Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ИЗБЫТОЧНОСТЬЮ БОРТОВОЙ ИНТЕГРИРОВАННОЙ ВЫЧИСЛИТЕЛЬНОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области вычислительной и контрольно-измерительной техники и может использоваться в системах цифровой обработки информации и управления, содержащих избыточные аппаратные и программные средства, с целью обеспечения отказоустойчивости данных систем.
Концепция интегрированной модульной авионики (ИМА) [1] широко признана авиационными специалистами и промышленностью. Цели, возможности [2] и архитектуры [3] ИМА являются достаточно универсальными и отражают основные современные концепции, относящиеся к высоконадежным интегрированным комплексам авионики.
Интегрированная модульная авионика второго поколения (ИМА2), в отличие от ИМА, охватывает не только вычислительные ресурсы обработки данных (централизованные в ИМА первого поколения), но более широкий круг подсистем и блоков авионики. Она развивается в сторону распределенной вычислительной среды, охватывает также подсистемы командного управления, обработки сигналов, подсистемы ввода/вывода. Определились новые требования к совокупности вычислительных и коммуникационных средств бортовой авионики как к единой бортовой интегрированной вычислительной среде (БИВС). Такая среда должна обеспечивать вычислительными и коммутационными ресурсами обработку информационных потоков разных (в пределе -всех) иерархических уровней; она должна также обеспечивать передачу всех видов трафика бортовой авионики, заменяя применяемые в настоящее время отдельные системы шин и линий связи различных типов - сенсорных связей, шин данных, командных шин и отдельных линий, используемых для передачи разнородных сигналов (временных меток, разовых команд и др.).
Присущая такой среде гибкость размещения функциональных приложений на вычислительных ресурсах создает принципиально новые возможности унификации комплексов бортового оборудования и обеспечения их отказоустойчивости.
Известна отказоустойчивая вычислительная система с аппаратно-программной реализацией функций отказоустойчивости и динамической реконфигурации [4], которая может быть использована для решения задач управления бортовыми системами транспортного корабля. Техническим результатом указанного изобретения является ускорение и автоматизация процесса реконфигурации в отказоустойчивых системах. Указанное изобретение и данная заявка близки по назначению - управление и реконфигурация комплекса оборудования (КО). Но в указанном изобретении рассматривается не БИВС в целом, а только вычислительная система с четырьмя специальным образом устроенными и взаимодействующими друг с другом вычислительными машинами.
Известны способ и устройство формирования архитектуры комплекса бортового оборудования на основе сетевой технологии AFDX [5]. Эти способ и устройство для его реализации выбраны в качестве прототипа.
Судя по опубликованным результатам, известные подходы обладают следующими особенностями:
1. Задача отказоустойчивости решается применительно к вычислительным ресурсам путем однородного резервирования, т.е. за счет специально для этого предусмотренных избыточных средств с аналогичными функциями и их размещением.
2. Архитектурный подход на основе AFDX не в полной мере подходит для интегрированной сетевой инфраструктуры ИМА2, поскольку архитектура и протоколы AFDX, оптимизированные для обеспечения детерминированной задержки доставки сообщений при приемлемой в целом пропускной способности, дают диапазон значений времени задержки, не приемлемый для некоторых видов функциональных приложений. В частности, они не соответствуют критическим по времени приложениям быстрых контуров управления, где низкие задержки являются ключевым показателем. В результате для таких частей бортовой авионики распределенной архитектуры с требованиями малых задержек и коротких рабочих циклов сети AFDX редуцируются к так называемым «легким» сетевым соединениям LC-AFDX (Low Capacity AFDX) [6] как «частным» системам связи, фактически в большинстве случаев вырождающимся в прямые радиальные связи типа точка-точка.
Указанные обстоятельства существенно сужают возможности решения проблем обеспечения отказоустойчивости вычислительной среды и комплекса бортового оборудования в целом.
Целью настоящего изобретения является улучшение технико-эксплуатационных характеристик БИВС в составе интегрированного комплекса бортового оборудования (КБО) аппаратов различного назначения.
Эта цель достигается тем, что в способе управления избыточностью БИВС маршрутизация информационных потоков от источников к получателям осуществляется выбором из избыточного числа альтернативных путей, каждый из которых обладает непосредственным доступом коммуникационных средств, включая высокоскоростные линии передачи данных, сетевые коммутаторы и маршрутизаторы, как к вычислительным ресурсам (устройства памяти и вычислители), так и к различным конструктивно целостным и обособленным компонентам (сенсоры, актюаторы, дисплеи и сигнализаторы) функциональных систем (ФС) комплекса оборудования. Формирование альтернативных путей осуществляется автономно различными вычислителями на конкурсной основе с учетом дисциплинирующих правил (приоритет запроса на информацию, очередность подачи заявки на формирование пути, защита от коллизий и перегрузок компонентов, правила предпочтений доставляемой информации и др.).
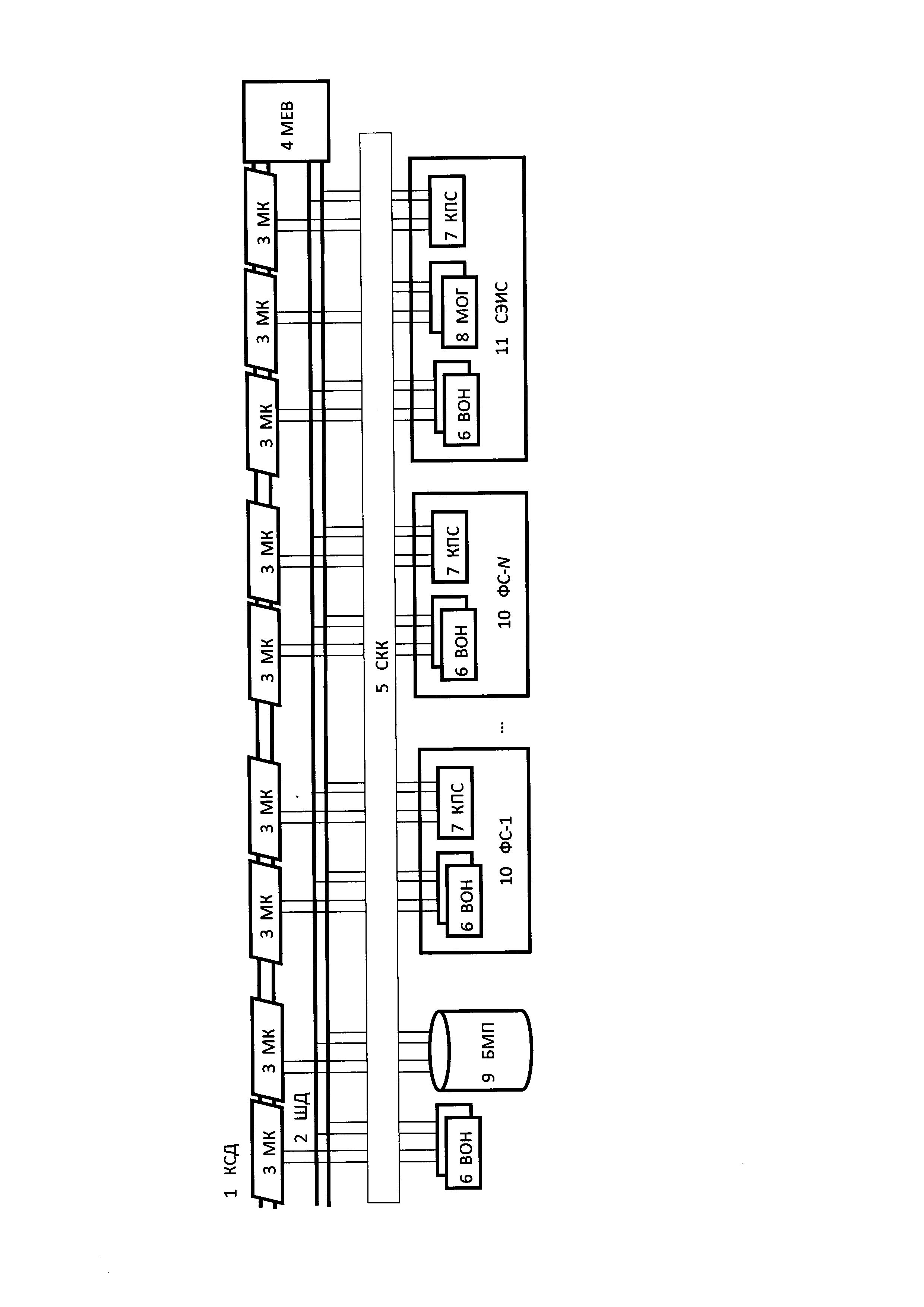
Изобретение и его особенности поясняются чертежом, на котором изображена функциональная схема БИВС согласно настоящему изобретению, где:
1 - Высокоскоростная коммутационная среда пакетов данных;
2 - Шины данных;
3 - Маршрутизирующий коммутатор;
4 - Модуль единого времени;
5 - Множество сетевых контроллеров/концентраторов;
6 - Вычислитель общего назначения;
7 - Контроллер периферийных систем;
8 - Модуль обработки графических изображений;
9 - Бортовая массовая память;
10 - Функциональная система бортового комплекса;
11 - Система электронной индикации и сигнализации.
Поскольку способ реализуется при помощи работы устройства (см. чертеж), то полное его описание приведено в разделе пояснения работы этого устройства.
Бортовая интегрированная вычислительная среда (БИВС) включает резервированную высокоскоростную коммутационную среду пакетов данных (КСД) 1, в качестве которой может использоваться, например, интерфейс SpaceWire, резервированную шину данных (ШД) 2 без жестких требований к скорости, представленную, например, интерфейсом STD-1553B (или AFDX), маршрутизирующие коммутаторы (МК) 3, дублированный модуль единого времени (МЕВ) 4, сетевые контроллеры/концентраторы (СКК) 5, вычислители общего назначения (ВОН) 6, контроллеры периферийных систем (КПС) 7, модули обработки графических изображений (МОГ) 8 и бортовую массовую память (БМП) 9. Однотипные или взаимозаменяемые ВОН 6 образуют основной вычислительный ресурс БИВС. Каждый ВОН 6 в соответствии с техническими характеристиками и загружаемыми пакетами программ может использоваться для обработки информации и вычислений каждой из N функциональных систем (ФС) 10 интегрированного КО. При этом для решения задач формирования (синтеза) в реальном времени и отображения изображений в составе системы электронной индикации и сигнализации (СЭИС) 11 эти вычислители дополняются МОГ 8. Все ВОН 6 номинально (не обязательно конструктивно) могут входить в состав ФС 10 интегрированного КО, включая СЭИС 11. Все коммутации ВОН 6, МОГ 8 и КПС 7 с шинами КСД 1 и ШД 2 осуществляются посредством СКК 5. КПС 7 размещены в ФС 10 и СЭИС 11, имеют специфику, обусловленную особенностями компонентов последних, и обладают унифицированными интерфейсами для взаимодействия с СКК 5. Маршрутизирующие коммутаторы (МК) 3 используются для обеспечения доставки пакетов по избыточным каналам КСД 1.
Работает устройство (см. чертеж) следующим образом.
Каждый ВОН 6 наряду с комплектом прикладных программ по назначению ФС 10 содержит пакет программ, реализующий распределенное управление избыточностью КБО. Основой такого управления может быть, например, периодический арбитраж по аналогии с [7, 8]. Конкурирующие между собой конфигурации БИВС не обязательно должны быть однозначно связаны с конкурирующими между собой ВОН 6. Возможны раздельные или каким-либо образом согласованные арбитражи конфигураций БИВС и ВОН 6. В результате так или иначе проведенного арбитража осуществляется выбор ведущего ВОН 6 и доминирующей конфигурации БИВС с соответствующим распределением вычислительных ресурсов. При этом для минимизации объемов пересылаемой информации первоначально может предусматриваться использование каждой ФС 10 одного из тех ВОН 6, которые входят в ее номинальный состав. ВОН 6, выигравший арбитраж, используя СКК 5, осуществляет использование необходимого оборудования через КПС 7, реализуя тем самым соответствующую конфигурацию КБО, и синхронизирует работу остальных ВОН 6. В процессе функционирования КБО его средствами, например, в соответствии с [9, 10], проводится мониторинг технического состояния и/или правильности функционирования комплекса в целом, отдельных его систем и компонентов. По истечении периода цикличности или при возникновении нештатной ситуации арбитраж повторяется, и с учетом фактического состояния бортового оборудования (отказов, сбоев, неправильного функционирования и пр.) выбирается новый ведущий ВОН 6 и новая доминирующая конфигурация КБО. При обеспечении равнодоступности (в смысле задержек реакции на запросы) вычислительных ресурсов для каждой ФС 10 может использоваться любой ВОН 6 независимо от его номинальной принадлежности к той или иной ФС. Априорная и текущая информация, необходимая для мониторинга текущего технического состояния систем КБО, накапливается, хранится и обрабатывается выделенными для этого ВОН 6 во взаимодействии с бортовой массовой памятью БМП 9.
Промышленная применимость
Заявленные способ управления избыточностью БИВС и устройство для его реализации промышленно применимы в вычислительной и контрольно-измерительной технике и наиболее успешно могут использоваться для создания отказоустойчивой БИВС в перспективных КБО подвижных объектов и комплексах автоматизированного управления функционированием производственных и энергетических объектов с целью обеспечения их отказоустойчивости и безопасности функционирования.
Источники информации
1. DO-297. Integrated modular avionics (IMA) development guidance and certification considerations. RTCA Inc., Washington, 2005.
2. Watkins С В. Integrated Modular Avionics: Managing the Allocation of Shared Intersystem Resources. 25th Digital Avionics Systems Conference (DASC), Portland, Oregon, October 2006.
3. Garside R and Pighetti J F. Integrating Modular Avionics: A New Role Emerges. 26th Digital Avionics Systems Conference (DASC), Dallas, Texas, October 2007.
4. Еремеев П.М., Беликов Ю.А. и др. Отказоустойчивая вычислительная система с аппаратно-программной реализацией функций отказоустойчивости и динамической реконфигурации. Патент RU 2455681 С1, опубликован 10.07.2012, Бюл. №19
5. Hainaut D. SCAlable & ReconfigurabLe Electronics plaTforms and Tools - Towards the next generation of Integrated Modular Avionics. An Introduction to SCARLETT. Aerodays 2011, Madrid, Spain, 2011.
6. Bernard S. and Garcia J.-P. Braking Systems with New IMA Generation. SAE International, 2011.
7. Буков B.H., Гнусин М.Ю., Дьяченко A.M., Шурман B.A., Яковлев Ю.В. Способ автоматического управления избыточностью неоднородной вычислительной системы и устройство для его реализации. Заявка на патент РФ 2015102223.
8. Боблак И.В., Буков В.Н., Евгенов А.В., Шурман В.А. Способ автоматического управления неоднородной избыточностью комплекса оборудования и устройство для его реализации. Заявка на патент РФ (в работе).
9. Аверьянов И.Н, Буков В.Н., Бронников A.M., Кушнир А.Л., Сельвесюк Н.И. Циклический способ локализации неконтролируемых множественных отказов технических систем в процессе их функционирования и устройство для его реализации, патент RU 2557441 С2, Бюл. №20 от 20.07.2015.
10. Boldyrev S., Chernyshov V., Nickolaev D., Ksenofontov V., Antonets C. Determination of functional efficiency of an airborne integrated navigation system for the purpose of reconfiguration of it in flight // Proc. of The 4th European conference for aero-space sciences, Saint Petersburg, Russia, Report 818-1245-1-RV, 2011.
Тензорезисторный датчик абсолютного давления на основе кни микроэлектромеханической системы
Устройство формирования пространственной информации
Способ автоматического управления неоднородной избыточностью комплекса оборудования и устройство для его реализации
Способ и устройство вычисления текущего значения углов атаки и скольжения летательного аппарата
Архитектура системы отказоустойчивой коммутации информации
Способ логического парного мониторинга неоднородных избыточных технических систем и устройство для его реализации
Самолет с системой дистанционного управления
Устройство коммуникационного интерфейса для сети spacewire
Коммуникационное устройство для гальванической развязки ds-линка
Устройство и способ формирования ds-кода
Циклический способ локализации неконтролируемых множественных отказов технических систем в процессе их функционирования и устройство для его реализации
Способ автоматического управления избыточностью неоднородной вычислительной системы и устройство для его реализации
Устройство формирования пространственной информации
Способ автоматического управления неоднородной избыточностью комплекса оборудования и устройство для его реализации
Способ передачи данных
Архитектура системы отказоустойчивой коммутации информации

