Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к моторному транспортному средству, содержащему двигатель внутреннего сгорания и, в частности, к моторному транспортному средству, содержащему систему для управления работой двигателя на основании рабочего состояния средства содействия доступу.
УРОВЕНЬ ТЕХНИКИ
Известно, что моторное транспортное средство может быть снабжено механизированным средством содействия доступу, таким как механическая ступенька, механический трап или механическая навесная подножка, которое механизировано и выполнено с возможностью передвижения между сложенным и разложенным положениями. В разложенном положении, устройство содействия доступу обеспечивает содействие пассажирам, входящим или выходящим из транспортного средства, в тех случаях, когда, в ином случае, высота ступени была бы большой. Примеры таких механизмов и систем, например, известны из патентов США 3,887,217; 4,020,920; 4,116,457, которые раскрывают механические ступеньки, патента США 7,594,672, который раскрывает механическую навесную подножку, и европейского патента 0020371, который раскрывает механический трап.
Механизированное средство содействия доступу может раскладываться и убираться вручную водителем или пассажиром, нажимающими кнопки, или управляться автоматически. Типичное расположение для автоматической ступеньки, которое могло бы быть, это разложение ступеньки всякий раз, когда открывается дверь, и транспортное средство является неподвижным, и ее сложение, когда дверь закрывается.
Безусловно, нежелательно и потенциально опасно, чтобы моторное транспортное средство трогалось, когда такое средство содействия доступу разложено, и, что касается автобусов типа M2, Инструкция 7.6.10.4 ECE 107 требует, что «в случае механизированной ступеньки, не должно быть возможным, чтобы транспортное средство самостоятельно отъезжало с остановки, когда ступенька находится в разложенном положении».
Если устройство содействия доступу пассажиров не управляется непосредственно водителем, то это является конкретной проблемой, так как водитель транспортного средства может не знать, что средство содействия доступу еще разложено.
К тому же становится обычным оборудовать моторные транспортные средства устройством управления пуском-остановом, которое автоматически останавливает и запускает двигатель на основании действий водителя. Водитель моторного транспортного средства, поэтому, мог бы непреднамеренно перезапускать двигатель при все еще разложенном средстве содействия доступу.
Задача настоящего изобретения состоит в предоставлении способа управления работой двигателя моторного транспортного средства для предотвращения трогания транспортного средства, когда разложено средство содействия доступа пассажиров.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения предложен способ управления двигателем моторного транспортного средства, содержащего механизированное средство содействия доступу пассажиров и силовую передачу, содержащую многоскоростную механическую трансмиссию, имеющую нейтральное состояние и состояние включенной передачи, и сцепление для избирательного приводного присоединения многоскоростной трансмиссии к двигателю, при этом способ включает в себя этап, на котором блокируют работу двигателя, если механизированное средство содействия пассажирам находится в разложенном состоянии, и присутствует заданное условие работы силовой передачи.
Двигатель может блокироваться, только если транспортное средство было неподвижным дольше, чем заданный период времени.
Способ дополнительно может включать в себя этап, на котором считывают положение средства содействия доступу пассажиров с использованием датчика содействия доступу пассажиров для выдачи сигнала, указывающего рабочее состояние средства содействия доступу пассажиров.
Способ дополнительно может включать в себя этап, на котором блокируют двигатель, если считано, что средство содействия доступу пассажиров разложено, и приемлем показатель качества для сигнала с датчика содействия доступу пассажиров.
Условием работы силовой передачи может быть нахождение трансмиссии не в нейтральном состоянии.
Сцепление может приводиться в действие педалью сцепления, имеющей нажатое и высвобожденное состояния, и условием работы силовой передачи может быть присутствие по меньшей мере одного из нахождения трансмиссии не в нейтральном состоянии и нахождения состояния педали сцепления в нажатом состоянии.
Сцепление может приводиться в действие педалью сцепления, имеющей нажатое и высвобожденное состояния, и способ дополнительно включает этап, на котором обеспечивают указание водителю моторного транспортного средства, что двигатель вероятно должен быть заблокирован, если механизированное средство содействия пассажирам находится в разложенном состоянии, и состояние педали сцепления является нажатым состоянием.
Нажатое состояние педали сцепления может быть нажатием педали сцепления на более чем заданное смещение.
Способ дополнительно может включать в себя этап, на котором считывают состояние сцепления с использованием датчика положения сцепления, который обеспечивает сигнал, указывающий состояние педали сцепления.
Способ дополнительно может включать себя этап, на котором разрешают двигателю блокироваться, только если состояние педали сцепления считывается нажатым, и приемлем показатель качества для сигнала с датчика положения сцепления.
Педаль сцепления может иметь нажатое и высвобожденное состояния, и способ дополнительно может включать в себя этап, на котором обеспечивают указание водителю моторного транспортного средства, что двигатель вероятно должен быть заблокирован, если механизированное средство содействия пассажирам находится в разложенном состоянии, и состояние педали сцепления является нажатым состоянием.
Способ дополнительно может включать в себя этап, на котором считывают состояние трансмиссии с использованием датчика нейтральной передачи для выдачи сигнала, указывающего, находится ли трансмиссия в нейтральном состоянии.
Способ дополнительно может включать в себя этап, на котором разрешают двигателю блокироваться, только если считано, что состояние трансмиссии находится не в нейтрали, и приемлем показатель качества для сигнала с датчика нейтральной передачи.
Механизированное средство содействия доступу пассажиров может быть одним из механической ступеньки, механической навесной подножки и механического трапа.
Блокирование работы двигателя может включать себя этап, на котором предотвращают запуск двигателя, если двигатель не является работающим.
Блокирование работы двигателя может включать в себя этап, на котором останавливают двигатель, если двигатель является работающим на данный момент.
Согласно второму аспекту изобретения, предложена система управления для управления работой двигателя моторного транспортного средства, содержащего механизированное средство содействия доступу пассажиров и силовую передачу, содержащую многоскоростную механическую трансмиссию, имеющую нейтральное состояние и состояние включенной передачи, избирательно приводимую в движение двигателем, и сцепление, управляемое педалью сцепления для избирательного приводного присоединения многоскоростной трансмиссии к двигателю, при этом система содержит электронный контроллер, по меньшей мере один датчик условия работы силовой передачи для выдачи сигнала в электронный контроллер, указывающего состояние работы силовой передачи, и датчик содействия доступу пассажиров для выдачи сигнала, указывающего рабочее состояние механизированного средства содействия доступу пассажиров, и электронный контроллер, выполненный с возможностью блокирования работы двигателя, когда считано, что механизированное средство содействия пассажирам находится в разложенном состоянии, и считано, что присутствует заданное условие работы силовой передачи.
По меньшей мере один датчик условия работы силовой передачи может быть датчиком нейтральной передачи для выдачи сигнала в электронный контроллер, указывающего, когда многоскоростная трансмиссия находится в нейтральном состоянии, при этом заданное условие работы силовой передачи существует, когда считано, что многоскоростная трансмиссия находится не в нейтральном состоянии.
Способ дополнительно может включать в себя этап, на котором разрешают двигателю блокироваться, только если считано, что состояние трансмиссии находится не в нейтрали, и приемлем показатель качества для сигнала с датчика нейтральной передачи.
В качестве альтернативы, по меньшей мере один датчик условия работы силовой передачи может содержать датчик нейтральной передачи для выдачи сигнала в электронный контроллер, указывающего, когда трансмиссия находится в нейтральном состоянии, и датчик положения педали сцепления для выдачи сигнала в электронный контроллер, указывающего состояние педали сцепления, при этом заданное условие работы силовой передачи может быть присутствием по меньшей мере одного из считывания, что трансмиссия находится не в нейтральном состоянии и считывания, что педаль сцепления находится в нажатом состоянии.
Нажатое состояние педали сцепления может быть нажатием педали сцепления на более чем заданное смещение.
Способ дополнительно может включать в себя этап, на котором разрешают двигателю блокироваться, только если считано, что состояние педали сцепления нажатым, и приемлем показатель качества для сигнала с датчика положения сцепления.
Электронный контроллер может включать в себя таймер для измерения времени, которое транспортное средство остается неподвижным, и электронный контроллер может быть выполнен с возможностью блокирования работы двигателя, только если время, которое транспортное средство оставалось неподвижным, в качестве указываемого таймером, является более продолжительным, чем заданный период времени.
Механизированное средство содействия доступу пассажиров может быть одним из механической ступеньки, механической навесной подножки и механического трапа.
Блокирование работы двигателя может включать в себя этап, на котором предотвращают запуск двигателя, если двигатель не является работающим.
Блокирование работы двигателя может включать в себя этап, на котором останавливают двигатель, если двигатель является работающим на данный момент.
Согласно третьему аспекту изобретения, предложено моторное транспортное средство, содержащее систему управления двигателем, выполненную в соответствии с упомянутым вторым аспектом изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее, изобретение, в качестве примера будет описано со ссылкой на прилагаемые чертежи, на которых:
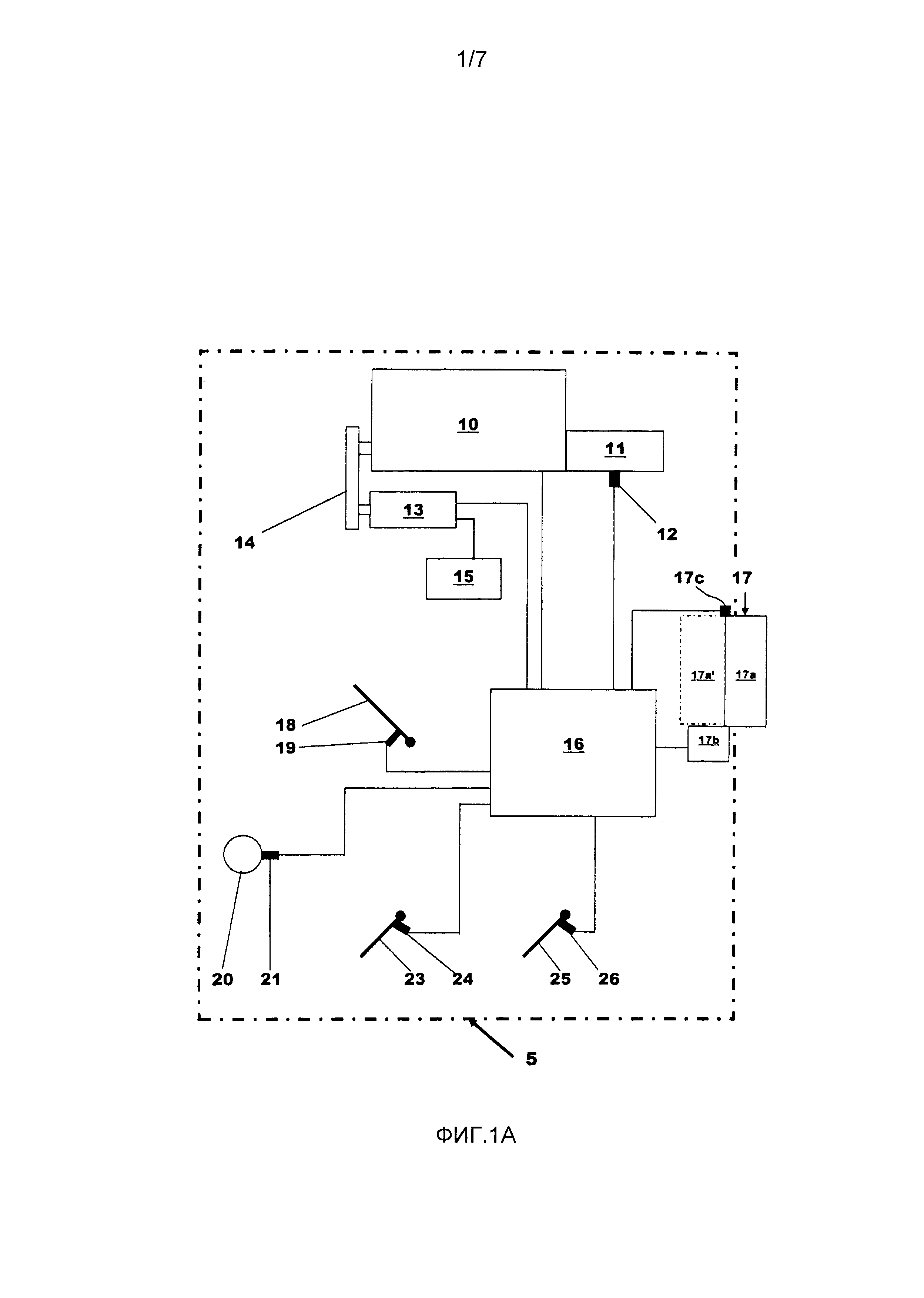
фиг. 1A - схематичное представление моторного транспортного средства согласно третьему аспекту изобретения, содержащего систему управления двигателем согласно второму аспекту изобретения;
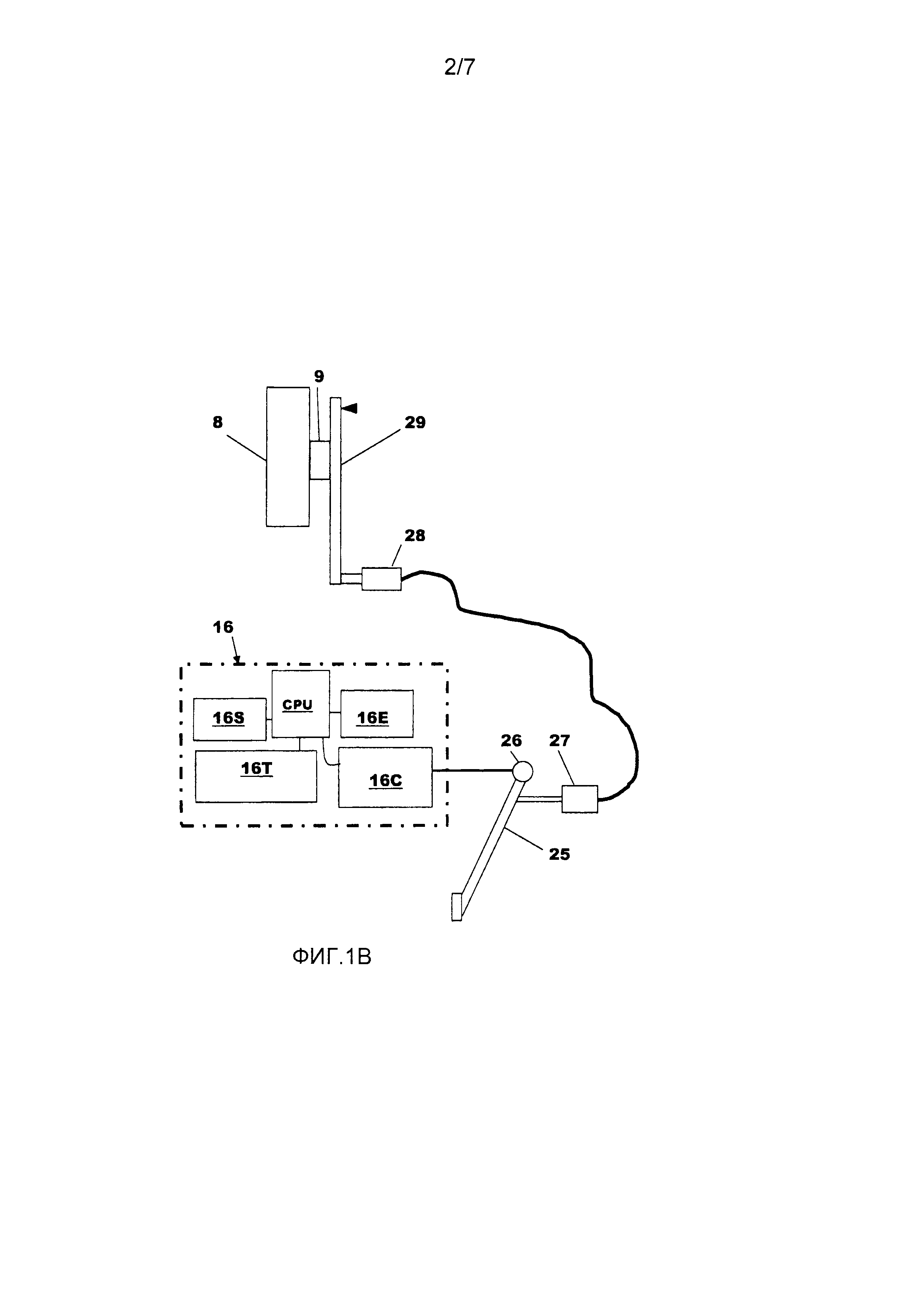
фиг. 1B - схематичное представление системы привода сцепления, образующей часть системы управления двигателем по фиг. 1A;
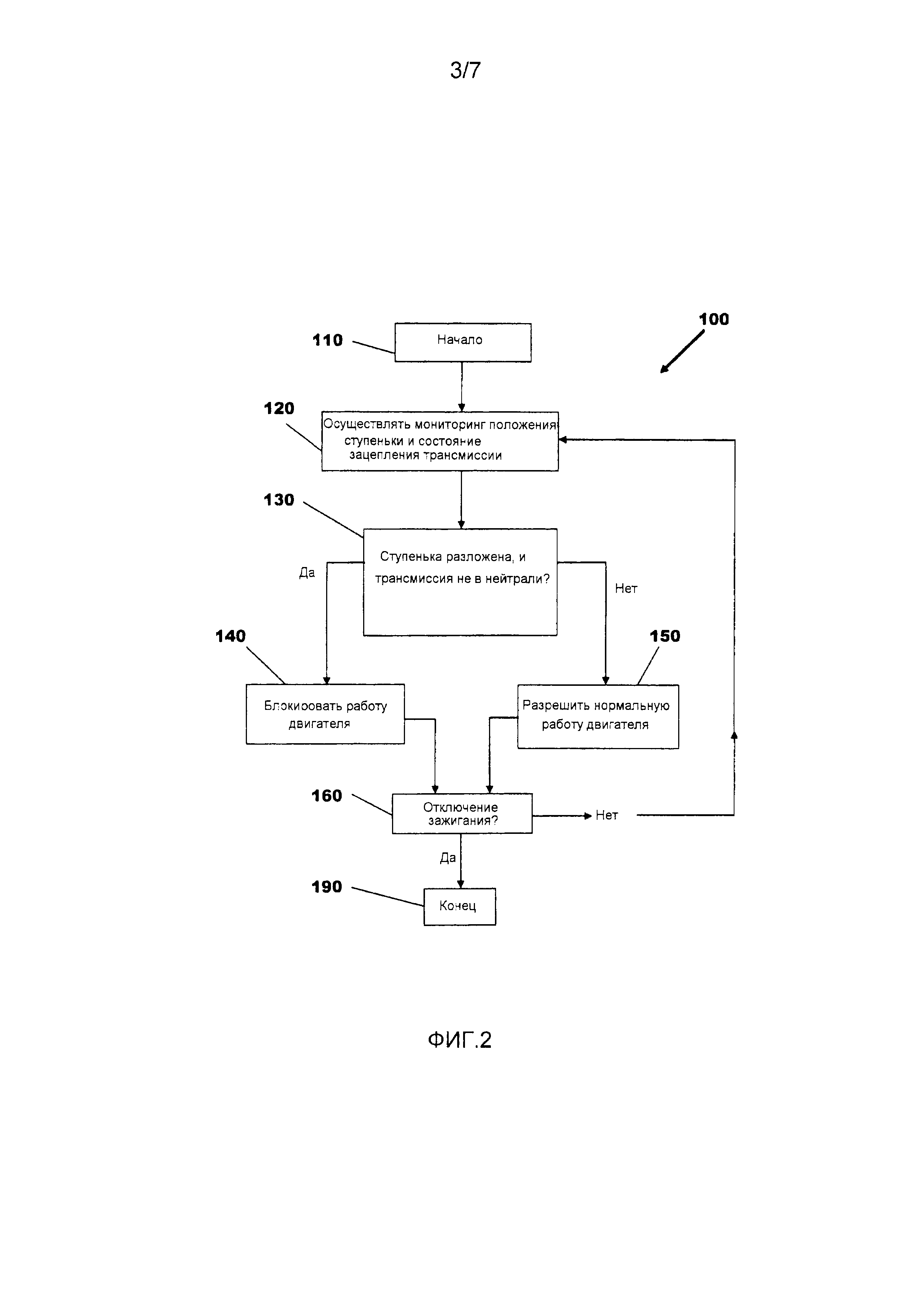
фиг. 2 - высокоуровневая блок-схема последовательности операций способа, показывающая способ управления работой двигателя согласно первому аспекту изобретения;
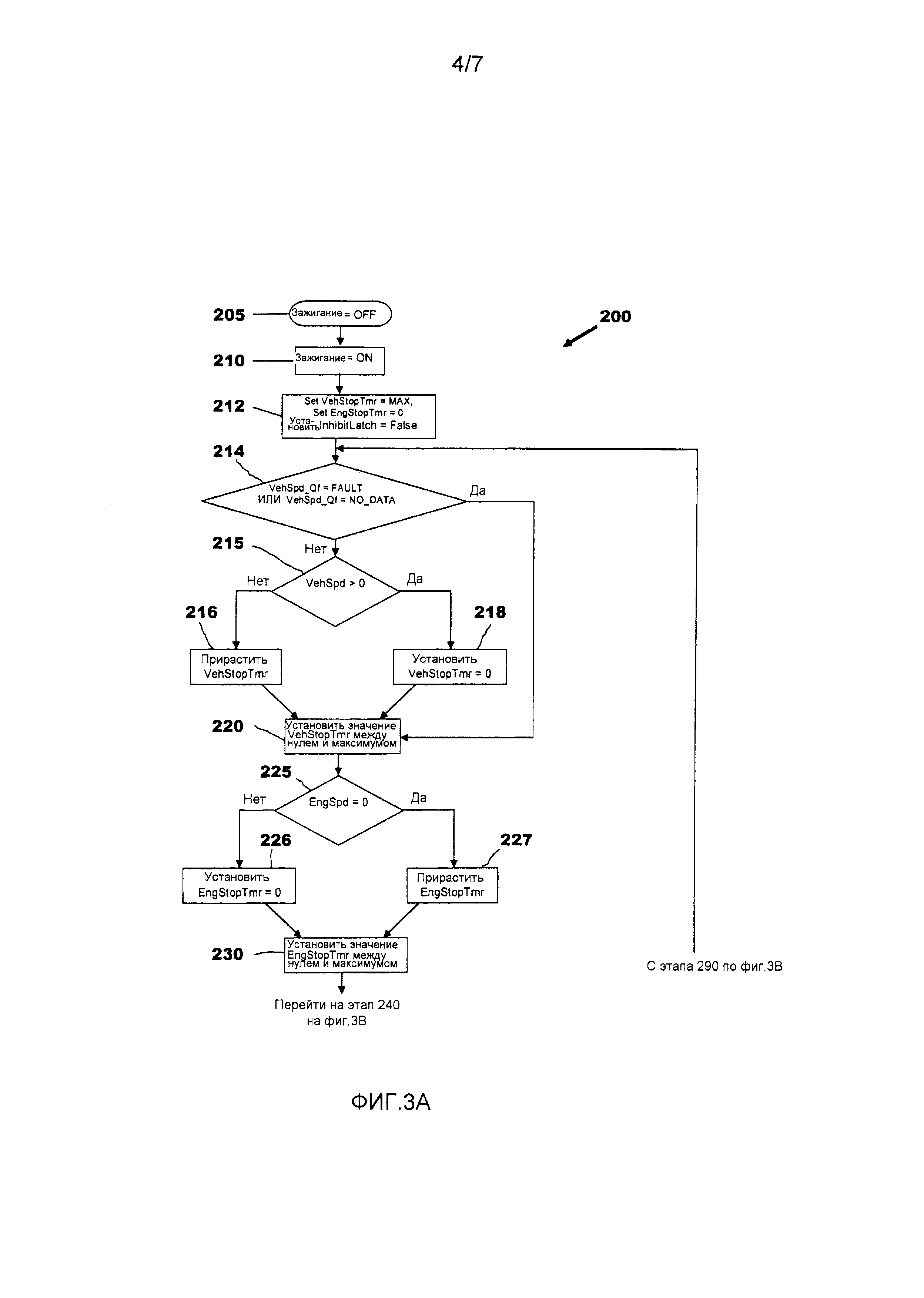
фиг. 3A и 3B образуют, в комбинации, блок-схему последовательности операций способа, показывающую первый вариант осуществления способа управления работой двигателя согласно первому аспекту изобретения; и
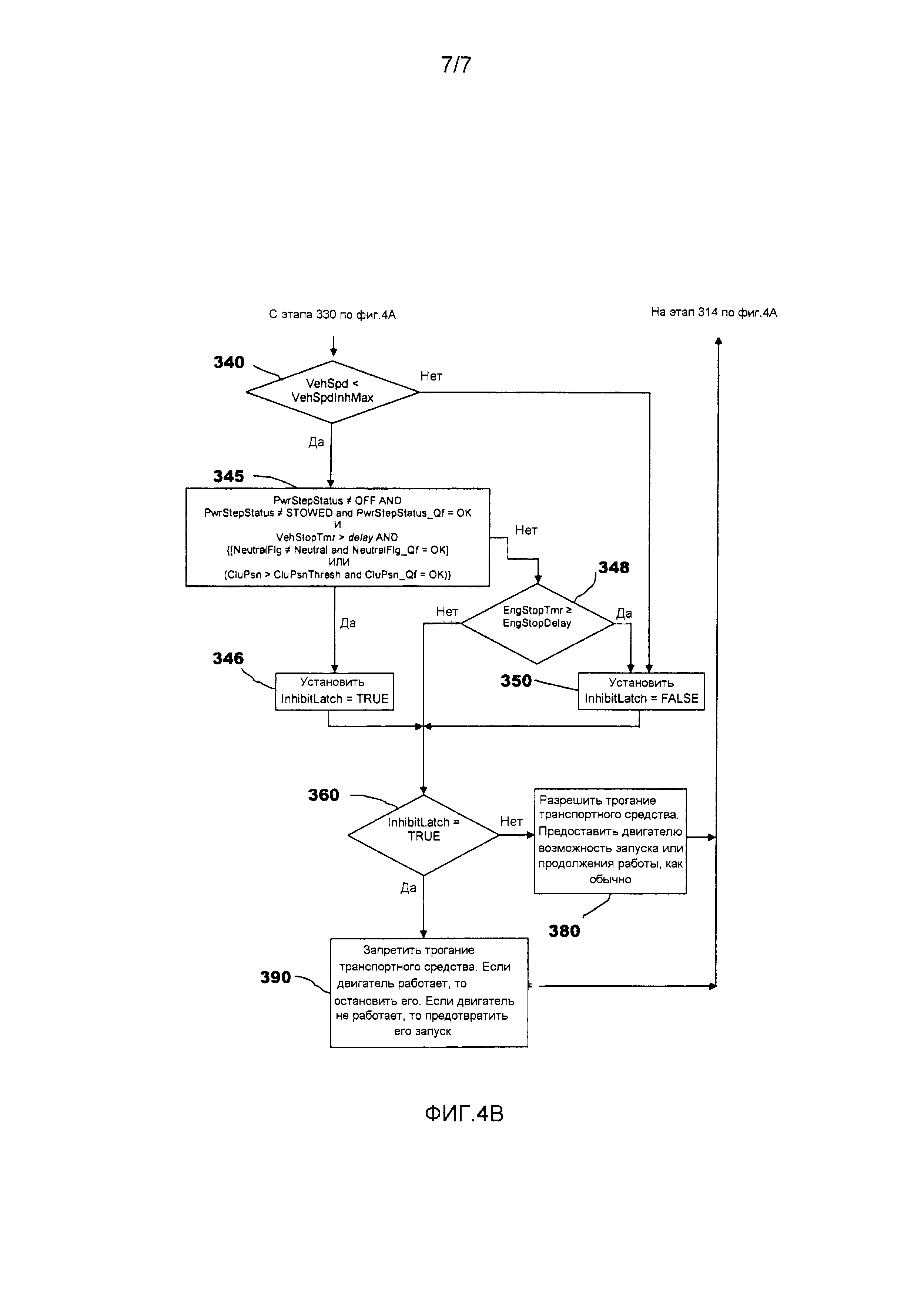
фиг. 4A и 4B образуют, в комбинации, блок-схему последовательности операций способа, показывающую второй вариант осуществления способа управления работой двигателя согласно первому аспекту изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на фиг. 1A и 1B, показано моторное транспортное средство 5, содержащее двигатель 10, приводящий в действие многоскоростную механическую трансмиссию 11. Механическая трансмиссия 11 приводного присоединена к двигателю 10 сцеплением 8 (не показанным на фиг. 1A), которое сцепляется или расцепляется водителем моторного транспортного средства 5, и содержит рычаг переключения передач (не показан), посредством которого водитель способен выбирать любую из передач механической трансмиссии 11. Рычаг переключения передач подвижен между несколькими положениями, в том числе, по меньшей мере одним положением «на передаче», в котором выбрана передача, образующая часть трансмиссии, и «нейтральным» положением, в котором не выбрана ни одна из передач трансмиссии. Когда рычаг переключения передач перемещен в «нейтральное» положение, трансмиссия 11 упоминается находящейся в «нейтральном» состоянии, в котором привод не передается трансмиссией 11, а когда рычаг переключения передач перемещен в положение «на передаче», трансмиссия 11 упоминается находящейся в состоянии «на передаче», в котором привод может передаваться трансмиссией 11.
Стартер-генератор 13 двигателя приводного присоединен к двигателю 10 гибким приводом в виде приводного ремня или цепным приводом 14 к коленчатому валу двигателя 10. Стартер-генератор 13 присоединен к источнику электрической энергии в виде аккумуляторной батареи 15. Изобретение не ограничено использованием стартера-генератора 13, и стартер-генератор 13 мог бы быть заменен стартерным электродвигателем для запуска двигателя 10.
Следует принимать во внимание, что, при запуске двигателя 10, стартер-генератор 13 приводит в движение коленчатый вал двигателя 10, и что в другие моменты времени стартер-генератор приводится в движение двигателем 10 для выработки электрической энергии.
Управляемое водителем двухпозиционное устройство в виде управляемого ключом замка зажигания (не показан) используется для управления электрическим состоянием моторного транспортного средства 5. То есть, когда замок зажигания находится в положении «включения зажигания», все основные электрические цепи моторного транспортного средства запущены в работу, а когда замок зажигания находится в положении «выключения зажигания», большинство электрических цепей моторного транспортного средства 5 выведены из работы. Замок зажигания также может иметь третье кратковременное положение, используемое для ручного запуска двигателя 10. Следует принимать во внимание, что другие устройства могут использоваться для обеспечения этих функциональных возможностей, и что изобретение не ограничено использованием замка зажигания.
Механизированное средство содействия доступу пассажиров предусмотрено в виде механизированной ступеньки 17, показанной в разложенном положении в качестве 17a, а в сложенном положении в качестве 17a’ на фиг. 1A. Механизированная ступенька 17 передвигается между разложенным 17a и сложенным 17a’ положениями посредством приводного механизма 17b ступеньки, который может иметь любую известную форму. То есть, ступенька 17 может передвигаться посредством электродвигателя или посредством гидравлического исполнительного механизма между разложенным 17a и сложенным 17a’ положениями.
Датчик 17c положения ступеньки используется для выдачи сигнала, указывающего рабочее положение ступеньки 17. Датчик 17c положения контролирует, ступеньку 17 или часть приводного механизма 17b ступеньки некоторым образом, допускающим определение, является ли ступенька 17 разложенной 17a или сложенной 17a’. Датчик 17c положения мог бы быть датчиком приближения или контактным датчиком любого известного типа.
Электронный контроллер 16 присоединен к датчику 17c положения ступеньки, стартеру-генератору 13, к двигателю 10, к датчику 12 выбора нейтральной передачи, используемому для контроля, находится или нет трансмиссия 11 в нейтрали, к датчику 21 технической скорости, используемому для измерения скорости вращения ходового колеса 20, к датчику 24 положения тормозной педали, используемому для контроля положения тормозной педали 23, к датчику 26 положения педали сцепления, используемому для контроля положения педали 25 сцепления, и к датчику 19 положения педали акселератора, используемому для контроля положения педали 18 акселератора и выдачи сигнала, указывающего положение дросселя. Педаль 18 акселератора обеспечивает водительский ввод требуемой мощности на выходе из двигателя 10. Если педаль 18 акселератора была перемещена из исходного положения, она упоминается находящейся в нажатом положении или в нажатом состоянии.
Хотя измерение скорости моторного транспортного средства описано выше со ссылкой на использование датчика 21 ходового колеса, которые часто уже присутствуют на моторном транспортном средстве как часть тормозной антиблокировочной системы, следует принимать во внимание, что другие пригодные средства могут использоваться для определения скорости моторного транспортного средства 5.
Следует принимать во внимание, что термин датчик рычага переключения передач не ограничен датчиком, который контролирует положение рычага переключения передач, но скорее является любым устройством, которое может выдавать обратную связь о том, находится ли трансмиссия 11 на передаче или в нейтрали.
В этом случае, система считывания положения педали сцепления содержит датчик 26 линейного положения, используемый для контроля фактического положения педали 25 сцепления, и электронный процессор 16C положения педали сцепления, используемый для переработки сигнала положения с датчика 26 положения сцепления в выходной сигнал управления для использования электронным контроллером 16 с использованием логики, хранимой в процессоре 16C положения педали сцепления.
Датчик 26 положения сцепления может содержать один или более датчиков положения, таких как поворотные переменные резисторы.
Определение состояния педали 25 сцепления в качестве нажатой или высвобожденной выполняется процессором 16C положения педали сцепления, образующим часть электронного контроллера 16, с использованием сигнала положения сцепления, принятого с датчика 26 положения. Сигнал положения сцепления представляет текущее положение (CP) педали 25 сцепления. Следует принимать во внимание, что педаль 25 сцепления является подвижной от высвобожденного положения или состояния, когда никакая нагрузка не приложена к ней, до полностью нажатого состояния, когда водитель приложил силу для передвижения ее в положение максимального смещения. Педаль 25 сцепления упоминается находящейся в нажатом состоянии, когда она была перемещена водителем на большую, чем заданная, величину от высвобожденного положения.
Следует принимать во внимание, что изобретение не ограничено использованием линейного датчика положения для считывания положения педали 25 сцепления и, например, выключатели могли бы использоваться для указания нажатого и высвобожденного состояний педали 25 сцепления.
Как показано на фиг. 1B система привода сцепления, в этом случае, образована педалью 25 сцепления, главным гидравлическим цилиндром 27, вспомогательным гидравлическим цилиндром 28 и рычагом 29 механизма выключения сцепления, который включает и выключает сцепление 8 через выжимной подшипник 9. Однако, следует принимать во внимание, что другие средства могли бы использоваться для преобразования передвижения педали 25 сцепления во включение или выключение сцепления 8, и что изобретение не ограничено использованием гидравлической системы привода сцепления. Кроме того, следует принимать во внимание, что педаль 25 сцепления используется для приведения в действие сцепления 8.
Также следует принимать во внимание, что электронный процессор 16C положения педали сцепления мог бы быть отдельным блоком и не должен, как показано, быть образованным в качестве части электронного контроллера 16.
Электронный контроллер 16 принимает несколько сигналов из двигателя 10, в том числе, сигнал, указывающий скорость вращения двигателя 10, с датчика скорости вращения (не показан) и отправляет сигналы в двигатель, используемые для управления работой двигателя 10. В этом случае, двигатель 10 является двигателем 10 с искровым зажиганием, и сигналы, отправляемые из электронного контроллера 16, используются для управления системой подачи топлива (не показана) для двигателя 10 и системой зажигания (не показана) для двигателя 10. Если бы двигатель 10 должен был быть дизельным двигателем, то управлялась бы подача топлива в двигатель. Электронный контролер 16 содержит различные компоненты, в том числе, центральное процессорное устройство (ЦПУ, CPU), устройства памяти, таймеры и устройства обработки сигналов для преобразования сигналов с датчиков, присоединенных к электронному контроллеру 16, в данные, которые используются электронным контроллером 16 для управления работой двигателя 10.
Как показано на фиг. 1B, в этом случае, электронный контроллер 16 содержит ЦПУ, процессор 16C положения педали сцепления, контроллер 16E двигателя, контроллер 16S ступеньки и модуль 16T состояния трансмиссии. Следует принимать во внимание, что все из этих различных компонентов могли бы быть выполнены в качестве части отдельных блоков, которые поддерживают связь друг с другом другим способом, чтобы осуществлять требуемое управление двигателем 10 и другими системами, требующими управления, и не обязательно должны быть образованы в качестве части центрального контроллера, такого как электронный контроллер 16.
Контроллер 16S ступеньки управляет работой ступеньки 17 и выдает обратную связь в отношении того, является ли ступенька 17 разложенной 17a или сложенной 17a’. Контроллер 16S ступеньки выполнен с возможностью управления движением ступеньки 17, поддерживая связь с приводным механизмом 17b ступеньки. Например, контроллер ступеньки может раскладывать ступеньку 17, если дверь, прилегающая к ступеньке 17, открыта, и складывать ступеньку 17, если дверь закрыта. В таком случае, контроллер ступеньки принимал бы, в дополнение к сигналу с датчика 17c положения ступеньки, указывающему положение ступеньки, сигнал с датчика открывания двери, такого как выключатель (не показан), который указывает, открыта или закрыта дверь.
Модуль 16T состояния трансмиссии определяет, находится ли трансмиссия 11 в нейтрали, а также выдает сигнал качества, указывающий, работает ли датчик 12 корректно. Заявка GB-A-2,466,040 на выдачу патента UK описывает систему для гарантирования, что трансмиссия, такая как трансмиссия 11, находится в нейтрали, заявка GB-A-2,466,188 на выдачу патента UK описывает систему для обеспечения качественного сигнала с датчика нейтральной передачи, и заявка GB-A-2,466,479 на выдачу патента UK описывает систему проверки правдоподобия для такого датчика нейтральной передачи. Описания заявок GB-A-2,466,040; GB-A-2,466,188; и GB-A-2,466,479 на выдачу патента UK включены в материалы настоящего описания посредством ссылки на них.
В системе, описанной в упомянутых заявках на выдачу патента UK, магнитная мишень подвергается мониторингу датчиком, чтобы определять угловое положение головки рычага переключения передач, используемой для выбора различных передач трансмиссии 11. Головка передвигается под действием водителя посредством рычага переключения передач.
Модуль 16T состояния трансмиссии, с использованием технологий, описанных в упомянутых заявках на выдачу патента UK, в таком случае, может определять, находится ли трансмиссия 11 в нейтрали, наряду с качеством сигнала, вырабатываемого датчиком 12 нейтральной передачи.
Однако следует принимать во внимание, что могли бы использоваться другие технологии, использующие датчик для определения, находится ли трансмиссия 11 в нейтрали.
Во время нормальной работы двигателя, контроллер 16E двигателя выполнен с возможностью управления топливом, подаваемым в двигатель 10, и регулирования системы зажигания, так чтобы искры подавались в двигатель 10 со свечей зажигания с правильными временными характеристиками для создания требуемого крутящего момента двигателя.
Контроллер 16E двигателя также управляет работой двигателя 10 таким образом, чтобы обеспечивать два режима работы, первый, или нормальный режим работы, и второй, или блокированный режим.
Электронный контроллер 16 выполнен с возможностью определения, уместна ли работа двигателя 10 в первом режиме или втором режиме, на основании одного или более рабочих параметров транспортного средства, в том числе, скорости моторного транспортного средства 5, рабочего состояния ступеньки 17 и, в некоторых вариантах осуществления, положения педали 25 сцепления.
Электронный контроллер 16, с использованием различных сигналов, которые он принимает из модуля 16T состояния трансмиссии, контроллера 16S ступеньки, датчика 21 скорости транспортного средства и электронного процессора 16C положения педали сцепления, гарантирует, что моторное транспортное средство 5 не может выйти из неподвижного состояния, если ступенька 17 находится в разложенном положении 17a посредством выбора второго режима работы двигателя, если ступенька 17 находится в разложенном положении 17a.
Контроллер 16E двигателя выполнен с возможностью, во втором режиме работы, блокирования работы двигателя 10 посредством остановки двигателя 10 из работы, если он является работающим на данный момент, или, если двигатель 10 не является работающим на данный момент, предохранения двигателя 10 от запуска.
В случае неработающего двигателя 10, двигатель 10 предохраняется от запуска посредством вывода из работы стартера-генератора 13. То есть, электронный контроллер 16 прекращает питание, подаваемое из аккумуляторной батареи 15 на стартер-генератор 13 независимо от любых команд, выдаваемых водителем или, если такая система установлена в транспортное средство 5, контроллером пуска-останова.
В случае работающего двигателя, он может останавливаться несколькими способами, в том числе, устранением зажигания у двигателя с искровым зажиганием и устранением подачи топлива в случае любого типа двигателя 10.
Поэтому, подводя итог вышесказанному, электронный контроллер 16, который может быть модулем управления силовой передачей, вследствие этого, решает, следует ли блокировать трогание транспортного средства, на основании некоторого количества сигналов:
Во-первых, сигнал нейтрали и показатель качества. Электронный контроллер 16, а точнее, модуль 16T состояния трансмиссии, принимает и интерпретирует сигнал с датчика 12 нейтральной передачи, который измеряет положение головки переключения или промежуточного вала механической трансмиссии 11 и, тем самым, определяет, выбрано или нет состояние нейтральной передачи. Используется флажковый признак нейтрали, имеющий два состояния, NeutralFlg = {NOT_NEUTRAL | NEUTRAL}.
В дополнение, электронный контроллер 16, а точнее, контроллер 16T состояния трансмиссии определяет «показатель качества» для этого сигнала, который показывает, есть ли какая-нибудь ошибка в указании нейтрали.
Во-вторых, состояние механической ступеньки и показатель качества. Электронный блок 16 управления принимает сигнал из контроллера 16S механической ступеньки, указывающий состояние ступеньки.
СОСТОЯНИЕ ИМЕЕТ ЧЕТЫРЕ ВАРИАНТА:
PwrStepStatus = {OFF | STOWED | NOT_STOWED | POSN_UNKNOWN} ({ВЫКЛЮЧЕНА | СЛОЖЕНА | НЕ_СЛОЖЕНА | НЕИЗВЕСТНОЕ_ПОЛОЖЕНИЕ})
Таковые наряду с результирующими действиями обобщены ниже в таблице 1.
|
Электронный контроллер 16, а точнее, контроллер 16S также будет устанавливать «показатель качества» для этого сигнала (PwrStepStatus_Qf), который устанавливается в «OK» если сигнал PwrStepStatus принимается без ошибки, и в «FAULT», если сигнал отсутствует или искажен.
В-третьих, скорость транспортного средства и показатель качества. Электронный контроллер 16 принимает сигнал, который указывает скорость транспортного средства, которая типично измеряется датчиком 21 скорости вращения колеса или датчиком скорости вращения на выходном валу трансмиссии. Есть показатель качества, связанный с этим сигналом, который показывает, является ли информация о скорости транспортного средства достоверной.
В-четвертых, скорость вращения двигателя. Электронный контроллер 16 или, точнее, контроллер 16E двигателя рассчитывает скорость вращения двигателя. Это типично основано на сигнале с датчика, который выявляет вращение коленчатого вала или маховика.
Далее, со ссылкой на фиг. 2, показана высокоуровневая блок-схема способа 100 управления работой двигателя, такого как двигатель 10, в соответствии с изобретением.
Способ начинается на этапе 110, который типично является событием «включения зажигания» транспортного средства. Способ затем переходит на этап 120, на котором осуществляют мониторинг положения ступеньки 17 датчиком 17c положения ступеньки и обеспечивают результирующий сигнал, и подобным образом определяют, находится или нет трансмиссия в «нейтральном» состоянии.
Способ затем переходит на этап 130, на котором сигнал с датчика 17c положения ступеньки оценивают, чтобы определять, указывает ли он, что ступенька 17 находится в разложенном положении 17a или в сложенном положении 17a’, и присутствует ли состояние заданного условия работы силовой передачи. В этом случае, заданное условие работы силовой передачи состоит в том, является ли состояние зацепления трансмиссии 11 не нейтральным состоянием.
Если ступенька 17 находится в разложенном положении 17a, и сигнал с датчика 12 передачи указывает, что трансмиссия 11 не находится в нейтрали, то способ переходит с этапа 130 на этап 140, на котором, посредством контроллера 16E двигателя, активизируют работу двигателя 10 во втором или блокированном режиме работы.
Способ затем переходит с этапа 140 на этап 160, на котором определяют, произошло ли событие «выключения зажигания», если оно произошло, способ заканчивается на этапе 190, но, если оно не произошло, способ возвращается на этап 120 и будет продолжаться для замыкания цикла через этапы 120, 130, 140 и 160, если только состояние ступенек остается прежним.
Возвращаясь к этапу 130, если ступенька 17 не находится в разложенном положении 17a, или сигнал с датчика 12 передачи указывает, что трансмиссия 11 находится в нейтральном состоянии, то способ переходит на этап 150, на котором, посредством контроллера 16E двигателя, разрешают работу двигателя 10 в первом, или нормальном, режиме работы.
Способ затем переходит с этапа 150 на этап 160, на котором определяют, произошло ли событие «выключения зажигания», если оно произошло, способ заканчивается на этапе 190, но, если оно не произошло, способ возвращается на этап 120 и будет продолжаться для замыкания цикла через этапы 120, 130, 150 и 160, если только состояние ступенек остается прежним.
В качестве дополнения к вышеприведенному способу, способ дополнительно может включать в себя этап, на котором измеряют скорость транспортного средства. Если скорость транспортного средства находится выше верхнего предела скорости, такого как, например и без ограничения, 15 км/ч, водителю может выдаваться предупреждение, такое как «STOP» («ОСТАНОВКА») или «СТУПЕНЬКА СНАРУЖИ», если ступенька 17 остается в разложенном положении 17a, вместо останова двигателя 10. Это будет предохранять останов двигателя 10 при транспортном средстве 5 в движении в ситуации, которая могла бы создавать угрозу безопасности.
Далее, со ссылкой на блок-схемы последовательности операций способа, показанные на фиг. 3A, 3B, 4A и 4B, показаны, соответственно, примерные первый и второй варианты осуществления способа предохранения транспортного средства от трогания при разложенной механической ступеньке 17.
НА ФИГУРАХ, ИСПОЛЬЗУЮТСЯ СЛЕДУЮЩИЕ АББРЕВИАТУРЫ:
VehStopTmr = таймер, который указывает, насколько долго скорость транспортного средства была по существу нулевой,
VehStopDelay = время, с которым сравнивается таймер «остановленного транспортного средства» (VehStopTmr) (примерное значение = 0,7 секунды),
VehSpd = скорость транспортного средства,
VehSpd_Qf = показатель достоверности сигнала скорости транспортного средства,
VehSpdInhMax = признак блокировки привода не будет останавливать двигатель на или выше этой предельной скорости транспортного средства (примерное значение = 15 км/ч),
EngStopTmr = таймер, который указывает, насколько долго скорость вращения двигателя была по существу нулевой,
EngStopDelay = время, с которым сравнивается таймер «остановленного двигателя» (EngStopTmr) (примерное значение = 0,2 секунды),
EngSpd = скорость вращения двигателя,
PwrStepStatus = состояние механической ступеньки, и принимает одно из значений {OFF|STOWED|NOT_STOWED| POSN_UNKNOWN} ({ОТКЛЮЧЕНА|СЛОЖЕНА|НЕ_СЛОЖЕНА| НЕИЗВЕСТНОЕ_ПОЛОЖЕНИЕ}),
PwrStepStatus_Qf = показатель достоверности сигнала PwrStepStatus,
NeutralFlg = флажковый признак, который указывает, когда выбрана нейтральная передача,
NeutralFlg_Qf = показатель достоверности сигнала NeutralFlg,
InhibitLatch = триггерный флажковый признак, который, когда установлен в TRUE (ИСТИНА), указывает, что привод транспортного средства должен быть заблокирован,
CluPsn = сигнал положения сцепления с датчика 26 педали сцепления,
CluPsnThresh = пороговое положение педали сцепления (заданная величина нажатия педали сцепления), и
CluPsn_Qf = показатель достоверности сигнала положения сцепления.
Во всех случаях, сигналы показателя качества могут принимать значения {FAULT|NO_DATA|NOT_IN_SPEC|OK} ({ОШИБКА|НЕТ_ДАННЫХ|ВНЕ_ТЕХНИЧЕСКИХ_ТРЕБОВАНИЙ|НОРМАЛЬНЫЙ}).
Отметим, что NOT_IN_SPEC означает, что данные ухудшены до некоторой степени, но по-прежнему могли бы быть удовлетворительными для некоторых применений. Например, в тех случаях, когда используется избыточное считывание, один из сигналов датчика может быть дефектным.
Далее, в частности со ссылкой на фиг. 3A и 3B, показан способ 200, представляющий первый вариант осуществления способа управления двигателем.
На этапе 205, зажигание моторного транспортного средства 5 выключают, при этом все основные электрические цепи моторного транспортного средств 5 неактивны. Этап 210 указывает, что зажигание транспортного средства включают (событие включения зажигания), тем самым, активируя основные электрические цепи моторного транспортного средства 5.
С переходом на этап 212, таймер, известный как таймер «остановленного транспортного средства» (VehStopTmr), устанавливают в большое значение, которое будет превышать пороговое значение (VehStopDelay). Таймер остановки транспортного средства используют для регистрации того, как долго транспортное средство было неподвижным. Если скорость транспортного средства больше, чем ноль, таймер (VehStopTmr) устанавливается в ноль, иначе, он инкрементируется в каждом цикле выполнения. Однако если показатель качества скорости транспортного средства указывает, что сигнал скорости транспортного средства недостоверен (VehSpd_Qf = FAULT | NO_DATA), то таймер останавливается, не подвергаясь ни положительному, ни отрицательному приращению. Значение таймера впоследствии на этапе 220 устанавливается в значение между нулем и максимальным значением для предотвращения его оборачивания по кругу. К тому же, на этапе 212, подобный таймер, таймер «остановленного двигателя» (EngStopTmr) инициализируют нулем, когда включают зажигание. Этот таймер инкрементируется всякий раз, когда скорость вращения двигателя имеет значение ноль, и таймер устанавливается в ноль, когда скорость вращения двигателя не является нулевой.
На этапе 214, определяют, находится ли показатель качества скорости вращения двигателя в значении «Ошибка», или не представлено никаких данных. Если любое из этих условий справедливо, то способ переходит непосредственно на этап 220, иначе, он переходит на этап 215.
На этапе 215, определяют, находится ли скорость транспортного средства выше нуля, если нет, то, на этапе 216, таймер остановки транспортного средства инкрементируют перед переходом на этап 220, тогда как, если скорость транспортного средства находится выше нуля, способ переходит на этап 218, на котором сбрасывают таймер остановки транспортного средства в ноль перед переходом на этап 220.
На этапе 220, таймер остановки транспортного средства устанавливают в значение в диапазоне между нулем и максимальным допустимым значением для таймера.
Затем, на этапе 225, скорость вращения двигателя проверяют, находится ли она выше нуля, то есть, является ли двигатель 10 работающим на данный момент. Если двигатель 10 работает, способ переходит на этап 226, на котором обнуляют таймер останова двигателя, а затем, на этап 230. Если двигатель 10 не является работающим, способ переходит с этапа 225 на этап 227, на котором инкрементируют таймер останова двигателя, а затем, на этап 230.
На этапе 230, таймер остановки двигателя устанавливают в значение между нулем и максимальным допустимым пределом.
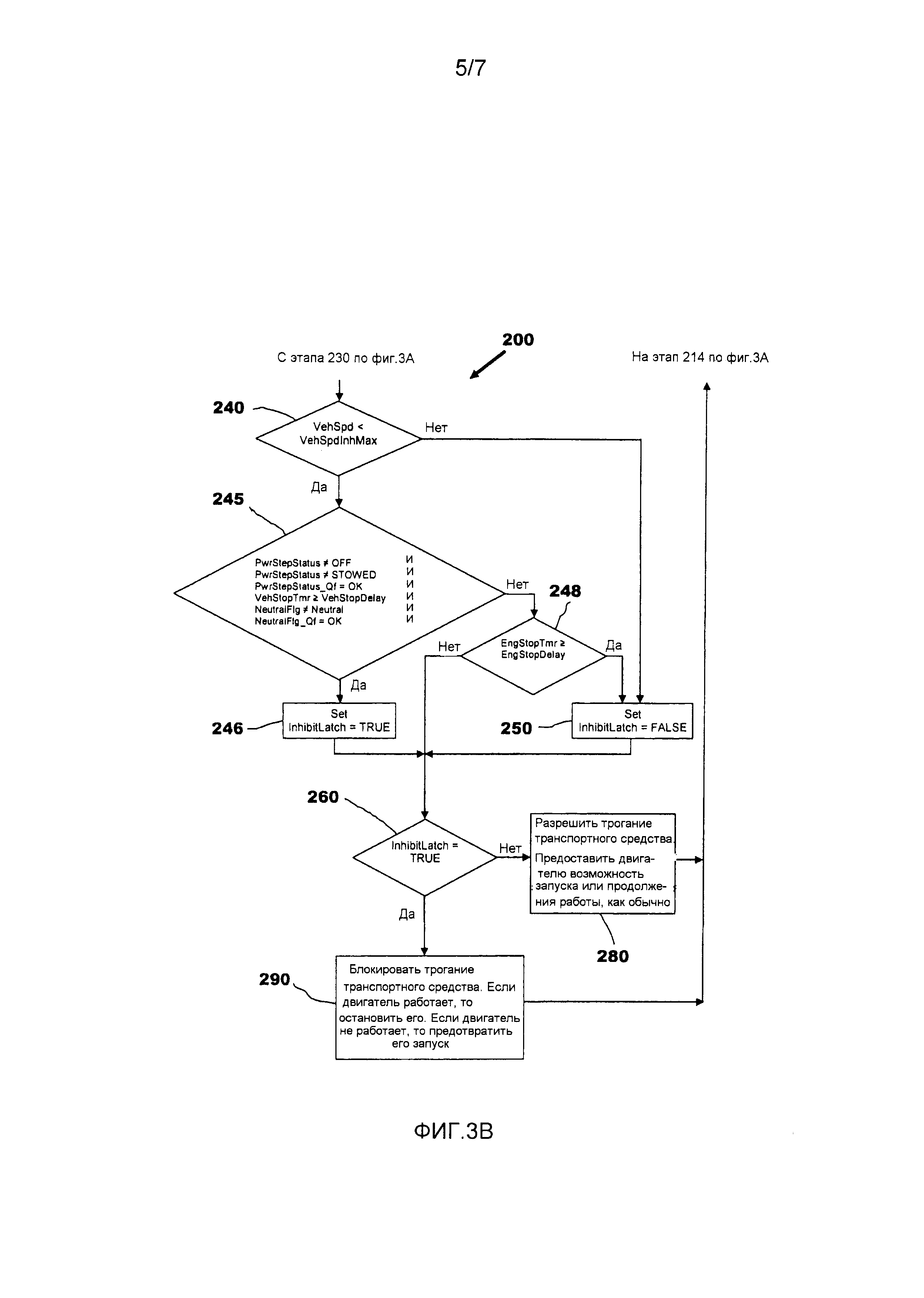
С этапа 230 способ переходит на этап 240, на котором проверяют, находится ли скорость транспортного средства ниже верхнего предела скорости транспортного средства, который типично имеет значение от 5 до 15 км/ч. Если нет, то способ переходит на этап 250, на котором состояние триггера устанавливают в «False», а затем, на этап 260, на котором состояние триггера проверяют. Так как на этапе 250 состояние триггера было установлено в «False», то с этапа 260 способ переходит на этап 280, на котором обеспечивают возможность первого, или нормального, режима работы двигателя. То есть, когда скорость транспортного средства находится выше верхнего предела скорости транспортного средства, двигатель никогда не блокируется.
Возвращаясь на этап 240, если скорость транспортного средства находится ниже верхнего предела скорости транспортного средства, способ переходит на этап 245, который является этапом первичного решения способа.
На этапе 245, принимают первичное решение, следует ли разрешить или предотвратить трогание транспортного средства.
Следующие условия все должны быть удовлетворены на этапе 245, для блокировки трогания транспортного средства:
Механическая ступенька должна быть не «OFF» и не «STOWED»,
И качество сигнала состояния механической ступеньки должно иметь значение «OK»,
И транспортное средство должно быть неподвижным, или скорость транспортного средство должна быть по существу нулевой, в течение по меньшей мере VehStopDelay секунд,
И не должна быть включена нейтральная передача,
И качество сигнала нейтральной передачи должно иметь значение «OK»,
В этом случае, заданное условие работы силовой передачи используется в комбинации с состоянием механической ступеньки. Заданное рабочее состояние силовой передачи является нахождением трансмиссии 11 в нейтральном состоянии.
Если не удовлетворены все из этих условий, то способ переходит на этап 248, на котором проверяют, является ли таймер останова двигателя большим, чем предельное значение задержки останова двигателя. Если таймер останов двигателя больше, чем предельное значение задержки останова двигателя, способ переходит на этап 250, на котором триггер блокировки устанавливают в «False», а затем, на этап 260. На этапе 260, проверяют состояние триггера блокировки, и так как он был установлен в «False» на этапе 250, способ затем переходит на этап 280, и разрешают трогание транспортного средства.
Цель задержки (EngStopDelay) на этапе 248 состоит в гарантировании того, что, как только команда остановить двигатель (InhibitLatch) была установлена в «True», она будет оставаться «True» до тех пор, пока двигатель определенно не остановился, что определяют посредством проверки, что двигатель не двигался в течение заданного количества секунд (EngStopDelay), такого как 0,2 с.
Поэтому, чтобы устанавливать триггер равным «True», должны быть удовлетворены условия на этапе 245. Для очистки триггера, то есть, установки его в «False», как только он был установлен в «True», или скорость транспортного средства должна быть высока (на этапе 240), или двигатель 10 остановлен (не вращается в течение EngStopDelay секунд на этапе 248), и больше не удовлетворяются условия на этапе 245.
Если условия на этапе 245 не удовлетворены, и двигатель 10 не превысил пороговое значение EngStopDelay на этапе 248, то способ переходит по направлению «Нет» («N») с этапа 248, и триггер сохраняет свое предыдущее значение. То есть, если триггер был установлен в «True» на этапе 246 в предыдущем цикле выполнения, то он будет оставаться установленным в «True» до тех пор, пока не остановился двигатель 10 (EngStopTmr превышает пороговое значение EngStopDelay), но если триггер раньше имел значение «False», он будет оставаться «False».
Следует отметить, что для первого выполнения способа 200, триггер блокировки устанавливают в «False» на этапе 212, таким образом, триггер всегда имеет «предыдущее» значение, которое он будет сохранять, если способ переходит по направлению «Нет» («N») после этапа 248.
Далее, возвращаясь к этапу 245, когда условия, перечисленные выше, все удовлетворены, триггер блокировки устанавливают в «True» на этапе 246, указывая, что контроллеру 16E двигателя требуется останавливать двигатель или предотвращать запуск двигателя.
С этапа 246, способ переходит на этап 260, на котором проверяют состояние триггера блокировки, и так как состояние было установлено в «True» на этапе 246, способ переходит на этап 290, на котором контроллер 16E двигателя выполнен с возможностью выбора второго режима работы с блокировкой двигателя.
Трогание транспортного средства на этапе 290 может запрещаться, когда триггер блокировки установлен в «True», посредством:
Останова двигателя 10, если он уже работает. Команда останова устанавливается до тех пор, пока скорость вращения двигателя не упала до нуля и не остается нулевой в течение заданного периода времени.
Предотвращения запуска двигателя, если он остановлен на данный момент. Запросы запуска могут инициироваться водителем или системой пуска-останова, но все они блокируются.
Триггер блокировки сбрасывают на этапе 250, таким образом, отменяя запрос блокировки, если скорость вращения двигателя была непрерывно нулевой в течение некоторого периода времени (EngStopDelay), и условия «блокировки привода», перечисленные выше, больше не удовлетворяются, как упомянуто выше со ссылкой на этап 248.
Триггер блокировки также немедленно сбрасывают, если скорость транспортного средства равна или превышает пороговое значение (VehSpdInhMax), как указано переходом с этапа 240 через этапы 250 и 260 на этап 280. Учет скорости транспортного средства в числе условий для установки и очистки триггера, гарантирует, что этот алгоритм не может запрашивать останов двигателя, когда транспортное средство является движущимся включенной передачи, даже если возникли ошибочные условия, такие как сброс программного обеспечения, который устанавливает VehStopTmr в большое значение, в то время как транспортное средство является движущимся.
С этапов 280 и 290, способ переходит на этап 214 и будет продолжаться, чтобы осуществлять цикл через различные этапы до тех пор, пока не происходит событие «выключения зажигания» (не показано на фиг. 3A и 3B), в такой момент способ заканчивается.
Если показатели качества сигнала состояния механической ступеньки или сигнала нейтральной передачи не имеют значение «OK», то система не блокирует трогание транспортного средства. Это используется, чтобы предотвращать зацепление транспортного средства 5 за землю. В этих обстоятельствах, система 16S управления ступенькой по-прежнему может раскладывать и складывать ступеньку в зависимости от скорости транспортного средства и положения двери. Однако если качество сигнала скорости транспортного средства не имеет значение «OK», то таймер, который измеряет, как долго было неподвижным транспортное средство, останавливается. Это предохраняет двигатель 10 от останова системой блокировки привода транспортного средства, если показатель качества скорости транспортного средства изменяется в значение, отличное от «OK», в то время как транспортное средство является движущимся. В ответ на недостоверный сигнал скорости транспортного средства, контроллер 16S ступеньки будет убирать ступеньку при следующей благоприятной возможности.
На этапе 245, как следует заметить, трогание транспортного средства 5 предотвращают, только если таймер остановки транспортного средства (VehStopTmr) превышает пороговое значение (VehStopDelay), и значит, посредством инициализации таймера на этапе 212 большим числовым значением, можно блокировать немедленное трогание после включения зажигания. Если бы таймер остановки транспортного средства (VehStopTmr) инициализировался бы в ноль, было бы можно преодолеть команду блокировки трогания посредством выполнения цикла выключения/включения зажигания.
Посредством приостановки таймера остановки транспортного средства, если сигнал скорости транспортного средства является недостоверным, трогание может предотвращаться, если транспортное средство 5 уже неподвижно, а ступенька разложена, но двигатель 10 не будет останавливаться, если транспортное средство является движущимся. Приостановка таймера остановки транспортного средства выполняется осуществлением перехода по на правлению «Да» («Y») с этапа 214 на этап 220, таким образом, не выполняя инкрементирования на этапе 216 и сброса на этапе 218.
Поэтому, подводя итого вышесказанному, пока полностью не удовлетворено некоторое количество рабочих параметров транспортного средства, как изложено на этапе 245, двигатель 10 не блокируется.
Далее, в частности со ссылкой на фиг. 4A и 4B, показан способ 300, составляющий второй вариант осуществления управления двигателем, в соответствии с изобретением.
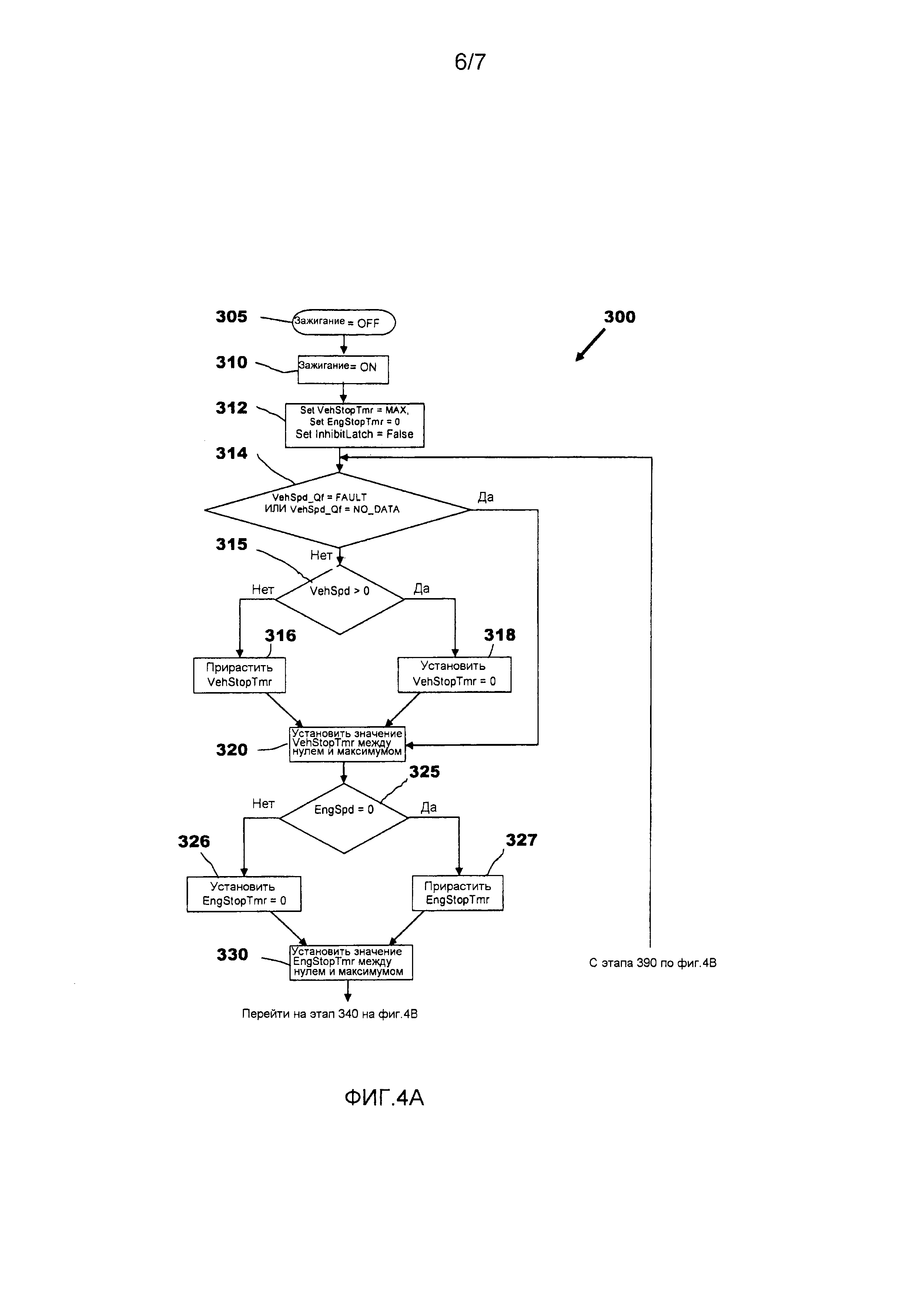
На этапе 305, зажигание моторного транспортного средства 5 отключают, а затем, на этапе 310, зажигание транспортного средства включают (событие включения зажигания).
Затем, на этапе 312, таймер, известный как таймер «остановленного транспортного средства» (VehStopTmr), устанавливают в большое значение, которое будет превышать пороговое значение (VehStopDelay). Таймер остановки транспортного средства используется для регистрации того, как долго транспортное средство было неподвижным. Если скорость транспортного средства больше, чем ноль, таймер (VehStopTmr) устанавливают в ноль, иначе, его инкрементируют в каждом цикле выполнения. Однако если показатель качества скорости транспортного средства указывает, что сигнал скорости транспортного средства недостоверен (VehSpd_Qf = FAULT | NO_DATA), то таймер останавливают, не подвергая ни положительному, ни отрицательному приращению. Приостановка таймера остановки транспортного средства выполняют осуществлением перехода по направлению «Да» («Y») с этапа 314 на этап 320, таким образом, обходя приращение на этапе 316 и сброс на этапе 318.
Значение таймера впоследствии на этапе 320 устанавливают в значение между нулем и максимальным значением для предотвращения его оборачивания по кругу. К тому же, на этапе 312, подобный таймер, таймер «остановленного двигателя» (EngStopTmr) инициализируют нулем, когда включают зажигание. Этот таймер инкрементируется всякий раз, когда скорость вращения двигателя имеет значение ноль, и таймер устанавливается в ноль, когда скорость вращения двигателя не является нулевым.
На этапе 314, определяют, находится ли показатель качества скорости вращения двигателя в значении «Ошибка», или не представлено никаких данных. Если любое из этих условий справедливо, то способ переходит непосредственно на этап 320, иначе, он переходит на этап 315.
На этапе 315, определяют, находится ли скорость транспортного средства выше нуля, если нет, то, на этапе 316, таймер остановки транспортного средства инкрементируют перед переходом на этап 320, тогда как, если скорость транспортного средства находится выше нуля, способ переходит на этап 318, чтобы сбрасывать таймер остановки транспортного средства в ноль перед переходом на этап 320.
На этапе 320, таймер остановки транспортного средства устанавливают в значение в диапазоне между нулем и максимальным допустимым значением для таймера.
Затем, на этапе 325, скорость вращения двигателя проверяют, чтобы видеть, находится ли оно выше нуля, то есть, является ли двигатель 10 работающим на данный момент. Если двигатель 10 является работающим, способ переходит на этап 326, на котором таймер останова двигателя обнуляют, а затем, на этап 330, а если двигатель 10 не является работающим, способ переходит с этапа 325 на этап 327, на котором инкрементируют таймер останова двигателя, а затем, на этап 330.
На этапе 330, таймер останова двигателя устанавливают в значение между нулем и максимальным предельным значением.
С этапа 330 способ переходит на этап 340, на котором проверяют, находится ли скорость транспортного средства ниже верхнего предела скорости транспортного средства, например, такого как 15 км/ч. Если нет, то способ переходит на этап 350, на котором состояние триггера устанавливают в «False», а затем, на этап 360, на котором состояние триггера проверяют. Так как на этапе 350 состояние триггера было установлено в «False», способ переходит с этапа 360 на этап 380, на котором обеспечивают возможность первого, или нормального, режима работы двигателя. То есть, когда скорость транспортного средства находится выше верхнего предела скорости транспортного средства, двигатель 10 никогда не блокируется.
Возвращаясь на этап 340, если скорость транспортного средства находится ниже верхнего предела скорости транспортного средства, способ переходит на этап 345, который является этапом первичного решения способа.
На этапе 345, производится первичное решение, следует ли разрешить или предотвратить трогание транспортного средства.
Следующие условия все должны быть удовлетворены на этапе 345, для блокировки трогания транспортного средства.
Механическая ступенька должна быть не «OFF» и не «STOWED».
И качество сигнала состояния механической ступеньки должно иметь значение «OK»,
И транспортное средство должно быть неподвижным в течение по меньшей мере VehStopDelay секунд,
И передача не должна быть нейтральной, а качество сигнала нейтральной передачи должно иметь значение «OK», или состояние педали сцепления должно быть равным нажатому, а качество сигнала положения сцепления должно иметь значение «OK».
В этом случае, заданное условие работы силовой передачи используется в комбинации с состоянием механической ступеньки. Заданное рабочее состояние силовой передачи является нахождением трансмиссии 11 в нейтральном состоянии ИЛИ нажатием педали сцепления.
Если эти условия не удовлетворены, то способ переходит на этап 348, на котором проверяют, является ли таймер останова двигателя большим, чем предельное значение задержки останова двигателя. Если таймер останов двигателя больше, чем предельное значение задержки останова двигателя, способ переходит на этап 350, на котором триггер блокировки устанавливают в «False», а затем, на этап 360. На этапе 360, проверяют триггер блокировки и, так как на этапе 350 он был установлен в «False», способ затем переходит на этап 380, и трогание транспортного средства разрешают.
Цель задержки (EngStopDelay) на этапе 348 состоит в гарантировании, что, как только команда остановить двигатель (InhibitLatch) была установлена в «True», она будет оставаться «True» до тех пор, пока двигатель определенно не остановился, что определяют посредством проверки, что двигатель не двигался в течение заданного количества секунд (EngStopDelay), такого как 0,2 с.
Поэтому, чтобы устанавливать триггер равным «True», должны быть удовлетворены условия на этапе 345. Для сброса триггера, то есть, установки его в «False», как только он был установлен в «True», или скорость транспортного средства должна быть высока (на этапе 340), или двигатель 10 должен быть остановлен (не вращается в течение EngStopDelay секунд на этапе 348), и больше не удовлетворяются условия на этапе 345.
Если условия на этапе 345 не удовлетворены, и двигатель 10 не превысил пороговое значение EngStopDelay на этапе 348, то способ следует по направлению «Нет» («N») с этапа 348, и триггер сохраняет свое предыдущее значение. То есть, если триггер был установлен в «True» на этапе 346 в предыдущем цикле выполнения, то он будет оставаться установленным в «True» до тех пор, пока не остановился двигатель 10 (EngStopTmr превышает пороговое значение EngStopDelay), но если триггер раньше имел значение «False», он будет оставаться «False».
Отметим, что для первого выполнения способа 300, триггер блокировки устанавливают в «False» на этапе 312, таким образом, триггер всегда имеет «предыдущее» значение, которое он будет сохранять, если способ следует по направлению «Нет» («N») после этапа 348.
На этапе 345, состояние педали сцепления должно быть нажатым, что определяют с использованием проверки, является ли CluPsn большим, чем CluPsnThresh. Где CluPsn = сигнал положения сцепления с датчика 26 педали сцепления, а CluPsnThresh = пороговое значение педали сцепления.
Если CluPsn больше, чем CluPsnThresh, он указывает, что водитель нажимает педаль 25 сцепления. Значение CluPsnThresh в одном из примерных применений изобретения было равным нажатию на 40% полного хода педали сцепления от высвобожденного положения.
Посредством добавления положения сцепления в список условий, которые должны быть удовлетворены для осуществления блокировки двигателя 10, блокировка двигателя 10 потенциально может производиться раньше, чем если бы должно было происходить изменение состояния зацепления. В дополнение, предупреждение могло бы выдаваться водителю, что двигатель будет заблокирован, как только педаль 25 сцепления нажата больше, чем на CluPsnThresh, тем самым, давая водителю благоприятную возможность не выбирать передачу.
В качестве альтернативы этому использованию положения педали сцепления для фактической блокировки двигателя 10, положение педали сцепления могло бы использоваться только для инициирования предупредительного сообщения водителю, а фактическая блокировка тогда выполнялась бы, как описано со ссылкой на фиг. 3A и 3B.
То есть, между этапами 240 и 245, была бы добавлена дополнительная пара этапов. Первый этап для проверки положения педали сцепления, а второй этап для отправления предупреждения водителю. Если результат проверки на первом этапе указывает, что положение CluPsn сцепления превышает CluPsnThresh, то используют второй этап, иначе, способ переходит с первого этапа на этап 245.
Если используют второй этап, способ переходит на этап 245, как описано ранее.
То есть, изменение состояния сцепления с высвобожденного на нажатое могло бы указывать, что трогание неизбежно, предоставляя возможность обеспечения сообщения водителю, если ступенька 17 разложена. Это могло бы предоставлять водителю возможность предпринимать действие для исправления ситуации до того, как возникает блокировка двигателя. Следует принимать во внимание, что полезно избегать необязательных выключений двигателя, так как таковые вызывают дополнительный износ компонентов, а также потенциальное беспокойство у пассажиров и водителя.
Далее, возвращаясь к этапу 345, когда условия, перечисленные выше, все удовлетворены, триггер блокировки устанавливают в «True» на этапе 346, указывая, что контроллеру 16E двигателя требуется останавливать двигатель или предотвращать запуск двигателя.
С этапа 346, способ переходит на этап 360, на котором проверяют состояние триггера блокировки, и так как оно было установлено в «True» на этапе 346, способ затем переходит на этап 390, на котором контроллер 16E двигателя выполнен с возможностью выбора второго режима работы с блокировкой двигателя.
Трогание транспортного средства на этапе 390 запрещают, когда триггер блокировки установлен в «True», посредством:
a) останова двигателя 10, если он уже работает. Команда останова устанавливается до тех пор, пока скорость вращения двигателя не упала до нуля и не остается нулевой в течение предписанного периода времени; и
b) предотвращения запуска двигателя, если он остановлен на данный момент. Запросы запуска могут инициироваться водителем или системой пуска-останова, но все они блокируются.
С этапов 380 и 390, способ переходит на этап 214 и будет продолжаться, чтобы осуществлять цикл через различные этапы до тех пор, пока не происходит событие «выключения зажигания» (не показано на фиг. 4A и 3B), в этот момент способ 300 завершается.
Триггер блокировки сбрасывается посредством этапов 348 и 350, таким образом, отменяя запрос, если скорость вращения двигателя было непрерывно нулевым в течение периода времени (EngStopDelay), и больше не удовлетворены все условия «блокировки привода», перечисленные на этапе 345. Триггер блокировки также немедленно сбрасывается, если скорость транспортного средства равна или превышает пороговое значение (VehSpdInhMax), как указано переходом с этапа 340 на этап 380. Учитывание скорости транспортного средства в числе условий для установки и сброса триггера, гарантирует, что этот алгоритм не может запрашивать останов двигателя, когда транспортное средство является движущимся включенной передачи, даже если возникли ошибочные условия, такие как сброс программного обеспечения, который устанавливает VehStopTmr в большое значение, в то время как транспортное средство является движущимся.
Как описано ранее, если показатели качества сигнала состояния механической ступеньки или сигнала нейтральной передачи не имеют значение «OK», то система не запрещает трогание транспортного средства. Это используется, чтобы предотвращать зацепление транспортного средства 5 за землю. В этих обстоятельствах, система 16S управления ступенькой по-прежнему может раскладывать и складывать ступеньку в зависимости от скорости транспортного средства и положения двери. Однако если качество сигнала скорости транспортного средства не имеет значение «OK», то таймер, который измеряет, как долго было неподвижным транспортное средство, останавливается. Это предохраняет двигатель 10 от останова системой блокировки привода транспортного средства, если показатель качества скорости транспортного средства изменяется не в «OK», в то время как транспортное средство является движущимся. В ответ на недостоверный сигнал скорости транспортного средства, контроллер 16S ступеньки будет убирать ступеньку при следующей благоприятной возможности.
На этапе 345, как следует заметить, трогание транспортного средства 5 предотвращают, только если таймер остановки транспортного средства (VehStopTmr) превышает пороговое значение (VehStopDelay), и значит, посредством инициализации таймера на этапе 212 большим числовым значением, можно запрещать немедленное трогание после включения зажигания. Если бы таймер остановки транспортного средства (VehStopTmr) инициализировался бы на ноле, было бы можно преодолеть команду запрета трогания посредством выполнения цикла выключения/включения зажигания.
Посредством приостановки таймера остановки транспортного средства, если сигнал скорости транспортного средства является недостоверным, трогание может предотвращаться, если транспортное средство 5 уже неподвижно, а ступенька 17 разложена, но двигатель 10 не будет останавливаться, если транспортное средство 5 является движущимся.
Поэтому, подводя итог вышесказанному, пока полностью не удовлетворено некоторое количество условий работы транспортного средства и силовой передачи, как изложено на этапе 345, двигатель 10 не блокируется
Специалистам в данной области техники следует принимать во внимание, что, хотя изобретение было описано в качестве примера со ссылкой на один или более вариантов осуществления, оно не ограничено раскрытыми вариантами осуществления, и что альтернативные варианты осуществления могли бы быть созданы, не выходя из объема изобретения, как определено в прилагаемой формуле изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)

