Результат интеллектуальной деятельности: Адаптивная бесплатформенная инерциальная курсовертикаль
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) путем организации непрерывной коррекции курсовертикали.
В бесплатформенной курсовертикали углы рыскания, крена и тангажа вычисляются по информации от датчиков угловых скоростей как отклонения от опорной системы координат, которая определяется перед взлетом.
Основным недостатком бесплатформенных систем является накопление ошибок, поэтому большое внимание уделяется точности используемых гироскопов. Данный недостаток устраняется путем коррекции ориентации по показаниям акселерометров, которые обеспечивают устранение накопления погрешности. При этом гироскопы снижают влияние динамики ЛА на точность. Такой способ коррекции называется маятниковым. Привлекательность маятниковой коррекции заключается в простоте, а также в исключении необходимости учитывать форму Земли, ее угловую скорость и местоположение ЛА. Недостатком является трудность выделения гравитационных составляющих из ускорений, измеряемых акселерометрами.
Разработке современных способов маятниковой коррекции, позволяющих выделять гравитационные составляющие из ускорений, измеряемых акселерометрами, уделяется большое внимание.
Известна Бесплатформенная инерциальная курсовертикаль, патент №2564379, МПК G01C 21/16, опубл. в бюл. № 27, 2015 г., принятая нами за прототип.
Бесплатформенная инерциальная курсовертикаль содержит трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса, вычислительный блок, блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, соединенные между собой соответствующим образом. Устройство обеспечивает адаптивную (маятниковую) коррекцию крена и тангажа БИНС, реализуемую посредством фильтра Калмана, в котором коэффициент усиления изменяется с учетом текущих значений модулей перегрузки и угловой скорости. Курс определяется при помощи магнитометрического датчика.
Недостаток известного устройства заключается в том, что при маневрировании ЛА оно не обеспечивает достаточной точности. Это может привести к возникновению значительных погрешностей в результате постоянного маневрирования высокоманевренных ЛА.
Целью заявляемого изобретения является повышение точности БИНС по углам крена и тангажа в режимах маневрирования летательного аппарата.
Поставленная цель достигается за счет того, что адаптивная бесплатформенная инерциальная курсовертикаль содержит трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса, вычислительный блок, блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, причем выходы трехкомпонентного блока датчиков угловых скоростей и трехкомпонентного блока датчиков линейных ускорений подключены соответственно к первым и вторым входам вычислительного блока, фильтра Калмана и блока формирования функций измерений, выход корректора курса подключен к третьему входу вычислительного блока, выход блока формирования матрицы направляющих косинусов подключен к четвертому входу вычислительного блока, выход блока формирования функций измерений подключен к третьему входу фильтра Калмана, а третий его вход соединен с первым выходом фильтра Калмана, дополнительно введены блок оптимизации, блок формирования кватернионов, блок формирования матрицы погрешностей системы, система воздушных сигналов и дифференцирующее устройство, при этом вход блока оптимизации соединен с первым выходом вычислительного блока, а первый и второй выходы подключены соответственно к третьему входу блока формирования матрицы погрешностей системы и к четвертому входу блока формирования функций измерений, первый, второй входы блока формирования кватернионов соединены соответственно со вторым выходом фильтра Калмана и с выходом трехкомпонентного блока датчиков угловых скоростей, третий вход соединен со вторым выходом вычислительного блока, а выход подключен к входу блока формирования матрицы направляющих косинусов, первый и второй входы блока формирования матрицы погрешностей системы соединены соответственно с выходами трехкомпонентного блока датчиков угловых скоростей и трехкомпонентного блока датчиков линейных ускорений, а выход подключен к четвертому входу фильтра Калмана, первый и второй выходы системы воздушных сигналов подключены соответственно к пятому входу блока формирования функций измерений и к входу дифференцирующего устройства, выход дифференцирующего устройства подключен к шестому входу блока формирования функций измерений, третий, четвертый и пятый выходы вычислительного блока являются выходами адаптивной бесплатформенной инерциальной курсовертикали по сигналам курса, тангажа и крена.
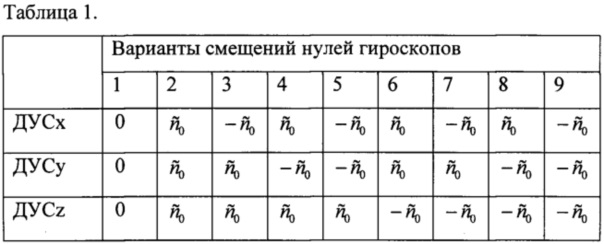
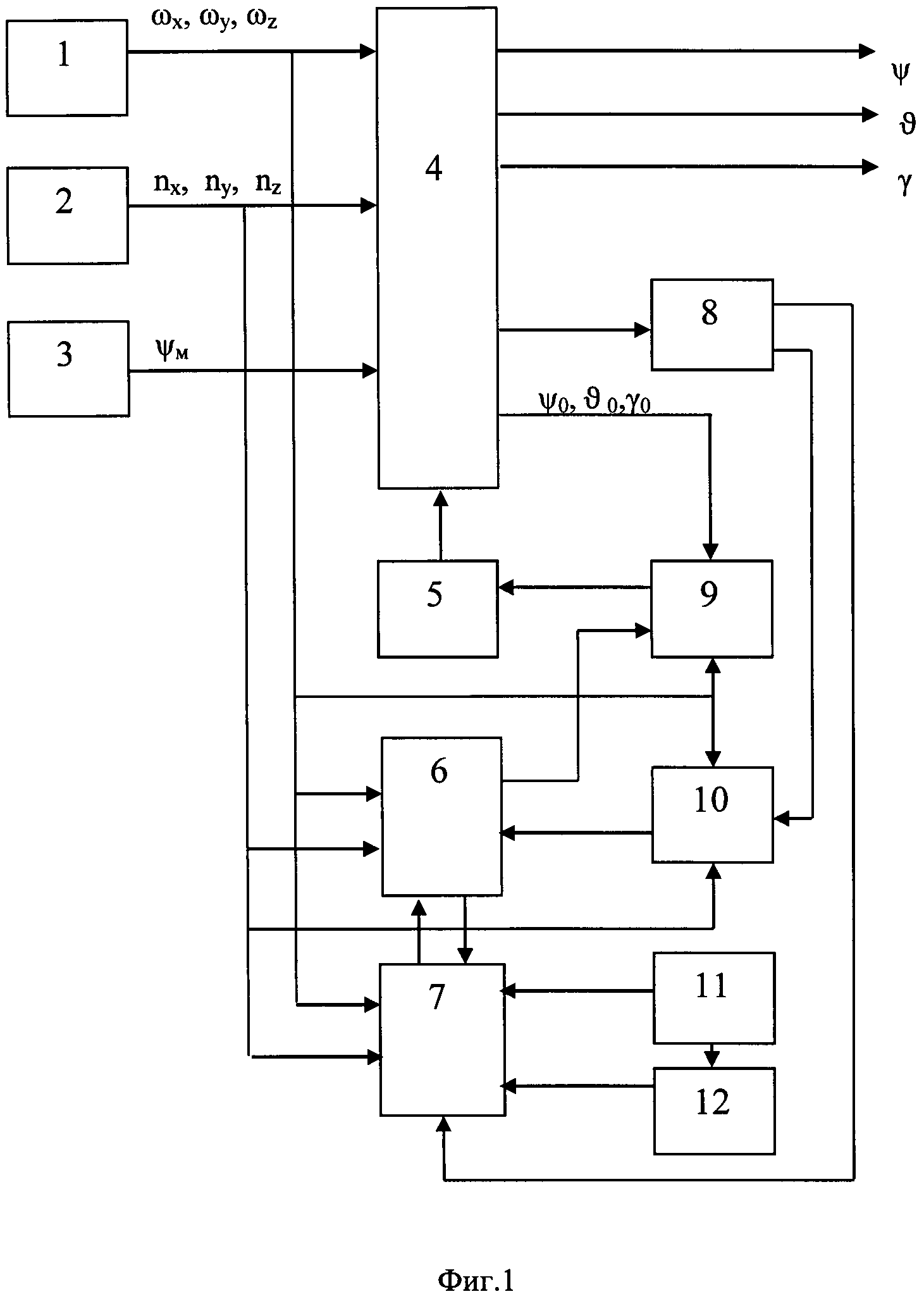
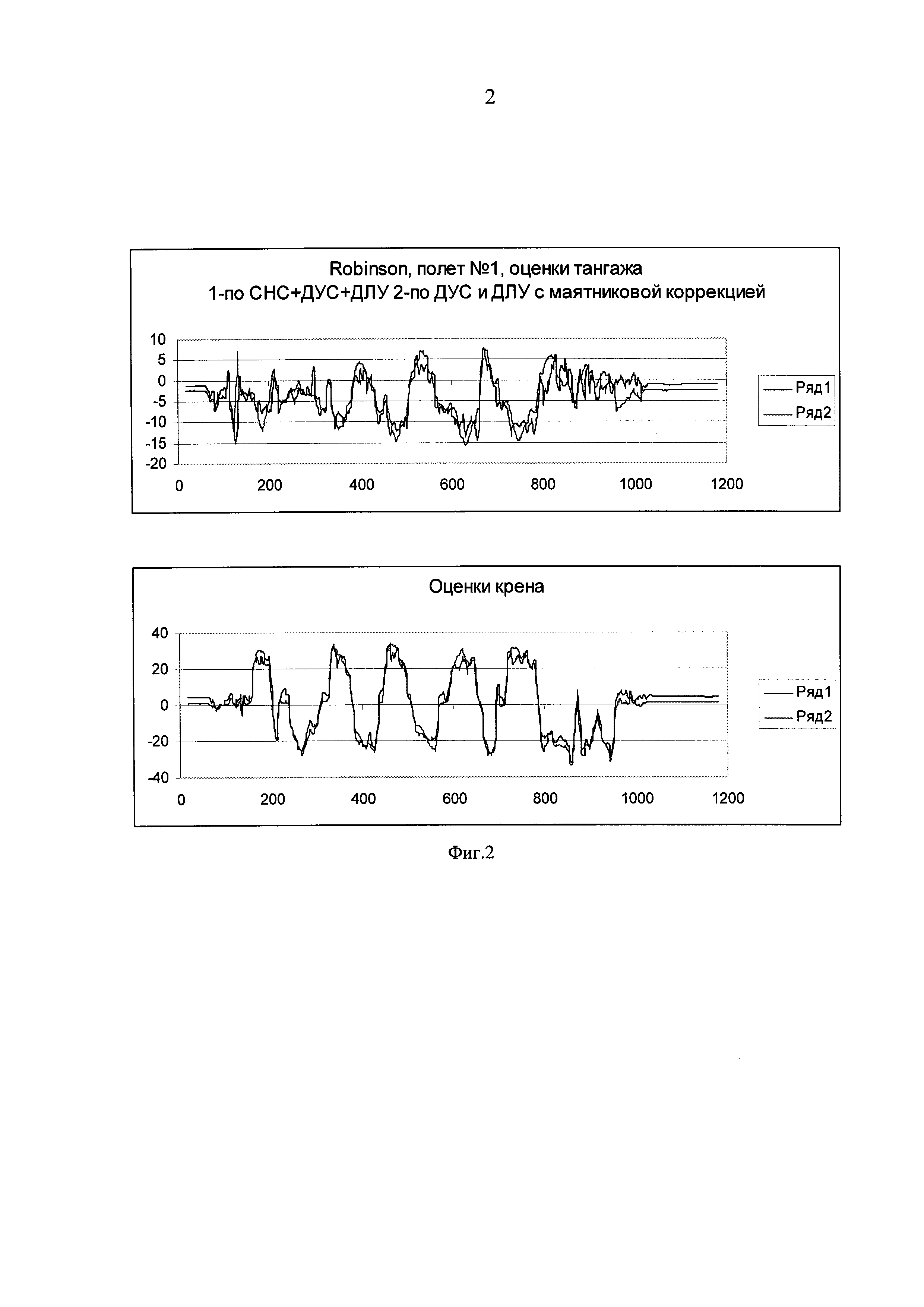
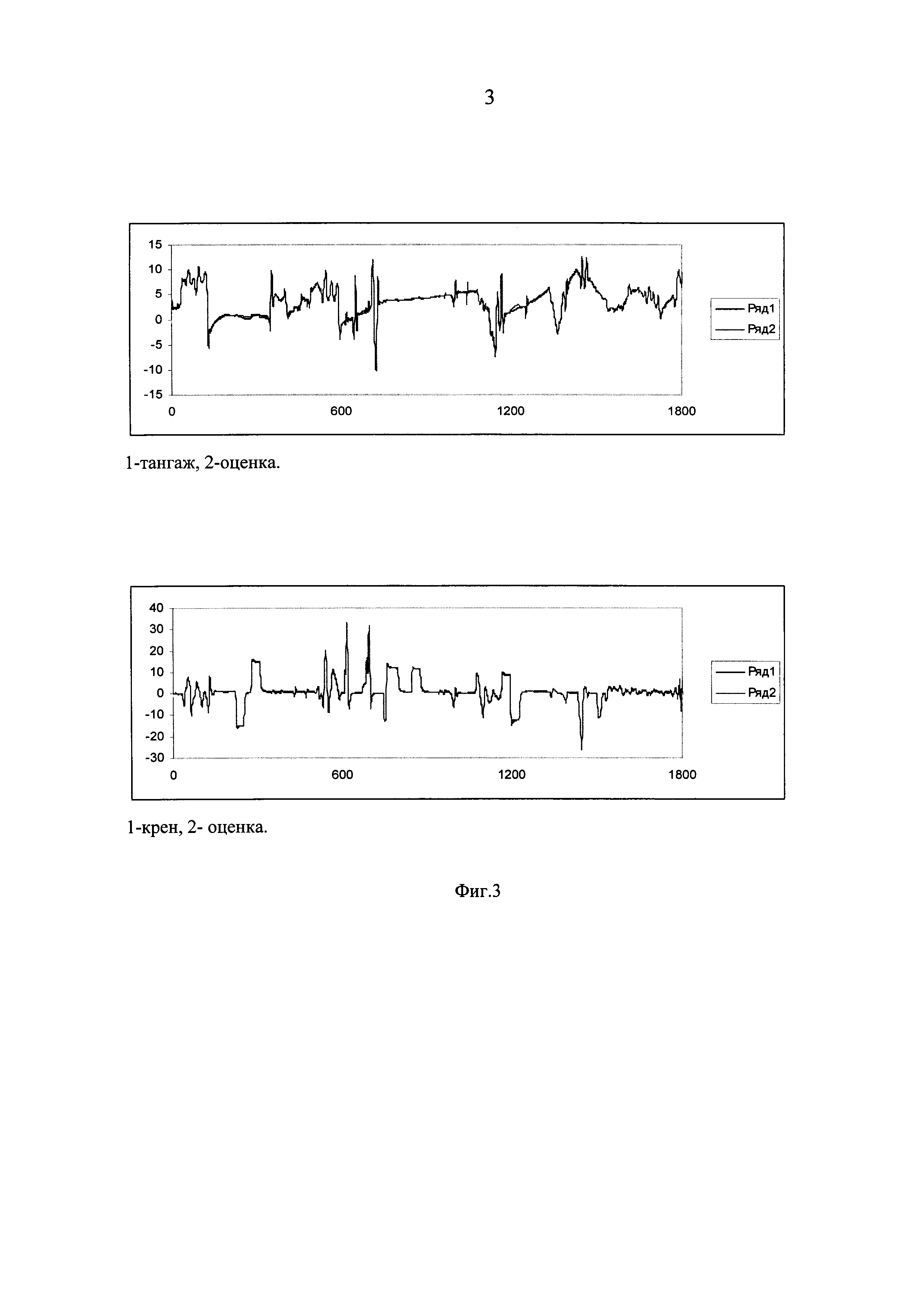
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема заявляемой курсовертикали, на фиг. 2 и на фиг. 3 графически представлены сравнительные результаты моделирования прототипа и заявленного устройства.
Адаптивная бесплатформенная инерциальная курсовертикаль содержит трехкомпонентный блок 1 датчиков угловых скоростей, трехкомпонентный блок 2 датчиков линейных ускорений, трехкомпонентный магнитометрический датчик 3, вычислительный блок 4, блок 5 формирования матрицы направляющих косинусов, фильтр 6 Калмана, блок 7 формирования функций измерений, блок 8 оптимизации, блок 9 формирования кватернионов, блок 10 формирования матрицы погрешностей системы, систему 11 воздушных сигналов и дифференцирующее устройство 12.
Суть работы устройства излагается ниже.
Фильтр 6 Калмана строится с учетом структуры измерений кажущихся ускорений. Вектор состояния, кроме крена и тангажа, включает скорость полета относительно Земли.

i - номер дискретного момента времени.
Изменение крена и тангажа описывается с помощью кватерниона ориентации в блоке 9, для которого угол рыскания принимается равным нулю.
 .
.
Расчет кватерниона по вектору  , необходимый для определения его начального значения и уточнения на каждом шаге коррекции, выполняется с помощью следующих соотношений.
, необходимый для определения его начального значения и уточнения на каждом шаге коррекции, выполняется с помощью следующих соотношений.
с1=cos(ψ/2), ψ=0, с2=cos(ϑ/2), с3=cos(γ/2),
s1=sin(ψ/2), s2=sin(ϑ/2), s3=sin(γ/2),
q1=c1c2c3-s1s2s3, q2=c1c2s3+s1s2c3, q3=c1s2s3+s1c2c3, q1=c1s2c3-s1c2s3.
Вычисление кватерниона сопровождается его нормированием.
 ,
,  ,
,  ,
,  ,
,  .
.
После вычисления исходный кватернион q заменяют на нормированный кватернион  .
.
По кватерниону ориентации определяется матрица поворота А(3,3) в блоке 6 формирования матрицы направляющих косинусов.
 , а(1,2)=2(q2q3+q4q1), а(1,3)=2(q4q2-q3q1), a(2,1)=2(q2q3-q1q4),
, а(1,2)=2(q2q3+q4q1), а(1,3)=2(q4q2-q3q1), a(2,1)=2(q2q3-q1q4),  , а(2,3)=2(q3q4+q2q1), a(3,1)=2(q4q2+q3q1), a(3,1)=2(q3q4-q2q1),
, а(2,3)=2(q3q4+q2q1), a(3,1)=2(q4q2+q3q1), a(3,1)=2(q3q4-q2q1),  .
.
Расчет крена и тангажа по матрице поворота выполняется с помощью соотношений ϑ=arcsin(a(1,2)), γ=-acrtg(a(3,2)/a(2,2)) в вычислительном блоке 4.
При счислении ориентации используется кватернион угловых скоростей.
 ,
,
где ωx, ωy, ωz - измерения, поступающие с блока 1 датчиков угловых скоростей.
Определение текущего кватерниона ориентации выполняется с помощью одношагового алгоритма, имеющего вид.
 ,
,
 ,
,
где Δt - шаг дискретизации измерений по времени,  - операция произведения кватернионов.
- операция произведения кватернионов.
 ,
,
r1=q1qω1-q2qω2-q3qω3-q4qω4,
r2=q1qω2-q2qω1-q3qω4-q4qω3,
r3=q1qω3-q2qω4-q3qω1-q4qω2,
r4=q1qω4-q2qω3-q3qω2-q4qω1.
Уравнения объекта имеют вид

Vi+1=Vi+w3i,
wi=[w1i w2i w3i],  , Q=diag(q1,q3,q3).
, Q=diag(q1,q3,q3).
Здесь  обозначена процедура прогноза крена и тангажа путем пересчета в соответствующий кватернион ориентации, его интегрирования на шаге дискретизации измерений и обратного пересчета с помощью матрицы поворота.
обозначена процедура прогноза крена и тангажа путем пересчета в соответствующий кватернион ориентации, его интегрирования на шаге дискретизации измерений и обратного пересчета с помощью матрицы поворота.
Вектор наблюдения содержит перегрузки по трем связанным осям ЛА.

Основополагающей в рассматриваемом методе коррекции является зависимость ковариационной матрицы ошибок наблюдений перегрузок от модуля перегрузки, точнее от абсолютного значения его отклонения от единицы.

Для этого в модели наблюдений (3) ковариационная матрица ошибок наблюдений принимается в виде

Здесь дисперсии ошибок наблюдения di зависят от текущего измерения модуля перегрузки и являются функцией n*.

Обозначим  ,
,  априорное и апостериорное нормальные распределения для i-го шага, где
априорное и апостериорное нормальные распределения для i-го шага, где
xi=М[xi],  ,
,  ,
,  ,
,
Алгоритм оценивания представляется фильтром первого порядка приближения, выполняющим рекуррентное вычисление апостериорного распределения  по априорному распределению
по априорному распределению 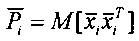 и текущему измерению Zi,
и текущему измерению Zi,
Здесь  - оценка вектора наблюдений по априорному распределению вектора состояния.
- оценка вектора наблюдений по априорному распределению вектора состояния.
В силу нелинейности задачи прогноз ковариационной матрицы выполняется упрощенно, без учета ее изменения динамикой объекта. При этом ковариационная матрица возмущений Q учитывает приближенность прогноза. Точные соотношения для измерений перегрузок следуют из дифференциальных уравнений динамики полета.

Степень влияния слагаемых в правых частях (8) зависит от режима полета. На режиме прямолинейного горизонтального полета с постоянной скоростью имеет место nx=sin(ϑ), ny=cos(ϑ)cos(γ), nz=-cos(ϑ)sin(γ). Данные соотношения используются в простейших вариантах коррекции, когда ускорения, создаваемые ЛА, значительно меньше гравитационных.
Слагаемые (Vzωy-ωzVy)/g, (Vxωz-ωxVz)/g, (Vyωx-ωyVx)/g обусловлены появлением кориолисовых сил и имеют значимость при разворотах ЛА.
Слагаемые  ,
,  ,
,  имеют значимость при появлении линейных ускорений по связанным осям ЛА.
имеют значимость при появлении линейных ускорений по связанным осям ЛА.
В рамках вектора состояния (1) учитывают наиболее значимые члены в (8). При относительно небольших углах атаки и скольжения скорость направлена в основном по строительной оси.

Тогда (8) представляется в упрощенном виде

В отличие от прототипа, в первом уравнении (10) дополнительно учитывают слагаемое  .
.
Приближенность (10) и допущения (9) снижают точность учета составляющих кажущегося ускорения (8). Однако строгого выполнения (10) и (9) не требуется, в чем и состоит преимущество исходной идеи прототипа. Суть в том, что всякое отклонение модуля перегрузки от единицы и всякая неточность (10) учитываются снижением доверия к наблюдениям перегрузок путем увеличения дисперсий в ковариационной матрице Ri в блоке 7 формирования функций измерений. При этом снижается интенсивность коррекции, и, следовательно, снижаются ее ошибки.
На режимах разгона и торможения значительный вклад в изменение кажущегося ускорения вносит производная скорости.
Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот

 ,
,  ,
,  .
.
Здесь Т - постоянная времени фильтра нижних частот.
Из рассмотрения Якобиана Hi в (7) следует, что оценивание скорости ЛА происходит при выполнении разворотов, когда присутствуют одна или обе угловые скорости ωz, ωy. При этом слагаемые ωxV/g, -ωyV/g в соотношениях для ny, nz (10) обеспечивают оценивание крена. Из первого уравнения в (10) следует, что слагаемое  в выражении для
в выражении для  влияет на оценивание тангажа.
влияет на оценивание тангажа.
На участках полета при взлете и посадке, когда скорость изменяется наиболее интенсивно, а ЛА не выполняет разворотов, скорость не оценивается, но при этом желательно учитывать  для повышения точности оценивания тангажа.
для повышения точности оценивания тангажа.
С этой целью предлагается использовать измерение скорости системой 11 воздушных сигналов (СВС). СВС формирует измерение истинной воздушной скорости VTA.
Современные СВС обладают достаточно высокой точностью. Выделение производной  выполняют аналогично выражению (11) с помощью фильтра нижних частот в дифференцирующем устройстве 12:
выполняют аналогично выражению (11) с помощью фильтра нижних частот в дифференцирующем устройстве 12:

Заметим, что при этом постоянные рассогласования между земной и истинной воздушной скоростями не вносят ошибок в определение производной. Динамические ошибки измерения VTA на малых высотах взлета и посадки незначительны. Шумовые погрешности СВС сглаживаются фильтром. Поэтому с достаточной точностью правомерно положить  .
.
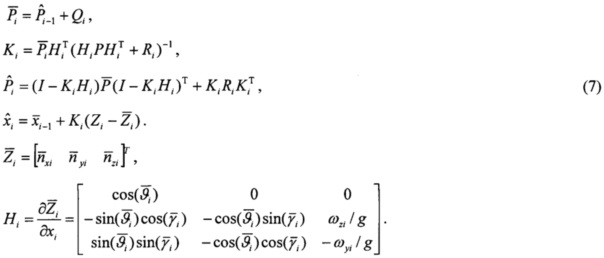
Определение оптимальных коэффициентов алгоритма курсовертикали выполняют с учетом уровня погрешностей датчиков. Путем анализа ошибок инерциальных датчиков с помощью спектральной плотности мощности и дисперсии Алана выделяют шумы квантования, случайное блуждание (дрейф), нестабильность смещения нуля (фликкер шум), случайное блуждание (дрейф) скорости, мультипликативную систематическую погрешность и синусоидальный шум.
С учетом того, что основной вклад в ошибки ориентации бесплатформенной курсовертикали вносят смещения нулей гироскопов, настройку коэффициентов фильтра 6 Калмана выполняют на множестве обучающих последовательностей, формируемых для набора сочетаний знаков смещений.
С другой стороны, поскольку свойства маятниковой коррекции в той или иной степени всегда зависят от вида движения ЛА, важным является использование данных, близких к реальным полетам.
Для оптимизации коэффициентов фильтра Калмана использовались процессы изменения параметров полетов, сформированных с помощью авиасимулятора, имитирующего все этапы полета от взлета до посадки с учетом маневрирования ЛА и дополнительных возмущений в виде турбулентности.
Коэффициенты фильтра 6 оптимизируют в блоке 8 оптимизации следующим образом. Для каждого полета формируется девять обучающих последовательностей.
Варианты знаков смещений нулей гироскопов представлены в таблице 1, где с0 - абсолютная величина смещения. Величина с0 задается с учетом класса точности располагаемых гироскопов.
Всего в алгоритме курсовертикали присутствует шесть коэффициентов, подлежащих настройке: q1, q2, q3 - диагональные элементы ковариационной матрицы возмущений Q, и a=d1,  ,
,  - коэффициенты нелинейной функции d=d(n*), определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
- коэффициенты нелинейной функции d=d(n*), определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
Критерием качества J1 назначают взвешенную среднеквадратическую ошибку ориентации по крену и тангажу, усредненную по времени и по множеству всех девяти обучающих последовательностей.

Здесь  - среднеквадратическая ошибка оценивания тангажа:
- среднеквадратическая ошибка оценивания тангажа:  - среднеквадратическая ошибка оценивания крена: αϑ=0.5 и αγ=0.5 - весовые коэффициенты; J={a,b,k,q1,q2,q3} - множество из шести искомых коэффициентов алгоритма (7).
- среднеквадратическая ошибка оценивания крена: αϑ=0.5 и αγ=0.5 - весовые коэффициенты; J={a,b,k,q1,q2,q3} - множество из шести искомых коэффициентов алгоритма (7).
Идентификацию турбулентности, в смысле выявления ее наличия, выполняют по величине среднеквадратичного отклонения n* на скользящем интервале небольшой длины порядка 1-2 секунд. При превышении некоторого заданного порога σ(n*)≥Δn принимают решение о наличии турбулентности.
Оптимизацию коэффициентов алгоритма курсовертикали осуществляют в три этапа:
1. Численная минимизация критерия качества minJ1 и определение коэффициентов {a1,b1,k1,q11,q21,q31} для полетов в спокойной атмосфере, σ(n*)<Δn.
2. Численная минимизация критерия качества minJ1 и определение коэффициентов {a2,b2,k2,ql2,q22,q32} для полетов в условиях турбулентности, σ(n*)≥Δn.
3. Определение процедуры вычисления дисперсий d,q1,q2,q3, удовлетворяющей с достаточной точностью полетам как в спокойной атмосфере, так и в турбулентности. Наиболее просто данная процедура реализуется с помощью линейной интерполяции коэффициентов фильтра по результатам этапов 1, 2 и текущим значениям σ(n*), n*.
Для исследования использовались данные полетов легкого самолета на авиасимуляторе. Как видно из результатов исследования (фиг. 2 и фиг. 3) в режиме маневрирования, ошибки определения углов крена и тангажа у предложенного устройства существенно уменьшились.
Техническим результатом использования изобретения является повышение точности и обеспечение непрерывной коррекции углов тангажа и крена в условиях маневрирования в полете. Изобретение позволяет применить датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа, так как из-за непрерывной коррекции ошибки не накапливаются. Устройство не требует начальной выставки и обладает свойством самовыставки в течение нескольких секунд.
Заявляемое устройство является реализуемым и может быть использовано на всех типах ЛА. В качестве датчиков угловых скоростей могут быть использованы микромеханические гироскопические датчики, при этом фильтр Калмана, блок формирования матрицы погрешностей системы и блок формирования функций измерений могут быть реализованы на стандартных элементах вычислительной техники.
Адаптивная бесплатформенная инерциальная курсовертикаль, содержащая трехкомпонентный блок датчиков угловых скоростей, трехкомпонентный блок датчиков линейных ускорений, корректор курса, вычислительный блок, блок формирования матрицы направляющих косинусов, фильтр Калмана и блок формирования функций измерений, причем выходы трехкомпонентного блока датчиков угловых скоростей и трехкомпонентного блока датчиков линейных ускорений подключены соответственно к первым и вторым входам вычислительного блока, фильтра Калмана и блока формирования функций измерений, выход корректора курса подключен к третьему входу вычислительного блока, выход блока формирования матрицы направляющих косинусов подключен к четвертому входу вычислительного блока, выход блока формирования функций измерений подключен к третьему входу фильтра Калмана, а третий его вход соединен с первым выходом фильтра Калмана, отличающаяся тем, что в нее дополнительно введены блок оптимизации, блок формирования кватернионов, блок формирования матрицы погрешностей системы, система воздушных сигналов и дифференцирующее устройство, при этом вход блока оптимизации соединен с первым выходом вычислительного блока, а первый и второй выходы подключены соответственно к третьему входу блока формирования матрицы погрешностей системы и к четвертому входу блока формирования функций измерений, первый, второй входы блока формирования кватернионов соединены соответственно со вторым выходом фильтра Калмана и с выходом трехкомпонентного блока датчиков угловых скоростей, третий вход соединен со вторым выходом вычислительного блока, а выход подключен к входу блока формирования матрицы направляющих косинусов, первый и второй входы блока формирования матрицы погрешностей системы соединены соответственно с выходами трехкомпонентного блока датчиков угловых скоростей и трехкомпонентного блока датчиков линейных ускорений, а выход подключен к четвертому входу фильтра Калмана, первый и второй выходы системы воздушных сигналов подключены соответственно к пятому входу блока формирования функций измерений и к входу дифференцирующего устройства, выход дифференцирующего устройства подключен к шестому входу блока формирования функций измерений, третий, четвертый и пятый выходы вычислительного блока являются выходами адаптивной бесплатформенной инерциальной курсовертикали по сигналам курса, тангажа и крена.
Комплексный способ навигации летательных аппаратов
Способ определения углов пространственной ориентации
Малогабаритная адаптивная курсовертикаль
Способ определения центра масс летательного аппарата и устройство для его осуществления
Способ коррекции бесплатформенной инерциальной навигационной системы
Комплексный способ навигации летательных аппаратов
Способ определения коэффициентов калибровки интегрированного блока датчиков
Способ помощи в навигации для уточнения траектории летательного аппарата
Способ определения углов ориентации ла на вертикальных траекториях полета
Электромеханический привод поступательного действия
Способ контроля исправности интегрированных блоков датчиков
Способ лечения и профилактики желудочно-кишечных заболеваний у животных
Боковая ручка управления (варианты)

