Результат интеллектуальной деятельности: УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ
Вид РИД
Изобретение
Устройство относится к точной механике и может быть использовано для: реверсивного или обратного проектирования; обнаружения, регистрации и идентификации незадокументированных изменений при изготовлении опытных образцов продукции; контроля качества изготовления изделий; оцифровки созданного вручную дизайн-макета изделия, как основы для дальнейшей проработки; изготовления факсимильной упаковки для готового изделия; представления удаленным экспертам результатов разрушающих испытаний, последствий аварий и катастроф, воздействий взрывов; визуализации участков местности с естественными формами рельефа; создания наглядного представления применительно к обучению на примерах и совершенствования деятельности медиков, криминалистов, археологов (сканирование повреждений и дегенеративных изменений костей, суставов, черепа, мягких тканей); оцифровки физических макетов для мультимедиа-приложений (например, компьютерных игр), создания в натуральную величину или в уменьшенном масштабе копий (при использовании 3D принтера) уникальных объектов (произведений искусства, ювелирных изделий, предметов материальной культуры различных эпох, возможно, со следами износа, повреждений, ремонта); воссоздания по сохранившимся фрагментам цельных форм произведений прикладного искусства; создания цифровых музеев скульптуры и архитектуры, макетов городов.
Известно устройство трехмерного сканирования, содержащее первую платформу, вторую платформу, первый шаговый двигатель с первым вращающимся валом, второй шаговый двигатель со вторым вращающимся валом, первый кронштейн и дальномер, при этом первый вращающийся вал первого шагового двигателя установлен на первой платформе, второй шаговый двигатель установлен на второй платформе посредством первого кронштейна, причем первый шаговый двигатель механически сопряжен со второй платформой, а дальномер сопряжен с вторым вращающимся валом [http://riggershop.ru/catalog/lazernye_dalnomery/leica_3d_disto?r1=yandext&r2=&ymclid=798255766976714137500001].
Недостаток этого устройства заключается в том, что для сканирования пространства второму шаговому двигателю необходимо поднять на определенный угол дальномер с помощью вала и остановить, и продолжать делать такие итерации до окончания сканирования. В результате образования люфта и колебаний во время остановки качество трехмерного изображения ухудшается. Технический результат изобретения заключается в повышении качества трехмерного изображения.
Указанный технический результат достигается тем, что в устройство трехмерного сканирования, содержащее первую платформу, вторую платформу, первый шаговый двигатель с первым вращающимся валом, второй шаговый двигатель со вторым вращающимся валом, первый кронштейн и дальномер, при этом первый вращающийся вал первого шагового двигателя установлен на первой платформе, второй шаговый двигатель установлен на второй платформе посредством первого кронштейна, причем первый шаговый двигатель механически сопряжен со второй платформой, введено зеркало, сопряженное со вторым вращающимся валом второго шагового двигателем, дальномер установлен на второй платформе, при этом зеркало оптически сопряжено с дальномером.
Существует вариант, в котором в устройство введен первый энкодер с первой вращающейся частью, установленный между второй платформой и первым шаговым двигателем, при этом первая вращающаяся часть первого энкодера механически сопряжена с первым вращающимся валом первого шагового двигателя.
Существует вариант, в котором в устройство введен второй энкодер со второй вращающейся частью, установленный между первым кронштейном и вторым шаговым двигателем, при этом вторая вращающаяся часть второго энкодера механически сопряжена со вторым вращающимся валом второго шагового двигателя.
Существует вариант, в котором в устройство введен редуктор с вращающимся центром, установленный между второй платформой и первым энкодером, при этом вращающийся центр редуктора механически сопряжен с первой вращающейся частью первого энкодера.
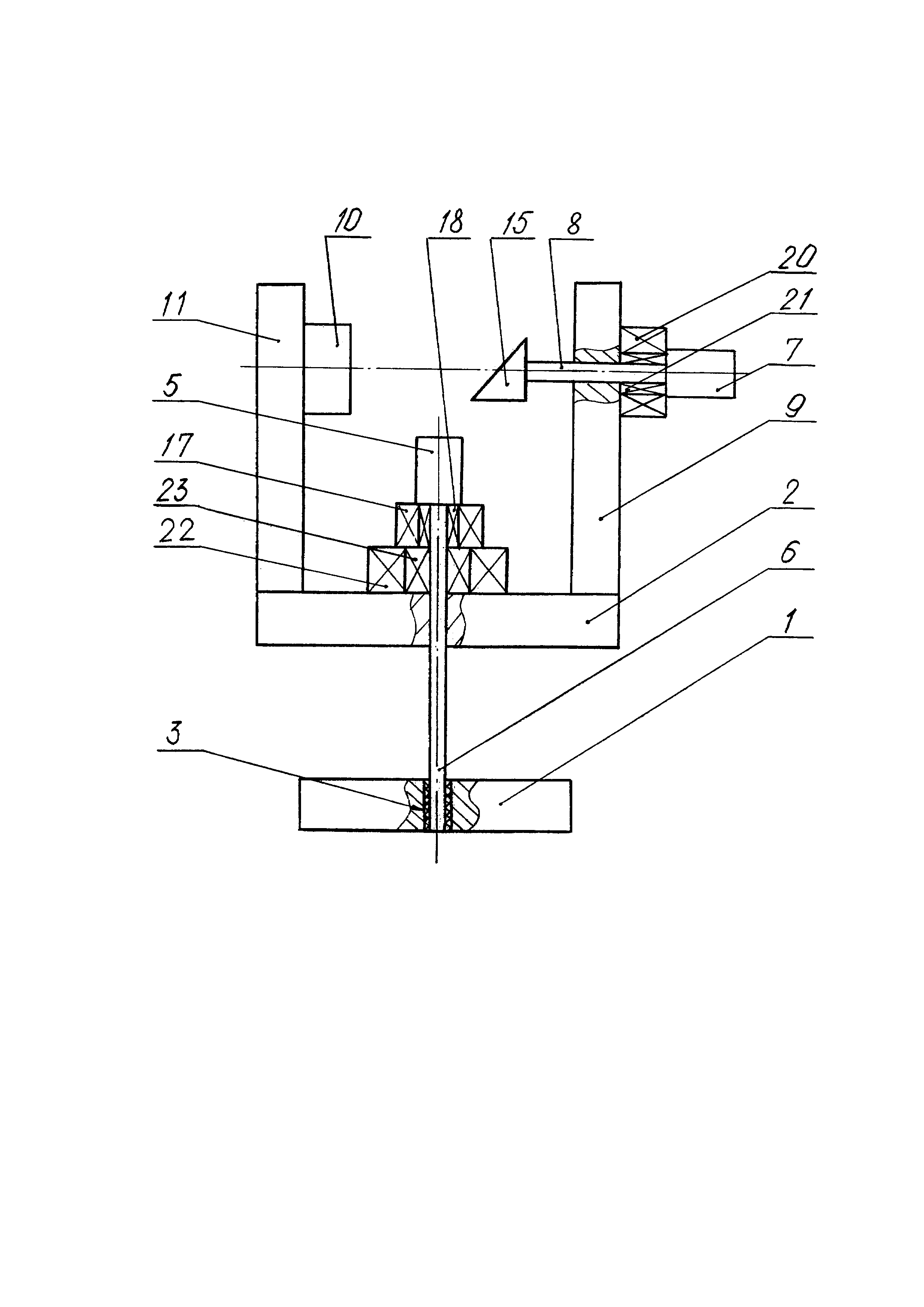
На прилагаемом чертеже представлена компоновочная схема устройства трехмерного сканирования.
Устройство трехмерного сканирования содержит первую платформу 1, сопряженную со второй платформой 2. Содержит также первый шаговый двигатель 5 с первым вращающимся валом 6, второй шаговый двигатель 7 со вторым вращающимся валом 8, первый кронштейн 9 и дальномер 10. В качестве первого шагового двигателя 5 и второго шагового двигателя 7 могут быть использованы шаговые двигатели PL39H26-D5, сервомоторы RDS 3128, бесколекторные двигатели МТ2216. В качестве дальномера 10 можно использовать лазерный дальномер Lightware SF30/C, световой дальномер Sharp (20-150). При этом первый вращающийся вал 6 первого шагового двигателя 5 установлен на первой платформе 1 посредством элемента 3, в качестве которого можно использовать различные крепежные элементы (например, запрессованная втулка, болт, гайка, шуруп и т.п.). Второй шаговый двигатель 7 установлен на второй платформе 2 посредством первого кронштейна 9. Первый шаговый двигатель 5 механически сопряжен со второй платформой 2. В устройство введено зеркало 15, сопряженное со вторым вращающимся валом 8 второго шагового двигателем 7. Дальномер 10 установлен на второй платформе 2 посредством второго кронштейна 11. Зеркало 15 оптически сопряжено с дальномером 10.
В одном из вариантов в устройство введен первый энкодер 17 с первой вращающейся частью 18, установленный между второй платформой 2 и первым шаговым двигателем 5. Первая вращающаяся часть 18 первого энкодера 17 механически сопряжена с первым вращающимся валом 6 первого шагового двигателя 5. В качестве первого энкодера 17 можно использовать энкодер ЛИР-238А-3-Н, энкодер ES3-01PN6941.
В одном из вариантов в устройство введен второй энкодер 20 со второй вращающейся частью 21, установленный между первым кронштейном 9 и вторым шаговым двигателем 7. Вторая вращающаяся часть 21 второго энкодера 20 механически сопряжена со вторым вращающимся валом 8 второго шагового двигателя 7. В качестве второго энкодера 20 можно использовать энкодер ЛИР-238А-3-Н, энкодер ES3-01PN6941.
В одном из вариантов в устройство введен редуктор 22 с вращающимся центром 23, установленный между второй платформой 2 и первым энкодером 17. Вращающийся центр 23 редуктора 22 механически сопряжен с первой вращающейся частью 18 первого энкодера 17. В качестве редуктора 22 можно использовать червячный редуктор, планетарный редуктор и др.
Устройство трехмерного сканирования работает следующим образом.
Дальномер 10 испускает лазерный луч в направлении наклонной отражающей поверхности зеркала 15, образующей с лазерным лучом угол равный 45 градусам. В результате отражения лазерный луч оказывается отклоненным на 90 градусов (на чертеже условно направленным вверх). Далее лазерный луч распространяется по прямой до ближайшего препятствия. Часть энергии луча образует отраженный лазерный луч, направленный под углом 180 градусов от препятствия (отраженный луч двигается по той же траектории, что и до отражения, но в обратном направлении - к устройству, на чертеже условно вниз по направлению к наклонной отражающей поверхности зеркала 15). Достигнув наклонной отражающей поверхности зеркала 15, отраженный луч снова отклоняется на 90 градусов и, в результате, оказывается направленным к дальномеру 10. Достигнув дальномера 10, отраженный луч регистрируется дальномером 10, в результате чего дальномер 10 определяет пройденное лучом расстояние. Искомое же расстояние до препятствия, при столкновении с которым произошло отражение луча, оказывается равным измеренному дальномером расстоянию за вычетом кратчайшего расстояния между дальномером 10 и наклонной отражающей поверхностью зеркала 15. Большинство представленных на современном рынке дальномеров способны производить вышеописанные измерения с частотой 100 Гц и более.
В процессе сканирования происходит вращение зеркала 15 по оси вращения вращающегося вала 8 (посредством шагового двигателя 7), за счет чего достигается измерение расстояний до точек окружающего пространства в вертикальной плоскости (получение своеобразного среза окружающего пространства). Также происходит вращение устройства по оси вращения вращающегося вала 6 (посредством шагового двигателя 5), за счет чего достигается вращение в горизонтальной плоскости и, таким образом, измерение расстояний до точек во всей сфере пространства вокруг устройства. На оси вращения вращающегося вала 6 также расположен редуктор 22 с вращающимся центром 23, позволяющий замедлить и сделать более равномерным и плавным вращение шагового двигателя 5 (скорость вращения устройства вокруг этой оси заметно ниже, чем скорость вращения в оси вращения вращающегося вала 8, на котором расположено зеркало 15, что позволяет использовать редуктор).
На валах 8 и 6 находятся энкодеры 20 и 17 соответственно. С их помощью с определенной периодичностью осуществляется измерение текущих угловых координат вращающихся валов 8 и 6. Вместе с поступающими от дальномера данными о расстоянии до препятствий получаются тройки значений, образующих координаты точек окружающего устройство пространства в сферической системе координат. Также выполняется необходимая синхронизация считывания данных, предоставляемых дальномером 10, энкодерами 20 и 17.
Сферическая система координат предполагает тройки значений (r, θ, ϕ), где r - кратчайшее расстояние до начала координат, θ - зенитный угол, ϕ - азимутальный угол. В контексте устройства r - показания дальномера, θ - показания второго энкодера в 20, ϕ - показания первого энкодера 17.
То, что в устройство трехмерного сканирования, содержащее первую платформу 1, вторую платформу 2, первый шаговый двигатель 5 с первым вращающимся валом 6, второй шаговый двигатель 7 со вторым вращающимся валом 8, первый кронштейн 9 и дальномер 10, при этом первый вращающийся вал 6 первого шагового двигателя 5 установлен на первой платформе 1, второй шаговый двигатель 7 установлен на второй платформе 2 посредством первого кронштейна 9, причем первый шаговый двигатель 5 механически сопряжен со второй платформой 2, введено зеркало 15, сопряженное со вторым вращающимся валом 8 второго шагового двигателем 7, дальномер 10 установлен на второй платформе 2, при этом зеркало 15 оптически сопряжено с дальномером 10 приводит к повышению качества трехмерного изображения.
То, что в устройство введен первый энкодер 17 с первой вращающейся частью 18, установленный между второй платформой 2 и первым шаговым двигателем 5, при этом первая вращающаяся часть 18 первого энкодера 17 механически сопряжена с первым вращающимся валом 6 первого шагового двигателя 5 приводит к повышению качества трехмерного изображения.
То, что в устройство введен второй энкодер 20 со второй вращающейся частью 21, установленный между первым кронштейном 9 и вторым шаговым двигателем 7, при этом вторая вращающаяся часть 21 второго энкодера 20 механически сопряжена со вторым вращающимся валом 8 второго шагового двигателя 7 приводит к повышению качества трехмерного изображения.
То, что в устройство введен редуктор 22 с вращающимся центром 23, установленный между второй платформой 2 и первым энкодером 17, при этом вращающийся центр 23 редуктора 22 механически сопряжен с первой вращающейся частью 18 первого энкодера 17 приводит к повышению качества трехмерного изображения.
Устройство трехмерного сканирования, содержащее первую платформу (1), вторую платформу (2), первый шаговый двигатель (5) с первым вращающимся валом (6), второй шаговый двигатель (7) со вторым вращающимся валом (8), первый кронштейн (9) и дальномер (10), при этом первый вращающийся вал (6) первого шагового двигателя (5) установлен на первой платформе (1), второй шаговый двигатель (7) установлен на второй платформе (2) посредством первого кронштейна (9), причем первый шаговый двигатель (5) механически сопряжен со второй платформой (2), содержащее также зеркало (15), сопряженное со вторым вращающимся валом (8) второго шагового двигателем (7), при этом дальномер (10) установлен на второй платформе (2), причем зеркало (15) оптически сопряжено с дальномером (10), содержащее также первый энкодер (17) с первой вращающейся частью (18), установленный между второй платформой (2) и первым шаговым двигателем (5), при этом первая вращающаяся часть (18) первого энкодера (17) механически сопряжена с первым вращающимся валом (6) первого шагового двигателя (5), содержащее также второй энкодер (20) со второй вращающейся частью (21), установленный между первым кронштейном (9) и вторым шаговым двигателем (7), при этом вторая вращающаяся часть (21) второго энкодера (20) механически сопряжена со вторым вращающимся валом (8) второго шагового двигателя (7), отличающееся тем, что в него введен редуктор (22) с вращающимся центром (23), установленный между второй платформой (2) и первым энкодером (17), при этом вращающийся центр (23) редуктора (22) механически сопряжен с первой вращающейся частью (18) первого энкодера (17).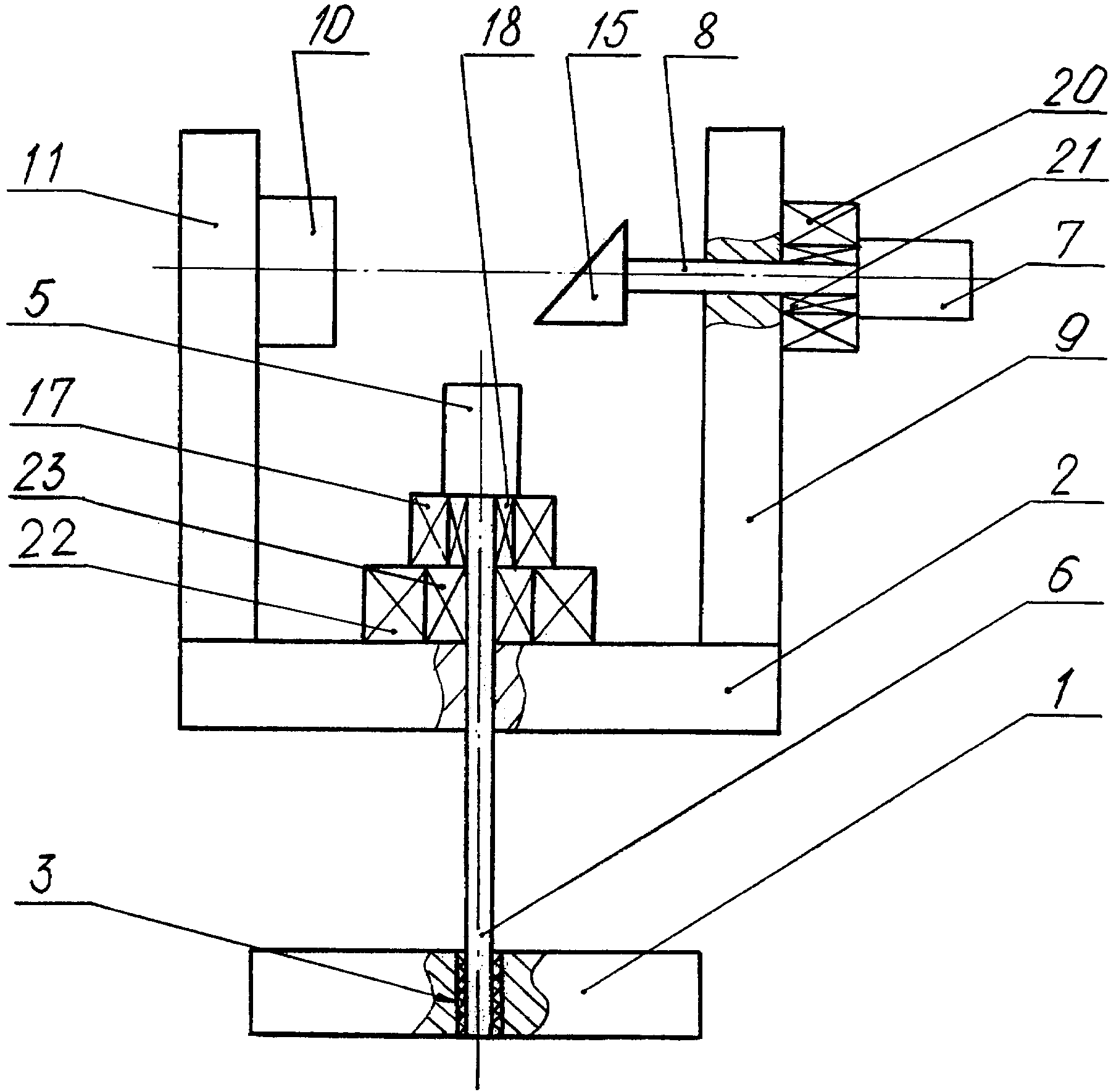
Устройство обнаружения движущегося объекта
Устройство обнаружения биоритма
Устройство обнаружения слабоколеблющихся объектов
Устройство обнаружения слабопульсирующих объектов
Состав и способ получения фильтра на основе пористого поливинилформаля
Способ очистки дренажных вод емкостей хранения нефтепродуктов и устройство для его осуществления
Способ получения стойкого композиционного покрытия на металлических деталях
Устройство магнитного крепления

