Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ КОМПЛЕКСНОЙ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ОТНОСИТЕЛЬНО ПЛОСКОСТИ ГОРИЗОНТА
Вид РИД
Изобретение
Изобретение относится к области измерительной техники, в частности к способам определения угловой ориентации объекта, и может быть использовано при решении задач автономной навигации оперативных работников или мобильных роботов в закрытых пространствах при выполнении разведывательных или аварийно-спасательных работ в чрезвычайных ситуациях.
Угловая ориентация объекта определяется параметрами ориентации, к которым могут быть причислены углы Эйлера-Крылова, параметры Родриго-Гамильтона, а также направляющие косинусы (Ишлинский А.Ю. Гироскопы, ориентация и инерциальная навигация. - М.: Наука, 1976. - 672 с.) - [1].
Известен способ определения параметров ориентации объекта при помощи бесплатформенной системы ориентации, построенной на трех датчиках угловой скорости, обрабатывая сигналы которых получают параметры ориентации (Анучин О.Н. Интегрированные системы ориентации и навигации для морских подвижных объектов / О.Н. Анучин, Г.И. Емельянцев. - Санкт-Петербург: ГНЦ РФ ЦНИИ Электроприбор, 2003. - 390 с.) - [2]. К достоинствам данных систем можно отнести автономность и возможность выдачи информации с высокой частотой. К основным недостаткам данных систем причисляют наличие нарастающей со временем погрешности и зависимость точности от начальной выставки.
Известен способ определения параметров навигации (патент RU №2338160, опубл. 10.11.2008 г.) - [3], в котором для достижения высоких показателей точности навигации осуществляют комплексирование сигналов спутниковой и инерциальной навигационных систем. Путем сравнения показаний этих систем определяют скорректированные параметры навигации и величины ошибок значений параметров, вырабатываемых инерциальной навигационной системой. Затем осуществляют передачу вычисленных по этим ошибкам величин поправок в инерциальную навигационную систему для коррекции вырабатываемых ею в последующие моменты времени параметров навигации. Недостатки интегрированного способа инерциально-спутниковой навигации заключаются в том, что этим способом не обеспечивается полная автономность решения задачи персональной навигации. Кроме того, интегрированные персональные навигаторы, работающие по способу комплексной обработки информации, отличаются относительной сложностью, ненадежностью, дороговизной и необходимостью реализации алгоритмов вычисления навигационных невязок (алгоритмов RAJM-технологий).
Для сравнительного анализа с заявляемым изобретением взят способ по патенту US 5422817 А, опубл. 06.06.1995 г. [4], заключающийся в том, что сигналы акселерометров и датчиков угловых скоростей используются для вычисления углов ориентации путем расчета матрицы направляющих косинусов между связанной и навигационной системами координат. При этом происходит компенсация погрешностей сигналов ускорений акселерометров (американский термин «sculling»), обусловленная тем, что связанная система координат имеет угловую скорость по отношению к навигационной системе, после чего происходит пересчет ускорений из связанной системы координат в навигационную систему и их интегрирование с целью определения текущих скоростей и приращений координат.
У указанного способа имеется традиционный недостаток любых инерциальных систем навигации, заключающийся в том, что ошибки в определении ориентации определяются точностью датчиков угловых скоростей и акселерометров, к тому же ошибки в определении координат растут с течением времени пропорционально скорости дрейфа датчиков угловых скоростей. Этот недостаток приводит к тому, что через некоторое время автономной работы вычисленная на борту носителя навигационная система будет отличаться от истинной навигационной системы на большие углы, что фактически ведет к неработоспособности способа навигации.
Техническая проблема заключается в накапливающейся со временем погрешности определения угловой ориентации объекта указанными способами из-за наличия собственных уходов блока инерциальных измерителей (БИИ).
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении точности определения углов наклона БИИ комплексной системы угловой ориентации (СУО) относительно плоскости горизонта, использующейся для целей персональной автономной навигации. Способ обеспечивает полное определение углов наклона БИИ на основе информации, полученной посредством лучевого сканирования опорной поверхности, что обеспечивает в дальнейшем автономность определения координат объекта и возможность обнуления накапливающихся погрешностей измерений углов крена и тангажа БИИ.
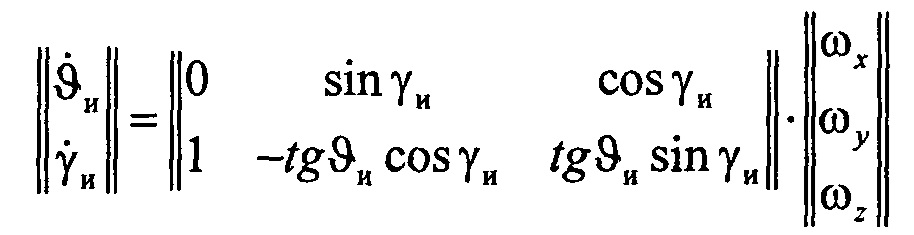
Технический результат достигается тем, что в способе определении углов наклона БИИ комплексной СУО относительно плоскости горизонта определяют начальные значения углов тангажа ϑи(t) и крена γи(t) при t=t0 по сигналам акселерометров, вычисляют угловые скорости  и
и  по сигналам датчиков угловых скоростей ωx, ωy, ωz по формуле
по сигналам датчиков угловых скоростей ωx, ωy, ωz по формуле
и, интегрируя которые по времени t, получают значения углов ϑи и γи, новым является то, что:
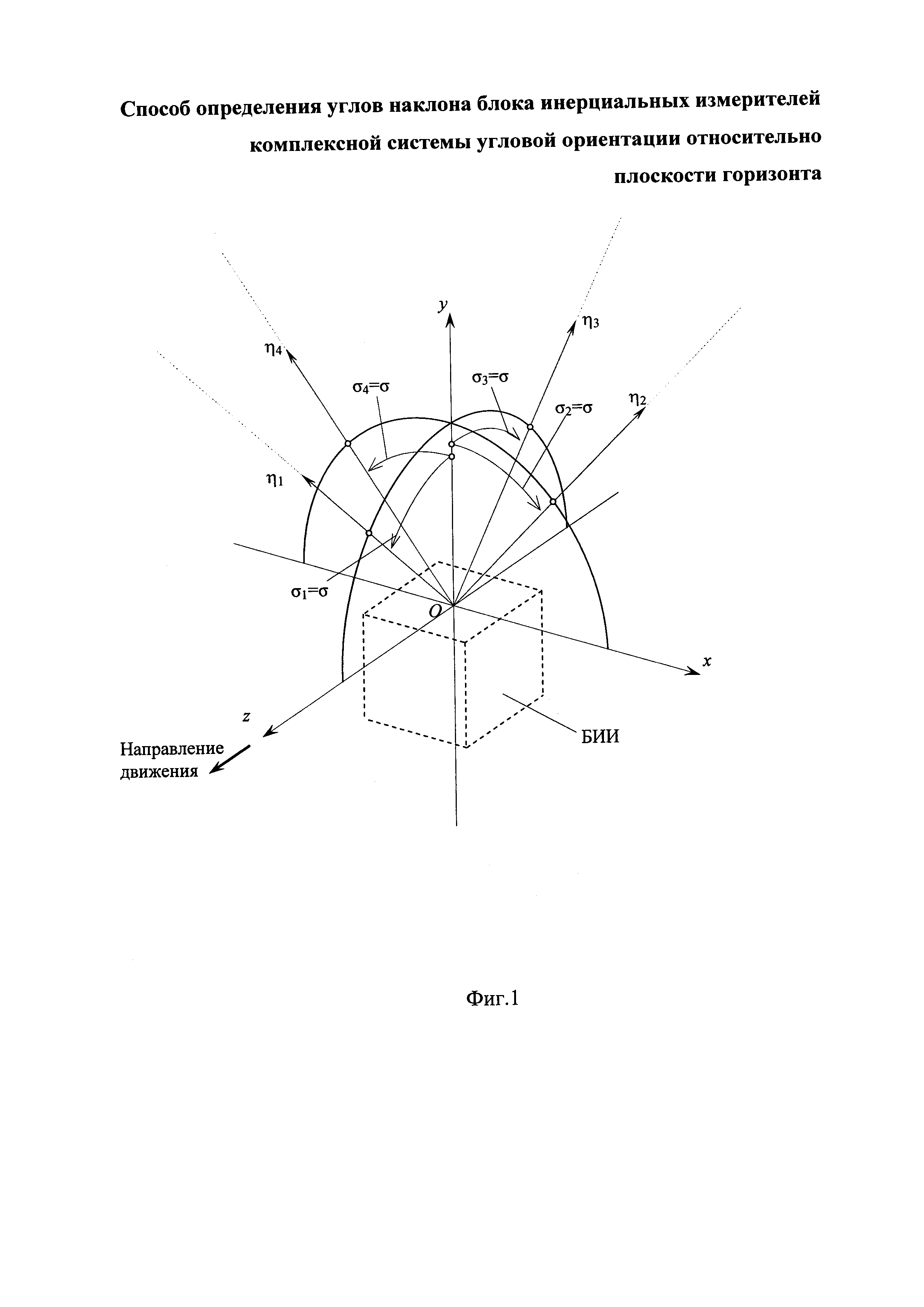
измеряют расстояния Li,  , n≥3 от блока инерциальных измерителей до опорной горизонтальной поверхности с помощью дальномеров, измерительные оси ηi которых сходятся в точке О начала отсчета расстояний Li и образуют ребра пирамиды, составляющие с осью у системы координат, связанной с блоком инерциальных измерителей, углы σi, обеспечивая контакт измерительных осей дальномеров с опорной поверхностью, при этом ось η1 находится в первом квадранте плоскости yOz связанной системы координат, плоскости yOηi составляют с плоскостью yOz двугранные углы μi, а нумерация осей ηi и отсчет углов μi происходит против часовой стрелки при взгляде со стороны оси y,
, n≥3 от блока инерциальных измерителей до опорной горизонтальной поверхности с помощью дальномеров, измерительные оси ηi которых сходятся в точке О начала отсчета расстояний Li и образуют ребра пирамиды, составляющие с осью у системы координат, связанной с блоком инерциальных измерителей, углы σi, обеспечивая контакт измерительных осей дальномеров с опорной поверхностью, при этом ось η1 находится в первом квадранте плоскости yOz связанной системы координат, плоскости yOηi составляют с плоскостью yOz двугранные углы μi, а нумерация осей ηi и отсчет углов μi происходит против часовой стрелки при взгляде со стороны оси y,
вычисляют углы опорного тангажа α и опорного крена β отклонения оси у связанной системы координат от нормали к опорной поверхности путем решения системы уравнений

где  ,
,
 ,
,
 ,
,
h - кратчайшее расстояние от точки О до опорной поверхности,
а углы ϑ и γ наклона блока инерциальных измерителей комплексной системы угловой ориентации относительно плоскости горизонта определяют путем комплексирования сигналов блока инерциальных измерителей  и
и  , пропорциональных углам ϑи и γи, и сигналов дальномеров
, пропорциональных углам ϑи и γи, и сигналов дальномеров  и
и  , пропорциональных углам α и β, по формулам
, пропорциональных углам α и β, по формулам
 ,
,
 ,
,
где  ,
,  - сигналы с выхода блока комплексирования, пропорциональные углу тангажа ϑ и крена γ соответственно, F1(s) и F2(s) - передаточные функции апериодических звеньев, постоянные времени которых выбирают из условия максимального подавления погрешностей измерения и вычисления углов α, β при минимальном искажении погрешностей измерения и вычисления углов ϑи, γи.
- сигналы с выхода блока комплексирования, пропорциональные углу тангажа ϑ и крена γ соответственно, F1(s) и F2(s) - передаточные функции апериодических звеньев, постоянные времени которых выбирают из условия максимального подавления погрешностей измерения и вычисления углов α, β при минимальном искажении погрешностей измерения и вычисления углов ϑи, γи.
Реализация способа определения углов наклона БИИ комплексной СУО относительно плоскости горизонта выполнена с помощью устройства определения углов наклона БИИ комплексной СУО относительно плоскости горизонта для частного случая схемы расположения дальномеров на БИИ при n=4, σ1=σ2=σ3=σ4=σ,  ,
,  .
.
Сущность изобретения поясняется на фиг. 1 - 4, где
фиг. 1 - схема расположения измерительных осей η1, η2, η3, η4 дальномеров относительно связанной системы координат Oxyz,
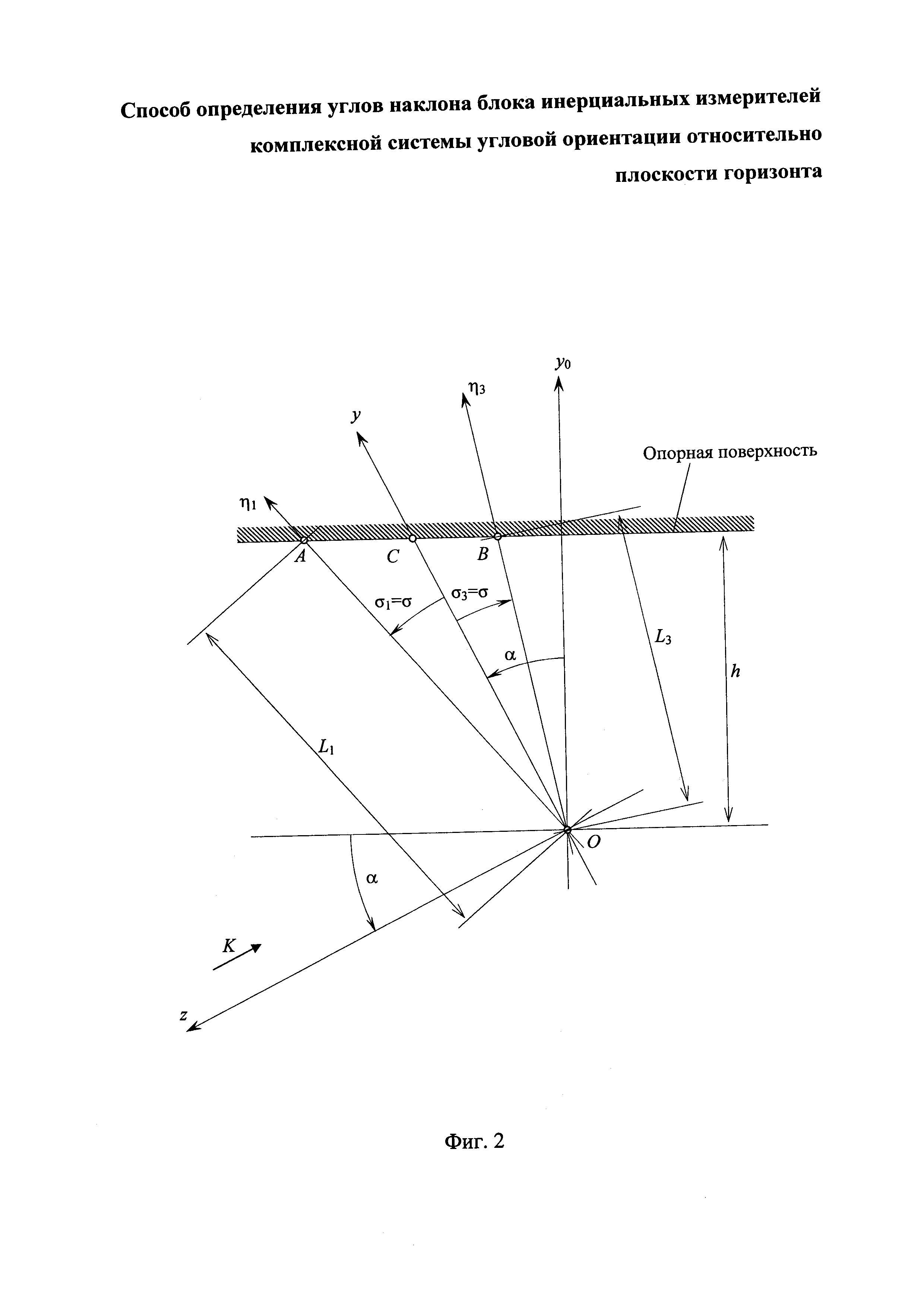
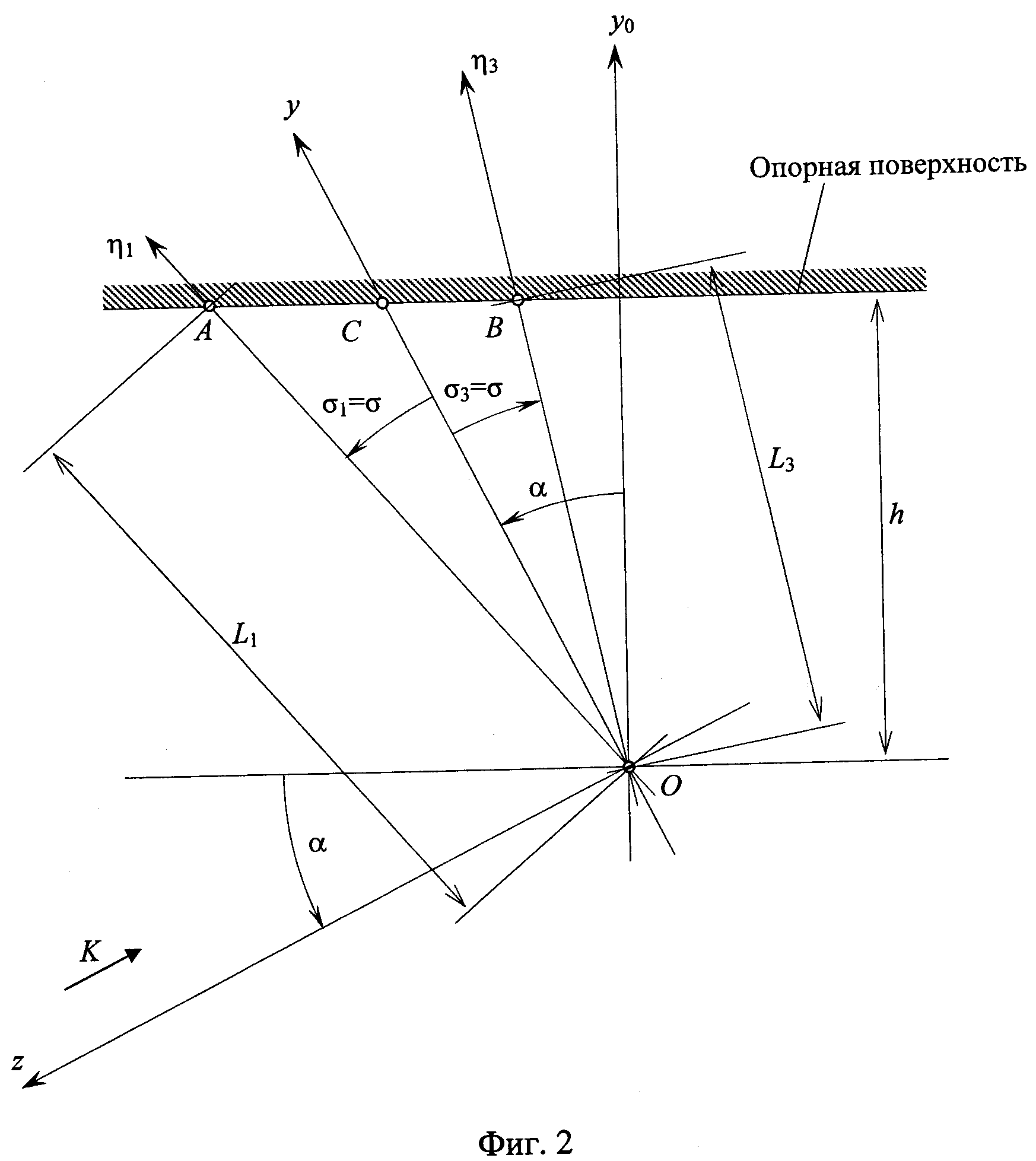
фиг. 2 - схема измерения угла опорного тангажа α при β=0,
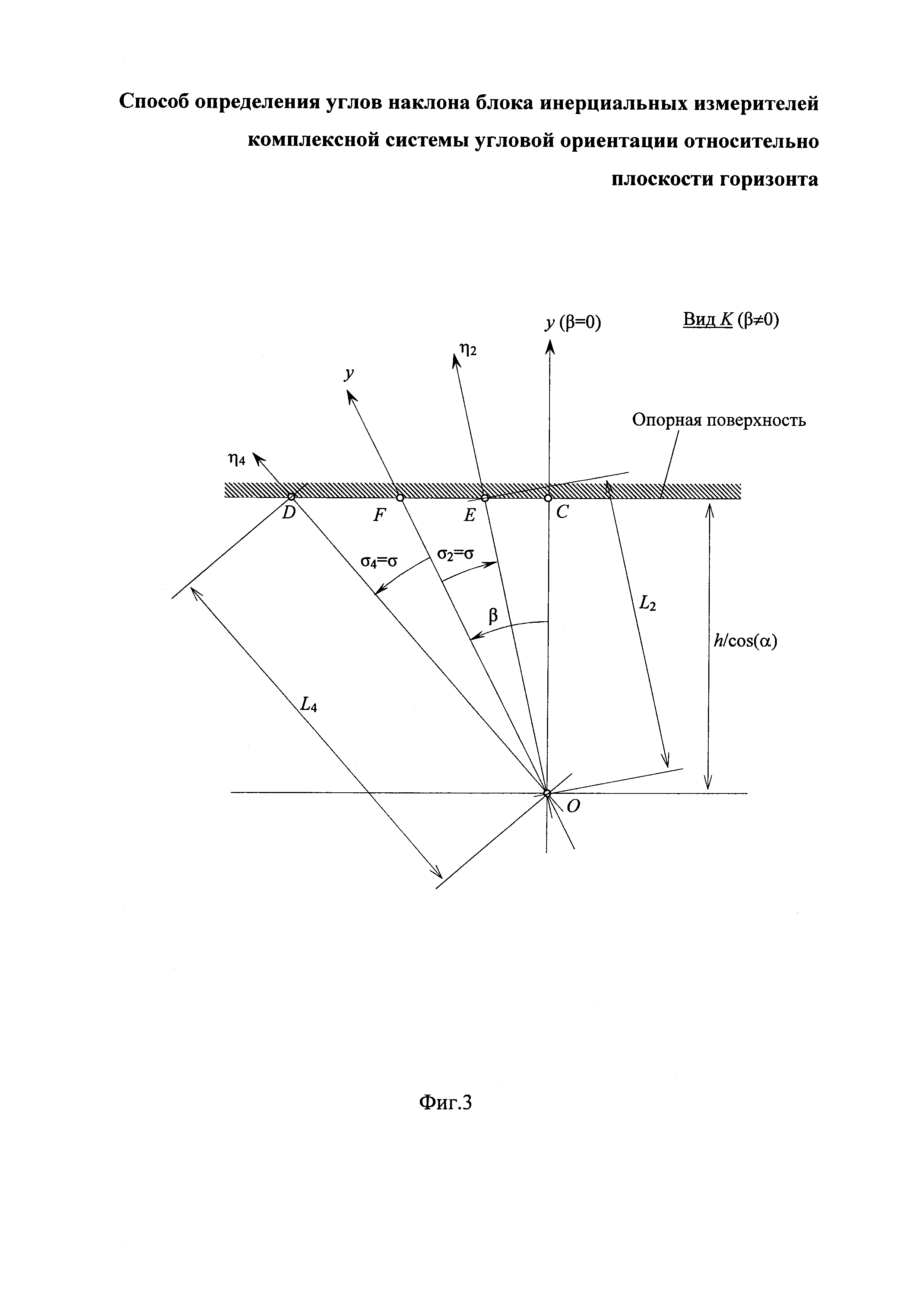
фиг. 3 - схема измерения угла опорного крена β при α≠0,
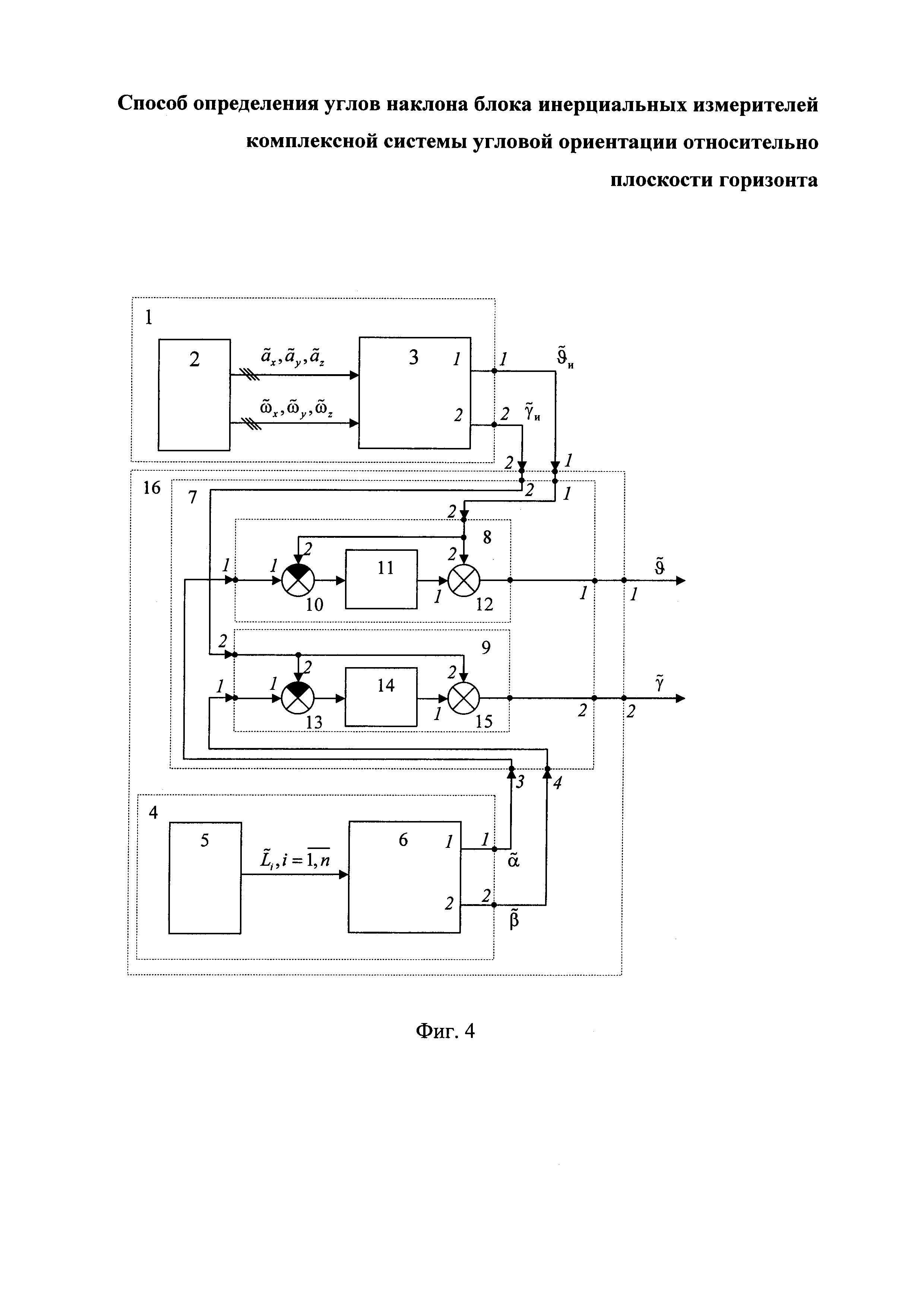
фиг. 4 - схема комплексной СУО.
Здесь:
О - точка схождения измерительных осей дальномеров;
xyz - связанная система координат;
η1, η2, η3, η4 - измерительные оси дальномеров;
σ1, σ2, σ3, σ4 - углы между осью y связанной системы координат и осями η1, η2, η3, η4 соответственно;
y0 - нормаль к опорной поверхности;
α - угол между осью z связанной системы координат и опорной поверхностью (угол опорного тангажа);
β - угол между плоскостями y0Z и yz (угол опорного крена);
Li,  - расстояния между точкой О и опорной поверхностью, измеряемые дальномерами;
- расстояния между точкой О и опорной поверхностью, измеряемые дальномерами;
h - кратчайшее расстояние от точки О до опорной поверхности;
А, В - точки пересечения осей η1 и η3 с опорной поверхностью при β=0;
С - точка пересечения оси y с опорной поверхностью при β=0;
D, E - точки пересечения осей η2 и η4 с опорной поверхностью;
F - точка пересечения оси y с опорной поверхностью;
1 - инерциальная СУО;
2 - БИИ;
3 - вычислитель инерциальной СУО;
4 - дальномерная СУО;
5 - блок дальномеров;
6 - вычислитель дальномерной СУО;
7 - блок компенсации;
8, 9 - схемы компенсации;
10, 12, 13, 15 - сумматоры;
11, 14 - низкочастотные фильтры;
16 - блок комплексирования;
 ,
,  ,
,  - сигналы акселерометров, пропорциональные проекциям вектора
- сигналы акселерометров, пропорциональные проекциям вектора  на оси связанной системы координат;
на оси связанной системы координат;
 ,
,  ,
,  - сигналы датчиков угловых скоростей, пропорциональные проекциям вектора
- сигналы датчиков угловых скоростей, пропорциональные проекциям вектора  на оси связанной системы координат;
на оси связанной системы координат;
 ,
,  - сигналы с выходов инерциальной СУО, пропорциональные углам тангажа ϑи и углу крена γи соответственно;
- сигналы с выходов инерциальной СУО, пропорциональные углам тангажа ϑи и углу крена γи соответственно;
 ,
,  ,
,  ,
,  - сигналы с выходов блока дальномеров, пропорциональные расстояниям L1, L2, L3, L4 соответственно;
- сигналы с выходов блока дальномеров, пропорциональные расстояниям L1, L2, L3, L4 соответственно;
 ,
,  - сигналы с выходов дальномерной СУО, пропорциональные углам опорного тангажа α и опорного крена β соответственно;
- сигналы с выходов дальномерной СУО, пропорциональные углам опорного тангажа α и опорного крена β соответственно;
 ,
,  - сигналы с выходов блока комплексирования, пропорциональные углам тангажа ϑ и крена γ соответственно.
- сигналы с выходов блока комплексирования, пропорциональные углам тангажа ϑ и крена γ соответственно.
Устройство определения углов наклона БИИ комплексной СУО относительно плоскости горизонта (фиг. 4) содержит инерциальную СУО 1 и блок комплексирования 16, первый и второй входы которого соединены с первым и вторым выходами инерциальной СУО 1 соответственно. Инерциальная СУО 1 состоит из БИИ 2, включающего в себя три акселерометра и три датчика угловых скоростей, последовательно соединенного с вычислителем 3. Блок комплексирования 16 включает в себя дальномерную СУО 4 и блок компенсации 7. Первый и второй входы блока компенсации 7 соединены соответственно с первым и вторым входами блока комплексирования 16, а третий и четвертый входы соединены соответственно с первым и вторым выходами дальномерной СУО 4.
Дальномерная СУО 4 состоит из блока дальномеров 5, последовательно соединенного с вычислителем 6, первый и второй выходы которого соответственно являются первым и вторым выходами дальномерной СУО 4.
Блок компенсации 7 состоит из двух структурно одинаковых схем компенсации 8 и 9, каждая из которых содержит два сумматора и низкочастотный фильтр (Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. - 280 с.) - [5].
Первый вход сумматора 10 является первым входом схемы компенсации 8 и соединен с третьим входом блока компенсации 7, а второй, инвертирующий, вход является вторым входом схемы компенсации 8 и соединен с первым входом блока компенсации 7. Выход сумматора 10 соединен с входом низкочастотного фильтра 11, выход которого соединен с первым входом сумматора 12. Второй вход сумматора 12 является вторым входом схемы компенсации 8 и соединен с первым входом блока компенсации 7, а выход является выходом схемы компенсации 8, первым выходом блока компенсации 7 и первым выходом блока комплексирования 16.
Первый вход сумматора 13 является первым входом схемы компенсации 9 и соединен с четвертым входом блока компенсации 7, а второй, инвертирующий, вход является вторым входом схемы компенсации 9 и соединен со вторым входом блока компенсации 7. Выход сумматора 13 соединен с входом низкочастотного фильтра 14, выход которого соединен с первым входом сумматора 15. Второй вход сумматора 15 является вторым входом схемы компенсации 9 и соединен с четвертым входом блока компенсации 7, а выход является выходом схемы компенсации 9, вторым выходом блока компенсации 7 и вторым выходом блока комплексирования 16.
Способ определения углов наклона БИИ комплексной СУО относительно плоскости горизонта заключается в следующем.
БИИ 2 инерциальной СУО 1 измеряет проекции вектора кажущегося ускорения ax, ay, az и вектора угловой скорости ωx, ωy, ωz на оси связанной с БИИ 2 системы координат Oxyz. Сигналы  ,
,  ,
,  с выхода акселерометров БИИ 2 и сигналы
с выхода акселерометров БИИ 2 и сигналы  ,
,  ,
,  с выхода датчиков угловых скоростей БИИ 2 поступают в вычислитель 3. Сигналы акселерометров используются для определения начальных значений углов тангажа ϑи(t) и крена γи(t) при t=t0, а сигналы датчиков угловых скоростей ωx, ωy, ωz используются для преобразования по формуле
с выхода датчиков угловых скоростей БИИ 2 поступают в вычислитель 3. Сигналы акселерометров используются для определения начальных значений углов тангажа ϑи(t) и крена γи(t) при t=t0, а сигналы датчиков угловых скоростей ωx, ωy, ωz используются для преобразования по формуле
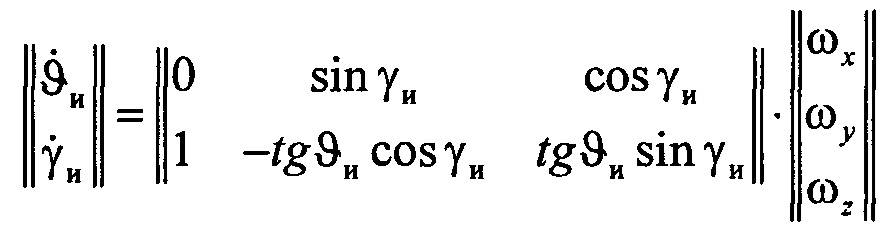
в угловые скорости  и
и  , интегрируя которые по времени t, получают значения углов ϑи и γи. Вычислитель 3 формирует на своих выходах сигналы, оценивающие угол крена γи (сигнал
, интегрируя которые по времени t, получают значения углов ϑи и γи. Вычислитель 3 формирует на своих выходах сигналы, оценивающие угол крена γи (сигнал  на выходе 1) и угол тангажа ϑи (сигнал
на выходе 1) и угол тангажа ϑи (сигнал  на выходе 2) и являющиеся выходными сигналами инерциальной СУО 1.
на выходе 2) и являющиеся выходными сигналами инерциальной СУО 1.
Блок дальномеров 5 дальномерной СУО 4 измеряет расстояния L1, L2, L3, L4 от полюса О связанной системы координат до точек пересечения (точки А, Б фиг. 2, точки D, Е фиг. 3) измерительных осей дальномеров с плоскостью опорной поверхности. Измеряемые расстояния-векторы (отрезки OA=L1, OE=L2, OB=L3, OD=L4) в проекциях на оси связанной системы координат представлены выражениями

Проекции векторов (2) на нормаль к опорной поверхности равны одному и тому же значению - расстоянию h от точки О до опорной поверхности. Для получения матрицы направляющих косинусов перехода от связанной системы координат к системе координат x0y0z0, ось y0 которой перпендикулярна плоскости опорной поверхности, а плоскость x0z0 параллельна опорной поверхности, связанная система координат развернута из исходного положения, в котором ось y совпадает с осью y0, сначала вокруг оси x на угол опорного тангажа α (фиг. 2), а затем вокруг оси z на угол опорного крена β (фиг. 3). Для определения проекций векторов (2) на нормаль к опорной поверхности y0 используется вторая строка матрицы направляющих косинусов  .
.
Система уравнений (1) примет вид
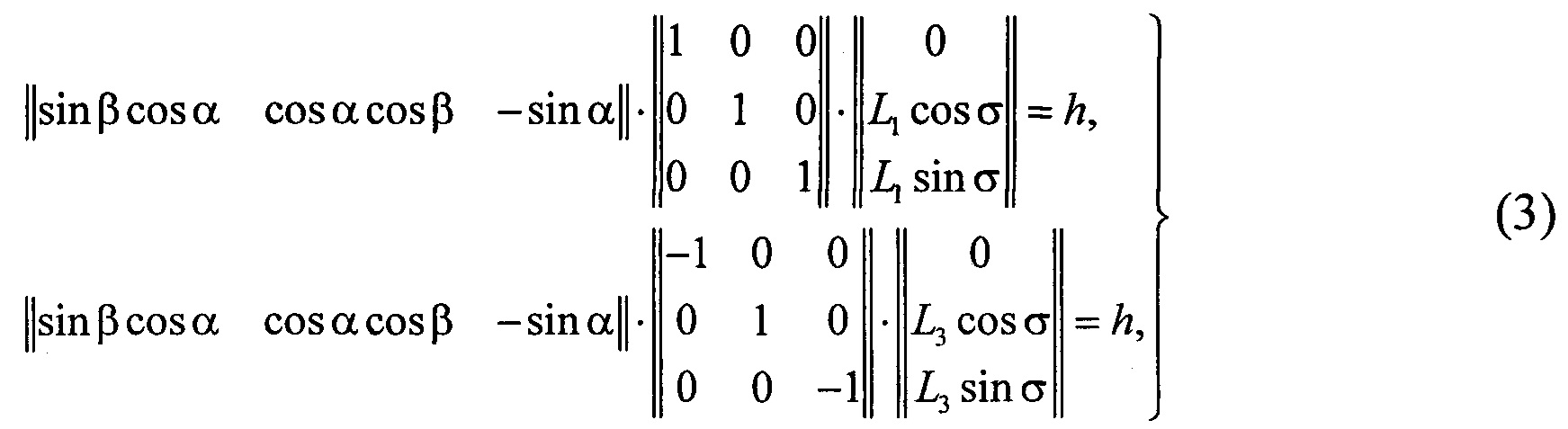
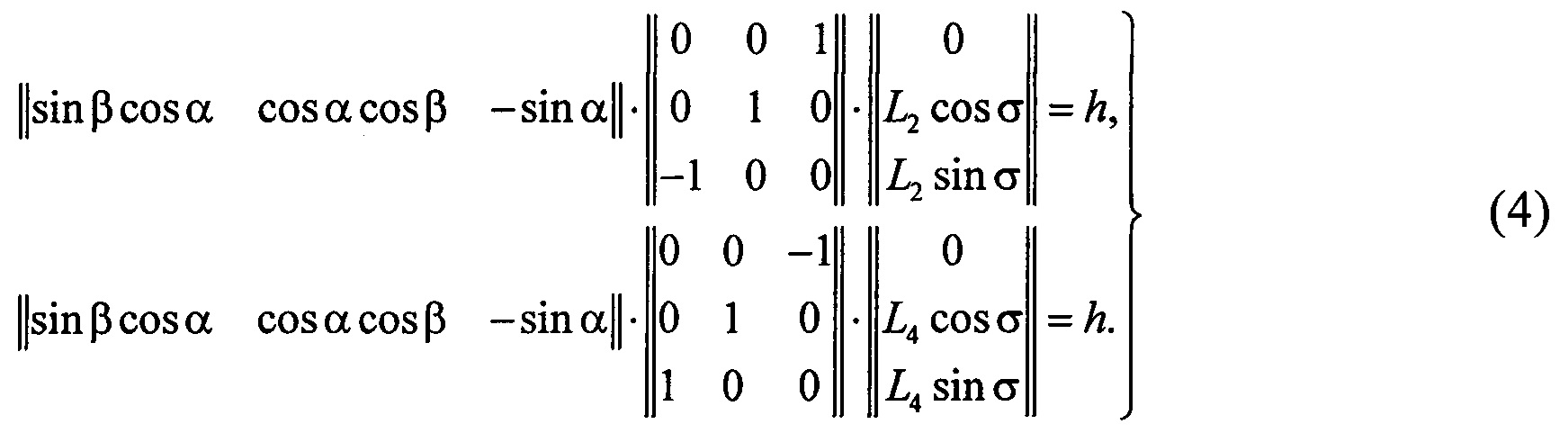
После выполнения операций с матрицами уравнения (3) и (4) преобразуются к виду
При решении уравнений (6) относительно угла β получена формула

При решении уравнений (5) относительно угла α получена формула

Выражение для cosβ найдено по формуле

Окончательное выражение для определения угла α получено подстановкой (9) в (8)

Сигналы  ,
,  ,
,  ,
,  с выхода блока дальномеров 4 поступают на вычислитель 6, который формирует на своих выходах сигналы, оценивающие угол опорного крена β (сигнал
с выхода блока дальномеров 4 поступают на вычислитель 6, который формирует на своих выходах сигналы, оценивающие угол опорного крена β (сигнал  на выходе 2) и угол опорного тангажа α (сигнал
на выходе 2) и угол опорного тангажа α (сигнал  на выходе 1) и являющиеся выходными сигналами дальномерной СУО 4.
на выходе 1) и являющиеся выходными сигналами дальномерной СУО 4.
На вход 1 сумматора 10 поступает сигнал с входа 3 блока компенсации 7, а на инвертирующий вход 2 - сигнал  с входа 1 блока компенсации 7. Разностный сигнал
с входа 1 блока компенсации 7. Разностный сигнал  поступает на вход низкочастотного фильтра 11, с выхода которого сигнал
поступает на вход низкочастотного фильтра 11, с выхода которого сигнал  поступает на вход 1 сумматора 12. На вход 2 сумматора 12 поступает сигнал с входа 1 блока компенсации 7. Выходной сигнал сумматора 12
поступает на вход 1 сумматора 12. На вход 2 сумматора 12 поступает сигнал с входа 1 блока компенсации 7. Выходной сигнал сумматора 12  является первым из двух выходных сигналов блока комплексирования 16.
является первым из двух выходных сигналов блока комплексирования 16.
На вход 1 сумматора 13 поступает сигнал с входа 4 блока компенсации 7, а на вход 2 - сигнал  с входа 2 блока компенсации 7. На вход 2 сумматора 15 поступает сигнал с входа 2 блока компенсации 7. Разностный сигнал
с входа 2 блока компенсации 7. На вход 2 сумматора 15 поступает сигнал с входа 2 блока компенсации 7. Разностный сигнал  поступает на вход низкочастотного фильтра 14, с выхода которого сигнал
поступает на вход низкочастотного фильтра 14, с выхода которого сигнал  поступает на вход 1 сумматора 15. Выходной сигнал сумматора 15
поступает на вход 1 сумматора 15. Выходной сигнал сумматора 15  является вторым из двух выходных сигналов блока комплексирования 16.
является вторым из двух выходных сигналов блока комплексирования 16.
Выходные сигналы блока комплексирования 16 вычисляются по формулам

Выходные сигналы  ,
,  инерциальной СУО 1 содержат погрешности εϑ, εγ
инерциальной СУО 1 содержат погрешности εϑ, εγ

Выходные сигналы  ,
,  дальномерной СУО 4 содержат погрешности εα, εβ
дальномерной СУО 4 содержат погрешности εα, εβ

Скорректированные сигналы на выходе блока комплексирования 16 имеют вид

Результирующие погрешности измерения тангажа  и крена
и крена  равны
равны

Низкочастотные фильтры 11 и 14 построены как апериодические звенья с передаточными функциями  ,
,  , постоянные времени Т1, Т2 которых определены из условия максимального подавления погрешностей измерения и вычисления углов α, β при минимальном искажении погрешностей измерения и вычисления углов ϑи, γи. Таким образом, благодаря блоку комплексирования 16 выходные сигналы (14) содержат значения измеряемых углов ϑ и γ, не искаженные низкочастотными фильтрами 11 и 14, и погрешности (15), существенно ослабленные низкочастотными фильтрами 11 и 16 по сравнению с исходными погрешностями εϑ, εγ, εα, εβ.
, постоянные времени Т1, Т2 которых определены из условия максимального подавления погрешностей измерения и вычисления углов α, β при минимальном искажении погрешностей измерения и вычисления углов ϑи, γи. Таким образом, благодаря блоку комплексирования 16 выходные сигналы (14) содержат значения измеряемых углов ϑ и γ, не искаженные низкочастотными фильтрами 11 и 14, и погрешности (15), существенно ослабленные низкочастотными фильтрами 11 и 16 по сравнению с исходными погрешностями εϑ, εγ, εα, εβ.
Реализация устройства определения углов наклона БИИ комплексной СУО относительно плоскости горизонта.
В качестве БИИ могут быть использованы инерциальные модули, выполненные по MEMS-технологии, производимые фирмой Analog Devices. В качестве дальномеров могут быть применены миниатюрные лазерные или ультразвуковые дальномеры, например дальномеры фирмы FLIR. Реализация электронных узлов при современном уровне миниатюризации не составляет труда.
Применение найденного решения в пешеходной навигационной системе обеспечивает повышение точности определения углов наклона БИИ относительно плоскости горизонта, что в свою очередь существенно повышает точность определения координат местоположения оперативного работника внутри здания.
Список литературы
1. Ишлинский А.Ю. Гироскопы, ориентация и инерциальная навигация. - М.: Наука, 1976. - 672 с.
2. Анучин О.Н. Интегрированные системы ориентации и навигации для морских подвижных объектов / О.Н. Анучин, Г.И. Емельянцев. - Санкт-Петербург: ГНЦ РФ ЦНИИ Электроприбор, 2003. - 390 с.
3. Патент RU №2338160, опубл. 10.11.2008 г.
4. Патент US 5422817 А, опубл. 06.06.1995 г.
5. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. - 280 с.


















Синхронный электродвигатель с магнитной редукцией
Устройство для увлажнения воздуха
Поворотный электромагнит
Магнитный редуктор
Злаковый батончик для питания работающих с соединениями свинца
Злаковый батончик для питания работающих с вредными соединениями мышьяка и фосфора
Гаситель крутильных колебаний
Вентильный электропривод
Турбореактивный двухконтурный двигатель
Магнитный редуктор
Стартовая система предупреждения критических режимов одновинтового вертолета
Устройство определения углов наклона блока инерциальных измерителей комплексной системы угловой ориентации относительно плоскости горизонта

