Результат интеллектуальной деятельности: Способ измерения угловых координат цели
Вид РИД
Изобретение
Заявляемое техническое решение относится к области радиолокации и может быть использовано для измерения угловых координат целей с помощью обзорной радиолокационной станции (РЛС).
Известный способ измерения угловой координаты цели θ (угла места ε или азимута β включает излучение зондирующих сигналов, прием и обнаружение отраженных сигналов, формирование одномерных угловых пакетов обнаруженных двоично квантованных сигналов по измеряемой координате, оценивание угловой координаты θ из уравнения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, стр. 46):

где xi - двоично квантованные сигналы (xi = 1 или 0) в пакете по измеряемой угловой координате цели θ;
i и n - номер и количество положений луча соответственно в пакете обнаруженных сигналов (i = 1, ... , n);
η(θi, θ) - весовой коэффициент для сигнала в i-м положении луча в пакете обнаруженных сигналов;
θi - значение угловой координаты положения луча с номером i в пакете обнаруженных сигналов.
Под одномерным угловым пакетом обнаруженных сигналов понимается группа соседних по измеряемой угловой координате положений луча, в которых в одной или нескольких ближайших дискретах дальности обнаружены отраженные сигналы.
Как отмечается в приведенном источнике, оценивание угловой координаты θ «реализуется путем скачкообразного сдвига весовой функции η(θi, θ) относительно принятой реализации нулей и единиц в пакете. Процесс сдвига повторяется до тех пор, пока сумма не станет равной нулю (или меньше по абсолютной величине некоторого фиксированного числа)».
Техническая проблема известного способа состоит в недостаточной точности измерения угловых координат. Причиной этого является то, что в способе используется бинарное обнаружение сигнала, при котором уровень принятого сигнала не измеряется, используется только факт превышения сигналом порога обнаружения.
Наиболее близкий способ измерения угловых координат цели включает излучение зондирующих сигналов, прием, обнаружение и измерение уровня (отношения сигнал/шум) отраженных сигналов, формирование двумерных угловых пакетов обнаруженных сигналов, выделение в пакете положения луча с максимальным уровнем сигнала, определение угловых координат цели (угла места ε и азимута β) из математического выражения (патент РФ №2581898).
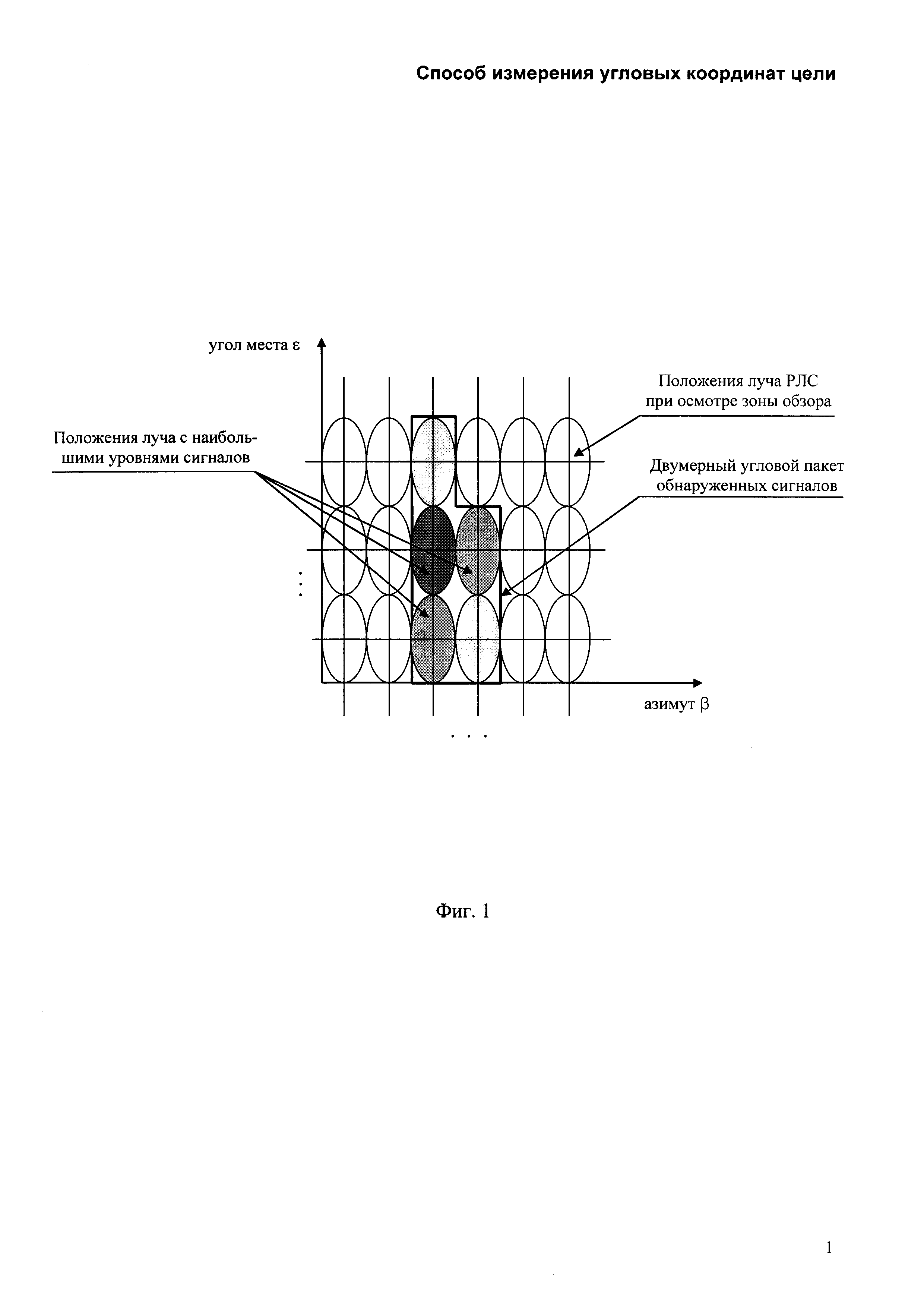
Под двумерным угловым пакетом сигналов понимается группа соседних по угловым координатам положений луча, в которых в одной или нескольких ближайших дискретах дальности обнаружены отраженные сигналы (фиг. 1).
Техническая проблема наиболее близкого способа состоит в недостаточной точности измерения угловых координат. Последовательность и уровень сложности операций в наиболее близком способе определены исходя из относительно низких характеристик вычислительных средств РЛС. Поскольку современные бортовые ЭВМ имеют значительно большее быстродействие и объем памяти, то может быть применен способ измерения угловых координат, основанный на измерении уровней принимаемых сигналов, позволяющий значительно увеличить точность измерения угловых координат цели.
Таким образом, техническим результатом заявляемого способа является повышение точности измерения угловых координат цели.
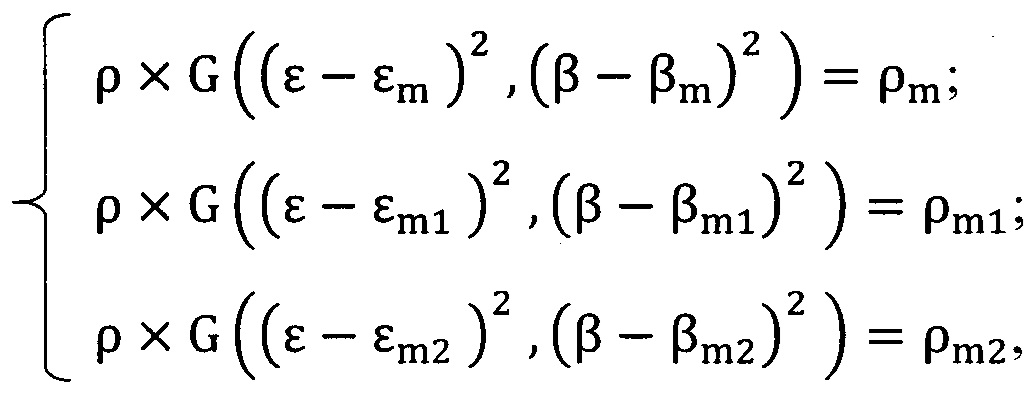
Технический результат (решение технической проблемы) достигается тем, что в способе измерения угловых координат цели, включающем излучение зондирующих сигналов, прием, обнаружение и измерение уровней отраженных сигналов, формирование двумерных угловых пакетов обнаруженных сигналов, выделение в пакете положения луча с максимальным уровнем сигнала ρm, определение угловых координат цели: угла места е и азимута β - из математического выражения, согласно изобретению в положениях луча, оставшихся после выделения положения с максимальным уровнем сигнала, дополнительно выделяют два положения луча с наибольшими уровнями сигналов ρm1 и ρm2, угловые координаты цели ε и β определяют из системы уравнений:

где ρ - уровень сигнала от цели на входе антенны;
ρi - уровень сигнала от цели в положениях луча, соответствующих трем наибольшим уровням сигналов в пакете, i = m, m1, m2;
εi, βi - угловые координаты луча по углу места и азимуту, соответствующие трем наибольшим уровнями сигналов в пакете, i = m, m1, m2;
 - зависимость нормированного к максимуму уровня ДНА в i-м (i = m, m1, m2) положении луча в пакете сигналов от угловых координат цели ε и β.
- зависимость нормированного к максимуму уровня ДНА в i-м (i = m, m1, m2) положении луча в пакете сигналов от угловых координат цели ε и β.
Поясним суть заявляемого способа измерения угловых координат цели.
Поскольку перемещающийся при обзоре пространства луч РЛС в каждом положении частично перекрывается с лучом в предыдущих положениях, то отраженный от цели сигнал принимается в нескольких соседних положениях луча. При этом уровни сигналов соответствуют различным уровням ДНА. В каждом положении луча проводят операции обнаружения сигнала (фиксируют факт превышения порога обнаружения), измеряют уровень обнаруженного сигнала. Если в соседних положениях луча сигналы обнаруживаются без пропуска, то их объединяют в двумерный угловой пакет. Известный вид ДНА, известные координаты положений луча в пакете и измеренные уровни отраженных от цели сигналов позволяют определить угловые координаты цели путем решения системы трех нелинейных уравнений (1).
Для получения наиболее точного решения в систему включают уравнения, соответствующие положениям луча εi, βi (i = m, m1, m2) в пакете с наибольшими уровнями сигналов ρm, ρm1, ρm2.
Решение системы уравнений (1) осуществляют с использованием бортового вычислителя одним из известных численных методов, описанным, например, в книге: Калиткин Н.Н. Численные методы. - М.: Наука, 1978.
Таким образом достигается заявляемый технический результат и решается техническая проблема.
Изобретение иллюстрируется следующими чертежами.
Фиг. 1 - пример двумерного углового пакета обнаруженных сигналов: черным цветом обозначено положение луча с максимальным уровнем сигнала в пакете, темно-серыми - два дополнительно выделенных положения луча с наибольшими уровнями, светло-серым - остальные положения луча в пакете.
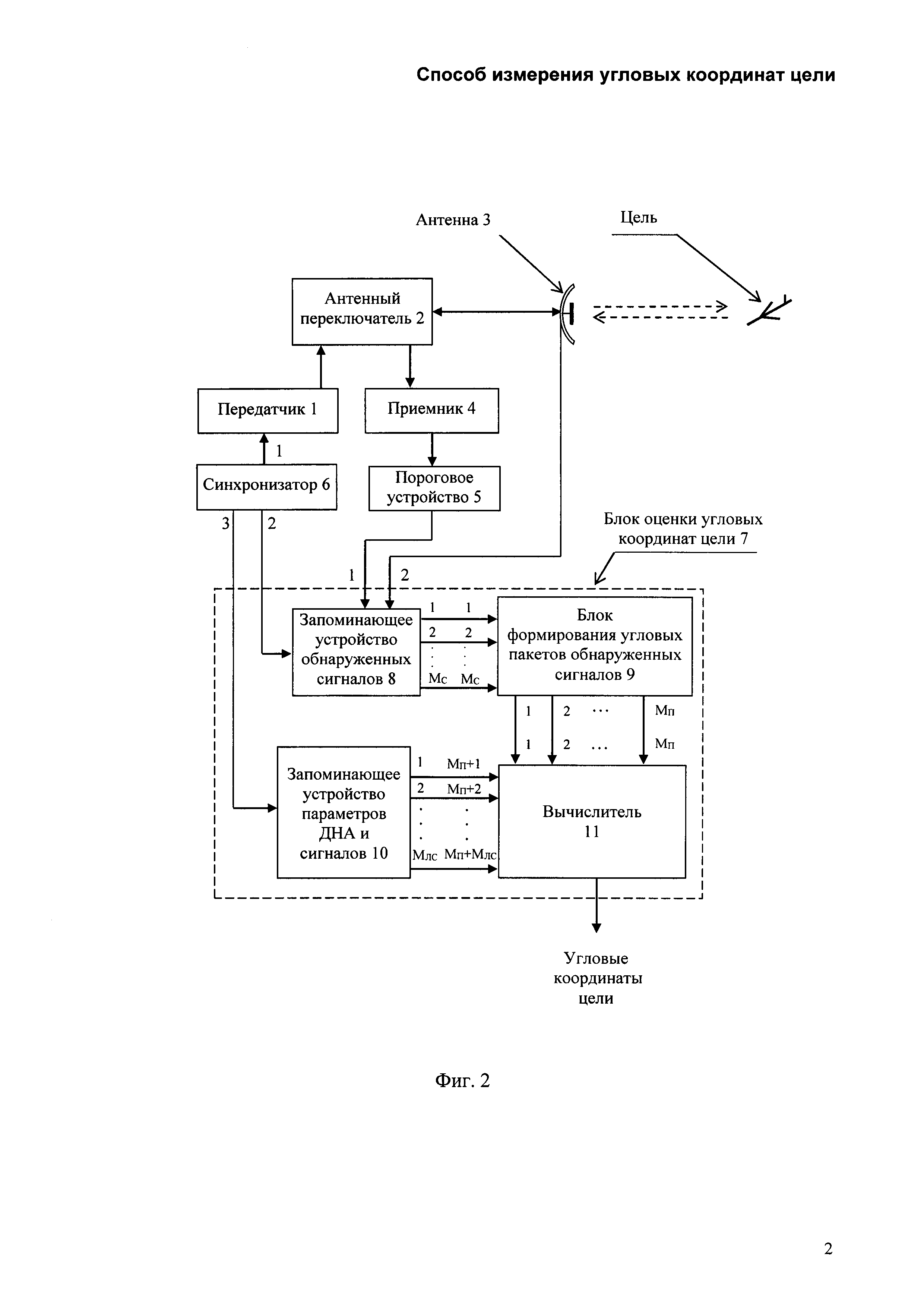
Фиг. 2 - блок-схема РЛС, реализующей заявляемый способ.
Заявляемый способ реализуется с помощью радиолокационной станции, которая содержит (фиг. 2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат цели 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат цели 7, блок оценки угловых координат цели 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования угловых пакетов обнаруженных сигналов 9, запоминающее устройство параметров ДНА и сигналов 10 и вычислитель 11, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат цели 7 соответственно, выходы с 1-го по МC запоминающего устройства обнаруженных сигналов 8 соединены соответственно со входами с 1-го по МC блока формирования угловых пакетов обнаруженных сигналов 9, выходы с 1-го по МП которого соединены соответственно со входами с 1-го по МП вычислителя 11, выходы с 1-го по МЛС запоминающего устройства параметров ДНА и сигналов 10 соединены соответственно со входами с МП + 1-го по МП + МЛС вычислителя 11. Выход вычислителя 11 является выходом блока оценки угловых координат цели 7 и выходом РЛС. Первый, второй и третий выходы синхронизатора 6 соединены соответственно с синхровходом передатчика 1, запоминающего устройства обнаруженных сигналов 8 и запоминающего устройства параметров ДНА и сигналов 10.
Количество выходов запоминающего устройства обнаруженных сигналов 8, входов и выходов блока формирования угловых пакетов обнаруженных сигналов 9, выходов запоминающего устройства параметров ДНА и сигналов 10, а также входов вычислителя 11 определяется значениями величин: наибольшим количеством сигналов, которые могут быть обнаружены в зоне обзора (МС), наибольшим количеством угловых пакетов, которые могут быть сформированы в зоне обзора (МП), количеством параметров ДНА и сигналов, которые учитываются при измерении угловых координат цели (МЛС).
Радиолокационная станция, реализующая заявляемый способ, может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с. 278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с. 146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т. 2, - М., 1977, с. 132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с. 343-344).
Пороговое устройство 5, запоминающее устройство обнаруженных сигналов 8, запоминающее устройство параметров ДНА и сигналов 10 выполнены на основе стандартных цифровых элементов (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984).
Синхронизатор 6 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М., 1970, с. 602-603).
Блок формирования угловых пакетов обнаруженных сигналов 9 - вычислитель, реализующий операцию объединения обнаруженных сигналов в двумерный угловой пакет обнаруженных сигналов (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984).
Вычислитель 11 - цифровой вычислитель, реализующий операции вычисления угловых координат цели с помощью численного решения системы нелинейных уравнений (1) (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984).
РЛС, реализующая заявляемый способ измерения угловых координат цели, работает следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные сигналы принимаются антенной 3, поступают в приемник 4, где измеряется их уровень (отношение сигнал/шум по мощности), и далее - на вход порогового устройства 5, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый (обнаруженные), проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, соответствующие угловым координатам луча антенны 3, поступают в блок оценки угловых координат цели 7. Уровни обнаруженных сигналов с соответствующими угловыми координатами луча по мере его перемещения в процессе обзора записываются в запоминающем устройстве обнаруженных сигналов 8. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов обнаруженных сигналов 9, где осуществляется анализ взаимного положения обнаруженных сигналов и формирование пакетов сигналов. В запоминающем устройстве параметров ДНА и сигналов 10 заранее, то есть до начала работы РЛС, записываются параметры ДНА (ширина луча по угловым координатам, шаг перемещения луча при осмотре зоны обзора и др.), зондирующих сигналов (уровень, длительность и др.), параметры обработки принятого сигнала, которые должны быть учтены в каждом положении луча в пакете при определении угловых координат цели. Координаты положений луча в пакетах сигналов, а также другие указанные параметры подаются соответственно с выходов блока формирования угловых пакетов обнаруженных сигналов 9 и запоминающего устройства параметров ДНА и сигналов 10 на соответствующие входы вычислителя 11. В вычислителе 11 в каждом пакете сигналов выделяются три положения луча εi, βi, i = m, m1, m2 с наибольшими уровнями сигналов (ρm, ρm1, ρm2) и численным решением системы нелинейных уравнений (1) определяются угловые координаты цели ε и β.
Таким образом, в РЛС, реализующей заявляемый способ, достигается заявляемый технический результат и решается техническая проблема.
Способ осмотра зоны обзора и радиолокационная станция для его реализации
Устройство обработки сигнала (варианты)
Способ обзора пространства радиолокационной станцией
Способ радиолокационного обзора зоны пространства
Способ обнаружения траектории объекта
Способ радиолокационного обнаружения сигналов, отраженных от целей, и устройство для его реализации
Способ селекции движущихся целей и устройство для его реализации
Способ сопровождения траектории цели и радиолокационная станция для его реализации
Способ обзора зоны радиолокационной станции
Способ сопровождения траектории цели

