Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НЕПРАВИЛЬНОГО РАСПОЗНАВАНИЯ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
1. ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству определения неправильного распознавания.
2. ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Традиционно известно устройство, которое выполняет управление транспортным средством с помощью множества датчиков, такое как устройство, описанное в публикации японской патентной заявки № 2003-182474 (JP 2003-182474 A). Это устройство, с помощью множества датчиков, установленных на транспортном средстве, выполняет управление транспортным средством на основе входных данных, обнаруженных, не единственным датчиком, а множеством датчиков.
[0003] Однако, даже если данные, принятые от множества типов датчиков, используются, чтобы вычислять множество параметров движения, которые будут использованы для управления движением транспортного средства, может происходить неправильное распознавание в параметрах движения, вычисленных из множества типов датчиков, в одно и то же время в зависимости от состояния движения транспортного средства. Например, когда параметры движения вычисляются с помощью входных данных, принятых от датчика изображений на основе камеры, радиолокационного датчика и GPS-датчика, и если транспортное средство, которое движется в туннеле, не может распознавать белую линию вследствие фоновой засветки рядом с выездом из туннеля и, кроме того, не может принимать сигнал GPS-приема, существует вероятность, что параметр движения на основе входных данных, принятых от датчика изображений, и параметр движения на основе входных данных, принятых от GPS-датчика, неправильно распознаются в одно и то же время.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Настоящее изобретение предоставляет устройство определения неправильного распознавания, которое может точно определять, происходит ли неправильное распознавание в группе параметров, которая включает в себя множество параметров движения, вычисленных на основе входных данных.
[0005] Т.е., устройство определения неправильного распознавания в аспекте настоящего изобретения включает в себя блок вычисления параметров движения, который вычисляет, по меньшей мере, первый параметр движения, который используется для управления вождением транспортного средства и основан на первых входных данных, второй параметр движения, который используется для управления вождением транспортного средства и основан на вторых входных данных, и третий параметр движения, который используется для управления вождением транспортного средства и основан на третьих входных данных; блок вычисления различия, который вычисляет, по меньшей мере, первое различие, т.е., различие между первым параметром движения и вторым параметром движения, второе различие, т.е. различие между первым параметром движения и третьим параметром движения, и третье различие, т.е., различие между вторым параметром движения и третьим параметром движения; блок задания весовых коэффициентов, который задает, по меньшей мере, первый весовой коэффициент, второй весовой коэффициент и третий весовой коэффициент, задавая весовые коэффициенты таким образом, что чем выше ортогональность между первыми входными данными и вторыми входными данными в обстановке движения транспортного средства, тем больше первый весовой коэффициент, чем выше ортогональность между первыми входными данными и третьими входными данными в обстановке движения, тем больше второй весовой коэффициент, и чем выше ортогональность между вторыми входными данными и третьими входными данными в обстановке движения, тем больше третий весовой коэффициент; и блок определения, который определяет, происходит ли неправильное распознавание в группе параметров, которая включает в себя, по меньшей мере, первый параметр движения, второй параметр движения и третий параметр движения, с помощью значения, сформированного умножением первого различия на первый весовой коэффициент, значения, сформированного умножением второго различия на второй весовой коэффициент, и значения, сформированного умножением третьего различия на третий весовой коэффициент. Согласно этому устройству определения неправильного распознавания, чем выше ортогональность между различными входными данными в обстановке движения транспортного средства, тем большим задается весовой коэффициент, и, с помощью значений, каждое из которых сформировано умножением различия между параметрами движения на основе входных данных на весовой коэффициент, выполняется определение о том, происходит ли неправильное распознавание во множестве параметров движения. Следовательно, могут быть заданы весовые коэффициенты, принимая во внимание, что входные данные, которые различаются по состоянию движения транспортного средства, затруднительно неправильно распознавать в одно и то же время. Это предоставляет возможность точного определения неправильного распознавания параметров движения.
[0006] В вышеприведенном аспекте, когда водитель транспортного средства выполняет действие переключения на ручное вождение во время управления вождением транспортного средства, блок задания весовых коэффициентов может сбрасывать, по меньшей мере, один из первого весового коэффициента, второго весового коэффициента и третьего весового коэффициента, используемого в обстановке движения, когда водитель выполняет действие переключения на ручное вождение, так что блок определения может определять неправильное распознавание более простым образом, чем когда водитель не выполняет действие переключения на ручное вождение. В этом случае, когда выполняется действие переключения на ручное вождение во время управления вождением транспортного средства, по меньшей мере, один из первого весового коэффициента, второго весового коэффициента и третьего весового коэффициента сбрасывается, так что блок определения может определять более простым образом, что происходит неправильное распознавание, чем когда действие переключения на ручное вождение не выполняется. В результате, когда выполняется действие переключения на ручное вождение, и существует вероятность, что управление вождением не выполняется как предполагается водителем, блок определения может определять более простым образом, что происходит неправильное распознавание в группе параметров движения. Следовательно, определение неправильного распознавания параметров движения может быть выполнено более точно согласно обстановке движения.
[0007] В вышеописанном аспекте, если сумма значения, сформированного умножением первого различия на первый весовой коэффициент, значения, сформированного умножением второго различия на второй весовой коэффициент, и значения, сформированного умножением третьего различия на третий весовой коэффициент, не меньше предварительно заданного порогового значения, блок определения может определять, что происходит неправильное распознавание в группе параметров, которая включает в себя, по меньшей мере, первый параметр движения, второй параметр движения и третий параметр движения. В этом случае, если сумма значения, сформированного умножением первого различия на первый весовой коэффициент, значения, сформированного умножением второго различия на второй весовой коэффициент, и значения, сформированного умножением третьего различия на третий весовой коэффициент, не меньше предварительно заданного порогового значения, может быть выполнено определение, что происходит неправильное распознавание в группе параметров, которая включает в себя, по меньшей мере, первый параметр движения, второй параметр движения и третий параметр движения.
[0008] В вышеприведенном аспекте блок вычисления параметров движения может вычислять четвертый параметр движения, используемый для управления вождением транспортного средства, на основе четвертых входных данных, блок вычисления различия может вычислять, по меньшей мере, первое различие, второе различие, третье различие, четвертое различие, т.е., различие между первым параметром движения и четвертым параметром движения, пятое различие, т.е., различие между вторым параметром движения и четвертым параметром движения, и шестое различие, т.е., различие между третьим параметром движения и четвертым параметром движения, блок задания весовых коэффициентов может задавать, по меньшей мере, первый весовой коэффициент, второй весовой коэффициент, третий весовой коэффициент, четвертый весовой коэффициент согласно ортогональности между первыми входными данными и четвертыми входными данными в обстановке движения, пятый весовой коэффициент согласно ортогональности между вторыми входными данными и четвертыми входными данными в обстановке движения, и шестой весовой коэффициент согласно ортогональности между третьими входными данными и четвертыми входными данными в обстановке движения, и блок определения может определять, происходит ли неправильное распознавание в группе параметров, которая включает в себя, по меньшей мере, первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения, с помощью значения, сформированного умножением первого различия на первый весовой коэффициент, значения, сформированного умножением второго различия на второй весовой коэффициент, значения, сформированного умножением третьего различия на третий весовой коэффициент, значения, сформированного умножением четвертого различия на четвертый весовой коэффициент, значения, сформированного умножением пятого различия на пятый весовой коэффициент, и значения, сформированного умножением шестого различия на шестой весовой коэффициент.
[0009] Кроме того, в вышеприведенном аспекте, если сумма значения, сформированного умножением первого различия на первый весовой коэффициент, значения, сформированного умножением второго различия на второй весовой коэффициент, значения, сформированного умножением третьего различия на третий весовой коэффициент, значения, сформированного умножением четвертого различия на четвертый весовой коэффициент, значения, сформированного умножением пятого различия на пятый весовой коэффициент, и значения, сформированного умножением шестого различия на шестой весовой коэффициент, не меньше предварительно заданного порогового значения, блок определения может определять, что происходит неправильное распознавание в группе параметров, которая включает в себя, по меньшей мере, первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения.
[0010] Согласно настоящему изобретению, представляется возможным точно определять, происходит ли неправильное распознавание в группе параметров, которая включает в себя множество параметров движения, вычисленных на основе входных данных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 – это блок-схема, показывающая схему конфигурации устройства определения неправильного распознавания в одном варианте осуществления настоящего изобретения;
Фиг. 2 – это схема, показывающая ситуацию движения, в которой параметры движения, используемые для управления вождением, беспрепятственно неправильно распознаются;
Фиг. 3 – это схема, показывающая ситуацию движения, в которой параметры движения, используемые для управления вождением, беспрепятственно неправильно распознаются;
Фиг. 4 – это схема, показывающая ситуацию движения, в которой параметры движения, используемые для управления вождением, беспрепятственно неправильно распознаются;
Фиг. 5 – это схема, показывающая ситуацию движения, в которой параметры движения, используемые для управления вождением, беспрепятственно неправильно распознаются;
Фиг. 6 – это блок-схема последовательности операций, показывающая обработку определения неправильного распознавания, выполняемую посредством устройства определения неправильного распознавания, показанного на фиг. 1;
Фиг. 7 – это блок-схема последовательности операций, показывающая обработку корректировки весового коэффициента, выполняемую посредством устройства определения неправильного распознавания, показанного на фиг. 1; и
Фиг. 8 – это блок-схема последовательности операций, показывающая обработку управления рулением, выполняемую в качестве управления вождением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0012] Вариант осуществления настоящего изобретения описывается ниже со ссылкой на чертежи. В описании ниже одинаковый ссылочный номер используется для одного и того же или эквивалентного компонента, и излишнее описание не повторяется.
[0013] Фиг. 1 – это схема, показывающая схему конфигурации устройства 1 определения неправильного распознавания в одном варианте осуществления настоящего изобретения.
[0014] Как показано на фиг. 1, устройство 1 определения неправильного распознавания в варианте осуществления настоящего изобретения является устройством, установленным на транспортном средстве, для определения того, неправильно ли распознаются параметры движения, используемые для управления вождением транспортного средства. Параметры движения являются параметрами относительно движения, вычисленными на основе входных данных, полученных из данных обнаружения датчиков, установленных на транспортном средстве. Например, параметры движения являются параметрами, указывающими окружающую ситуацию движения или состояние движения транспортного средства. Более конкретно, параметрами движения являются изгиб дороги (полосы) движения, скорость изменения изгиба, угол поворота вокруг вертикальной оси транспортного средства, смещение, скорость поворота вокруг вертикальной оси, ширина полосы движения, число полос движения, расстояние и скорость относительно окружающих транспортных средств и т.д. Например, входные данные являются данными обнаружения о разметке полосы для полосы движения, данными позиции или данными траектории движения по движущемуся впереди транспортному средству, данными позиции по рассматриваемому транспортному средству и картографическими данными.
[0015] Это устройство 1 определения неправильного распознавания устанавливается, например, на транспортное средство, которое может выполнять автономное управление вождением. Т.е., устройство 1 определения неправильного распознавания устанавливается на транспортное средство, которое движется автономно по дороге движения без входного воздействия от пассажира транспортного средства. В описании ниже автономное вождение ссылается на технологию, которая предоставляет возможность транспортному средству двигаться автономно по дороге для движения. Например, автономное вождение включает в себя технологию, которая предоставляет возможность транспортному средству двигаться автономно по направлению к предварительно заданному пункту назначения без необходимости для водителя транспортного средства выполнять действие вождения. Автономное управление вождением необязательно означает, что управление вождением транспортного средства полностью выполняется автономно. Автономное вождение включает в себя движение, которое выполняется автономно, при этом не предполагается, что водитель, главным образом, будет ответственным за действие вождения. Более конкретно, управление рулением под управлением отслеживания полосы движения включено в автономное управление вождением.
[0016] Кроме того, устройство 1 определения неправильного распознавания может быть применено не только к устройству автономного управления вождением, но также к транспортному средству, в котором управление помощью вождению выполняется, пока вождение транспортного средства может управляться, главным образом, посредством системы управления. В этом варианте осуществления описывается пример, в котором устройство 1 определения неправильного распознавания устанавливается на транспортное средство, которое может выполнять автономное управление вождением.
[0017] Устройство 1 определения неправильного распознавания конфигурируется как электронный блок управления (ECU) 10. ECU 10, электронный блок управления, который выполняет управление определением неправильного распознавания для параметров движения, конфигурируется с помощью компьютера в качестве своего основного компонента, при этом компьютер включает в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM). Этот ECU 10 функционирует также как электронный блок управления для выполнения управления вождением транспортного средства. Подробности ECU 10 будут описаны позже в деталях.
[0018] С ECU 10 соединяются внешний датчик 2, блок 3 приема глобальной системы позиционирования (GPS), внутренний датчик 4, картографическая база данных 5, навигационная система 6, человеко-машинный интерфейс (HMI) 7, исполнительное устройство 8 и блок 9 связи.
[0019] Внешний датчик 2 является обнаруживающим устройством для обнаружения внешней обстановки, т.е., информации окружения о транспортном средстве. Внешний датчик 2 включает в себя, по меньшей мере, одно из камеры, радара и лазерного устройства формирования изображений, обнаружения и определения расстояния (лидара). Внешний датчик 2, который включает в себя камеру, радар и лидар, функционирует в качестве блока получения входных данных для получения входных данных об окружении движения или состоянии движения транспортного средства. Параметры движения транспортного средства вычисляются на основе этих входных данных.
[0020] Камера внешнего датчика 2 является устройством захвата изображений, которое захватывает внешнюю обстановку транспортного средства. Эта камера функционирует в качестве блока обнаружения для обнаружения разметки полосы движения, предусмотренной справа и слева от полосы движения, по которой транспортное средство движется, и отправляет данные изображения, сформированные посредством захвата разметки полосы движения, в ECU 10. Разметка полосы движения является линиями разметки полосы движения, предусмотренными на поверхности дороги для полосы движения, по одной для каждой из правой и левой сторон. Каждая разметка полосы движения может быть белой линией, желтой линией или линией других цветов. Кроме того, разметка полосы движения может быть сплошной линией или прерывистой линией и может быть одиночной линией или составной линией. Разметка полосы движения для полосы движения распознается на основе данных изображения, принятых от камеры, и, на основе распознанной разметки полосы движения, поперечная позиция транспортного средства относительно полосы движения, или смещение, может быть распознана в качестве параметра движения. Кроме того, посредством распознавания разметки полосы движения для полосы движения угол поворота вокруг вертикальной оси транспортного средства и изгиб и скорость изменения изгиба полосы движения могут быть распознаны в качестве параметров движения.
[0021] Камера предусматривается, например, на внутренней стороне ветрового стекла транспортного средства. Камера может быть монокулярной камерой или может быть стереокамерой. Стереокамера включает в себя два блока захвата, размещенных так, что несоответствие между правым глазом и левым глазом может быть воспроизведено. Информация, захваченная посредством стереокамеры, также включает в себя информацию в направлении глубины. Камера может быть использована в качестве блока обнаружения объекта, который обнаруживает окружающие объекты и окружающие транспортные средства, включающие в себя движущееся впереди транспортное средство и препятствие.
[0022] Радар обнаруживает препятствие снаружи транспортного средства или другие транспортные средства рядом с транспортным средством, включающие в себя движущееся впереди транспортное средство, с помощью радиоволны (например, миллиметровой волны). Радар обнаруживает препятствие, отправляя радиоволну в окружения транспортного средства и принимая радиоволну, отраженную препятствием или другими транспортными средствами. Радар отправляет информацию об обнаруженном препятствии в ECU 10. На основе обнаруженной информации, принятой от радара, данные позиции или данные траектории движения по движущемуся впереди транспортному средству распознаются в качестве входных данных. Когда функция датчика выполняется с помощью радара и камеры, желательно, чтобы информация приема по радиоволне отправлялась в ECU 10. В этом случае траектория движения движущегося впереди транспортного средства может распознаваться с помощью информации обнаружения, принятой от радара, и информации изображения, принятой от камеры.
[0023] Лидар обнаруживает препятствие снаружи транспортного средства или другие транспортные средства около транспортного средства, включающие в себя движущееся впереди транспортное средство, с помощью света. Лидар измеряет расстояние до точки отражения и обнаруживает препятствие, отправляя свет в окрестности транспортного средства и принимая свет, отраженный препятствием. Лидар отправляет информацию об обнаруженном препятствии в ECU 10. На основе информации обнаружения, принятой от лидара, данные позиции или данные траектории движения по движущемуся впереди транспортному средству распознаются в качестве входных данных. Когда функция датчика выполняется с помощью лидара и камеры, желательно, чтобы информация приема по отраженному свету отправлялась в ECU 10. В этом случае траектория движения движущегося впереди транспортного средства может распознаваться с помощью информации обнаружения, принятой от радара, и информации изображения, принятой от камеры. Два или более из камеры, лидара и радара не нужно обязательно устанавливать.
[0024] Блок 3 приема GPS принимает сигналы от трех или более GPS-спутников, чтобы измерять позицию транспортного средства (например, долготу и широту транспортного средства). Блок 3 приема GPS отправляет информацию об измеренной позиции по транспортному средству в ECU 10. Следует отметить, что вместо блока 3 приема GPS другой блок, который может идентифицировать долготу и широту транспортного средства, может быть использован. Функцию измерения направления транспортного средства, если доступна, желательно использовать в сравнении между измеренным результатом датчика и картографической информацией, которая будет описана позже.
[0025] Внутренний датчик 4 является обнаруживающим устройством, которое обнаруживает состояние движения транспортного средства, которое является рассматриваемым транспортным средством. Внутренний датчик 4 включает в себя, по меньшей мере, один из датчика скорости транспортного средства, датчика ускорения и датчика скорости поворота вокруг вертикальной оси. Датчик скорости транспортного средства является обнаруживающим устройством, которое обнаруживает скорость транспортного средства. Например, в качестве датчика скорости транспортного средства, используется датчик скорости колеса. Датчик скорости колеса предусматривается на колесах транспортного средства или на компоненте, таком как приводной вал, который вращается синхронно с колесами, чтобы обнаруживать скорость вращения колес. Датчик скорости транспортного средства отправляет информацию об обнаруженной скорости транспортного средства (информацию о скорости колеса) в ECU 10.
[0026] Датчик ускорения является обнаруживающим устройством, которое обнаруживает ускорение транспортного средства. Например, датчик ускорения включает в себя датчик продольного ускорения, который обнаруживает ускорение в продольном направлении транспортного средства, и датчик поперечного ускорения, который обнаруживает поперечное ускорение транспортного средства. Например, датчик ускорения отправляет информацию об ускорении по транспортному средству в ECU 10. Датчик скорости поворота вокруг вертикальной оси является обнаруживающим устройством, которое обнаруживает скорость поворота (угловую скорость поворота) вокруг вертикальной оси в центре тяжести транспортного средства. Например, гиродатчик может быть использован в качестве датчика угла поворота вокруг вертикальной оси. Датчик угла поворота вокруг вертикальной оси отправляет информацию об обнаруженном угле поворота вокруг вертикальной оси по транспортному средству в ECU 10 в качестве входных данных. Датчик угла поворота вокруг вертикальной оси функционирует в качестве блока получения информации для обнаружения угла поворота вокруг вертикальной оси, одного из параметров движения транспортного средства.
[0027] Датчик угла поворота рулевого колеса и датчик момента рулевого управления могут также быть предусмотрены в качестве внутреннего датчика 4. Датчик угла поворота рулевого колеса является устройством обнаружения, которое обнаруживает угол поворота рулевого колеса транспортного средства. Этот датчик угла поворота рулевого колеса отправляет информацию об обнаруженном угле поворота рулевого колеса в ECU 10 в качестве входных данных. Датчик угла поворота рулевого колеса функционирует в качестве блока получения информации для обнаружения угла поворота вокруг вертикальной оси, одного из параметров движения транспортного средства. Датчик момента рулевого управления является устройством обнаружения, которое обнаруживает момент рулевого управления рулевого колеса транспортного средства. Этот датчик момента рулевого управления отправляет информацию об обнаруженном моменте рулевого управления в ECU 10 в качестве входных данных. Датчик момента рулевого управления функционирует в качестве блока получения информации для обнаружения угла поворота вокруг вертикальной оси, одного из параметров движения транспортного средства.
[0028] Картографическая база данных 5 является базой данных, которая хранит картографическую информацию. Например, картографическая база данных формируется на накопителе на жестком диске (HDD), установленном в транспортном средстве. Картографическая информация включает в себя информацию позиции о дорогах, информацию о форме дороги (например, изгиб, скорость изменения изгиба, ширина полосы движения, число полос движения и т.д.) и информацию позиции о перекрестках и дорожных развязках. Кроме того, чтобы использовать информацию позиции об ограждающих структурах, таких как здание или стена, и технологию одновременной локализации и картирования (SLAM), желательно, чтобы картографическая информация включала в себя выходной сигнал внешнего датчика 2. Картографическая база данных может также быть сохранена в компьютере в учреждениях, таких как центр обработки информации, которые могут связываться с транспортным средством.
[0029] Навигационная система 6 является устройством, которое направляет водителя транспортного средства к пункту назначения, который задан водителем транспортного средства. Навигационная система 6 вычисляет маршрут, по которому транспортное средство будет двигаться, на основе информации позиции о транспортном средстве, измеренной посредством блока 3 приема GPS и картографической информации, сохраненной в картографической базе данных 5. Маршрут может быть подходящим образом идентифицированной полосой движения в многополосной области. Навигационная система 6 вычисляет целевой маршрут от позиции транспортного средства до пункта назначения и информирует водителя о целевом маршруте через отображение на устройстве отображения или через голосовой вывод из динамика. Навигационная система 6 отправляет информацию о целевом маршруте транспортного средства в ECU 10. Навигационная система 6 может также быть сохранена в компьютере в учреждениях, таких как центр обработки информации, которые могут связываться с транспортным средством.
[0030] Эта навигационная система 6 может отправлять данные позиции транспортного средства и картографические данные о дороге движения в этой позиции транспортного средства в ECU 10 в качестве входных данных. Эта навигационная система 6 функционирует как блок получения информации, который получает информацию, такую как изгиб полосы движения, скорость изменения изгиба и т.д.
[0031] Блок 9 связи является устройством связи, которое связывается с устройством, внешним по отношению к транспортному средству. Например, в качестве блока 9 связи используется устройство связи "транспортное средство-транспортное средство", которое связывается с другими транспортными средствами, устройство связи "дорога-транспортное средство", которое выполняет связь с инфраструктурой, или устройство связи, которое связывается с человеком (например, связь с терминальным устройством, носимым человеком). Этот блок 9 связи может получать информацию позиции или информацию о скорости транспортного средства по другим транспортным средствам и информацию позиции или информацию о движении относительно пешеходов и отправляет полученную информацию в ECU 10 в качестве входных данных. Этот блок 9 связи функционирует в качестве блока получения информации, который получает изгиб и скорость изменения изгиба полосы движения, которые являются параметрами движения транспортного средства. Кроме того, блок 9 связи может отправлять параметры движения, вычисленные посредством ECU 10, блоку, внешнему по отношению к транспортному средству, для использования в качестве информации параметра движения для облачного вычисления.
[0032] HMI 7 является интерфейсом для вывода и ввода информации между пассажирами (включающими в себя водителя) транспортного средства и устройством 1 определения неправильного распознавания. HMI 7 имеет панель отображения для отображения информации изображения пассажирам, динамик для вывода голосов и кнопки управления или сенсорную панель, чтобы предоставлять возможность пассажирам выполнять операции ввода. Когда пассажир выполняет операцию ввода, чтобы начинать или прекращать автономное управление вождением, HMI 7 выводит сигнал в ECU 10, чтобы начинать или прекращать автономное управление вождением. Когда транспортное средство достигает пункта назначения, где автономное управление вождением должно быть завершено, HMI 7 информирует пассажиров о том, что транспортное средство достигнет пункта назначения. HMI 7 может выводить информацию пассажирам с помощью беспроводным образом соединенного мобильного информационного терминала или может принимать операцию ввода от пассажира с помощью мобильного информационного терминала.
[0033] Исполнительное устройство 8 является устройством, которое выполняет автономное управление вождением транспортного средства. Исполнительное устройство 8 включает в себя, по меньшей мере, исполнительное устройство дроссельной заслонки, исполнительное устройство тормоза и исполнительное устройство рулевого управления. Исполнительное устройство дроссельной заслонки управляет объемом воздуха, который должен быть подан в двигатель (углом дроссельной заслонки), согласно управляющему сигналу от ECU 10, чтобы управлять движущей силой транспортного средства. Когда транспортное средство является гибридным транспортным средством или электрическим транспортным средством, исполнительное устройство 8 не включает в себя исполнительное устройство дроссельной заслонки, и, в этом случае, управляющий сигнал отправляется от ECU 10 к мотору, который является источником мощности, чтобы управлять движущей силой.
[0034] Исполнительное устройство тормоза управляет тормозной системой согласно управляющему сигналу, принятому от ECU 10, чтобы управлять управляющей силой, которая должна быть приложена к колесам транспортного средства. В качестве тормозной системы может быть использована гидравлическая тормозная система. Исполнительное устройство рулевого управления управляет движением вспомогательного мотора, одного компонента системы электроусилителя руля для управления моментом рулевого управления, согласно управляющему сигналу, принятому от ECU 10. Таким образом, исполнительное устройство рулевого управления управляет моментом рулевого управления транспортного средства.
[0035] Внешний датчик 2, блок 3 приема GPS, внутренний датчик 4, картографическая база данных 5, навигационная система 6 и блок 9 связи, описанные выше, являются устройствами, каждое из которых функционирует в качестве блока получения информации, который получает информацию для вычисления входных данных и параметров движения, используемых для управления вождением транспортного средства. Однако, в зависимости от содержимого управления вождением, один или более из внешнего датчика 2, блока 3 приема GPS, внутреннего датчика 4, картографической базы данных 5, навигационной системы 6 и блока 9 связи не устанавливаются.
[0036] ECU 10 включает в себя блок 11 распознавания внешней обстановки, блок 12 распознавания позиции транспортного средства, блок 13 распознавания состояния движения, блок 14 формирования плана движения, блок 15 управления движением и устройство 1 определения неправильного распознавания.
[0037] Блок 11 распознавания внешней обстановки распознает внешнюю обстановку транспортного средства на основе результата обнаружения внешнего датчика 2 (например, информации, захваченной посредством камеры, информации о препятствии, обнаруженной посредством радара, и информации о препятствии, обнаруженной посредством лидара) или информации картографических данных. Внешняя обстановка включает в себя ширину полосы движения дороги, форму дороги (например, изгиб и скорость изменения изгиба полосы движения, изменение в уклоне дорожной поверхности и неровности поверхности, эффективно используемые для оценки вида посредством внешнего датчика 2, и перекресток, ответвление и слияние дорог и т.д.), положение других транспортных средств около транспортного средства (например, позицию движущегося впереди транспортного средства, скорость транспортного средства для движущегося впереди транспортного средства и траекторию движения движущегося впереди транспортного средства и т.д.), и положение препятствий около транспортного средства (например, информацию для различения между неподвижными препятствиями и движущимися препятствиями, позицию препятствия около транспортного средства, направление движения препятствия около транспортного средства и относительную скорость препятствия около транспортного средства). Представляется возможным сравнивать результат обнаружения внешнего датчика 2 и картографическую информацию, чтобы увеличивать точность в позиции и направлении транспортного средства, полученной посредством блока 3 приема GPS.
[0038] Блок 11 распознавания внешней обстановки может функционировать в качестве блока вычисления параметров движения для вычисления параметров движения. Например, блок 11 распознавания внешней обстановки вычисляет изгиб полосы движения и скорость изменения изгиба, которые являются параметрами движения. Более конкретно, блок 11 распознавания внешней обстановки принимает информацию изображения от камеры, распознает разметку полосы движения из информации изображения и, на основе формы разметки полосы движения, вычисляет изгиб и скорость изменения изгиба полосы движения или дороги для движения впереди транспортного средства. В этом случае, данные распознавания или данные обнаружения по разметке полосы движения являются входными данными. Кроме того, блок 11 распознавания внешней обстановки распознает траекторию движения движущегося впереди транспортного средства на основе информации изображения, принятой от камеры, и информации обнаружения, принятой от радара или лидара, и, на основе траектории движения движущегося впереди транспортного средства, вычисляет изгиб и скорость изменения изгиба полосы движения или дороги для движения впереди транспортного средства. В этом случае, данные траектории движения по движущемуся впереди транспортному средству являются входными данными. Кроме того, блок 11 распознавания внешней обстановки вычисляет изгиб и скорость изменения изгиба полосы движения или дороги для движения впереди транспортного средства на основе картографических данных, принятых от навигационной системы 6. В этом случае, данные текущей позиции транспортного средства и картографические данные являются входными данными.
[0039] Блок 11 распознавания внешней обстановки функционирует в качестве блока распознавания ситуации движения, который распознает ситуацию движения транспортного средства. Например, блок 11 распознавания внешней обстановки распознает любую из следующих ситуаций движения в качестве ситуации движения транспортного средства: ситуация движения, в которой трудно обнаруживать разметку полосы движения, поскольку существует движущееся впереди транспортное средство в точке разветвления, ситуация движения около выезда из туннеля, ситуация движения, в которой автомобиль большого размера движется в сторону движущегося впереди транспортного средства, и ситуация движения в городской области, окруженной зданиями больше предварительно определенного размера. Ситуация движения ссылается на обстановку движения транспортного средства, которая распознается в качестве окружающей обстановки движения или состояния окружения движения транспортного средства. Способ распознавания ситуации движения должен идентифицировать и распознавать ситуацию движения на основе положения других окружающих транспортных средств, полученного посредством радиолокационного обнаружения, а также на основе картографической информации. В частности, также представляется возможным предварительно задавать ситуации движения, в которых параметры движения одинакового типа неправильно распознаются в одно и то же время, и определять, соответствует ли текущая ситуация движения одной из предварительно заданных ситуаций движения. Данные по ситуациям движения могут также быть предварительно записаны с этими данными, ассоциированными с картографическими данными.
[0040] Блок 12 распознавания позиции транспортного средства распознает позицию транспортного средства (далее в данном документе, называемую "позицией транспортного средства") на карте на основе информации позиции по транспортному средству, принятой посредством блока 3 приема GPS, и картографической информации, сохраненной в картографической базе данных 5. Блок 12 распознавания позиции транспортного средства может также распознавать позицию транспортного средства, получая позицию транспортного средства, которая используется навигационной системой 6, от навигационной системы 6. Когда позиция транспортного средства может быть измерена посредством датчика, установленного вне транспортного средства, например, на дороге, блок 12 распознавания позиции транспортного средства может получать позицию транспортного средства от этого датчика через связь. Кроме того, блок 12 распознавания позиции транспортного средства распознает позицию транспортного средства на полосе движения на основе информации, захваченной посредством камеры внешнего датчика 2.
[0041] Блок 12 распознавания позиции транспортного средства может функционировать в качестве блока вычисления параметров движения для вычисления параметров движения. Например, блок 12 распознавания позиции транспортного средства вычисляет поперечную позицию относительно полосы движения, или смещение, которое является параметром движения. Более конкретно, блок 12 распознавания позиции транспортного средства распознает разметку полосы движения из информации изображения, принятой от камеры, и, на основе разметки полосы движения, вычисляет смещение транспортного средства. Кроме того, блок 12 распознавания позиции транспортного средства может вычислять смещение транспортного средства на основе картографических данных и информации позиции транспортного средства, принятой посредством блока 3 приема GPS.
[0042] Блок 13 распознавания состояния движения распознает состояние движения транспортного средства, которое является рассматриваемым транспортным средством, на основе результата обнаружения внутреннего датчика 4 (информации о скорости транспортного средства, обнаруженной посредством датчика скорости транспортного средства, информации об ускорении, обнаруженной посредством датчика ускорения, информации о скорости поворота вокруг вертикальной оси, обнаруженной посредством датчика скорости поворота вокруг вертикальной оси, информации об угле поворота рулевого управления, обнаруженной посредством датчика угла поворота рулевого колеса, информации о моменте рулевого управления, обнаруженной посредством датчика момента рулевого управления, и т.д.). Например, состояние движения транспортного средства включает в себя скорость транспортного средства, ускорение, скорость поворота вокруг вертикальной оси и угол поворота вокруг вертикальной оси.
[0043] Этот блок 13 распознавания состояния движения может функционировать в качестве блока вычисления параметров движения для вычисления параметров движения. Например, блок 13 распознавания состояния движения вычисляет угол поворота вокруг вертикальной оси транспортного средства, который является одним из параметров движения. Более конкретно, блок 13 распознавания состояния движения распознает разметку полосы движения и т.д. из информации изображения, принятой от камеры, и, на основе разметки полосы движения и т.д., вычисляет угол поворота вокруг вертикальной оси транспортного средства. Кроме того, блок 13 распознавания состояния движения может вычислять угол поворота вокруг вертикальной оси транспортного средства на основе картографических данных и временного изменения в информации позиции транспортного средства, принятой посредством блока 3 приема GPS. Блок 13 распознавания состояния движения может также вычислять угол поворота вокруг вертикальной оси транспортного средства на основе информации о скорости поворота вокруг вертикальной оси, обнаруженной посредством датчика скорости поворота вокруг вертикальной оси. Блок 13 распознавания состояния движения может также вычислять угол поворота вокруг вертикальной оси транспортного средства на основе информации, обнаруженной посредством датчика угла поворота рулевого колеса или датчика момента рулевого управления.
[0044] Блок 14 формирования плана движения формирует целевой путь движения транспортного средства на основе целевого маршрута, вычисленного посредством навигационной системы 6, позиции транспортного средства, распознанной посредством блока 12 распознавания позиции транспортного средства, и внешней обстановки транспортного средства (включающей в себя позицию транспортного средства и направление), распознанной посредством блока 11 распознавания внешней обстановки. Целевой путь движения является траекторией, по которой транспортное средство будет двигаться по целевому маршруту. Блок 14 формирования плана движения формирует путь так, что транспортное средство движется плавно по целевому маршруту с точки зрения безопасности, согласованности регулирования и эффективности движения. В этом случае, блок 14 формирования плана движения формирует путь транспортного средства таким образом, что транспортное средство будет избегать контакта с препятствием на основе положения препятствий рядом с транспортным средством.
[0045] Целевой маршрут, упомянутый здесь, включает в себя маршрут движения, сформированный автоматически на основе внешней и картографической информации, когда пункт назначения явно не указан водителем. Примером такого маршрута движения является маршрут следования по дороге в "устройстве помощи вождению", описанном в японском патенте № 5382218 (WO2011/158347) или в "устройстве автономного вождения", описанном в публикации японской патентной заявки № 2011-162132 (JP 2011-162132 A).
[0046] Блок 14 формирования плана движения формирует план движения согласно сформированному пути. Т.е., блок 14 формирования плана движения формирует план движения по предварительно заданному целевому маршруту на основе, по меньшей мере, внешнего положения, которое является информацией окружения по транспортному средству, а также на основе картографической информации, сохраненной в картографической базе данных 5. Предпочтительно, блок 14 формирования плана движения выводит сформированный план движения в форме, в которой курс транспортного средства представляется посредством множества наборов, или координат (p, v) конфигурации, каждый состоит из двух элементов, целевой позиции p в фиксированной в транспортном средстве системе координат и скорости v в каждой целевой точке. Каждая целевая позиция p, по меньшей мере, имеет информацию по позициям x-координаты и y-координаты в фиксированной в транспортном средстве системе координат или информацию, эквивалентную этой информации. План движения не ограничивается конкретной формой, пока план указывает поведение транспортного средства. Например, в плане движения, целевое время t может быть использовано вместо скорости v, или целевое время t и направление транспортного средства в это время могут быть добавлены.
[0047] Обычно, план движения представляется достаточно посредством данных, указывающих признак, который находится приблизительно в нескольких секундах от текущего времени. Однако, поскольку несколько десятков секунд данных требуется в зависимости от обстановки, например, когда транспортное средство будет поворачивать направо на перекрестке, или транспортное средство будет пропускать другое транспортное средство, желательно, чтобы число координат конфигурации плана движения было переменным, и чтобы расстояние между координатами конфигурации было переменным. К тому же, кривая, соединяющая координаты конфигурации, может быть аппроксимирована посредством сплайн-функции, и параметры этой кривой могут быть использованы в качестве плана движения. Чтобы формировать план движения, любой известный способ, который может описывать поведение транспортного средства, может быть использован.
[0048] План движения может быть представлен посредством данных, указывающих изменение в скорости транспортного средства, ускорение/замедление и момент рулевого управления транспортного средства, которые будут применяться, когда транспортное средство движется по курсу по целевому маршруту. План движения может включать в себя шаблон скорости, шаблон ускорения/замедления и шаблон рулевого управления транспортного средства. Блок 14 формирования плана движения, описанный выше, может формировать план движения, так что время движения (время, требуемое, чтобы транспортное средство достигло пункта назначения) минимизируется.
[0049] Впрочем, шаблон скорости ссылается на данные, состоящие из целевых скоростей транспортного средства, каждая из которых задается ассоциированной со временем в каждой из целевых контрольных позиций, которые задаются по курсу с предварительно определенным интервалом (например, 1 м). Шаблон ускорения/замедления ссылается на данные, состоящие из целевых значений ускорения/замедления транспортного средства, каждое из которых задается ассоциированным со временем в каждой из целевых контрольных позиций, которые задаются по курсу с предварительно определенным интервалом (например, 1 м). Шаблон рулевого управления ссылается на данные, состоящие из целевых моментов рулевого управления, каждый из которых задается ассоциированным со временем в каждой из целевых контрольных позиций, которые задаются по курсу с предварительно определенным интервалом (например, 1 м).
[0050] Пример формирования плана движения описывается ниже более конкретно. Блок 14 формирования плана движения вычисляет целевой угол поворота рулевого колеса на основе изгиба полосы движения, скорости изменения изгиба, поперечной позиции транспортного средства и угла поворота вокруг вертикальной оси, все из которых являются параметрами движения. Для изгиба полосы движения и скорости изменения изгиба может быть использована информация, распознанная посредством блока 11 распознавания внешнего положения. Для поперечной позиции транспортного средства может быть использована информация, распознанная посредством блока 12 распознавания позиции транспортного средства. Для угла поворота вокруг вертикальной оси транспортного средства может быть использована информация, распознанная посредством блока 13 распознавания состояния движения. После этого вычисления блок 14 формирования плана движения вычисляет целевой момент рулевого управления, чтобы реализовать целевой угол поворота рулевого колеса транспортного средства. Вычисленный целевой момент рулевого управления выводится из блока 14 формирования плана движения в блок 15 управления движением.
[0051] Блок 15 управления движением автономно управляет движением транспортного средства на основе плана движения, сформированного посредством блока 14 формирования плана движения. Блок 15 управления движением выводит управляющий сигнал, сформированный согласно плану движения, к исполнительному устройству 8. При этом, блок 15 управления движением управляет движением транспортного средства, так что транспортное средство автономно движется по плану движения.
[0052] Устройство 1 определения неправильного распознавания включает в себя блок 16 вычисления параметров движения, блок 17 вычисления различия, блок 18 задания весовых коэффициентов и блок 19 определения.
[0053] Блок 16 вычисления параметров движения вычисляет параметры движения на основе входных данных для вычисления, по меньшей мере, трех параметров движения одинакового типа. Например, с помощью данных распознавания по разметке полосы движения, полученных из информации изображения от камеры, в качестве первых входных данных, блок 16 вычисления параметров движения вычисляет изгиб дороги для движения в качестве первого параметра движения на основе первых входных данных. Аналогично, с помощью данных распознавания по траектории движения движущегося впереди транспортного средства, полученных из информации изображения от камеры, в качестве вторых входных данных, блок 16 вычисления параметров движения вычисляет изгиб дороги для движения в качестве второго параметра движения на основе вторых входных данных. Аналогично, с помощью информации позиции транспортного средства и картографических данных в навигационной системе 6 в качестве третьих входных данных, блок 16 вычисления параметров движения вычисляет изгиб дороги для движения в качестве третьего параметра движения на основе третьих входных данных. Таким образом, блок 16 вычисления параметров движения вычисляет один и тот же тип параметров движения множество раз на основе первых входных данных, вторых входных данных и третьих входных данных, которые отличаются друг от друга.
[0054] Блок 16 вычисления параметров движения может вычислять три или более параметров движения одинакового типа на основе трех или более частей входных данных. Например, в дополнение к первому параметру движения, второму параметру движения и третьему параметру движения, блок 16 вычисления параметров движения может вычислять четвертый параметр движения на основе четвертых входных данных. Кроме того, блок 16 вычисления параметров движения может вычислять параметр движения, отличный от изгиба, такой как скорость изменения изгиба, угол поворота вокруг вертикальной оси транспортного средства или смещение. Если блок 11 распознавания внешней обстановки, блок 12 распознавания позиции транспортного средства и блок 13 распознавания состояния движения, описанные выше, конфигурируются, чтобы функционировать в качестве блока вычисления параметров движения, блок 16 вычисления параметров движения может не устанавливаться.
[0055] Блок 17 вычисления различия вычисляет значение различия между каждыми двумя из параметров движения, которые вычисляются посредством блока 16 вычисления параметров движения, и которые отличаются друг от друга. Например, блок 17 вычисления различия вычисляет, по меньшей мере, первое различие, т.е., различие между первым параметром движения и вторым параметром движения, которые вычисляются посредством блока 16 вычисления параметров движения, второе различие, т.е., различие между первым параметром движения и третьим параметром движения, и третье различие, т.е., различие между вторым параметром движения и третьим параметром движения. Различие между параметрами движения вычисляется, например, вычитанием одного из параметров движения из другого параметра движения и посредством вычисления абсолютного значения результирующего значения. Кроме того, для четырех или более параметров движения, блок 17 вычисления различия может вычислять различие между параметрами движения, которые отличаются друг от друга. Например, когда четыре параметра движения, т.е., первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения, вычисляются, блок 17 вычисления различия вычисляет первое различие, второе различие, третье различие, четвертое различие, т.е., различие между первым параметром движения и четвертым параметром движения, пятое различие, т.е., различие между вторым параметром движения и четвертым параметром движения, и шестое различие, т.е., различие между третьим параметром движения и четвертым параметром движения.
[0056] Блок 18 задания весовых коэффициентов задает весовой коэффициент согласно ортогональности между одной частью входных данных и другой частью входных данных в конкретной обстановке движения транспортного средства. Например, когда существуют три части входных данных, т.е., первые входные данные, вторые входные данные и третьи входные данные, по меньшей мере, следующие три весовых коэффициента задаются: первый весовой коэффициент согласно ортогональности между первыми входными данными и вторыми входными данными в ситуации движения транспортного средства, второй весовой коэффициент согласно ортогональности между первыми входными данными и третьими входными данными в ситуации движения и третий весовой коэффициент согласно ортогональности между вторыми входными данными и третьими входными данными в обстановке движения. Первый весовой коэффициент является весовым коэффициентом, на который различие между первым параметром движения на основе первых входных данных и вторым параметром движения на основе вторых входных данных умножается. Второй весовой коэффициент является весовым коэффициентом, на который различие между первым параметром движения на основе первых входных данных и третьим параметром движения на основе третьих входных данных умножается. Третий весовой коэффициент является весовым коэффициентом, на который различие между вторым параметром движения на основе вторых входных данных и третьим параметром движения на основе третьих входных данных умножается. В качестве ситуации движения транспортного средства ситуация движения, распознанная посредством блока 11 распознавания внешней обстановки, описанного выше, может быть использована.
[0057] Когда существуют четыре или более частей входных данных, блок 18 задания весовых коэффициентов задает весовой коэффициент согласно ортогональности между каждыми двумя частями входных данных, которые отличаются друг от друга. Например, когда существуют четыре части входных данных, т.е., когда существуют первые входные данные, вторые входные данные, третьи входные данные и четвертые входные данные, по меньшей мере, следующие шесть весовых коэффициентов задаются: первый весовой коэффициент согласно ортогональности между первыми входными данными и вторыми входными данными в ситуации движения транспортного средства, второй весовой коэффициент согласно ортогональности между первыми входными данными и третьими входными данными в ситуации движения, третий весовой коэффициент согласно ортогональности между вторыми входными данными и третьими входными данными в ситуации движения, четвертый весовой коэффициент согласно ортогональности между первыми входными данными и четвертыми входными данными в ситуации движения, пятый весовой коэффициент согласно ортогональности между вторыми входными данными и четвертыми входными данными в ситуации движения и шестой весовой коэффициент согласно ортогональности между третьими входными данными и четвертыми входными данными в ситуации движения.
[0058] Блок 18 задания весовых коэффициентов задает весовой коэффициент таким способом, что чем выше ортогональность между двумя частями входных данных в ситуации движения транспортного средства, тем больше весовой коэффициент. Т.е., когда существуют три части входных данных, т.е., первые входные данные, вторые входные данные и третьи входные данные, блок 18 задания весовых коэффициентов задает больший первый весовой коэффициент, когда ортогональность между первыми входными данными и вторыми входными данными в обстановке движения транспортного средства является более высокой, больший второй весовой коэффициент, когда ортогональность между первыми входными данными и третьими входными данными в обстановке движения является более высокой, и больший третий весовой коэффициент, когда ортогональность между вторыми входными данными и третьими входными данными в обстановке движения является более высокой. Например, когда ортогональность между первыми входными данными и вторыми входными данными в ситуации движения транспортного средства выше ортогональности между первыми входными данными и третьими входными данными, первый весовой коэффициент задается более высоким, чем второй весовой коэффициент.
[0059] В этом описании ортогональность между входными данными означает свойство, что множество частей входных данных трудно неправильно распознать или неправильно обнаружить в одно и то же время. Т.е., высокая ортогональность означает, что неправильное распознавание или неправильное обнаружение множества частей входных данных менее вероятно должно происходить в одно и то же время. Следовательно, задание большего значения для весового коэффициента, на который различие между параметрами движения на основе входных данных с высокой ортогональностью умножается, может увеличивать значение, сформированное умножением различия на весовой коэффициент, таким образом, делая возможным увеличение точности в определении неправильного распознавания параметров движения на основе этого значения.
[0060] Задание весового коэффициента описывается ниже подробно. Поскольку беспрепятственно неправильно распознанные входные данные и параметры движения изменяются согласно ситуации движения транспортного средства, весовой коэффициент задается согласно ситуации движения.
[0061] Например, когда ситуация движения рассматриваемого транспортного средства 70 является такой, что рассматриваемое транспортное средство 70 движется рядом с разветвлением дороги для движения, как показано на фиг. 2, разметка 72 полосы движения в прямом направлении впереди не может быть распознана вследствие тени движущегося впереди транспортного средства 71, и, кроме того, движущееся впереди транспортное средство 71 покидает полосу движения, приводя в результате к тому, что траектория движущегося впереди транспортного средства распознается некорректно. Т.е., данные распознавания разметки полосы движения, указанные посредством информации изображения с камеры, и данные траектории движущегося впереди транспортного средства, указанные посредством информации обнаружения от радара, неправильно распознаются в одно и то же время. С другой стороны, данные позиции транспортного средства, принятые от GPS-датчика, не распознаются неправильно, и, следовательно, изгиб дороги для движения на основе картографических данных, полученных посредством обращения к данным позиции транспортного средства, может быть распознан корректно. По этой причине, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства ниже ортогональности между данными распознавания разметки полосы движения и картографическими данными и ортогональности между данными траектории движущегося впереди транспортного средства и картографическими данными. Другими словами, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и картографическими данными и ортогональность между данными траектории движущегося впереди транспортного средства и картографическими данными выше ортогональности между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства. Следовательно, весовой коэффициент, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе картографических данных умножается, и весовой коэффициент, на который различие между изгибом на основе данных траектории движущегося впереди транспортного средства и изгиба на основе картографических данных умножается, задаются больше весового коэффициента, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе данных траектории движущегося впереди транспортного средства умножается.
[0062] Когда ситуация движения транспортного средства является такой, что транспортное средство движется рядом с выездом 73 из туннеля, как показано на фиг. 3, трудно обнаруживать разметку полосы движения вследствие фоновой засветки и, кроме того, GPS-сигнал не может быть принят, приводя в результате к тому, что картографические данные не могут быть получены правильно. Т.е., данные распознавания разметки полосы движения, указанные посредством информации изображения от камеры, и картографические данные могут быть неправильно распознаны в одно и то же время. С другой стороны, данные траектории движущегося впереди транспортного средства от радара могут быть получены правильно. По этой причине, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и картографическими данными ниже ортогональности между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства и ортогональности между картографическими данными и данными траектории движущегося впереди транспортного средства. Другими словами, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства и ортогональность между картографическими данными и данными траектории движущегося впереди транспортного средства выше ортогональности между данными распознавания разметки полосы движения и картографическими данными. Следовательно, весовой коэффициент, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе данных траектории движущегося впереди транспортного средства умножается, и весовой коэффициент, на который различие между изгибом на основе картографических данных и изгиба на основе данных траектории движущегося впереди транспортного средства умножается, задаются больше весового коэффициента, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе картографических данных умножается.
[0063] Когда ситуация движения транспортного средства является такой, что транспортное средство движется в городской области, как показано на фиг. 4, становится трудно принимать GPS-сигнал, поскольку сигнал блокируется зданиями, и, кроме того, становится трудно обнаруживать разметку 72 полосы движения вследствие тени 74 здания. Т.е., данные распознавания разметки полосы движения, указанные посредством информации изображения от камеры, и картографические данные могут быть неправильно распознаны в одно и то же время. С другой стороны, данные траектории движущегося впереди транспортного средства, обнаруженные посредством радара, могут быть получены правильно. По этой причине, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и картографическими данными ниже ортогональности между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства и ортогональности между картографическими данными и данными траектории движущегося впереди транспортного средства. Другими словами, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства и ортогональность между картографическими данными и данными траектории движущегося впереди транспортного средства выше ортогональности между данными распознавания разметки полосы движения и картографическими данными. Следовательно, весовой коэффициент, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе данных траектории движущегося впереди транспортного средства умножается, и весовой коэффициент, на который различие между изгибом на основе картографических данных и изгиба на основе данных траектории движущегося впереди транспортного средства умножается, задаются больше весового коэффициента, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе картографических данных умножается.
[0064] Когда ситуация движения является такой, что транспортное средство следует за движущимся впереди транспортным средством 71, которое движется в сторону автомобиля 75 большого размера, как показано на фиг. 5, становится трудно обнаруживать разметку 72 полосы движения вследствие тени 76 автомобиля 75 большого размера, и, кроме того, движущееся впереди транспортное средство 71 движется рядом с краем полосы движения, приводя в результате к тому, что траектория движущегося впереди транспортного средства некорректна. Т.е., данные распознавания разметки полосы движения, указанные посредством информации изображения с камеры, и данные траектории движущегося впереди транспортного средства, указанные посредством информации обнаружения от радара, неправильно распознаются в одно и то же время. С другой стороны, данные позиции транспортного средства, принятые от GPS-датчика, не распознаются неправильно, и, следовательно, картографические данные, полученные посредством ссылки на данные позиции транспортного средства, могут быть распознаны корректно. По этой причине, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства ниже ортогональности между данными распознавания разметки полосы движения и картографическими данными и ортогональности между данными траектории движущегося впереди транспортного средства и картографическими данными. Другими словами, в этой ситуации движения, ортогональность между данными распознавания разметки полосы движения и картографическими данными и ортогональность между данными траектории движущегося впереди транспортного средства и картографическими данными выше ортогональности между данными распознавания разметки полосы движения и данными траектории движущегося впереди транспортного средства. Следовательно, весовой коэффициент, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе картографических данных умножается, и весовой коэффициент, на который различие между изгибом на основе данных траектории движущегося впереди транспортного средства и изгиба на основе картографических данных умножается, задаются больше весового коэффициента, на который различие между изгибом на основе данных распознавания разметки полосы движения и изгибом на основе данных траектории движущегося впереди транспортного средства умножается.
[0065] В любой из других ситуаций движения, когда множество частей входных данных неправильно распознается в одно и то же время, весовой коэффициент может быть задан таким образом, что чем выше ортогональность между одной частью входных данных и другой частью входных данных, соответствующих этой ситуации движения, тем большим может быть задан весовой коэффициент, на который различие между параметрами движения на основе этих входных данных умножается. В примере, описанном выше, изгиб используется в качестве примера параметра движения. Для других параметров движения, также, весовой коэффициент может быть задан таким образом, что чем выше ортогональность между одной частью входных данных и другой частью входных данных, соответствующих этой ситуации движения, тем большим может задаваться весовой коэффициент, на который различие между параметрами движения на основе этих входных данных умножается.
[0066] На фиг. 1, когда водитель выполняет действие переключения на ручное вождение во время управления вождением транспортного средства, блок 18 задания весовых коэффициентов сбрасывает весовые коэффициенты, используемые в обстановке движения, соответствующей времени, когда водитель выполняет действие переключения на ручное вождение, так что блок определения, который будет описан позже, более простым образом определяет, что происходит неправильное распознавание, чем когда водитель не выполняет действие переключения на ручное вождение. Т.е., когда блок 18 задания весовых коэффициентов имеет функцию, чтобы корректировать, обновлять или изучать весовые коэффициенты, когда автономное управление переключается на ручное вождение. Действие переключения на ручное вождение, выполняемое водителем, является действием, выполняемым во время управления действием, таким как действие ручного вождения на рулевом колесе или воздействие на кнопку переключения на ручное вождение. Водитель выполняет действие переключения на ручное вождение работой во время управления работой транспортного средства, поскольку управление работой вероятно должно быть некорректным, и, в этом случае, весовые коэффициенты корректируются. Например, когда первый параметр движения, второй параметр движения и третий параметр движения используются во время управления вождением, первый весовой коэффициент, второй весовой коэффициент и третий весовой коэффициент используются в качестве весовых коэффициентов, на которые различие между параметрами движения умножается. В этом случае, по меньшей мере, один из первого весового коэффициента, второго весового коэффициента и третьего весового коэффициента корректируется.
[0067] Более конкретно, корректировка выполняется таким образом, что весовой коэффициент, на который умножается различие между двумя параметрами движения, которые являются любыми двумя из первого параметра движения, второго параметра движения и третьего параметра движения, и которые имеют аналогичное значение, уменьшается. Вместо или в дополнение к этой корректировке, корректировка может быть выполнена таким образом, что весовые коэффициенты, отличные от весового коэффициента, на который умножается различие между двумя параметрами движения, имеющими одинаковое значение, увеличиваются. Кроме того, корректировка может быть выполнена таким образом, что весовые коэффициенты, на которые умножается различие, соответствующее параметру движения, имеющему самое отличающееся значение, увеличиваются. Выполняя корректировку, как описано выше, значения, каждое из которых сформировано умножением различия между параметрами движения на весовой коэффициент, могут быть увеличены, и, при определении неправильного распознавания параметров движения с помощью величины значений, определение неправильного распознавания может быть выполнено более точно.
[0068] Блок 19 определения определяет, обнаруживается ли неправильное распознавание в параметрах движения, с помощью значений, каждое из которых сформировано умножением весового коэффициента на различие между параметрами движения. Т.е., блок 19 определения определяет, обнаруживается ли неправильное распознавание в группе параметров, включающей в себя множество параметров движения, с помощью значений, каждое из которых сформировано умножением весового коэффициента на различие между параметрами движения. Например, когда первый параметр движения, второй параметр движения и третий параметр движения вычисляются в качестве параметров движения одинакового типа, блок 19 определения определяет, обнаруживается ли неправильное распознавание в группе параметров, которая включает в себя первый параметр движения, второй параметр движения и третий параметр движения, с помощью значения, сформированного умножением первого различия, которое является различием между первым параметром движения и вторым параметром движения, на первый весовой коэффициент, значения, сформированного умножением второго различия, которое является различием между первым параметром движения и третьим параметром движения, на второй весовой коэффициент, и значения, сформированного умножением третьего различия, которое является различием между вторым параметром движения и третьим параметром движения, на третий весовой коэффициент. Аналогично, когда первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения вычисляются в качестве параметров движения одинакового типа, блок 19 определения определяет, обнаруживается ли неправильное распознавание в группе параметров, которая включает в себя первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения, с помощью значения, сформированного умножением первого различия, которое является различием между первым параметром движения и вторым параметром движения, на первый весовой коэффициент, значения, сформированного умножением второго различия, которое является различием между первым параметром движения и третьим параметром движения, на второй весовой коэффициент, значения, сформированного умножением третьего различия, которое является различием между вторым параметром движения и третьим параметром движения, на третий весовой коэффициент, значения, сформированного умножением четвертого различия, которое является различием между первым параметром движения и четвертым параметром движения, на четвертый весовой коэффициент, значения, сформированного умножением пятого различия, которое является различием между вторым параметром движения и четвертым параметром движения, на пятый весовой коэффициент, и значения, сформированного умножением шестого различия, которое является различием между третьим параметром движения и четвертым параметром движения, на шестой весовой коэффициент.
[0069] Определение неправильного распознавания параметров движения описывается подробно ниже с помощью примера, в котором множество изгибов дороги для движения вычисляется в качестве параметров движения одинакового типа.
[0070] Пусть c1 будет изгибом на основе данных распознавания разметки полосы движения, указанных посредством захваченной информации с камеры, пусть c2 будет изгибом на основе данных траектории движения движущегося впереди транспортного средства, указанного посредством информации изображения с камеры и информации обнаружения от радара, пусть c3 будет изгибом на основе картографических данных от навигационной системы 6, и пусть k1, k2 и k3 будут весовыми коэффициентами. В этом случае, то, является ли изгиб корректным, т.е., неправильное распознавание изгиба, определяется посредством определения того, удовлетворяется ли выражение (1), предоставленное ниже.
[0071] Th>k1⋅|c1–c2|+k2⋅|c2–c3|+k3⋅|c3–c1| (1)
[0072] Т.е., различие между изгибом c1 и изгибом c2 умножается на весовой коэффициент k1, различие между изгибом c2 и изгибом c3 умножается на весовой коэффициент k2, и различие между изгибом c3 и изгибом c1 умножается на весовой коэффициент k3, и затем результирующие значения складываются, чтобы вычислять оценочное значение. То, являются ли изгибы c1, c2 и c3 корректными, определяется посредством определения того, меньше ли это оценочное значение, чем пороговое значение Th.
[0073] Если оценочное значение, вычисленное на основе параметров движения и весовых коэффициентов, меньше порогового значения Th, и, следовательно, выражение (1) удовлетворяется, определяется, что изгибы c1, c2 и c3 являются корректными значениями. С другой стороны, если оценочное значение не меньше порогового значения Th, и, следовательно, выражение (1) не удовлетворяется, определяется, что группа параметров, состоящая из изгибов c1, c2 и c3, является некорректной, и что неправильное распознавание обнаруживается. Пороговое значение Th может быть значением, которое задается заранее в ECU 10. Хотя абсолютное значение различия между изгибами используется в выражении (1), может быть использовано значение, сформированное взятием корня квадрата различия между различными изгибами, например, ((c1–c2)2)1/2. Весовые коэффициенты k1, k2 и k3 и пороговое значение Th, хотя и являются положительными значениями в выражении (1), могут быть отрицательными значениями. Т.е., чем выше ортогональность между входными данными, тем больше весовой коэффициент в отрицательном направлении. В этом случае, являются ли изгибы c1, c2 и c3, корректными, определяется посредством определения того, больше ли оценочное значение порогового значения Th с перевернутым направлением неравенства в выражении (1).
[0074] Весовой коэффициент задается согласно ортогональности между входными данными, соответствующими ситуации движения транспортного средства, как описано выше. Например, чем выше ортогональность между входными данными, соответствующими ситуации движения транспортного средства, тем большим задается весовой коэффициент, на который различие между параметрами движения на основе входных данных умножается.
[0075] Например, в выражении (1), когда ортогональность между данными распознавания разметки полосы движения и данными траектории движения движущегося впереди транспортного средства в ситуации движения низкая (данные распознавания разметки полосы движения и данные траектории движения движущегося впереди транспортного средства беспрепятственно неправильно распознаются в одно и то же время), ортогональность между данными распознавания разметки полосы движения и картографическими данными высокая (данные распознавания разметки полосы движения и картографические данные трудно неправильно распознать в одно и то же время), и ортогональность между данными траектории движения движущегося впереди транспортного средства и картографическими данными высокая (данные траектории движения движущегося впереди транспортного средства и картографические данные трудно неправильно распознать в одно и то же время), весовые коэффициенты k2 и k3 задаются больше весового коэффициента k1. В этом случае, когда происходит неправильное распознавание как в данных распознавания разметки полосы движения, так и в данных траектории движения движущегося впереди транспортного средства, в одно и то же время, значение |c1–c2| становится небольшим, и, следовательно, становится трудно определять в выражении (1), что происходит неправильное распознавание. Однако, поскольку значения |c2–c3| и |c3–c1| становятся большими, и, к тому же, k2 и k3, на которые эти значения умножаются, являются большими, значения k2⋅|c2–c3| и k3⋅|c3–c1| становятся большими, и, следовательно, определяется в выражении (1), что происходит неправильное распознавание. Следовательно, даже когда множество частей входных данных неправильно распознается в одно и то же время, неправильное распознавание группы параметров движения может быть определено точно.
[0076] В определении неправильного распознавания параметров движения выражение, отличное от выражения (1), может быть использовано, пока выражение может определять неправильное распознавание параметров движения с помощью значений, каждое из которых сформировано умножением различия между параметрами движения на весовой коэффициент. Выражение (1), приведенное выше, хотя и применяется к трем параметрам движения, может быть применено также к четырем или более параметрам движения. Например, когда существуют первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения, может быть определено, что происходит неправильное распознавание в группе параметров, которая включает в себя, по меньшей мере, первый параметр движения, второй параметр движения, третий параметр движения и четвертый параметр движения, если сумма следующих значений не меньше предварительно заданного порогового значения: т.е., значение, сформированное умножением первого различия, которое является различием между первым параметром движения и вторым параметром движения, на первый весовой коэффициент, значение, сформированное умножением второго различия, которое является различием между первым параметром движения и третьим параметром движения, на второй весовой коэффициент, значение, сформированное умножением третьего различия, которое является различием между вторым параметром движения и третьим параметром движения, на третий весовой коэффициент, значение, сформированное умножением четвертого различия, которое является различием между первым параметром движения и четвертым параметром движения, на четвертый весовой коэффициент, значение, сформированное умножением пятого различия, которое является различием между вторым параметром движения и четвертым параметром движения, на пятый весовой коэффициент, и значение, сформированное умножением шестого различия, которое является различием между третьим параметром движения и четвертым параметром движения, на шестой весовой коэффициент.
[0077] Блок 11 распознавания внешней обстановки, блок 12 распознавания позиции транспортного средства, блок 13 распознавания состояния движения, блок 14 формирования плана движения, блок 15 управления движением, блок 16 вычисления параметров движения, блок 17 вычисления различия, блок 18 задания весовых коэффициентов и блок 19 определения, описанные выше, могут быть сконфигурированы посредством установки программного обеспечения или программ, которые реализуют их функции, в ECU 10. Часть или все из них могут быть сконфигурированы посредством отдельных электронных блоков управления.
[0078] Далее, описывается работа устройства 1 определения неправильного распознавания в этом варианте осуществления.
[0079] Фиг. 6 – это блок-схема последовательности операций, показывающая обработку определения неправильного распознавания, выполняемую посредством устройства 1 определения неправильного распознавания в этом варианте осуществления. Обработка определения неправильного распознавания, обычно выполняемая, когда выполняется автономное управление вождением, начинается в то же самое время, когда начинается автономное управление вождением. Эта обработка определения неправильного распознавания выполняется обычно посредством ECU 10 многократно с предварительно определенным периодическим интервалом.
[0080] Сначала, как показано на этапе S10 (далее в данном документе этап просто описывается в форме "S10", и это обозначение используется для других этапов S) на фиг. 6, выполняется обработка считывания информации датчика. Эта обработка считывает информацию с внешнего датчика 2, блока 3 приема GPS, внутреннего датчика 4 и навигационной системы 6. Например, в качестве информации от внешнего датчика 2, захваченная информация или информация изображения с камеры и информация обнаружения с радара считываются. В качестве информации датчика с внутреннего датчика считываются информация о скорости транспортного средства, информация об угле поворота рулевого колеса и информация о моменте рулевого управления по транспортному средству, которое является рассматриваемым транспортным средством. В качестве информации от навигационной системы 6 считываются информация позиции транспортного средства и информация о полосе движения по дороге для движения, по которой транспортное средство движется.
[0081] После этого обработка переходит к этапу S12, чтобы выполнять обработку вычисления параметров движения. Эта обработка вычисления вычисляет параметры движения, используемые для автономного управления вождением, на основе входных данных. В качестве параметров движения вычисляются изгиб и скорость изменения изгиба дороги для движения и угол поворота вокруг вертикальной оси и смещение транспортного средства.
[0082] Чтобы вычислять изгиб, разметка полосы движения распознается из информации изображения, захваченной посредством камеры, и, на основе данных распознавания разметки полосы движения, вычисляется изгиб. Кроме того, траектория движения движущегося впереди транспортного средства распознается из информации изображения, захваченной посредством камеры, и из информации обнаружения, обнаруженной посредством радара, и, на основе распознанных данных траектории движения движущегося впереди транспортного средства, вычисляется изгиб. Кроме того, текущая позиция движения транспортного средства распознается из картографической информации и из информации позиции транспортного средства, и, на основе дорожных данных по этой позиции движения, вычисляется изгиб. Таким образом, множество изгибов вычисляется в качестве параметра движения одинакового типа на основе различных входных данных, принятых из различных источников получения информации.
[0083] Чтобы вычислять скорость изменения изгиба, разметка полосы движения распознается из информации изображения, захваченной посредством камеры, и, на основе данных распознавания разметки полосы движения, вычисляется скорость изменения изгиба. Кроме того, траектория движения движущегося впереди транспортного средства распознается из информации изображения, захваченной посредством камеры, и из информации обнаружения, обнаруженной посредством радара, и, на основе распознанных данных траектории движения движущегося впереди транспортного средства, вычисляется скорость изменения изгиба. Кроме того, текущая позиция движения транспортного средства распознается на основе картографической информации и информации позиции транспортного средства, и, на основе дорожных данных по этой позиции движения, вычисляется скорость изменения изгиба. Таким образом, множество скоростей изменения изгиба вычисляется в качестве параметра движения одинакового типа на основе различных входных данных, принятых из различных источников получения информации.
[0084] Чтобы вычислять угол поворота вокруг вертикальной оси, разметка полосы движения распознается из информации изображения, захваченной посредством камеры, и, на основе данных распознавания разметки полосы движения, вычисляется угол поворота вокруг вертикальной оси. Угол поворота вокруг вертикальной оси вычисляется также на основе информации обнаружения, обнаруженной посредством датчика скорости поворота вокруг вертикальной оси. Кроме того, угол поворота вокруг вертикальной оси вычисляется на основе информации обнаружения, обнаруженной посредством датчика угла поворота рулевого колеса или датчика момента рулевого управления. Кроме того, угол поворота вокруг вертикальной оси может быть вычислен из траектории движения транспортного средства на основе картографической информации и информации позиции транспортного средства. Таким образом, множество углов поворота вокруг вертикальной оси вычисляется в качестве параметра движения одинакового типа на основе различных входных данных, принятых из различных источников получения информации.
[0085] Чтобы вычислять смещение, разметка полосы движения распознается из информации изображения, захваченной посредством камеры, и, на основе данных распознавания разметки полосы движения, вычисляется смещение. Кроме того, траектория движения транспортного средства распознается на основе картографической информации и информации позиции транспортного средства, и, на основе данных траектории движения, вычисляется смещение. Таким образом, множество смещений вычисляется в качестве параметра движения одинакового типа на основе различных входных данных, принятых из различных источников получения информации.
[0086] После этого обработка переходит к этапу S14, чтобы выполнять обработку вычисления различия. Обработка вычисления различия вычисляет различие между параметрами движения одинакового типа, полученными из различных входных данных. Например, когда параметр движения является изгибом дороги для движения, и когда три параметра движения, т.е., первый параметр движения, т.е., изгиб на основе данных распознавания разметки полосы движения, второй параметр движения, т.е., изгиб на основе данных траектории движения движущегося впереди транспортного средства, и третий параметр движения, т.е., изгиб на основе картографических данных, вычисляются, первое различие, т.е., различие между первым параметром движения и вторым параметром движения, второе различие, т.е., различие между первым параметром движения и третьим параметром движения, и третье различие, т.е., различие между вторым параметром движения и третьим параметром движения, вычисляются.
[0087] После этого обработка переходит к этапу S16, чтобы выполнять обработку распознавания ситуации движения. Обработка распознавания ситуации движения распознает ситуацию движения транспортного средства. Например, обработка распознавания ситуации движения распознает, что текущая ситуация движения транспортного средства является, на основе картографической информации, информацией позиции транспортного средства и информацией обнаружения, обнаруженной посредством внешнего датчика 2, и определяет, является ли текущая ситуация движения предварительно заданной конкретной ситуацией движения. Если ситуация не является конкретной ситуацией движения, ситуация распознается как обычная ситуация движения. Предварительно заданная конкретная ситуация движения является ситуацией движения, в которой множество частей входных данных для вычисления множества параметров движения беспрепятственно неправильно распознается в одно и то же время. Обычная ситуация движения – это ситуация движения, в которой множество частей входных данных беспрепятственно неправильно не распознается в одно и то же время. Например, когда параметр движения является изгибом полосы движения, предварительно заданные конкретные ситуации движения включают в себя ситуацию движения рядом с ответвлением дороги для движения (см. фиг. 2), ситуацию движения рядом с выездом из туннеля (см. фиг. 3), ситуацию движения в городской области (фиг. 4) и ситуацию движения, в которой движущееся впереди транспортное средство движется в сторону автомобиля большого размера (см. фиг. 5).
[0088] После этого обработка переходит к этапу S18, чтобы выполнять обработку задания весовых коэффициентов. Обработка задания весовых коэффициентов задает весовой коэффициент согласно ортогональности между одной частью входных данных и другой частью входных данных в обстановке движения транспортного средства. Например, когда существуют три части входных данных, т.е., первые входные данные, вторые входные данные и третьи входные данные, следующие три весовых коэффициента задаются: первый весовой коэффициент согласно ортогональности между первыми входными данными и вторыми входными данными в ситуации движения транспортного средства, второй весовой коэффициент согласно ортогональности между первыми входными данными и третьими входными данными в ситуации движения и третий весовой коэффициент согласно ортогональности между вторыми входными данными и третьими входными данными в обстановке движения. Первый весовой коэффициент является весовым коэффициентом, на который различие между первым параметром движения на основе первых входных данных и вторым параметром движения на основе вторых входных данных умножается. Второй весовой коэффициент является весовым коэффициентом, на который различие между первым параметром движения на основе первых входных данных и третьим параметром движения на основе третьих входных данных умножается. Третий весовой коэффициент является весовым коэффициентом, на который различие между вторым параметром движения на основе вторых входных данных и третьим параметром движения на основе третьих входных данных умножается.
[0089] В обработке задания весовых коэффициентов, чем выше ортогональность между входными данными в ситуации движения транспортного средства, тем большим задается весовой коэффициент. Например, когда существуют три части входных данных, т.е., первые входные данные, вторые входные данные и третьи входные данные, и когда ортогональность между первыми входными данными и вторыми входными данными в ситуации движения транспортного средства выше ортогональности между первыми входными данными и третьими входными данными, первый весовой коэффициент задается больше второго весового коэффициента. Когда ситуация движения транспортного средства является обычной ситуацией движения (ситуацией движения, в которой множество частей входных данных или параметров движения неправильно не распознаются в одно и то же время), ортогональность между входными данными является почти одинаковой, и, следовательно, одинаковое значение может быть использовано для весовых коэффициентов.
[0090] После этого обработка переходит к этапу S20, чтобы определять, происходит ли неправильное распознавание в параметрах движения. Эта обработка определения определяет, происходит ли неправильное распознавание во множестве параметров движения одинакового типа, таких как изгиб, т.е., происходит ли неправильное распознавание в группе параметров. Например, когда определение выполняется для первого параметра движения, второго параметра движения и третьего параметра движения, которые являются параметрами движения одинакового типа, обработка определения определяет, происходит ли неправильное распознавание в группе параметров, с помощью значения, сформированного умножением первого различия, которое является различием между первым параметром движения и вторым параметром движения, на первый весовой коэффициент, значения, сформированного умножением второго различия, которое является различием между первым параметром движения и третьим параметром движения, на второй весовой коэффициент, и значения, сформированного умножением третьего различия, которое является различием между вторым параметром движения и третьим параметром движения, на третий весовой коэффициент. Весовые коэффициенты являются коэффициентами, которые задаются согласно ситуации движения транспортного средства.
[0091] Более конкретно, используя выражение (1), приведенное выше, сумма значения, сформированного умножением первого различия на первый весовой коэффициент, значения, сформированного умножением второго различия на второй весовой коэффициент, и значения, сформированного умножением третьего различия на третий весовой коэффициент, вычисляется, и, затем, выполняется определение того, происходит ли неправильное распознавание в группе параметров, посредством определения того, меньше ли значение суммы предварительно заданного порогового значения. Т.е., если сумма значений, каждое из которых сформировано умножением различия между параметрами движения на весовой коэффициент, меньше порогового значения, определяется, что неправильное распознавание не происходит в группе параметров. С другой стороны, если сумма значений, каждое из которых сформировано умножением различия между параметрами движения на весовой коэффициент, не меньше порогового значения, определяется, что происходит неправильное распознавание в группе параметров.
[0092] Хотя определение выполняется в выражении (1) о том, меньше ли сумма порогового значения, определение может также быть выполнено о том, равна или меньше сумма порогового значения. Определение неправильного распознавания может также быть выполнено с помощью выражения определения, отличного от выражения (1). Кроме того, когда существуют четыре или более параметров движения одинакового типа, число значений, каждое из которых сформировано умножением различия на весовой коэффициент, может быть увеличено согласно числу параметров движения, при этом пороговое значение задается согласно числу параметров движения. Выражение (1) является выражением, чтобы выполнять определение неправильного распознавания для изгиба; для других параметров движения выражение аналогичного формата может быть использовано, чтобы выполнять определение неправильного распознавания.
[0093] Если определяется на этапе S20, что неправильное распознавание не происходит в группе параметров для параметров движения, обработка продолжения управления выполняется (S22). Эта обработка продолжения управления вынуждает обработку управления транспортным средством продолжаться. Например, обработка для включения флага продолжения управления выполняется. Эта обработка предоставляет возможность продолжать выполняемое в настоящий момент управление транспортным средством, такое как автономное управление вождением.
[0094] С другой стороны, если определяется на этапе S20, что происходит неправильное распознавание в группе параметров для параметров движения, обработка прекращения управления выполняется (S24). Эта обработка прекращения управления вынуждает обработку управления транспортным средством завершаться. Например, обработка для включения флага прекращения управления выполняется. Эта обработка вынуждает выполняемое в настоящий момент управление транспортным средством, такое как автономное управление вождением, прекращаться. Управление транспортным средством может быть прекращено после продолжения управления с помощью предыдущих значений параметров движения. Кроме того, информация, указывающая, что неправильное распознавание может возможно происходить в управлении, может быть сообщена пассажирам транспортного средства. В дополнение к этой информации, информация может быть отправлена, чтобы сообщать водителю об удержании рулевого колеса, или предполагаемая траектория транспортного средства может быть отображена. Также представляется возможным прогнозировать время до момента, когда величина управления достигнет максимума, чтобы изменять вывод HMI 7 согласно спрогнозированному времени и издавать сигнал тревоги или предупреждение. После обработки на этапе S22 или S24 последовательность обработки управления завершается.
[0095] В последовательности обработки управления движением, показанной на фиг. 6, часть выполнения обработки управления может быть опущена, порядок обработки управления может быть изменен, или другая обработка выполнения может быть добавлена, пока на результат управления не оказывается влияние.
[0096] Согласно обработке определения неправильного распознавания, показанной на фиг. 6, весовые коэффициенты задаются согласно ортогональности между различными входными данными в ситуации движения (обстановке движения) транспортного средства, и, с помощью значений, каждое из которых сформировано умножением различия между параметрами движения на основе входных данных на весовой коэффициент, выполняется определение о том, происходит ли неправильное распознавание во множестве параметров движения, как описано выше. Следовательно, учитывая, что параметры движения, которые различаются между ситуациями движения транспортного средства, трудно неправильно распознавать в одно и то же время, определение неправильного распознавания параметров движения может быть выполнено точно.
[0097] Кроме того, чем выше ортогональность между входными данными в ситуации движения транспортного средства, тем большим задается весовой коэффициент, и, с помощью весовых коэффициентов, которые заданы таким образом, неправильное распознавание параметров движения определяется. Следовательно, неправильное распознавание параметров движения может быть определено более точно для каждой ситуации движения транспортного средства.
[0098] Фиг. 7 – это блок-схема последовательности операций, показывающая обработку корректировки весового коэффициента, выполняемую посредством устройства 1 определения неправильного распознавания в этом варианте осуществления. Обработка корректировки весового коэффициента является обработкой для обновления или изучения весовых коэффициентов, используемых для определения неправильного распознавания параметров движения. Эта обработка корректировки весового коэффициента выполняется, в то время как автономное управление вождением выполняется, или после того как автономное управление вождением завершено. Эта обработка корректировки весового коэффициента, обычно выполняемая посредством ECU 10, может выполняться многократно во время автономного управления вождением с предварительно определенным периодическим интервалом или может выполняться на основе данных, используемых во время управления, когда автономное управление вождением завершено.
[0099] Сначала, как показано на этапе S30 на фиг. 7, выполняется определение о том, выполняется ли действие переключения на ручное вождение во время управления вождением транспортного средства. Эта обработка определения определяет, выполняет ли пассажир транспортного средства действие переключения на ручное вождение во время управления вождением транспортного средства. Например, выполняется определение о том, прекращено ли автономное управление вождением, и управление переключается на ручное вождение посредством действия ручного вождения, такого как управление рулевым колесом водителем во время управления вождением транспортного средства. Действие переключения на ручное вождение может быть действием ручного вождения, таким как воздействие на рулевое колесо, или воздействие на кнопку переключения на ручное вождение.
[0100] Если определяется на этапе S30, что действие переключения на ручное вождение не выполняется во время управления вождением транспортного средства, обработка управления завершается. В этом случае, весовые коэффициенты не корректируются или сбрасываются. С другой стороны, если определяется на этапе S30, что выполняется действие переключения на ручное вождение во время управления вождением транспортного средства, обработка корректировки весового коэффициента выполняется (S32). Эта обработка корректировки обновляет и изучает весовые коэффициенты, так что управление транспортным средством с помощью параметров движения выполняется более соответствующим образом. Весовые коэффициенты сбрасываются, так что неправильное распознавание группы параметров для параметров движения определяется более простым образом, чем когда действие переключения на ручное вождение не выполняется. Например, когда первый параметр движения, второй параметр движения и третий параметр движения используются в управлении вождением, первый весовой коэффициент, второй весовой коэффициент и третий весовой коэффициент используются в качестве весовых коэффициентов, каждый из которых является весовым коэффициентом, на который различие между параметрами движения умножается. В этом случае, по меньшей мере, один из первого весового коэффициента, второго весового коэффициента и третьего весового коэффициента корректируется.
[0101] Более конкретно, корректировка выполняется таким образом, что весовой коэффициент, на который умножается различие между двумя параметрами движения, которые являются любыми двумя из первого параметра движения, второго параметра движения и третьего параметра движения, и которые имеют аналогичное значение, уменьшается, и что другие весовые коэффициенты увеличиваются. Вместо этого, корректировка может быть выполнена таким образом, что весовые коэффициенты, на которые умножается различие, соответствующее параметру движения, имеющему самое отличающееся значение, увеличиваются. Выполняя корректировку, как описано выше, значения, каждое из которых сформировано умножением различия между параметрами движения на весовой коэффициент, могут быть увеличены, и, при определении неправильного распознавания параметров движения на основе величины этих значений, определение неправильного распознавания может быть выполнено более точно. После обработки на этапе S32 последовательность обработки управления завершается.
[0102] Согласно обработке корректировки весового коэффициента на фиг. 7, когда определяется, что выполняется действие переключения на ручное вождение во время управления вождением транспортного средства, весовые коэффициенты корректируются, как описано выше, так что неправильное распознавание параметров движения легко определяется. Эта корректировка предоставляет возможность определять неправильное распознавание параметров движения более точно, увеличивая точность в определении неправильного распознавания параметров движения.
[0103] Фиг. 8 – это блок-схема последовательности операций, показывающая обработку управления рулением, выполняемую в транспортном средстве, на котором устройство 1 определения неправильного распознавания в этом варианте осуществления установлено. Обработка управления рулением, обработка для управления рулевым устройством транспортного средства, выполняется как часть автономного управления вождением транспортного средства. Эта обработка управления рулением начинается, например, в то же время, когда начинается автономное управление вождением. Эта обработка управления рулением выполняется обычно посредством ECU 10 многократно с предварительно определенным периодическим интервалом.
[0104] Сначала, как показано на этапе S40 на фиг. 8, выполняется обработка считывания информации. Эта обработка считывает информацию с внешнего датчика 2, блока 3 приема GPS, внутреннего датчика 4 и навигационной системы 6. Например, в качестве информации от внешнего датчика 2, захваченная информация или информация изображения с камеры и информация обнаружения с радара считываются. В качестве информации датчика с внутреннего датчика считываются информация о скорости транспортного средства, информация об угле поворота рулевого колеса и информация о моменте рулевого управления по транспортному средству, которое является рассматриваемым транспортным средством. В качестве информации от навигационной системы 6 считываются информация позиции транспортного средства и информация о полосе движения по дороге для движения, по которой транспортное средство движется.
[0105] Далее, обработка переходит к этапу S42, чтобы выполнять обработку вычисления параметров движения. Эта обработка вычисления вычисляет параметры движения, используемые для автономного управления вождением. Например, параметры движения включают в себя изгиб и скорость изменения изгиба дороги для движения и угол поворота вокруг вертикальной оси и смещение транспортного средства. Эта обработка вычисления может быть выполнена аналогично обработке вычисления на этапе S12 на фиг. 6. Параметры движения, которые вычисляются на этом этапе и определяются как нераспознанные неправильно, используются для управления рулением. Определение неправильного распознавания параметров движения выполняется посредством обработки определения неправильного распознавания, показанной на фиг. 6.
[0106] Далее, обработка переходит к этапу S44, чтобы выполнять обработку вычисления целевого угла поворота рулевого колеса. Эта обработка вычисления вычисляет целевой угол поворота рулевого колеса транспортного средства. Например, целевой угол поворота рулевого колеса вычисляется на основе изгиба и скорости изменения изгиба дороги для движения и угла поворота вокруг вертикальной оси и смещения транспортного средства, все из которых являются параметрами движения. После этого обработка переходит к обработке на этапе S46, чтобы выполнять обработку вычисления целевого момента рулевого управления. Эта обработка вычисления вычисляет момент рулевого управления, требуемый для реализации целевого угла поворота рулевого колеса транспортного средства, в качестве целевого момента рулевого управления. Известный способ может быть использован для способа вычисления на этапе S44 и S46.
[0107] Далее, обработка переходит к обработке на этапе S48, чтобы выполнять обработку управления рулением. Обработка управления рулением, обработка для управления рулевым устройством транспортного средства, выводит вычисленную информацию о целевом моменте рулевого управления из ECU 10 к исполнительному устройству 8 в качестве управляющего сигнала. Это инструктирует выполнение действия руления транспортным средством согласно целевому моменту рулевого управления. После обработки на этапе S48 последовательность обработки управления на фиг. 8 завершается.
[0108] Обработка управления рулением, такая как показанная на фиг. 8, предоставляет возможность выполнения обработки управления рулением транспортным средством с помощью параметров движения, таких как изгиб. Эта обработка управления рулением, которая является примером обработки управления транспортного средства, может быть применена к другой обработке управления транспортным средством, если транспортное средство управляется с помощью параметров движения.
[0109] Как описано выше, устройство 1 определения неправильного распознавания в этом варианте осуществления задает весовые коэффициенты согласно ортогональности между входными данными в обстановке движения транспортного средства и, с помощью значений, каждое из которых сформировано умножением различия между параметрами движения на основе входных данных на весовой коэффициент, определяет неправильное распознавание параметров движения. Следовательно, весовые коэффициенты могут быть заданы, принимая во внимание, что входные данные, которые различаются между ситуациями движения транспортного средства, трудно неправильно распознавать в одно и то же время. Это предоставляет возможность определять неправильное распознавание параметров движения более точно.
[0110] Устройство 1 определения неправильного распознавания задает весовые коэффициенты таким образом, что чем выше ортогональность между входными данными в ситуации движения транспортного средства, тем большим задается весовой коэффициент, и определяет неправильное распознавание параметров движения с помощью весовых коэффициентов. Следовательно, это предоставляет возможность определять неправильное распознавание параметров движения в ситуации движения транспортного средства более точно. Т.е., даже если неправильное обнаружение или неправильное распознавание происходит во множестве датчиков в одно и то же время вследствие ситуации движения, некорректное распознавание может быть определено точно.
[0111] Когда выполняется действие переключения на ручное вождение во время управления вождением транспортного средства, устройство 1 определения неправильного распознавания корректирует или сбрасывает, по меньшей мере, один из первого весового коэффициента, второго весового коэффициента и третьего весового коэффициента, так что блок определения может определять более простым образом, что происходит неправильное распознавание, чем когда действие переключения на ручное вождение не выполняется. В результате, когда выполняется действие переключения на ручное вождение, и существует вероятность, что управление вождением не выполняется как предполагается водителем, блок определения может определять более простым образом, что происходит неправильное распознавание в группе параметров движения. Следовательно, определение неправильного распознавания параметров движения может быть выполнено более точно согласно обстановке движения, приводя в результате к тому, что точность в определении неправильного распознавания параметров движения увеличивается.
[0112] В то время как один вариант осуществления устройства определения неправильного распознавания настоящего изобретения был описан, должно быть понятно, что устройство определения неправильного распознавания настоящего изобретения не ограничивается устройством, описанным в варианте осуществления, описанном выше. Устройство определения неправильного распознавания настоящего изобретения может быть устройством, которое создано посредством модификации устройства определения неправильного распознавания в варианте осуществления, описанном выше, или может быть устройством, которое применяется к другим блокам, в духе, описанном в формуле изобретения.
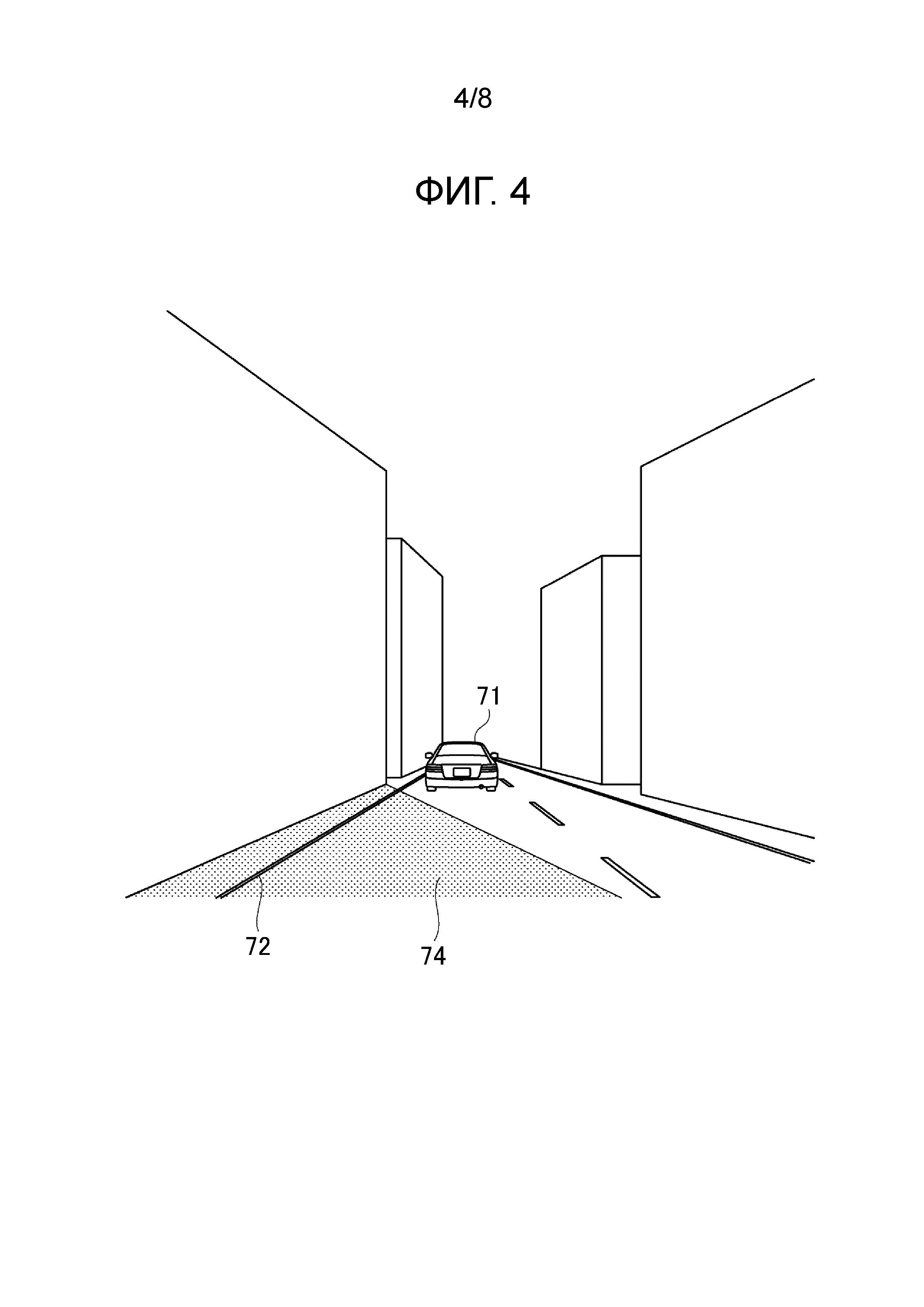
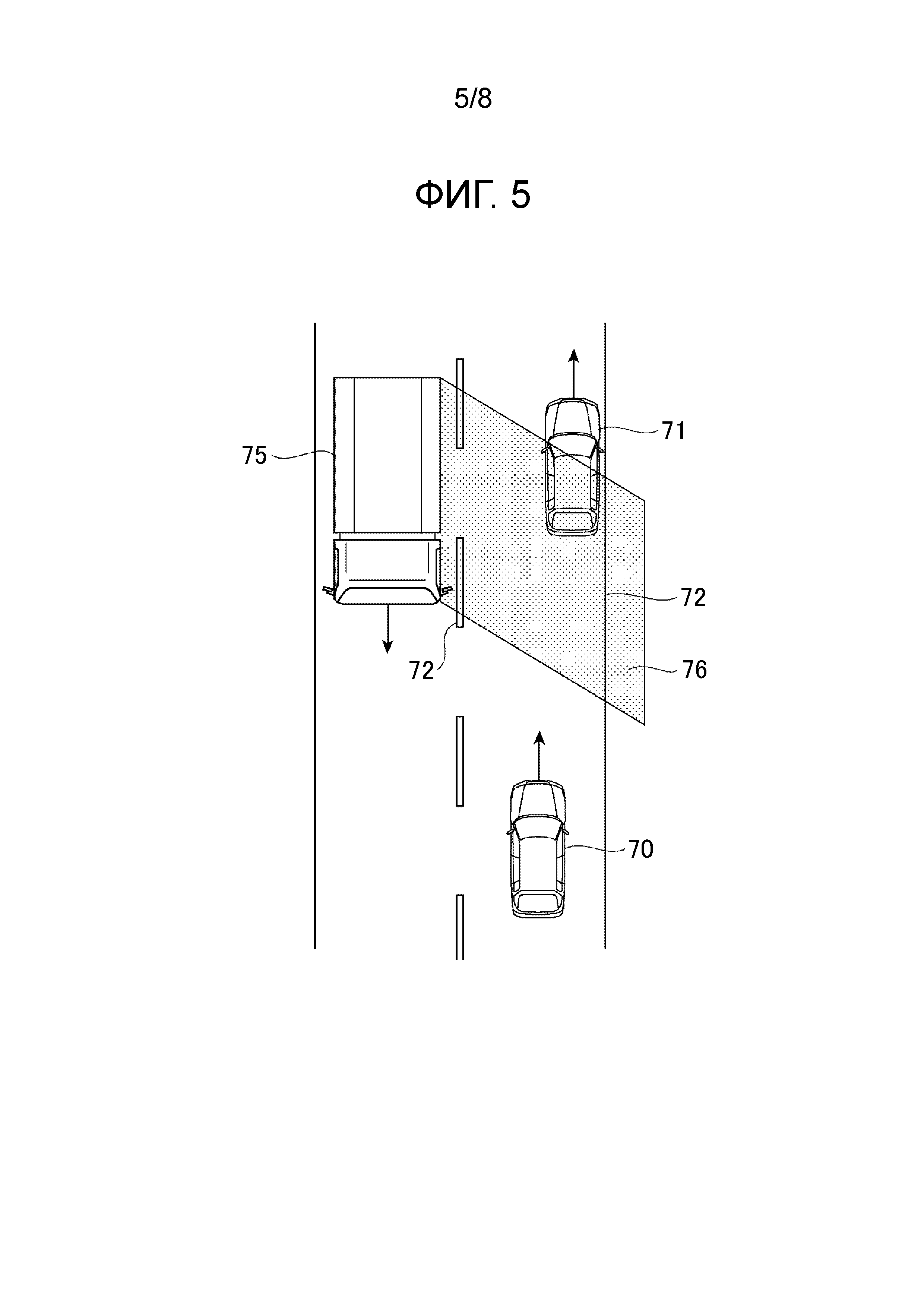
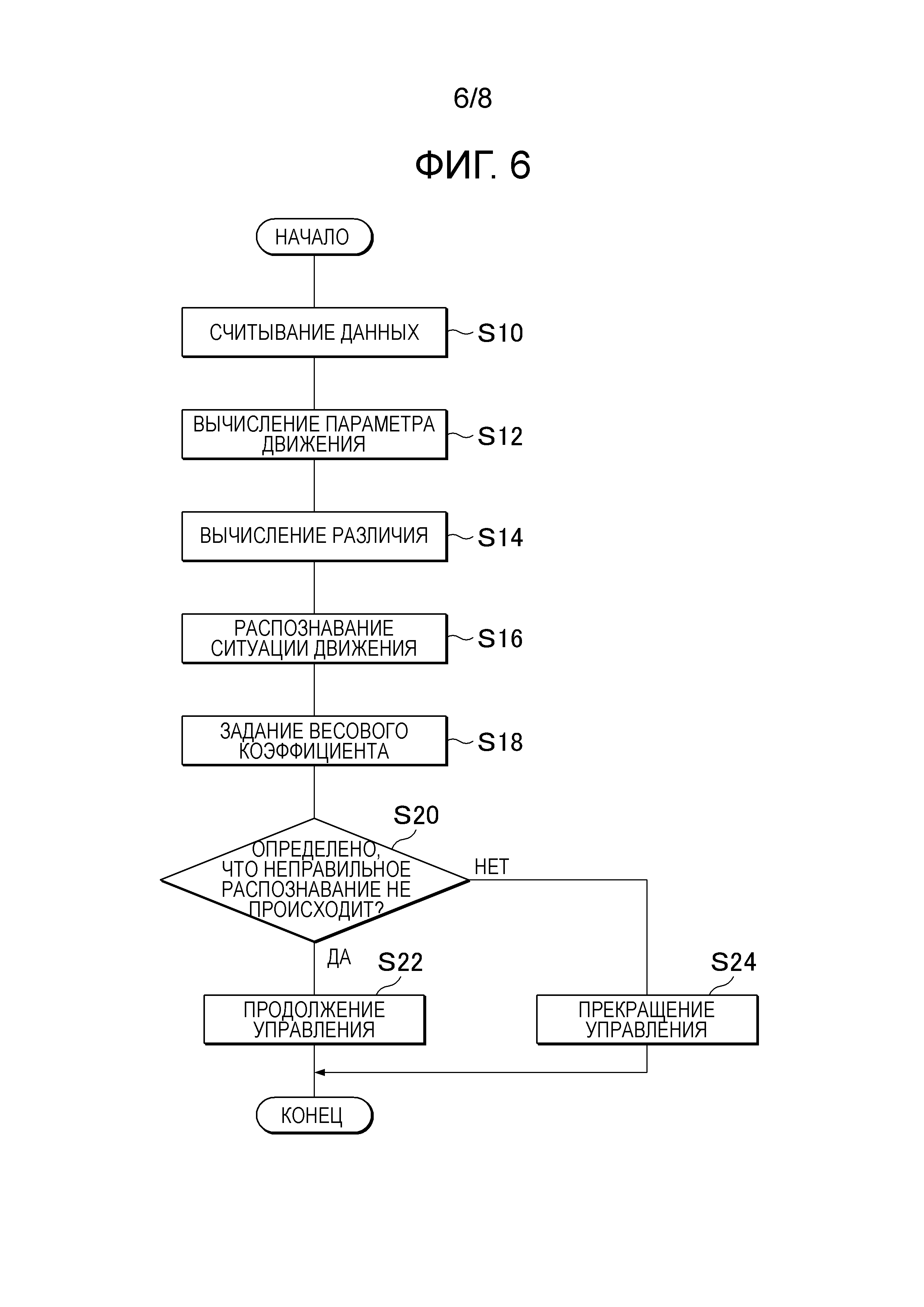
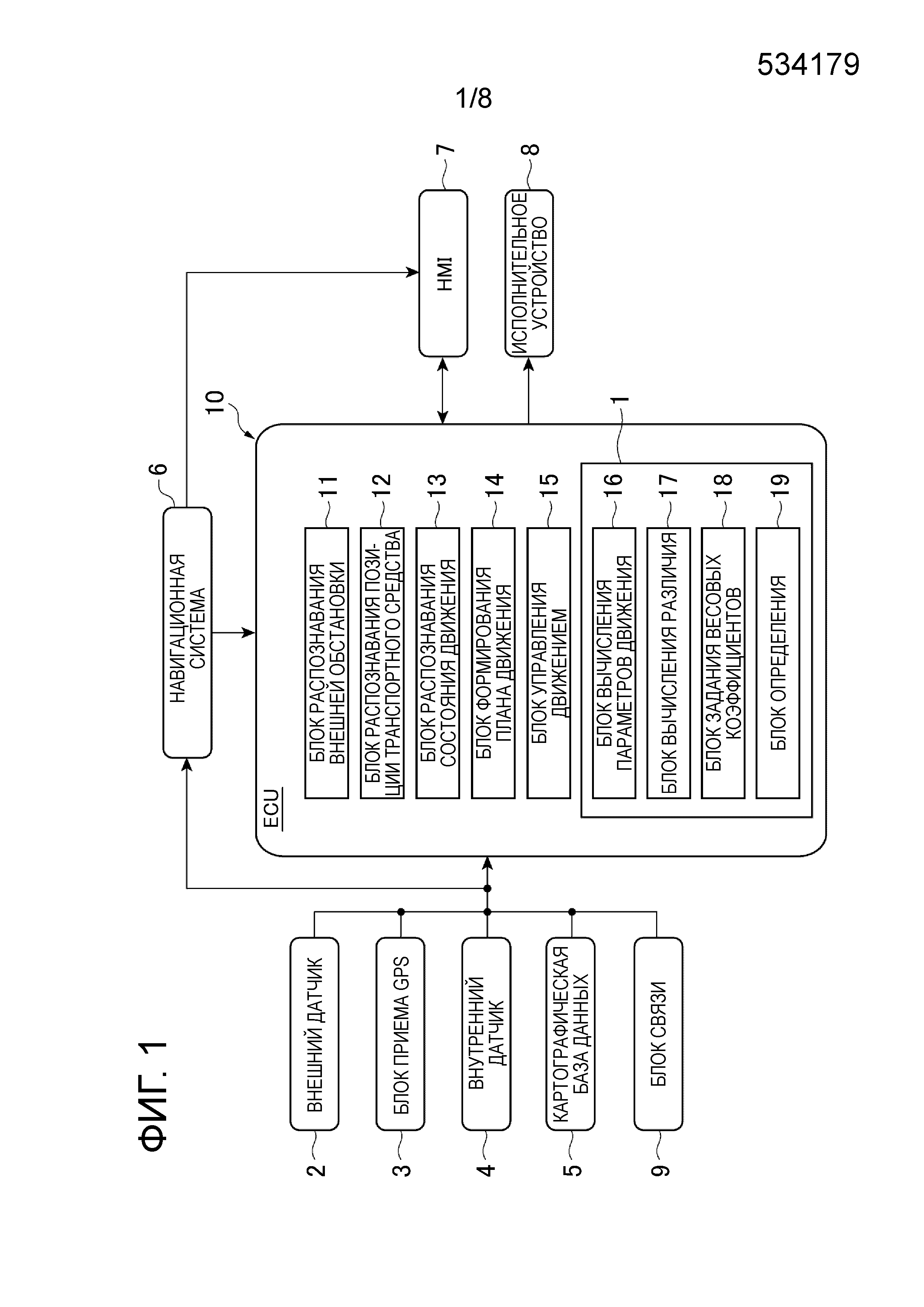
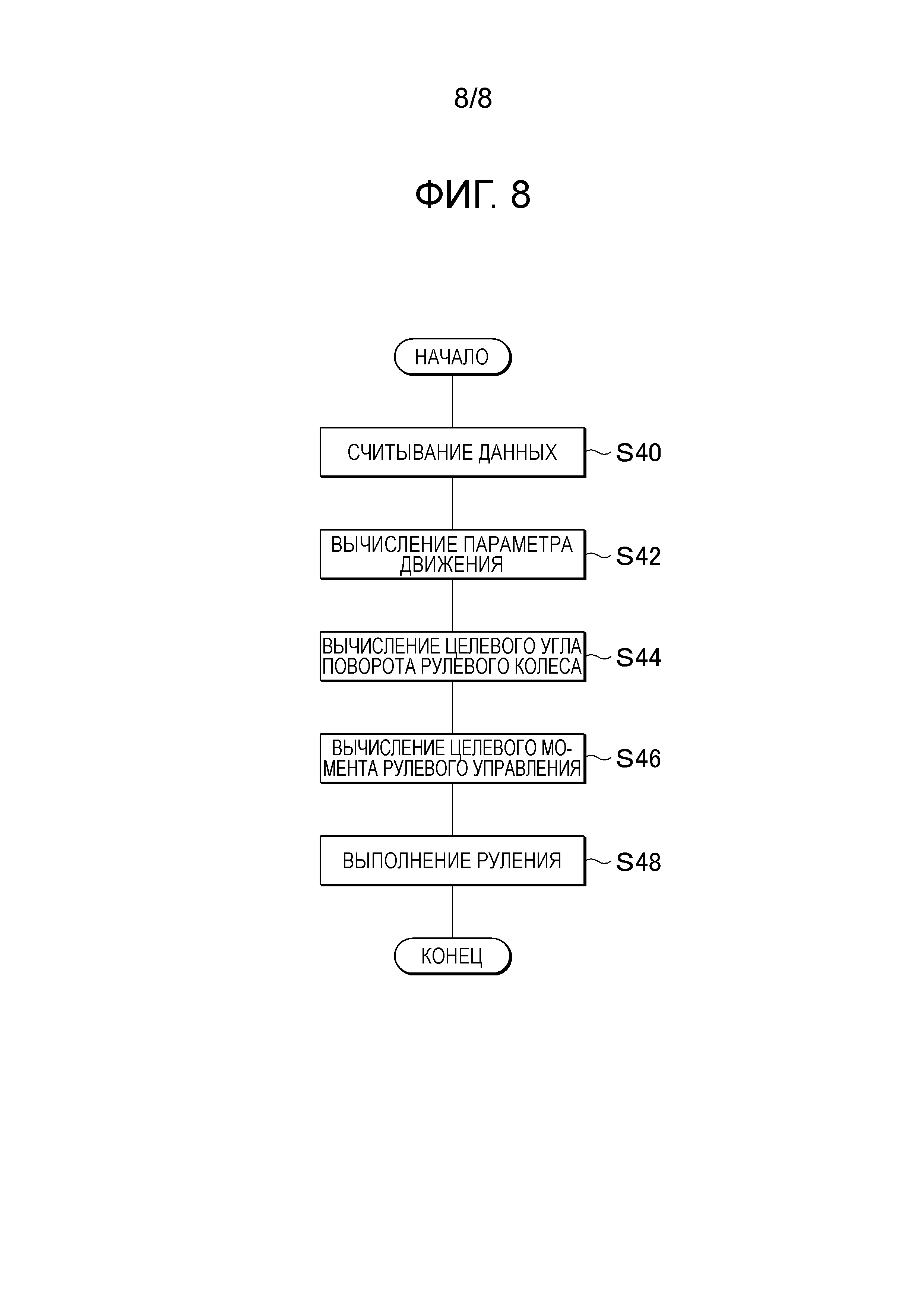
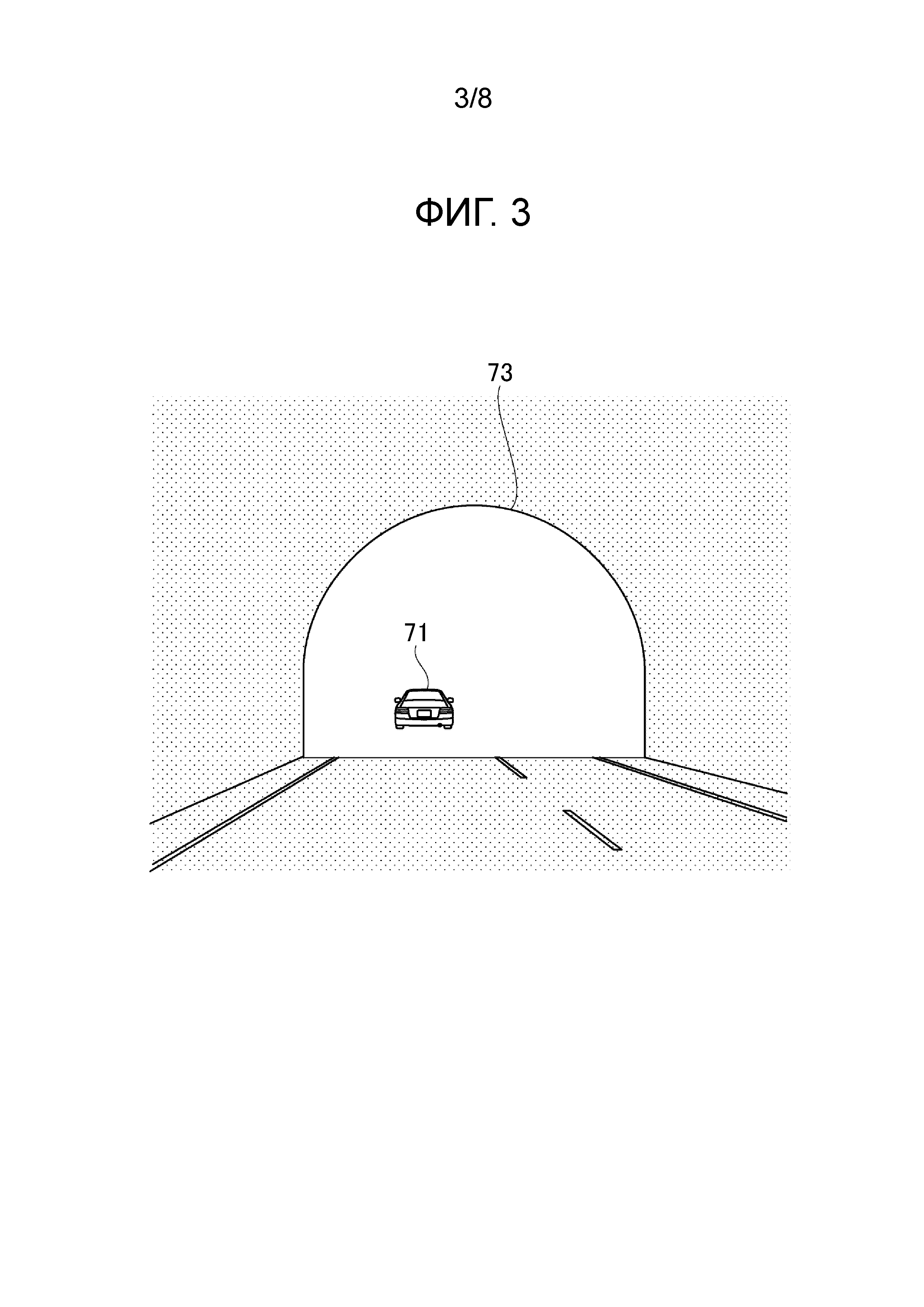
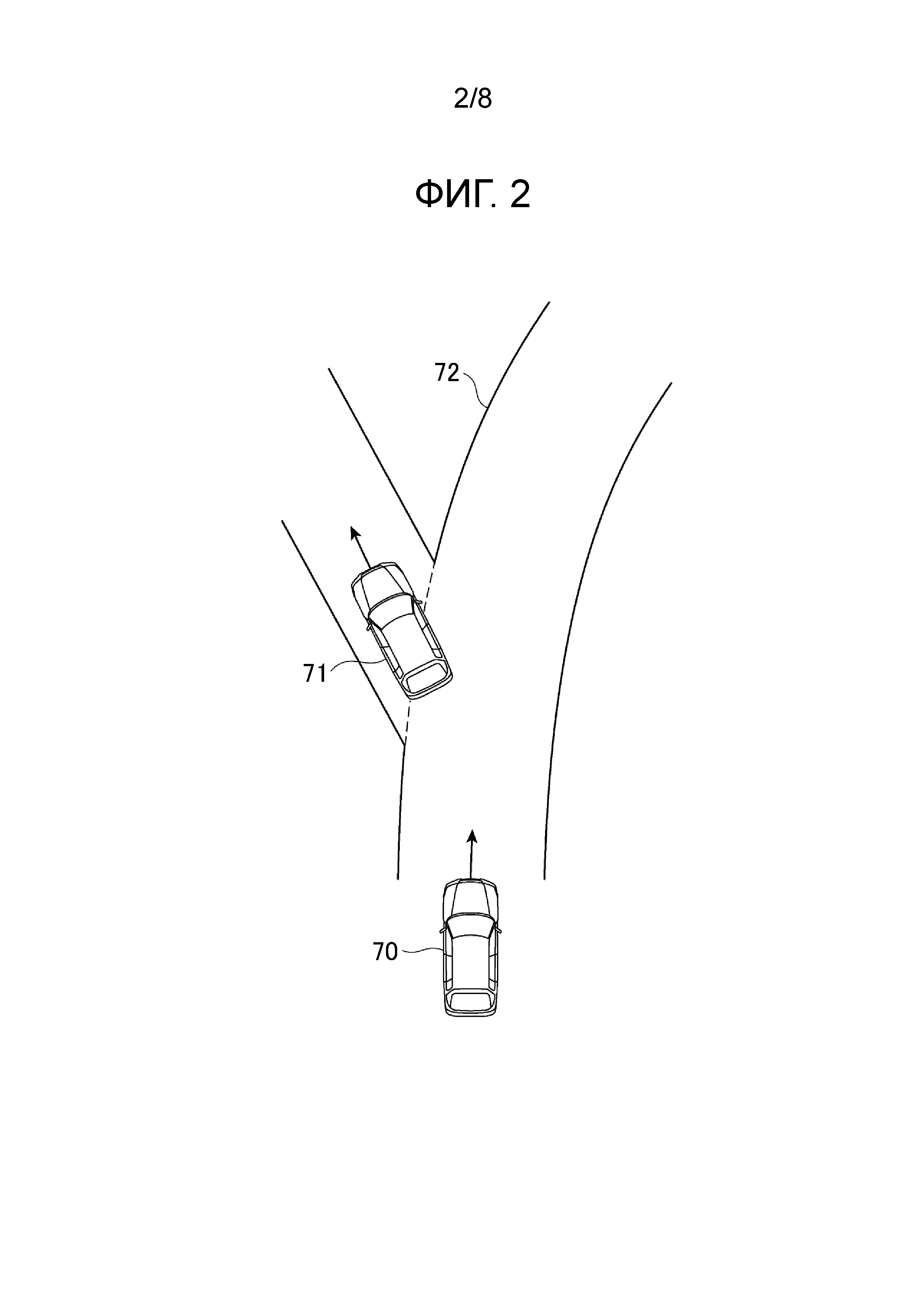
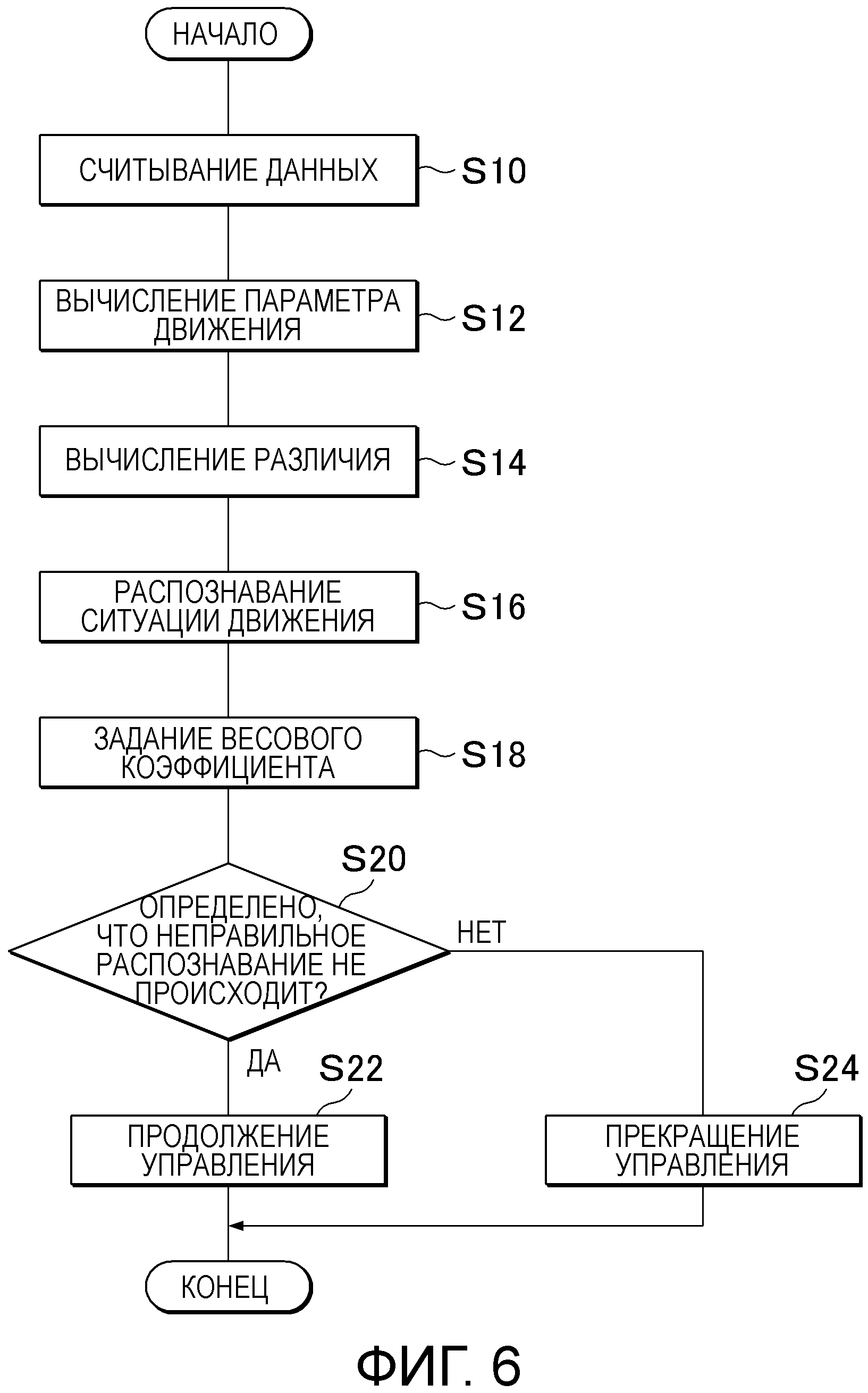
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

