Результат интеллектуальной деятельности: СПОСОБ ОХРАННОГО МОНИТОРИНГА
Вид РИД
Изобретение
Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения (СО) для сигнализационного контроля дороги.
Как правило, маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Знание силами реагирования направления движения нарушителя имеет большое значение, так как позволяет сузить направление его поиска и тем самым повысить вероятность его обнаружения и задержания [1]. Поэтому, сигнализационному прикрытию дорожной сети уделяется значительное внимание.
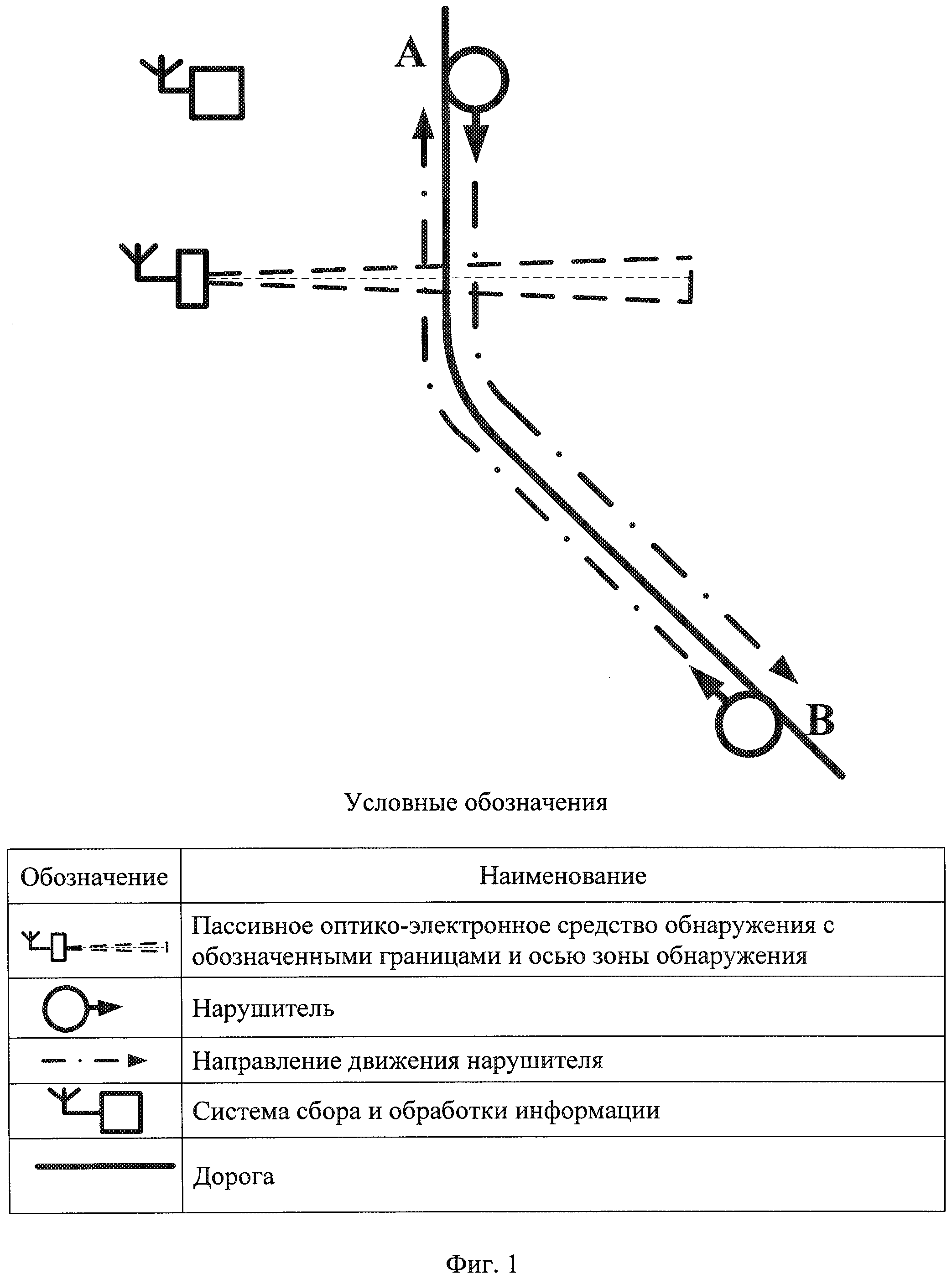
Известен способ охранного мониторинга, заключающийся в контроле дороги одним СО, в обеспечении регистрации системой сбора и обработки информации (ССОИ) сигналов тревог от СО при пересечении нарушителем его зоны обнаружения (фиг. 1).
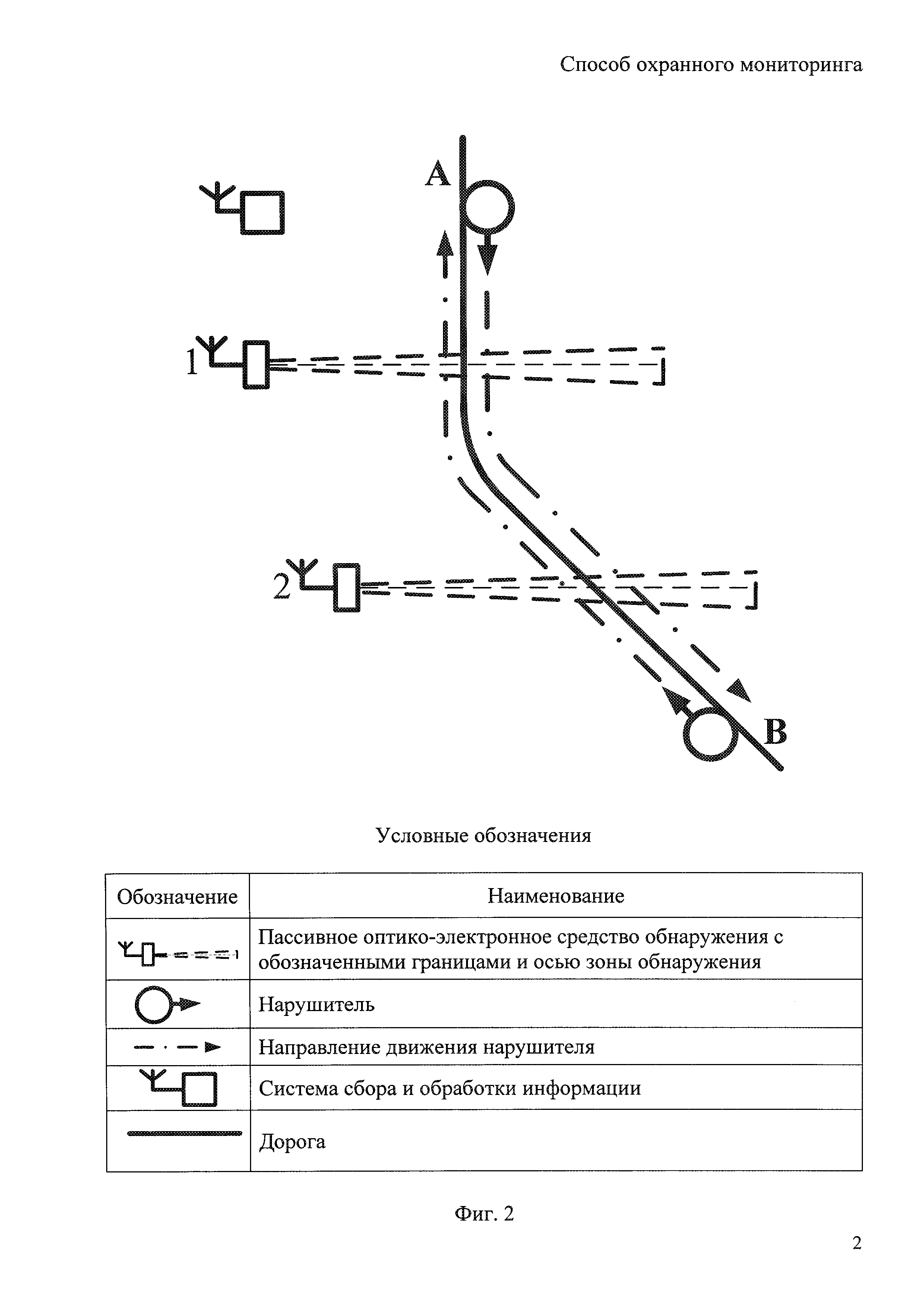
Известен другой способ охранного мониторинга, заключающийся в контроле дороги двумя СО 1 и СО 2, в обеспечении регистрации ССОИ сигналов тревог от СО 1 и СО 2, при пересечении нарушителем их зоны обнаружения (ЗО), применении алгоритма определения направления движения обнаруженного нарушителя на основе анализа очередности поступления сигналов тревог от двух СО 1 и СО 2 (фиг. 2).
Недостатком первого указанного способа охранного мониторинга является невозможность определения направления движения обнаруженного нарушителя.
Второй указанный способ охранного мониторинга имеет возможность определения направления движения нарушителя, однако, для его реализации необходимо развертывание двух СО 1 и СО 2.
Целью изобретения является получение возможности определения направление движения обнаруженного нарушителя с применением только одного СО.
Как правило, дорога, проходящая по участку местности, не является абсолютно прямой, одним из наиболее часто встречаемых элементов дорожной сети является изгиб дороги (дугообразный поворот, искривление дороги - состоящие из двух смежных прямых участков дороги, соединенных круговой кривой) [2].
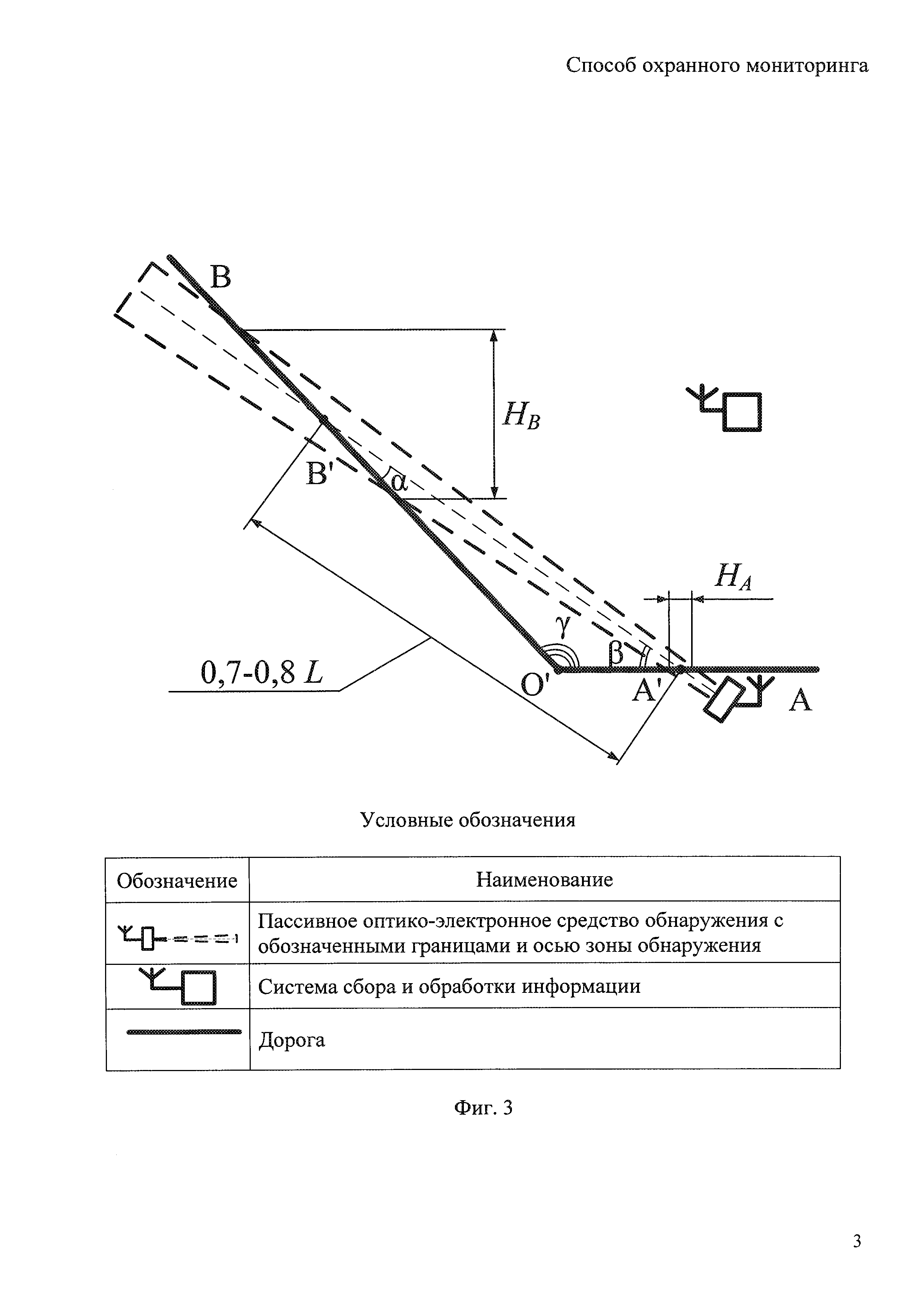
Для достижения поставленной цели разработан способ охранного мониторинга, заключающийся в контроле изгиба дороги одним СО, развернутым на изгибе дороги с учетом конусообразной формы его ЗО, таким образом, чтобы ЗО и изгиб дороги пересекались на двух участках - узком и широком; обеспечении превышения разницы между временем нахождения СО в режиме тревоги при пересечении этих двух участков нарушителем не менее чем в четыре раза, для чего согласно схемы развертывания ось ЗО пересекает дорогу на широком участке под углом от 20 до 30 градусов; расстояние между точками пресечения оси зоны обнаружения и дорогой выбирается в пределах от 70 до 80 процентов от максимальной длины зоны обнаружения; многократном переходе СО в режим тревоги во время движения нарушителя через изгиб дороги; накоплении системой сбора и обработки информации сигналов тревог в течение установленного времени накопления сигналов тревог; установлении времени накопления сигналов тревог исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения ЗО и дороги; применение алгоритма, разделяющего поступившие сигналы тревог на две группы с учетом того, что время задержки между поступлением сигналов тревог в группах значительно меньше времени задержки между группами; подсчете и сравнении числа сигналов тревог в обеих группах; определении направления движения нарушителя по очередности поступления групп сигналов тревог: группа с меньшим числом сигналов тревог, группа с большим числом сигналов тревог или группа с большим числом сигналов тревог, группа с меньшим числом сигналов тревог (фиг. 3).
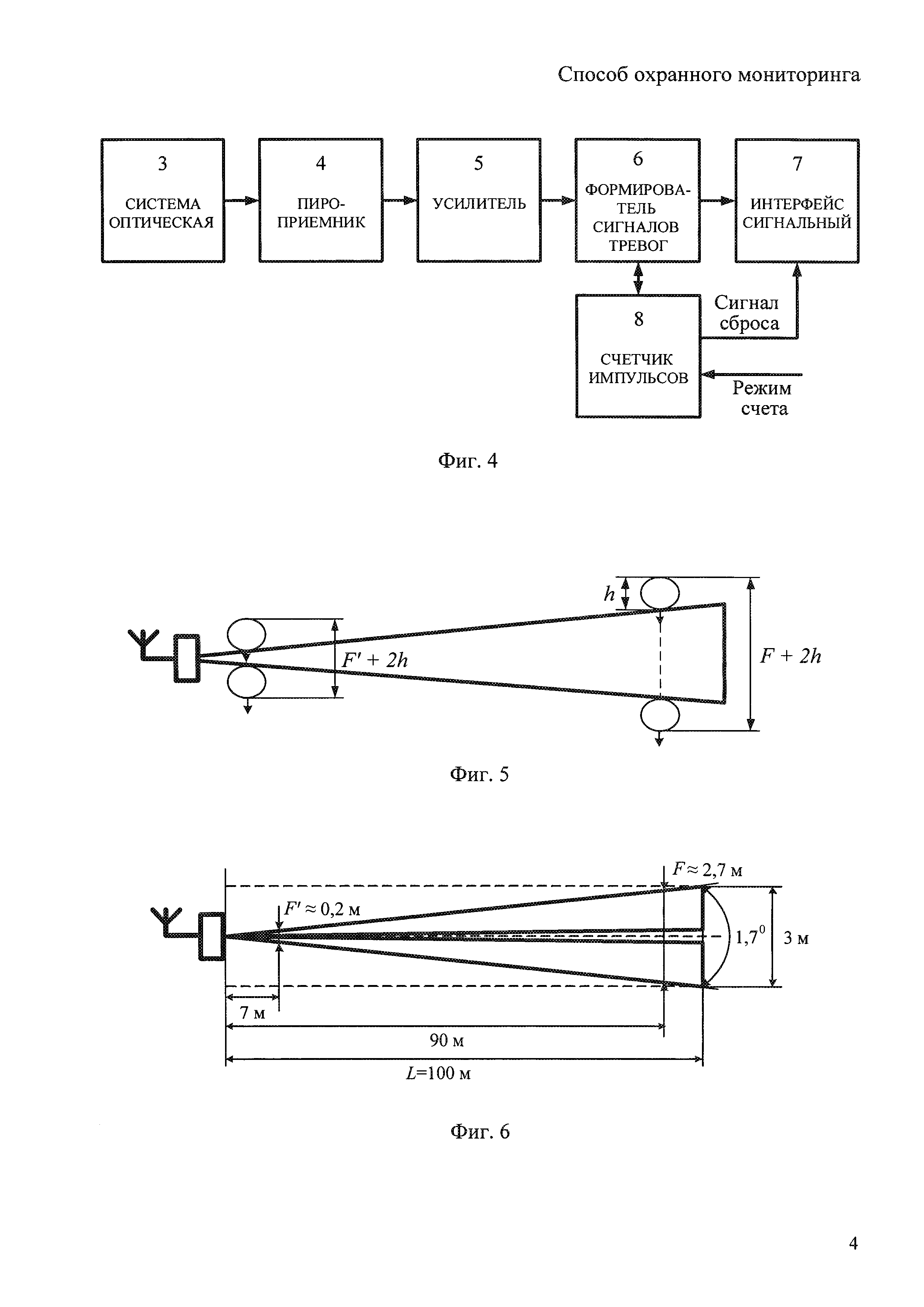
Известно, что принцип действия СО основан на регистрации разницы между интенсивностью электромагнитного излучения инфракрасного диапазона, исходящего от проникающего в контролируемую зону нарушителя, и фоновой температурой окружающей среды. Электромагнитное излучение инфракрасного диапазона с помощью системы 3 оптической фокусируется на чувствительным элементе СО, которым является пироприемник 4 (фиг. 4). Сигнал, сформированный пироприемником 4, усиливается усилителем 5 и поступает в формирователь 6 сигналов тревог. В формирователе 6 сигналов тревог превышающий пороговые значения сигнал дифференцируется и выдается команда интерфейсу 7 сигнальному на формирование сигнала тревоги, при условии достижения количества импульсов, сформированных счетчиком 8 импульсов, за период времени заданных «Режимом счета». Сброс сигнала тревоги с интерфейса 7 сигнального осуществляется счетчиком 8 импульсов с периодичностью от 1 до 2 секунд, при этом интерфейс 7 сигнальный переходит в дежурный режим (фиг. 4) [3, 4].
Если нарушитель находится в ЗО СО после сброса сигнала тревоги, то СО снова формирует сигнал тревоги до следующего сигнала сброса и т.д., если на момент сброса он вышел из ЗО, то СО переходит в дежурный режим. То есть, с момента входа нарушителя в ЗО и до момента выхода из нее СО формирует последовательность сигналов тревог с задержкой в несколько секунд между ними (фиг. 5).
Форма ЗО СО - конусообразная, ширина ее в нескольких метрах от СО - десятые доли метра (при угле раскрыва ЗО 1,7 градуса на удалении 7 метров около 0,2 м), ближе к концу зоны - несколько метров (при угле раскрыва ЗО 1,7 градуса на удалении 90 метров около 2,7 м) (фиг. 6).

где F - ширина ЗО СО ближе к концу ЗО, м;
F' - ширина ЗО СО вблизи СО, м.
Время нахождения СО в режиме тревоги зависит от места пересечения ЗО нарушителем и его габаритов, ширина тела нарушителя (h) в профиль составляет в среднем 0,3 метра [5]. СО переходит в режим тревоги с момента начала пресечения ЗО нарушителем и устанавливается в дежурный режим после выхода из ЗО, то есть фактически, при равномерной скорости движения нарушителя соотношение времени нахождения СО в режиме тревоги при пересечении нарушителем ЗО СО с шириной F и F' будет равно отношению между суммами удвоенной ширины тела нарушителя и ширинами ЗО СО на участке, ближе к концу ЗО и вблизи СО:

где t - временя нахождения СО в режиме тревоги при пересечении нарушителем участка ближе к концу ЗО (F), с;
t' - временя нахождения СО в режиме тревоги при пересечении нарушителем участка вблизи СО (F'), с;
h - ширина тела нарушителя, м;
VН - скорость движения нарушителя, м/с.
То есть время, а значит и число сигналов тревог, формируемых СО, зависит от участка пересечения ЗО СО. Чем ближе нарушитель пересекает ЗО к СО, тем меньше время нахождения СО в режиме тревоги (число сигналов тревог, формируемых СО), и наоборот. Причем эта зависимость сохраняется даже при условии неравномерности движения нарушителя.
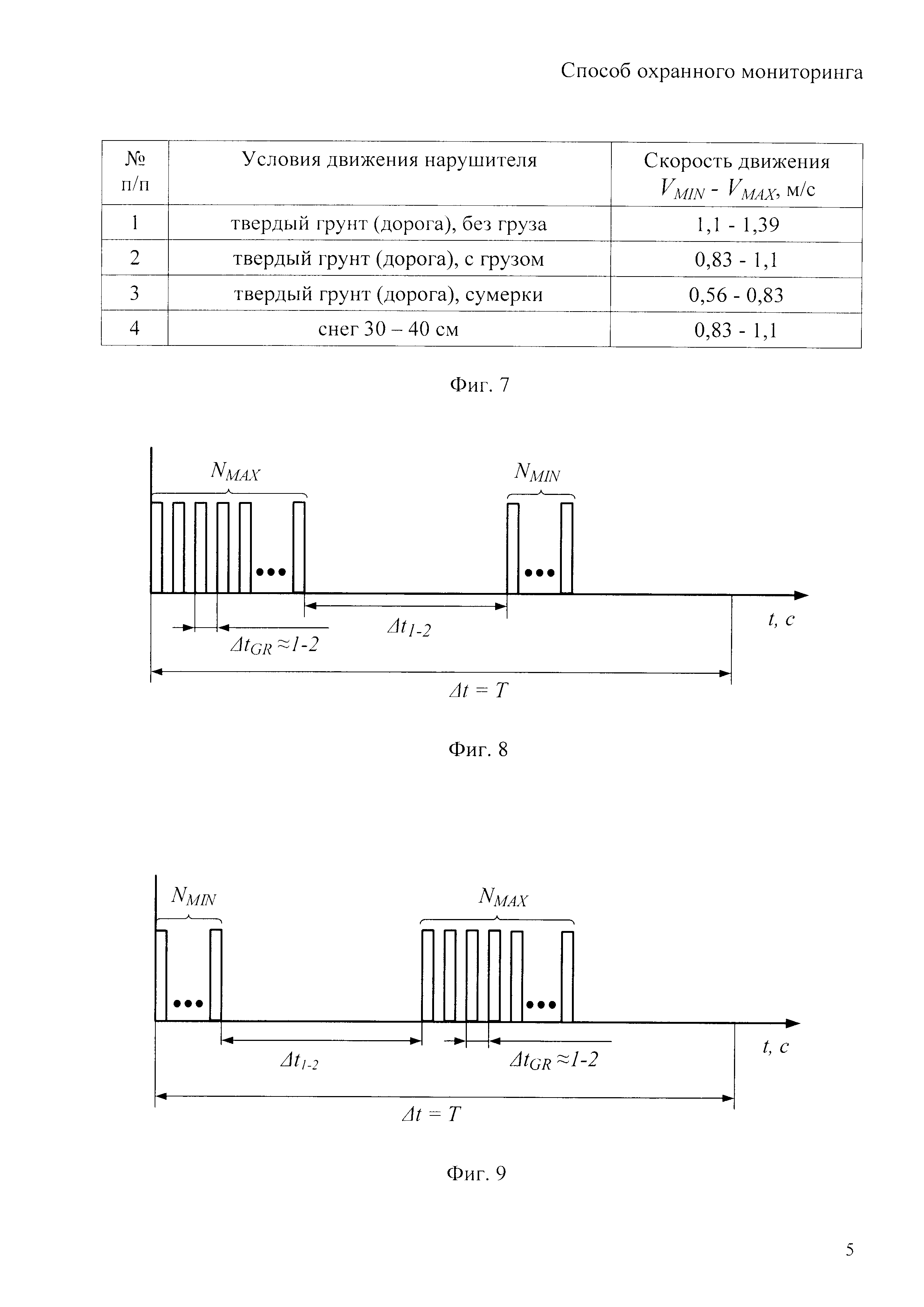
На небольшом отрезке маршрута (несколько сот метров) максимальная скорость нарушителя не превышает минимальную скорость более чем в полтора раза (фиг. 7) [1, 2, 6]:

где VMAX - максимальная скорость движения нарушителя через изгиб дороги, м/с;
VMIN - минимальная скорость движения нарушителя через изгиб дороги, м/с.
В самом неблагоприятном случае для рассматриваемого способа нарушитель может широкий участок пересечь с минимальной скоростью, а узкий - с максимальной скоростью. Для этого случая соотношение между временем нахождения средства обнаружения в режиме тревоги при пересечении этих двух участков нарушителем снизится:

Превышение разницы между временем нахождения СО в режиме тревоги при пересечении нарушителем широкого и узкого участков не менее чем в четыре раза и соответственно получение высокой достоверности вывода о направлении движения нарушителя обеспечивается за счет увеличения разницы между длиной двух участков пересечения дороги и ЗО (НA и НB). Ось ЗО пересекает дорогу на широком участке (НB) под углом (α) от 20 до 30 градусов (фиг. 3).

где β - угол пересечения оси ЗО СО и дороги в узком участке, град;
α - угол пересечения оси ЗО СО и дороги в широком участке, град;
γ - угол изгиба дороги, град;
НA - длина узкого участка пересечения дороги и зоны обнаружения, м;
HB - длина широкого участка пересечения дороги и зоны обнаружения, м.
С учетом того, что угол изгиба дороги (γ) более 90 градусов, ось ЗО будет пересекать дорогу на узком участке под более тупым углом (β).
В соответствии с формулами 4 и 5, при углах γ=90° и α=20° (фиг. 3):

В соответствии с формулами 4 и 5, при углах γ=120° и α=20° (фиг. 3):

То есть, даже с учетом неравномерности скорости движения нарушителя, схема развертывания СО обеспечивает превышение разницы между временем нахождения средства в режиме тревоги при пересечении этих двух участков нарушителем не менее чем в четыре раза.
Сигналы тревог возможно разделить между собой на две группы, так как время задержки между поступлением сигналов тревог в группах значительно меньше времени задержки между группами (фиг. 8, 9). Время задержки между поступлением сигналов тревог в группах определяется периодом сброса сигналов тревог и составляет от 1 до 2 секунд. Между группами сигналов тревог время задержки (Δt1-2) определяется скоростью движения нарушителя (VH) и расстоянием (S), пройденным им между участками пересечения зоны обнаружения и дороги (фиг. 3, 8, 9).

где Δt1-2 - время задержки между группами сигналов тревог, с;
S - расстояние между участками пересечения зоны обнаружения и дороги, м.
С учетом того, что ЗО имеет длину 100 м, расстояние между участками пересечения ЗО и дороги лежит в пределах 70-80 метров (фиг. 3):

где А'О' - расстояние между вершиной изгиба дороги и узким участком пересечения ЗО с дорогой, м;
О'В' - расстояние между вершиной изгиба дороги и широким участком пресечения ЗО с дорогой, м.
Даже при высокой скорости движения нарушителя до 10 км/час (2,8 м/с) время задержки между группами сигналов тревог будет находиться в пределе десятков секунд, в соответствии с формулой 8:

Для исключения ошибок вывода устанавливается время накопления сигналов тревог (Т) исходя из расстояния между двумя участками пресечения ЗО с дорогой, минимальной скорости движения нарушителя и коэффициента запаса 1,2 (фиг. 8, 9):

где Т - установленное время накопления поступающих сигналов тревог, с.
Минимально возможная скорость берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 7) [1, 6].
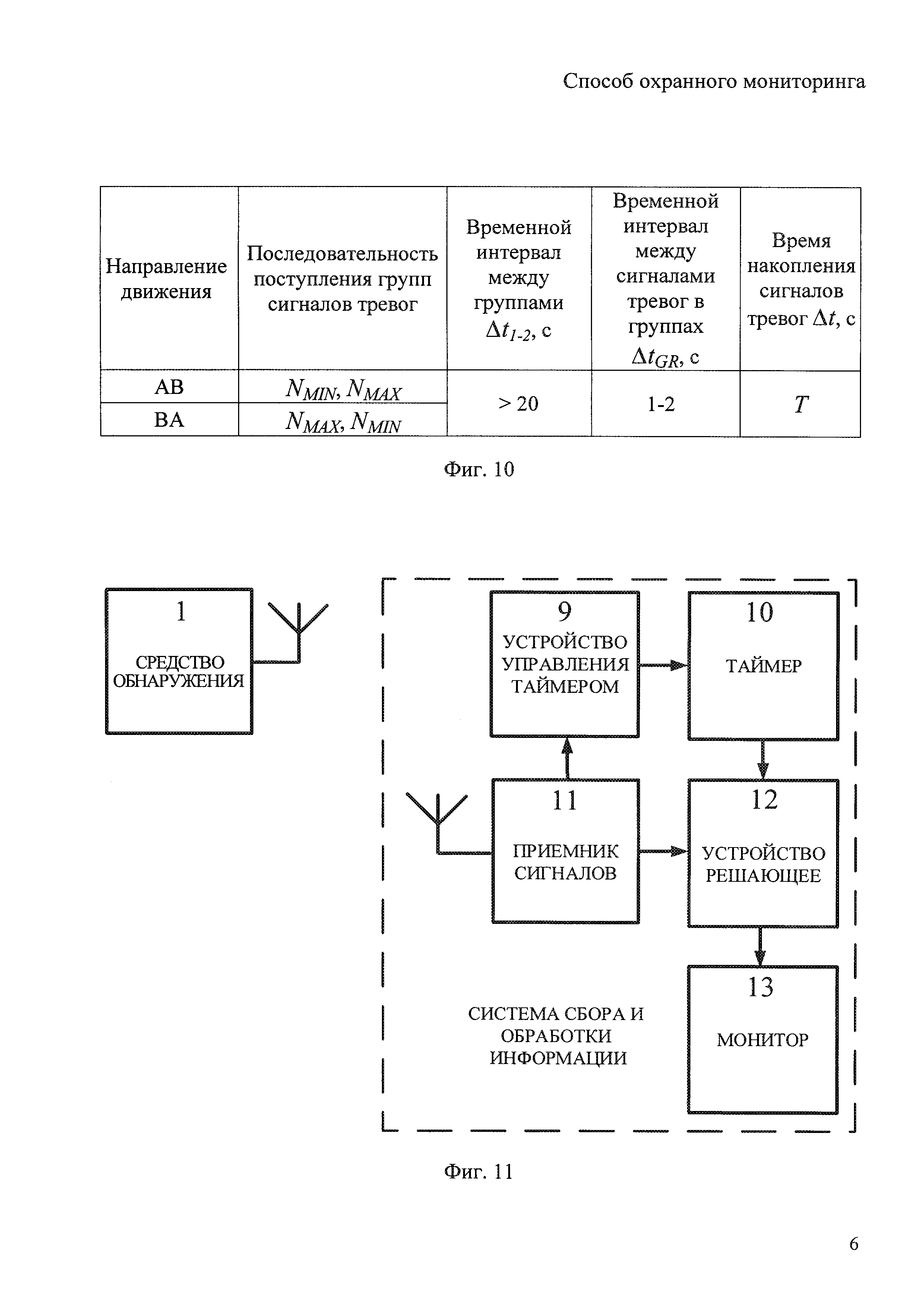
Принятие решения о направлении движения нарушителя автоматизировано: при движении нарушителя через изгиб дороги СО формирует сигналы тревог и передает их на ССОИ, которая накапливает их до достижения установленного интервала времени накопления сигналов (T). Полученные сигналы тревог в ССОИ с помощью алгоритма разделяются на две группы, количество сигналов тревог в группах подсчитывается и сравнивается, определение направления движения нарушителя осуществляется по очередности поступления групп сигналов тревог (фиг. 10):
группа с меньшим числом сигналов тревог (NMIN), группа с большим числом сигналов тревог (NMAX) - направление движения нарушителя - АВ (фиг. 9);
группа с большим числом сигналов тревог (NMAX), группа с меньшим числом сигналов тревог (NMIN) - направление движения нарушителя - ВА (фиг. 8).
Способ охранного мониторинга дороги включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание средства 1 обнаружения по установленной схеме (фиг. 3).
2. Развертывание на местности системы сбора и обработки информации, включающей в себя: устройство 9 управления таймером, таймер 10, приемник 11 сигналов, устройство 12 решающее, монитор 13 (фиг. 11).
3. Расчет установленного времени накопления поступающих сигналов тревог (T) и запись его в устройство 9 управления таймером (формула 11).
Основной этап начинается при движении нарушителя через изгиб дороги и попадании его в ЗО средства 1 обнаружения, он включает:
1. Регистрацию приемником 11 первого сигнала тревоги от средства 1 обнаружения при пересечении нарушителем его ЗО, запуск устройством 9 управления таймером - таймера 10, начало отсчета времени накопления поступающих сигналов тревог (Δt) (фиг. 4).
2. Накопление сигналов тревог устройством 12 решающим с записью времени задержки между ними до перехода средства 1 обнаружения в дежурный режим и достижения времени накопления поступающих сигналов тревог (Δt) установленного времени (Т) (фиг. 11).
3. Разделение устройством 12 решающим поступивших сигналов тревог на две группы: с учетом того, что время задержки между поступлением сигналов тревог в группах (ΔtGR) значительно меньше времени задержки между группами (Δt1-2) (фиг. 8, 9, 11).
4. Подсчет и сравнение числа сигналов тревог устройством 12 решающим в обеих группах и определение группы с большим сигналом тревог (NMAX) и группы с меньшим сигналов тревог (NMIN) (фиг. 11).
5. Определение устройством 12 решающим направления движения нарушителя по очередности поступления групп сигналов тревог:
группа с меньшим числом сигналов тревог (NMIN), группа с большим числом сигналов тревог (NMAX) - направление движения нарушителя - АВ (фиг. 9, 10);
группа с большим числом сигналов тревог (NMAX), группа с меньшим числом сигналов тревог (NMIN) - направление движения нарушителя - ВА (фиг. 8, 10).
6. Обнуление устройством 9 управления таймером - таймера 10.
7. Выведение результата на монитор 13 (фиг. 11).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания пассивного оптико-электронного средства обнаружения в известном способе охранного мониторинга с применением одного средства обнаружения;
- фиг. 2 - схема развертывания пассивного оптико-электронного средства обнаружения в известном способе охранного мониторинга с применением двух средств обнаружения;
- фиг. 3 - схема развертывания пассивного оптико-электронного средства обнаружения в предлагаемом способе охранного мониторинга, с указанием размеров;
- фиг. 4 - структурная схема пассивного оптико-электронного средства обнаружения;
- фиг. 5 - схема движения нарушителя через зону обнаружения пассивного оптико-электронного средства обнаружения;
- фиг. 6 - зона обнаружения пассивного оптико-электронного средства обнаружения с указанием размеров (вид сверху);
- фиг. 7 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 8 - временная диаграмма поступления сигналов тревог при движении нарушителя через изгиб дороги в направлении ВА;
- фиг. 9 - временная диаграмма поступления сигналов тревог при движении нарушителя через изгиб дороги в направлении АВ;
-фиг. 10 - таблица (алгоритм) принятия решения о направлении движения нарушителя через изгиб дороги;
- фиг. 11 - структурная схема взаимосвязи применяемых устройств при реализации способа охранного мониторинга.
Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
3. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
4. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
5. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
6. Баленко С.В. Школа выживания. - М., 1994. - 140 с.
Способ охранного мониторинга, заключающийся в контроле дороги одним пассивным оптико-электронным средством обнаружения; в обеспечении регистрации системой сбора и обработки информации сигналов тревоги от средства обнаружения при пересечении нарушителем его зоны обнаружения, отличающийся тем, что средство обнаружения развертывается на изгибе дороги с учетом конусообразной формы его зоны обнаружения; схема развертывания, в которой зона обнаружения и изгиб дороги пересекаются на двух участках - узком и широком, обеспечивает превышение разницы между временем нахождения средства обнаружения в режиме тревоги при пересечении этих двух участков нарушителем не менее чем в четыре раза; согласно схемы развертывания ось зоны обнаружения пересекает дорогу на широком участке под углом от 20 до 30 градусов; расстояние между точками пресечения оси зоны обнаружения и дорогой выбирается в пределах от 70 до 80 процентов от максимальной длины зоны обнаружения; средство обнаружения многократно переходит в режим тревоги во время движения нарушителя через изгиб дороги; система сбора и обработки информации накапливает сигналы тревог в течение установленного времени накопления сигналов тревог; время накопления сигналов тревог устанавливается исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения и дороги; применяется алгоритм, в котором поступившие сигналы тревог разделяются на две группы с учетом того, что время задержки между поступлением сигналов тревог в группах значительно меньше времени задержки между группами; проводятся подсчет и сравнение числа сигналов тревог в обеих группах; направление движения нарушителя определяется по очередности поступления групп сигналов тревог: группа с меньшим числом сигналов тревог, группа с большим числом сигналов тревог или группа с большим числом сигналов тревог, группа с меньшим числом сигналов тревог.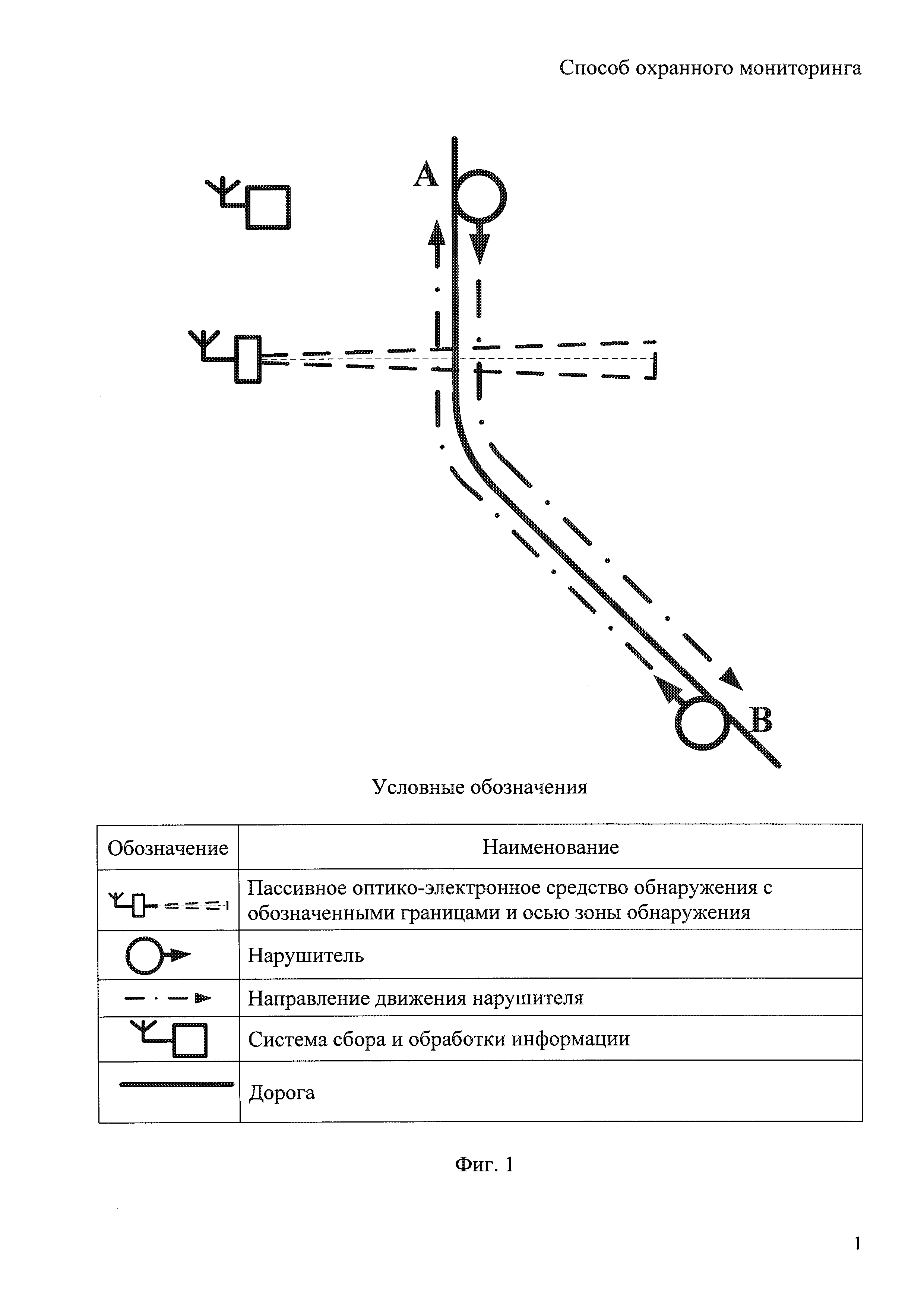
Способ повышения точности указания места нарушения обрывными средствами обнаружения
Способ определения направления движения нарушителя обрывными средствами обнаружения
Способ сигнализационного прикрытия перекрестка дорог
Способ определения места нарушения сигнализационного рубежа
Способ определения направления движения нарушителя на перекрестке дорог
Способ сигнализационного прикрытия четырехстороннего перекрестка дорог
Способ определения направления движения нарушителя на т - образном перекрестке дорог
Способ сигнализационного прикрытия локального участка местности с трехсторонней развилкой дороги
Способ сигнализационного прикрытия двухсторонней развилки дороги
Способ сигнализационного прикрытия локального участка местности с дорогой
Способ повышения точности указания места нарушения обрывными средствами обнаружения
Способ определения направления движения нарушителя обрывными средствами обнаружения
Способ сигнализационного прикрытия перекрестка дорог
Способ определения направления движения нарушителя на перекрестке дорог
Способ сигнализационного прикрытия четырехстороннего перекрестка дорог
Способ определения направления движения нарушителя на т - образном перекрестке дорог
Способ сигнализационного прикрытия локального участка местности с трехсторонней развилкой дороги
Способ сигнализационного прикрытия двухсторонней развилки дороги
Способ сигнализационного прикрытия локального участка местности с дорогой
Способ сигнализационного прикрытия перекрестка дорог

