Результат интеллектуальной деятельности: СПОСОБ РАЗГРУЗКИ УПРАВЛЯЮЩИХ ДВИГАТЕЛЕЙ-МАХОВИКОВ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано на любых космических аппаратах для разгрузки управляющих двигателей-маховиков (УДМ).
Известен способ разгрузки управляющих двигателей-маховиков космического аппарата, работающих в двухконтурной системе, где первый контур осуществляет необходимую ориентацию и накапливает импульс внешнего возмущающего момента, действующего на космический аппарат (КА), а второй контур, способный создавать внешние управляющие моменты, работает по следующему принципу. Как только величина кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации становится больше заданной величины, вторым контуром формируется момент разгрузки, который уменьшает величину кинетического момента управляющего двигателя-маховика, работающего в первом контуре. [Управление ориентацией космических аппаратов: Б.В. Раушенбах, Е.Н. Токарь; Наука. - Москва, 1974. с. 125-127].
Для большинства космических аппаратов наибольший вклад в возмущающий момент, действующий на КА, вносит работа двигателей системы коррекции. Возмущающий момент от двигателей системы коррекции обусловлен погрешностью установки двигателя коррекции, а также уходом центра масс космического аппарата от номинального положения из-за выработки рабочего тела, изменения геометрии космического аппарата. Также возмущающий момент от двигателей системы коррекции зависит от расстояния между центром масс космического аппарата и двигателем коррекции.
Возмущающий момент от работы двигателей коррекции может превышать в несколько раз управляющий момент двигателя-маховика, который должен парировать возмущающий момент. При этом отслеживание ориентира будет осуществляться с большой погрешностью или не будет осуществляться вовсе. Применение же УДМ с управляющим моментом, превышающим возмущающий момент от работы двигателей коррекции, является не целесообразным, так как приводит к увеличению массы и энергопотребления КА. Поэтому для парирования влияния возмущающего момента, действующего на КА, необходимо формировать момент разгрузки реактивными двигателями, входящими в состав второго контура управления.
Основным недостатком способа разгрузки УДМ, описанного выше, является то, что момент разгрузки УДМ, создаваемый вторым контуром практически всегда превышает управляющий момент двигателя-маховика в несколько раз. Это приводит к увеличению погрешности ориентации. Уменьшение момента разгрузки УДМ за счет уменьшения плеч двигателей ориентации приводит к увеличению расхода рабочего тела.
Выход из сложившейся ситуации может быть следующим.
Время включения реактивного двигателя для разгрузки УДМ на каждом цикле управления может изменяться практически от нуля до максимальной величины, равной времени цикла управления ТЦ. Это позволяет создать на цикле управления импульс момента разгрузки, практически равный импульсу возмущающего момента с противоположным знаком, при условии, что возмущающий момент по модулю не превышает момент разгрузки.
При таком управлении суммарный возмущающий момент, действующий на космический аппарат, будет практически равен нулю, и погрешность ориентации космического аппарата на заданный ориентир будет минимальной.
Таким образом, можно утверждать следующее:
1. Формирование на каждом цикле управления импульса момента разгрузки, равного импульсу возмущающего момента с противоположным знаком, позволит эффективно парировать возмущающий момент, действующий на КА;
2. При таком способе разгрузки суммарный возмущающий момент, действующий на космический аппарат, будет практически равен нулю, и погрешность ориентации космического аппарата на заданный ориентир будет минимальной.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является способ разгрузки управляющих двигателей-маховиков космического аппарата, работающих в двухконтурной системе, где первый контур осуществляет необходимую ориентацию и накапливает импульс внешнего возмущающего момента, действующего на КА, а второй контур, способный создавать внешние управляющие моменты, работает по следующему принципу. Как только величина кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации становится больше заданной величины, вторым контуром формируется момент разгрузки, который уменьшает величину кинетического момента управляющего двигателя-маховика, работающего в первом контуре [Управление ориентацией космических аппаратов: Б.В. Раушенбах, Е.Н. Токарь; Наука. - Москва, 1974. с. 125-127].
Описанный способ принят за прототип изобретения.
Недостатки прототипа:
1. При возмущающем моменте, превышающем управляющий момент двигателя-маховика, отслеживание ориентира осуществляется с большой погрешностью или не осуществляется вовсе.
2. Момент разгрузки УДМ, создаваемый вторым контуром практически всегда превышает управляющий момент двигателя-маховика в несколько раз. Это приводит к увеличению погрешности ориентации.
Для уменьшения погрешности ориентации необходимо уменьшить момент разгрузки реактивного двигателя. Это можно сделать путем применения двигателя с малой тягой, однако при этом уменьшается величина возмущающего момента, которую может парировать реактивный двигатель. Также можно уменьшить момент разгрузки УДМ за счет уменьшения плеча реактивного двигателя, однако это приводит к увеличению расхода рабочего тела, что тоже является неприемлемым.
Исходя из вышесказанного целесообразно при достижении величины кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации заданной величины, на каждом цикле управления формировать импульс момента разгрузки, равный импульсу возмущающего момента с противоположным знаком. При этом суммарный возмущающий момент, действующий на космический аппарат, будет практически равен нулю, и погрешность ориентации космического аппарата на заданный ориентир будет минимальной.
В основу настоящего изобретения положена задача создания способа разгрузки управляющего двигателя-маховика, позволяющего:
- уменьшить погрешность ориентации космического аппарата на заданный ориентир во время разгрузки;
- увеличить диапазон допустимого возмущающего момента до величины момента разгрузки;
- обеспечить ориентацию на заданный ориентир в процессе разгрузки, в том числе и при возмущающем моменте, превышающем максимальный управляющий момент УДМ.
Поставленная задача решается следующим образом.
Заявлен способ разгрузки управляющих двигателей-маховиков космического аппарата, работающих в двухконтурной системе, где первый контур осуществляет необходимую ориентацию и накапливает импульс внешнего возмущающего момента, действующего на космический аппарат, а второй контур формирует момент разгрузки с использованием реактивных двигателей, противоположный по знаку суммарному
кинетическому моменту (DHi) системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации при величине суммарного кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации, превышающей заданное значение (DHOi) по модулю, отличающийся тем, что для парирования возмущающего момента на каждом цикле управления формируют импульс момента разгрузки с помощью реактивных двигателей, равный по абсолютной величине импульсу возмущающего момента и противоположный по знаку возмущающему моменту, при этом время τi включения реактивных двигателей на цикле управления для формирования момента разгрузки  по i-му каналу ориентации рассчитывают пропорциональным разности между DHi и заданным значением DHOi по закону:
по i-му каналу ориентации рассчитывают пропорциональным разности между DHi и заданным значением DHOi по закону:

где T1 - константа, при этом кинетический момент системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации стабилизируется на величине, при которой импульс момента разгрузки по модулю за цикл управления равен импульсу возмущающего момента по модулю за цикл управления и противоположен по знаку возмущающему моменту.
Сущность изобретения.
Первый контур управления, включающий в себя управляющие двигатели-маховики, осуществляет ориентацию КА. При воздействии на КА внешних возмущающих моментов УДМ формирует управляющий момент, который парирует внешний возмущающий момент, и накапливают импульс внешнего возмущающего момента. По достижении заданного порогового значения суммарного кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации включаются реактивные двигатели (второй контур управления), с помощью которых на каждом цикле управления формируется импульс момента разгрузки, равный по абсолютной величине импульсу возмущающего момента и противоположный по знаку возмущающему моменту, что приводит к стабилизации кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации.
При таком управлении работой реактивных двигателей формируются две системы управления, работающие одновременно:
- система управления ориентацией на заданный ориентир с использованием двигателей-маховиков;
- система управления парированием внешнего возмущающего момента с использованием реактивных двигателей.
Система управления парированием внешнего возмущающего момента использует для формирования управляющего момента (момента разгрузки) информацию о суммарном кинетическом моменте системы космический аппарат - управляющий двигатель-маховик по каждому из каналов ориентации. А именно по информации о суммарном кинетическом моменте системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации на каждом цикле управления формируют время включения реактивных двигателей по следующему закону:

где
i=X, Y, Z;
DHi - суммарный кинетический момент системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации;
DHOi - заданное значение суммарного кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации;
T1 - константа.
Знак момента разгрузки УДМ определяется следующим образом:

Величина стабилизации кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации, при которой импульс момента разгрузки по модулю за цикл управления равен импульсу возмущающего момента по модулю за цикл управления и противоположен по знаку возмущающему моменту  , зависит от возмущающего момента, действующего на КА, и определяется следующим образом:
, зависит от возмущающего момента, действующего на КА, и определяется следующим образом:


Поскольку знак кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации зависит от знака возмущающего момента по i-му каналу ориентации и не зависит от знака момента разгрузки по i-му каналу ориентации, получим:

где
i=X, Y, Z;
DHi - суммарный кинетический момент системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации;
 - возмущающий момент по i-му каналу ориентации;
- возмущающий момент по i-му каналу ориентации;
ТЦ - время цикла управления;
T1 - константа;
 - момент разгрузки УДМ по i-му каналу ориентации;
- момент разгрузки УДМ по i-му каналу ориентации;
DHOi - заданное значение суммарного кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации.
Максимальное значение величины стабилизации кинетического момента системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации, вычисленное с помощью выражения (5), равно:
DHiMAX=8.5 Нмс, при  , ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
, ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
Величина стабилизации кинетического момента системы космический аппарат -управляющий двигатель-маховик по i-му каналу ориентации при изменении возмущающего момента, вычисленная с помощью выражения (5), равна:
DHi=2.38 Нмс, при 
 ТЦ = 4 с, Т1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
ТЦ = 4 с, Т1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
DHi=4.26 Нмс, при 
 ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
DHi = 6.15 Нмс, при 
 ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
DHi = 8.03 Нмс, при 
 ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
ТЦ = 4 с, T1 = 0,5 1/Нм, DHOi = 0,5 Нмс.
Так как при работе реактивного двигателя давление в топливном баке понижается, это приводит к тому, что при выдаче импульса коррекции возмущающий момент от реактивного двигателя коррекции может уменьшаться (зависит от схемы работы реактивного двигателя).
Предлагаемый алгоритм разгрузки УДМ подстраивается под изменения возмущающего момента путем формирования, на каждом цикле управления импульса момента разгрузки, равного импульсу возмущающего момента с противоположным знаком. При этом суммарный возмущающий момент, действующий на космический аппарат, будет практически равен нулю, и погрешность ориентации космического аппарата на заданный ориентир будет минимальной.
В настоящее время на большинстве космических аппаратов применяются реактивные двигатели, которые имеют минимальное время включения ТМИН. Если возмущающий момент мал, и время включения реактивного двигателя на цикле управления τi будет меньше, чем минимальное значения времени включения реактивного двигателя ТМИН, то разгрузка УДМ будет осуществляться не на каждом цикле управления,
а по достижению суммарным кинетическим моментом системы космический аппарат - управляющий двигатель-маховик по i-му каналу ориентации заданного значения DHOi. При этом время включения реактивного двигателя на цикле управления τi будет равно ТМИН. В этом случае момент разгрузки  практически не будет оказывать влияния на погрешность ориентации КА.
практически не будет оказывать влияния на погрешность ориентации КА.
Для подтверждения работоспособности предлагаемого алгоритма разгрузки проводилось моделирование переходных процессов по каналу ориентации.
Система уравнений, описывающих движение при моделировании, имеет вид:









где
JX - момент инерции космического аппарата по каналу ориентации;
ωX - угловая скорость космического аппарата по каналу ориентации;
 - возмущающий момент по каналу ориентации;
- возмущающий момент по каналу ориентации;
 - момент реактивного двигателя по каналу ориентации;
- момент реактивного двигателя по каналу ориентации;
НХ - значение кинетического момента УДМ по каналу ориентации;
 - производная кинетического момента УДМ по каналу ориентации;
- производная кинетического момента УДМ по каналу ориентации;
МУДМх - управляющий момент двигателя-маховика по каналу ориентации;
МСТ - момент сухого трения на валу двигателя-маховика;
KC - коэффициент зависимости сопротивления от величины Н;
tЦ - время цикла управления (4 с);
tX - длительность включения реактивного двигателя на цикле управления по каналу ориентации;
 - импульс возмущающего момента по каналу ориентации;
- импульс возмущающего момента по каналу ориентации;
 - импульс момента разгрузки по каналу ориентации.
- импульс момента разгрузки по каналу ориентации.
K1, K2 - коэффициенты закона управления по каналу ориентации;
y - значение угла по каналу ориентации;
y& - значение скорости по каналу ориентации;
DHx - суммарный кинетический момент системы космический аппарат - управляющий двигатель-маховик по каналу ориентации;
DHOx - заданное значение суммарного кинетического момента системы космический аппарат - управляющий двигатель-маховик по каналу ориентации;
T1 - константа;
PSI - управляющая координата по каналу ориентации.
Моделирование переходных процессов проводилось по одному каналу ориентации при нулевых начальных условиях, при следующих значениях констант: T1 = 0,5 1/Нм, DHOx = 0,5 Нмс, Jx = 6000 кг м2, MCT = 0,002 Нм,  , KC = 1,340-4 с-1, K1 = 12 Нм/рад, K2 = 400 Нмс/рад.
, KC = 1,340-4 с-1, K1 = 12 Нм/рад, K2 = 400 Нмс/рад.
Максимальный управляющий момент двигателя-маховика при моделировании принимался равным 0,2 Нм.
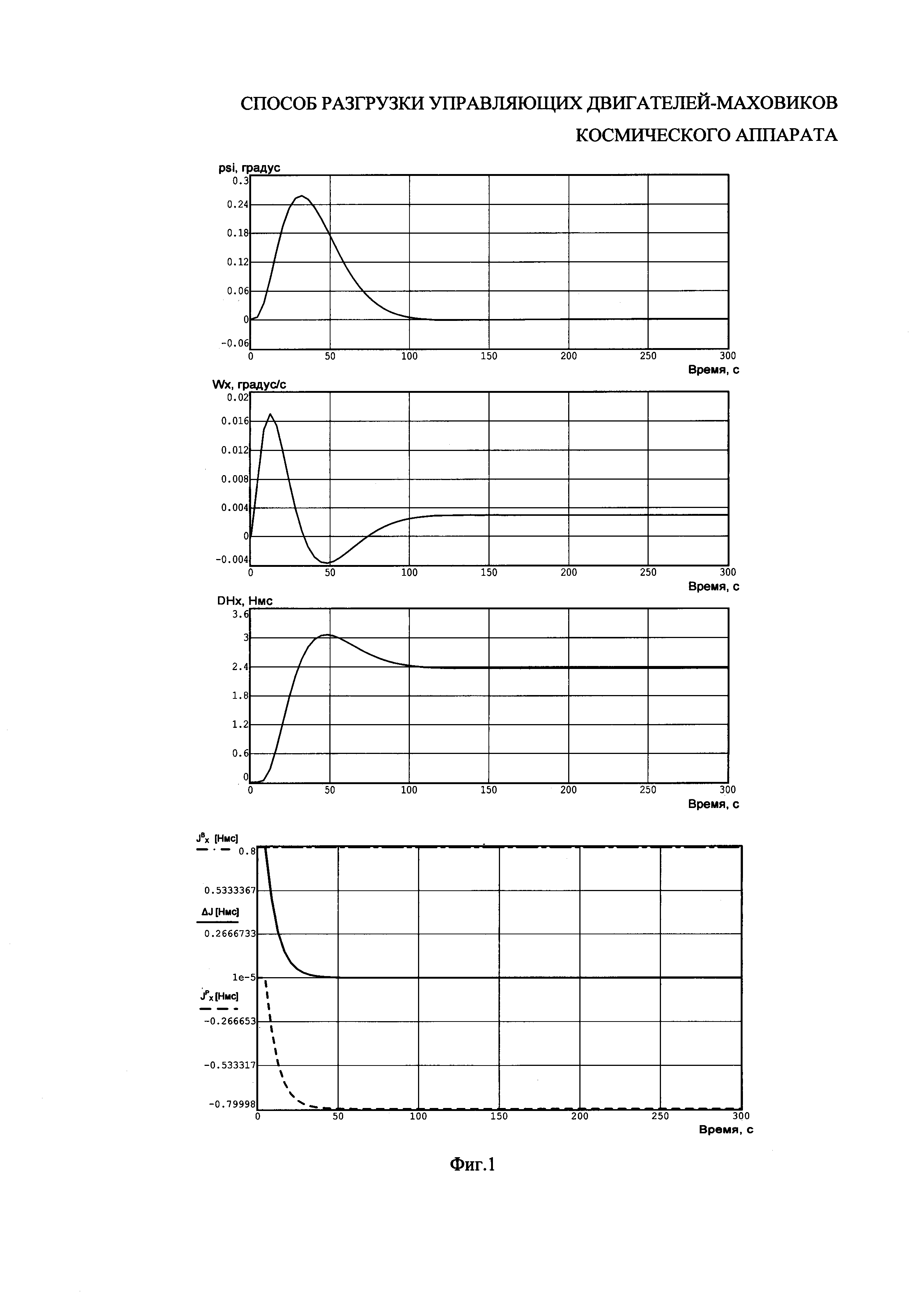
Результаты моделирования переходного процесса по каналу ориентации КА при значении возмущающего момента MB = 0,2 Нм приведены на фиг. 1,
где
PSI - управляющая координата по каналу ориентации;
Wx - скорость изменения управляющей координаты по каналу ориентации;
DHx - суммарный кинетический момент системы космический аппарата - управляющий двигатель-маховик по каналу ориентации;
 - импульс возмущающего момента по каналу ориентации;
- импульс возмущающего момента по каналу ориентации;
 - импульс момента разгрузки по каналу ориентации;
- импульс момента разгрузки по каналу ориентации;
ΔJ - разность между  и
и  .
.
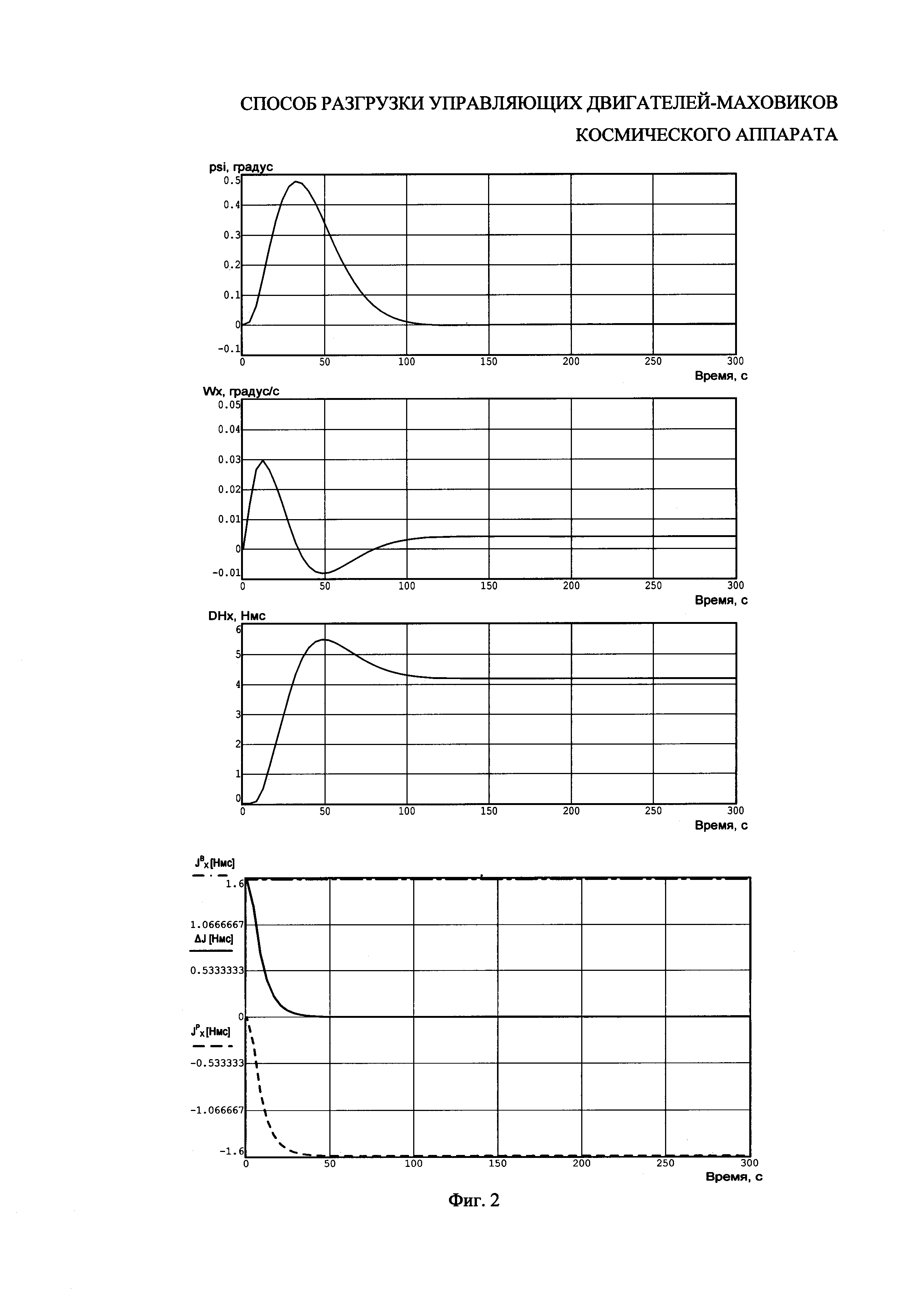
Результаты моделирования переходного процесса по каналу ориентации КА при значении возмущающего момента MB = 0,4 Нм приведены на фиг. 2,
где
PSI - управляющая координата по каналу ориентации;
Wx - скорость изменения управляющей координаты по каналу ориентации;
DHx - суммарный кинетический момент канала ориентации системы космический аппарата - управляющий двигатель-маховик;
 - импульс возмущающего момента по каналу ориентации;
- импульс возмущающего момента по каналу ориентации;
 - импульс момента разгрузки по каналу ориентации;
- импульс момента разгрузки по каналу ориентации;
ΔJ - разность между  и
и  .
.
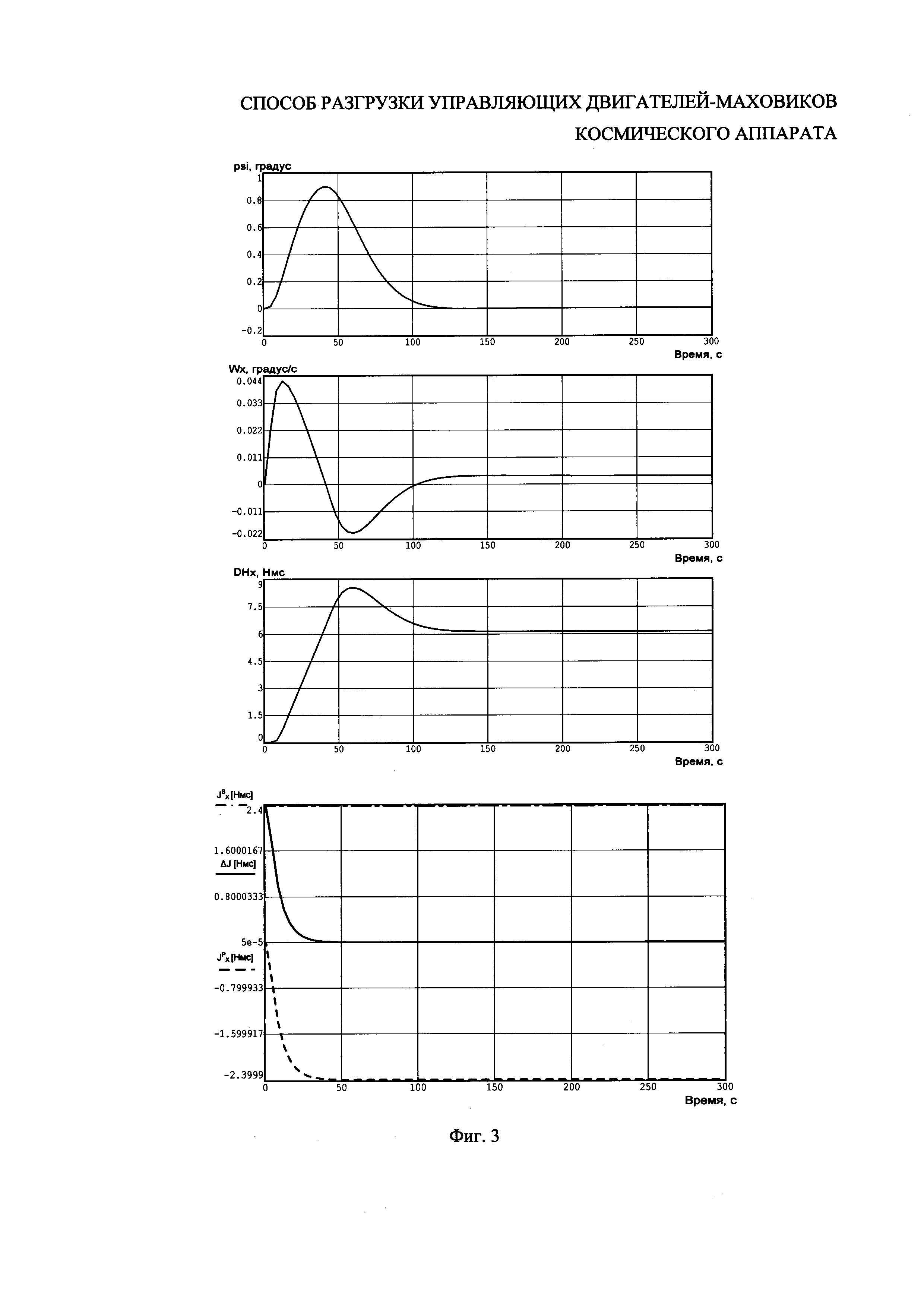
Результаты моделирования переходного процесса по каналу ориентации КА при значении возмущающего момента MB = 0,6 Нм приведены на фиг. 3,
где
PSI - управляющая координата по каналу ориентации;
Wx - скорость изменения управляющей координаты по каналу ориентации;
DHx - суммарный кинетический момент канала ориентации системы космический аппарата - управляющий двигатель-маховик;
 - импульс возмущающего момента по каналу ориентации;
- импульс возмущающего момента по каналу ориентации;
 - импульс момента разгрузки по каналу ориентации;
- импульс момента разгрузки по каналу ориентации;
ΔJ - разность между  и
и  .
.
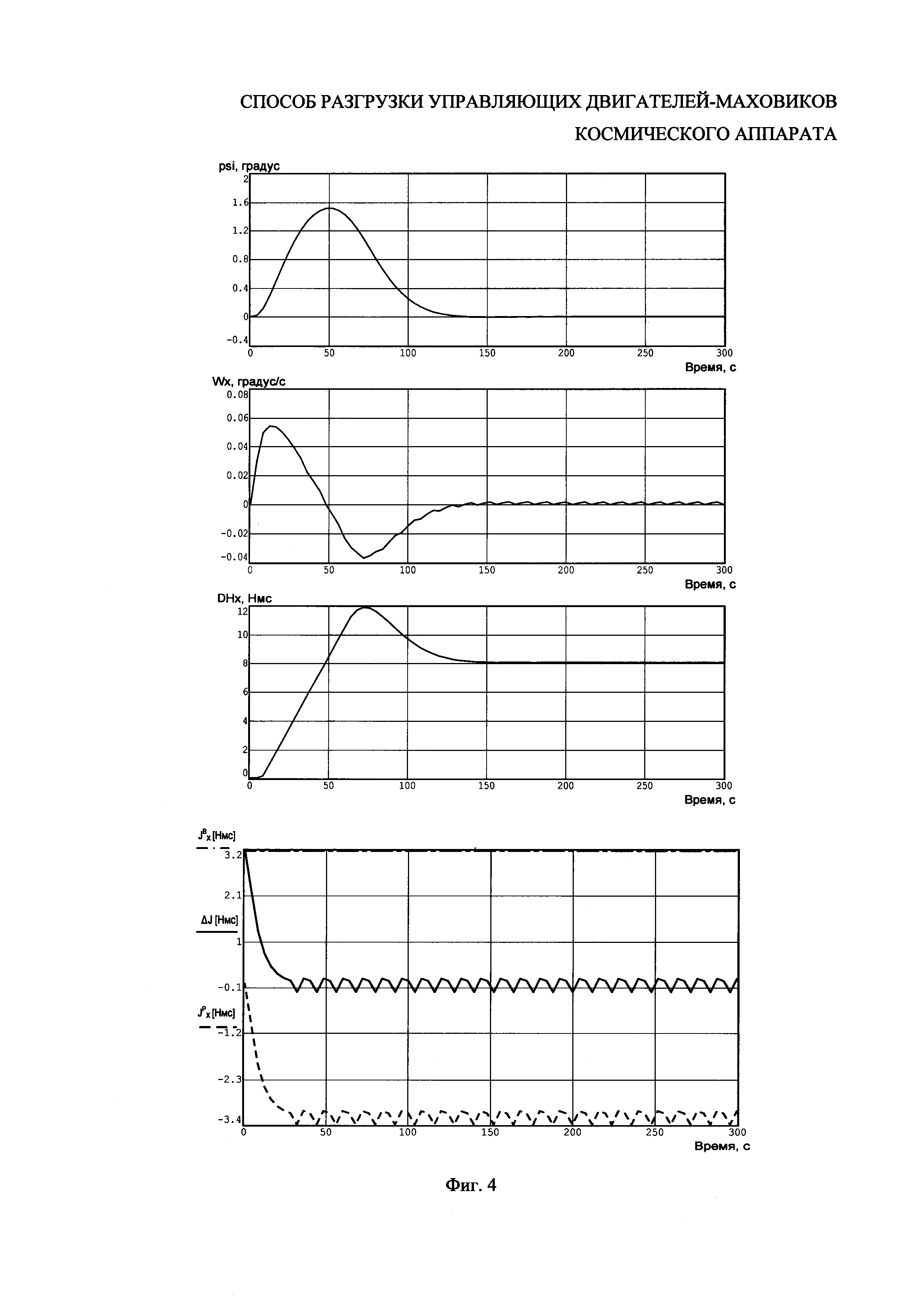
Результаты моделирования переходного процесса по каналу ориентации КА при значении возмущающего момента MB = 0,8 Нм приведены на фиг. 4,
где:
PSI - управляющая координата по каналу ориентации;
Wx - скорость изменения управляющей координаты по каналу ориентации;
DHx - суммарный кинетический момент канала ориентации системы космический аппарата - управляющий двигатель-маховик;
 - импульс возмущающего момента по каналу ориентации;
- импульс возмущающего момента по каналу ориентации;
 - импульс момента разгрузки по каналу ориентации;
- импульс момента разгрузки по каналу ориентации;
ΔJ - разность между  и
и  .
.
По результатам моделирования переходных процессов можно сделать следующие выводы:
1. Величина стабилизации суммарного кинетического момента i-го канала ориентации системы космический аппарат - управляющий двигатель-маховик на фиг. 1-4 равна величине стабилизации суммарного кинетического момента i-го канала ориентации системы космический аппарат - управляющий двигатель-маховик, полученной аналитически по формуле (5) на стр. 5.
2. Система остается работоспособной:
- при изменении возмущающего момента до величины, равной максимальному моменту, создаваемому реактивными двигателями;
- при величине возмущающего момента, превышающего максимальный управляющий момент двигателя-маховика.
Предложенный способ разгрузки управляющих двигателей-маховиков применяется на космических аппаратах системы «ГЛОНАСС».


Глушитель
Пьезокерамический материал
Пневмоглушитель
Комбинированный двигатель летательного аппарата
Устройство для управления процессом сканирования лазерным лучом
Миниатюрный измеритель параметров электризации космических аппаратов с микросистемным вибрационным модулятором электрического поля
Панель солнечной батареи
Устройство для управления лазерным лучом
Способ ограничения срока пассивного существования элементов космического аппарата в околоземном космическом пространстве и устройство для его осуществления
Способ создания беспроводной сети, содержащей множество устройств
Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата

