Результат интеллектуальной деятельности: Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съёмке рельефа дна акватории, и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к гидрографии, в частности, к способам и техническим средствам определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории.
Известен широко используемый в настоящее время способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, включающий погружение до заданного горизонта или до дна акватории приемной гидроакустической антенны (вибратора) эхолота или отражающей поверхности в виде доски (диска), закрепленными на маркированном кабель-тросе или тросе, соответственно, при этом осуществляется излучение гидроакустического сигнала судовым эхолотом и прием этого же сигнала погруженным приемным вибратором или прием отраженного этого же сигнала от отражающей поверхности приемной антенной судового эхолота, измерение гидроакустическим способом глубины погружения приемного вибратора или отражающей поверхности Zэ с одновременным определением этой же глубины погружения (горизонта тарирования) Zгт маркированным тросом, определение по полученным данным поправки ΔZт к глубине, измеренной эхолотом расчетным путем по следующей формульной зависимости

где Нв - углубление излучающего вибратора судового эхолота;
 - горизонтальное расстояние между излучающим вибратором судового эхолота и опускаемыми приемной антенной или отражающей поверхностью (см., например, «Инструкция по промеру». - Л: издание Управления гидрографической службы ВМФ, 1964 г., - сс. 109-111 [1]).
- горизонтальное расстояние между излучающим вибратором судового эхолота и опускаемыми приемной антенной или отражающей поверхностью (см., например, «Инструкция по промеру». - Л: издание Управления гидрографической службы ВМФ, 1964 г., - сс. 109-111 [1]).
Известно так же тарирующее устройство однолучевого эхолота (см. там же), содержащее передатчики и измерительный приемный блок, расположенные на судне и подключенные соответственно к излучающему судовому вибратору и приемному погружаемому вибратору, блок управления, соединенный с измерительным приемным блоком и передатчиком, причем погружаемый приемный вибратор закреплен на кабель-тросе с метками для измерения глубины погружения приемной антенны.
Недостатки известных способа и тарирующего устройства определения поправок к глубинам, измеренных однолучевым эхолотом при съемке рельефа дна, заключается в том, что они имеют недостаточную точность и ограниченную глубину тарирования.
Это объясняется тем, что глубина погружения приемного вибратора или тарирующей доски Zгт определяется глазомером по меткам на кабель-тросе или маркирующем тросе относительно уровня воды без учета прогиба кабель-троса вследствие воздействия на погруженный приемный вибратор или доску (диск) подводного течения и дрейфа судна. Это приводит к тому, что поправка эхолота, вычисляемая без учета изменения величин Zгт и , определяется неточно. Вследствие того, что с увеличением глубины удержания погруженных приемного вибратора или тарирующей доски (диска) из-за их значительного дрейфа под воздействием течения в зоне облучения антенны судового эхолота становится затруднительным, это ограничивает возможный диапазон определения поправок глубины, как показывает опыт, до величины в 30-40 м, в результате чего обеспечивается определение поправок по всему диапазону измеряемых эхолотом глубин.
Кроме того, известный способ и тарирующее устройство не отвечают современным требованиям единства измерений, так как не обеспечивают получение поправки с нормированными метрологическими характеристиками.
Погрешность определения поправки ΔZт данным способом и тарирующим устройством можно оценить по формуле, которую можно получить, дифференцируя выражение (1) по переменным Zгт, Нв и и переходя затем к средним квадратическим погрешностям (СКП) определения этих величин:

где σгт, σн,  - СКП определения величин Zгт, Нв и .
- СКП определения величин Zгт, Нв и .
Вычисленные по формуле (2) и отнесенные к глубине горизонта тарирования средние квадратические погрешности (СКП) определения поправки эхолота существующими способом и устройством при значениях Zгт=10; 40 м; R=2,5 м, при погрешностях измерения глубины тарирования от 0,06 до 0,55 ми при погрешности учета горизонтального отстояния погружаемой антенны или отражающей поверхности (доски, диска) от 0,5 до 4,5 м, при СКП измерения заглубления антенны эхолота равной 0,2 м составили от 1,5 до 4% Соответственно такая точность определения поправки существенно снижает качество съемки рельефа дна акватории, поскольку инструментальная погрешность у современных промерных эхолотов составляет 0,03-0,4%. (см., например, Product Survey on Single Beam Echosounders. // Hydro INTERNATIONAL. - 2001. - September. - p. 44-51 [2]).
Известен способ определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна (авторское свидетельство SU №913814 от 16 ноября 1981 г. «Тарирующее устройство эхолота» [3]), включающий погружение до заданного горизонта или до дна в заданном месте (местах) акватории приемного вибратора, излучение гидроакустического сигнала излучающим вибратором по направлению до приемного погружаемого вибратора, измерения расстояния Si между данными вибраторами гидроакустическим способом и с помощью маркированного кабель-троса, а также определение искомых поправок ΔZт расчетным путем.
Известно также тарирующее устройство эхолота [3], содержащее передатчик и измерительный блок, расположенные на судне и подключенные соответственно к излучающими приемным вибраторам, блок управления, соединенный с измерительным приемным блоком и передатчиком, причем приемный вибратор закреплен на маркированном кабель-тросе; излучающий вибратор установлен на корпусе поплавка, в котором имеется отверстие для кабель-троса; метки кабель-троса выполнены в виде утолщений с возможностью взаимодействия со стопорным блоком, который установлен на поплавке и соединен с блоком управления. Стопорный блок выполнен в виде электромагнита с подпружиненным сердечником, который уменьшает отверстие в поплавке.
Недостатком данных способа и устройства определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна, является их недостаточно высокая точность. При их использовании также имеет место погрешность учета искривления кабель-троса и горизонтального отклонения приемной антенны от излучающей антенны эхолота под совместным воздействием сил, обусловленных наличием течения и дрейфа судна. Данная погрешность, как и в предыдущем случае, составит от 1,5 до 4%.
Кроме того, применение известных способа и тарирующего устройства возможно только лишь для устаревших аналоговых промерных эхолотов, поскольку истинное расстояние между излучающим и приемным вибраторами определяется по меткам, расположенным на кабель-тросе глазомерно и по записи на аналоговом регистраторе. Для современных цифровых эхолотов необходимо, чтобы истинная глубина погружения приемного вибратора измерялась прибором с цифровым электронным выходом с целью обеспечения автоматизации процесса определения и учета поправки к глубинам, измеренным современными цифровыми эхолотами при съемке рельефа дна. Таким образом, погрешность определения поправки существующими способами и устройствами превосходит инструментальную погрешность современных эхолотов, а максимальная глубина тарирования не превышает 40 м, что не удовлетворяет современным требованиям к качеству съемки рельефа дна и необходимости определения поправок измерительными средствами с нормированными метрологическими характеристиками во всем диапазоне измеряемых эхолотом глубин.
Кроме того, технология определения поправки эхолота, основанная на известных способах и устройствах тарирования, затрудняет автоматизацию процессов сбора и обработки информации и не обеспечивает требуемую точность тарирования эхолотов.
Тарированием называют такой способ определения поправок, при котором поправки определяют непосредственным сравнением глубин, измеренных эхолотом, с глубинами, полученными другим, заведомо более точным способом (Ушаков Д.Н. Толковый словарь русского языка. T. IV. Изд. Стандартов. 1985 - 256 с. [4]).
Таким образом, для производства сравнения необходим другой, более высокоточный инструмент аналогичного предназначения. В терминах метрологического обеспечения такой инструмент называется рабочим эталоном (Бурдун Г.Д., Марков Б.Н. Основы метрологии. М.: изд. Стандартов, 1985 - 256 с. [5]), который как минимум в три раза должен превосходить по испытываемому параметру исследуемый образец - навигационный эхолот.
Наиболее просто и надежно такое сравнение можно осуществить путем измерения эхолотом глубины погружения в воду какого-либо предмета с одновременным измерением этой же глубины точным мерным прибором. Обычно для тарирования используются специальные тарирующие устройства (диск, доска).
Известен аналогичный способ тарировки навигационного эхолота, включающий контрольную доску, которая представляет собой хорошо отражающую ультразвуковые колебания площадку шириной в несколько десятков сантиметров и достаточной длины для того, чтобы ее можно было расположить горизонтально и одновременно под вибратором-излучателем и под вибратором-приемником (Федоров И.И. Эхолоты и другие гидроакустические средства. Курс кораблевождения. Т. 5. книга 4. Л.: Управление начальника гидрографической службы ВМФ, 1960, - 368 с. [6]. Доска опускается под вибраторы на тросах, разбитых марками для отсчета глубин. Проверка производится при отсутствии хода корабля и спокойном состоянии моря, желательно при отсутствии течения. Контрольная доска подводится под вибраторы, а затем постепенно через определенные интервалы глубины опускается до максимально возможной глубины. На каждой глубине производится определение общей поправки эхолота путем сопоставления фактической глубины погружения доски (которая отсчитывается по маркам на тросах) и показаний эхолота (с учетом углубления вибраторов). Общая поправка эхолота определяется по следующей формуле:

где Нд - глубина погружения контрольной доски;
Нвибр - углубление вибраторов;
Нэ - глубина, измеренная эхолотом.
В свою очередь, точность измерения глубины эхолотом Нэ зависит от конструктивных его особенностей и может быть повышена за счет введения поправок в измеренную глубину. К таким поправкам относятся (Судовые эхолоты / Хребтов А.А. и др. Л.: Судостроение. 1982, с. 178-179 [7]):
ΔНс - поправка на отклонение скорости ультразвука в морской воде от предусмотренной конструкцией эхолота;
ΔНп - поправка на отклонение скорости вращения (числа оборотов) электродвигателя от предусмотренной конструкцией эхолота;
ΔHL - поправка на базу или расстояние между излучателем и приемником эхолота;
ΔНМО - поправка на место нуля отсчета;
ΔНα - поправка на угол α наклона дна в точке измерения глубин.
Эти поправки суммируются и вводятся в глубину Нэ, снимаемую с эхолота.
Контрольная доска обычно опускается на глубину не свыше 30 м, так как на больших глубинах затруднительно получить хорошо фиксированное положение контрольной доски под вибраторами, особенно при наличии течения или качки.
При определении общей поправки эхолота на контрольной доске автоматически учитываются погрешности разбивки шкалы, погрешность на базу и другие систематические погрешности.
Недостатком рассмотренного способа является то, что тарировка может производиться только до незначительных глубин и достаточно трудоемка.
В источнике [6] также приведен способ тарировки навигационного эхолота, включающий контрольный вибратор, который представляет собой вибратор-приемник в кардановом подвесе, опускаемый на тросе с борта судна так, чтобы его рабочая поверхность была бы обращена вверх и оставалась горизонтальной.
В процессе тарировки контрольный вибратор включают в схему в приемном режиме и отключают приемный вибратор, находящийся в корпусе судна. Затем напротив места установки судового вибратора вытравливают вместе с кабелем точно размеченный марками металлический мерный линь диаметром 3-3,5 мм, на нижнем конце которого подвешен контрольный вибратор. Мерный линь вытравливают и выбирают с помощью вьюшки через роульс небольшой кронбалки. Линь маркируют, начиная от верхней плоскости пакета пластин вибратора.
Горизонтальное расстояние между штатным вибратором-излучателем и тросом контрольного вибратора-приемника должно быть возможно меньшим.
Общая поправка эхолота при определении ее по контрольному вибратору определяется из выражения

где НВП - глубина погружения контрольного вибратора-приемника;
НВИ - углубление судового вибратора-излучателя;
l - горизонтальное расстояние между судовым вибратором-излучателем и тросом контрольного вибратора-приемника.
При определении поправки эхолота с помощью контрольного вибратора не учитывается поправка на базу между корабельным (судовым) вибратором эхолота. Поэтому при измерении малых глубин к общей поправке эхолота, полученной по контрольному вибратору, в соответствии с формулой (1.2) должна быть еще добавлена поправка на базу между штатными вибраторами, которая может быть рассчитана по формуле:

где l - база между вибраторами.
Определение поправки эхолота с помощью контрольного вибратора практически может производиться при глубинах погружения этого вибратора до 150 м. Провода, идущие к контрольному вибратору-приемнику, должны быть хорошо экранированы во избежание помех.
Недостатком этого способа является сложность его реализации из-за необходимости подключения дополнительного вибратора-приемника, размещенного в кардановом подвесе, к усилителю эхо-сигналов взамен штатного приемника, а также осуществления тарировки без хода корабля (судна) в районе без течений.
На подводных лодках используется другой прием. Поскольку вибраторы эхолота установлены стационарно и не могут быть перемещены вдоль корпуса подводной лодки, то для тарировки эхолота проводят следующие операции.
Подводная лодка ставится у пирса (причала), где глубина под килем хорошо известна и практически отсутствует влияние внешней среды на нее.
Отмаркированный линь с привязанным грузом опускают сначала с одного борта в районе вибраторов эхолота до тех пор, пока груз не коснется дна, и делают замер по маркам на лине. Определяется осадка подводной лодки и рассчитывается глубина под килем по формуле:

где Н - глубина под килем подводной лодки;
hл - длина вытравленного линя;
hо - осадка подводной лодки;
hk - длина отрезка линя от его начальной точки при измерении до уровня воды (смоченного участка).
В момент снятия отсчета по линю производят замер глубины под килем эхолотом. Подобная операция повторяется с другого борта. Измеренная линем глубина (эталонная) под килем рассчитывается как среднее значение из двух замеров. Аналогично рассчитывается среднее значение глубины, измеренной эхолотом. Поправка эхолота находится из выражения

где  - среднее значение глубины под килем подводной лодки, измеренной эхолотом.
- среднее значение глубины под килем подводной лодки, измеренной эхолотом.
Очевидно, что использовать напрямую известный способ тарировки навигационного эхолота, особенно на крупных подводных объектах не представляется возможным по следующим причинам:
В большинстве случаев корпуса современных подводных объектов имеют овальную форму большого радиуса, что делает невозможным замер глубины с помощью линя и груза без специального устройства. Штатных устройств для проведения тарировки навигационного эхолота на подводных объектах не предусмотрено.
При использовании линя с грузом для определения эталонной глубины под килем подводного объекта может возникнуть ситуация, когда груз при касании грунта, может быть опрокинут, и в показаниях эталонной глубины возникнет погрешность, примерно равная высоте груза. Более того, при наличии течения в районе испытаний возможен изгиб линя с грузом, что вносит дополнительную погрешность в определении эталонной глубины под килем.
При стоянке подводного объекта у пирса возможен случай, когда поверхность дна не будет твердой и ровной. В этом случае показания эталонной глубины не будет соответствовать истинной глубине под килем подводного объекта.
Суммарная погрешность в определении эталонной глубины с помощью линя и груза в лучшем случае не превосходит точность измерения глубины навигационным эхолотом. Из теории метрологического обеспечения известно, что рабочий эталон должен превосходить по точности измерения как минимум в три раза поверяемого средства. По этой причине линь с грузом не может служить в качестве рабочего эталона - средства измерения глубины для сравнения с показаниями навигационного как надводного судна, так и эхолота подводного объекта.
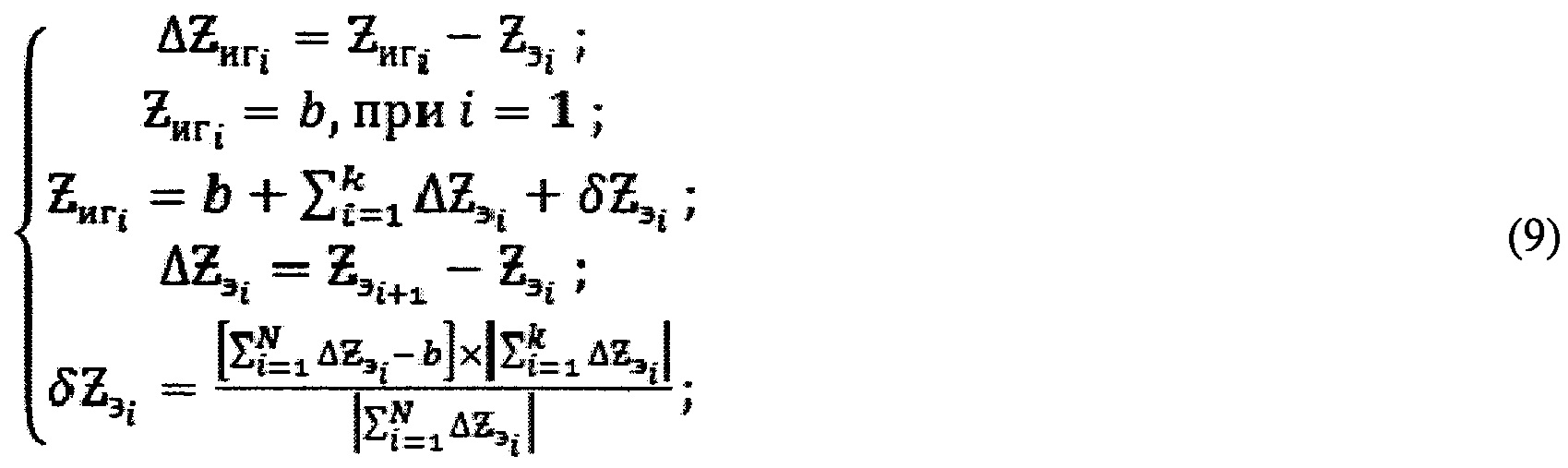
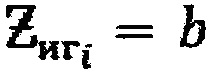
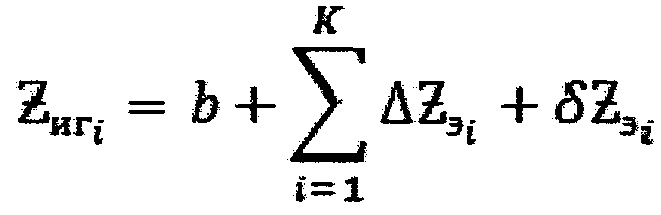
Известен так же способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории (патент RU №2292062, 20.01.2007 «Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, и устройство для его осуществления» [8]), включающий погружение до заданного горизонта или до дна в заданном месте (местах) акватории, а затем подъем до поверхности акватории расположенные на нижнем конце вертикально удерживаемой базы излучающую и приемную антенны эхолота, датчики гидростатического давления и температуры, а на верхнем конце базы датчики гидростатического давления и температуры, при этом погружении и подъеме одновременно с излучением гидроакустического сигнала и измерением расстояния до поверхности воды дополнительно синхронно измеряют гидростатическое давление и температуру на верхнем и нижнем концах базы, фиксируют исправленные температурной поправкой величины гидростатического давления, начиная с момента погружения и заканчивая моментом всплытия верхнего конца базы, а истинные значения поправок ΔZгт глубин определяют расчетным путем по следующим формульным зависимостям:
 ;
;
 , при i=1;
, при i=1;

 , при i>1,
, при i>1,
где i (i=1, 2, …, N) - номер посылки излучающего вибратора, начиная с момента погружения в воду верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
 - истинная глубина горизонта тарирования (погружения приемного вибратора), определенная путем измерения гидростатического давления на концах вертикально удерживаемой базы;
- истинная глубина горизонта тарирования (погружения приемного вибратора), определенная путем измерения гидростатического давления на концах вертикально удерживаемой базы;
 - расстояние до поверхности воды - глубина горизонта тарирования, измеренная гидроакустическим способом;
- расстояние до поверхности воды - глубина горизонта тарирования, измеренная гидроакустическим способом;
b - длина вертикальной базы;
 ,
,  _ гидростатические давления, измеренные при i-ом излучении вибратора эхолота датчиками гидростатического давления свойственно на нижнем и верхнем концах базы и исправленные поправкой за измеренную датчиками температуру воды на глубине положения гидростатических датчиков;
_ гидростатические давления, измеренные при i-ом излучении вибратора эхолота датчиками гидростатического давления свойственно на нижнем и верхнем концах базы и исправленные поправкой за измеренную датчиками температуру воды на глубине положения гидростатических датчиков;
 ,
,  - гидростатические давления, измеренные соответственно при i-й и i-1-й излучениях вибратором эхолота и исправленные поправкой за измеренную температуру воды на глубине положения гидростатических датчиков, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
- гидростатические давления, измеренные соответственно при i-й и i-1-й излучениях вибратором эхолота и исправленные поправкой за измеренную температуру воды на глубине положения гидростатических датчиков, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме на поверхность акватории;
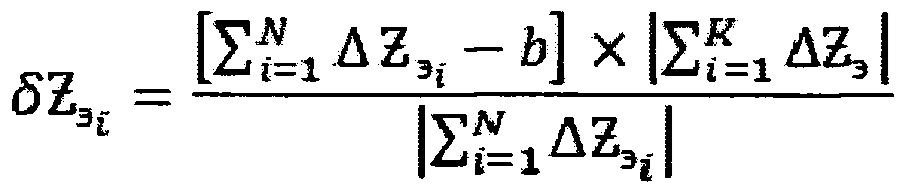
δZi - поправка глубины горизонта тарирования (погружения приемного вибратора) в случае образования невязки (b-Zгт) при достижении верхним концом базы поверхности воды.
Известно так же тарирующее устройство эхолота [8], содержащее передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор, блок управления, соединенный с измерительным приемным блоком, базу с положительной и отрицательной плавучестью, закрепленную в кардановом подвесе с возможностью спуска на заданный горизонт тарирования и подъема до поверхности воды в вертикальном положении, на верхнем конце которой закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления совместно с излучающей и приемной антеннами и датчиками гидростатического давления и температуры на нижнем конце базы и датчиками гидростатического давления и температуры на верхнем конце базы, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, с возможностью излучения гидроакустического сигнала до поверхности акватории по вертикали и приема отраженного от нее сигнала, блок определения поправок к глубинам, измеренным эхолотом, вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом регистратора.
Недостатком данных способа и устройства определения поправок к глубинам, измеренных однолучевым эхолотом при съемке рельефа дна акватории, является то, что процесс определения данных поправок сложен и трудоемок, поскольку необходимо использование для определения эталонной глубины двух гидростатических датчиков и двух датчиков температуры воды.
Это обусловлено тем, что на акватории съемки рельефа дна в местах определения данных поправок необходимо калибровать датчики измерения гидростатического давления и температуры воды с целью определения цены деления их измерительных шкал и определения ухода нуля их отсчета в течение определенного времени. Для чего необходимо иметь на съемочном судне метрологическую лабораторию со специальной метрологической аппаратурой.
В процессе погружения датчиков гидростатического давления и температуры воды необходимо обеспечить синхронность их измерения гидростатического давления и температуры воды на концах базы. Для чего необходимо иметь четырехканальный измерительный приемным блок со специальным блоком управления.
Кроме того, известные способ и устройство [8], не обеспечивают определения геодезических координат глубины погружения приемоизлучающей гидроакустической антенны однолучевого эхолота, а следовательно, не обеспечивают создания на акватории съемки опорных гидрографических пунктов для калибровки эхолотов на акватории съемки с целью обеспечения единства измерений.
Известно также техническое решение (заявка RU №2015145074/28(069390) от 20.10.2015 [9]), технический результат которого заключается в упрощение процесса определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории и расширения функциональных возможностей путем обеспечения определения геодезических координат глубины погружения приемоизлучающей антенны эхолота в процессе определения данных поправок, а следовательно, обеспечения создания на акватории съемки рельефа дна опорных гидрографических пунктов для калибровки эхолота на акватории съемки с целью обеспечения единства измерений.
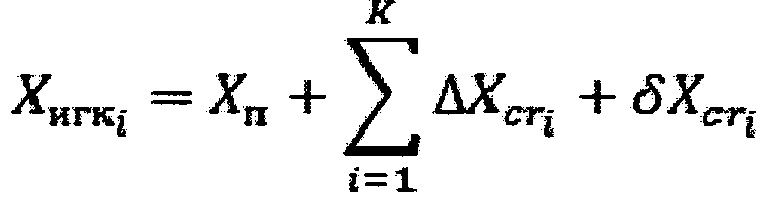
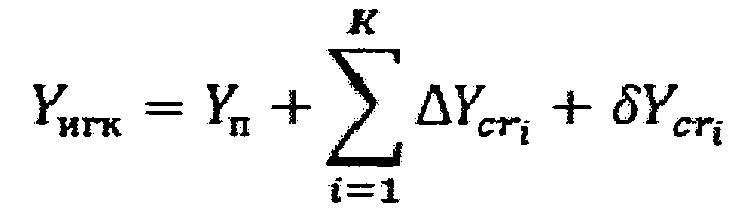
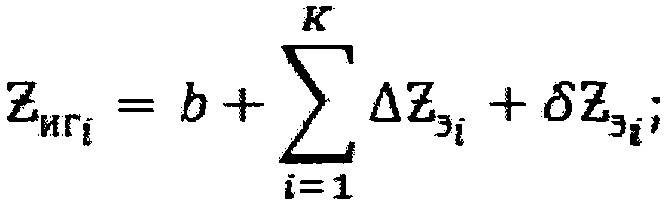
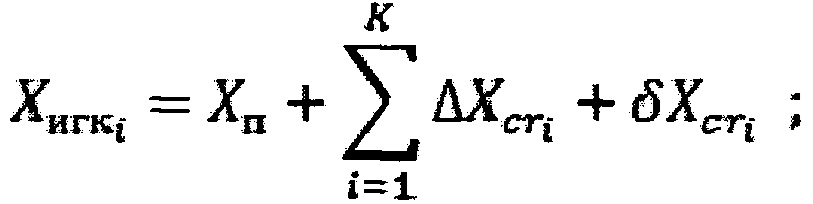
При этом поставленная задача достигается тем, что в известном способе определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории [9], включающем погружение до заданного горизонта или до поверхности дна акватории в заданном месте (местах) акватории приемоизлучающую гидроакустическую антенну однолучевого эхолота, расположенную на нижнем конце базы известной длины, закрепленную в кардановом подвесе с возможностью погружения и подъема ее по вертикали и излучения по вертикали гидроакустических сигналов до поверхности воды акватории и приема отраженных данных сигналов от поверхности воды акватории данной антенной, измерения глубины погружения указанной антенны гидроакустическим путем iZэi, определения искомых глубин  , искомых поправок
, искомых поправок  к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, расчетным путем, фиксируют в моменты погружения и всплытия верхнего конца базы «в» глубины погружения Zэi приемоизлучающей гидроакустической антенны, измеренную гидроакустическим путем, длину базы «b» принимают за истинную опорную глубину, по измеренным значениям глубин Zэi погружения приемоизлучающей гидроакустической антенны, определяют приращения ΔZэi между смежными глубинами
к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, расчетным путем, фиксируют в моменты погружения и всплытия верхнего конца базы «в» глубины погружения Zэi приемоизлучающей гидроакустической антенны, измеренную гидроакустическим путем, длину базы «b» принимают за истинную опорную глубину, по измеренным значениям глубин Zэi погружения приемоизлучающей гидроакустической антенны, определяют приращения ΔZэi между смежными глубинами  и
и  , определяют геодезические координаты мест погружения Хп, Yп и всплытия Хв, Yв базы, а также счислимые геодезические координаты
, определяют геодезические координаты мест погружения Хп, Yп и всплытия Хв, Yв базы, а также счислимые геодезические координаты  ,
,  места нахождения данной антенны в течении времени погружения ее до заданного горизонта или до поверхности воды акватории верхнего конца базы «b», по полученным данным определяют искомые поправки ΔZэi к глубинам Zэi, и искомые их геодезические координаты Xигк, Yигк по следующим формульным зависимостям:
места нахождения данной антенны в течении времени погружения ее до заданного горизонта или до поверхности воды акватории верхнего конца базы «b», по полученным данным определяют искомые поправки ΔZэi к глубинам Zэi, и искомые их геодезические координаты Xигк, Yигк по следующим формульным зависимостям:
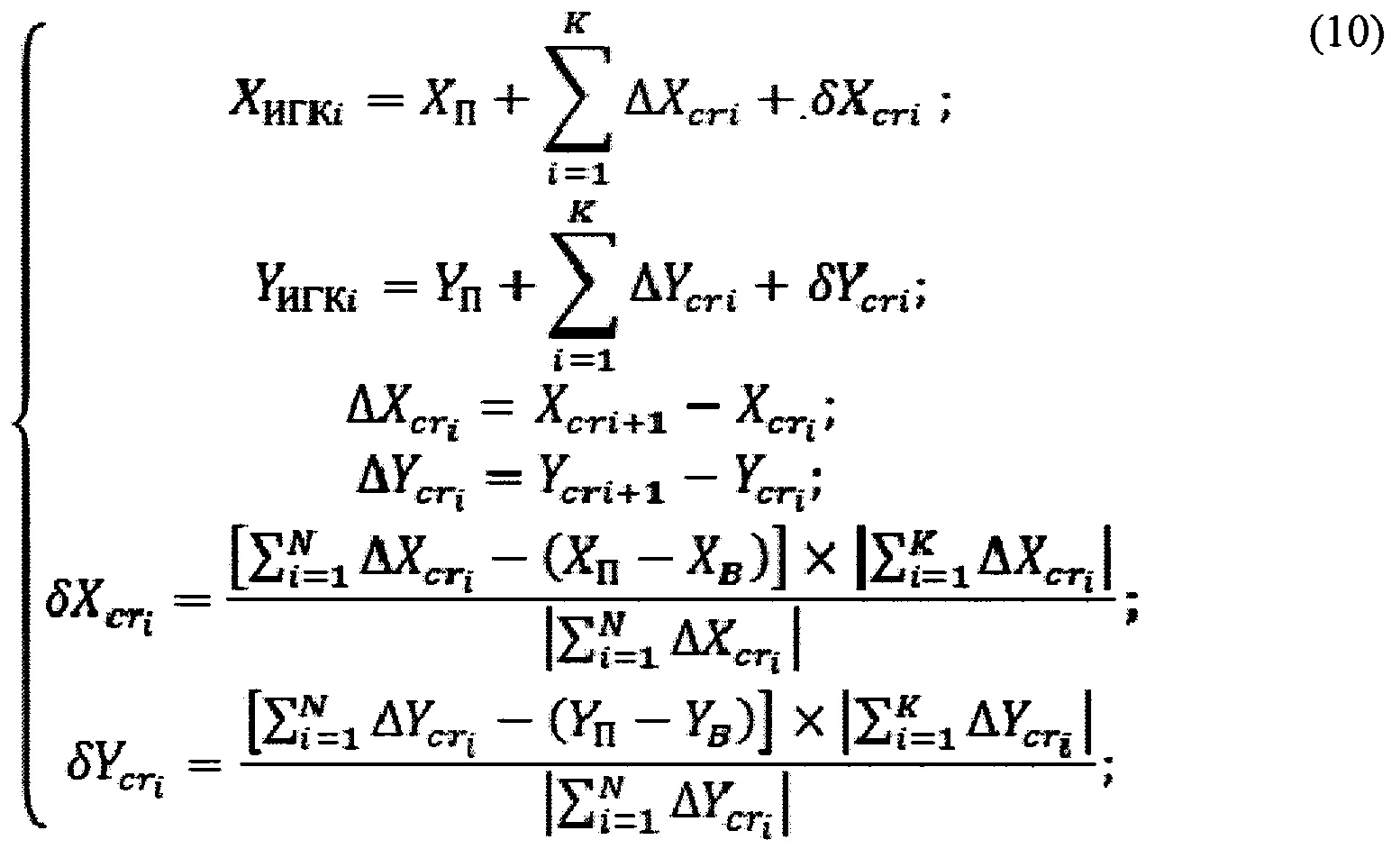
где i=1, 2, 3…K…N;
K и N - количество приращений  ,
,  ,
,  определенных от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды акватории соответственно;
определенных от поверхности воды акватории до заданного горизонта тарирования и всплытия до поверхности воды акватории соответственно;
 ,
,  ,
,  - поправки к искомым глубинам
- поправки к искомым глубинам  и к искомым геодезическим координатам
и к искомым геодезическим координатам  ,
,  соответственно, в случае образования невязок
соответственно, в случае образования невязок
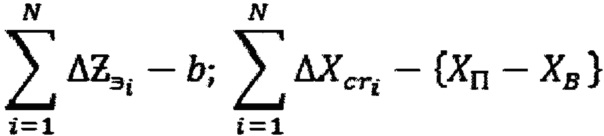 ;
;
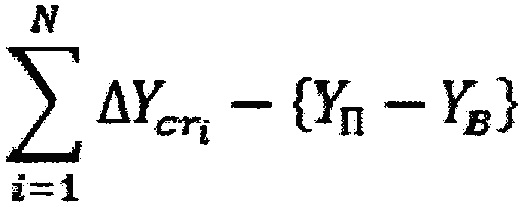 ,
,
при достижении верхним концом базы «b» поверхности воды акватории, а в устройстве для осуществления заявленного способа, содержащем базу, известной длины, закрепленную по вертикали на стабилизированной в горизонте платформе, например, в кардановом подвесе, положительную плавучесть, выполненную, например, в виде герметической емкости, закрепленной в верхней части базы, и отрицательную плавучесть, выполненную, например, в виде металлического груза, закрепленного в нижней части базы, приемоизлучающую гидроакустическую антенну однолучевого эхолота, закрепленную на нижнем конце базы с возможностью излучения гидроакустических сигналов по вертикали вверх до поверхности воды, и приема отраженных поверхностью воды данных сигналов, блок управления, передатчик и измерительный приемный блок, выход передатчика соединен через блок управления с входом приемоизлучающей гидроакустической антенны, выход которой соединен через блок управления с входом измерительного приемного блока, реле, воспринимающие и исполняющие контакты которого закреплены на верхнем конце базы, соединенное с блоком управления, вычислительный блок определения поправок к глубинам, измеренным эхолотом, регистратор, при этом вход вычислительного блока определения поправок к глубинам, измеренным эхолотом, соединен через блок управления с выходом измерительного приемного блока, а выход с входом регистратора.
Известное устройство снабжено вычислительным блоком определения искомых глубин  , реализующим соответствующие формульные зависимости (10), вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом блока определения поправок к глубинам
, реализующим соответствующие формульные зависимости (10), вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом блока определения поправок к глубинам  , измеренным эхолотом, приемником спутниковой радионавигационной системы типа GPS или «Глонасс», антенна которого закреплена на верхнем конце базы, морской интегрированной малогабаритной навигационной системой типа «Кама», закрепленной в кардановом подвесе, вычислительным блоком определения истинных геодезических координат мест измерения глубин , заявленным устройством
, измеренным эхолотом, приемником спутниковой радионавигационной системы типа GPS или «Глонасс», антенна которого закреплена на верхнем конце базы, морской интегрированной малогабаритной навигационной системой типа «Кама», закрепленной в кардановом подвесе, вычислительным блоком определения истинных геодезических координат мест измерения глубин , заявленным устройством  ,
,  , реализующим формульные зависимости, изложенный в пункте 1 формулы изобретения, вход которого соединен через блок управления с выходом приемника спутниковой радионавигационной системы и морской интегрированной малогабаритной навигационной системой, а выход с входом регистратора.
, реализующим формульные зависимости, изложенный в пункте 1 формулы изобретения, вход которого соединен через блок управления с выходом приемника спутниковой радионавигационной системы и морской интегрированной малогабаритной навигационной системой, а выход с входом регистратора.
Погружаемая забортная часть заявленного устройства включает: вертикальную базу, закрепленную в кардановом подвесе, положительную плавучесть, например, в виде полой герметичной емкости, закрепленной в верхней части базы и отрицательную плавучесть, например, в виде металлического груза, закрепленного в нижней части базы, приемоизлучающую гидроакустическую антенну, закрепленную на нижнем конце базы, с возможностью излучения гидроакустического сигнала по вертикали вверх до поверхности воды и приема отраженного поверхностью воды сигнала. На верхнем конце базы закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления, размещаемого на судне.
Устройство также снабжено приемником спутниковой радионавигационной системы типа GPS или «ГЛОНАСС», антенна которого закреплена на верхнем конце базы, морской интегрированной малогабаритной навигационной системой, закрепленной в кардановом подвесе, вычислительным блоком определения истинных геодезических координат мест измерения глубин заявленным устройством, вход которого соединен через блок управления с выходом приемника спутниковой радионавигационной системы и морской интегрированной малогабаритной навигационной системой, а выход с входом регистратора, размещаемого на судне.
Погружаемая заборная часть известного устройства за кардановый подвес присоединена к кабель-тросу судового спускоподъемного устройства.
Судовой эхолот, блок управления, передатчик, регистратор, вычислительный блок определения поправок к глубинам измеренных эхолотом, вычислительный блок определения истинных геодезических координат мест измерения глубин погружения нижнего конца базы являются составными частями заявленного устройства и размещаются на судне.
Передатчик, измерительный приемный блок являются составными частями тарирующего судового эхолота, при этом выход передатчика соединен через блок управления с входом приемоизлучающей гидроакустической антенны, выход которой соединен с входом измерительного приемного блока.
Вычислительный блок определения поправок к глубинам, измеренным эхолотом, регистратор, вход вычислительного блока соединен через блок управления с выходом измерительного приемного блока, а выход с входом регистратора с вычислительным блоком определения искомых глубин  , регистрирующие зависимости (10), вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом вычислительного блока определения поправок к глубинам
, регистрирующие зависимости (10), вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом вычислительного блока определения поправок к глубинам  , измеренным эхолотом.
, измеренным эхолотом.
Приемоизлучающая гидроакустическая антенна реализована на основе композитных материалов, используемых для создания приемоизлучающих гидроакустических антенн современных эхолотов.
Блок управления реализован на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразования сигналов от нескольких датчиков, например, микропроцессоров семейства AVR фирмы АТМЕС. Вычислительный блок определения поправок и вычислительный блок могут быть реализованы, например, на основе ЭВМ PC/AT фирмы IBM со специальным программным обеспечением.
Реализация известного способа определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, заявленным устройством осуществляется следующим образом.
Перед съемкой рельефа дна на акватории выбирают места для выполнения тарирования эхолота, в которых судно устанавливают на якорь или оставляют в дрейфе.
Заборная часть известного устройства с помощью судового спускоподъемного устройства на кабель-тросе спускают за борт в воду. Вследствие размещения базы в кардановом подвесе сначала под действием тяжести, а при погружении в воду всей заборной части момента сил (подъемной силы и силы тяжести) база примет вертикальное положение и будет сохранять его с достаточной точностью во время погружения до максимального горизонта тарирования и до поверхности дна и подъема до поверхности воды.
При погружении заборной части заявляемого устройства в воду момент соприкосновения с водой фиксируют воспринимающие контакты реле на верхнем конце базы, а исполнительные контакты реле замыкают в блоке управления электрические цепи формирования управляющих импульсов запуска передатчика, приемоизлучающая гидроакустическая антенна начинает излучение гидроакустических сигналов вертикально вверх до поверхности воды акватории и прем отраженных от поверхности воды акватории сигналов на нижнем конце базы, а также преобразование их в электрические сигналы, поступающие на вход измерительного приемного блока, в котором вырабатываются сигналы, соответствующие глубине погружения заборной части заявляемого устройства и их преобразования в цифровой код, после чего преобразованные сигналы по команде блока управления поступают в вычислительный блок определения поправок к глубинам, измеренным эхолотом, и в вычислительный блок определения искомых глубин . Вычисленные искомые глубины поступают на вход вычислительного блока. Вычисление данных поправок производится по алгоритму, составленному по соответствующим формулам (10).
В моменты погружения и всплытия воспринимающих контактов реле, расположенных на верхнем конце базы, по командным импульсам, выработанным блоком управления, электрические сигналы, пропорциональные геодезическим координатам места погружения Хп, Yп и всплытия Хв, Yв, измеренные приемником спутниковой радионавигационной системы, а также в течение всего времени погружения и всплытия заборной части заявляемого устройства по командным импульсом, выработанным блоком управления, электрические сигналы, пропорциональные счислимым геодезическим координатам  ,
,  , поступают на вход вычислительного блока определения истинных геодезических координат мест измерения глубин погружения устройства.
, поступают на вход вычислительного блока определения истинных геодезических координат мест измерения глубин погружения устройства.
Вычисление данных истинных геодезических координат  ,
,  производится в вычислительном блоке по алгоритму, составленному соответствующим формулам (11).
производится в вычислительном блоке по алгоритму, составленному соответствующим формулам (11).
Вычисленные значения поправок ΔZиэ к глубинам, измеренным эхолотом при съемке рельефа дна акватории, истинные значения глубин  координат
координат  ,
,  мест измерения глубины погружения заявленным устройством в машинном коде поступают в регистратор.
мест измерения глубины погружения заявленным устройством в машинном коде поступают в регистратор.
Работа заявленного устройства в режиме измерений глубины его погружения продолжается вплоть до момента, когда верхний конец базы достигнет поверхности воды, где при его выходе из воды происходит размыкание контактов реле и размыкание цепей передатчика, и прекращение излучения и приема гидроакустических сигналов.
Тактико-экономическая эффективность известных способа и устройства определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, заключается в том, что при их использовании значительно упрощается процесс определения данных поправок за счет того, что отсутствует необходимость в применение двух датчиков гидростатического давления и двух датчиков температуры воды для определения поправок  , а, следовательно, отсутствует необходимость в калибровки данных датчиков с целью определения деления измерительных шкал и определения ухода нуля их отсчета. Для чего необходимо на съемочном судне иметь метрологическую лабораторию со специальной метрологической аппаратурой.
, а, следовательно, отсутствует необходимость в калибровки данных датчиков с целью определения деления измерительных шкал и определения ухода нуля их отсчета. Для чего необходимо на съемочном судне иметь метрологическую лабораторию со специальной метрологической аппаратурой.
Отсутствует необходимость в обеспечении синхронного измерения данных датчиков. Для чего необходимо иметь четырехканальный измерительный блок со специальным блоком управления.
В известном способе и устройстве для его осуществления [9] заявлен технический результат, заключающийся «в расширение функциональных возможностей, путем обеспечения определения геодезических координат мест измерения приемоизлучающей антенны в процессе определения данных поправок, а, следовательно, обеспечивается возможность создания рельефа дна опорных гидрографических пунктов для калибровки эхолотов с целью обеспечения единства измерений», что носит декларативный характер, так как не понятно, каким образом может быть «создан рельеф для гидрографических пунктов».
Существенным недостатком известного технического решения [9], является то, что антенна приемника спутниковой радионавигационной системы, установленная на погружаемой базе, при погружении базы будет находиться в толще воды в не рабочем состоянии и определение геодезических координат мест измерения приемоизлучающей антенны практически исключается, что не позволяет реализовать заявленный отличительный признак изобретения, заключающийся в том, что «определяются точные счислимые геодезические координаты  ,
,  мест нахождения приемоизлучающей антенны в течение времени погружения ее до заданного горизонта или до дна и всплытия до поверхности воды верхнего конца базы» [9], также как и достичь технического результата, который заключается «в упрощение процесса определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории и расширения функциональных возможностей путем обеспечения определения геодезических координат глубины погружения приемоизлучающей антенны эхолота в процессе определения данных поправок, а следовательно, обеспечения создания на акватории съемки рельефа дна опорных гидрографических пунктов для калибровки эхолота на акватории съемки с целью обеспечения единства измерений».
мест нахождения приемоизлучающей антенны в течение времени погружения ее до заданного горизонта или до дна и всплытия до поверхности воды верхнего конца базы» [9], также как и достичь технического результата, который заключается «в упрощение процесса определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории и расширения функциональных возможностей путем обеспечения определения геодезических координат глубины погружения приемоизлучающей антенны эхолота в процессе определения данных поправок, а следовательно, обеспечения создания на акватории съемки рельефа дна опорных гидрографических пунктов для калибровки эхолота на акватории съемки с целью обеспечения единства измерений».
Кроме того, размещение на погружаемой базе антенны приемника спутниковой радионавигационной системы, морской интегрированной малогабаритной навигационной системы, приемоизлучающей гидроакустической антенны, и удерживаемой, посредством кабель-троса на глубинах до 100 м, при нахождении судна на якоре или в дрейфе существенно сужает диапазон выполняемых измерений по глубине, за счет неустойчивости такой конструкции.
Задачей предлагаемого технического решения является повышение точности результатов тарировки навигационных эхолотов надводных судов и подводных объектов и снижение трудозатрат на ее проведение.
Поставленная задача решается за счет того, что в способе определения поправок к глубинам, измеренным однолучевым эхолотом при съемке рельефа дна акватории, включающим погружение до заданного горизонта, а затем подъем до поверхности воды приемоизлучающей гидроакустической антенны однолучевого эхолота, расположенной на базе известной длины, с возможностью погружения и подъема данной антенны по вертикали, при этом осуществляется излучение по вертикали гидроакустических сигналов до поверхности воды и прием отраженных сигналов от поверхности воды указанной антенной, измерение глубины погружения антенны  и определение истинной глубины
и определение истинной глубины  , определение искомых поправок
, определение искомых поправок  к глубинам, измеренных однолучевым эхолотом при съемке рельефа дна, расчетным путем и их регистрация, в котором, в момент погружения и подъема базы фиксируют глубину погружения
к глубинам, измеренных однолучевым эхолотом при съемке рельефа дна, расчетным путем и их регистрация, в котором, в момент погружения и подъема базы фиксируют глубину погружения  приемоизлучающей гидроакустической антенны, длину базы принимают за истинную опорную глубину, определяют геодезические координаты мест погружения Хп, Yп и подъема Хв, Yв базы, точные геодезические координаты
приемоизлучающей гидроакустической антенны, длину базы принимают за истинную опорную глубину, определяют геодезические координаты мест погружения Хп, Yп и подъема Хв, Yв базы, точные геодезические координаты  ,
,  мест нахождения антенны в течение времени погружения ее до заданного горизонта или до дна и поднятия базы и по полученным данным определяют искомые поправки
мест нахождения антенны в течение времени погружения ее до заданного горизонта или до дна и поднятия базы и по полученным данным определяют искомые поправки  к глубинам
к глубинам  , и искомые геодезические координаты
, и искомые геодезические координаты  ,
,  мест нахождения данной антенны по следующим формульным зависимостям:
мест нахождения данной антенны по следующим формульным зависимостям:
 ;
;
 , при i=1;
, при i=1;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
где i=1, 2, 3, …K…N;
K и N - количество приращений  ,
,  ,
,  определенных от исходного положения базы до заданного горизонта тарирования и до поверхности воды акватории соответственно;
определенных от исходного положения базы до заданного горизонта тарирования и до поверхности воды акватории соответственно;
 ,
,  ,
,  - поправки к искомым глубинам
- поправки к искомым глубинам  и искомым геодезическим координатам
и искомым геодезическим координатам  ,
,  соответственно, в случае образования невязок
соответственно, в случае образования невязок
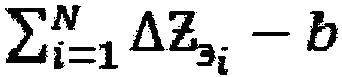 ;
;  ;
; 
при поднятии базы в исходное положение, отличающийся тем, что база перемещается посредством телескопического устройства в автоматическом режиме по управляющим сигналам с судна и фиксируется в заранее установленных точках, заданного горизонта тарирования, измерение глубины погружения антенны  выполняют дистанционным путем с учетом осадки судна, а устройство для осуществления способа по пункту 1, содержащее базу с известной длиной, приемоизлучающую гидроакустическую антенну однолучевого эхолота, закрепленную на базе с возможностью излучения акустических сигналов по вертикали вверх до поверхности воды и приема отраженных поверхностью воды данных сигналов, блок управления, передатчик и измерительный приемный блок, выход передатчика соединен через блок управления с входом приемоизлучающей гидроакустической антенны, выход которой соединен через блок управления с входом измерительного приемного блока; вычислительный блок определения поправок к глубинам, измеренным эхолотом, регистратор, при этом вход вычислительного блока определения поправок к глубинам, измеренным эхолотом, соединен через блок управления с выходом измерительного приемного блока, а выход с входом регистратора, вычислительный блок определения искомых глубин
выполняют дистанционным путем с учетом осадки судна, а устройство для осуществления способа по пункту 1, содержащее базу с известной длиной, приемоизлучающую гидроакустическую антенну однолучевого эхолота, закрепленную на базе с возможностью излучения акустических сигналов по вертикали вверх до поверхности воды и приема отраженных поверхностью воды данных сигналов, блок управления, передатчик и измерительный приемный блок, выход передатчика соединен через блок управления с входом приемоизлучающей гидроакустической антенны, выход которой соединен через блок управления с входом измерительного приемного блока; вычислительный блок определения поправок к глубинам, измеренным эхолотом, регистратор, при этом вход вычислительного блока определения поправок к глубинам, измеренным эхолотом, соединен через блок управления с выходом измерительного приемного блока, а выход с входом регистратора, вычислительный блок определения искомых глубин  погружения приемоизлучающей акустической антенны, реализующим формульные зависимости, изложенные в пункте 1 формулы изобретения, вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом блока определения поправок к глубинам, измерительным эхолотом, приемником спутниковой радионавигационной системы, вычислительным блоком определения искомых геодезических координат мест нахождения приемоизлучателей акустической системы, реализующей формульные зависимости, изложенные в пункте 1 формулы изобретения, вход которого соединен с блоком управления, а выход с входом регистратора, отличающееся тем, что база выполнена в виде поворотной рамы, внутри которой закреплена приемоизлучающая гидроакустическая антенна, рама сочленена с поворотным механизмом, сочлененным с телескопическим устройством, сочлененным с судовым подъемно-спусковым механизмом, блок управления соединен с судовым гидролокатором бокового обзора.
погружения приемоизлучающей акустической антенны, реализующим формульные зависимости, изложенные в пункте 1 формулы изобретения, вход которого через блок управления соединен с выходом измерительного приемного блока, а выход с входом блока определения поправок к глубинам, измерительным эхолотом, приемником спутниковой радионавигационной системы, вычислительным блоком определения искомых геодезических координат мест нахождения приемоизлучателей акустической системы, реализующей формульные зависимости, изложенные в пункте 1 формулы изобретения, вход которого соединен с блоком управления, а выход с входом регистратора, отличающееся тем, что база выполнена в виде поворотной рамы, внутри которой закреплена приемоизлучающая гидроакустическая антенна, рама сочленена с поворотным механизмом, сочлененным с телескопическим устройством, сочлененным с судовым подъемно-спусковым механизмом, блок управления соединен с судовым гидролокатором бокового обзора.
В отличие от прототипа [9], база выполнена в виде поворотной рамы, внутри которой закреплена приемоизлучающая гидроакустическая антенна, рама сочленена с поворотным механизмом, сочлененным с телескопическим устройством, сочлененным с судовым подъемно-спусковым механизмом, блок управления соединен с судовым гидролокатором бокового обзора, что позволяет базе перемещается в автоматическом режиме по управляющим сигналам с судна. При этом база фиксируется в заранее установленных точках, заданного горизонта тарирования, посредством телескопического устройства, измерение глубины погружения антенны  выполняют дистанционным путем,
выполняют дистанционным путем,
Способ осуществляется следующим образом.
Посредством судового гидролокатора бокового обзора зондируют дно, по результатам которого на дне выбирают ровную площадку. В качестве судового гидролокатора может быть использован модуль типа «Сарган-ЭМ», работающий на частотах 19.7 и 135 кГц или гидролокаторы типа «C3D-SPB» или типа «C3D-LPM». Судно над данной площадкой становится на якорь. Посредством телескопического устройства сочлененным с судовым подъемно-спусковым механизмом, база выполненная в виде поворотной рамы, внутри которой закреплена приемоизлучающая гидроакустическая антенна, а рама сочленена с поворотным механизмом, сочлененным с телескопическим устройством опускается в автоматическом режиме по управляющим сигналам с судна и фиксируется в заранее установленных точках, заданного горизонта тарирования. При этом измерение глубины погружения антенны выполняют дистанционным путем. По команде с блока управления приемоизлучающая гидроакустическая антенна, установленная в поворотной рамке начинает излучение гидроакустических сигналов вертикально вверх до поверхности воды акватории и прем отраженных от поверхности воды акватории сигналов, а также преобразование их в электрические сигналы, поступающие на вход измерительного приемного блока, в котором вырабатываются сигналы, соответствующие глубине  погружения заборной части заявляемого устройства и их преобразования в цифровой код, после чего преобразованные сигналы по команде блока управления поступают в вычислительный блок определения поправок к глубинам, измеренным эхолотом, и в вычислительный блок определения искомых глубин
погружения заборной части заявляемого устройства и их преобразования в цифровой код, после чего преобразованные сигналы по команде блока управления поступают в вычислительный блок определения поправок к глубинам, измеренным эхолотом, и в вычислительный блок определения искомых глубин  . Вычисленные искомые глубины поступают на вход вычислительного блока. Вычисление данных поправок производится по алгоритму, составленному по соответствующим формулам (10).
. Вычисленные искомые глубины поступают на вход вычислительного блока. Вычисление данных поправок производится по алгоритму, составленному по соответствующим формулам (10).
По завершению данного этапа измерений, приемоизлучающая гидроакустическая антенна, установленная в поворотной рамке, посредством поворотного устройства разворачивается на 180 градусов и начинает излучение гидроакустических сигналов вертикально вниз до дна акватории и прем отраженных от дна акватории сигналов, а также преобразование их в электрические сигналы, поступающие на вход измерительного приемного блока, в котором вырабатываются сигналы, соответствующие глубине между приемоизлучающей гидроакустической антенной и дном, и их преобразования в цифровой код, после чего преобразованные сигналы по команде блока управления поступают в вычислительный блок определения поправок к глубинам, измеренным эхолотом, и в вычислительный блок определения искомых глубин . Вычисленные искомые глубины поступают на вход вычислительного блока. Вычисление данных поправок производится по алгоритму, составленному по соответствующим формулам (10).
В моменты погружения и всплытия воспринимающих контактов реле, расположенных на верхнем конце базы, по командным импульсам, выработанным блоком управления, электрические сигналы, пропорциональные геодезическим координатам места погружения Хп, Yп и всплытия Хв, Yв, измеренные приемником спутниковой радионавигационной системы, а также в течение всего времени погружения и всплытия заборной части заявляемого устройства по командным импульсом, выработанным блоком управления, электрические сигналы, пропорциональные измеренным геодезическим координатам  ,
,  поступают на вход вычислительного блока определения истинных геодезических координат мест измерения глубин погружения устройства.
поступают на вход вычислительного блока определения истинных геодезических координат мест измерения глубин погружения устройства.
Вычисление данных истинных геодезических координат  ,
,  производится в вычислительном блоке по алгоритму, составленному соответствующим формулам (11).
производится в вычислительном блоке по алгоритму, составленному соответствующим формулам (11).
Вычисленные значения поправок ΔZиз к глубинам, измеренным эхолотом при съемке рельефа дна акватории, истинные значения глубин  координат
координат  ,
,  мест измерения глубины погружения заявленным устройством в машинном коде поступают в регистратор.
мест измерения глубины погружения заявленным устройством в машинном коде поступают в регистратор.
При реализации предлагаемого технического решения могут быть использованы стандартное оборудование и приспособления, используемые для изготовления морских приборов и технических средств.
Технико-экономическая эффективность заявленного способа и устройства заключается в снижении трудоемкости определения поправок к глубинам, измеренных однолучевым эхолотом по измеряемому диапазону глубин, за счет отсутствия необходимости использования сложной и не устойчивой конструкции базы аналогов и прототипа.
Источники информации.
1. «Инструкция по промеру». - Л: издание Управления гидрографической службы ВМФ, 1964 г., - cc. 109-111.
2. Product Survey on Single Beam Echosounders. // Hydro INTERNATIONAL. - 2001. - September. - p. 44-51 [2]).
3. Авторское свидетельство SU №913814, 16.11.1981.
4. Ушаков Д.Н. Толковый словарь русского языка. T. IV. Изд. Стандартов. 1985 - 256 с.
5. Бурдун Г.Д., Марков Б.Н. Основы метрологии. М.: изд. Стандартов, 1985 - 256 с.
6. Федоров И.И. Эхолоты и другие гидроакустические средства. Курс кораблевождения. Т. 5. книга 4. Л.: Управление начальника гидрографической службы ВМФ, 1960, - 368 с.
7. Судовые эхолоты / Хребтов А.А. и др. Л.: Судостроение. 1982, с. 178-179.
8. Патент RU №№2292062, 20.01.2007.
9. Заявка RU №2015145074/28(069390) от 20.10.2015.
10. Ole Orpen, (Fugro Seastar) ocuol Strin Asheim, (Fugro Suzvoy) Hyolro International v. 6, №10, 2002, - p. 30-33.
11. IHO Standards for Hydrographis Surveys // Special Publication, - 1997, - №44, - 23 p.


























Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью

