Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА
Вид РИД
Изобретение
Предлагаемое изобретение «Система автоматического управления высотным положением рабочего органа дреноукладчика» относится к строительству дренажа, трубопроводов и касается систем автоматизации дренажных и других машин.
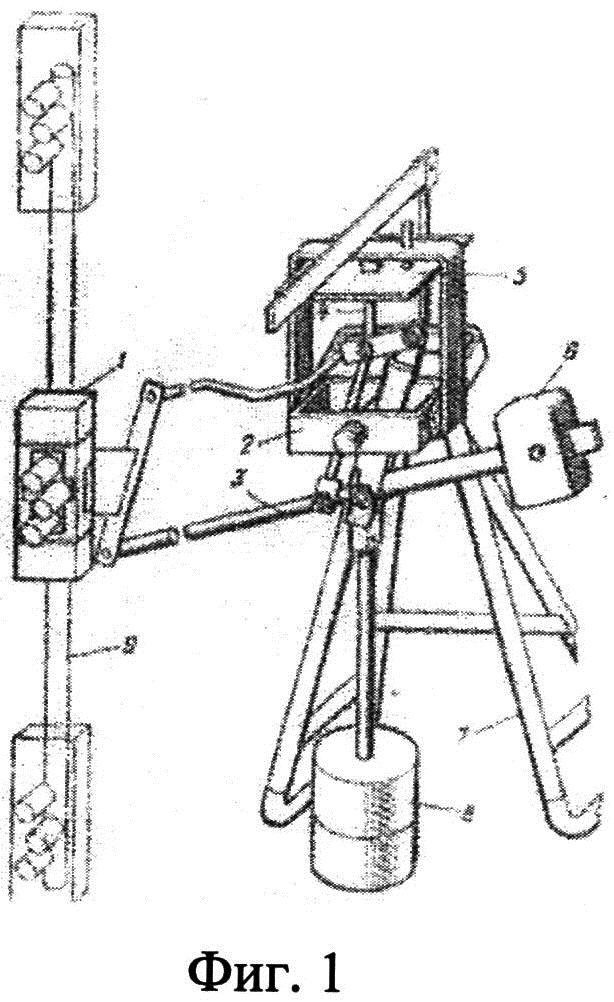
Прототипом предлагаемого изобретения является система автоматического управления (САУ) высотным положением рабочего органа дреноукладчика с приводом вращения ковшевой, скребковой цепи рабочего органа от турасного вала [1]. Система состоит из передатчика, формирующего лазерный луч, приемника, маятниковой подвески приемника, пульта управления, электрогидроблока, исполнительного гидроцилиндра. Маятниковая подвеска приемника служит для устранения ошибок, возникающих при повороте рабочего органа дреноукладчика вокруг турасного вала, когда изменяется вертикальное расстояние от приемника до дна траншеи. Маятниковая подвеска приемника (фиг. 1) состоит из рамки 2, параллелограмма 3, копирного пальца 4, корректирующей пластины 5, противовеса 6, кронштейна 7 крепления на рабочем органе дреноукладчика, груза 8, удлинителя 9, который обеспечивает установку приемника в трех фиксированных положениях. Корректирующая пластина 5 с упирающим в нее копирным пальцем 4 предназначена для сохранения высотных положений приемника относительно дна траншеи независимо от поворота рабочего органа на турасном валу.
Однако указанная система САУ дреноукладчика с маятниковой механической подвеской приемника обладает следующими недостатками:
- корректирующая пластина устанавливается и ориентируется с ошибками, которые вносят погрешность в определении величины компенсации перемещений приемника,
- большое трение между пальцем и пластиной и в узлах подвески, препятствующие удержанию вертикального положения приемника,
- раскачивание грузов под действием толчков и ветровой нагрузки также нарушают вертикальное положение приемника, что приводит к снижению точности укладки дрены,
- наклоны дреноукладчика в продольной и поперечной плоскостях создают дополнительную погрешность в компенсации перемещений приемника,
- отсутствие возможности плавного регулирования высотного положения приемника относительно рабочего органа затрудняет начальную установку приемника и лазерного передатчика, увеличивает вынужденные простои дреноукладчика и исключает применение другого способа укладки Дрен.
Целью изобретения является устранение перечисленных недостатков, повышение точности укладки дрен и расширение функциональных возможностей САУ. Указанная цель достигается тем, что система автоматического управления высотным положением рабочего органа дреноукладчика с приводом вращения ковшевой, скребковой цепи рабочего органа от турасного вала, содержащая передатчик, формирующий лазерный луч, приемник с маятниковой подвеской, пульт управления, электрогидроблок и исполнительный гидроцилиндр, отличается тем, что приемник закреплен на штоке актуатора, снабженного электроприводом с датчиком линейных перемещений штока и неподвижно соединенного с грузом и шарнирно соединенного с кронштейном рабочего органа, на котором установлены датчики угловых положений в продольном и поперечном направлениях движения, при этом дреноукладчик снабжен датчиком пути и программатором, входы которого подключены к выходам датчика линейных перемещений штока актуатора и выходам датчиков угловых положений, а выходы программатора подсоединены к входам электропривода перемещений штока актуатора, причем программатор дополнительно снабжен режимом ввода проектного уклона дрены и входы программатора подключены к выходам датчика пути, а выходы программатора подсоединены к входам электропривода перемещений штока актуатора. При этом актуатор закреплен на маятниковом стержне, снабженном грузом и полушаром, помещенным в полусферу, которая закреплена при помощи кольца на основании, соединенном с кронштейном рабочего органа, причем на основании закреплен стакан, а на дне его под грузом установлен демпфер.
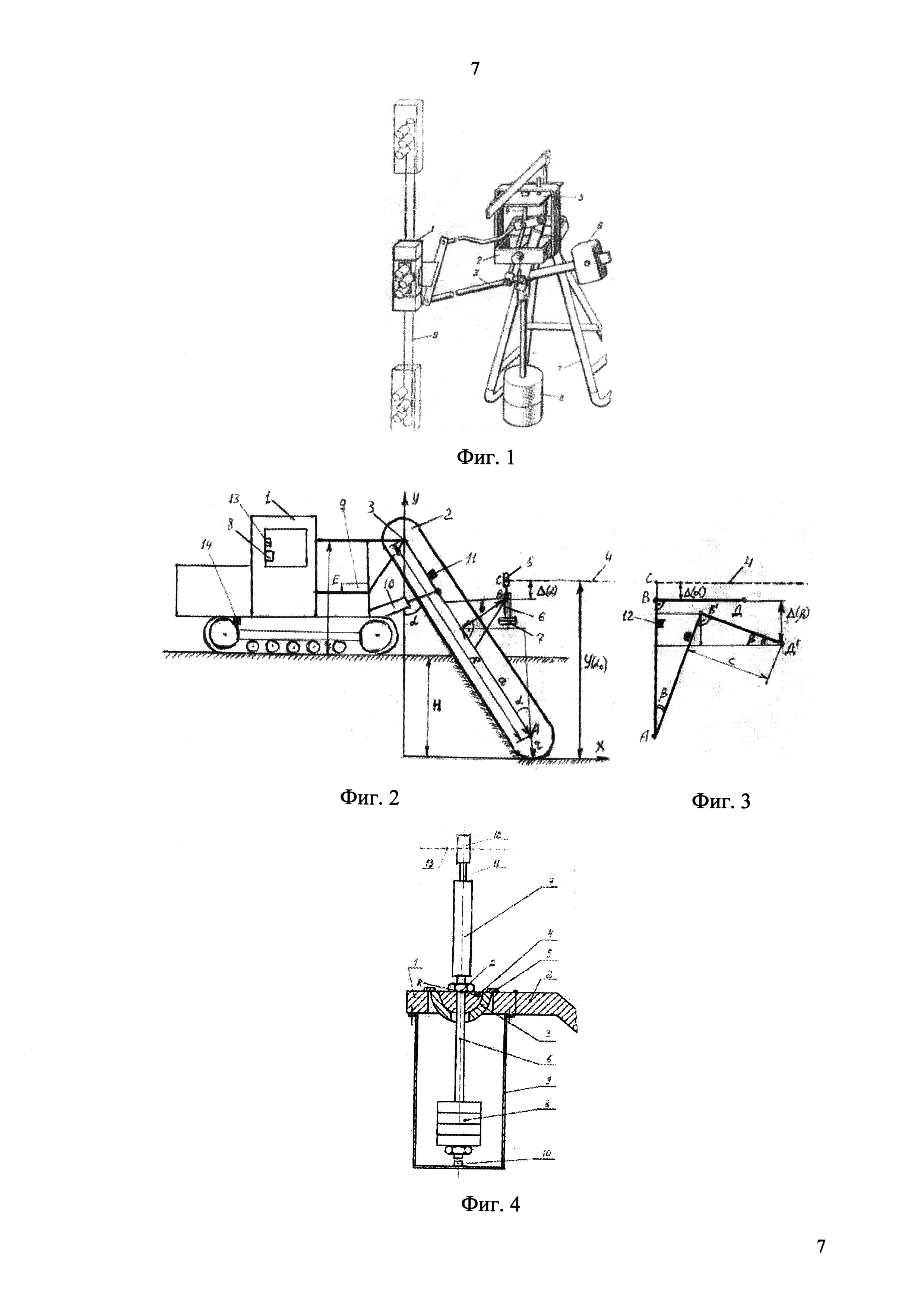
Изобретение иллюстрируется фигурами 1-5, где на фиг. 1 дана схема прототипа с маятниковой подвеской приемника, фиг. 2 схема дреноукладчика с САУ, на фиг. 3 - схема поперечного наклона шарнира актуатора на угол β от начального положения АВД до наклонного положения АВ'Д', на фиг. 4 - схема маятниковой подвески актуатора.
САУ дреноукладчика 1 с рабочим органом 2, поворачивающимся вокруг турасного вала 3, состоит из передатчика, формирующего лазерный луч 4, приемника 5, актуатора 6, который снабжен электроприводом с датчиком линейных перемещений штока и неподвижно закреплен на маятниковом стержне 7. Стержень неподвижно соединен с грузом и шарнирно с кронштейном, закрепленным на рабочем органе 2. На дреноукладчике размещены пульт управления 8, электрогидроблок 9, исполнительный гидроцилиндр 10, датчики углов наклона 11 и 12 рабочего органа в продольной и поперечной плоскостях движения, программатор 13 и датчик пути 14. Выходы датчика линейных перемещений штока актуатора 6 и датчиков угловых положений 12 и 12 подключены к входам программатора 13, а его выходы подсоединены к входам электропривода актуатора 6. Программатор 13 дополнительно снабжен режимом ввода проектного уклона дрены, а входы программатора подключены к выходам датчика пути 14 и выходы программатора подсоединены к входам электропривода актуатора 6 (фиг. 2 и 3).
Маятниковая подвеска актуатора состоит из основания 1, закрепленного на кронштейне 2 рабочего органа дреноукладчика, полусферы 3, скользящего в ней полушара 4, кольца 5, скрепленного с полусферой и основанием, и маятникового стержня 6, скрепленного с полушаром, актуатором 7 и грузом 8. Для снижения колебаний груз помещен в стакан 9 с магнитным демпфером 10. На штоке 11 актуатора закреплен приемник 12, вырабатывающий сигналы управления относительно лазерного луча 13.
Программа программатора определяется следующим алгоритмом (фиг. 2 и 3):
 ,
,
 ,
,
 ,
,
где У(αо) - начальная глубина копания при вводе центра приемника в лазерный луч, см,
r - радиус обтекания ковшевой цепи на натяжном ролике, см,
а, в, с - постоянные размеры от центра натяжного ролика до точки подвеса актуатора и поперечный вынос точки подвеса относительно вертикальной оси рабочего органа, см,
αо - продольный угол наклона рабочего органа в зависимости от начальной глубины копания, град,
Δ(αо) - начальное положение центра приемника при вводе его в лазерный луч относительно точки подвеса, см,
α, β - продольный и поперечный углы наклона рабочего органа, град,
Δ(α), Δ(β) - величины компенсаций перемещений центра приемника относительно точки подвеса в продольной и поперечной плоскостях, см.
Другой способ укладки дрен достигается САУ с датчиком пути 14 и актуатором 6. В этом случае лазерный луч 4 устанавливают горизонтально. Программатор 13, снабженный режимом ввода проектного уклона дрены, вычисляет величину компенсации Δ высотных перемещений приемника 5 относительно рабочего органа 2 по выражению (фиг. 2):
 ,
,
где Δо - начальное положение центра приемника на лазерном луче относительно точки подвеса см,
х - пройденный путь, см,
tg δ - проектный уклон дрены.
САУ дреноукладчика с приводом вращения ковшевой, скребковой цепи рабочего органа от турасного вала работает следующим образом. В начале работы при помощи программатора 13 и штока актуатора 6 приемник 5 устанавливают на центр лазерного луча 4, тем самым определяя начальное положение центра приемника Δ(αо) относительно шарнира Д в зависимости от начальной глубины копания. При смещении центра приемника 5 вверх или вниз относительно лазерного луча 4 приемник 5 вырабатывает сигнал управления, который последовательно передается на пульт управления 8, электрогидроблок 9 и исполнительный гидроцилиндр 10, возвращающий центр приемника снова на лазерный луч, что приводит к изменению значений одного или двух датчиков угла наклона 11. Вслед за этим программатор вычисляет по формулам 1-3 новое значение компенсации и сравнивает его с предыдущим значением фактического вертикального положения штока актуатора 6, измеряемого датчиком линейных перемещений. Программатор 13 при появлении разности между этими значениями включает электропривод актуатора 6, перемещая его шток с приемником 5 в сторону устранения этой разности, и выключает его, когда разность этих величин равна нулю, что обеспечивает в процессе работы начальную сохранность положения приемника У(αо) относительно дна траншеи при изменении глубины копания. В случае одновременного поступления двух сигналов от датчиков 11 и 12 программатор 13 и актуатор 6 сначала отрабатывают сигнал от датчика 11, а затем от датчика 12 (фиг. 2 и фиг. 3). В процессе работы при изменении углов наклона рабочего органа 2 (фиг. 4) маятниковый стержень 6 с грузом, актуатором 7 и приемником 12 постоянно занимает вертикальное положение за счет скольжения полушара 4 в полусфере 3. При этом раскачивание стержня 6 с грузом 8 устраняется демпфером 10, а стакан 9 исключает влияние ветра на положение груза.
Применение предлагаемой САУ на дреноукладчиках с турасным валом обеспечивает наибольшую точность укладки дрен, поскольку возникающие ошибки при повороте рабочего органа полностью устраняются перемещениями приемника на штоке актуатора по командам программатора.
При работе дреноукладчика с САУ и датчиком пути 14 сначала устанавливают передатчик, формирующий горизонтальное положение лазерного луча. Программатор 13 вычисляет величину перемещения штока актуатора 6 с приемником 5 по формуле 4 и включает электропривод актуатора, перемещающего шток с приемником 5 относительно рабочего органа 2 до момента, когда фактическая величина положения штока, измеряемая датчиком линейных перемещений, сравняется с вычисленным значением. Одновременно САУ удерживает центр приемника 5 на лазерном луче 4 по цепи управления: луч 4 - приемник 5 - пульт управления 8-электрогидроблок 9 - гидроцилиндр 10 - рабочий орган 2 - приемник 5. При этом рабочий орган отрывает траншею с уклоном дрены, задаваемым перемещениями приемника (фиг. 2 и 3). При одновременной работе датчиков наклона и пути программатор с актуатором сначала отрабатывают сигналы от датчиков наклона, а затем от датчика пути.
Применение САУ с датчиком пути позволяет укладывать дрены с различными и переменными уклонами без перестановки передатчика и его настройки, что значительно снижает подготовительные работы и исключает простои машины. Кроме того, возможно применять одновременно несколько дреноукладчиков, работающих от одного лазерного передатчика с круговым горизонтальным вращением луча на площади строительства до 50 га.
Источники информации
1. А.Н. Ефремов, А.К. Камальдинов, А.И. Мармалев, В.Г. Самородов. Лазерная техника в мелиоративном строительстве. М.: Агропромиздат, 1989 - с. 223. (см. рис. 4.1 на стр. 119 и рис. 4.5 на стр. 126).
Способ планировки земель
Устройство автоматической разгрузки грунта из ковша планировщика - скрепера
Способ планировки земель
Устройство автоматической разгрузки грунта из ковша планировщика - скрепера

