Результат интеллектуальной деятельности: СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕКУПЕРАТИВНО-РЕОСТАТНАЯ
Вид РИД
Изобретение
Область техники
Предлагаемое изобретение относится к автоматическим рекуперативно-реостатным системам, предназначенным для использования в системах автоматического управления рекуперативно-реостатным торможением тяговых электро-подвижных составов постоянного тока (ТЭПС), оборудованных электромашинными возбудителями или статическими преобразователями, а также для управления энергетическими ресурсами электровозов.
Уровень техники
Из уровня техники известно устройство независимого возбуждения тяговых двигателей электропоездов постоянного тока (см. RU 88865, кл. H02K 1/00, публ. 2009 г.).
Известное устройство независимого возбуждения тяговых двигателей электропоездов постоянного тока с рекуперативно-реостатным торможением содержит две группы тяговых двигателей, обмотки возбуждения, разбитые на две группы, и контакторы.
Изобретательский замысел данного устройства состоит в том, что тяговые двигатели электропоезда постоянного тока в процессе торможения переключаются с последовательно-параллельного соединения на последовательное соединение, а именно, по мере уменьшения скорости вращения тяговых двигателей вследствие торможения электропоезда якоря двигателей переключаются на последовательное соединение.
Данный технический прием способен повысить эффективность рекуперативно-реостатного торможения, однако, безотказность работы такой системы сомнительна, поскольку в цепи группы якорей тяговых двигателей возможно возникновение короткого замыкания, а прием постоянного включения групп обмоток возбуждения на последовательное соединение между собой и двумя управляемыми выпрямителями посредством отключения контактора при каждом торможении электропоезда требует проведения дополнительных диагностических процедур в целях снижения степени риска отказа системы.
Из уровня техники известно устройство для регулирования скорости электроподвижного состава (см. RU 62359, кл. B60L 7/22, публ. 2007 г.).
Известное устройство для регулирования скорости электроподвижного состава содержит источник питания, последовательно соединенные якорные обмотки первого и второго тяговых электродвигателей постоянного тока, последовательно соединенные обмотки возбуждения первого, второго тяговых электродвигателей постоянного тока и контактор.
Недостатком известного устройства можно считать ограниченную область применения, исключающую установку данного устройства регулировки скорости на электропоезда, на которых помимо аналогового оборудования установлено цифровое оборудование, отсутствие гибкой цифровой структуры управления, а также отсутствие достаточного запаса функциональности для будущих режимов работы данного типа оборудования.
Наиболее близким аналогом предлагаемого изобретения является реостатно-рекуперативная система торможения электроподвижного состава (см. RU 2268172, кл. B60L 7/22, публ. 2006 г.).
Известная реостатно-рекуперативная система торможения содержит источник питания, два тяговых электродвигателя постоянного тока, резистор рекуперации, диод и два контактора.
Недостатком известной системы торможения является невозможность ее корректного использования совместно с аналоговым оборудованием систем управления торможением электропоездов, недостаточный диапазон скоростей для реализации режима электрического торможения, а также невозможность одновременной (параллельной обработки) получаемых информационных сигналов и преобразование их в управляющие сигналы, в связи с чем, у данной системы торможения весьма низкий уровень функциональных возможностей.
Раскрытие изобретения
Технической задачей (проблемой) предлагаемого изобретения является создание унифицированной системы торможения автоматической рекуперативно-реостатной тяговых электро-подвижных составов постоянного тока, имеющей высокотехнологичную цифровую структуру управления, а также достаточный запас функциональности, обеспечивающий возможность совместной работы с любыми современными системами, в том числе и с будущими постоянно совершенствующимися, осуществляющими режим работы, свойственный данному типу оборудования.
Техническим результатом предлагаемого изобретения, который объективно проявляется в ходе его использования, является повышение точности обрабатываемых информационных сигналов, улучшение выходных данных и сигналов управления, возможность работы электрического тормоза во всем диапазоне скоростей движения тягового электро-подвижного состава постоянного тока (вплоть до полной остановки), что повышает безопасность движения железнодорожных перевозок.
Указанный технический результат достигается благодаря тому, что система торможения автоматическая рекуперативно-реостатная содержит источник питания, два или более тяговых электродвигателя постоянного тока, взаимодействующие с блоком диодов, предназначенным для перехода в режим рекуперативного торможения и с блоком резисторов, подключающимся в режиме реостатного торможения, и программируемую логическую интегральную схему (ПЛИС), параллельно принимающую и обрабатывающую, проходящие через аналого-цифровые преобразователи сигналы от датчиков, контролирующих значение уровня тока, протекающего в обмотке возбуждения и в обмотке якоря тяговых электродвигателей постоянного тока и от датчика ЭДС и цифровые сигналы, поступающие от системы управления электровозом, проходящие через входной фильтр, устраняющий помехи в цепях управления, а также формирующую выходные управляющие цифровые сигналы, поступающие в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией с подключаемыми устройствами и в цифро-аналоговые преобразователи для взаимодействия с аналоговыми системами.
По одному из частных вариантов исполнения изобретения сформированный в программируемой логической интегральной схеме (ПЛИС) выходной сигнал перед поступлением в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, поступает в формирователь ШИМ.
По одному из предпочтительных вариантов исполнения изобретения сформированный в программируемой логической интегральной схеме (ПЛИС) выходной сигнал поступает в блок управления дополнительными функциями.
Предлагаемая автоматическая рекуперативно-реостатная система торможения предназначена для использования в системе автоматического управления рекуперативно-реостатным торможением тяговых электро-подвижных составов постоянного тока (ТЭПС), оборудованных электромашинными возбудителями или статическими преобразователями.
Кроме того, предлагаемая автоматическая рекуперативно-реостатная система торможения предназначена для управления энергетическими ресурсами тяговых электроподвижных составов постоянного тока (ТЭПС).
Предлагаемая автоматическая рекуперативно-реостатная система способна заменить устаревшее оборудование, а также имеет возможность установки на тяговые электроподвижные составы постоянного тока (ТЭПС), не оборудованные системами рекуперативного и/или реостатного торможения.
Предлагаемая автоматическая рекуперативно-реостатная система превосходит все характеристики оборудования предыдущего поколения и имеет в своем составе высокотехнологичную цифровую структуру управления с достаточным потенциалом функциональности для создающихся режимов работы данного типа оборудования.
Основной функциональной особенностью данной системы является возможность реализации узлов в параллельной (одновременной) цифровой приемке и обработки поступающих информационных сигналов в программируемую логическую интегральную схему (ПЛИС).
Программируемая логическая интегральная схема (ПЛИС), являющаяся частью системы торможения, имеет возможность параллельно принимать и обрабатывать сигналы от датчиков, контролирующих значение уровня тока, и от датчика напряжения, а также цифровые сигналы, поступающие от системы управления электровозом.
Помимо этого, программируемая логическая интегральная схема (ПЛИС) одновременно формирует выходные управляющие цифровые сигналы, которые поступают в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией с подключаемыми устройствами, в цифро-аналоговые преобразователи для взаимодействия с аналоговыми системами, а также в блок управления дополнительными функциями.
В следствии того, что в системах управления рекуперативно-реостатным торможением основной тип входящей и выходящей информации представлен в аналоговом виде, в предлагаемой системе используются многоканальные аналого-цифровые и цифро-аналоговые преобразователи сигналов, что обеспечивает возможность работы с любыми системами.
Краткое описание чертежей
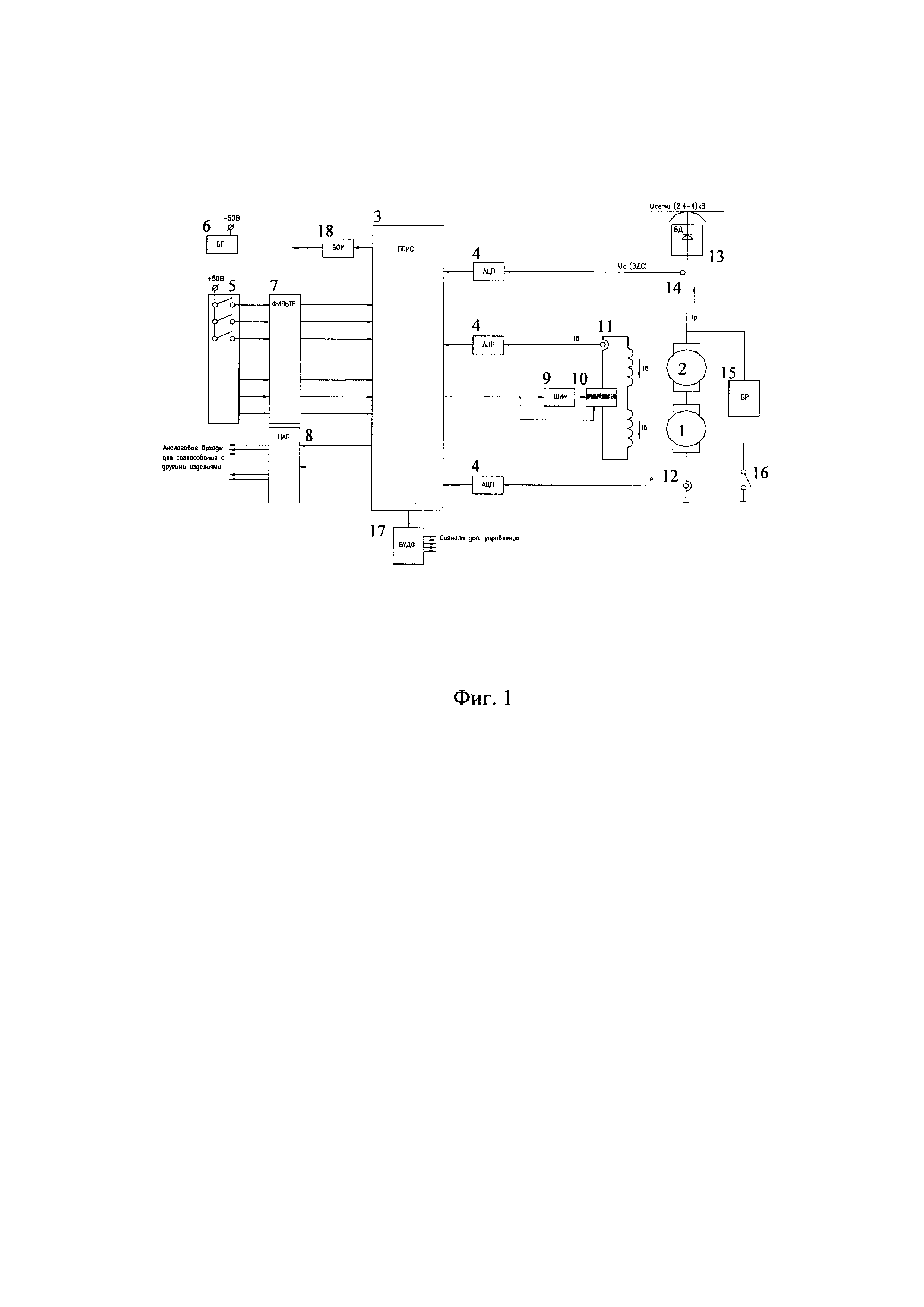
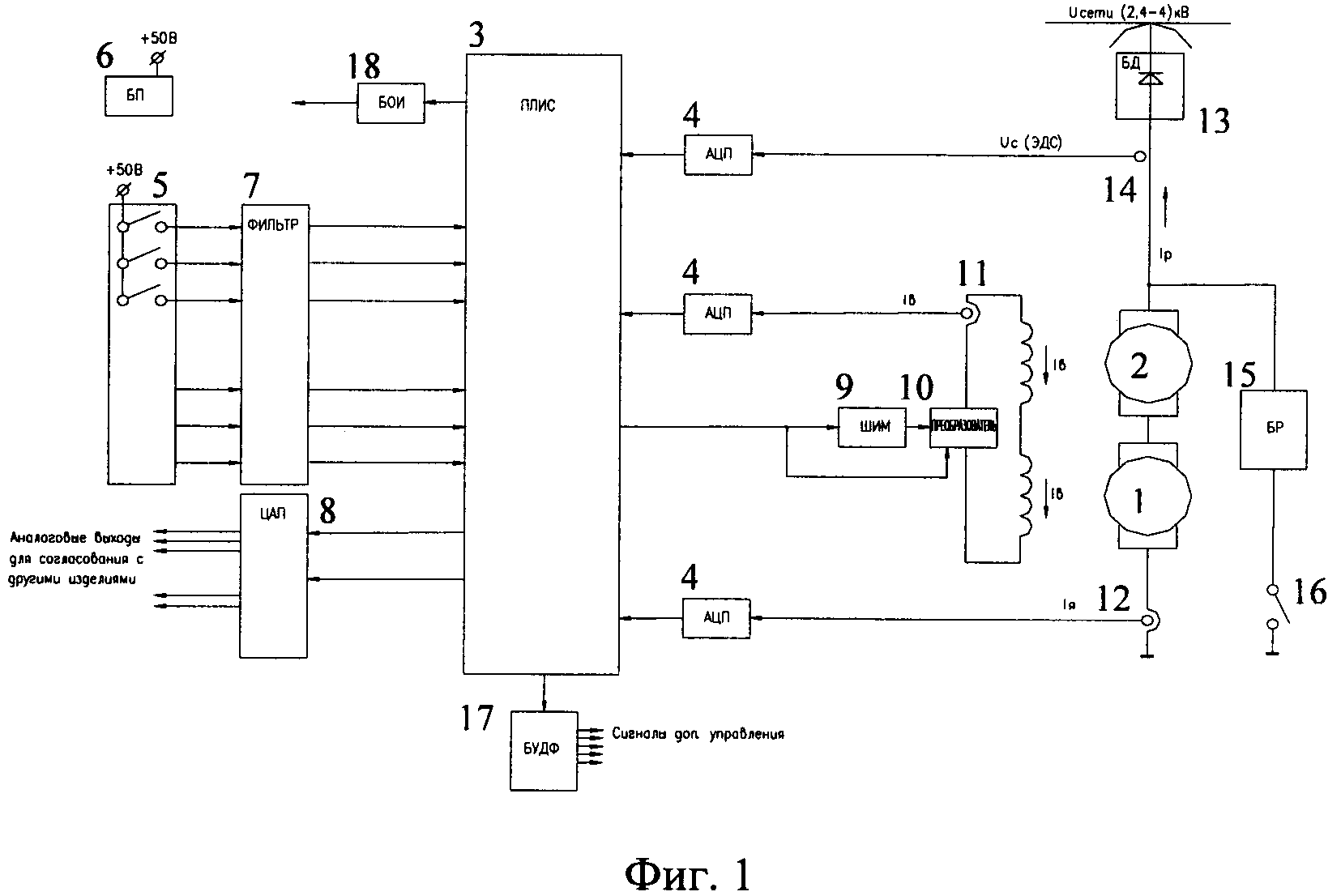
На фиг. 1 приведена блок-схема системы торможения автоматической реостатно-рекуперативной.
Осуществление изобретения
На фиг. 1 обозначены следующие основные узлы и элементы предлагаемой системы торможения автоматической реостатно-рекуперативной:
1 - первый тяговый электродвигатель электровоза (ТЭД);
2 - второй тяговый электродвигатель электровоза (ТЭД);
3 - программируемая логическая интегральная схема (ПЛИС);
4 - аналого-цифровые преобразователи (АЦП) (Данные узлы преобразовывают входящие аналоговые сигналы в цифровой формат);
5 - блок ввода команд, поступающих от системы управления электровозом;
6 - источник питания (Обеспечивает систему необходимыми напряжениями питания);
7 - входные фильтры (Устраняют помехи в цепях управления);
8 - цифро-аналоговые преобразователи (ЦАП) (Преобразуют цифровые сигналы в аналоговые для обеспечения согласования сигналов с системами предыдущего поколения с целью унификации подключения на электровозе);
9 - формирователь ШИМ сигнала для управления преобразователем в случае применения электромеханического преобразователя (Статические преобразователи управляются по заданному протоколу);
10 - преобразователь (Управление обмотками возбуждения ТЭД);
11 - датчик тока возбуждения ТЭД (Осуществляется контроль за значением уровня тока, протекающего в обмотке возбуждения ТЭД);
12 - датчик тока якоря ТЭД (Осуществляется контроль за значением уровня тока, протекающего в обмотке якоря ТЭД);
13 - блок диодов (Для плавного перехода в режим электрического тормоза - в режим реостатно-рекуперативного торможения);
14 - датчик ЭДС (напряжение на двигателях) в режиме электрического тормоза;
15 - блок резисторов (БР) (Подключается в режиме реостатного торможения для увеличения эффективности торможения, что значительно уменьшает тормозной путь электровоза);
16 - контактор включения блока резисторов (БР);
17 - блок управления дополнительными функциями БУДФ (Обеспечивает включение дополнительных исполнительных элементов - реле, контакторы и т.д.);
18 - модуль обмена информацией (БОИ) (Обеспечивает обмен информацией по заданным протоколам с другими устройствами - модули памяти, передача данных и т.д.).
Система торможения автоматическая рекуперативно-реостатная содержит источник питания 6, два тяговых или более электродвигателя постоянного тока 1 и 2, взаимодействующие с блоком диодов 13, предназначенным для перехода в режим рекуперативно-реостатного торможения и с блоком резисторов 15, подключающимся в режиме реостатного торможения, и программируемую логическую интегральную схему (ПЛИС) 3.
Программируемая логическая интегральная схема (ПЛИС) 3 параллельно (одновременно) принимает и обрабатывает проходящие через аналого-цифровые преобразователи 4 сигналы от датчиков, контролирующих значение уровня тока, протекающего в обмотке возбуждения 11 и в обмотке якоря 12 тяговых электродвигателей постоянного тока 1 и 2 и от датчика ЭДС 14, срабатывающего в режиме рекуперативно-реостатного торможения, и цифровые сигналы, поступающие от системы управления электровозом 5, проходящие через входной фильтр 7, устраняющий помехи в цепях управления.
Помимо этого, программируемая логическая интегральная схема (ПЛИС) 3 одновременно формирует выходные управляющие сигналы, поступающие в преобразователь 10 управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией 18 с подключаемыми устройствами, в цифро-аналоговые преобразователи 8 для взаимодействия с аналоговыми системами, а также в блок управления дополнительными функциями 17.
Предлагаемая система торможения автоматическая рекуперативно-реостатная работает следующим образом.
Основное назначение системы заключается в возможности параллельной (одновременной) цифровой приемки и обработки сигналов посредством программируемой логической интегральной схемы 3 (ПЛИС).
На входы программируемой логической интегральной схемы 3 (ПЛИС) поступают сигналы, поступающие от системы управления электровозом 5, а также с датчика тока возбуждения 11, с датчика тока якоря 12 и с датчика ЭДС 14.
От системы управления электровозом 5 поступают следующие дискретные сигналы:
- вид соединения тяговых двигателей электровоза 1 и 2;
- вид режима работы;
- уровень задатчика тормозного усилия (допускается аналоговый или цифровой формат сигнала);
- сигнал включения аварийного реостатного торможения;
- сигнал проверки системы в составе электровоза.
Все сигналы, поступающие из системы управления электровозом 5, проходят через входной фильтр 7, который устраняет помехи в цепях управления.
С датчика тока возбуждения 11 и с датчика тока якоря 12 поступают сигналы о силе тока в цепи обмотки возбуждения тяговых двигателей 1 и 2 электровоза и в цепи якоря тяговых двигателей 1 и 2 электровоза. С датчика напряжения 14 поступает сигнал уровня ЭДС тяговых двигателей 1 и 2 электровоза.
Сигналы с датчика тока возбуждения 11, с датчика тока якоря 12 и с датчика ЭДС 14 обрабатываются в аналогово-цифровом преобразователе 4 (АЦП) только при необходимости, поскольку система торможения может обрабатывать поступающие в программируемую логическую интегральную схему 3 (ПЛИС) сигналы как в цифровом, так и в аналоговом формате и поступают на нее по заданному алгоритму, который обеспечивает нормальный режим работы электровоза в режиме реостатно-рекуперативного торможения с соблюдением всех необходимых ограничений, таких как значения параметров токов и напряжений, скорости нарастания сигналов, амплитуды сигналов и т.д.
Поступающие в программируемую логическую интегральную схему 3 (ПЛИС) сигналы от системы управления электровозом 5, сигналы с датчика тока возбуждения 11, с датчика тока якоря 12 и с датчика ЭДС 14 - обрабатываются и система вырабатывает соответствующие сигналы для управления работой всех преобразователей.
Формирователь ШИМ сигнала 9 управляет преобразователем 10 в случае использования электромеханического преобразователя 10, а статический преобразователь 10 управляется по заданному протоколу. При этом возможны следующие варианты протокола:
- цифровой код (интерфейс);
- линейное изменение выходного напряжения;
- частотное управление.
Одновременно вырабатываются команды для поступления в блок управления дополнительными функциями 17, такими как включение промежуточных реле электровоза, обеспечивающих импульсную подсыпку песка под колесные пары.
Блок обмена информацией 18 (БОИ) обеспечивает обмен данными для следующих функций:
- корректировка выходных сигналов в зависимости от диаметра бандажей колесных пар;
- запись данных датчика тока возбуждения 11, датчика тока якоря 12 и датчика ЭДС 14 в реальном времени и сохранение этих данных в энергонезависимой памяти;
- передача данных контроля удаленному пользователю.
Для обеспечения возможности взаимодействия с системами предыдущего поколения, установленные на электровозе, вырабатываются все необходимые аналоговые сигналы с помощью цифро-аналоговых преобразователей 8 (ЦАП), что позволит при необходимости, совместно использовать разные системы в разных секциях электровоза постоянного тока.
При снижении тормозного усилия вырабатывается сигнал для подключения блока резисторов 15, что обеспечивает восстановление необходимого тормозного усилия. Блок резисторов 15 подключается при помощи контактора 16.
Устройство для импульсной подачи песка под колеса локомотива

