Результат интеллектуальной деятельности: Пороговое устройство для сигналов систем управления воздушным движением
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в системах управления воздушным движением (УВД).
Известно, что принцип работы систем УВД основан на обмене импульсно-кодовыми посылками наземной аппаратуры и летательных аппаратов, позволяющими определить дальность и направление, а также получить полетную информацию. При этом в местах крупных авиационных узлов из-за плотной застройки и большого количества одновременно работающих радиоэлектронных средств существенно увеличивается количество непрерывных и импульсных помеховых сигналов, которые могут практически парализовать работу аппаратуры УВД за счет следующих факторов: колебания постоянной составляющей сигнала на выходе приемного устройства из-за воздействия на вход приемного устройства квазинепрерывной несущей частоты переменного уровня блокируют работу обычного порогового устройства с фиксированным уровнем порога; перегрузки устройств дешифрации из-за большого числа импульсных сигналов от других радиоэлектронных средств приводят к сбоям в приеме полезного сигнала; появление большого количества ложных целей из-за наличия многочисленных переотраженных от радиоконтрастных объектов сигналов.
Известны различные способы борьбы с приведенными мешающими факторами, такие как:
- широко описанные в литературе схемы выделения среднего значения (фильтры низких частот, интеграторы и т.д.), позволяющие скомпенсировать медленно меняющуюся постоянную составляющую сигнала на входе порогового устройства;
- схемы стабилизации числа ложных срабатываний порогового устройства за счет управления уровнем усиления входного сигнала или величиной порога срабатывания;
- схема подавления переотраженных сигналов путем повышения порога срабатывания после приема импульса с последующим плавным снижением порога с фиксированной скоростью, позволяющая исключить обработку переотраженных сигналов, имеющих меньшую амплитуду и большую задержку прихода относительно основного импульса, как описано в п. 3.1.1.7.7 тома 4 Приложения 10 к Конвенции о международной гражданской авиации «Авиационная электросвязь».
Наиболее близким к предлагаемому техническому решению является устройство обнаружения и оценки радиолокационных импульсов (патент US №5,574,459, «Device for the detection and characterizing of radar pulses» опубликовано 12.11.1996 г., МПК: G01S 13/87, G01S 13/76, G01S 7/292), которое выбрано в качестве прототипа. Устройство содержит аналого-цифровой преобразователь, схему вычисления постоянной составляющей сигнала, блок измерения шума, блок отбрасывания малых значений, блок оценки, блок выделения перепадов сигнала, блок вычислителя амплитуды импульса. В данном устройстве принимаемый сигнал усредняется в блоке вычисления постоянной составляющей сигнала, причем на время обнаружения импульса блок отключается от входного сигнала и на его вход подается величина, равная последнему отсчету, принятому перед импульсом. Полученная постоянная составляющая вычитается из принятого сигнала, полученный сигнал подается на входы блока измерения шума и блока отбрасывания малых значений. Максимальная и минимальная величина постоянной составляющей передается в блок оценки. Блок измерения шума подсчитывает количество превышений сигналом установленного порога, названного шумовым, за определенный период времени и передает это значение в блок оценки, причем на время приема импульса работа блока блокируется. Блок отбрасывания малых значений пропускает без изменений отсчеты сигнала, превышающие установленный порог, и приравнивает к нулю отсчеты сигнала меньше, чем этот порог, после чего обработанный сигнал поступает на вход блока выделения перепадов сигнала. Блок выделения перепадов сигнала на основе вычисленных допусков сигнала определяет время наличия сигнала (используется для бланкирования работы блока выделения постоянной составляющей и блока измерения шума), момент прихода фронта импульса, момент прихода спада импульса и формирует видеоимпульсы принимаемого сигнала. Блок вычислителя амплитуды импульса на основании отсчетов сигнала с выхода АЦП и импульсов обнаружения фронта и спада импульса вычисляет методом усреднения амплитуду принимаемых импульсов. Блок оценки на основании данных о максимальном и минимальном уровнях постоянной составляющей и количестве превышений сигналом порога вычисляет допуски сигнала для блока выделения перепадов сигнала и определяет тип воздействующей помехи (белый шум, непрерывная несущая или амплитудно-модулированная непрерывная несущая).
Таким образом, принятое за прототип устройство позволяет обнаруживать подавляющее большинство импульсов на фоне воздействия различных помех и проводить определение типа воздействующей помехи, что наиболее полно отвечает задачам, выполняемым первичным локатором. Однако аппаратура управления воздушным движением обладает собственной спецификой, делающей представленный в прототипе способ приема не оптимальным. Поскольку, из-за необходимости оценки параметров импульсов, составляющих ответный сигнал, их амплитуды и взаимного положения, вычислительная нагрузка на устройства дешифрации ответа очень велика, то актуальной является задача предварительной отбраковки в пороговом устройстве импульсов, являющихся выбросами шума с выхода приемного устройства, частью высокоинтенсивного потока сигналов от далеко расположенных средств УВД или сигналами, отраженными от подстилающей поверхности и радиоконтрастных объектов.
Техническая проблема заключается в недостаточной помехозащищенности бортовой аппаратуры УВД.
Технический результат состоит в увеличении помехозащищенности бортовой аппаратуры УВД за счет ограничения потока импульсов, поступающих на дешифрующее устройство, предотвращения блокирования порогового устройства импульсными сигналами большой плотности, сигналами типа «непрерывная несущая» и сигналами, отраженными от земной/морской поверхности или радиоконтрастных объектов.
Технический результат достигается тем, что пороговое устройство для сигналов систем управления воздушным движением содержит аналого-цифровой преобразователь, схему вычисления постоянной составляющей сигнала, блок вычислителя амплитуды. Пороговое устройство отличается от прототипа тем, что дополнительно содержит первый цифровой компаратор, первый цифровой сумматор, второй цифровой компаратор, противопомеховое устройство, первую схему выбора максимального значения, схему плавающего порога, второй цифровой сумматор, третий цифровой сумматор, третий цифровой компаратор, вторую схему выбора максимального значения, четвертый цифровой компаратор.
При этом вход аналого-цифрового преобразователя соединен с источником входного сигнала, а выход параллельно подсоединен к первому входу первого цифрового компаратора, второму входу блока вычислителя амплитуды, первому входу второго цифрового компаратора, первому входу третьего цифрового компаратора, первому входу схемы вычисления постоянной составляющей сигнала, первому входу четвертого цифрового компаратора, второй вход первого цифрового компаратора соединен с выходом второй схемы выбора максимального значения, выход первого цифрового компаратора параллельно соединен с первым входом блока вычислителя амплитуды и вторым входом схемы плавающего порога, выход блока вычислителя амплитуды соединен с первым входом схемы плавающего порога, выход схемы плавающего порога соединен с первым входом второй схемы выбора максимального значения, первый вход первого цифрового сумматора соединен с источником константы Const_Dshara, второй вход первого цифрового сумматора соединен с выходом третьего цифрового сумматора, который соединен со вторым входом второй схемы выбора максимального значения, выход первого цифрового сумматора соединен со вторым входом второго цифрового компаратора, выход второго цифрового компаратора соединен с входом противопомехового устройства, выход противопомехового устройства соединен с первым входом третьего цифрового сумматора, второй вход схемы вычисления постоянной составляющей сигнала соединен с выходом третьего цифрового компаратора, выход схемы вычисления постоянной составляющей сигнала соединен с первым входом первой схемы выбора максимального значения, второй вход первой схемы выбора максимального значения соединен с источником константы Const_Smin, выход первой схемы выбора максимального значения соединен с первым входом второго цифрового сумматора, второй вход второго цифрового сумматора соединен с источником константы Const_Obn, выход второго цифрового сумматора параллельно соединен со вторым входом третьего цифрового сумматора и вторым входом третьего цифрового компаратора, выход второй схемы выбора максимального значения соединен со вторым входом четвертого цифрового компаратора, выход четвертого цифрового компаратора соединен с приемником выходного сигнала.
Сущность предлагаемого порогового устройства для сигналов систем управления воздушным движением поясняется чертежами Фиг. 1 - Фиг. 6, на которых представлено следующее:
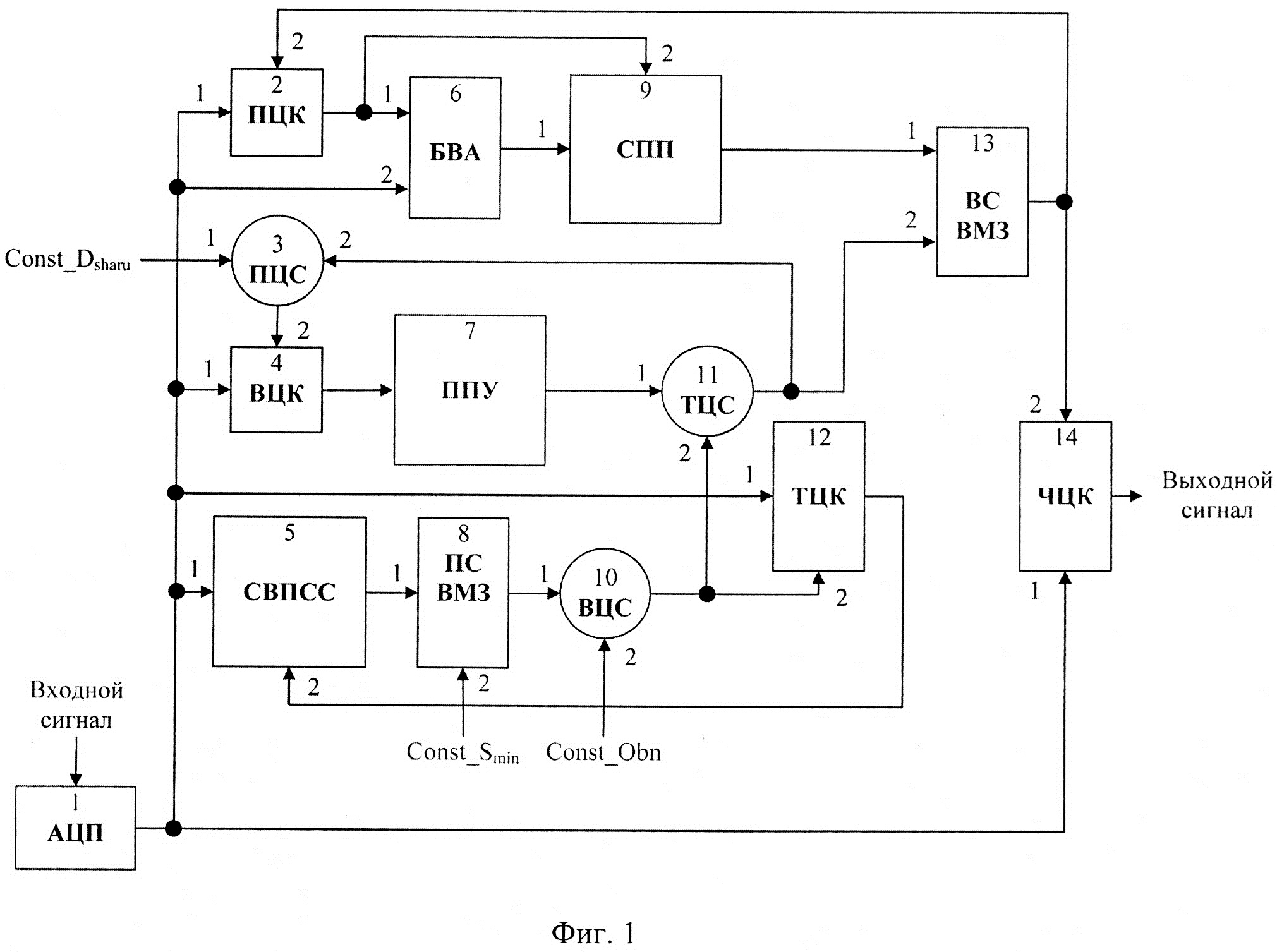
Фиг. 1 - структурная схема порогового устройства для сигналов систем управления воздушным движением,
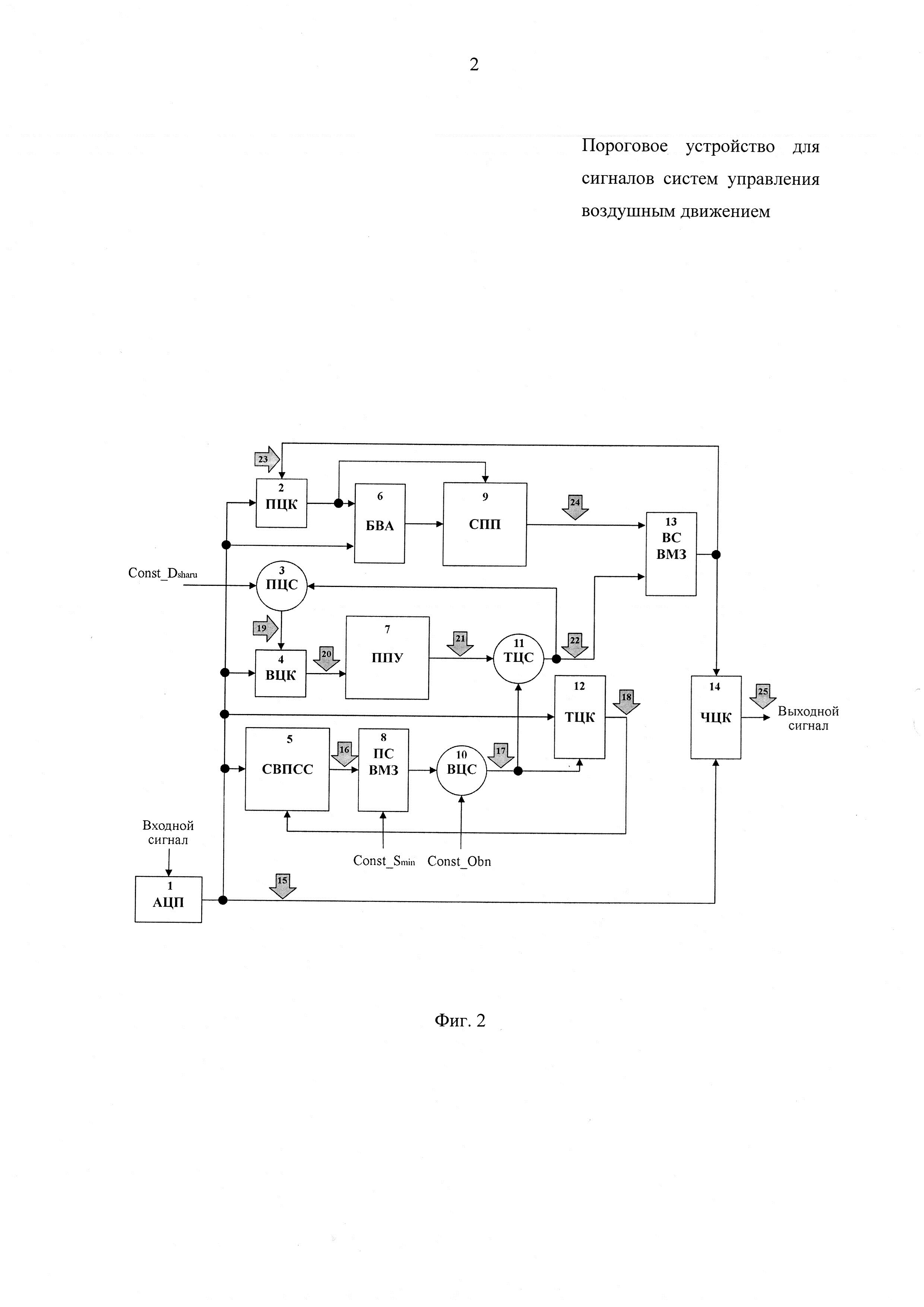
Фиг. 2 - структурная схема порогового устройства с точками для эпюр;
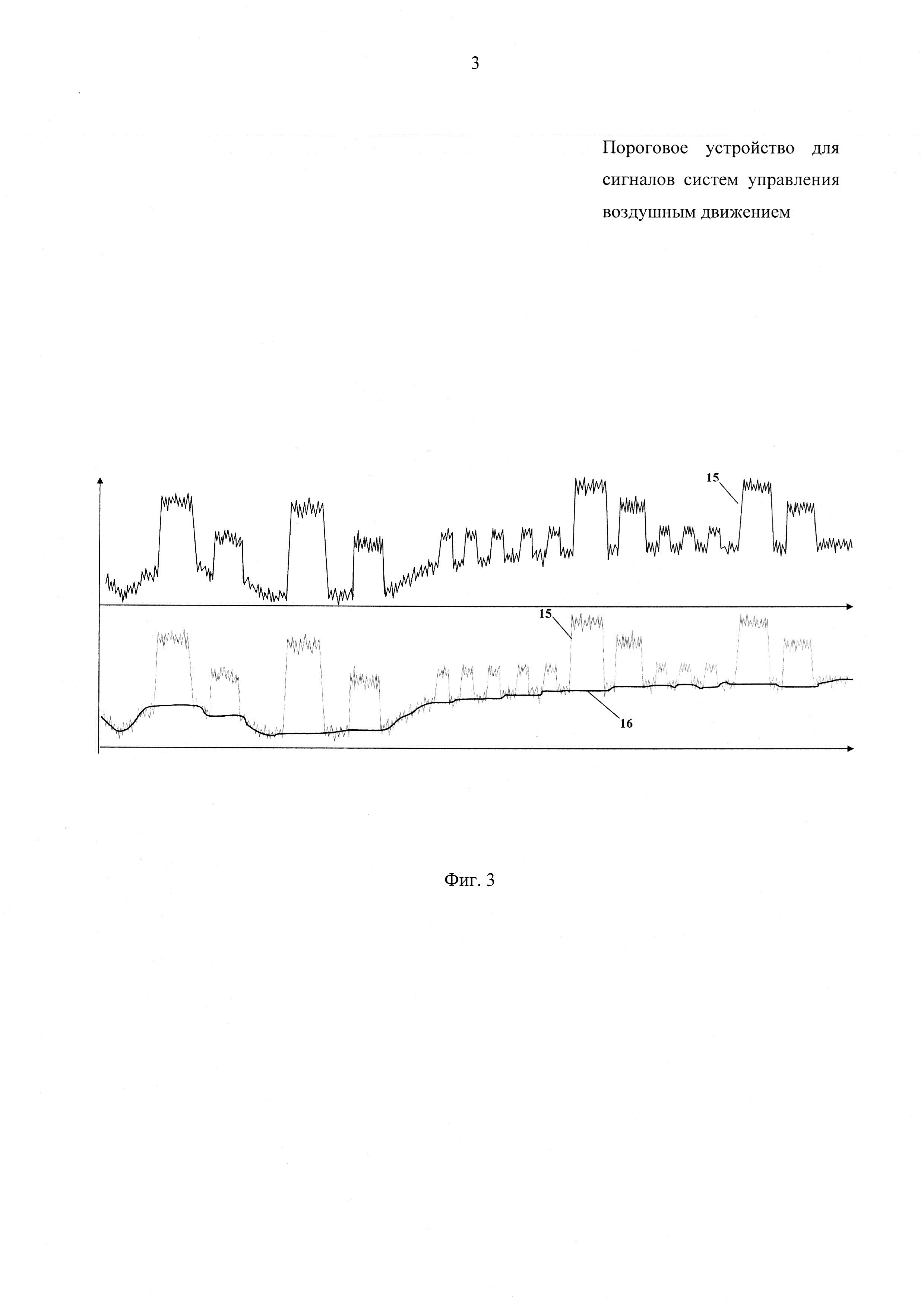
Фиг. 3 - эпюра, иллюстрирующая обобщенный вид сигнала;
Фиг. 4 - эпюра, иллюстрирующая работу третьего цифрового компаратора;
Фиг 5 - эпюра, иллюстрирующая работу противопомехового устройства;
Фиг. 6 - эпюра, иллюстрирующая работу схемы плавающего порога и четвертого цифрового компаратора.
Предлагаемое пороговое устройство для сигналов систем управления воздушным движением, структурная схема которого приведена на Фиг. 1, состоит из следующих блоков:
1 - аналого-цифрового преобразователя (АЦП),
2 - первого цифрового компаратора (ПЦК),
3 - первого цифрового сумматора (ПЦС),
4 - второго цифрового компаратора (ВЦК),
5 - схемы вычисления постоянной составляющей сигнала (СВПСС),
6 - блока вычислителя амплитуды (БВА),
7 - противопомехового устройства (ППУ),
8 - первой схемы выбора максимального значения (ПСВМЗ),
9 - схемы плавающего порога (СПП),
10 - второго цифрового сумматора (ВЦС),
11 - третьего цифрового сумматора (ТЦС),
12 - третьего цифрового компаратора (ТЦК),
13 - второй схемы выбора максимального значения (ВСВМЗ),
14 - четвертого цифрового компаратора (ЧЦК).
При этом вход аналого-цифрового преобразователя (АЦП) 1 соединен с источником входного сигнала, а выход АЦП 1 параллельно подсоединен к первому входу первого цифрового компаратора (ПЦК) 2, второму входу блока вычислителя амплитуды (БВА) 6, первому входу второго цифрового компаратора (ВПК) 4, первому входу третьего цифрового компаратора (ТЦК) 12, первому входу схемы вычисления постоянной составляющей сигнала (СВПСВС) 5, первому входу четвертого цифрового компаратора (ЧЦК) 14, второй вход первого цифрового компаратора 2 соединен с выходом второй схемы выбора максимального значения (ВСВМЗ) 13, выход первого цифрового компаратора 2 параллельно соединен с первым входом блока вычислителя амплитуды 6 и вторым входом схемы плавающего порога (СПП) 9, выход блока вычислителя амплитуды 6 соединен с первым входом СПП 9, выход схемы плавающего порога 9 соединен с первым входом второй схемы выбора максимального значения 13, первый вход первого цифрового сумматора (ПЦС) 3 соединен с источником константы Const_Dsharu, второй вход первого цифрового сумматора 3 соединен с выходом третьего цифрового сумматора (ТЦС) 11, который соединен со вторым входом второй схемы выбора максимального значения 13, выход первого цифрового сумматора 3 соединен со вторым входом второго цифрового компаратора 4, выход второго цифрового компаратора 4 соединен с входом противопомехового устройства (ППУ) 7, выход ППУ 7 соединен с первым входом третьего цифрового сумматора 11, второй вход СВПСС 5 соединен с выходом третьего цифрового компаратора 12, выход СВПСС 5 соединен с первым входом первой схемы выбора максимального значения (ПСВМЗ) 8, второй вход первой схемы выбора максимального значения 8 соединен с источником константы Const_Smin, выход первой схемы выбора максимального значения 8 соединен с первым входом второго цифрового сумматора (ВЦС) 10, второй вход второго цифрового сумматора 10 соединен с источником константы Const_Obn, выход второго цифрового сумматора 10 параллельно соединен со вторым входом третьего цифрового сумматора 11 и вторым входом третьего цифрового компаратора 12, выход второй схемы выбора максимального значения 13 соединен со вторым входом четвертого цифрового компаратора (ЧЦК) 14, выход четвертого цифрового компаратора 14 соединен с приемником выходного сигнала.
Принцип работы предлагаемого порогового устройства для сигналов систем управления воздушным движением заключается в следующем. Входной сигнал после аналого-цифрового преобразования в АЦП 1 поступает на схему вычисления постоянной составляющей сигнала 5, которая осуществляет усреднение отсчетов входного сигнала в определенном интервале, величина которого зависит от необходимой постоянной времени срабатывания схемы. Для предотвращения срабатываний по импульсным сигналам на второй вход СВПСС 5 поступает сигнал блокирования работы, вырабатываемый третьим цифровым компаратором 12, на основе сравнения входного сигнала с пороговым уровнем, образованным суммой постоянной составляющей сигнала и заранее установленной константой обнаружения Const_Obn, учитывающей ожидаемый уровень шума входного сигнала.
Полученная постоянная составляющая сигнала используется в схеме противопомехового устройства 7. При этом на вход ППУ 7 поступает сигнал со второго цифрового компаратора 4 и при превышении частоты следования импульсов определенного заранее заданного уровня схема ППУ 7 повышает порог срабатывания на своем выходе, а при отсутствии превышения частоты следования в течение некоторого времени порог на выходе ППУ 7 снижается. В качестве порогового уровня для второго цифрового компаратора 4 используется сумма постоянной составляющей сигнала и величины порога на выходе ППУ 7, из которой вычитается константа Const_Dsharu, обеспечивающая защитный интервал срабатывания для четвертого цифрового компаратора 14. Для подавления переотраженных импульсов применяется схема плавающего порога (СПП) 9, которая при приеме импульса с выхода первого цифрового компаратора 2 фиксирует амплитуду импульса, полученную от блока вычислителя амплитуды 6, после чего устанавливает на своем выходе величину порога, уменьшенную на определенную величину относительно амплитуды принятого импульса, удерживает значение порога на своем выходе в течение некоторого интервала времени, после чего начинает его снижение с фиксированной скоростью. При поступлении нового импульса работа СПП 9 начинается заново. Для фиксации момента прихода импульсов используется первый цифровой компаратор 2, в котором в качестве порога используется наибольшая из двух величин: выхода СПП 9 и суммы выхода ППУ 7 с постоянной составляющей сигнала. В качестве выхода пороговой схемы используется выход четвертого цифрового компаратора 14, сравнивающего величину сигнала с выхода АЦП 1 с наибольшим из двух величин: выхода СПП 9 и суммы выхода ППУ 7 с постоянной составляющей сигнала.
Для иллюстрации работы предлагаемого порогового устройства для сигналов систем управления воздушным движением приведены чертежи, Фиг. 2-6.
На Фиг. 2 показаны точки 15-25, обозначенные стрелками, на структурной схеме порогового устройства, для которых сняты эпюры, приведенные на Фиг. 3 - Фиг. 6.
На Фиг. 3 приведен обобщенный вид сигнала, содержащий все основные компоненты с которыми приходится иметь дело при реальной работе аппаратуры управления воздушным движением (полезный сигнал; сигнал, отраженный от земли или радиоконтрастных объектов; импульсная помеха), а также проиллюстрирована работа схемы выделения постоянной составляющей сигнала (СВПСС).
На Фиг. 4 проиллюстрирована работа третьего цифрового компаратора (ТЦК), осуществляющего выделение всех импульсных сигналов на входе устройства, а также приведено изменение порога обнаружения ТЦК, учитывающего уровень постоянной составляющей входного сигнала и дополнительную константу обнаружения (Const_Obn), защищающую ТЦК от срабатывания по выбросам шума на входе.
На Фиг. 5 проиллюстрирована работа противомехового устройства, включая процесс увеличения порога срабатывания при приходе импульсов с высокой частотой повторения (помеховых) и результат работы схемы, проявляющийся в отбраковке помеховых импульсов.
На Фиг. 6 проиллюстрирована работа схемы плавающего порога и четвертого цифрового компаратора, включая: плавающий порог, учитывающий амплитуды приходящих импульсов и блокирующий переотраженные сигналы, приходящие позже; общий порог с выхода схемы выбора максимального значения, объединяющий результаты работы всех узлов схемы порогового устройства; результат работы схемы, по которому наглядно видна фильтрация переотраженных и помеховых импульсов, при сохранении обнаружения полезного сигнала (несколько обнаруженных помеховых импульсов соответствуют времени переходного процесса схемы ППУ).
Таким образом, пороговое устройство, предназначенное для обнаружения сигналов систем управления воздушным движением, обеспечивает фиксацию прихода импульса при превышении амплитудой сигнала на входе определенного порога срабатывания, причем уровень порога срабатывания определяется совокупностью величин постоянной составляющей сигнала, частоты следования импульсов и ожидаемой расстановки импульсов на входе порогового устройства.
Пороговое устройство для сигналов систем управления воздушным движением, содержащее аналого-цифровой преобразователь, схему вычисления постоянной составляющей сигнала, блок вычислителя амплитуды, отличающееся тем, что дополнительно включает первый цифровой компаратор, первый цифровой сумматор, второй цифровой компаратор, противопомеховое устройство, первую схему выбора максимального значения, схему плавающего порога, второй цифровой сумматор, третий цифровой сумматор, третий цифровой компаратор, вторую схему выбора максимального значения, четвертый цифровой компаратор, при этом вход аналого-цифрового преобразователя соединен с источником входного сигнала, а выход параллельно подсоединен к первому входу первого цифрового компаратора, второму входу блока вычислителя амплитуды, первому входу второго цифрового компаратора, первому входу третьего цифрового компаратора, первому входу схемы вычисления постоянной составляющей сигнала, первому входу четвертого цифрового компаратора, второй вход первого цифрового компаратора соединен с выходом второй схемы выбора максимального значения, выход первого цифрового компаратора параллельно соединен с первым входом блока вычислителя амплитуды и вторым входом схемы плавающего порога, выход блока вычислителя амплитуды соединен с первым входом схемы плавающего порога, выход схемы плавающего порога соединен с первым входом второй схемы выбора максимального значения, первый вход первого цифрового сумматора соединен с источником константы Const_Dsharu, второй вход первого цифрового сумматора соединен с выходом третьего цифрового сумматора, который соединен со вторым входом второй схемы выбора максимального значения, выход первого цифрового сумматора соединен со вторым входом второго цифрового компаратора, выход второго цифрового компаратора соединен с входом противопомехового устройства, выход противопомехового устройства соединен с первым входом третьего цифрового сумматора, второй вход схемы вычисления постоянной составляющей сигнала соединен с выходом третьего цифрового компаратора, выход схемы вычисления постоянной составляющей сигнала соединен с первым входом первой схемы выбора максимального значения, второй вход первой схемы выбора максимального значения соединен с источником константы Const_Smin, выход первой схемы выбора максимального значения соединен с первым входом второго цифрового сумматора, второй вход второго цифрового сумматора соединен с источником константы Const_Obn, выход второго цифрового сумматора параллельно соединен со вторым входом третьего цифрового сумматора и вторым входом третьего цифрового компаратора, выход второй схемы выбора максимального значения соединен со вторым входом четвертого цифрового компаратора, выход четвертого цифрового компаратора соединен с приемником выходного сигнала.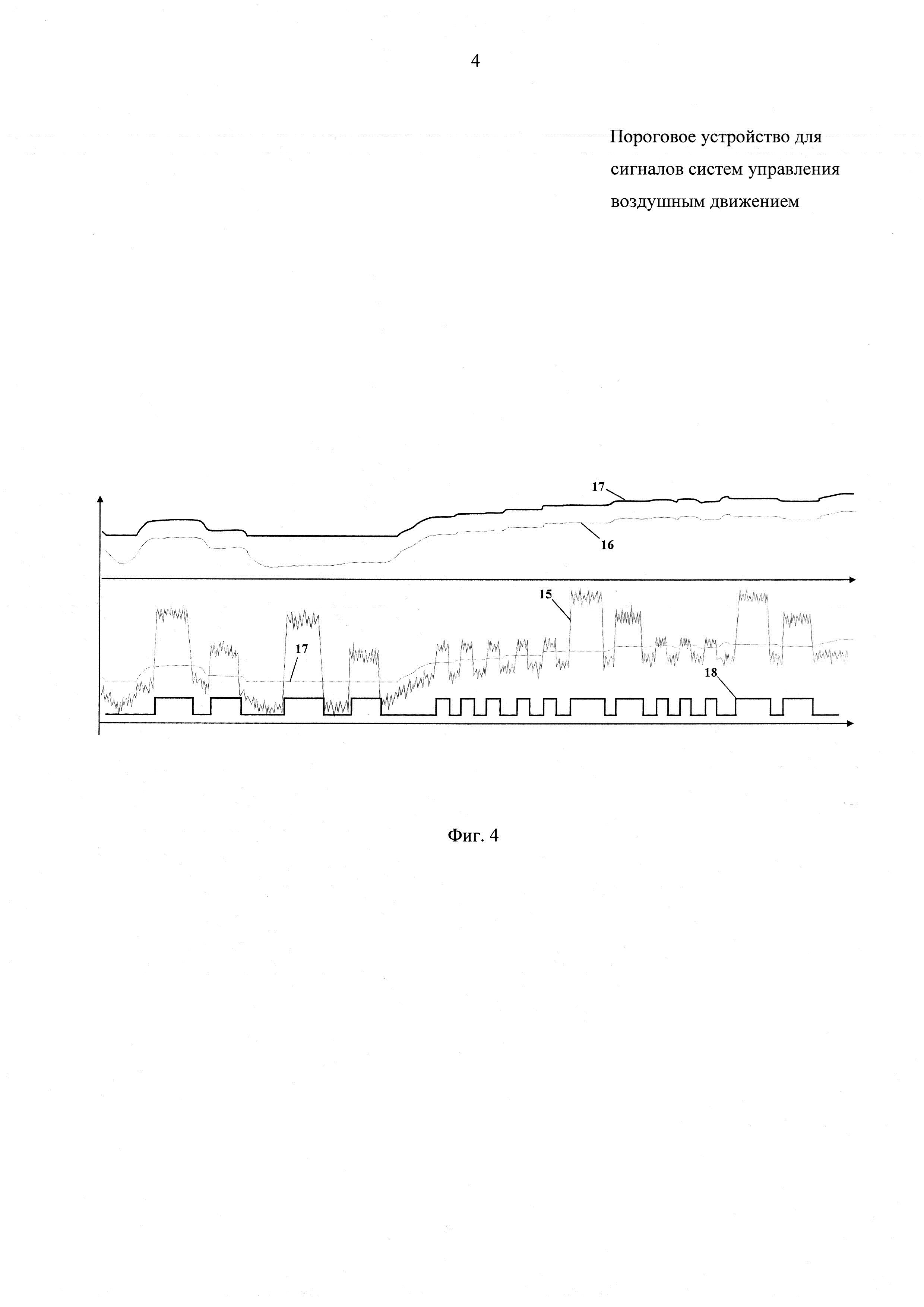
Система утилизации медицинских отходов
Способ изготовления многослойной печатной платы
Способ телеориентации движущихся объектов
Клапан шаровой запорный
Способ измерения поляризационной матрицы рассеяния объекта
Способ улучшения цифровых цветных изображений
Разъёмное резьбовое соединение деталей, гайка разъёмного соединения
Способ измерения поляризационной матрицы рассеяния объекта с компенсацией искажений
Способ определения угловых координат цели с помощью линейной антенной решетки
Способ определения азимута цели с помощью интерполированной пеленгационной характеристики
Способ повышения надежности опознавания в радиолокационной системе активного запроса-ответа

