Результат интеллектуальной деятельности: УСТРОЙСТВА И СПОСОБЫ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ В ПОДЗЕМНОМ ПЛАСТЕ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится, в целом, к устройству и способу проведения измерений в связи с нефтегазопоисковыми работами.
УРОВЕНЬ ТЕХНИКИ
При бурении скважин с целью проведения нефтегазопоисковых работ понимание структуры и характеристик связанной с этим геологической формации предоставляет информацию для помощи в таких поисковых работах. Данные для предоставления информации можно получать с помощью датчиков, расположенных в подземном пласте на больших расстояниях от поверхности. Сведения о положении этих датчиков в подземном пласте можно применять с целью составления информации для поисковых работ. Системы и методы определения положения датчиков в подземном пласте могут улучшать процесс анализа, связанный с буровыми работами.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Фиг.1 иллюстрирует типовое размещение передатчиков и приемника, размещение которых может быть применено для определения положения приемника, в соответствии с различными вариантами реализации изобретения.
Фиг.2 иллюстрирует настройку имитационного моделирования для анализа влияния частоты, в соответствии с различными вариантами реализации изобретения.
Фиг.3А-B иллюстрируют глубину в зависимости от уровней напряжения принимаемых сигналов для различных частот с целью настройки имитационного моделирования, проиллюстрированной на Фиг.2, в соответствии с различными вариантами реализации изобретения.
Фиг.4A-B иллюстрируют глубину, в зависимости от уровней напряжения принимаемых сигналов, для различных удельных электрических сопротивлений пласта при фиксированной рабочей частоте для настройки имитационного моделирования, проиллюстрированной на Фиг.2, в соответствии с различными вариантами реализации изобретения.
Фиг.5А-B иллюстрируют глубину, в зависимости от уровней напряжения принимаемых сигналов, для различных удельных электрических сопротивлений пласта при другой фиксированной рабочей частоте для настройки имитационного моделирования, проиллюстрированной на Фиг.2, в соответствии с различными вариантами реализации изобретения.
Фиг.6 иллюстрирует особенности типового алгоритма инверсии для определения положения приемника в подземном пласте, в соответствии с различными вариантами реализации изобретения.
Фиг.7 иллюстрирует особенности типового ограниченного алгоритма инверсии для определения положения приемника в подземном пласте, в соответствии с различными вариантами реализации изобретения.
Фиг.8 иллюстрирует особенности моделирования для проверки алгоритма инверсии и для анализа точности, достигнутой при определении положения одного или более датчиков для различных конфигураций системы, в соответствии с различными вариантами реализации изобретения.
Фиг.9 иллюстрирует геометрию моделирования для системы позиционирования с двумя х-направленными передатчиками на поверхности, в соответствии с различными вариантами реализации изобретения.
Фиг.10А-Е иллюстрируют результаты моделирования методом Монте-Карло в отношении геометрии моделирования, проиллюстрированной на Фиг.9, в соответствии с различными вариантами реализации изобретения.
Фиг.11А-Е иллюстрируют результаты моделирования методом Монте-Карло для системы позиционирования, проиллюстрированной на Фиг.9, положение которой ограничено относительно первого приемника, в соответствии с различными вариантами реализации изобретения.
Фиг.12 иллюстрирует геометрию моделирования для системы позиционирования двух передатчиков, при которой один из передатчиков находится под землей, в соответствии с различными вариантами реализации изобретения.
Фиг.13А-Е иллюстрируют результаты моделирования методом Монте-Карло для системы позиционирования, проиллюстрированной на Фиг.12, в соответствии с различными вариантами реализации изобретения.
Фиг.14 иллюстрирует геометрию моделирования для системы позиционирования с четырьмя передатчиками триадного типа, в соответствии с различными вариантами реализации изобретения.
Фиг.15А-Е иллюстрируют результаты моделирования методом Монте-Карло для системы позиционирования, проиллюстрированной на Фиг.14, в соответствии с различными вариантами реализации изобретения.
Фиг.16 иллюстрирует двумерный пример с передатчиками на поверхности и приемником под землей с целью проиллюстрировать способ определения положения приемника относительно источников от известных ориентаций источников, в соответствии с различными вариантами реализации изобретения.
Фиг.17 иллюстрирует двумерный пример с передатчиками на поверхности и приемником под землей, в котором приемник имеет направление профиля, в соответствии с различными вариантами реализации изобретения.
Фиг.18 иллюстрирует трехмерный пример с передатчиками на поверхности и приемником под землей, в котором приемник имеет направление профиля, в соответствии с различными вариантами реализации изобретения.
Фиг.19A-B иллюстрируют результаты моделирования методом Монте-Карло с применением полуаналитического решения для системы позиционирования, проиллюстрированной на Фиг.9, в соответствии с различными вариантами реализации изобретения.
Фиг.20 иллюстрирует электрическое поле на приемнике, вследствие магнитного диполя, являющегося перпендикулярным плоскости, в которой расположены приемник и передатчик, в соответствии с различными вариантами реализации изобретения.
Фиг.21 иллюстрирует моделированную систему для электрического поля на основании системы позиционирования, в соответствии с различными вариантами реализации изобретения.
Фиг.22А-С иллюстрируют результаты моделирования методом Монте-Карло с применением электрического поля на основании системы позиционирования, проиллюстрированной на Фиг.21, в соответствии с различными вариантами реализации изобретения.
Фиг.23 иллюстрирует блок-схему устройств типовой системы для определения положения в подземном пласте, в соответствии с различными вариантами реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следующее подробное описание ссылается на прилагаемые графические материалы, иллюстрирующие в качестве иллюстрации, а не ограничивающие различные варианты реализации изобретения, в которых изобретение может быть реализовано. Эти варианты реализации изобретения описаны достаточно подробно, чтобы обеспечить специалистам в данной области техники возможность реализовать эти и другие варианты реализации изобретения. Могут быть применены и другие варианты реализации изобретения, а также могут быть сделаны изменения в структурных, логических и электрических особенностях этих вариантов реализации изобретения. Различные варианты реализации изобретения не обязательно являются взаимоисключающими, так как некоторые варианты реализации изобретения могут быть объединены с одним или более других вариантов реализации изобретения для создания новых вариантов реализации изобретения. Следовательно, следующее подробное описание не стоит воспринимать как обладающее ограничительным характером.
В различных вариантах реализации изобретения системы и способы определения положения подземного приемника могут включать поиск положения приемника, или приемников, по измерениям, полученным приемниками, и известных положений источников, которые генерируют сигналы для данных измерений. Могут применять источники, размещенные в известных положениях либо на поверхности, либо под поверхностью земли с приемником или приемниками, расположенными под землей. Могут определять положение подземного(ных) приемника(ов) по измерениям сигналов, генерируемых множественными передающими источниками, положения которых точно известны.
Могут применять передающие источники электромагнитного типа и приемники в системах для определения положения под землей. Такие передающие источники могут включать, среди прочего, дипольные передатчики, источники, генерирующие большое распределение тока на поверхности или вблизи поверхности земли, создающие электромагнитные поля под землей, где электромагнитные поля, измеряемые в приемнике, или другие источники могут генерировать сигнал, измеряемый в приемнике глубоко в подземной формации. Диполи источников могут быть ориентированы в направлении, перпендикулярном исследуемой области, причем исследуемая область включает приемный источник, который необходимо определить. Эта ориентация может учитывать нулевую точку вдоль направления диполя. Передающие источники могут быть реализованы с помощью одного или более триадных передатчиков. Триадный передатчик представляет собой устройство, содержащее три передающих источника в одном и том же месте, а положение или ориентация трех передающих источников являются различными. Три передающих источника триады могут быть установлены на одном и том же устройстве в конкретном месте. Передающими источниками на поверхности или вблизи поверхности земли можно управлять для генерирования сигналов, имеющих низкую частоту для проникновения глубоко под землю таким образом, что такие сигналы измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины. В качестве альтернативы, другие типы передатчиков, применяемые в индустрии исследований нефтяных месторождений, такие как, среди прочего, акустические датчики и сейсмические датчики, могут применять в системах для определения положения под землей. Количество передающих источников может включать три или более передающих источников. В варианте реализации изобретения три передающих источника могут быть реализованы посредством единого триадного передатчика.
Приемником или приемниками можно управлять с помощью электронных устройств, расположенных под землей. Кроме того, блок обработки может быть расположен в глубине скважины для анализа сигналов, получаемых приемником. Блок обработки может быть реализован при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Блок обработки может быть реализован при помощи электронных устройств, размещенных на устройстве, на котором размещен приемник, и отделен от приемника. Блок обработки и контроллер приемника, расположенные в глубине скважины, могут обеспечивать автоматизированное направленное бурение. В качестве альтернативы, блок обработки может располагаться на поверхности, отвечая на прием сигналов или данных относительно сигналов от приемника.
Фиг.1 иллюстрирует типовой вариант реализации размещения передатчиков и приемника, размещение которых может быть применено для определения положения приемника. На Фиг.1 проиллюстрированы три передатчика, обозначенные как Tx1, Tx2 и Tx3, например, в разных положениях относительно приемного датчика, Rх1. Tx1 и Tx2 находятся на поверхности 104, в то время как Tx3 находится под землей внутри скважины, отличной от той, в которой находится Rx1. Эта фигура представляет собой двумерную (2D) фигуру, предоставленную с целью иллюстрации, в которой передатчики расположены в одной и той же плоскости. В различных вариантах реализации изобретения передающие источники, применяемые для определения положения приемного датчика, лежат в плоскости, общей для не более чем двух передатчиков и датчика приемника. При наличии передающих датчиков, соответствующих этому условию, можно достигать лучшей разрешающей способности принимаемых сигналов в процессе измерения. Кроме того, количество передатчиков, количество приемников или количество передатчиков и приемников может быть увеличено для улучшения разрешающей способности.
Количество передатчиков и положения передатчиков также могут быть оптимизированы посредством применения известных методов оптимизации, в зависимости от применения. Тем не менее, при обсуждении вариантов реализации изобретения анализируют воздействия количества передатчиков и их положения при помощи результатов численного моделирования. Датчики приемника и передатчики были выбраны в качестве триадных антенн, как проиллюстрировано на Фиг.1, в имитационных моделированиях для повышения точности инверсии, хотя это не является необходимым для действия вариантов реализации способов, относящихся к определению положения в подземном пласте. Как проиллюстрировано на Фиг.1, передающие источники Tx1, Tx2 и Tx3, сконструированные в виде трех триад, могут обеспечить 9 передающих источников в трех местах 9 положениями или ориентациями. Приемный датчик Rх1 также может быть сконструирован в виде триадного приемного датчика, содержащего три приемника в одном месте с тремя положениями или ориентациями.
Увеличение количества передающих источников на каждый передающий источник в известном месте может увеличить объем информации, применяемой для определения положения приемника или приемников в подземных пластах. К тому же, передающие источники не ограничены применением одного и того же типа передающего источника. Например, схемы расположения могут включать два триадных передатчика среди трех или более передатчиков, распределенных по довольно обширной области. Другие схемы расположения могут включать передающий источник, сконструированный в виде цепи, распределенной по довольно большой области на поверхности или вблизи поверхности земли. Цепь может включать замкнутый контур, содержащий токонесущий провод, при этом токонесущий провод находится в известном положении и токонесущий провод расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Сигнал на приемник может, преимущественно, посылать этот одиночный токонесущий провод с остальными частями цепи, которые замыкают контур, расположенный на таких расстояниях от приемника, что сигналы от этих других частей, в сущности, затухают перед поступлением на приемник. В качестве альтернативы, передающий источник может быть структурирован в виде цепи, содержащей замкнутый контур с множеством токонесущих проводов, при этом каждый токонесущий провод находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Принимаемые приемником сигналы могут быть обработаны на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий.
Низкочастотные электромагнитные волны могут проникать глубоко под поверхность земли. С помощью низкочастотных источников (f<10 Гц) создаваемые источниками поля будут поддаваться измерению при положениях глубоко под землей. В одном варианте реализации изобретения можно применять низкочастотные источники, обладающие частотой, меньшей или равной 50 Гц. Приемник, размещенный в стволе скважины под поверхностью, может измерять сигналы, генерируемые данными источниками. Эти сигналы от каждого из источников могут быть обработаны для определения расстояния, ориентации или и расстояния, и ориентации. В различных вариантах реализации изобретения определение положения можно выполнять на глубинах вплоть до 10000 метров.
Первый фактор включает влияние частоты на сигналы, которые проникают вглубь пласта. По мере того как частота усиливается, затухание под землей увеличивается таким образом, что на более высоких частотах затухание является более ощутимым и может ослаблять сигналы ниже уровня помех. Еще одним немаловажным фактором является то, что более высокие частоты являются также более чувствительными по отношению к пласту, что может существенно влиять на принимаемый сигнал. Это означает, что на более высоких частотах решение по поводу положения приемника(ов) в определенной степени зависит от параметров соединения и от в большинстве случаев точно не известной информации о пласте. Типовые варианты реализации способов определения положения под землей могут быть реализованы при работе в одночастотном режиме. Однако в других вариантах реализации изобретения особенности способов, относящихся к определению положения под землей, могут быть реализованы при работе во многочастотном режиме.
Фиг.2 иллюстрирует настройку имитационного моделирования для анализа влияния частоты. С целью анализа влияния частоты вычисляют изменение с глубиной уровня сигнала в качестве функции частоты при наличии индивидуального передатчика. Передатчик и приемный датчик были смоделированы как катушечные антенны с нормалью, параллельной радиальному направлению земли. В дальнейшем ось, перпендикулярная поверхности земли, будет обозначаться как ось z. При такой методике моделируемый случай иллюстрирует ZZ-соединение. Другие ортогональные компоненты (XX-соединение и YY-соединение) обладают аналогичными характеристиками и не проиллюстрированы.
В этом имитационном моделировании приемный датчик Rx находится непосредственно под передатчиком Тх. С целью иллюстрации, каждый из приемника и рамочных антенн передатчика, как полагают, имеет единичную площадь с 400 витками, а передатчик, как полагают, проводит ток в 25 А. Проектные параметры могут отличаться, в зависимости от заданий технического проектирования для конкретного применения. Однако, чтобы иметь способность передавать сигнал на такие большие глубины, уровень передаваемой мощности должен быть высоким и приемный датчик должен быть структурирован как высокочувствительный приемник. Ввиду вопроса об уровне мощности может быть также более практичным установить передатчики на поверхности 204, по сравнению со случаями, когда некоторые или все передатчики находятся под землей. Характеристики пласта, применяемые в имитационном моделировании, также проиллюстрированы на Фиг.2. Учитывали определенный сценарий по наихудшему варианту с проводящим пластом, имеющим удельное электрическое сопротивление, Rf, равное 1 Ом/м. Относительная диэлектрическая проницаемость (εr) и магнитная проницаемость (μr) были выбраны как 5 и 1, соответственно.
Фиг.3А-B иллюстрируют глубину в зависимости от уровней напряжения принимаемых сигналов в случае различных частот для настройки имитационного моделирования на Фиг.2. Фиг.3А иллюстрирует изменение абсолютного значения напряжения в зависимости от глубины для четырех различных частот, а Фиг.3B иллюстрирует изменение фазы напряжения в зависимости от глубины для четырех различных частот. Кривые 342, 344, 346 и 348 иллюстрируют глубину как функцию абсолютного значения напряжения на частотах 0,01 Гц, 0,1 Гц, 1 Гц и 10 Гц, соответственно. Кривые 352, 354, 356 и 358 иллюстрируют глубину как функцию фазы напряжения на частотах 0,01 Гц, 0,1 Гц, 1 Гц и 10 Гц, соответственно. На 1 Гц и 10 Гц сигнал быстро затухает. Можно также наблюдать зацикливание в фазе, что может усложнять процесс инверсии. Для сравнения, когда частота понижается, затухание сигнала вызывает меньше затруднений. Однако в случае таких низких частот начальная мощность сигнала уже низкая. Таким образом, даже для 0,01 Гц и 0,1 Гц уровень напряжения доходит до 10 фемтовольт на 10000 м для моделируемых конфигураций передатчика и приемника. Результаты позволяют предположить, что в случае применяемых параметров имеется лишь незначительное улучшение в затухании для частот ниже 0,1 Гц. Таким образом, в других описываемых в данном документе имитационных моделированиях предполагаемая частота режима работы составляла 0,1 Гц.
Фиг.4A-B иллюстрируют глубину в зависимости от уровней напряжения принимаемых сигналов для различных удельных электрических сопротивлений при фиксированной рабочей частоте. С целью анализа воздействия удельного электрического сопротивления пласта ту же конфигурацию, что была проиллюстрирована на Фиг.2, применяли с частотой, установленной на постоянной величине 0,1 Гц, а удельное электрическое сопротивление пласта варьировало от 0,1 Ом/м до 100 Ом/м. Кривые 442, 444, 446 и 448 иллюстрируют глубину как функцию абсолютного значения напряжения при значениях удельного электрического сопротивления пласта 0,1 Ом/м, 1 Ом/м, 10 Ом/м и 100 Ом/м, соответственно. Кривые 452, 454, 456 и 458 иллюстрируют глубину как функцию фазы напряжения при значениях удельного электрического сопротивления пласта 0,1 Ом/м, 1 Ом/м, 10 Ом/м и 100 Ом/м, соответственно. Воздействие удельного электрического сопротивления пласта на принимаемый сигнал можно рассматривать как незначительное, за исключением чрезвычайно проводящих пластов. Соответственно, этим воздействием можно пренебречь или его можно устранить при помощи основной корректирующей схемы. Тем не менее, предполагали, что в случае описанных в данном документе примеров удельное электрическое сопротивление пласта было точно известно.
Фиг.5A-B иллюстрируют глубину в зависимости от уровней напряжения принимаемых сигналов для различных удельных электрических сопротивлений пласта при другой фиксированной рабочей частоте, в соответствии с различными вариантами реализации изобретения. Ту же конфигурацию, проиллюстрированную на Фиг.2, применяли с частотой, установленной на постоянной величине 0,01 Гц, а удельное электрическое сопротивление пласта варьировало от 0,1 Ом/м до 100 Ом/м. Кривые 542, 544, 546 и 548 иллюстрируют глубину, как функцию абсолютного значения напряжения при значениях удельного электрического сопротивления пласта 0,1 Ом/м, 1 Ом/м, 10 Ом/м и 100 Ом/м, соответственно. Кривые 546 и 548 накладываются таким образом, что расхождения не заметны в шкалах Фиг.5А. Кривые 552, 554, 556 и 558 иллюстрируют глубину, как функцию фазы напряжения при значениях удельного электрического сопротивления пласта 0,1 Ом/м, 1 Ом/м, 10 Ом/м и 100 Ом/м, соответственно. Результаты в отношении 0,01 Гц, проиллюстрированные на Фиг.5, демонстрируют очень небольшую зависимость от удельного электрического сопротивления пласта для рассматриваемого диапазона глубин. Тем не менее, такая низкая частота может создавать трудности при реализации аппаратного обеспечения системы.
Фиг.6 иллюстрирует особенности типового алгоритма инверсии для определения положения приемника в подземном пласте. Этот алгоритм инверсии показывает, как положение принимающего датчика может быть определено с помощью множества передатчиков, расположенных в ранее известных местах. В блоке 610 осуществляют измерение сигналов, обусловленных различными N-передатчиками, на приемнике. Эти сигналы объединяются в вектор-столбец, обозначенный как V в блоке 620. Хотя индивидуальный приемник относительно N-передатчиков указан в блоках 610 и 620, более сложные измерения могут быть рассмотрены аналогичным или идентичным образом. Например, если приемники или передатчики являются многокомпонентными, каждые из отдельно вводимых данных (VTxRx) становятся вектором с отдельными компонентами в качестве элемента указанного вектора. Примеры таких приемников и передатчиков включают триадные приемники и триадные передатчики. Если в наличии имеются множественные частоты, результаты этих измерений могут быть добавлены к вектору измерения и так далее. Как только получают это напряжение, его можно дополнительно обрабатывать в зависимости от применения. Например, если сигнал от одного из передатчиков является слишком мощным по сравнению с остальными, амплитуды принимаемого сигнала от различных передатчиков могут быть нормализованы для удостоверения в том, что весовое значение каждого передатчика в инверсии такое же.
В алгоритме инверсии определение положения и направления принимающего(щих) датчика(ов) является интересующим объектом. Таким образом, интересующие параметры обозначают, как положение датчика приемника (х, у, z), его азимут (θ) и его угол возвышения (ϕ). В блоке 630 сделана исходная приближенная оценка в отношении параметров положения и направляющих параметров (x’, y’, z’, θ’, ϕ’). Сигнал, соответствующий исходной приближенной оценке в отношении параметров положения и направляющих параметров (x’, y’, z’, θ’, ϕ’), моделируют с помощью прямой модели, которая обозначена как V’ в блоке 640. Как и в любом алгоритме инверсии, в этом способе реализации изобретения применяют точную прямую модель, относящуюся к параметрам, которые необходимо инвертировать в измеряемый сигнал.
В блоке 650 норму разности между V и V’ сопоставляют с пороговым значением. Если норма разности между V и V’ ниже заданного порогового значения, то процесс обработки могут прекратить и обрабатываемые параметры (x’, y’, z’, θ’, ϕ’) могут считать точными приближениями к истинным параметрам (x, y, z, θ, ϕ) в блоке 660. На этом этапе можно применять и другой критерий сходимости.
Если сходимость не является удовлетворяющей, число итераций может быть увеличено на один в блоке 670. Чтобы предотвратить, например, бесконечные имитационные моделирования для случаев, когда возможно решение ниже порогового значения, как, например, в условиях чрезвычайно высокого уровня помех, или чтобы ограничить время имитационного моделирования, число итераций могут сопоставить с ранее установленным максимальным числом итераций в блоке 680. Если максимальное число итераций достигнуто, обработку можно прекратить на последней приближенной оценке или предшествующей приближенной оценке, которая минимизирует погрешность, возвращенную в качестве ответа, в блоке 685. В противном случае, вектор приближенной оценки параметра обновляют в блоке 690, V’ снова моделируют в блоке 640 на основании данной приближенной оценки и могут повторить вышеуказанный процесс сопоставления технологического сигнала с измеряемым сигналом и последующих сопоставлений. Обновление вектора приближенной оценки может быть основано на вычислении величины уклона, что минимизирует погрешность.
Альтернативные алгоритмы инверсии могут быть применены с аналогичным успехом. Такие алгоритмы инверсии могут включать применение таблицы подстановки. Другой альтернативный алгоритм инверсии может включать применение метода перебора, который подставляет большое число возможных входных комбинаций и выбирает комбинацию, сводящую к минимуму погрешность между измеренными данными и прямой моделью. Альтернативные алгоритмы инверсии не ограничиваются этими альтернативами, а могут включать другие альтернативные алгоритмы инверсии или их комбинации.
Фиг.7 иллюстрирует особенности типового ограниченного алгоритма инверсии для определения положения приемника в подземном пласте, в соответствии с различными вариантами реализации изобретения. Ограничение может быть применено как один из ряда различных методов, используемых для уменьшения погрешности в инверсии. Одним из таких методов является добавление второго датчика, положение которого относительно первого датчика точно известно. Хотя эти два датчика должны быть расположены близко друг другу в электрическом плане, тем самым обеспечивая мало независимую информацию, тот факт, что искажения в отдельных датчиках должны быть, в основном, независимы, позволит повысить точность инверсии. Инверсия в данном случае может быть аналогичной инверсии с помощью индивидуального приемника, проиллюстрированного на Фиг.6.
В блоке 710 осуществляют измерение сигналов, обусловленных различными N-передатчиками, на двух приемниках. Эти сигналы объединяют в вектор-столбец, обозначенный как V в блоке 720, обеспечивая в два раза больше компонентов в качестве измеряемого сигнала в способах, относящихся к Фиг.6. Эти измеряемые сигналы могут быть приняты и обработаны способом, аналогичным вариантам обработки измеряемых сигналов, в соответствии с Фиг.6.
В алгоритме инверсии определение положения и направления принимающего(щих) датчика(ов) является интересующим объектом. Таким образом, интересующие параметры обозначают как положение датчика приемника (х, у, z), его азимут (θ) и его угол возвышения (ϕ). В блоке 730 сделана исходная приближенная оценка в отношении параметров положения и направляющих параметров (x’, y’, z’, θ’, ϕ’) одного из датчиков. Поскольку точное положение второго датчика по отношению к первому датчику известно, приближенная оценка его положения и ориентации могут быть рассчитаны на основании первой приближенной оценки в блоке 735. Сигнал, соответствующий исходной приближенной оценке положения и направляющих параметров обоих приемников, моделируют с помощью прямой модели, которая обозначена как V’ в блоке 740. Точная прямая модель, которая относится к параметрам, которые необходимо инвертировать в измеряемый сигнал, может быть применена в этом способе.
В блоке 750 норму разности между V и V’ для обоих приемников сопоставляют с пороговым значением. Если норма разности между V и V’ ниже заданного порогового значения, то процесс обработки могут прекратить и обрабатываемые параметры (x’, y’, z’, θ’, ϕ’) могут считать точными приближениями к истинным параметрам (x, y, z, θ, ϕ) в блоке 760. На этом этапе можно применять и другой критерий сходимости.
Если сходимость не является удовлетворяющей, число итераций может быть увеличено на один в блоке 770. Чтобы предотвратить, например, бесконечные имитационные моделирования для случаев, когда возможно решение ниже порогового значения, как, например, в условиях чрезвычайно высокого уровня помех, или чтобы ограничить время имитационного моделирования, число итераций могут сопоставить с ранее установленным максимальным числом итераций в блоке 780. Если максимальное число итераций достигнуто, обработку можно прекратить на последней приближенной оценке или предшествующей приближенной оценке, которая минимизирует погрешность, возвращенную в качестве ответа, в блоке 785. В противном случае, вектор приближенной оценки параметра обновляют в блоке 790 посредством параметров для другого обновленного приемника, поскольку точное положение второго датчика относительно первого датчика известно. V’ снова моделируют в блоке 740 на основании данных приближенных оценок и могут повторить вышеуказанный процесс сопоставления технологического сигнала с измеряемым сигналом и последующих сопоставлений. Обновление вектора приближенной оценки может быть основано на вычислении величины уклона, что минимизирует погрешность.
Фиг.8 иллюстрирует особенности имитационного моделирования для проверки алгоритма инверсии и для анализа точности, достигнутой при определении положения одного или более датчиков для различных конфигураций системы. Эти имитационные моделирования были проведены как моделирования методом Монте-Карло. В блоке 810 процесс начинается с вектора истинного положения/ориентации (x, y, z, θ, ϕ). В моделированиях методом Монте-Карло находят идеальный сигнал в блоке 820, с применением прямой модели, соответствующей вектору положения/ориентации (x, y, z, θ, ϕ). Для имитационного моделирования искажений окружающей среды и системы и других погрешностей измерений, могут добавить случайные искажения, ηi, к идеальному сигналу, Videal, чтобы создать "измеряемый" сигнал 610 в соответствии с Фиг.6 и 710 в соответствии с Фиг.7. Искажения, добавленные к каждой строке Vi, то есть каждому каналу, выбирают таким образом, чтобы они были независимыми друг от друга. В этом случае нижний индекс i представляет собой число итераций по моделированию методом Монте-Карло. Равномерное распределение между (-0,5 и 0,5) применяют для образования случайного искажения. Затем амплитуду такого случайного искажения масштабируют и добавляют мультипликативным способом к исходному сигналу следующим образом:
 (1)
(1)
В уравнении (1) j представляет собой индекс строк векторов Vi и Videal, u(-0,5,0,5) представляет собой равномерное случайное искажение, имеющее значения в диапазоне от -0,5 до 0,5, и SNR представляет собой масштабный коэффициент, представляющий отношение измеренной величины сигнала к фону искажений. В имитационных моделях было определено, что SNR будет составлять 50. Затем Vi инвертируют для образования приближенной оценки (xi, yi, zi, θi, ϕi) для итерации I, сохраняемой в блоке 840. Описанный выше процесс повторяют N раз, применяя счетчик в блоке 850, чтобы быть в состоянии точно анализировать осуществление инверсии для изменяющихся искажений. Выбранное число итераций (N) составляет 100 в имитационных моделях.
Фиг.9 иллюстрирует геометрию моделирования для системы позиционирования с двумя х-направленными передатчиками на поверхности. Эталонная система координат в выражении (х, z), на которой z находится в направлении от поверхности 904, проиллюстрирована на Фиг.9 с началом координат (0, 0) на проиллюстрированных оси x и оси z. Система позиционирования в данном примере состоит из двух одинаковых передатчиков, Tx1 и Tx2, которые являются x-направленными магнитными диполями. Эти передатчики расположены в положениях (х, у, z)=(1000, 0, 0) метров и (3000, 0, 0) метров по отношению к началу координат, при этом x, y и z представляют собой положения в x-направлении, y-направлении и z-направлении по отношению к эталонной системе координат. Приемник Rx представляет собой триаду магнитных диполей. Его выбранное положение составляет (2300, 0, zrec), при этом zrec представляет собой фактическую вертикальную глубину (TVD) и изменяется от 100 м до 10000 м с интервалом 100 м с целью имитационного моделирования спуска приемника в грунт. Rx, как предполагают, имеет угол возвышения 70° и азимутальный угол 50°. Пласт, как предполагают, имеет удельное электрическое сопротивление Rf=1 Ом/м, относительную диэлектрическую проницаемость εr=5 и относительную магнитную проницаемость μr=1. Хотя Rх, Tx1 и Tx2 лежат в одной плоскости в этом конкретном примере, инверсия не включает эту информацию. Иными словами, предполагают, что Rx может располагаться где угодно в 3-мерном пространстве. Кроме того, буровая установка 902, Tx1 и Tx2 находятся на поверхности 904 в иллюстративных целях, и пласт 901, как предполагают, является однородным.
Напряжение, полученное Rx датчиком для этой системы, является вектором с шестью компонентами. С целью решить положение и ориентацию Rx имеется пять неизвестных величин в задаче. Таким образом, решение переопределено. Придерживаясь аналогичных рассуждений, можно заметить, что даже с индивидуальным передатчиком и индивидуальным триадным приемником позиционирование возможно в случае, если ориентация датчика известна с помощью других средств. Например, ориентация Rx может быть определена с применением инклинометров.
Фиг.10А-Е иллюстрируют результаты моделирования методом Монте-Карло в отношении геометрии моделирования, проиллюстрированной на Фиг.9. Такие результаты получены со 100 повторениями в каждой глубинной точке, zrec, Rx. Кривые 1042, 1052, 1062, 1072 и 1082 показывают среднюю погрешность между положением датчика и имитационными моделями. Кривые 1044, 1054, 1064, 1074 и 1084 показывают плюс одно среднеквадратичное отклонение погрешности от среднего значения. Кривые 1046, 1056, 1066, 1076 и 1086 показывают минус одно среднеквадратичное отклонение погрешности от среднего значения. В моделировании методом Монте-Карло, если рассогласование между измеренным напряжением и напряжением, полученным с применением инвертированных параметров, выше порогового значения, такую конкретную инверсию отбрасывают. Это похоже на ситуацию в режиме реального времени, в которой инверсия считалась бы бесполезной, если бы напряжение, рассчитанное по инвертированным параметрам, имело большую разность в отношении измеряемого напряжения. По этим результатам можно увидеть, что ориентация датчика может быть точно определена даже на больших глубинах. Определение положения менее точно, но средняя погрешность, как правило, остается в пределах 5 метров по каждому компоненту положения.
Фиг.11А-Е иллюстрируют результаты моделирования методом Монте-Карло для системы позиционирования, проиллюстрированной на Фиг.9, при котором применяют второй приемник, положение которого ограничено относительно первого приемника. В имитационном моделировании положение второго приемника ограничено относительно первого приемника таким образом, что второй приемник находится на 10 м ниже первого приемника по оси инструмента, а ориентация обоих приемников одна и та же. Кривые 1142, 1152, 1162, 1172 и 1182 показывают среднюю погрешность между положением датчика и имитационными моделями. Кривые 1144, 1154, 1164, 1174 и 1184 показывают плюс одно среднеквадратичное отклонение погрешности от среднего значения. Кривые 1146, 1156, 1166, 1176 и 1186 показывают минус одно среднеквадратичное отклонение погрешности от среднего значения. Незначительное улучшение в осуществлении инверсии могут наблюдать при дополнительных сведениях, полученных из этого второго приемника.
Фиг.12 иллюстрирует геометрию моделирования для системы позиционирования двух передатчиков, при которой один из передатчиков находится под землей. Эта система является, по существу, такой же, как геометрия, проиллюстрированная на Фиг.9, за исключением того, что один из передатчиков, Tx1, расположен под землей в точке (1000, 0, 1000) по отношению к началу координат в передатчике, Tx2, на поверхности (3000, 0, 0). Приемник, Rx, на (2300, 0, zrec), как предполагают, имеет угол возвышения 70° и азимутальный угол 50°. Пласт, как предполагают, имеет удельное электрическое сопротивление Rf=1 Ом/м, относительную диэлектрическую проницаемость εr=5 и относительную магнитную проницаемость μr=1.
Фиг.13А-Е иллюстрируют результаты моделирования методом Монте-Карло в отношении системы позиционирования, проиллюстрированной на Фиг.12. Кривые 1342, 1352, 1362, 1372 и 1382 показывают среднюю погрешность между положением датчика и имитационными моделями. Кривые 1344, 1354, 1364, 1374 и 1384 показывают плюс одно среднеквадратичное отклонение погрешности от среднего значения. Кривые 1346, 1356, 1366, 1376 и 1386 показывают минус одно среднеквадратичное отклонение погрешности от среднего значения. Результаты аналогичны случаю с обоими передатчиками на поверхности. На самом деле, можно наблюдать незначительное улучшение в осуществлении инверсии, которое можно объяснить тем, что положение датчиков в системе позиционирования, проиллюстрированной на Фиг.12, лучше охватывает пространство. Таким образом, информация, полученная из этих двух передатчиков, более независима.
Фиг.14 иллюстрирует геометрию моделирования для системы позиционирования с четырьмя передатчиками триадного типа. Типовая система позиционирования, которую моделировали, состоит из передатчиков триадного типа, Tx1, Tx2, Tx3 и Tx4, в положениях (1000, 0, 1000), (2000, 1000, 0), (2000, -1000, 0) и (3000, 0, 0), соответственно. Развернутая система может содержать передатчики в разных положениях и может содержать увеличенное количество передатчиков. Для имитационного моделирования приемник Rx представляет собой приемник триадного типа на (2300, 0, zrec), при этом zrec представляет собой фактическую вертикальную глубину, а Rx имеет угол возвышения 70° и азимутальный угол 50°. Пласт, как предполагают, имеет удельное электрическое сопротивление Rf=1 Ом/м, относительную диэлектрическую проницаемость εr=5 и относительную магнитную проницаемость μr=1. Результаты имитационного моделирования показывают, что дальнейших улучшений можно достичь путем применения передатчиков триадного типа и увеличения количества передатчиков.
Фиг.15А-Е иллюстрируют результаты моделирования методом Монте-Карло в отношении системы позиционирования, проиллюстрированной на Фиг.14. Кривые 1542, 1552, 1562, 1572 и 1582 показывают среднюю погрешность между положением датчика и имитационными моделями. Кривые 1544, 1554, 1564, 1574 и 1584 показывают плюс одно среднеквадратичное отклонение погрешности от среднего значения. Кривые 1546, 1556, 1566, 1576 и 1586 показывают минус одно среднеквадратичное отклонение погрешности от среднего значения. Среднеквадратичное отклонение погрешности сокращается почти в два раза по сравнению с системой, проиллюстрированной на Фиг.12.
Можно применять способы, отличные от применения полной инверсии с целью найти положение датчика (или датчиков) приемника в подземном пласте. Эти другие способы обеспечивают полуаналитические формулировки, чтобы найти положение. Например, после определения углового положения источников на основании измерений можно затем путем геометрических тождеств найти положение приемника. Применение лишь данных об угловых размерах может быть полезным в некоторых ситуациях, если на мощность сигнала от источников могут оказывать воздействие другие параметры, чем расстояние. Например, дисперсия или эффекты преломления среды между источником и приемником могут воздействовать на мощность сигнала от источников. После того как направление источников найдено, например, с помощью способов инверсии, углы (θисточник, ϕисточник) для каждого источника известны. После того как найдены ориентации различных источников на поверхности или внутри пласта, положение подземного приемника относительно источников можно вывести путем геометрических тождеств. Дополнительную информацию можно получить благодаря направлению полей каждой передающей антенны. Информация о направлении полей может помочь уменьшить погрешность в определении положения приемника.
Фиг.16 иллюстрирует 2-мерный пример с передатчиками, Tx1, Tx2, Tx3, на поверхности и приемником, Rx, под землей с целью проиллюстрировать способ определения положения приемника относительно источников по известным ориентациям источников. Положение Rx под землей может быть найдено с применением полуаналитических формулировок путем измерения угловой ориентации источников на поверхности и решения тригонометрической задачи, связанной с передатчиками и приемником, в которой положение источников на поверхности точно известно. Дополнительную информацию можно получить благодаря направлению полей каждой передающей антенны. Информация о направлении полей может помочь уменьшить погрешность в определении положения приемника. Однако в данном примере предполагают информацию о направлении лишь антенн, а не электрических полей.
В этом 2D-примере, проиллюстрированном на Фиг.16, все передатчики и приемник расположены в одной и той же плоскости. В данном случае Rx не имеет никакой точки отсчета для измерения угла источников. Измеряют углы α и β между направлениями источников. Из тригонометрических тождеств теоремы косинусов можно получить следующие три уравнения:
d12=a2+b2-2ab cos(α) (2)
d22=b2+c2-2bc cos(β) (3)
(d1+d2)2=a2+c2-2ac cos(α+β) (4)
В уравнениях (2), (3) и (4) неизвестные а, b и с могут быть получены как функции d1 и d2, которые представляют собой расстояния между источниками на поверхности. Расстояние d1 представляет собой расстояние между Tx1 и Tx2, а расстояние d2 представляет собой расстояние между Tx2 и Tx3. Эти расстояния могут быть известны с высокой точностью. Для вычисления положения Rх можно предположить, что Tx1 имеет положение (0, 0). Можно снова применить теорему, чтобы получить:
b2=a2 +c2-2ab cos(δ), (5)
из которого можно получить угол δ. Координаты положения приемника можно определить с помощью x=a cos(δ) и y=a sin(δ).
Фиг.17 иллюстрирует двумерный пример с передатчиками Tx1 и Tx2 на поверхности и приемником Rx под землей, в котором приемник имеет направление профиля. Tx1 и Tx2 разделены расстоянием d1 Точка отсчета, известная для Rx, может быть направлением силы притяжения, которое указывает примерно в сторону центра земли. Направление силы притяжения известно, и можно выстроить плоскость 1706 перпендикулярно направлению силы притяжения. Направления источников можно привязать к плоскости, перпендикулярной силе притяжения. Углы α и β представляют собой направления источников. Затем, предполагая, что плоскость 1706, перпендикулярная направлению силы притяжения, и поверхность земли параллельны друг другу, можно с помощью геометрической теоремы, φ1=β и φ2=α, с двумя известными внутренними углами φ1 и φ2 и длиной d1 можно вывести все стороны и углы треугольника. Таким образом, в данном примере с предоставленным направлением профиля необходимы только два источника для этой полуаналитической формулировки.
Количество источников, необходимых для определения положения под землей, зависит от того, сколько имеется в наличии опорных систем координат. Если сила притяжения дает направление профиля к центру Земли и известна ориентация локального магнитного поля, обеспечивая второе направление профиля, то положение приемника под землей можно определить с помощью только двух источников на поверхности, предполагая информацию только об угловом положении источников без информации о расстоянии. Другие способы реализации изобретения включают применение 3D-моделирования в отношении передатчиков и приемника, без конкретной точки отсчета, способом, аналогичным вышеизложенному способу, связанному с 2D-моделированием, в котором применяют теорему косинусов.
Фиг.18 иллюстрирует трехмерный пример с передатчиками на поверхности и приемником под землей, в котором приемник имеет направление профиля, в соответствии с различными вариантами реализации изобретения. S1, S2 и S3 представляют собой положения на поверхности трех передатчиков. Приемник находится в положении О. Расстояния d1 между S1 и S2, d2 между S2 и S3 и d3 между S1 и S3 точно известны. Можно измерить углы α, β и δ. В соответствии с Фиг.18, выводят следующие уравнения:
d12=a2+b2-2ab cos(α) (6)
d22=b2+c2-2bc cos(β) (7)
d32=a2+c2-2ac cos(δ) (8)
где неизвестные а, b и с могут быть определены. По известным положениям источников и выведенным a, b и c можно определить положение приемника в точке O по этим полуаналитическим формулировкам. Если источник представляет собой триаду и направление дипольного источника известно, тогда имеется больше информации, потому что направление колебания поля источника предоставляет дополнительную информацию. Кроме того, чтобы иметь возможность различать разные источники, каждый источник может использовать другую частоту. Применение большего количества источников удобно тем, что оно может содействовать точности позиционирования.
Имитационные модели могут быть применены к полуаналитическим методам. С помощью системы позиционирования, проиллюстрированной на Фиг.9А, пример имитационного моделирования может быть представлен 2D-полуаналитическими формулировками. В случае этого 2D-примера предположили, что приемник, как известно, находится в одной плоскости с двумя передатчиками. Затем углы α и β, проиллюстрированные на Фиг.17, можно вывести как арктангенс отношения вертикального и горизонтального расстояний от каждого передатчика до приемника. Эти расстояния можно определить с помощью полученных данных от индивидуального передатчика, а не с помощью ранее описанных алгоритмов инверсии. Такой подход может быть реализован путем сопоставления измеренных сигналов с рассчитанными сигналами, аналогичными описанным ранее алгоритмам инверсии. Результаты полуаналитического подхода могут быть более эффективными в тех случаях, когда флуктуации коэффициента усиления приемника и передатчика являются проблемой, или в дисперсионной/преломляющей среде.
В некоторых других применениях, если как передатчик, так и приемник представляют собой триады с известными ориентациями, их можно повернуть таким образом, чтобы получить два диполя, при этом принимаемый сигнал равен нулю. Это возможно только тогда, когда приемник является бесконечно удаленным, что можно отбросить в практических применениях; или когда передающие и приемные диполи расположены параллельно соединяющей их линии, которая обеспечивает данные об угловых размерах. Другие варианты и комбинации вышеуказанных способов реализации изобретения также можно применять для определения данных об угловых размерах.
Фиг.19A-B иллюстрируют результаты моделирования методом Монте-Карло с применением полуаналитического решения для системы позиционирования, проиллюстрированной на Фиг.9. Положение приемника в х-плоскости и z-плоскости определяли с помощью данных об угловых размерах. Фактическая вертикальная глубина изменяется в диапазоне от 100 до 10000 метров с шагами в 100 метров, и 100 повторений имитационных моделей выполнены на каждом шаге для значения SNR, составляющего 50. Кривые 1942 и 1952 показывают среднюю погрешность между положением датчика и имитационными моделями. Кривые 1944 и 1954 показывают плюс одно среднеквадратичное отклонение погрешности от среднего значения. Кривые 1946 и 1956 показывают минус одно среднеквадратичное отклонение погрешности от среднего значения. Результаты чуть менее точны, чем результаты, проиллюстрированные на Фиг.10, поскольку данные об угловых размерах получают при помощи взаимодействия только индивидуального передатчика и индивидуального приемника.
В различных вариантах реализации изобретения способы определения положения в подземном пласте могут включать позиционирование на основании электрического поля. В предшествующих примерах предполагали, что и передатчики, и приемники представляли собой магнитные диполи. Таким образом, приемники измеряли магнитные поля. Если же в приемниках измеряют электрические поля, то могут применять другой подход для определения положения приемника.
Фиг.20 иллюстрирует электрическое поле на приемнике, вследствие магнитного диполя, являющегося перпендикулярным плоскости, в которой расположены приемник и передатчик. Электрическое поле магнитного диполя имеет только окружную (ϕ) составляющую. Таким образом, электрическое поле, E(xrec, yrec, zrec), в приемнике перпендикулярно плоскости, в которой расположены передатчик Тx(x0, y0, z0) и приемник. Таким образом, эту плоскость могут определять по следующей формуле:
nx0(x-x0)+ny0(y-y0)+nz0(z-z0)=0 (9)
В уравнении (9) nx0, ny0 и nz0 представляют собой составляющие х, y и z единичного вектора, имеющего то же направление с помощью электрического поля, и (x0, y0, z0) представляет собой положение передатчика. Если имеются три линейно независимые уравнения для трех разных передатчиков (иными словами, если плоскости, полученные посредством уравнения (9), не являются одними и теми же для двух или более передатчиков), то независимые уравнения могут решать для определения положения приемника, как показано в уравнении (10). Вектор (nxi, nyi, nzi) представляет собой единичный вектор, параллельный электрическому полю в приемнике, произведенному передатчиком i в положении (xi, yi, zi), где i=0, 1, 2.
 (10)
(10)
Для практических применений важно удовлетворить требование автономности в интересующем образце. Например, если все три передатчика расположены на плоской поверхности на расстоянии друг от друга, а приемник не расположен на этой поверхности, то плоскости, полученные с помощью уравнения (9), будут всегда пересекаться в точке, в которой расположен приемник.
В практических приложениях искажения будут влиять на точность результатов. В таких случаях может быть желательным добавить еще информации для повышения точности. Дополнительная информация может включать применение дополнительных передающих источников, каждый из которых имеет известное положение. Что касается этих случаев, матрица единичных векторов может не быть квадратной матрицей. Таким образом, вместо этого в уравнении (10) следует применить псевдо-обратное разложение матрицы. В рамках этого подхода не применяют итеративную инверсию; соответственно, результаты получают гораздо быстрее, чем при инверсионном подходе. Однако ориентация датчика приемника должна быть точно известна посредством применения других средств.
Фиг.21 иллюстрирует моделированную систему для электрического поля на основании системы позиционирования. Эталонная система координат в выражениях (x, y, z), на которой z находится в направлении от поверхности 2104, проиллюстрирована на Фиг.21 с началом координат (0, 0, 0) на проиллюстрированных оси x, оси y и оси z. Система позиционирования в данном примере содержит три передатчика: Tx1, х-направленный магнитный диполь на (1000, 0, 0); Tx2, y-направленный магнитный диполь на (3000, 0, 0); и Tx3, z-направленный магнитный диполь на (2000, -1000, 0). Приемник Rх, триада электрических диполей, находится на (2300, 600, zrec), где zrec представляет собой TVD. Как и прежде, моделирования методом Монте-Карло повторяются 100 раз на каждом шаге глубины, тем временем как TVD изменяется от 100 м до 10000 м, с шагом в 100 м и SNR, составляющим 50. Rx, как предполагают, имеет угол возвышения 70° и азимутальный угол 50°. Пласт, как предполагают, имеет удельное электрическое сопротивление Rf=1 Ом/м, относительную диэлектрическую проницаемость εr=5 и относительную магнитную проницаемость μr=1.
Фиг.22А-С иллюстрируют результаты моделирования методом Монте-Карло с применением электрического поля на основании системы позиционирования, проиллюстрированной на Фиг.21. Результаты моделирования методом Монте-Карло относятся к погрешностям в положении х, положении y и положении z приемника, проиллюстрированного на Фиг.21. Кривые 2242, 2252 и 2262 показывают среднюю погрешность между положением датчика и имитационными моделями. Кривые 2244, 2254 и 2264 показывают плюс одно среднеквадратичное отклонение погрешности от среднего значения. Кривые 2246, 2256 и 2266 показывают минус одно среднеквадратичное отклонение погрешности от среднего значения. Точность не является настолько удовлетворительной, как при инверсионном подходе, но по-прежнему получают разумную аппроксимацию к фактическому положению приемника.
На основании принципа двойственности электрические диполи могут применять в примерах, описанных в данном документе. Например, если передатчики являются электрическими диполями, магнитное поле будет перпендикулярным плоскости, содержащей положения приемника и передатчика вместо электрического поля. Таким образом, описываемый в данном документе способ может быть реализован путем измерения магнитных полей на приемнике.
В различных вариантах реализации изобретения особенности способа определения положения приемника в скважине включают: прием сигналов от приемника в подземном пласте в ответ на сигналы, поступающие из трех или более передающих источников, при этом каждый из трех или более передающих источников расположен в известном положении, при этом по меньшей мере один передающий источник из трех или более передающих источников отделен от устройства и установлен на устройство, отличное по меньшей мере от одного другого передающего источника из трех или более передающих источников; и обработку принимаемых сигналов с помощью процесса инверсии на основании сигналов, поступающих из трех или более передающих источников, с целью определения положения приемника. Обработку сигналов для определения положения приемника могут осуществлять в глубине скважины. Скважинную обработку могут выполнять при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Скважинная обработка может быть расположена с помощью электронных устройств, размещенных на конструкции, на которой размещен приемник, и отделенных от приемника. Скважинная обработка может обеспечивать автоматизированное направленное бурение. В качестве альтернативы, блоком обработки могут управлять на поверхности в ответ на прием сигналов или данных относительно сигналов от приемника.
Особенности способа реализации изобретения могут включать регулировку трех или более передающих источников, включая передающий источник, который содержит токонесущий провод замкнутого контура цепи, при этом токонесущий провод находится в известном положении и токонесущий провод расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Особенности способа реализации изобретения могут включать регулировку трех или более передающих источников, включая передающий источник, который содержит множество токонесущих проводов замкнутого контура цепи, при этом каждый из множества токонесущих проводов находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет; и обработку сигналов на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий. Регулировка трех или более передающих источников может включать регулировку по меньшей мере трех дипольных передатчиков. Регулировка трех или более передающих источников может включать регулировку источника, создающего большое распределение тока на поверхности или вблизи поверхности земли, что создает электромагнитные поля под землей, при этом электромагнитные поля поддаются измерению в приемнике, и при этом большое распределение тока осуществляется в известном положении. Три или более передающих источников включают один или более передающих источников, имеющих надземное положение. Три или более передающих источников могут включать передатчик в скважине. Указанная скважина может отличаться от скважины, в которой расположен приемник, или указанная скважина может быть скважиной, в которой расположен приемник. Три или более передающих источников могут включать не более двух передатчиков в плоскости, содержащей приемник. Регулировка трех или более передающих источников может включать осуществление различных комбинаций этих вариантов реализации устройств с целью регулировки трех или более передающих источников.
Особенности способа реализации изобретения могут включать создание по меньшей мере одного сигнала из создаваемых сигналов из передающего источника на поверхности или вблизи поверхности земли, при этом указанный сигнал имеет низкую частоту для проникновения глубоко под землю таким образом, что указанный сигнал измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины. Способ реализации изобретения может включать управление тремя или более передающих источников последовательно таким образом, что лишь один из трех или более передающих источников работает в определенный период времени. Способ реализации изобретения может включать управление каждым из передающих источников на частоте менее чем около 50 Гц.
Применение процесса инверсии может включать следующие этапы: создание значений сигнала, ожидаемого в приемнике от каждого из передающих источников; создание разности между ожидаемым сигналом и принимаемым сигналом из приемника; выбор в случае разности, меньшей порогового значения, значений координат приемника, при положении приемника, создавшего ожидаемый сигнал в приемнике, для которого разность меньше порогового значения; и создание в случае разности, превышающей пороговое значение, новых значений ожидаемого сигнала в приемнике и определение того, находится ли разность между новыми значениями и принимаемым сигналом от приемника ниже порогового значения. Создание значений ожидаемого сигнала в приемнике может включать применение оценки положения приемника при помощи прямой модели. Создание значений ожидаемого сигнала в приемнике может включать применение оценки положения приемника при помощи таблицы подстановки.
Применение процесса инверсии может включать следующие этапы: создание оценки положения приемника, при этом приемник считают первым приемником; создание оценки каждого положения одного или более других приемников, при этом каждый из одного или более других приемников имеет известное положение относительно первого приемника; создание значений ожидаемых сигналов в первом приемнике и в одном или более других приемников от каждого из передающих источников; создание разности между значениями ожидаемых сигналов и комбинацией принимаемого сигнала в первом приемнике и принимаемых сигналов в одном или более других приемников; выбор в случае разности, меньшей порогового значения, значений координат первого приемника, при положении первого приемника, создавшего ожидаемые сигналы в первом приемнике, для которых разность меньше порогового значения; и создание в случае разности, превышающей пороговое значение, новой оценки положения первого приемника, если процесс инверсии находится в пределах максимальной итерации.
Применение процесса инверсии может включать следующие этапы: создание наборов значений ожидаемого сигнала в приемнике, при этом каждый набор создается из отличной оценки положения приемника; создание разностей между значениями ожидаемого сигнала и принимаемого сигнала от приемника для каждого набора; и выбор оценки, которая минимизирует погрешность в разности между значениями ожидаемого сигнала и принимаемого сигнала от приемника. Создание наборов значений ожидаемых сигналов в приемнике может включать применение прямой модели с каждой из оценок.
В различных вариантах реализации изобретения особенности способа определения положения приемника в скважине включают: прием сигналов от приемника в подземном пласте в ответ на сигналы, поступающие из трех или более передающих источников, при этом каждый из трех или более передающих источников расположен в известном положении, при этом по меньшей мере один передающий источник из трех или более передающих источников отделен от устройства и установлен на устройство, отличное по меньшей мере от одного другого передающего источника из трех или более передающих источников; определение углов по отношению к передатчикам относительно приемника на основании принимаемых сигналов; и определение положения приемника на основании углов и известных положений. Определение углов и определение положения приемника могут осуществлять в скважине. Определение углов и определение положения приемника могут осуществлять при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Скважинная обработка может быть расположена с помощью электронных устройств, размещенных на конструкции, на которой размещен приемник, и отделенных от приемника. Скважинная обработка может обеспечивать автоматизированное направленное бурение. В качестве альтернативы, блоком обработки могут управлять на поверхности в ответ на прием сигналов или данных относительно сигналов от приемника.
Второй способ реализации изобретения может включать регулировку трех или более передающих источников, включая передающий источник, который содержит токонесущий провод замкнутого контура цепи, при этом токонесущий провод находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Особенности второго способа реализации изобретения могут включать регулировку трех или более передающих источников, включая передающий источник, который содержит множество токонесущих проводов, образующих замкнутый контур цепи, при этом каждый из множества токонесущих проводов находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет; и обработку сигналов на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий. Регулировка трех или более передающих источников может включать по меньшей мере три дипольных передатчика. Три или более передающих источников могут включать один или более передающих источников, имеющих надземное положение. Второй способ реализации изобретения может включать создание по меньшей мере одного сигнала из создаваемых сигналов из передающего источника на поверхности или вблизи поверхности земли, при этом указанный сигнал имеет низкую частоту, проникая глубоко под землю таким образом, что указанный сигнал измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины.
Второй способ реализации изобретения может включать использование силы притяжения для обеспечения точки отсчета. Определение положения приемника может включать оценку геометрических тождеств с применением углов и известных положений. Оценка геометрических тождеств может включать применение теоремы косинусов. Второй способ реализации изобретения может включать управление каждым из передатчиков на частоте, отличающейся от частоты других передатчиков из множества передатчиков. Передатчиками могут также управлять последовательно.
В различных вариантах реализации изобретения особенности третьего способа определения скважинного приемника включают: определение электрического поля в приемнике, расположенном в подземном пласте, в ответ на сигналы, поступающие из трех или более магнитных диполей, расположенных в известных положениях таким образом, что существуют по меньшей мере три различные плоскости, определенные соответственно по положению одного из трех или более магнитных диполей и электрического поля в приемнике в связи с соответствующим магнитным диполем; и определение положения приемника на основании известных положений и направления электрического поля. Определение положения приемника могут осуществлять в скважине. Определение положения приемника могут осуществлять при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Скважинная обработка может быть расположена с помощью электронных устройств, размещенных на конструкции, на которой размещен приемник, и отделенных от приемника. Скважинная обработка может обеспечивать автоматизированное направленное бурение. В качестве альтернативы, блоком обработки могут управлять на поверхности в ответ на прием сигналов или данных относительно сигналов от приемника.
В вариантах реализации третьего способа три или более магнитных диполей могут быть расположены на поверхности или вблизи поверхности земли. В варианте реализации изобретения не более двух передатчиков и приемник расположены в одной плоскости.
В различных вариантах реализации изобретения компоненты системы, выполненные с возможностью определять положение в подземном пласте так, как описано в данном документе, или аналогичным образом, могут быть реализованы в комбинациях реализации аппаратного обеспечения и программного обеспечения. Эти реализации могут содержать машиночитаемое запоминающее устройство, содержащее машинно-исполняемые инструкции, такое как машиночитаемое запоминающее устройство, содержащее выполняемые компьютером инструкции, для определения положения в подземном пласте. Выполняемые инструкции могут также включать инструкции для управления одними или более передатчиков с целью генерации сигналов. Выполняемые инструкции могут также включать инструкции для управления одним или более приемников с целью давать сигналы в ответ на сигналы, генерируемые одним или более передатчиков, в соответствии с принципами, изложенными в данном документе. Инструкции могут включать инструкции для передачи данных в блок обработки таким образом, что блок обработки осуществляет один или более процессов для оценки сигналов, данных или сигналов и данных. Кроме того, машиночитаемое запоминающее устройство, в соответствии с данным документом, представляет собой физическое устройство, которое хранит данные, представленные физической структурой в устройстве. Примеры машиночитаемых запоминающих устройств включают, но не ограничиваются этим, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), запоминающее устройство на магнитных дисках, оптическое запоминающее устройство, флэш-память и другие электронные, магнитные и/или оптические запоминающие устройства.
В различных вариантах реализации изобретения особенности варианта реализации машиночитаемого запоминающего устройства могут включать наличие инструкций хранимых на этом устройстве, которые при выполнении машиной дают машине команду выполнять следующие операции: прием сигналов от приемника в подземном пласте в ответ на сигналы, поступающие из трех или более передающих источников, при этом каждый из трех или более передающих источников расположен в известном положении, при этом по меньшей мере один передающий источник из трех или более передающих источников отделен от устройства и установлен на устройство, отличное от по меньшей мере одного другого передающего источника из трех или более передающих источников; и обработку принимаемых сигналов с помощью процесса инверсии на основании сигналов, поступающих из трех или более передающих источников, с целью определения положения приемника. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая передающий источник, который содержит токонесущий провод замкнутого контура цепи, при этом токонесущий провод находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая передающий источник, который содержит множество токонесущих проводов замкнутого контура цепи, при этом каждый из множества токонесущих проводов находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет; и обработки сигналов на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая по меньшей мере три дипольных передатчика. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая регулировку источника, создающего большое распределение тока на поверхности или вблизи поверхности земли, что создает электромагнитные поля под землей, при этом электромагнитные поля поддаются измерению в приемнике, и при этом большое распределение тока осуществляется в известном положении. Три или более передающих источников могут включать не более двух передатчиков в плоскости, содержащей приемник. Три или более передающих источников могут включать передатчик в скважине. Указанная скважина может отличаться от скважины, в которой расположен приемник, или указанная скважина может быть скважиной, в которой расположен приемник. Инструкции по регулировке трех или более передающих источников могут включать осуществление различных комбинаций этих вариантов реализации устройств с целью регулировки трех или более передающих источников.
Указанные инструкции могут включать инструкции для создания по меньшей мере одного сигнала из создаваемых сигналов из передающего источника на поверхности или вблизи поверхности земли, при этом указанный сигнал имеет низкую частоту, чтобы проникать глубоко под землю таким образом, что указанный сигнал измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины. Указанные инструкции могут включать инструкции для управления тремя или более передающих источников последовательно таким образом, что лишь один из трех или более передающих источников работает в определенный период времени. Указанные инструкции могут включать инструкции для управления одним или более передающих источников, имеющих надземное положение. Указанное машиночитаемое запоминающее устройство может содержать инструкции для управления каждым из передатчиков на частоте менее чем около 50 Гц.
В инструкциях, сохраняемых на машиночитаемом запоминающем устройстве, применение процесса инверсии может включать: создание значений сигнала, ожидаемого в приемнике от каждого из передающих источников; создание разности между ожидаемым сигналом и принимаемым сигналом из приемника; выбор в случае разности, меньшей порогового значения, значений координат приемника, при положении приемника, создавшего ожидаемый сигнал в приемнике, для которого разность меньше порогового значения; и создание в случае разности, превышающей пороговое значение, нового значения ожидаемого сигнала в приемнике и определение того, находится ли разность между новыми значениями и принимаемым сигналом от приемника ниже порогового значения. Создание значений ожидаемого сигнала в приемнике может включать применение оценки положения приемника при помощи прямой модели. Создание значений ожидаемого сигнала в приемнике может включать применение оценки положения приемника при помощи таблицы подстановки.
В инструкциях, сохраняемых на машиночитаемом запоминающем устройстве, применение процесса инверсии может включать: создание оценки положения приемника, при этом приемник считают первым приемником; создание оценки каждого положения одного или более других приемников, при этом каждый из одного или более других приемников имеет известное положение относительно первого приемника; создание значений ожидаемых сигналов в первом приемнике и в одном или более других приемников от каждого из передающих источников; создание разности между значениями ожидаемых сигналов и комбинацией принимаемого сигнала в первом приемнике и принимаемых сигналов в одном или более других приемников; выбор в случае разности, меньшей порогового значения, значений координат первого приемника, при положении первого приемника, создавшего ожидаемые сигналы в первом приемнике, для которых разность меньше порогового значения; и создание в случае разности, превышающей пороговое значение, новой оценки положения первого приемника, если процесс инверсии находится в пределах максимальной итерации.
В инструкциях, сохраняемых на машиночитаемом запоминающем устройстве, применение процесса инверсии может включать: создание наборов значений ожидаемого сигнала в приемнике, при этом каждый набор создается из отличной оценки положения приемника; создание разностей между значениями ожидаемого сигнала и принимаемого сигнала от приемника для каждого набора; выбор оценки, которая минимизирует погрешность в разности между значениями ожидаемого сигнала и принимаемого сигнала от приемника. Создание наборов значений ожидаемого сигнала в приемнике может включать применение прямой модели с каждой из оценок.
В различных вариантах реализации изобретения особенности второго варианта реализации машиночитаемого запоминающего устройства могут включать наличие инструкций хранимых на этом устройстве, которые при выполнении машиной дают машине команду выполнять следующие операции: прием сигналов от приемника в подземном пласте в ответ на сигналы, поступающие из трех или более передающих источников, при этом каждый из трех или более передающих источников расположен в известном положении, при этом по меньшей мере один передающий источник из трех или более передающих источников отделен от устройства и установлен на устройство, отличное по меньшей мере от одного другого передающего источника из трех или более передающих источников; определение углов по отношению к передатчикам относительно приемника на основании принимаемых сигналов; и определение положения приемника на основании углов и известных положений. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая передающий источник, который содержит токонесущий провод замкнутого контура цепи, при этом токонесущий провод находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая передающий источник, который содержит множество токонесущих проводов замкнутого контура цепи, при этом каждый из множества токонесущих проводов находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет; и обработки сигналов на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий.
Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая по меньшей мере три дипольных передатчика. Указанные инструкции могут включать инструкции для регулировки трех или более передающих источников, включая передающие источники, имеющие надземное положение. Указанные инструкции могут включать инструкции для создания по меньшей мере одного сигнала из создаваемых сигналов из передающего источника на поверхности или вблизи поверхности земли, при этом указанный сигнал имеет низкую частоту, чтобы проникать глубоко под землю таким образом, что указанный сигнал измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины.
Во втором варианте реализации машинно-читаемое запоминающее устройство может содержать инструкции для выполнения операций, при этом операции для определения положения могут включать оценку геометрических тождеств с помощью углов и известных положений. Оценка геометрических тождеств может включать применение теоремы косинусов. Указанные операции могут включать использование силы притяжения для получения направления профиля. Указанные операции могут включать управление каждым из передатчиков на частоте, отличающейся от остальных частот множества передатчиков. Указанные операции могут включать управление передатчиками последовательно в одночастотном режиме.
В различных вариантах реализации изобретения особенности варианта реализации машиночитаемого запоминающего устройства могут включать наличие инструкций, сохраняемых на нем, которые при выполнении их машиной дают машине команду выполнять следующие операции: определение электрического поля в приемнике, расположенном в подземном пласте, в ответ на сигналы, поступающие из трех или более магнитных диполей, расположенных в известных положениях таким образом, что существуют по меньшей мере три различные плоскости, определенные соответственно по положению одного из трех или более магнитных диполей и электрического поля в приемнике в связи с соответствующим магнитным диполем; и определение положения приемника на основании известных положений и направления электрического поля. Три или более магнитных диполей могут быть расположены на поверхности или вблизи поверхности земли. Три или более магнитных диполей могут быть выполнены с не более чем двумя передатчиками и приемником на плоскости.
В различных вариантах реализации изобретения вариант реализации типовой системы может содержать: три или более передающих источников, при этом каждый из источников расположен в известном положении, при этом по меньшей мере один передающий источник из трех или более передающих источников отделен от устройства и установлен на устройство, отличное по меньшей мере от одного другого передающего источника из трех или более передающих источников; блок регулирования, выполненный с возможностью регулировать образование сигналов тремя или более передающих источников; приемник в подземном пласте, при этом приемник выполнен с возможностью принимать сигналы в ответ на образование сигналов из трех или более передающих источников; и блок обработки, выполненный с возможностью обрабатывать принимаемые сигналы с помощью процесса инверсии на основании сигналов, поступающих из трех или более передающих источников, с целью определения положения приемника. Блок обработки может быть расположен в глубине скважины. Блок обработки может быть реализован при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Блок обработки может быть реализован при помощи электронных устройств, размещенных на устройстве, на котором размещен приемник, и отделен от приемника. Блок обработки может быть расположен в глубине скважины, что может обеспечить автоматизированное направленное бурение. В качестве альтернативы, блок обработки может располагаться на поверхности, отвечая на прием сигналов или данных относительно сигналов от приемника.
Три или более передающих источников могут включать передающий источник, который содержит токонесущий провод замкнутого контура цепи, при этом токонесущий провод находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Три или более передающих источников могут включать передающий источник, который содержит множество токонесущих проводов замкнутого контура цепи, при этом каждый из множества токонесущих проводов находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет; и блок обработки выполнен с возможностью обрабатывать сигналы на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий. Три или более передающих источников могут включать источник, выполненный с возможностью создавать большое распределение тока на поверхности или вблизи поверхности земли, что создает электромагнитные поля под землей, при этом электромагнитные поля поддаются измерению в приемнике, и при этом большое распределение тока осуществляют в известном положении. Три или более передающих источников могут включать один или более передающих источников, имеющих надземное положение. Три или более передающих источников могут включать передатчик в скважине. Указанная скважина может отличаться от скважины, в которой расположен приемник, или указанная скважина может быть скважиной, в которой расположен приемник. Три или более передающих источников могут включать не более двух передатчиков в плоскости, содержащей приемник. Три или более передающих источников могут быть выполнены с различными комбинациями этих типовых вариантов реализации трех или более передающих источников.
Блок регулирования может быть сконструирован с возможностью создания по меньшей мере одного сигнала из создаваемых сигналов из передающего источника на поверхности или вблизи поверхности земли, при этом указанный сигнал имеет низкую частоту, чтобы проникать глубоко под землю таким образом, что указанный сигнал измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины. Блок регулирования может быть сконструирован с возможностью управления тремя или более передающих источников последовательно таким образом, что лишь один из трех или более передающих источников работает в определенный период времени. Блок регулирования может быть выполнен с возможностью управления каждым из передающих источников на частоте менее чем около 50 Гц.
Блок обработки может быть скомпонован с возможностью применения процесса инверсии, который включает блок обработки, выполненный с возможностью: создания значений сигнала, ожидаемого в приемнике от каждого из передающих источников; создания разности между ожидаемым сигналом и принимаемым сигналом из приемника; выбора в случае разности, меньшей порогового значения, значений координат приемника, при положении приемника, создавшего ожидаемый сигнал в приемнике, для которого разность меньше порогового значения; и создания в случае разности, превышающей пороговое значение, новых значений ожидаемого сигнала в приемнике и определения того, находится ли разность между новыми значениями и принимаемым сигналом от приемника ниже порогового значения. Блок обработки может быть структурирован так, чтобы быть выполненным с возможностью оценивать положение приемника посредством прямой модели. Блок обработки может быть сконструирован так, чтобы быть выполненным с возможностью оценивать положение приемника посредством таблицы подстановки.
Блок обработки может быть скомпонован с возможностью применения процесса инверсии, который включает блок обработки, выполненный с возможностью: создания оценки положения приемника, при этом приемник считают первым приемником; создания оценки каждого положения одного или более других приемников, при этом каждый из одного или более других приемников имеет известное положение относительно первого приемника; создания значений ожидаемых сигналов в первом приемнике и в одном или более других приемников от каждого из передающих источников; создания разности между значениями ожидаемых сигналов и комбинацией принимаемого сигнала в первом приемнике и принимаемых сигналов в одном или более других приемников; выбора в случае разности, меньшей порогового значения, значений координат первого приемника, при положении первого приемника, создавшего ожидаемые сигналы в первом приемнике, для которых разность меньше порогового значения; и создания в случае разности, превышающей пороговое значение, новой оценки положения первого приемника, если процесс инверсии находится в пределах максимальной итерации.
Блок обработки может быть скомпонован с возможностью применения процесса инверсии, который включает блок обработки, выполненный с возможностью: создания наборов значений ожидаемого сигнала в приемнике, при этом каждый набор создается из отличной оценки положения приемника; создания разностей между значениями ожидаемого сигнала и принимаемого сигнала от приемника для каждого набора; и выбора оценки, которая минимизирует погрешность в разности между значениями ожидаемого сигнала и принимаемого сигнала от приемника. Блок обработки может быть сконструирован так, чтобы быть выполненным с возможностью использовать прямую модель при каждой из оценок.
В различных вариантах реализации изобретения второй пример системы может содержать: три или более передающих источников, при этом каждый из источников расположен в известном положении, при этом по меньшей мере один передающий источник из трех или более передающих источников отделен от устройства и установлен на устройство, отличное по меньшей мере от одного другого передающего источника из трех или более передающих источников; блок регулирования, выполненный с возможностью регулировать образование сигналов тремя или более передающих источников; приемник в подземном пласте, при этом приемник выполнен с возможностью принимать сигналы в ответ на образование сигналов из трех или более передающих источников; блок обработки, выполненный с возможностью определения углов по отношению к передатчикам относительно приемника на основании принятых сигналов и определения положения приемника на основании углов и известных положений. Блок обработки может быть расположен в глубине скважины. Блок обработки может быть реализован при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Блок обработки может быть реализован при помощи электронных устройств, размещенных на устройстве, на котором размещен приемник, и отделен от приемника. Блок обработки может быть расположен в глубине скважины, что может обеспечить автоматизированное направленное бурение. В качестве альтернативы, блок обработки может располагаться на поверхности, отвечая на прием сигналов или данных относительно сигналов от приемника.
Во втором варианте реализации типовой системы три или более передающих источников могут включать передающий источник, который содержит токонесущий провод замкнутого контура цепи, при этом токонесущий провод находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет. Три или более передающих источников могут включать передающий источник, который содержит множество токонесущих проводов замкнутого контура цепи, при этом каждый из множества токонесущих проводов находится в известном положении и расположен вдоль прямолинейной траектории таким образом, что сигналы, принимаемые в приемнике из замкнутого контура, которые поступают из частей замкнутого контура, следующих траектории, отличной от прямолинейных траекторий, не принимаются в расчет; и блок обработки выполнен с возможностью обрабатывать сигналы на основании модели множества токонесущих проводов и их соответствующих прямолинейных траекторий. Три или более передающих источников могут включать по меньшей мере три дипольных передатчика. Три или более передающих источников могут включать один или более передающих источников, имеющих надземное положение.
Блок регулирования может быть сконструирован с возможностью создания по меньшей мере одного сигнала из создаваемых сигналов из передающего источника на поверхности или вблизи поверхности земли, при этом указанный сигнал имеет низкую частоту, чтобы проникать глубоко под землю таким образом, что указанный сигнал измеряют в подземной массе, простирающейся на расстояние от сотни футов до тысяч футов в глубину и от сотни футов до тысяч футов поперек глубины. Блок регулирования может быть выполнен с возможностью управлять каждым из передатчиков на частоте, отличающейся от частоты других передатчиков из множества передатчиков. Передатчиками могут также управлять последовательно.
Во втором варианте реализации типовой системы блок обработки может быть выполнен с возможностью оценки геометрических тождеств с применением углов и известных положений. Блок обработки может быть выполнен с возможностью применять теорему косинусов для оценки геометрических тождеств. Блок обработки может быть сконструирован так, чтобы работать с использованием гравитации для обеспечения направления профиля.
В различных вариантах реализации изобретения вариант реализации третьей типовой системы может содержать: приемник, расположенный в подземном пласте; три или более магнитных диполей, находящихся в известных положениях таким образом, что существуют по меньшей мере три различные плоскости, определенные соответственно по положению одного из трех или более магнитных диполей и электрического поля в приемнике в связи с соответствующим магнитным диполем; блок регулирования, выполненный с возможностью регулировать создание сигналов тремя или более магнитных диполей; и блок обработки, выполненный с возможностью определять электрическое поле в приемнике в ответ на создание сигналов и определять положение приемника на основании известных положений и направления электрического поля. Блок обработки может быть расположен в глубине скважины. Блок обработки может быть реализован при помощи электронных устройств, интегрированных с приемником, при этом информация об известных положениях передающих датчиков хранится на электронных устройствах вместе с инструкциями для обработки сигналов. Блок обработки может быть реализован при помощи электронных устройств, размещенных на устройстве, на котором размещен приемник, и отделен от приемника. Блок обработки может быть расположен в глубине скважины, что может обеспечить автоматизированное направленное бурение. В качестве альтернативы, блок обработки может располагаться на поверхности, отвечая на прием сигналов или данных относительно сигналов от приемника.
В третьем варианте реализации типовой системы три или более магнитных диполей расположены на поверхности или вблизи поверхности земли. В варианте реализации изобретения схема расположения может содержать не более двух магнитных диполей и приемник в одной плоскости.
Перестановки особенностей способов, описанных в данном документе, могут быть реализованы среди различных способов реализации изобретения. Перестановки особенностей машиночитаемых запоминающих устройств, описанных в данном документе, могут быть реализованы среди различных машиночитаемых запоминающих устройств. Перестановки особенностей систем, описанных в данном документе, могут быть реализованы среди различных систем.
Фиг.23 иллюстрирует блок-схему устройств типового варианта реализации системы 2300, выполненной с возможностью определять положение в подземном пласте. Система 2300 сконфигурирована с одним или более передающих датчиков, расположенных в известных положениях, и одним или более приемников, расположенных в подземном пласте. Система 2300 содержит схему расположения передающих датчиков 2312 и приемных датчиков 2310, которая может быть реализована способом, аналогичным или идентичным схемам расположения датчиков, обсуждаемых в данном документе. Система 2300 может быть выполнена с возможностью управления в соответствии с принципами данного документа.
Система 2300 может содержать контроллер 2325, запоминающее устройство 2330, электронное устройство 2365 и блок связи 2335. Контроллер 2325, запоминающее устройство 2330 и блок связи 2335 могут быть выполнены с возможностью функционировать как блок регулирования и блок обработки с целью регулировать работу схемы расположения передающих датчиков 2312 и приемных датчиков 2310 и выполнять одну или более операций обработки поступивших сигналов для определения положения одного или более приемных датчиков 2310 с помощью способа, аналогичного или идентичного установленным схемам, описанным в данном документе. Такой блок обработки может быть реализован в виде блока обработки 2320, который может быть выполнен в виде одного блока или в распределенном виде между компонентами системы 2300, включая электронное устройство 2365. Контроллер 2325 и запоминающее устройство 2330 могут работать с целью регулировать включение датчиков передатчика 2312 и выбор датчиков приемника 2310 и управлять схемами обработки в соответствии с процедурами измерения и обработкой сигналов, описанными в данном документе. Система 2300 может быть сконструирована так, чтобы функционировать аналогично или идентично конструкциям, соединенными с передающими схемами расположения и способами обработки сигнала или сигналов от приемного блока, положение которого может быть определено с помощью процесса обработки.
Блок связи 2335 может содержать скважинные средства связи для соответствующим образом расположенных датчиков. Такие скважинные средства связи могут включать систему телеметрии. Блок связи 2335 может использовать комбинации проводных коммуникационных технологий и беспроводных технологий на частотах, которые не мешают текущим измерениям. Блок связи 2335 может содержать интерфейсы для связи с передающими датчиками, распределенными по обширной области.
Система 2300 может содержать сеть 2327, при этом сеть 2327 выполнена с возможностью функционировать посредством сети, обеспечивающей электрическую проводимость между подсистемами системы 2300, распределенными по обширной области, включая расположенные на поверхности передатчики, подземные передатчики и приемники в подземных пластах. Расположенные на поверхности передатчики и подземные передатчики могут находиться в известных положениях, имея связь с одним или более приемников для подачи сигналов на блок обработки с целью найти положение одного или более приемников. Сеть 2327 может содержать адресную шину, шину передачи данных и шину управления, каждая из которых независимо сконфигурирована или имеет интегрированный формат. Сеть 2327 может быть реализована с применением ряда различных коммуникационных сред, что обеспечивает регулирование и управление компонентами и подсистемами системы 2300, которые могут быть распределены по обширной области. Использование сети 2327 могут регулировать при помощи контроллера 2325.
В различных вариантах реализации изобретения периферийные устройства 2345 могут включать дополнительные запоминающие устройства и/или другие управляющие устройства, которые могут работать совместно с контроллером 2325 и/или запоминающим устройством 2330. В варианте реализации изобретения контроллер 2325 реализован в виде процессора или группы процессоров, которые могут работать самостоятельно в зависимости от назначенной функции. Периферийные устройства 2345 могут быть скомпонованы с одним или более дисплеев 2355 в виде распределенного компонента на поверхности, который может быть применен с инструкциями, сохраняющимися в запоминающем устройстве 2330, с целью реализации пользовательского интерфейса для контроля за работой системы 2300 и/или компонентов, распределенных внутри системы 2300. Указанный пользовательский интерфейс могут применять для ввода значений рабочих параметров таким образом, что система 2300 может работать автономно, по существу, без вмешательства пользователя.
Хотя в данном документе проиллюстрированы и описаны конкретные варианты реализации изобретения, специалисты в данной области техники поймут, что любую схему расположения, которая рассчитана на достижение той же цели, могут применять вместо конкретных проиллюстрированных вариантов реализации изобретения. В различных вариантах реализации изобретения применяют перестановки и/или комбинации вариантов реализации изобретения, описанных в данном документе. Следует понимать, что приведенное выше описание имеет иллюстративный, а не ограничительный характер и что в данном документе фразеологию или терминологию употребляют с целью описания. Комбинации вышеизложенных вариантов реализации изобретения и других вариантов реализации изобретения будут очевидны для специалистов в данной области техники при исследовании вышеизложенного описания.
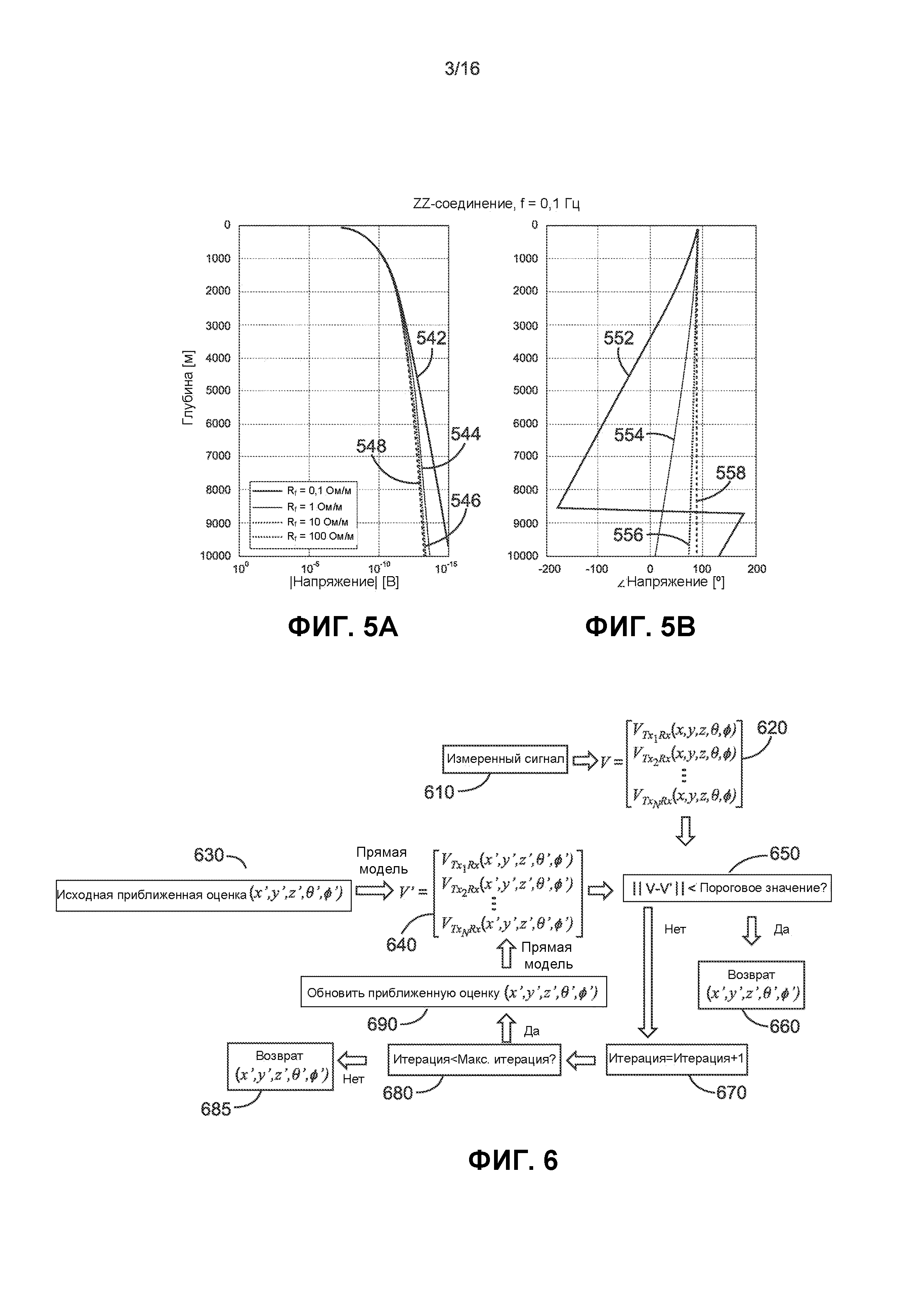
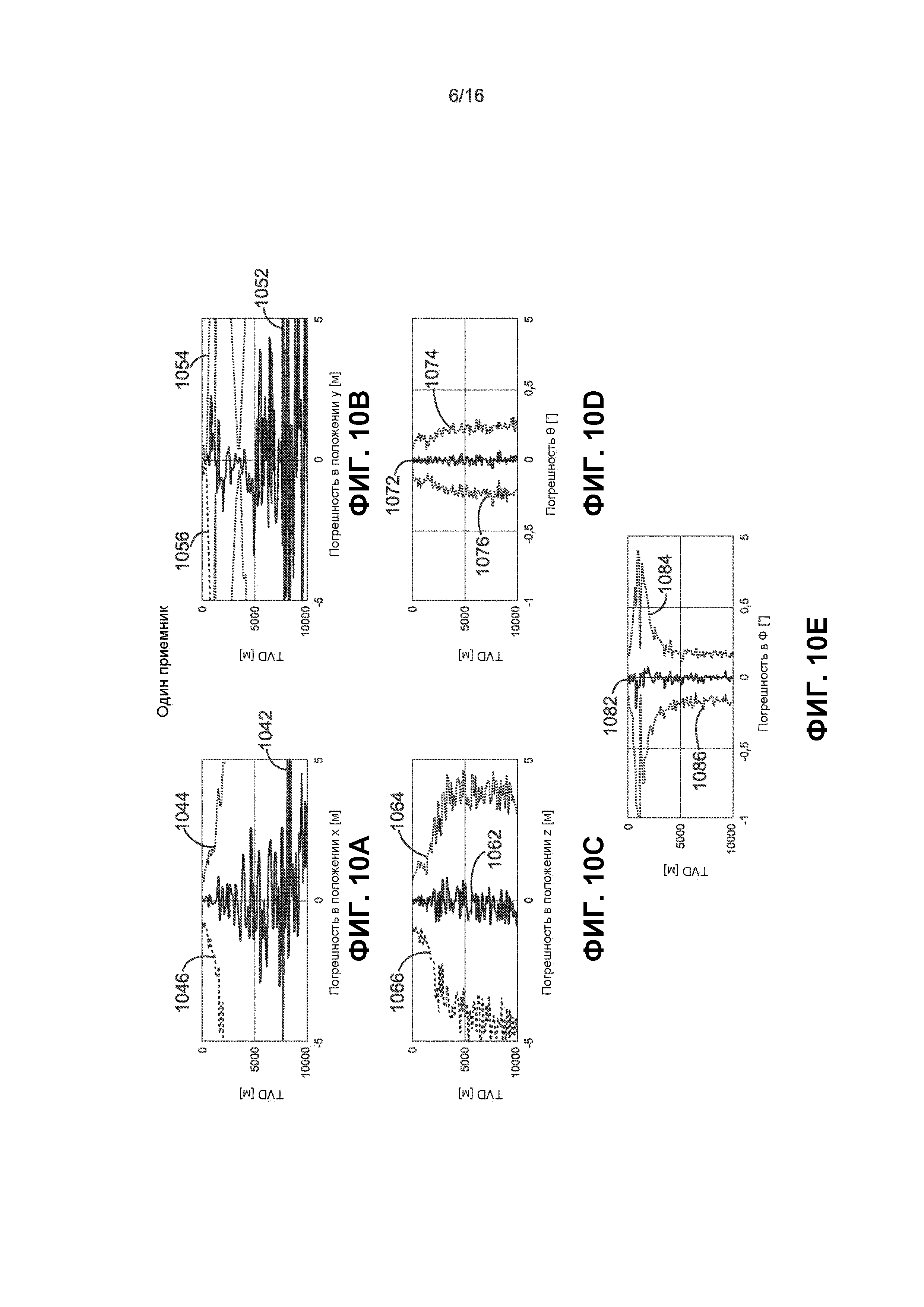
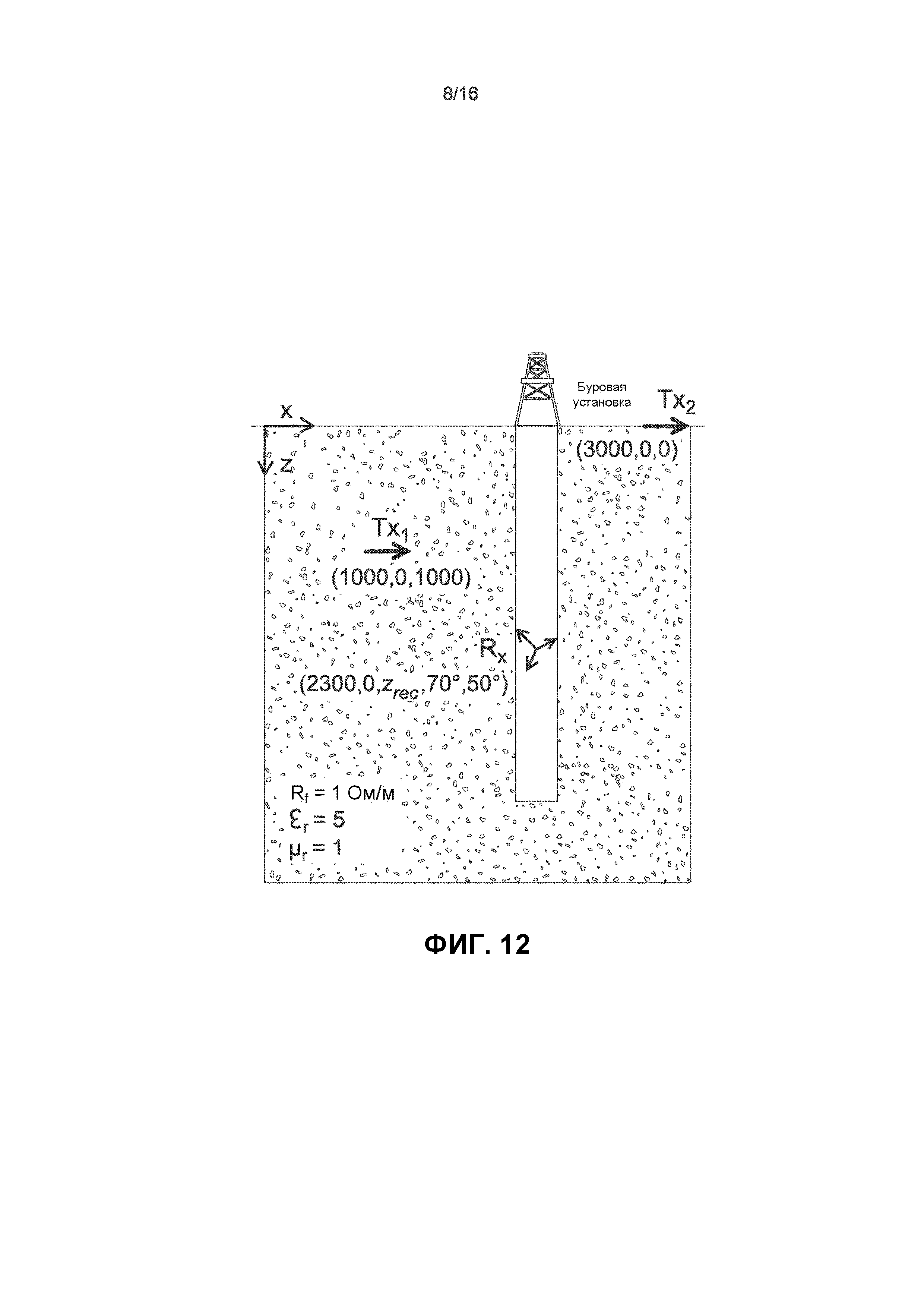
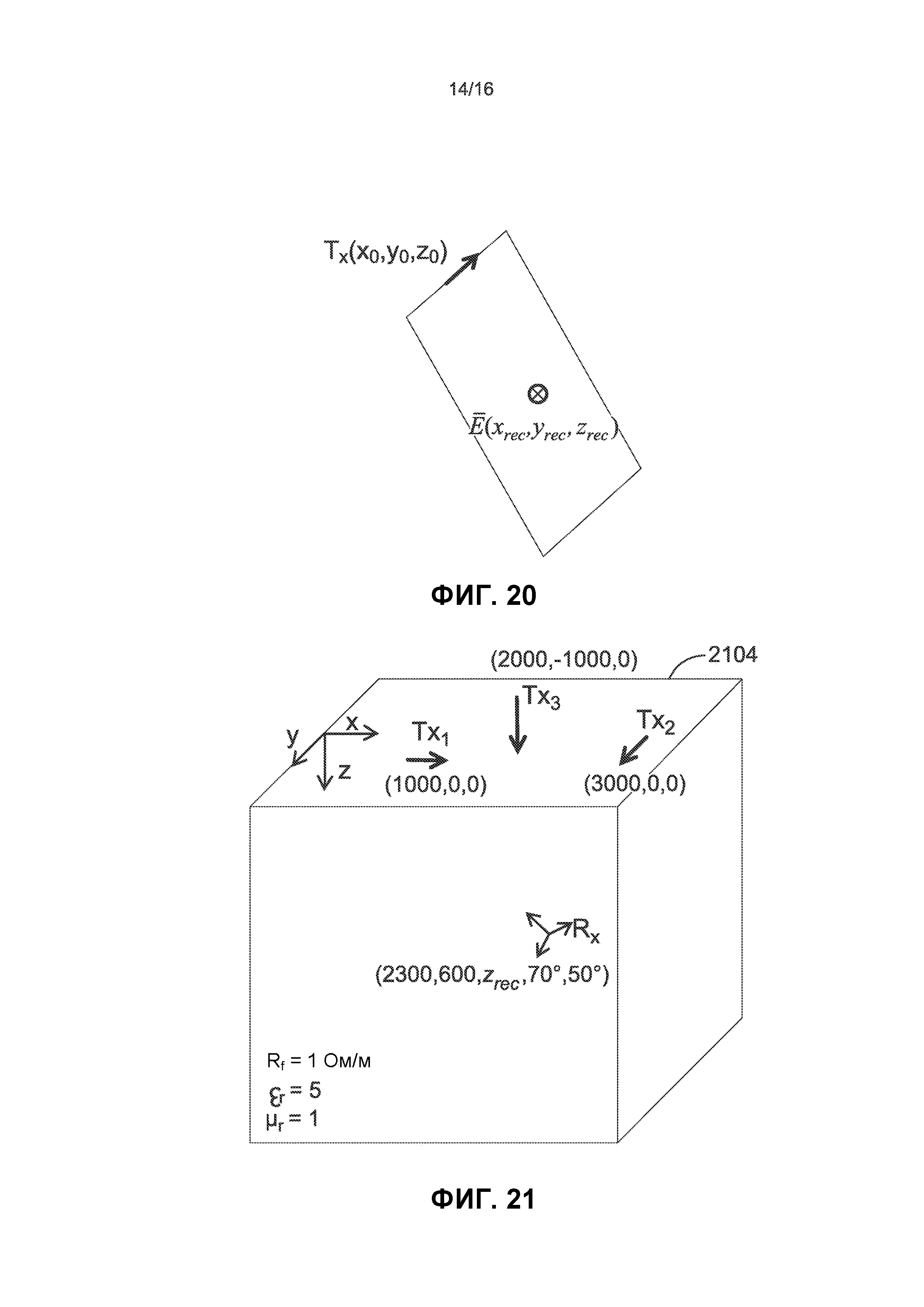
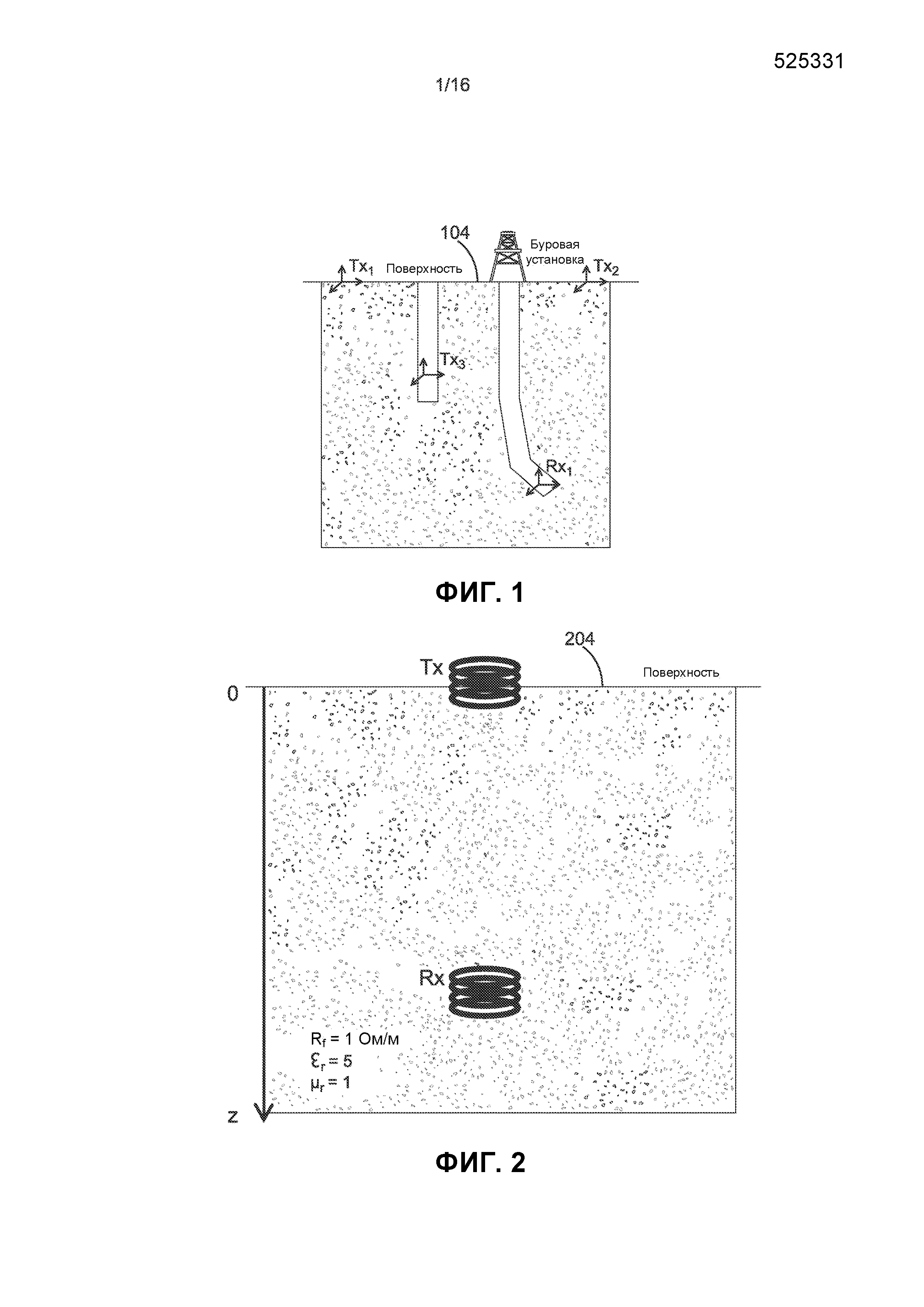
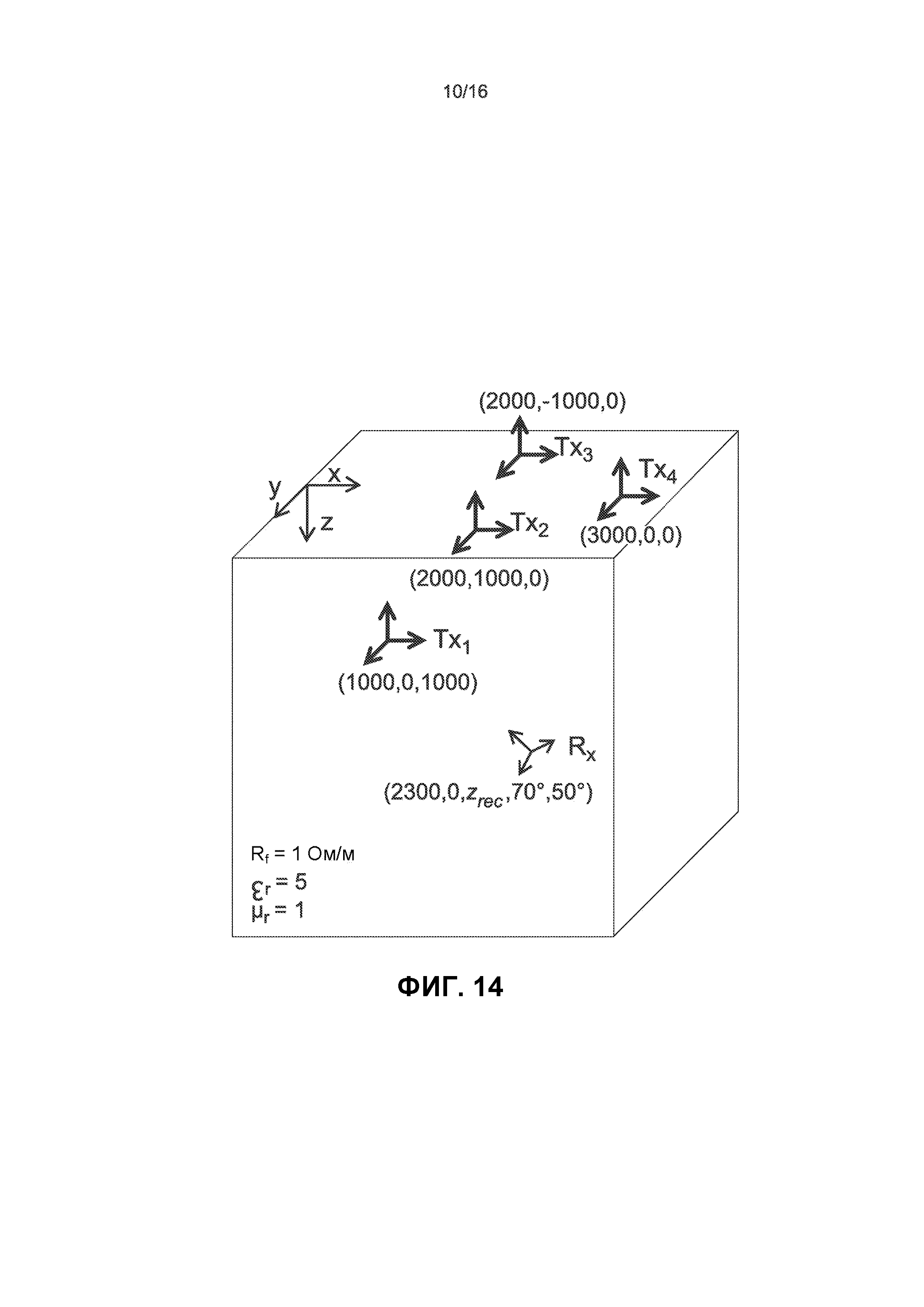
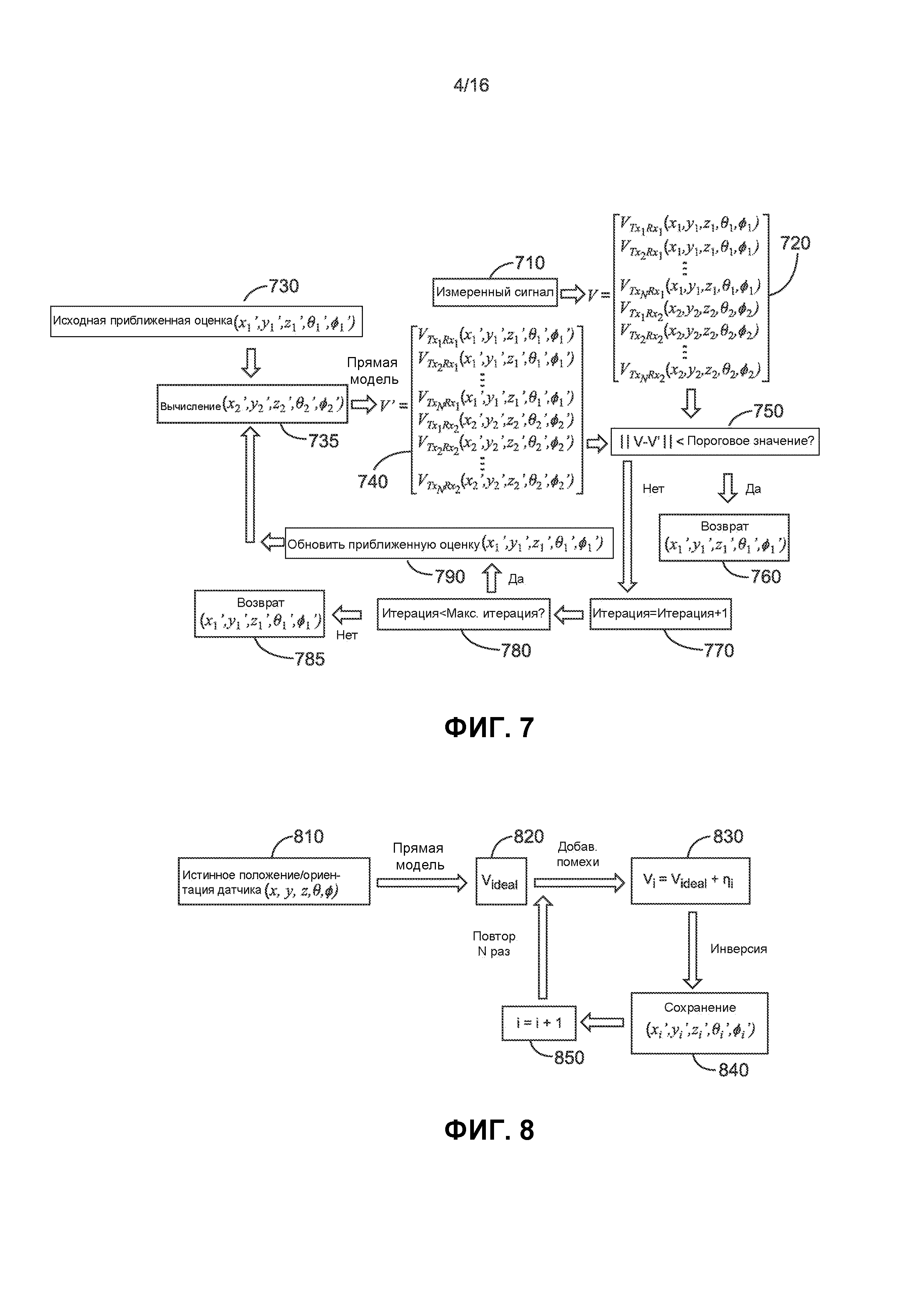
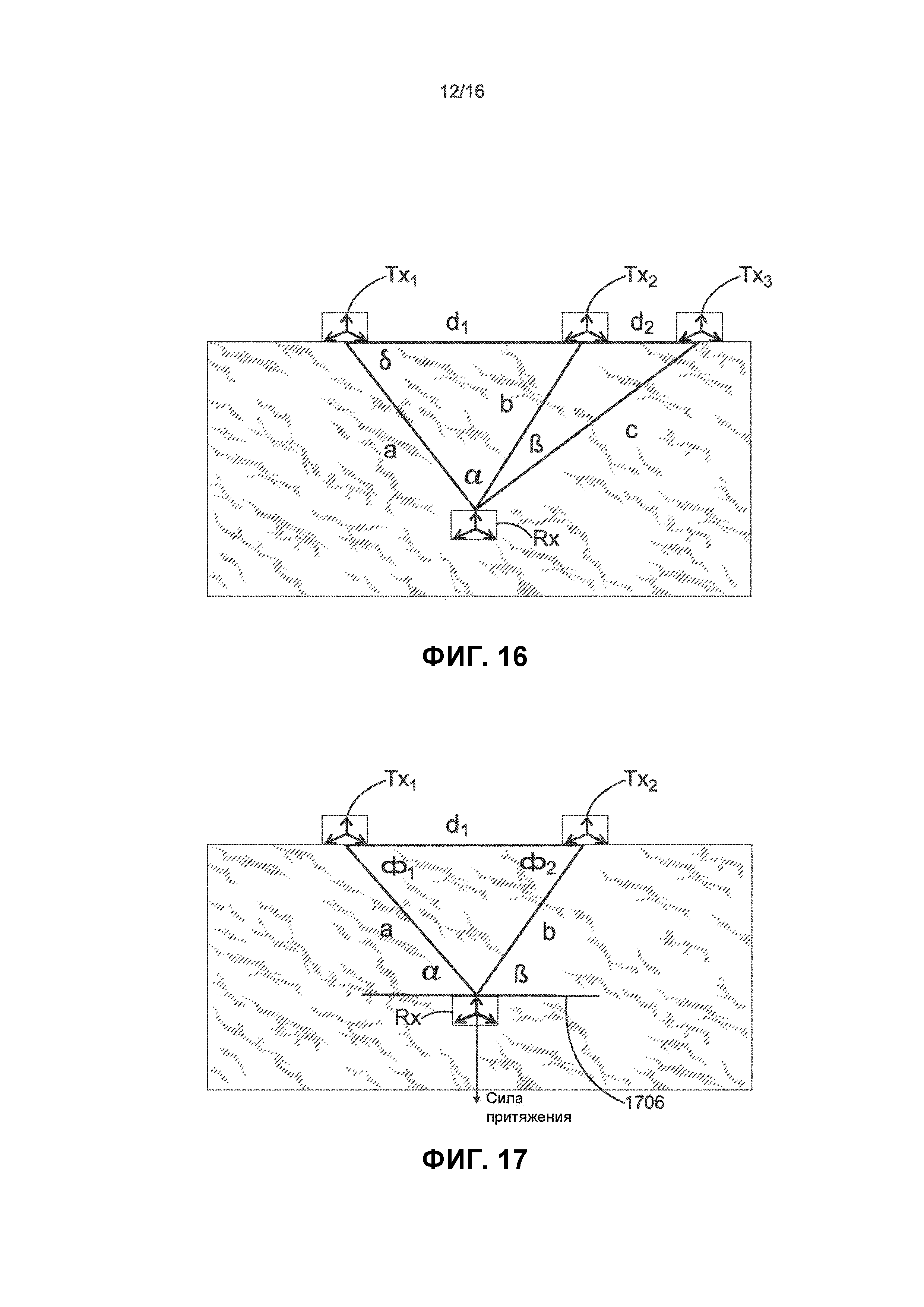
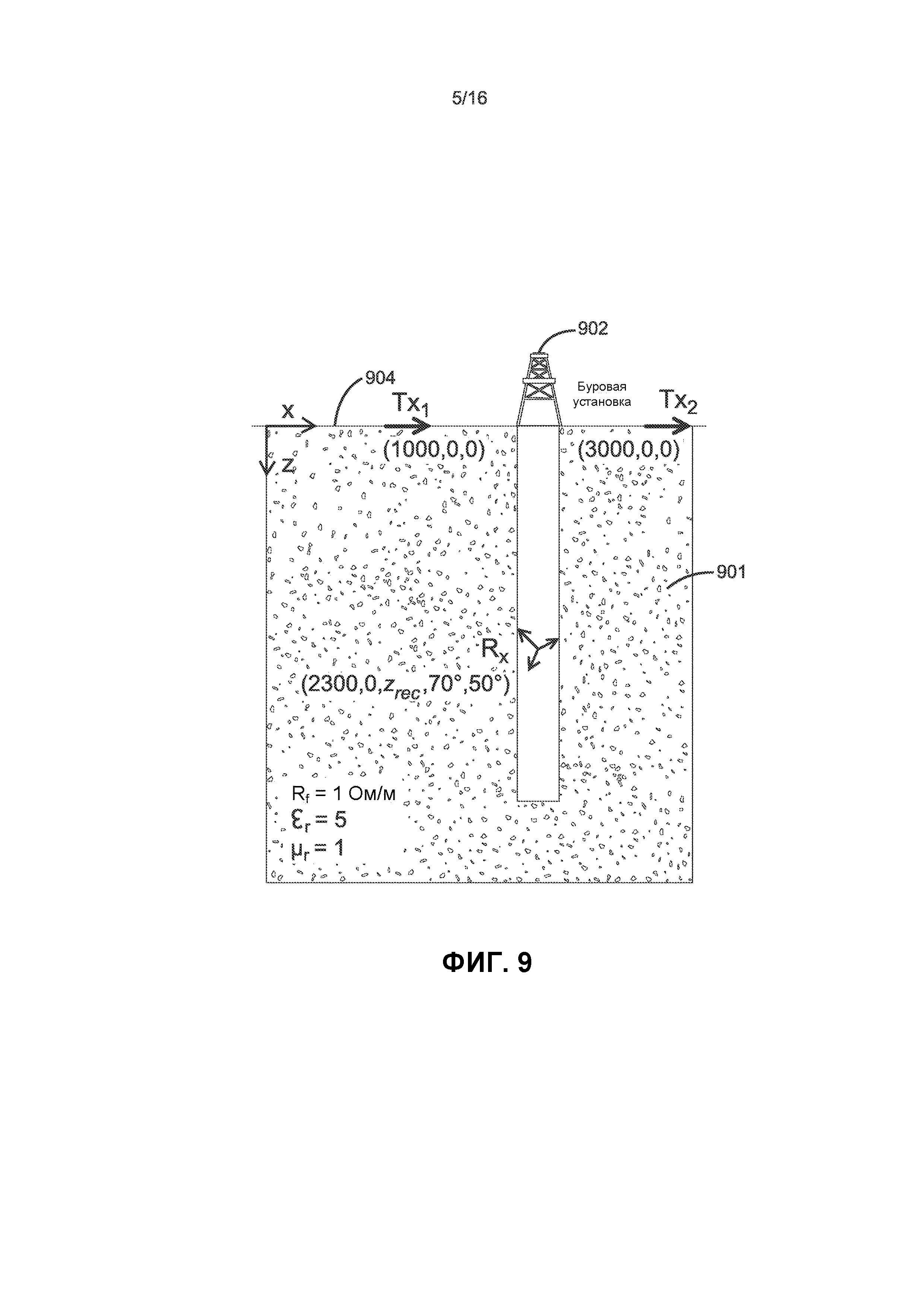
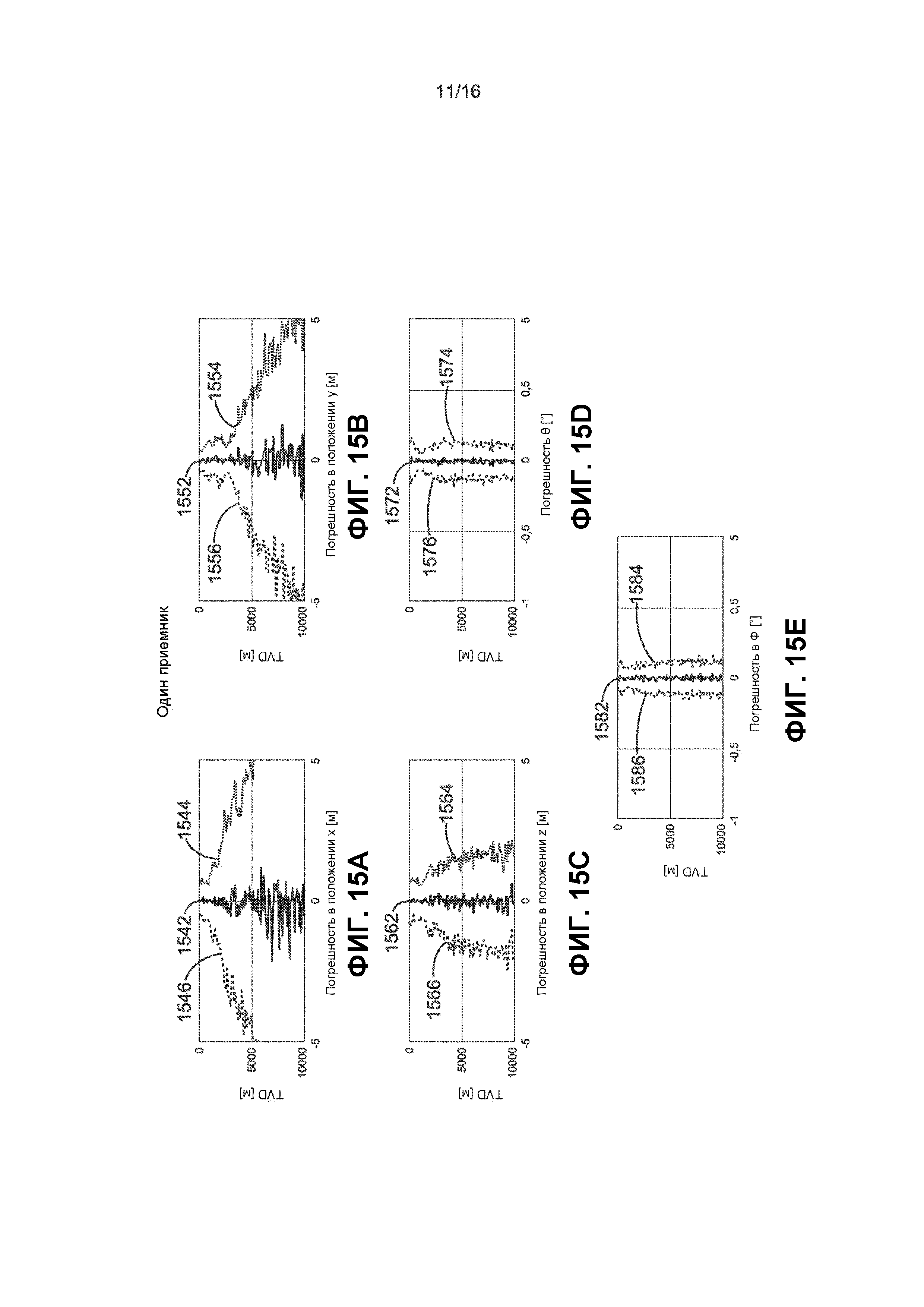
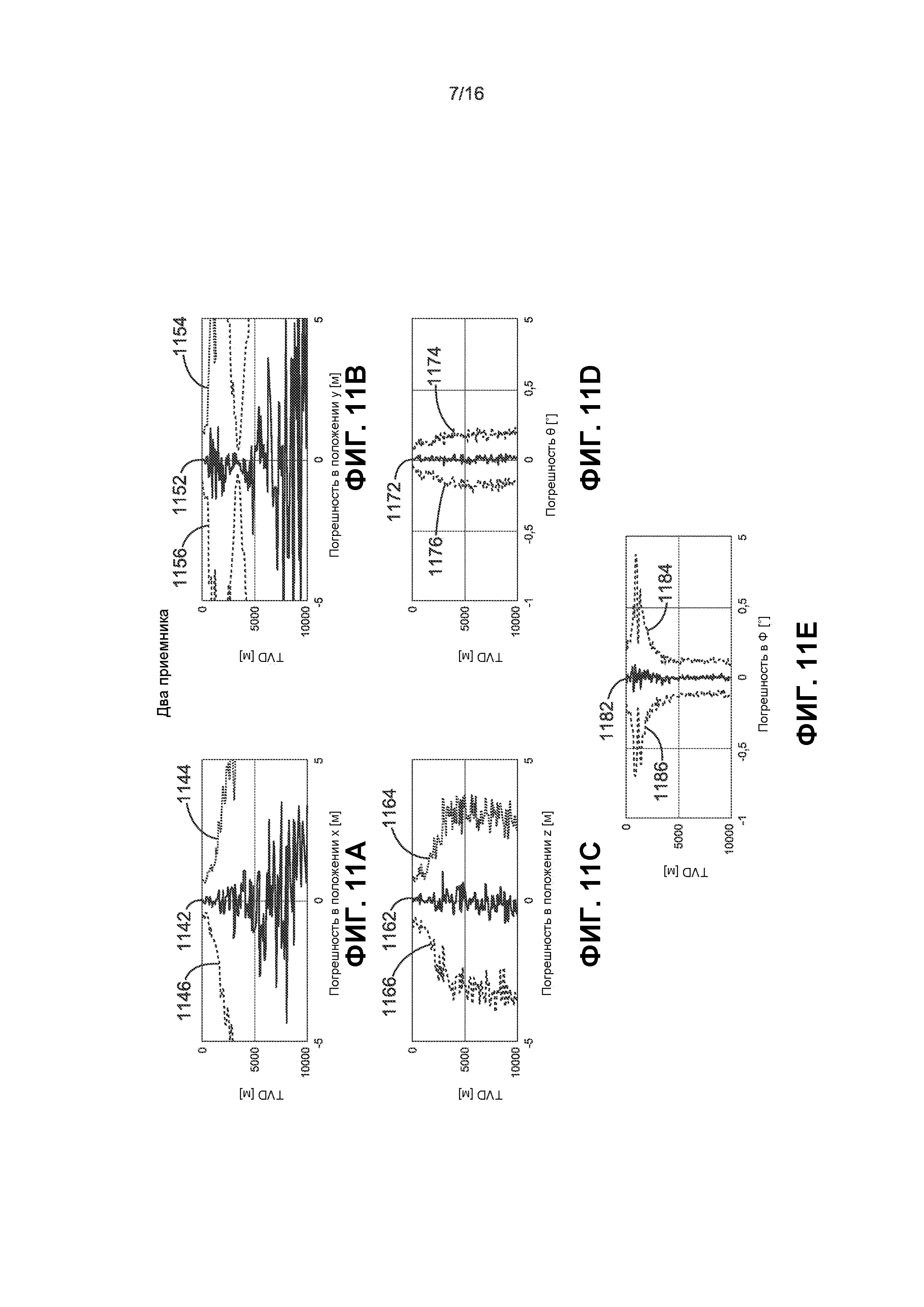
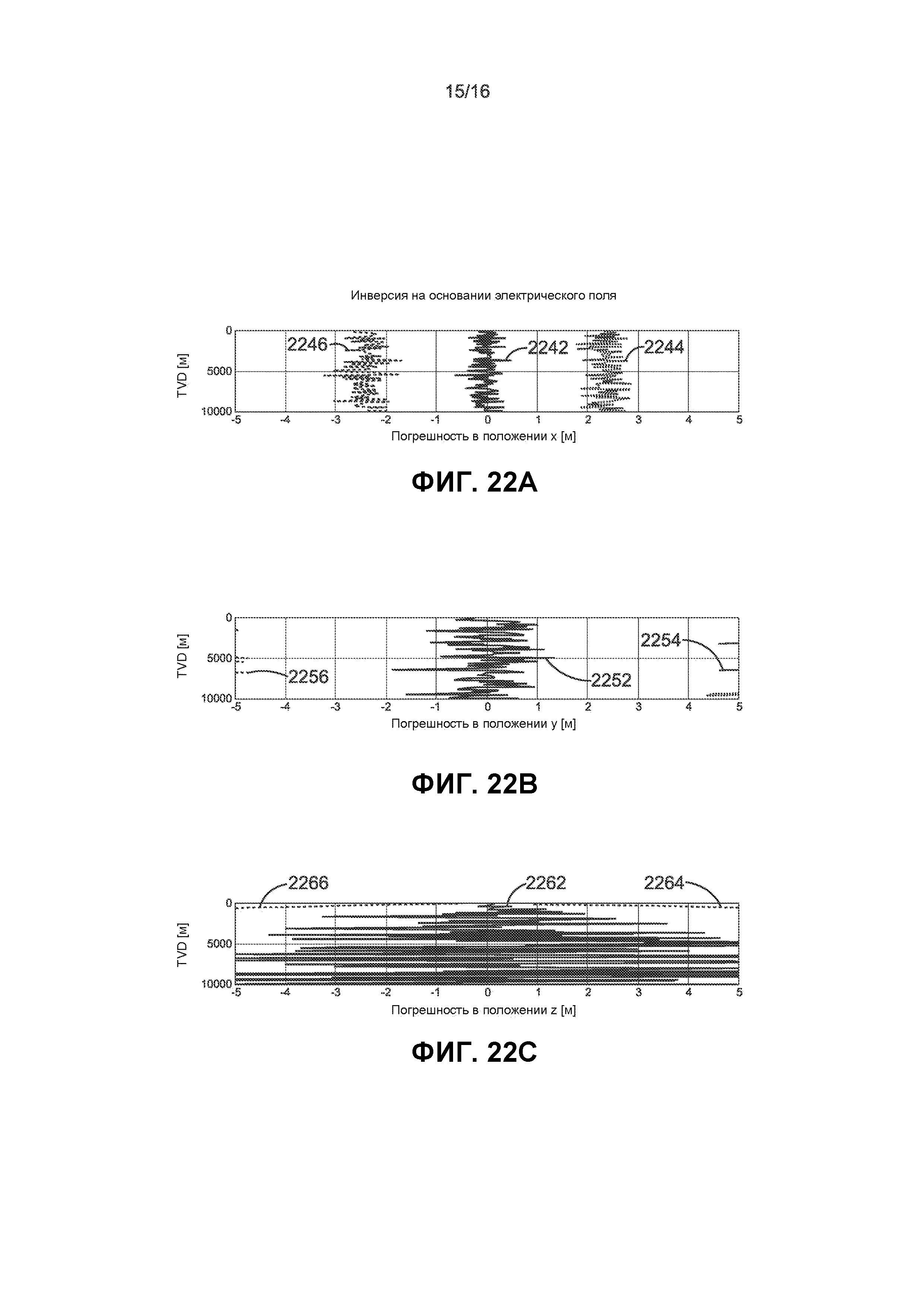
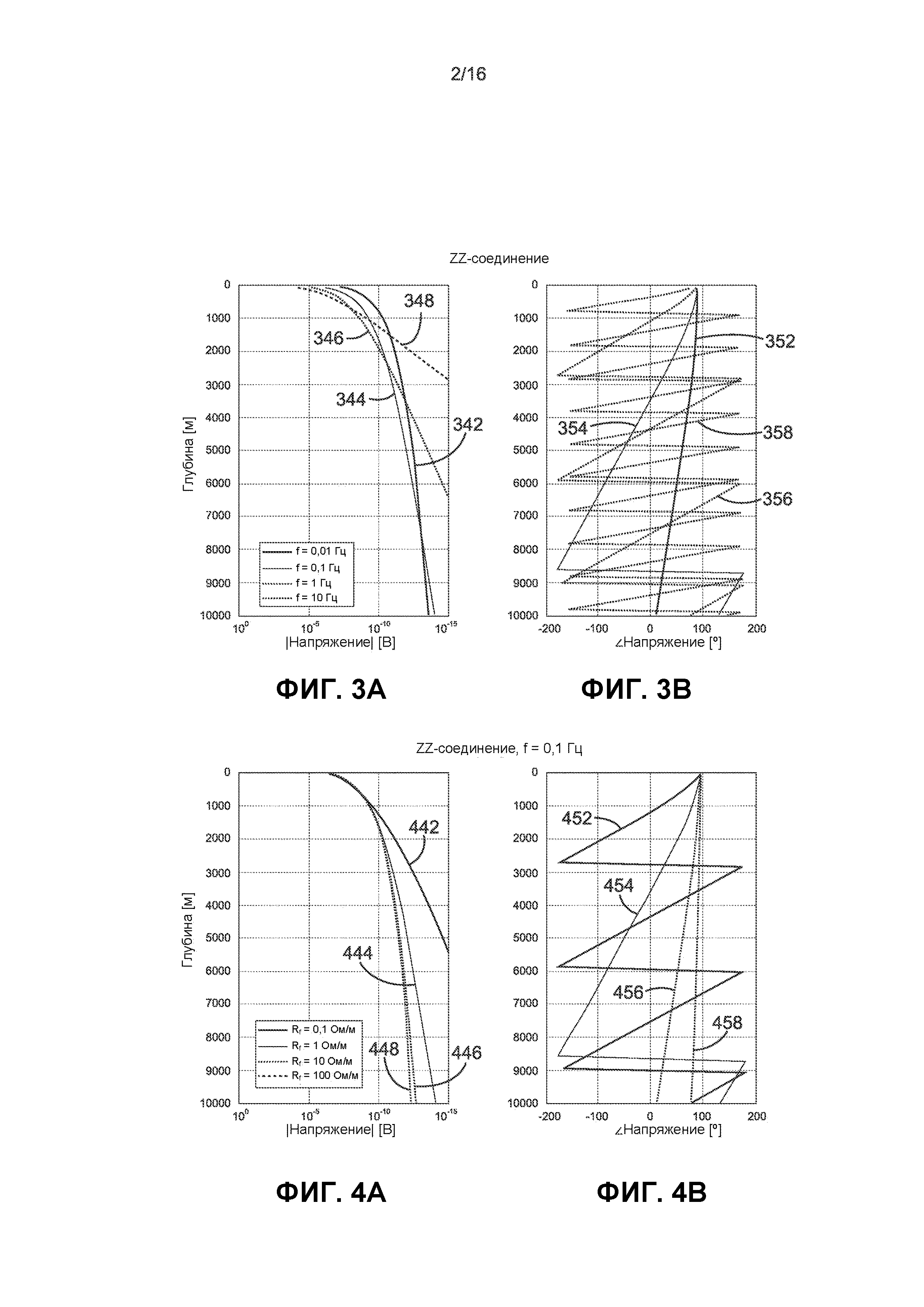
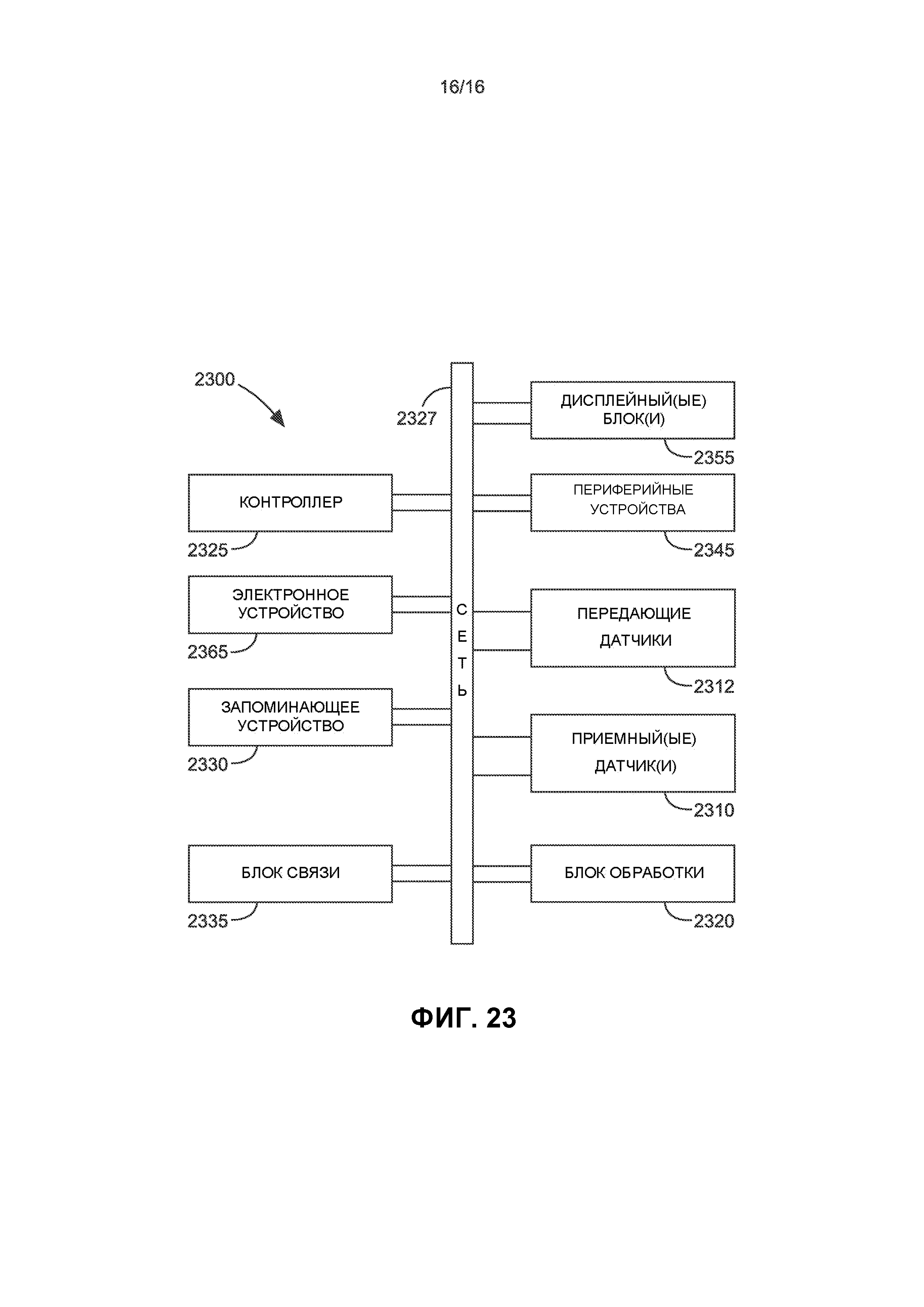
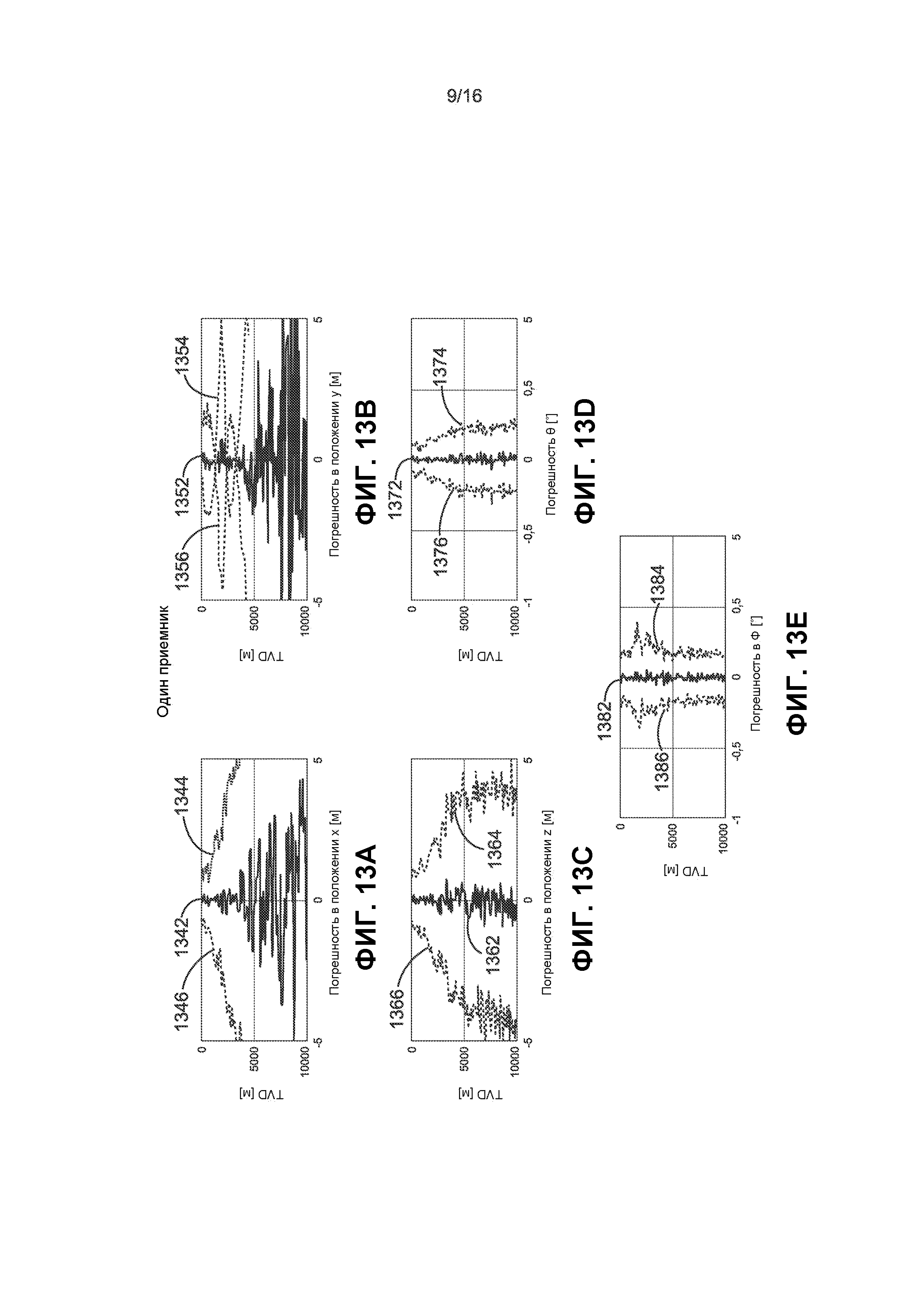
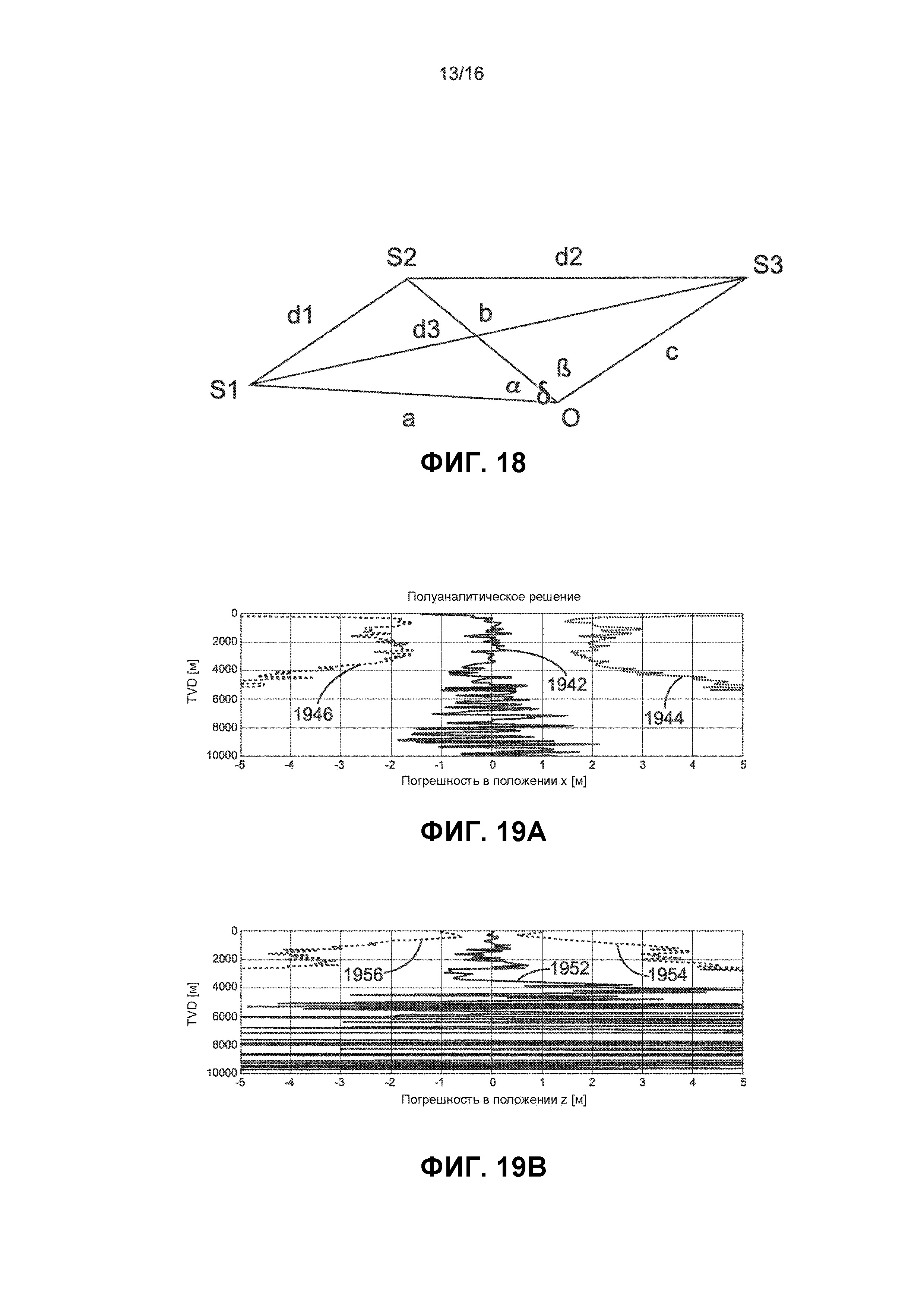
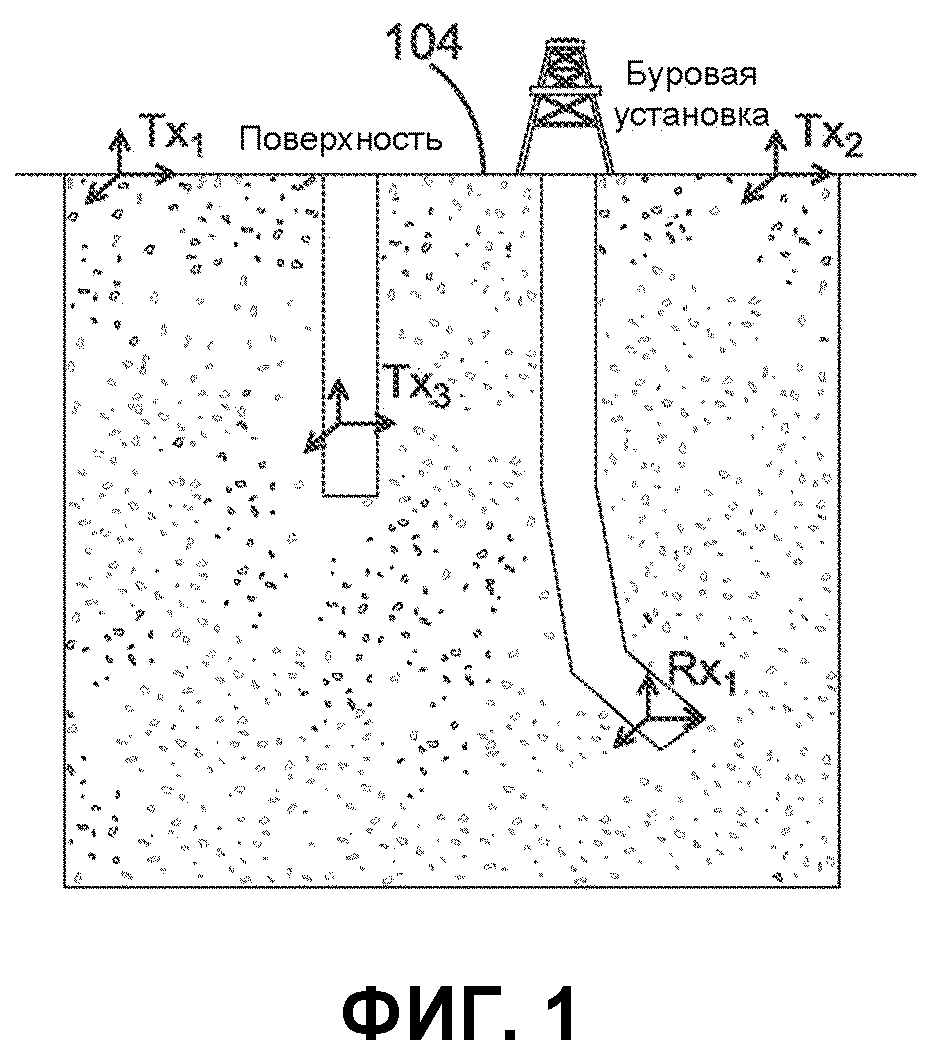
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости

