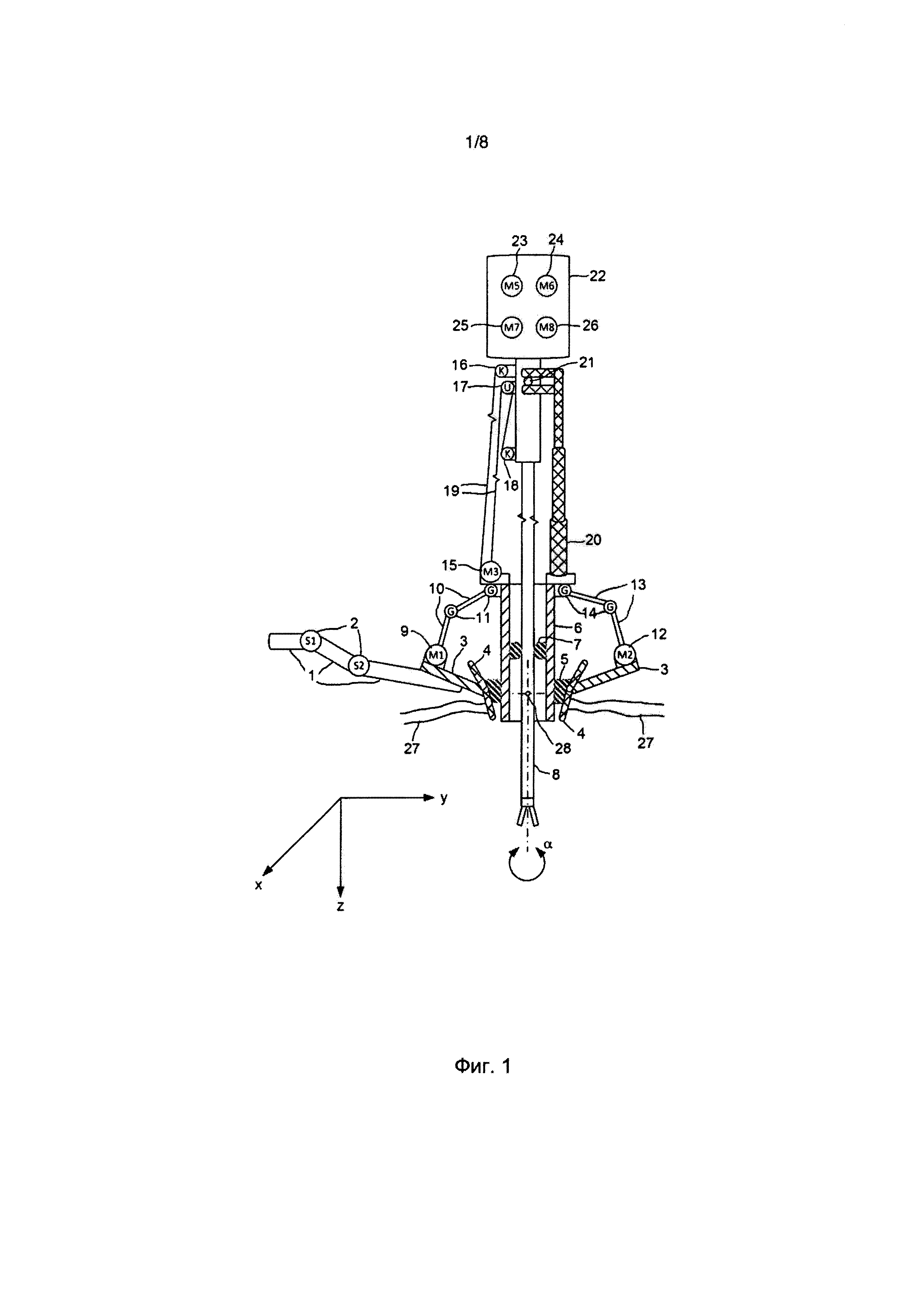
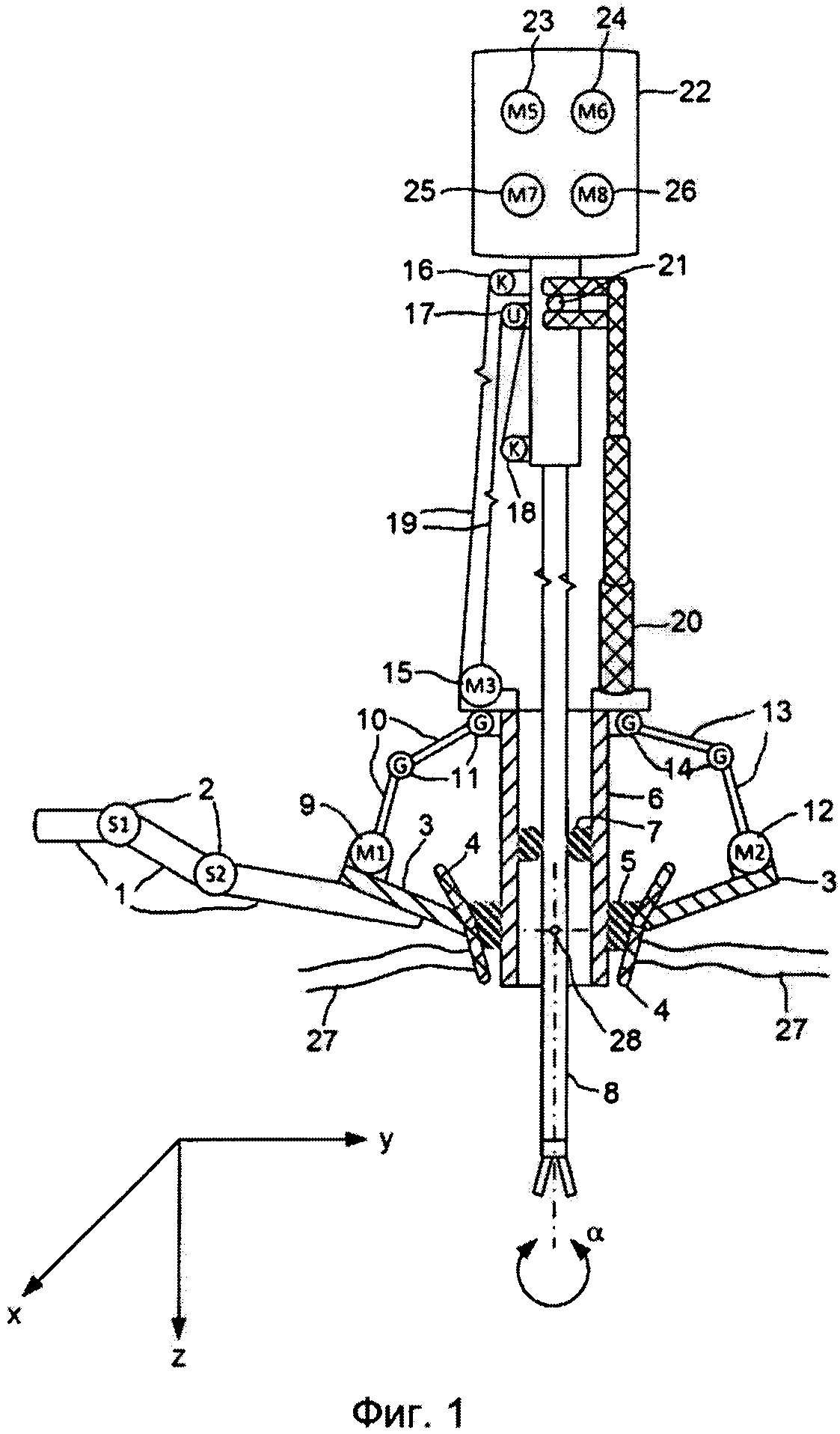
Фиг. 1 - схематическое представление активного позиционирующего устройства согласно изобретению хирургического инструмента, которое размещено на механической руке,
Фиг. 2 - схематический фрагмент активного позиционирующего устройства согласно изобретению с возможностью присоединения для введения инсуфляционного газа, как правило СО2,
Фиг. 3 - горизонтальная проекция активного позиционирующего устройства согласно фиг. 1,
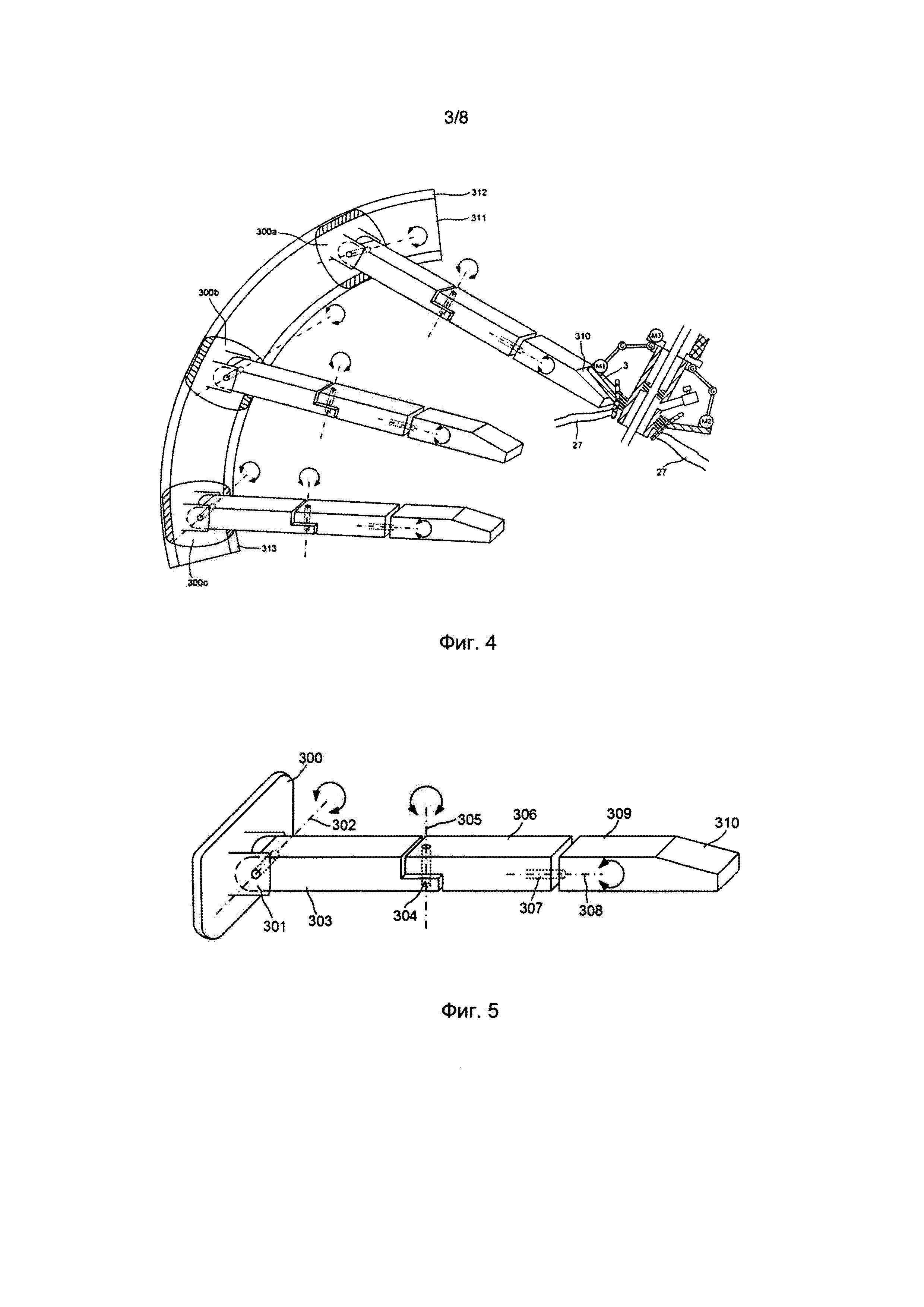
Фиг. 4 - схематическое представление части хирургической роботизированной системы согласно изобретению во время операции на человеческом теле,
Фиг. 5 - схематическое представление механической руки согласно изобретению,
Фиг. 6 - схематическое представление хирургического инструмента, который может быть составной частью изобретения,
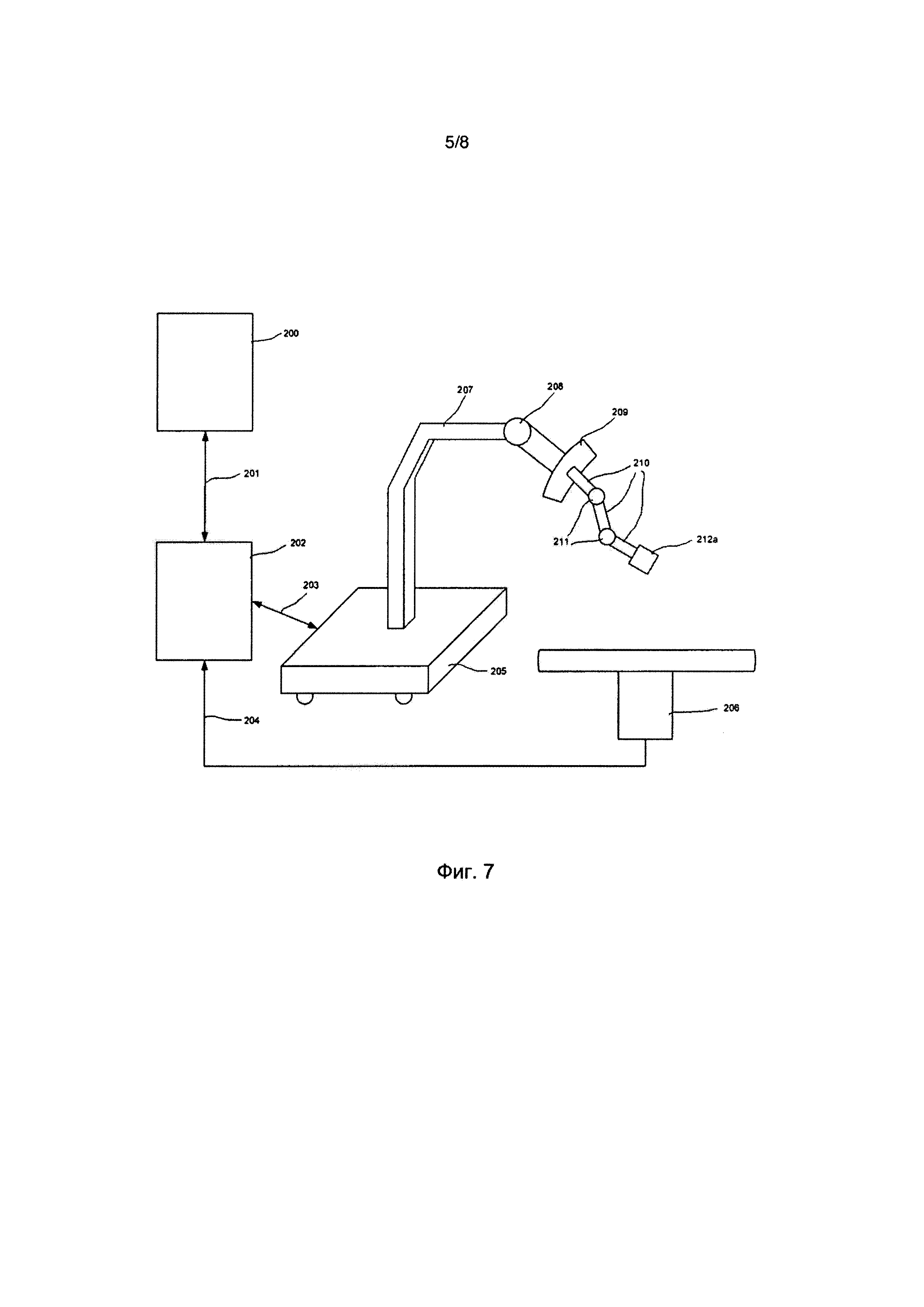
Фиг. 7 - схематическое представление роботизированной системы с механической рукой и активными позиционирующими устройствами согласно изобретению, и
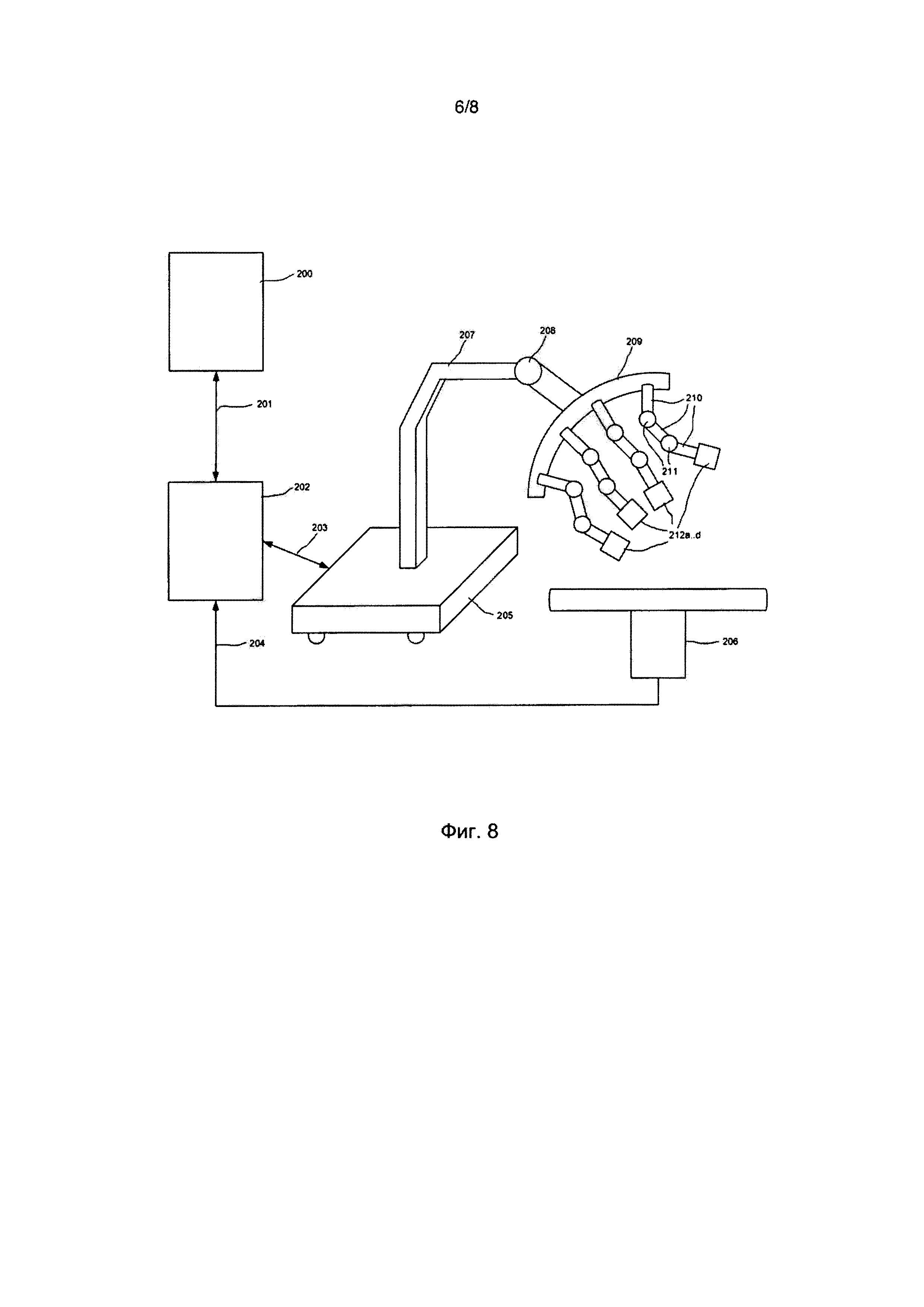
Фиг. 8 - схематическое представление роботизированной системы с четырьмя механическими руками и активными позиционирующими устройствами согласно изобретению,
Фиг. 9 - схематическое представление активного позиционирующего устройства согласно изобретению для двух хирургических инструментов и общего порта, которое размещено на механической руке,
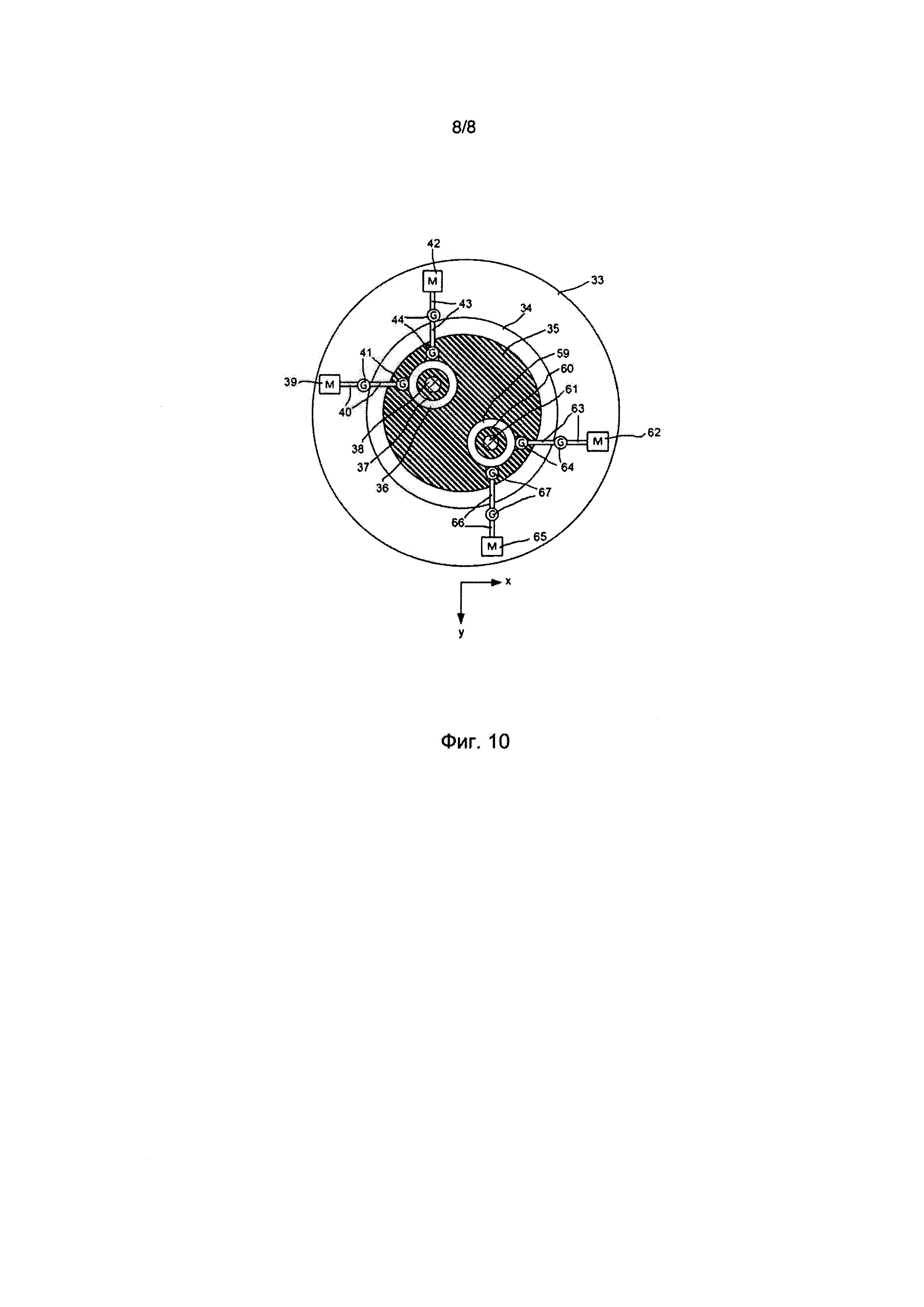
Фиг. 10 - горизонтальная проекция активного позиционирующего устройства согласно фиг. 9.
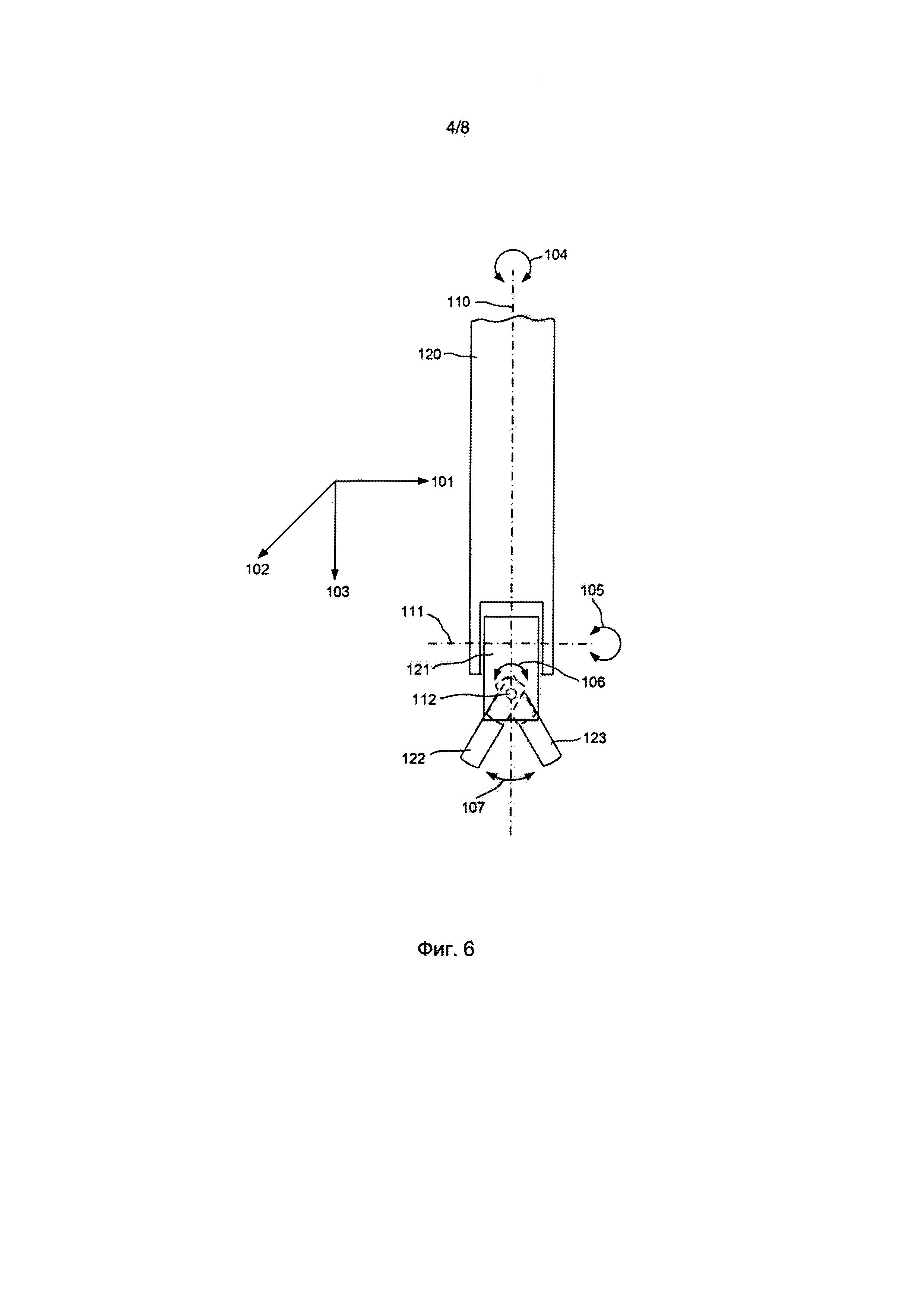
Данное изобретение согласно одному аспекту относится к хирургической роботизированной системе или же телеманипулятору, в рамках которого пассивное предварительное позиционирование троакара или же активного позиционирующего устройства комбинируют с активной системой управления или же с моторизацией троакара для перемещения операционного инструмента. Такой «активный троакар» согласно изобретению может перемещать операционный инструмент вокруг точки вращения по меньшей мере с двумя степенями свободы (направление 101 и 102), как представлено на фиг.6. Операционные инструменты согласно изобретению имеют, в целом, семь степеней свободы: три степени свободы (степени свободы 101, 102, и 103 согласно фиг.6) реализуют посредством приводного сочленения между вставленным в троакар операционным инструментом и соответствующими узлами привода, другие четыре степени свободы (степени свободы 104, 105, 106 и 107 согласно фиг. 6) реализуют посредством приводного узла на конце каждого вставленного операционного инструмента.
Поскольку точка вращения задается посредством активного троакара как такового, положение точки вращения задают до начала операции посредством предварительного позиционирования активного троакара. Перекладывание пациента после начала хирургического вмешательства тем самым является возможным, поскольку точка вращения конструктивно соединена с позиционирующими устройствами или же с активными троакарами согласно изобретению, и при перекладывании удерживает свое положение по отношению к активному позиционирующему устройству, то есть точка вращения всегда удерживает свое положение по отношению к инструменту и несущей панели, а также направляющему устройству.
Кроме того, за счет отказа от механических рук для активного позиционирования инструментов система может быть выполнена значительно более компактной и легкой. За счет этого сделана возможной более простая транспортировка совокупной системы, например, в другую операционную и, тем самым, более высокие универсальность и коэффициент полезного использования.
Данное изобретение описывается в последующем подробно со ссылками на чертежи.
Фиг. 1 показывает активное позиционирующее устройство согласно изобретению хирургического инструмента, которое размещено на механической руке. Во время минимально-инвазивного, лапароскопического вмешательства вступают в действие, как правило, четыре операционных инструмента, из них три хирургических инструмента и одна камера или же эндоскоп, которыми управляет оператор посредством телеманипуляторной системы. Следовательно, соответственно изобретению в системе имеются в наличии, предпочтительно, четыре варианта осуществления активного троакара или же активного позиционирующего устройства. Тем не менее, подразумевается, что также и варианты осуществления с 1-3 или более чем 4 активными троакарам попадают в пределы правовой охраны изобретения. Каждый активный троакар укреплен независимо от силы тяжести посредством могущей быть снабженной шарнирами механической руки 1.
Следовательно, такой механизм крепления должен быть предусмотрен для каждого активного троакара. Все механизмы крепления могут быть укреплены на общем основании (смотри фиг. 4), или на раздельных основаниях. Крепление на раздельных основаниях может иметь смысл, когда этого требует расположение троакаров для хирургического вмешательства.
С механической рукой 1 жестко соединена несущая панель 3 активного троакара. Эта несущая панель 3, в свою очередь, жестко соединена с портирующим устройством 4. Портирующее устройство 4, со своей стороны, соединено посредством компенсирующего элемента 5 с направляющим устройством 6. За счет компенсирующего элемента 5 обеспечена возможность перемещения (наклона) направляющего устройства 6 по отношению к портирующему устройству 4. Посредством этого перемещения реализуется поворотное перемещение хирургического инструмента 8. Направляющее устройство 6 принимает хирургический инструмент 8. Посредством прокладочного кольца 7 производится газонепроницаемое уплотнение хирургического инструмента 8 по отношению к направляющему устройству 6.
При лапароскопии брюшная полость «накачивается» за счет введения газа (двуокиси углерода, CO2) для обеспечения оператору большей свободы передвижений для проведения настоящего хирургического вмешательства. Для предотвращения удаления газа требуется уплотнение 7.
Приводные устройства или же исполнительные приводы 9, 12 расположены ортогонально друг другу. Посредством механизма 10, 11, а также 13, 14 рычага на шаровой опоре усилия к верхнему концу направляющего устройства 6 прикладывают таким образом, что оно взаимно независимо перемещается относительно портирующего устройства 4 по двум осям (x, y).
Другой исполнительный привод 15 размещен на верхнем конце направляющего устройства 6. Посредством механической части исполнительного привода, состоящей из зажима 16, отклоняющего ролика 17, зажима 18 и соответствующих гибких тяг 19, реализуется линейное перемещение инструмента в z-направлении.
Телескопическая система 20 посредством удерживающего устройства 21 соединена с приводным узлом 22 инструмента таким образом, что предотвращается вращательное перемещение а хирургического инструмента 8 вокруг оси z. Вращательное перемещение а хирургического инструмента 8 реализуется посредством вращательного привода 23, который соединен со хвостовиком хирургического инструмента 8. Приводные устройства 24, 25 и 26 инструментов реализуют перемещения хирургического инструмента 8 со степенями 105, 106 и 107 свободы, смотри фиг. 6.
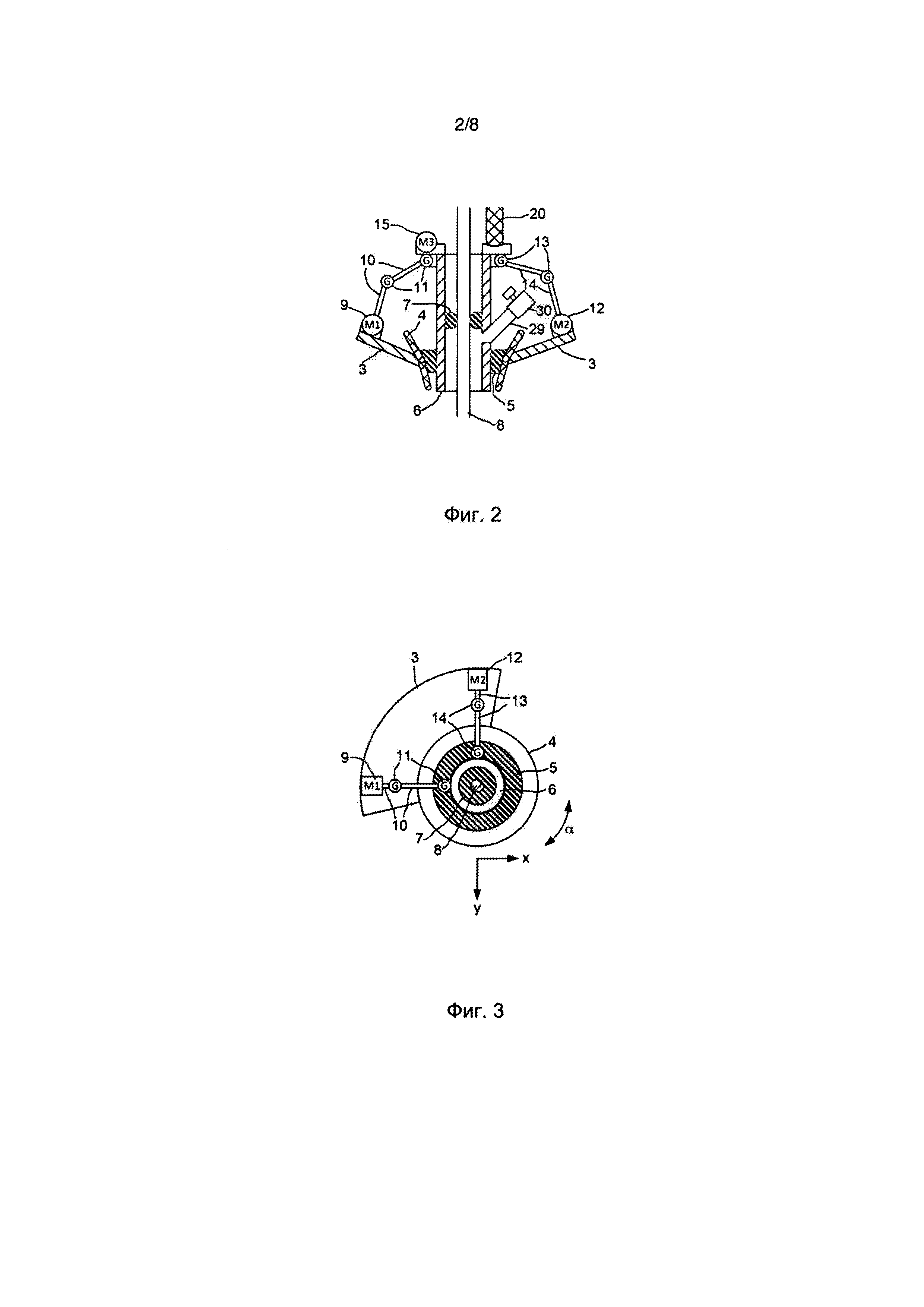
Фиг. 2 показывает активное позиционирующее устройство согласно изобретению согласно фиг. 1, дополнительно снабженное инсуфляционным присоединением, состоящим из подающей трубы 29, которая впадает ниже уплотнения 7 в полость троакара 6, а также из присоединительно-клапанного блока 30. Инсуфляционное устройство целесообразным образом соединено с присоединительно-клапанным блоком. Это устройство закачивает в брюшную полость пациента газ, как правило CO2, через клапанный блок 30 и через присоединенную к нему подающую трубу 29. Нежелательное удаление газа из брюшной полости пациента в окружающую среду предотвращает уплотнение 7. Уплотнение 7 целесообразно выполнено таким образом, что при полном удалении инструмента 8 из троакара 6 оно газонепроницаемо закрывает его, то есть также и при изъятом инструменте какой-либо инсуфляционный газ не удаляется в окружающую среду.
Фиг. 3 показывает горизонтальную проекцию активного позиционирующего устройства согласно фиг. 1,
Фиг. 4 показывает схематическое представление части хирургической роботизированной системы согласно изобретению во время операции на человеческом теле, детально описанные на фиг. 5 механические руки посредством базовых креплений, здесь как образец, 300а, 300b и 300c, удержаны таким образом, что эти базовые крепления могут быть удержаны, например, на дугообразно изогнутой направляющей 311 в сочетании с 312 и 313, и быть позиционированы независимо относительно друг друга. На соединительной поверхности 310 механической руки удержано на блоке активное позиционирующее устройство согласно фиг. 1 или же 2. Предпочтительно дугообразная форма направляющей имеет преимущество в предварительном позиционировании механических рук согласно типичной анатомии пациента на дуговом участке поверх брюшной стенки 27.
Фиг. 5 показывает схематическое представление механической руки согласно изобретению, механическая рука состоит из нескольких компонентов 303, 306 и 309, которые соединены друг с другом посредством шарниров таким образом, что является возможным расположение соединительной поверхности 310 по отношению к активному позиционирующему устройству согласно фиг. 1 или же 2. Сама механическая рука укреплена на базовом креплении 300 посредством шарнира 301, который делает возможным поворотное перемещение вокруг оси вращения 302 на +/-90°. Первое составляющее звено 303 механической руки направлено к другому шарниру 304, который имеет ось 305 вращения, предпочтительно, ортогональную оси 302 вращения. Посредством шарнира 304 присоединено другое составляющее звено 306 механической руки, которое делает возможным посредством другого шарнира 307 поворотное перемещение 308, предпочтительно ориентированное ортогонально оси вращения 302 и ортогонально оси вращения 305. Третье составляющее звено 309 механической руки имеет на его дистальном конце соединительную поверхность 310, на которой посредством полученного подходящим способом соединения с силовым, а предпочтительно, также с геометрическим замыканием может быть укреплено на блоке 3 активное устройство позиционирования согласно фиг. 1 или же 2. Шарниры 301, 304, 307 могут быть выполнены как активными, то есть снабженными исполнительными приводами, так и пассивными. Шарниры 301, 304, 307 снабжены абсолютными датчиками положения таким образом, что известно положение или же ориентация в пространстве механических рук и в каждом случае присоединенного к ним активного позиционирующего устройства. Сигналы абсолютных датчиков положения могут быть рассчитаны, предпочтительно, в блоке 202 управления во взаимосвязи друг с другом таким образом, что при знании геометрии и актуального установочного положения активного позиционирующего устройства согласно фиг. 1 или же 2 угрожающее столкновение различных механических рук или, соответственно столкновение механической руки с активным позиционирующим устройством другой механической руки распознается, и для пользователя может быть выпущено предупреждение о столкновении посредством блока 200 управления и индикации. В другом варианте осуществления блок 202 управления может активно избегать потенциального взаимного столкновения различных механических рук, или же столкновения механической руки с активным позиционирующим устройством другой механической руки посредством изменения посредством блока 200 управления и индикации заданной исполнительной команды. В пассивном варианте осуществления шарниры 301, 304, 307 предпочтительно предохранены с помощью приспособления от непредусмотренной перестановки положения шарнира.
Фиг. 6 показывает хирургический инструмент в качестве возможной составной части изобретения. В целом устройство имеет семь степеней свободы. Они реализуются через линейное перемещение хвостовика 120 инструмента в x-направлении 101 и в y-направлении 102. Эти перемещения осуществляют перекос инструмента вокруг точки вращения. Кроме того, хвостовик 120 инструмента может перемещаться в z-направлении 103. Хвостовик 120 инструмента может вращательно перемещаться вокруг его собственной оси 110 инструмента в направлении 104 перемещения. Наконечник инструмента состоит по меньшей мере из трех подвижных относительно друг друга узлов. При этом первый 121 узел расположен на оси 111 вращения с возможностью поворота в направлении 105 вращения относительно хвостовика 120 инструмента. Этот узел 121, в свою очередь, несет два узла 122, 123, которые расположены независимо друг от друга на оси 112 вращения с возможностью поворота в направлении 106 вращения. За счет вращательного движения узла 122 относительно узла 123 изменяется угол 107 между обоими узлами 122, 123 на оси 112 вращения. За счет этого может быть выполнено захватное, зажимное или режущее перемещение в зависимости от того, как узлы 122, 123 выполнены механически.
Фиг. 7 и фиг. 8 показывают варианты осуществления роботизированной системы согласно изобретению с одной или же с четырьмя механическими руками и с одним 212а или же с четырьмя 212a-d активными позиционирующими устройствами согласно изобретению. Последующие комментарии относятся к варианту осуществления с механической рукой согласно фиг. 7. Активное позиционирующее устройство 212а соединено с дуговой направляющей 209 посредством устройства предварительного позиционирования в составе узлов 210 и 211. Устройство предварительного позиционирования может быть выполнено пассивным, то есть с производимой вручную перестановкой, или также, предпочтительно, активным, то есть реализованным посредством оборудования шарниров 211 активными исполнительными приводами. Устройство предварительного позиционирования, как таковое, удерживается посредством подходящего крепления, например дуговой направляющей 209. Эта дуговая направляющая 209 может быть позиционирована посредством шарнира 208 относительно пациента. Консоль 207 соединена с перемещаемой несущей системой 205 и делает тем самым возможным позиционирование всей несущей системы (в составе 205, 207…212а) относительно операционного стола 206. Посредством блока 200 управления и индикации оператору сообщается актуальный статус устройства 210, 211 предварительного позиционирования. Посредством блока 200 управления и индикации оператор может подавать управляющие команды, которые посылаются через подходящий канал 201 передачи данных в блок 202 управления, а от него, в активное позиционирующее устройство 212а, в устройство 210, 211 предварительного позиционирования, а также в дуговую направляющую 209 для последующей обработки. Блок 202 управления соединен с несущей системой посредством подходящего канала 203 передачи данных. Операционный стол 206 может быть соединен в аспекте техники управления через канал 204 передачи данных также с блоком 202 управления для того, чтобы при изменении положения операционного стола, например его высоты, обрабатывать это изменение положения в блоке управления и достигать активного отслеживания активным позиционирующим устройством 212а посредством устройства 210, 211 предварительного позиционирования и/или положения дуговой направляющей 209. Тем самым могут быть активно компенсированы изменения положения пациента за счет изменений положения операционного стола 206.
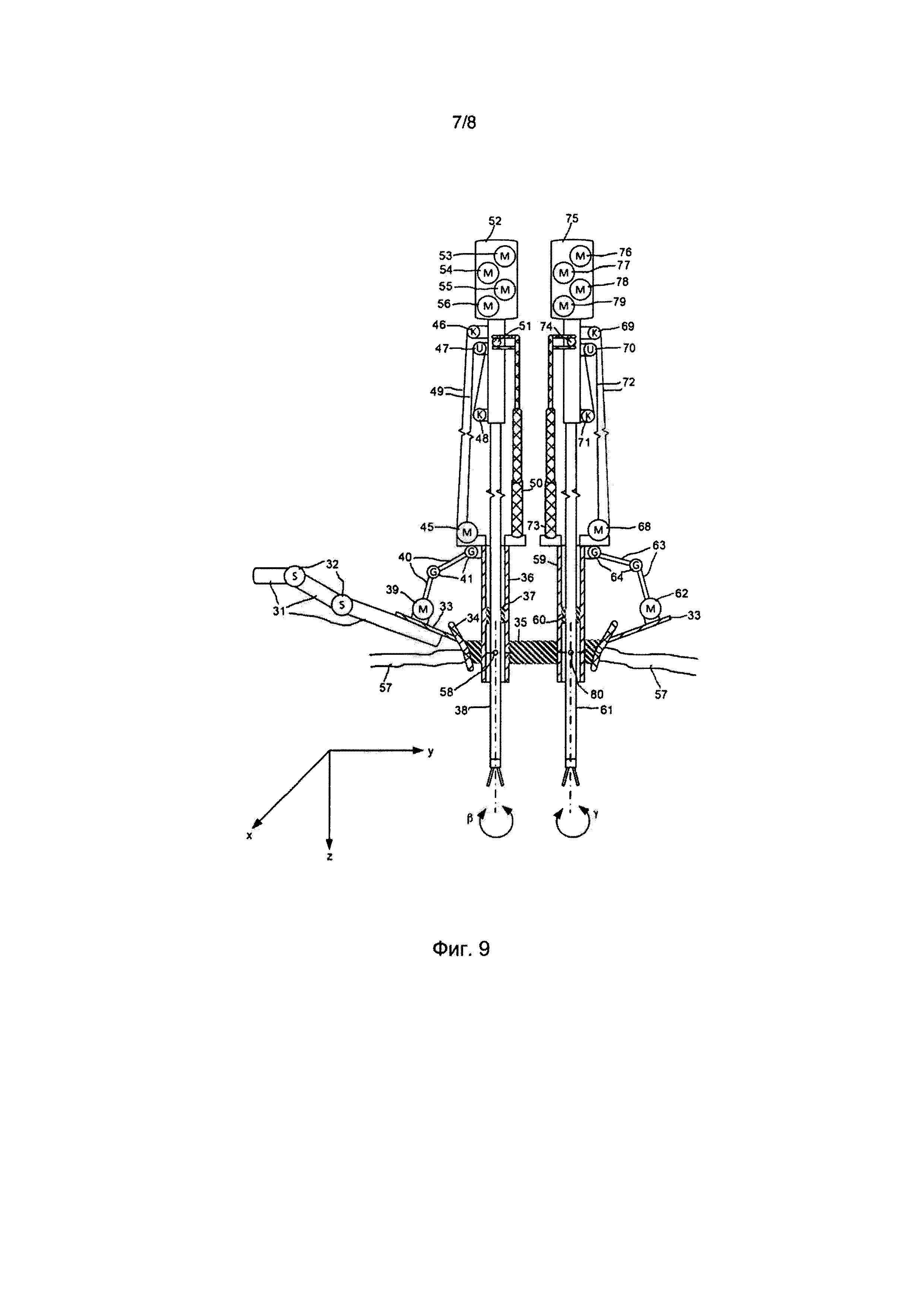
Фиг. 9, а также фиг. 10 показывают активное позиционирующее устройство согласно изобретению для двух хирургических инструментов на общем порте, которое размещено на механической руке. Во время минимально-инвазивного, лапароскопического вмешательства вступают в действие, как правило, четыре операционных инструмента, из них три хирургических инструмента и одна камера или же эндоскоп, которыми управляет оператор посредством телеманипуляторной системы. Поэтому соответственно изобретению два хирургических инструмента на общем порте (одиночном порте) посредством двух отдельных направляющих устройств могут быть введены в тело пациента, и управляться посредством в каждом случае одного активного позиционирующего устройства на хирургический инструмент независимо друг от друга. Поэтому в соответствии с этим, в системе предпочтительно имеются в наличии два варианта осуществления активного троакара или же активного позиционирующего устройства для доступа через одиночный порт. Тем не менее, подразумевается, что также варианты осуществления с одним или более чем двумя активным троакарами для доступа через одиночный порт попадают в пределы правовой охраны изобретения. Каждый активный троакар укреплен независимо от силы тяжести посредством механической руки 31, которая может быть снабжена шарнирами 32. Следовательно, такой механизм крепления должен быть предусмотрен для каждого активного троакара. Все механизмы крепления могут быть укреплены на общем основании (смотри фиг. 4), или на раздельных основаниях. Крепление на раздельных основаниях может иметь смысл, когда этого требует расположение троакаров для хирургического вмешательства.
С механической рукой 31 жестко соединена несущая панель 33 активного троакара. Эта несущая панель 33, в свою очередь, жестко соединена с портирующим устройством 34. Портирующее устройство 34, со своей стороны, посредством компенсирующего элемента 35 соединено с направляющими устройствами 36 и 59. Посредством компенсирующего элемента 35 сделано возможным перемещение (наклон) направляющих устройств 36 и 59 по отношению к портирующему устройству 34. За счет этого перемещения реализуется поворотное перемещение хирургических инструментов 38 и 61. Направляющие устройства 36 и 59 принимают хирургические инструменты 38 и 61. Посредством прокладочных колец 37 и 60 производится газонепроницаемое уплотнение хирургических инструментов 38 и 61 по отношению к направляющим устройствам 36 и 59. При лапароскопии брюшная полость «накачивается» за счет введения газа (двуокиси углерода, CO2) для обеспечения оператору большей свободы передвижений для проведения настоящего хирургического вмешательства. Для предотвращения удаления газа требуется уплотнение 37 или же 60.
Приводные устройства или же исполнительные приводы 39, 42, а также 62, 65 расположены в каждом случае ортогонально друг другу. Посредством механизмов 40, 41, 43, 44, а также 63, 64, 66, 67 рычага на шаровой опоре усилия к верхнему концу направляющего устройства 36 или же 59 прикладывают таким образом, что оно взаимно независимо перемещается относительно портирующего устройства 4 по двум осям (x, y).
Другие исполнительные приводы 45, 68 размещены на верхних концах направляющих устройств 36 и 59. Посредством механической части исполнительного привода в составе зажима 46, отклоняющего ролика 47, зажима 48 и соответствующих гибких тяг 49 реализуется линейное перемещение инструмента 38 в z-направлении. Посредством механической части исполнительного привода в составе зажима 69, отклоняющего ролика 70, зажима 71 и соответствующих гибких тяг 72 реализуется линейное перемещение инструмента 61 в z-направлении.
Телескопическая система 50 посредством удерживающего устройства 51 соединена с приводным узлом инструмента 52 таким образом, что предотвращается вращательное перемещение B хирургического инструмента 38 вокруг оси z. Вращательное перемещение B хирургического инструмента 38 реализуется посредством вращательного привода 53, который соединен со хвостовиком хирургического инструмента 38. Приводные устройства инструментов 54, 55 и 56 реализуют перемещения хирургического инструмента 38 со степенями свободы 105, 106 и 107, смотри фиг. 6.
Телескопическая система 73 посредством удерживающего устройства 74 соединена с приводным узлом 75 инструмента таким образом, что предотвращается вращательное перемещение у хирургического инструмента 61 вокруг оси z. Вращательное перемещение у хирургического инструмента 61 реализуется посредством вращательного привода 76, который соединен со хвостовиком хирургического инструмента 61. Приводные устройства инструментов 77, 78 и 79 реализуют перемещения хирургического инструмента 61 со степенями свободы 105, 106 и 107, смотри фиг. 6.
Фиг. 10 показывает горизонтальную проекцию активного позиционирующего устройства согласно фиг. 9, по которой очевидно, что оба направляющих устройства 36, 59 простираются через общий компенсирующий элемент 35. Прежде всего, из фиг. 10 следует, что первое регулировочное устройство 39, 40, 41, 42, 43, 44 для первого направляющего устройства 36 и второе регулировочное устройство 62, 63, 64, 65, 66, 67 для второго направляющего устройства 59 для обоих хирургических инструментов расположены таким образом, что предотвращено воспрепятствование или же ограничение для обоих соответствующих регулировочных устройств.
В целом данное изобретение тем самым относится к активному позиционирующему устройству, в котором для минимально-инвазивной хирургии один или также несколько хирургических инструментов могут быть применены насквозь через троакар.
Эндоскоп для минимально-инвазивной хирургии, а также хирургическая роботизированная система
Устройство удержания инструментов для манипулятора роботизированной хирургической системы
Роботизированная операционная система

