Результат интеллектуальной деятельности: СПОСОБ ОЦЕНКИ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЯ В ЗАДАННОМ ПОЛОЖЕНИИ
Вид РИД
Изобретение
Настоящее изобретение относится к способу оценки скорости вращения двигателя в заданном положении, более конкретно с целью определить заранее риск изменения на обратное направление вращения упомянутого двигателя.
Изобретение относится вообще к двигателям внутреннего сгорания и более конкретно к двигателям данного типа в автомобилях.
Двигатель внутреннего сгорания, будь то двигатель с искровым зажиганием (карбюраторный двигатель) или двигатель с воспламенением от сжатия (дизельный двигатель), обычно работает при одном направлении вращения. Но когда двигатель останавливается, прежде чем достигнуть своего положения останова, двигатель вращается в одном направлении, затем в другом направлении при колебательном движении относительно своего положения останова.
Со времени разработки систем, широко известных как системы «старт-стоп», стало целесообразно обнаруживать обратное направление вращения двигателя. Действительно, важно определить положение остановленного двигателя, чтобы обеспечить его более быстрый запуск. Так документ WO 2007/028584 относится к способу определения изменения на обратное направление вращения двигателя. В данном документе полезно попытаться определить по возможности точно момент, когда двигатель начинает вращаться в обратном направлении, для того чтобы более точно оценить его положение останова.
Если водитель выдает команду управления остановом, то впрыск топлива в двигатель прекращается, и двигатель быстро останавливается.
Однако есть случаи, в которых изменения на обратное направление вращения двигателя является непредвиденным, при этом возможно, что поршень упомянутого двигателя достигает точки прямо перед или близко к его верхней мертвой точке, и тогда топливо впрыскивается в соответствующую камеру сгорания (и/или выдается команда управления зажиганием). В этом случае возникает процесс горения и приводит в движение поршень, и соответственно двигатель, в обратном направлении вращения.
Если в случае двигателя, вращающегося в обратном направлении во время команды управления остановом, выданной водителем, усилия, оказываемые на поршни, малы, то данные усилия являются значительными, если сгорание приводит в движение двигатель в обратном направлении вращения. В этом последнем случае такие значительные усилия могут повреждать двигатель.
Действительно, большинство современных двигателей, как дизельных двигателей, так и двигателей с искровым зажиганием, содержат маховик, состоящий из двух масс, соединенных вместе посредством пружин, для улучшения удобства вождения. Такие маховики называются двухсекционными маховиками. Одна масса такого маховика соединена с коленчатым валом, и соответственно с поршнями, а другая соединена с трансмиссией (например, ведущим валом коробки передач), и соответственно с транспортным средством. Поэтому важно предотвратить перенапряжение пружин, расположенных между двумя массами, чтобы ограничить механические нагрузки на них. Поэтому предпочтительно предотвращать все условия, в которых упомянутые две массы маховика имеют противоположные направления вращения.
Установленные нежелательные условия представляют собой условия, в которых двигатель глохнет. Двигатель может быть вынужден вращаться в обратном направлении, когда транспортное средство перемещается вперед. В этом случае важно гарантировать, что поршни не подвергаются воздействию значительных усилий.
Все эти напряжения, которые могут прикладываться между массами двухсекционного маховика, заставили изготовителей автомобилей сделать структуру данного типа маховика более прочной, тем самым значительно увеличивая стоимость, хоть и с ограниченной эффективностью.
Документ ЕР 1 462 638 относится к способу и устройству для определения изменения параметра двигателя, в частности скорости вращения двигателя, посредством интерполяции полиномом в скользящем окне с размером w, где w – количество результатов измерений, полученных в окне. Таким образом, данный документ определяет оцениваемые величины внутри окна w измерения.
Проблема, лежащая в основе настоящего изобретения, состоит в том, как предотвратить любое горение, которое приводит в движение двигатель в обратном направлении его вращения, чтобы ограничить напряжение между массами двухсекционного маховика. Таким образом, оригинальная идея авторов изобретения состоит в том, чтобы прогнозировать скорость вращения двигателя в его заданном положении. Действительно, таким образом можно прогнозировать заглохание двигателя.
На основании проблемы заглохания двигателя, оказывается, что прогнозирование скорости вращения двигателя в его заданном положении, в частности при низких скоростях двигателя, могло бы также быть полезным при запуске двигателя, например, чтобы сберечь стартер и останавливать его, как только удовлетворяются требования к скорости, позволяющие двигателю работать в исправном состоянии. При запуске, прогнозирование скорости вращения может быть также использовано для регулирования стартера и для воздействия на богатство смеси в камерах сгорания.
Данное прогнозирование скорости может быть также использовано в транспортном средстве, которое содержит как двигатель внутреннего сгорания, так и электродвигатель, обычно называемом гибридным транспортным средством, для того чтобы предвидеть заглохание двигателя внутреннего сгорания и запуск электродвигателя (в зависимости от условий).
Таким образом, целью настоящего изобретения является создание средств для определения заранее скорости вращения двигателя в его заданном положении. Таким образом, изобретение может быть использовано, например, для прогнозирования изменения на обратное направление вращения двигателя, тем самым предотвращая любое горение, которое приводит в движение двигатель в обратном направлении его вращения. Оно может быть также использовано для управления двигателем в других применениях, например, для управления двигателем при низких скоростях двигателя.
Для данной цели, настоящее изобретение оригинально предлагает способ оценки скорости вращения двигателя внутреннего сгорания в его заданном положении, причем упомянутый двигатель содержит:
- флажок с зубцами, который соединен с коленчатым валом,
- датчик, взаимодействующий с упомянутыми зубцами, и
- средства для управления двигателем, включающие в себя средства для определения углового положения коленчатого вала, называемого также угловым положением двигателя, и генератор синхроимпульсов, используемый для определения временного интервала между двумя последовательными проходами зубца перед датчиком.
В соответствии с настоящим изобретением упомянутый способ включает в себя следующие этапы:
- определение углового положения и скорости вращения для первой измерительной точки и второй измерительной точки датчика,
- определение по меньшей мере одного градиента скорости вращения, помимо градиента скорости между упомянутыми двумя измерительными точками в предыдущем этапе,
- аппроксимация действительной кривой скорости вращения в отношении упомянутого углового положения с использованием полиномиальной функции 2-го порядка, и
- вычисление заранее оцениваемой скорости вращения в заданном положении, причем данное последнее положение представляет собой будущее угловое положение коленчатого вала, посредством применения полиномиальной функции в упомянутом заданном будущем положении.
Способ, описанный в данном документе, позволяет определять заранее скорость вращения двигателя в будущем угловом положении двигателя. Данная оценка является достоверной для интервала, в котором скорость увеличивается, или для интервала, в котором скорость уменьшается.
Оригинально, проведенная оценка представляет собой функцию, в которой переменной является угловое положение двигателя (а не временная переменная). Это позволяет упростить вычисления и таким образом ограничить нагрузку на микропроцессор, используемый для упомянутых вычислений.
Выбранные точки представляют собой любые точки на кривой. При этом предпочтительно они расположены, во-первых, достаточно близко друг к другу и, во-вторых, не слишком далеко от точки, для которой должна быть проведена оценка скорости.
В таком способе, для учета последнего градиента скорости, упомянутая первая измерительная точка и упомянутая вторая измерительная точка представляют собой измерительные точки, соответствующие измерениям датчика для двух последовательных зубцов.
Предпочтительно для учета изменения в градиенте скорости аппроксимацию скорости вращения в отношении углового положения определяют в виде кривой 2-го порядка, проходящей через упомянутые две измерительные точки и содержащей изменение градиента скорости, определяемое на основе измеренного градиента скорости. В этом случае предпочтительно вычислять полиномиальную оценку, имея в виду, что изменение градиента скорости представляет собой постоянную величину, соответствующую изменению в градиенте скорости между, во-первых, градиентом скорости, полученным из первой измерительной точки и второй измерительной точки, и, во-вторых, определенным отличающимся градиентом скорости. Посредством устанавливания места на кривой, где градиент скорости определен (помимо градиента скорости между первой измерительной точкой и второй измерительной точкой), можно учитывать либо изменение градиента скорости, которое находится очень близко к измерительным точкам, либо дальше. Данное изменение градиента скорости осуществляется измерительными точками, по меньшей мере одна из которых отличается от первой измерительной точки и от второй измерительной точки. Измерительные точки, используемые для данного изменения градиента скорости, могут представлять собой сигналы, подаваемые датчиком для двух соседних зубцов, а также для двух более или менее отделенных зубцов.
Настоящее изобретение также предлагает способ прогнозирования обратного вращения двигателя, отличающийся тем, что он включает в себя следующие этапы:
- оценка скорости вращения двигателя в заданном угловом положении, как было предложено выше,
- сравнение скорости вращения двигателя при заданном пороге в зависимости от углового положения, в котором была произведена оценка угловой скорости, и
- прогнозирование обратного вращения, если оцениваемая скорость ниже заданного порога.
В данном способе скорость двигателя оценивают, например, вблизи верхней мертвой точки двигателя, т.е. меньше чем 10° от верхней мертвой точки, и предпочтительно в упомянутой верхней мертвой точке двигателя. При этом заданный порог, например, находится между 240 и 360 об/мин (т.е. между 8 и 12πрад/с).
Настоящее изобретение относится также к способу управления двигателем, включающему в себя следующие этапы:
- прогнозирование обратного вращения двигателя, как было предложено выше,
- если прогнозируется обратное вращение, в то время как стартерное устройство не является активным в двигателе, то последующее горение предотвращено.
Для того чтобы предотвратить последующее горение, устройство управления двигателем воздействует на средство впрыскивания топлива, чтобы предотвратить последующий впрыск (или последовательность впрысков в течение очень короткого промежутка времени) в случае дизельного двигателя, а для двигателя с искровым зажиганием (карбюраторного двигателя) осуществляется воздействие на впрыск топлива и/или зажигание двигателя.
Такой способ управления двигателем может также включать в себя следующие этапы:
- обнаружение любого обратного вращения двигателя, и если такое обратное вращение обнаружено, то упомянутый способ прогнозирования заканчивают, в противном случае предполагается, что двигатель приводится во вращение, и упомянутый способ прогнозирования продолжают.
Наконец, настоящее изобретение относится также к устройству для управления двигателем, отличающемуся тем, что оно содержит средства для реализации каждого из этапов вышеописанного способа.
Детали и преимущества настоящего изобретения изложены более подробно в приведенном ниже описании со ссылкой на прилагаемые схематические чертежи, из которых:
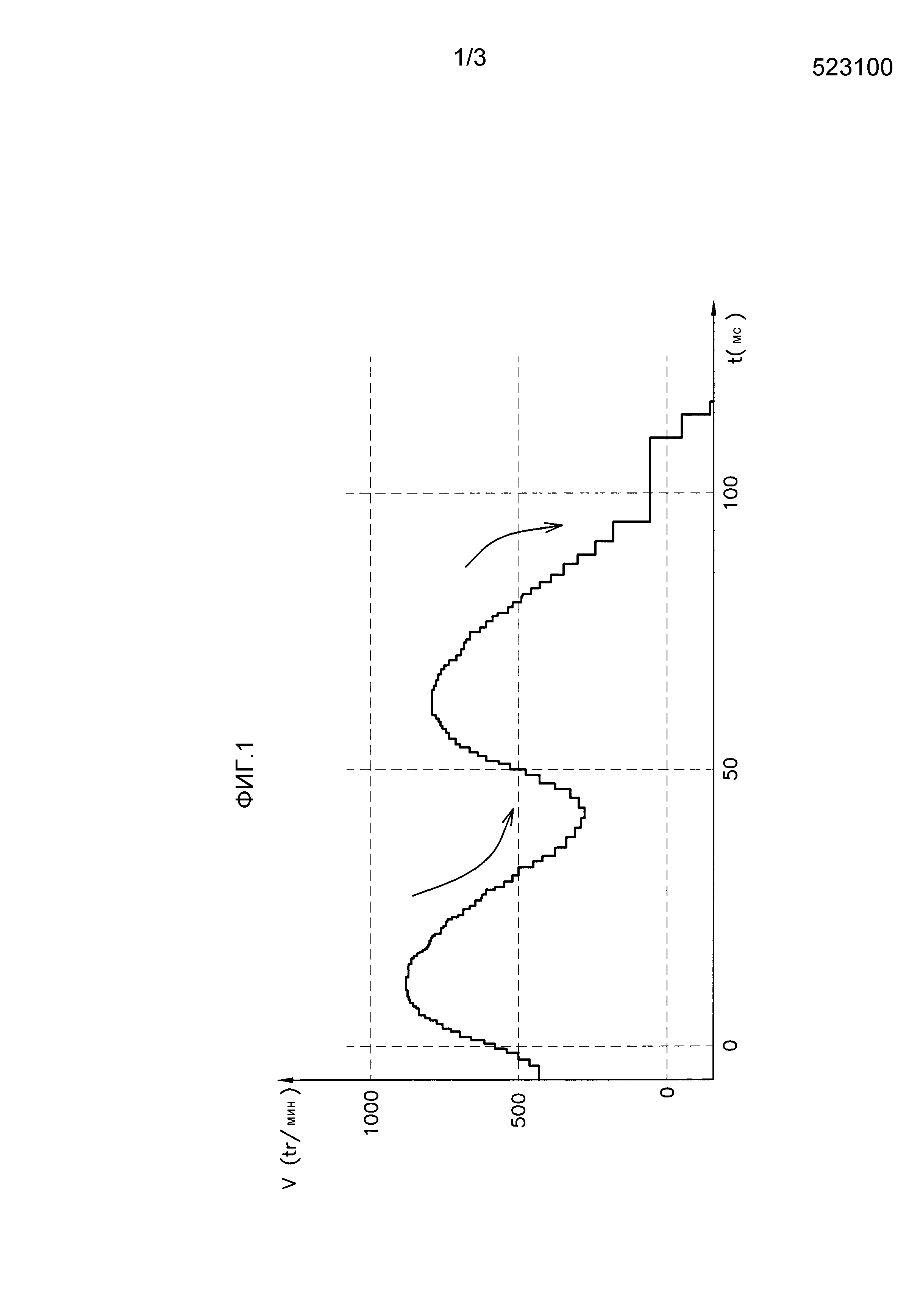
Фиг. 1 представляет собой график, показывающий скорость вращения двигателя в зависимости от времени, в котором он глохнет.
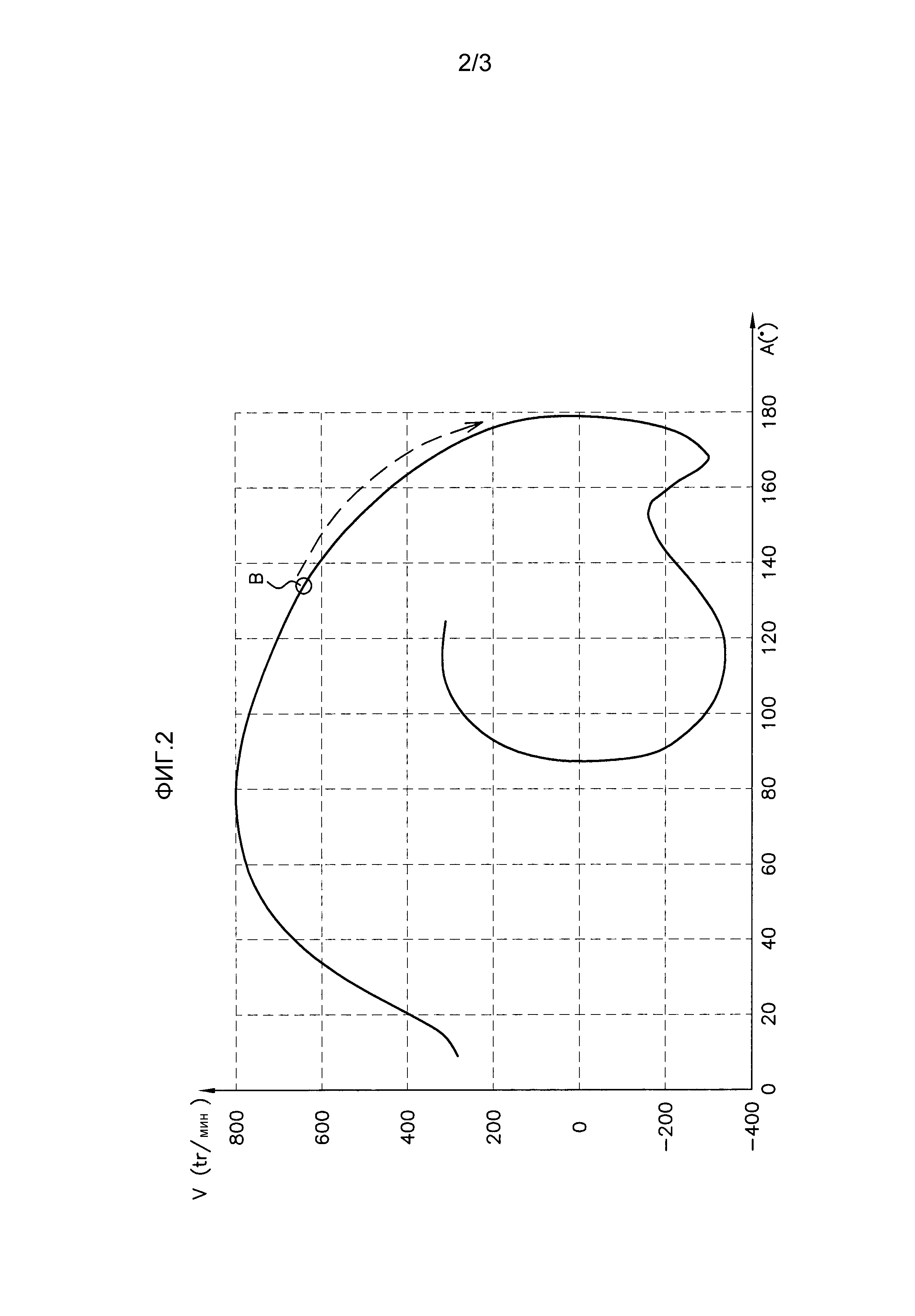
Фиг. 2 представляет собой другой график скорости вращения двигателя в зависимости от его углового положения, когда четырехцилиндровый двигатель глохнет, причем на оси х графика показана фаза 180°, и
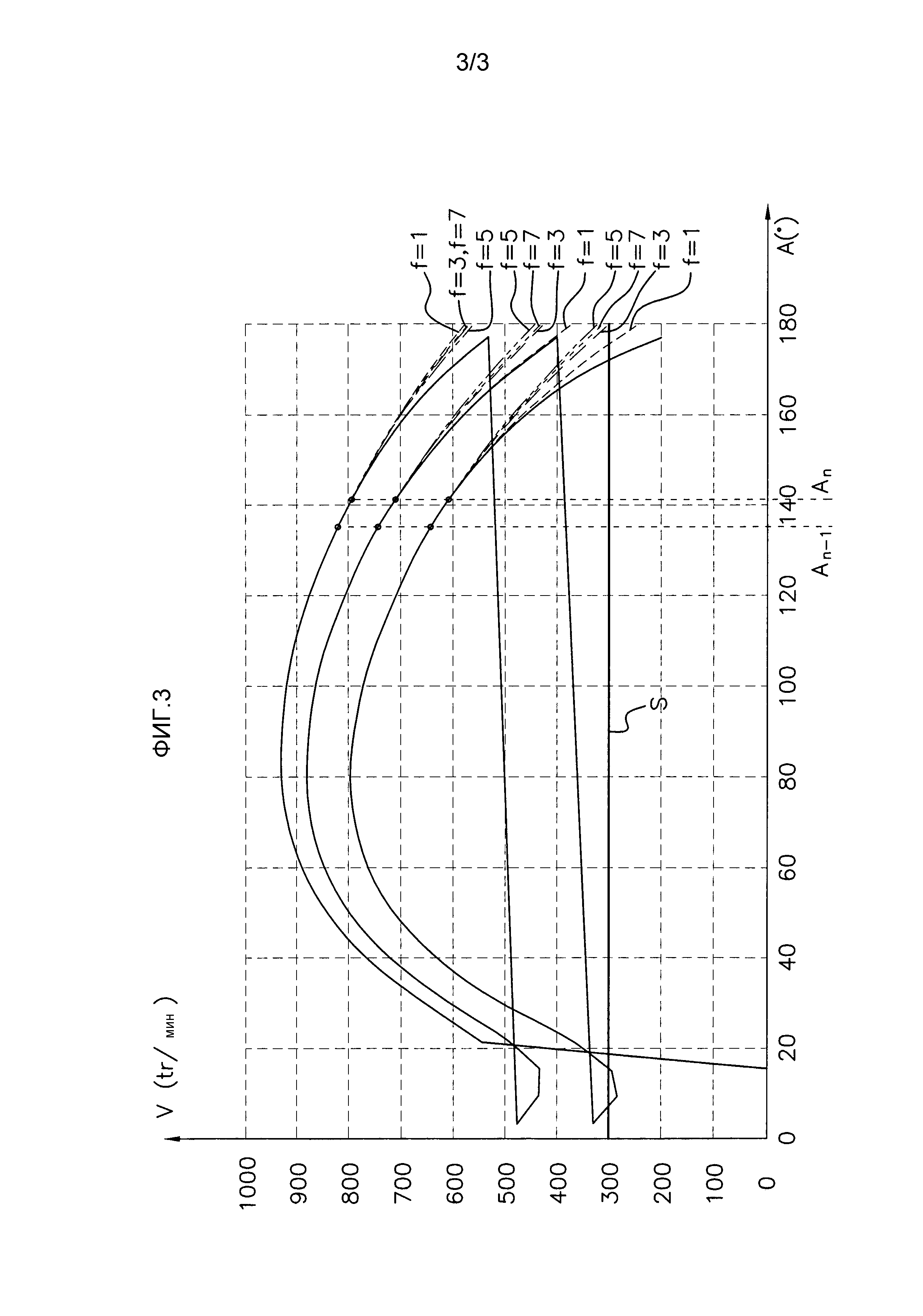
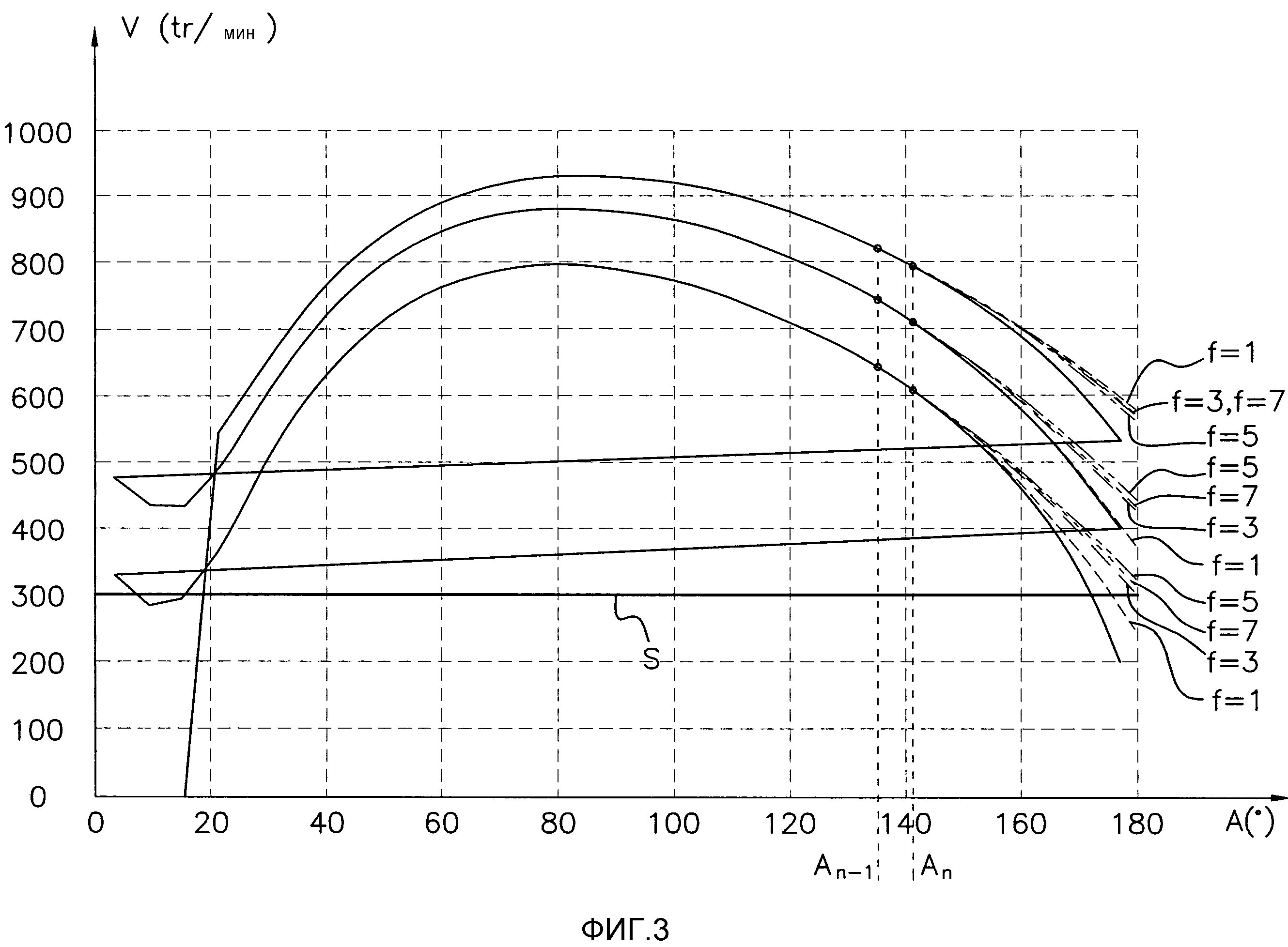
Фиг. 3 представляет собой график, подобный графику, показанному на фиг. 2, показывающий разные варианты осуществления настоящего изобретения.
Данное описание относится к дизельному двигателю внутреннего сгорания или двигателю внутреннего сгорания с искровым зажиганием (карбюраторному) двигателю. Такой двигатель обычно содержит блок цилиндров, в котором расположены подвергнутые механической обработке цилиндры, которые на одном своем конце закрыты головкой блока цилиндров. Цилиндры содержат поршни, соединенные с коленчатым валом посредством штока поршня. На одном конце коленчатого вала закреплен маховик. Положение коленчатого вала определяет положение двигателя, т.е. если известно данное положение, то известно положение всех поршней в соответствующих цилиндрах и положения множества других механических деталей двигателя. Поскольку коленчатый вал не имеет никакой степени свободы при вращении, положение двигателя определяется угловой величиной, называемой (угловым) положением двигателя. Кроме того, в оставшейся части описания предполагается, что рассматриваемый двигатель имеет четырехтактный цикл. Таким образом, для каждого цилиндра цикл полного сгорания осуществляется после того, как коленчатый вал совершил два оборота. В этом случае положение двигателя может быть определено фазой 720°, т.е. двумя полными оборотами на 360°.
Для того чтобы определить положение двигателя, обычно коленчатый вал снабжают флажком с зубцами, распределенными равномерно в угловой периодичностью Р, при этом исходная точка определяется посредством длинного зубца, соответствующего, например, двум зубцам и интервалу между ними, или посредством отсутствия одного или двух зубцов. Датчик положения соединен с флажком и подсчитывает зубцы, проходящие перед ним. Время прохода между двумя последовательными зубцами также измеряется с использованием датчика и генератора синхроимпульсов, встроенного в электронную систему управления двигателем. В дальнейшем предполагается, что количество зубцов N соответствует 360/Р. Таким образом, для того чтобы зубцы были распределены равномерно с угловым шагом 6°, предусмотрено 60 зубцов, и поэтому особенность, определяющая исходную точку, не учитывается.
Настоящее изобретение более конкретно предназначено для реализации в двигателях, содержащих двухсекционный маховик. Такой маховик содержит две массы, соединенные вместе посредством пружин. Одна масса жестко соединена с коленчатым валом, а другая жестко соединена с трансмиссией, которая позволяет ей передавать энергию, вырабатываемую в двигателе, на колеса, называемые движущими колесами, транспортного средства. Однако изобретение может быть также реализовано с «обычным» маховиком с одной вращающейся массой, которая соединена с муфтой сцепления.
Фиг. 1 показывает скорость V вращения двигателя, выраженную в оборотах в минуту (об/мин), в зависимости от времени t (в секундах «с» или миллисекундах «мс») непосредственно перед тем, как двигатель глохнет.
Показанная кривая ступенчатая, поскольку измерительные точки являются дискретными. Ось х определяется непосредственно датчиком положения, при этом скорость получена посредством измерения времени, разделяющего два прохода зубцов перед данным датчиком. Поскольку шаг между двумя зубцами является постоянным, скорость обратно пропорциональна времени, разделяющему обнаружение двух последовательных зубцов.
На фиг. 1 можно видеть, что измеренная скорость становится отрицательной, что означает, что двигатель (коленчатый вал) вращается в направлении, противоположном нормальному направлению его вращения. Данная скорость становится отрицательной перед верхней мертвой точкой, однако данная отрицательная скорость фактически обнаруживается только после данной верхней мертвой точки.
Фиг. 2 показывает изменение скорости по-другому, когда рассматриваемый двигатель глохнет. В данном случае двигатель представляет собой четырехтактный двигатель, в котором горение возникает каждые 180°. Данный тип двигателя выбран произвольно и только для пояснительных, не ограничивающих целей, и для специалиста в данной области техники будет понятно, что изобретение может быть также применено к двигателям с другим количеством цилиндров. В данном чертеже показан угловой диапазон от 0° до 180°. В случае четырехцилиндрового двигателя два поршня достигают верхней мертвой точки при 180°, причем один после такта выхлопа в соответствующей камере сгорания, а другой после сжатия воздуха (дизельный двигатель) или воздушной смеси (карбюраторный двигатель) в соответствующей камере сгорания. Когда двигатель глохнет, поршень в конце фазы сжатия не достигает верхней мертвой точки, и сжатая текучая среда в соответствующей камере сгорания проталкивает его обратно. При этом поршень приводит коленчатый вал в обратное вращение.
Если устройство управления двигателем не знает, что поршень перемещается обратно и приводит коленчатый вал в обратное вращение, оно будет выдавать команду управления на впрыск топлива и/или зажигание, как если бы двигатель продолжал работать в нормальном направлении его вращения. Если сжатие в соответствующей камере сгорания является достаточным, то горение будет возникать и будет приводить в движение двигатель в обратном направлении его вращения. Данное горение создает значительные напряжения в двигателе, которые являются потенциально повреждающими, в частности, для двухсекционного маховика.
Настоящее изобретение оригинально предлагает определение скорости вращения двигателя заранее. Это позволяет информировать устройство управления двигателем заранее о любом прогнозируемом обратном вращении двигателя. Такое предварительное определение скорости вращения двигателя может быть также использовано для управления впрыском и/или зажиганием, например, при запуске двигателя или в общем при низких скоростях двигателя.
На фиг. 2, идея, лежащая в основе настоящего изобретения, состоит в том, чтобы использовать скорости и изменения скорости для определения, в точке В, проекции скорости вращения для будущего углового положения, например, в следующей верхней мертвой точке или около нее.
Вычисление для определения скорости вращения рассматриваемого двигателя приведено ниже в описании. Как было упомянуто выше, в данном случае предполагается, что двигатель представляет собой двигатель с четырьмя цилиндрами. Кроме того, упомянутое вычисление будет выполняться в конце фазы сжатия.
Оригинально, скорость V вращения двигателя определяют не как функцию временной переменной, а как функцию углового положения А двигателя.
Во время фазы сжатия (от 0° до 180° для четырехцилиндрового двигателя) двигатель по существу заторможен, поскольку усилия, оказываемые на поршни, препятствуют их перемещению. При этом поршни должны иметь достаточную энергию и соответственно скорость, соответствующую достаточной скорости вращения, для прохождения следующей верхней мертвой точки.
Настоящее изобретение предлагает аппроксимацию скорости V вращения с использованием полиномиальной функции 2-го порядка в отношении углового положения А двигателя.
В данном случае изменение в градиенте скорости вращения является постоянной величиной в направлении вращения вперед. Следовательно:
V''(A)=a,
где а – действительная постоянная величина.
Интегрируя данную формулу по угловому положению, получаем:
V'(A)=a A+b,
где b – действительная постоянная величина.
Интегрируя вторично, получаем:
(1):V(A)=Ѕ аА2+bA+c,
где с – действительная постоянная величина.
Таким образом, полезно определить постоянные a, b и с, чтобы позволить определить полиномиальную функцию, которая позволит сделать точную оценку скорости вращения двигателя заранее.
Первый вариант состоит в том, чтобы провести последние три измерения и определить кривую 2-го порядка, проходящую через эти три точки. Результаты, полученные с использованием действительных измерений, не обеспечивают точного и надежного прогнозирования, и данный вариант был отвергнут.
В данном документе предлагается, принимая во внимание предпочтительный вариант осуществления, для вычисления постоянных а, b и с:
- последняя измерительная точка для учета последней измеренной скорости,
- предпоследняя измерительная точка для учета градиента последней скорости, и
- ранее измеренный градиент скорости для учета изменения в градиенте скорости.
В результате получаем следующие уравнения:
(2): а=V''(A)
(3): V(An)=Ѕ а An2+b An+c
(4): V(An-1)=Ѕ а An-12+b An-1+c
Градиент скорости соответствует изменению в скорости, поделенному на изменение в угловом положении, т.е. V'(A)=ΔV/ΔА
Градиент скорости, вычисленный с использованием двух последовательных измерительных точек, соответствует (приблизительно) градиенту скорости в средней точке между двумя рассматриваемыми измерительными точками. Однако, учитывая, что измерение должно быть проведено в точке n, чтобы определить градиент скорости в средней точке между двумя измерительными точками (n-1) и n, данный градиент скорости ниже будет называться как V'(An). Следовательно:
V'(An)=[V(An)-V(An-1)]/(An–An-1)
При этом две последовательные измерительные точки соответствуют прохождению двух последовательных зубцов, которые разделены шагом Р. Следовательно:
(5): V'(An)=[V(An)-V(An-1)]/P
Соответственно:
(6): V''(An)=[V'(An)-V'(An-1)]/P: как можно видеть выше, в данном случае это постоянная а (см. уравнение 2 выше).
В данном случае, V''(An) вычислена с использованием трех последовательных измерительных точек (n-2), (n-1) и n, при этом первые две точки используются для вычисления V'(An-1), а последние две используются для вычисления V'(An).
Для того чтобы учесть изменение в градиенте скорости в более длительном интервале, V''(An) может быть, например, определена как изменение в градиенте скорости между точкой (n-f) и точкой n.
Отсюда получаем:
(7): V''(An)=[V'(An)-V'(An-f)]/P×f
Затем данную величину выбирают для постоянной а. Можно видеть, что уравнение 7 соответствует уравнению 6 при f=1.
Зная постоянную а, можно получить величину постоянной b, например, посредством определения разности между уравнениями 3 и 4. Отсюда получаем:
V(An)-V(An-1)=[Ѕ а An2+b An+c]-[Ѕ а An-12+b An-1+c]
V(An)-V(An-1)=Ѕ а(An2-An-12)+b(An-An-1)
при этом Р=An-An-1
Следовательно:
(8): b=[V(An)-V(An-1)]/P–а/2(An+An-1)
Поскольку а и b известны, постоянная с может быть получена из одного из уравнений 3 или 4. Отсюда получаем, например:
(9): с=V(An)-Ѕ а An2–b An
Подставляя три только что вычисленные постоянные в полиномиальную формулу, соответствующую уравнению 1, и упрощая, в результате получаем:
(10): V(A)=V(An)+[(V(An)-V(An-1))(A-An)/Р]
+[(V(An)-V(An-1))-(V(An-f)-V(An-f-1))](A–An)(A–An+P)/2fP2
Данная формула используется для угловых диапазонов, в которых градиент скорости не изменяет знака, т.е., например, перед достижением верхней мертвой точки.
В данном случае предполагается, что двигатель продолжает работать в нормальном направлении его вращения. Если же двигатель начинает вращаться в обратном направлении, то формула 10 будет переоценивать скорость.
Фиг. 3 представляет собой чертеж кривых, полученных при разных величинах «f». В данном чертеже кривая, показанная сплошной линией, соответствует скорости вращения двигателя в зависимости от его углового положения в фазе 180°. Кривые, показанные пунктирными линиями, показывают кривые оценки скорости при разных величинах f. В данном чертеже можно видеть, что скорость, оцениваемая посредством полиномиальной функции, переоценена. Можно также видеть, что если двигатель не глохнет (две более высокие оценки), то кривые, соответствующие оцениваемой скорости, очень близки к кривой измеренной скорости (сплошной линии), поскольку если двигатель собирается заглохнуть и вращаться в обратном направлении (третья группа кривых, показанных пунктирными линиями, ниже первых двух), то оценка скорости находится дальше от измеренной кривой.
Оценка скорости вращения двигателя используется в данном случае для того, чтобы попытаться спрогнозировать, обладают ли поршни двигателя достаточной кинетической энергией, чтобы проходить следующую верхнею мертвую точку. При этом необходимо отметить, как можно видеть, например, на фиг. 3, что скорость вращения двигателя является наименьшей не в верхней мертвой точке, а вскоре после данного положения.
В соответствии с проведенными измерениями, в общем отмечено для разных двигателей внутреннего сгорания, что если скорость вращения больше порога S (фиг. 3), равного примерно 300 об/мин, когда (по меньшей мере) один поршень двигателя находится в верхней мертвой точке, то двигатель будет продолжать работать в своем нормальном направлении вращения, без обратного вращения.
Таким образом, в соответствии с настоящим изобретением предлагается определять, прежде чем поршень достигнет верхней мертвой точки, (оцениваемую) скорость упомянутого поршня, когда он проходит упомянутую верхнюю мертвую точку.
Интуитивно, вычисление должно быть выполнено непосредственно перед достижением верхней мертвой точки. Вычисление, например, может быть выполнено в пределах от 5° до 80° перед верхней мертвой точкой, предпочтительно в пределах от 10° до 40° перед верхней мертвой точкой.
После того как проведена оценка скорости в верхней мертвой точке, оцениваемая (вычисленная) скорость сравнивается с порогом S. Если оценка ниже порога, то риск возникновения обратного вращения очень высок. В этом случае изобретение предлагает блокирование команды на впрыск топлива и/или последующее зажигание, которая запланирована для камеры сгорания, в которой воздушная смесь подвергается сжатию.
В некоторых случаях данное блокирование не осуществляется. Действительно, предполагается, что двигатель находится не в фазе запуска и что его стартер соответственно находится не в рабочем режиме.
Затем можно проверить, было ли обратное вращение. Для обнаружения такого обратного вращения существуют разные средства, известные специалисту в данной области техники (например, способ, описанный в документе WO-2007/028584, упомянутый в вводной части настоящего документа).
Если обратное вращение обнаружено после прогнозирования данного обратного вращения и предотвращения горения, то можно сделать вывод о том, что прогнозирование было достоверным и таким образом предотвращение горения помогло предохранить двигатель, и более конкретно его двухсекционный маховик. В таком случае двигатель останавливается, и процесс прогнозирования может быть закончен.
В противном случае, в котором обратное вращение не обнаружено, можно предположить, что внешнее усилие привело в движение двигатель. Это тот самый случай, когда транспортное средство приводит в действие двигатель во время вращения. В таком случае предпочтительно продолжить упомянутый способ прогнозирования для следующего прохода или проходов в верхней мертвой точке.
При некоторых условиях система управления двигателем дает команду вычисления скорости в верхней мертвой точке. Вычисление может быть инициировано в нижних уровнях, обычно также называемых базовым программным обеспечением (basic software – BSW) системы управления. Для данного двигателя установлено несколько разных параметров. Так в формуле 10 шаг Р является постоянной величиной для каждого двигателя. Соответственно, после того как определена стратегия, величины An и А - An являются постоянными величинами. В таком случае вычисление может быть инициировано, например, когда зубец флажка, соответствующий 160°(=An), проходит перед датчиком. Если скорость оценивают в верхней мертвой точке (т.е. 180°), то А-An=20°. Соответственно величина f задается как функция характеристик двигателя.
Упрощенная формула 10 хранится в памяти и запускается посредством прикладного программного обеспечения (Applicative Software – ASW). Эта часть системы управления, в которой выполняется оценка скорости, иногда называется «верхними уровнями» системы.
Проведенные испытания показали, что система управления предусматривает примерно 10 мс (т.е. 10⋅10-3 с), или 30 мс или более, между мгновением, в котором оценка скорости в верхней мертвой точке известна, и мгновением, когда должна быть выдана команда на впрыск топлива и/или зажигание. Это время является достаточным для того, чтобы выдать команду предотвращения горения, запланированного вблизи подхода к верхней мертвой точке.
Конечно, в зависимости от предполагаемого применения прогнозирования скорости вращения, данное прогнозирование будет выполняться только при некоторых условиях. Если предполагается обнаруживать обратное вращение двигателя заранее, то вычисление будет выполняться, например, только, если скорость двигателя меньше скорости двигателя на холостом ходу.
Настоящее изобретение является оригинальным в ряде разных аспектов. Во-первых, оно предлагает прогнозирование скорости вращения. Это позволяет предвидеть любое обратное вращение двигателя. В известном уровне техники обратное вращение обычно более или менее быстро обнаруживается, но не предвидится, как описано выше. Поэтому для прогнозирования скорости вращения было решено выражать данную скорость в зависимости от углового положения двигателя (а не в зависимости от временной переменной). Это облегчает вычисления и позволяет ограничить вычислительную нагрузку на соответствующий процессор. Наконец, оригинальным является также решение аппроксимировать кривую скорости с использованием полиномиальной функции 2-го порядка и способ определения соответствующих постоянных с учетом градиента скорости и его изменения.
Настоящее изобретение позволяет обнаруживать любое обратное вращение двигателя заблаговременно. Эмпирическое правило утверждает, что если проход зубца длится по меньшей мере в 1,3 раза дольше, чем предыдущий проход, то нужно прогнозировать обратное вращение. Изобретение позволяет определять, еще до применения данного эмпирического правила, нужно ли прогнозировать обратное вращение.
Проведенные программы имитационного моделирования показали, что аппроксимация с использованием полиномиальной функции 2-го порядка работает очень хорошо для разных типов заглохания, которые могут возникать. Действительно, изменения в скорости вращения двигателя перед заглоханием отличаются в зависимости от условий, при которых возникает заглохание. Заглохание может возникать, когда транспортное средство начинает перемещаться вперед. Если водитель совершает ошибку и вместо первой передачи включает вторую или третью передачу, то двигатель не сможет приводить в движение транспортное средство, и он будет глохнуть. Заглохание возможно также в том случае, когда транспортное средство движется на второй передаче и затем вместо третьей передачи включают пятую передачу. В этом случае двигатель может также быть вынужден глохнуть. И наоборот, в фазе замедления, если водитель забывает выбрать более низкую передачу, то двигатель может быть вынужден работать со скоростью, которая ниже скорости двигателя на холостом ходу, и глохнуть. Во всех случаях, когда скорость вращения двигателя уменьшается, было обнаружено, что проведенная аппроксимация была хорошей и позволяла достоверно прогнозировать обратное вращение двигателя.
Конечно, настоящее изобретение не ограничено вышеописанным предпочтительным вариантом осуществления и его модификациями. Оно также относится ко всем альтернативным вариантам осуществления, доступным специалисту в данной области техники.
Способ эксплуатации тахографа и тахограф
Способ и устройство для кодирования слов данных
Генератор импульсов для устройства, в частности для тахографа, и способ эксплуатации генератора импульсов
Цифровой блок тахографа, цифровая система тахографа и способ эксплуатации системы тахографа
Устройство передачи данных скорости
Тахограф, бортовой блок для сбора за пользование дорогой (maut-on-board-unit), индикаторный прибор и система
Способ эксплуатации сенсорного устройства и сенсорное устройство
Аккумулятор энергии
Способ определения состояния восстановителя в баке для восстановителя
Система и бортовое устройство для интеграции функций автомобильных устройств

