Результат интеллектуальной деятельности: Устройство управления вектором тяги плазменного двигателя (варианты) и способ управления вектором тяги плазменного двигателя
Вид РИД
Изобретение
Группа изобретений относится к плазменной технике и преимущественно предназначено для использования в космической технике в качестве исполнительного органа электрореактивной двигательной установки. Изобретение относится к электрическим ракетным двигателям (ЭРД), применяемым на космических аппаратах, в частности, к стационарным плазменным двигателям (СПД) - двигателям Морозова.
Такие двигатели предназначены, в основном, для применения при движении в условиях космоса. В качестве источников ионов или плазмы они также используются в технологии для ионной обработки поверхности материала. Благодаря высокой скорости истечения рабочего тела или их высокому удельному импульсу тяги (от 1500 до 6000 с) они позволяют более эффективно решать целый ряд задач управления движением космических аппаратов в сравнении с химическими реактивными двигателями.
СПД характеризуются низкой энергетической ценой тяги за счет создания условий, благоприятных для ионизации рабочего тела, при этом создаваемый ими ионный поток квазинейтрален, что снимает ограничения величины плотности ионного тока за счет действия объемного заряда. В связи с этим такой плазменный двигатель может работать в широком диапазоне ускоряющих напряжений. Ионный ток в современных моделях плазменных ускорителей такого типа близок к разрядному и определяется лишь величиной массового расхода рабочего тела. Таким образом, в известных СПД, в отличие от ионных, имеется возможность независимо изменять массовый расход и ускоряющее напряжение, то есть тягу и скорость истечения при высоком КПД двигателя.
Такие двигатели описаны в RU 152775 и 2527898, US 4703222.
Система управления движением космического аппарата (КА) на околоземной орбите должна решать две основные динамические задачи: поддержание расчетных параметров орбиты космического аппарата (КА) и обеспечение требуемой его ориентации.
Теоретически вектор тяги СПД должен в обязательном порядке располагаться на продольной оси, проходящей через центр инерции КА. В этом случае при работе двигателя отсутствуют крутящий момент силы, отклоняющий КА от прямолинейной траектории и формирующий его закручивание. В реальности, при установке СПД на КА обеспечить полное достижение прохождения вектора тяги СПД через центр тяжести КА невозможно, так как это зависит от большого количества конструктивных и сборочных особенностей. Кроме того, центр инерции КА может изменять свое положение при выработке рабочего тела и по другим причинам. В результате, в отношении СПД считается, в рамках допусков и технологических отклонений, что вектор тяги практически лежит на продольной оси, проходящей через центр инерции КА. Даже небольшие отклонения приводят к тому, что при работе СПД на КА на последнем формируется закручивающий КА момент, который необходимо скорректировать, то есть устранить.
Согласно практически установленным требованиям устройство управления вектором тяги должно обеспечивать отклонение вектора тяги от продольной оси двигателя на угол до 5-7° с дискретностью в 1°. Устройство должно позволять изменять и устанавливать вектор тяги двигателя в заданном азимутальном направлении с дискретностью изменения угла по азимуту не более 20°.
В статье «Управление направлением вектора тяги электроракетной двигательной установки при размещении двигателей по схеме «звезда»», авторы Обухов В.А., Покрышкин А.И. Яшина Н.В. // «Космонавтика и ракетостроение», 2008 г., №3, стр. 51-58, ЦНИИмаш 2008, описан метод управления движения центра масс КА с помощью электрореактивных двигателей, расположенных по схеме «звезда». Эта схема реализована из шести СПД, расположенных равномерно по окружности через 60° равномерно по радиусу.
Этот способ защищен RU 2309876, B64G 1/26, опубл. 10.11.2007. В этом патенте способ управления движением космического аппарата, заключающийся в управлении движением центра масс КА и в управлении угловой ориентацией КА в пространстве, включающий управляющее воздействие на космический аппарат посредством включения по крайней мере одного реактивного двигателя малой тяги (двигатели типа СПД-140 с двумя режимами работы) двигательной установки КА, создающего вектор тяги и управляющие моменты тяги относительно трех главных ортогональных осей инерции КА, управляющие воздействия создают с помощью двигателей малой тяги, располагаемых в общей установочной плоскости корпуса КА, ортогональной одной из его главных осей инерции, с угловым смещением α между близлежащими двигателями относительно главной оси инерции КА, ортогональной установочной плоскости двигателей, в секторах указанной плоскости, в которых не установлено оборудование, препятствующее размещению двигателей, при этом величину α выбирают из условия (360°-β)/(N+1)≤β≤(360°-β)/(N-1), где N - количество двигателей малой тяги, которое выбирают из условия N≥5; β - суммарный центральный угол секторов установочной плоскости, в которых установлено оборудование, препятствующее размещению двигателей малой тяги, причем для создания управляющего воздействия используют двигатели малой тяги с изменяемыми направлениями векторов тяги относительно установочной плоскости двигателей и изменяемыми направлениями векторов тяги в плоскости, совпадающей или параллельной установочной плоскости двигателей, и установленные так, что линии векторов тяг двигателей могут находиться в одной плоскости и пересекать главную ось инерции космического аппарата, ортогональную установочной плоскости двигателей.
При этом используют двигатели малой тяги, каждый из которых выполнен с возможностью независимого поворота вектора тяги относительно ортогональных осей поворота во взаимно противоположных направлениях, а управляющее воздействие создают посредством одновременного включения двух или трех двигателей малой тяги, линии векторов тяг которых расположены на ближайшем расстоянии друг от друга, при условии, что направление управляющего воздействия находится между включаемыми двигателями. Управляющее воздействие создают при расположении векторов тяг двигателей в плоскости, пересекающей центр масс космического аппарата.
Из этого же источника известно устройство управления движением КА, включающее в свой состав блок навигации, блок законов управления движением центра масс и угловой ориентацией КА в пространстве, двигательную установку, содержащую двигатели малой тяги, создающие векторы тяги и управляющие моменты тяги относительно трех главных ортогональных осей инерции КА, двигательная установка содержит по меньшей мере пять двигателей малой тяги, расположенных в общей установочной плоскости корпуса КА, ортогональной одной из его главных осей инерции, с угловым смещением между близлежащими двигателями относительно главной оси инерции космического аппарата, ортогональной установочной плоскости двигателей, в секторах указанной плоскости, в которых не установлено оборудование, препятствующее размещению двигателей, причем двигатели малой тяги выполнены с изменяемыми направлениями векторов тяги относительно установочной плоскости двигателей и изменяемыми направлениями векторов тяги в плоскости, совпадающей или параллельной установочной плоскости двигателей, и установлены так, что линии векторов тяг двигателей могут находиться в одной плоскости и пересекать главную ось инерции космического аппарата, ортогональную установочной плоскости двигателей.
Каждый из двигателей малой тяги размещен в установочной плоскости корпуса КА на кардановом подвесе, обеспечивающем две степени свободы двигателя с целью изменения пространственного положения вектора тяги относительно двух взаимно ортогональных осей поворота. Приводы поворота двигателей малой тяги позволяют независимо от других двигателей осуществлять изменение направления вектора каждого двигателя относительно двух ортогональных осей поворота во взаимно противоположных направлениях.
Управляющее воздействие, приложенное к КА, создается посредством включения, по меньшей мере, одного двигателя малой тяги, входящего в состав двигательной установки. Выбранный двигатель малой тяги создает вектор тяги и/или управляющие моменты тяги относительно трех главных ортогональных осей инерции КА. Данная операция управлением движения КА возможна в случае совпадения направления управляющего воздействия, рассчитанного блоком законов управления центра масс и угловой ориентацией КА, с одним из дискретных направлений вектора тяги двигательной установки. В противном случае необходим предварительный разворот КА до совмещения направления управляющего воздействия с ближайшим дискретным направлением вектора тяги двигательной установки.
Недостаток данного способа и реализующего его устройства заключается в сложности конструктивного исполнения, увеличенном количестве двигателей малой тяги, наличием алгоритмического комплекса для управлении угловой ориентацией КА в пространстве, включающем управляющее воздействие на КА посредством включения, по крайней мере, одного реактивного двигателя малой тяги двигательной установки КА, создающего вектор тяги и управляющие моменты тяги относительно трех главных ортогональных осей инерции КА.
В патентах WO 2015082729 (опубликовано 06.11.2015), SU 1839789 (статус патента на 07.12.2016 не определен) и RU 2445510 (опубликовано: 20.03.2012) устройство управления вектором тяги плазменного двигателя, характеризующееся тем, что содержит закрепляемые на корпусе плазменного двигателя в зоне за срезом его выходного канала, 1-4 магнитные катушки (генераторы магнитного поля) для отклонения от оси двигателя существующего за его срезом магнитного поля, созданного магнитными катушками двигателя. В патенте WO 2015082729 система отклонения вектора тяги (ОВТ) включает в себя расположенные на выходе из двигателя малой тяги, соосно с ним, три или более магнитные катушки, оси которых направлены под углом к оси двигателя. В патентах SU 1839789 и RU 2445510 оси магнитных катушек системы ОВТ направлены перпендикулярно оси двигателя. В этих патентах описан способ, включающий в себя выбор величины электрического тока в каждой из катушек так, чтобы отклонить от оси двигателя ось магнитного сопла на нужный угол.
Решение RU 2445510 выбрано в качестве прототипа для заявленных объектов.
Недостаток известных устройств, в частности устройства патента RU 2445510, заключается в том, что магнитное поле катушек ОВТ отклоняет ось магнитного поля двигателя. Нарушение конфигурации (осевой симметрии) магнитного поля сопла (или разрядной камеры) двигателя всегда сопровождается снижением кпд двигателя и увеличением скорости распыления сопла (или разрядной камеры) ускоренными ионами, так как в этом случае ускоряющее ионы электрическое поле тоже отклоняется от оси и поток ионов на стенку увеличивается. Экспериментальная проверка эффективности системы ОВТ, предложенной в указанных патентах для СПД, показала, что с помощью этих устройств можно отклонить вектор тяги на угол до 3,5° (для устройства, описанного в патенте WO 2015082729) и на угол 1°-2° для устройств, описанных в патентах RU 2445510 и SU 1839789). Таким образом, с помощью известных устройств отклонить вектор тяги в СПД на требуемый угол 5° не удается.
Настоящее изобретение направлено на достижение технического результата, заключающегося в изменении конструкции магнитных катушек устройства ОВТ, обеспечивающей отклонение вектора плазменного потока в СПД на требуемый угол, и упрощении способа достижения этого отклонения.
Указанный технический результат достигается тем, что в устройстве управления вектором тяги магнитные катушки, закрепляемые на корпусе плазменного двигателя в зоне за срезом его выходного канала, выполнены в виде двух прямоугольной формы рамочных магнитных катушек, расположенных открытыми частями рамок напротив друг друга симметрично относительно продольной оси двигателя параллельно друг другу или под небольшим углом друг к другу.
Указанный технический результат достигается тем, что в устройстве управления вектором тяги магнитные катушки, закрепляемые на корпусе плазменного двигателя в зоне за срезом его выходного канала, выполнены в виде первых двух прямоугольной формы рамочных магнитных катушек, расположенных открытыми частями рамок напротив друг друга, симметрично относительно продольной оси двигателя, параллельно друг другу или под небольшим углом друг к другу, и вторых двух прямоугольной формы рамочных магнитных катушек, расположенных открытыми частями рамок напротив друг друга, симметрично относительно продольной оси двигателя, и параллельно друг другу или под небольшим углом друг к другу, первая пара рамочных магнитных катушек размещена перпендикулярно рамочным магнитным катушками второй пары и все магнитные катушки расположены на одинаковом расстоянии от продольной оси, плазменного двигателя.
Указанный технический результат так же достигается тем, что способ управления вектором тяги плазменного двигателя заключается в том, что изменение вектора плазменного потока двигателя в направлении, перпендикулярном вектору плазменного потока, осуществляют путем формирования за срезом плазменного двигателя однородного по объему плазменной потока магнитного поля, направленного поперек вектора плазменного потока плазменного двигателя.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретными примерами исполнения, которые, однако, не являются единственно возможными, но наглядно демонстрируют возможность достижения требуемого технического результата.
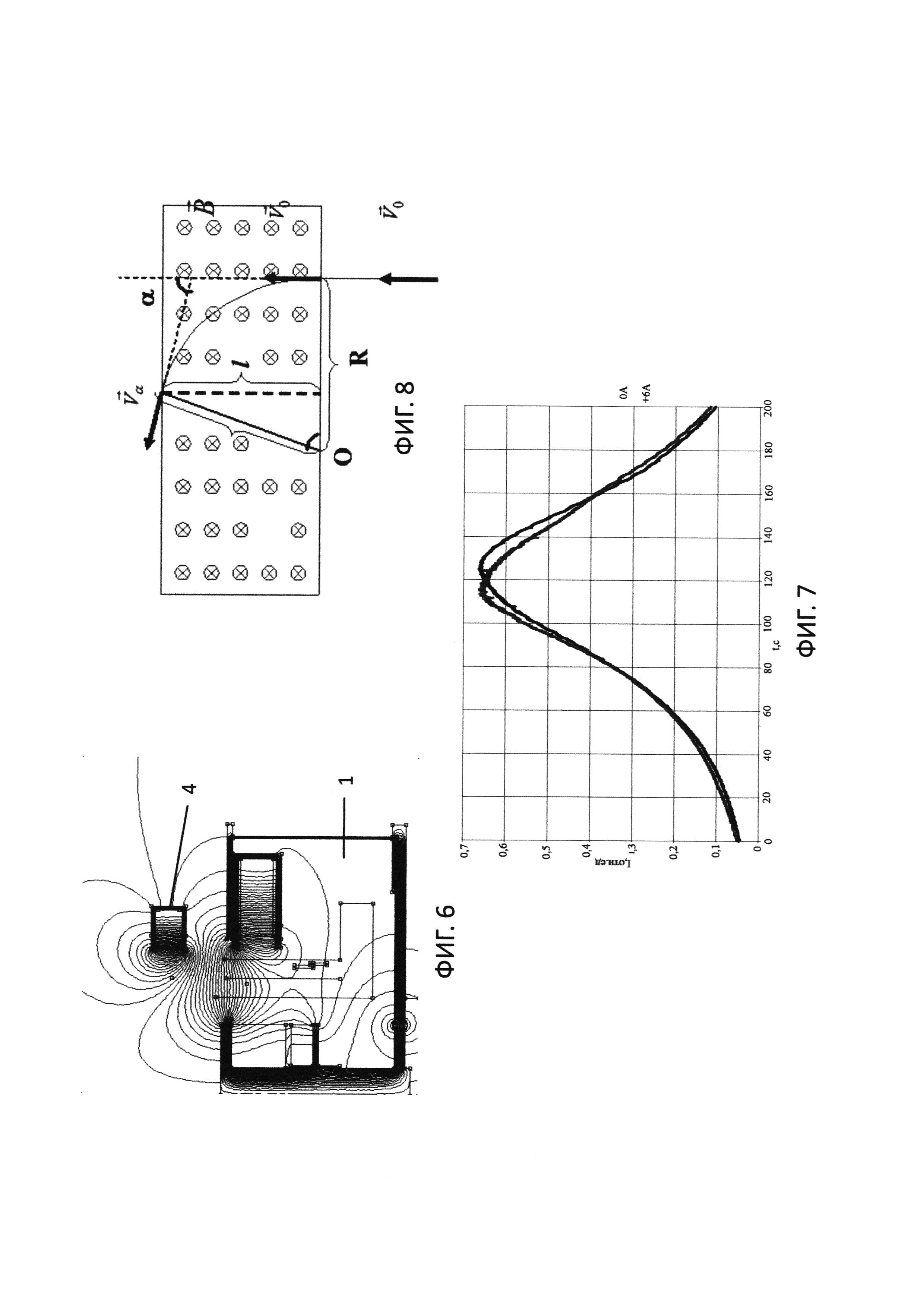
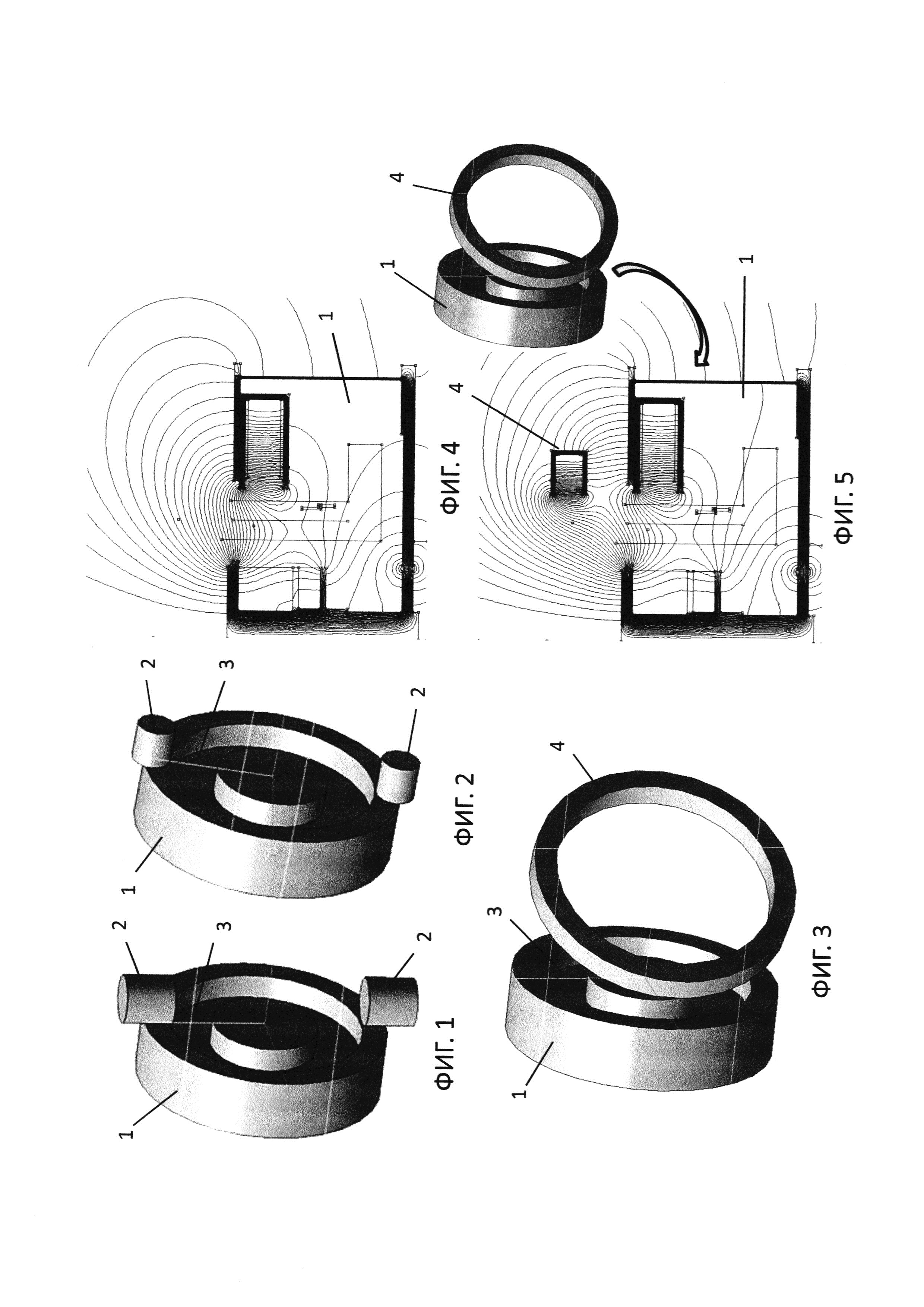
На фиг. 1 - СПД (1) с расположением малых парных магнитных катушек (2) относительно двигателя, первый пример расположения, ось парных магнитных катушек перпендикулярна направлению потока плазмы вдоль центральной оси СПД, как в патенте RU2445510;
фиг. 2 - СПД (1) с расположением малых парных магнитных катушек (2) относительно двигателя, второй пример расположения, оси парных магнитных катушек параллельны направлению потока плазмы вдоль центральной оси СПД;
фиг. 3 - СПД (1) с одной большой катушкой (4), плоскость которой ориентирована под углом 30° относительно центральной оси СПД, как в патенте WO2015082729;
фиг. 4 - показана конфигурация силовых линий магнитного поля источника α-100М1, соответствующая выходящему плазменному потоку в форме конуса из СПД (без катушек);
фиг. 5 представлена конфигурация силовых линий результирующего магнитного поля источника α-100.М1 и большой катушки, расположенной на расстоянии 1,5 см от среза источника;
фиг. 6 - представлена конфигурация силовых линий результирующего магнитного поля источника α-100.М1 и большой катушки, расположенной на расстоянии 1,5 см от среза источника, при изменении направления тока в ней на обратное;
фиг. 7 - график, демонстрирующий экспериментально полученный сдвиг профилей ионного тока струи двигателя с различным направлением тока в парных магнитных катушках,
фиг. 8 - показано движение положительно заряженного иона в области однородного магнитного поля, протяженностью l;
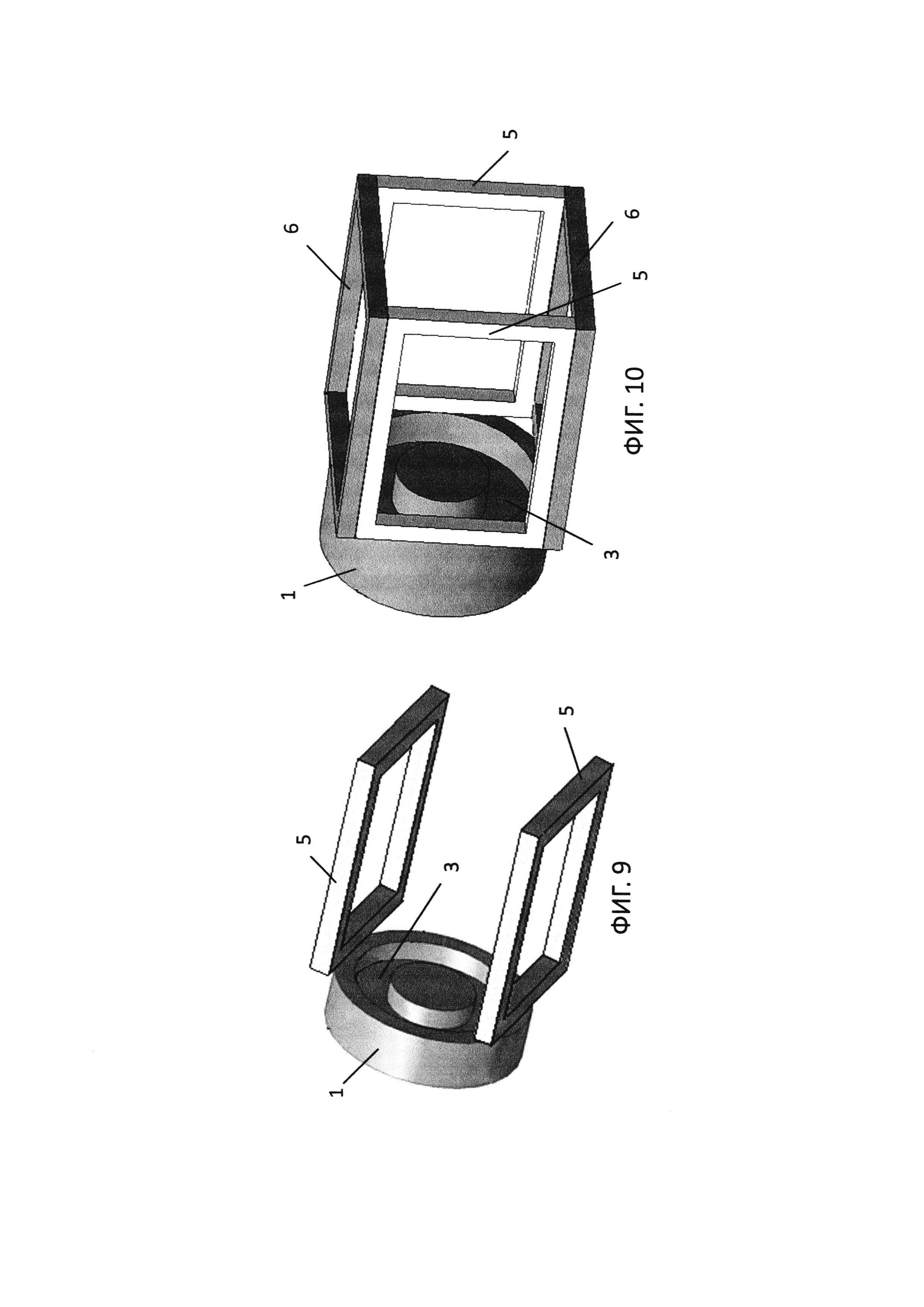
фиг. 9 - схема расположения двойной параллельной прямоугольной отклоняющей системы относительно СПД (две параллельные катушки (5) отклонения вектора тяги по оси Y), а также расположение прямоугольных катушек (7) под небольшим углом 2β друг к другу;
фиг. 10 - схема расположения четырех отклоняющих магнитных катушек относительно СПД (две параллельные катушки отклонения вектора тяги по оси Y (5) и две параллельные катушки отклонения вектора тяги по оси X (6).
Согласно настоящему изобретению рассматривается конструкция устройства, обеспечивающего магнитное отклонение вектора тяги СПД (для экспериментов использовалась модель СПД α-100.М1) за счет создания дополнительного магнитного поля, взаимодействующего с собственным магнитным полем СПД (у его среза).
Для данной серии экспериментов использовался следующий метод измерения угла поворота вектора тяги. Расчет угла поворота вектора тяги проводился по полученным профилям ионного тока на цилиндрический зонд диаметром 1 мм, установленным на координатном устройстве на некотором расстоянии за срезом двигателя. Передвижение зонда осуществлялось в плоскости, перпендикулярной центральной оси двигателя. Определялась координата смещения центра тяжести профиля ионного потока струи модели с включенной магнитной отклоняющей системой и без нее. Затем рассчитывался угол отклонения струи с учетом расстояния зонда от среза модели.
Серия опытов для получения подтверждения возможности обеспечения магнитного отклонения вектора тяги СПД 1 (в исполнении, описанном в RU 152775 и 2527898, модель СПД α-100.М1) проводилась с использованием двух малых парных катушек 2, закрепляемых на корпусе СПД у выходного канала 3 двигателя.
При экспериментах на наружном внешнем магнитном полюсе СПД располагались дополнительные магнитные катушки 2, создающие локальную асимметрию в выходной области плазменного потока (фиг. 1 и 2). Короткие катушки 2 устанавливались парами и располагались под углом 180° относительно друг друга, в плоскости, перпендикулярной центральной оси двигателя. Расположение и конструкция магнитных катушек полностью соответствовали патенту RU 2445510. На фиг. 1 продольные оси малых катушек соосны, а на фиг. 2 продольные оси малых катушек расположены параллельно друг другу и продольной оси СПД.
С помощью зонда, размещенного на координатном устройстве, были получены профили ионного тока в сечении z=20 и z=32 см от среза модели двигателя. Перемещение зонда осуществлялось в горизонтальной плоскости, в которой и располагались катушки при проведении эксперимента. Профиль ионного тока, измеренный в номинальном режиме двигателя (ток катушек Ik=0A), сравнивался с профилем, полученным при различных токах в дополнительных коротких катушках (Ik = ±5А, ±10А). Магнитная индукция одной короткой катушки составила 1.7*10-2 Тл для тока 10А и 0.85*10-2 Тл для тока 5А, измеренная по центру с боку катушки (для случая расположения катушек по фиг. 2). Магнитная индукция катушки, измеренная по оси, в торце ее составила 3.2*10-2 Тл для тока 10А и 1.7*10-2 Тл при токе 5А (для случая расположения катушек по фиг. 1). Эксперименты с использованием малых парных катушек позволили установить возможность реализации магнитного отклонения вектора тяги СПД за счет создания дополнительного магнитного поля, взаимодействующего с собственным магнитным полем СПД (у его среза). Но расчет угла поворота вектора тяги показал его незначительную величину в пределах 1-2 градусов, не зависящую от направления тока в катушках, при этом отклонение плазменного потока происходило только в одном направлении.
Для более эффективного отклонения плазменной струи двигателя СПД были проведены эксперименты с использованием кольцевой одиночной катушки 4 (фиг. 3). Расположение и конструкция магнитной катушки полностью соответствовала патенту WO 2015082729. Геометрические размеры катушки рассчитаны из условия минимального веса и создания достаточной величины магнитного поля. Так при внутреннем диаметре одиночной катушки 107 мм, ширине 10 мм и высоте 16 мм в катушке было намотано 80 витков. Плоскость катушки ориентировалась под углом 30 относительно центральной оси СПД.
Силовые линии магнитного поля двигателя модели СПД α-100.M1 без включенной дополнительной катушки изображены на фиг. 4. При включении такой магнитной катушки 4 вблизи среза модели двигателя по выходному его каналу возникало перераспределение магнитного поля двигателя и катушки (фиг. 5 и 6). На фиг. 5 показана конфигурация силовых линий результирующего магнитного поля источника СПД α-100.М1 и катушки 4, расположенной на расстоянии 1,5 см от среза источника (у выходного канала СПД). На фиг. 6 представлена конфигурация силовых линий результирующего магнитного поля источника СПД α-100.М1 и катушки 4, расположенной на расстоянии 1,5 см от среза источника, при изменении направления тока в катушке 4 на обратное.
В результате проведенных экспериментов получено отклонение вектора тяги СПД в пределах 1-3°. Меняя полярность включения кольцевой катушки 4 и, подбирая токи в ней, получали оптимальную величину магнитного поля. В этой серии экспериментов удалось изменять вектор тяги с шагом в (1±0,25)° в пределах до 3,5° (фиг. 7).
При этом наблюдалось незначительное воздействие на режим работы СПД. При удаленном расположении данной катушки 4 от двигателя - (ближний край катушки z=5 см) взаимное влияние уменьшалось, но и величина отклонения вектора тяги также уменьшалась до значения ~2°. Токи в катушках - как входные параметры изменялись в диапазоне от - 6 А до + 6 А. Максимальное отклонение вектора тяги соответствует максимальному току в катушке 4. Приведенные на графике по фиг. 7 профили кривых получены зондом на расстоянии z=20 см от среза модели (от выходного канала СПД). Таким образом экспериментально показано, что эффективность устройств ОВТ, предложенных в патентах WO 2015082729 и RU 2445510, недостаточна для отклонения вектора тяги двигателя на требуемый угол 5-7 градусов.
Простейшим магнитным полем, отклоняющим заряженные частицы на заданный угол, является область однородного магнитного поля. Для проведения предварительных оценок получим формулу для угла отклонения заряженной частицы в этом случае. Пусть положительно заряженный ион, несущий заряд q и имеющий массу m, влетает с начальной скоростью  в область однородного магнитного поля, протяженностью l, перпендикулярно вектору магнитной индукции
в область однородного магнитного поля, протяженностью l, перпендикулярно вектору магнитной индукции  (фиг. 8). Находясь в магнитном поле, ион движется по окружности радиуса R, так что за время движения в магнитном поле он описывает дугу окружности, опирающуюся на центральный угол α. Поскольку вектор скорости направлен по касательной к траектории движения иона и перпендикулярен к радиусу окружности, то вектор скорости также испытывает поворот на угол α. В силу квазинейтральности плазмы малоинерционные электроны будут «увлекаться» массивными ионами, обеспечивая тем самым поворот на заданный угол всего плазменного потока. Задавая угол отклонения α и исходя из необходимых значений длины области, можно получить оценку для величины магнитного поля. Многочисленные эксперименты и наблюдения показывают, что выходящий из источника плазменный поток является наиболее сформированным на расстоянии одного-двух калибров от источника.
(фиг. 8). Находясь в магнитном поле, ион движется по окружности радиуса R, так что за время движения в магнитном поле он описывает дугу окружности, опирающуюся на центральный угол α. Поскольку вектор скорости направлен по касательной к траектории движения иона и перпендикулярен к радиусу окружности, то вектор скорости также испытывает поворот на угол α. В силу квазинейтральности плазмы малоинерционные электроны будут «увлекаться» массивными ионами, обеспечивая тем самым поворот на заданный угол всего плазменного потока. Задавая угол отклонения α и исходя из необходимых значений длины области, можно получить оценку для величины магнитного поля. Многочисленные эксперименты и наблюдения показывают, что выходящий из источника плазменный поток является наиболее сформированным на расстоянии одного-двух калибров от источника.
Рассмотрение различных систем катушек с током показывает, что простейшей конфигурацией, создающей область заданных размеров, в которой можно обеспечить однородность магнитного поля в пределах заданных отклонений и по которой может свободно распространяться выходящий из источника плазменный поток, является совокупность как минимум двух прямоугольных катушек 5, расположенных в параллельных плоскостях. Такое устройство показано на фиг. 9. Располагая эти катушки 5 в горизонтальных плоскостях, параллельных плоскости Z-Y, симметрично по отношению к оси плазменного источника, можно создать необходимую вертикальную (по оси X) составляющую магнитного поля, обеспечивающую поворот плазменного потока вправо или влево (по оси Y) от оси источника (Z) в зависимости от направления тока в этих катушках. То же самое явление происходит при расположении катушек 5 в вертикальных плоскостях симметрично по отношению к оси плазменного источника, в этом случае можно создать необходимую горизонтальную составляющую магнитного поля, обеспечивающую поворот плазменного потока вверх или вниз от оси источника в зависимости от направления тока в этих катушках.
Предварительные расчеты были выполнены с катушками различных размеров в приближении, когда ширина намотки мала по сравнению с их геометрическими размерами (то есть в приближении тонких катушек). Выбор размеров системы из таких катушек соответствовал выходящему из источника СПД α-100.M1 плазменному потоку. Длина рамки составила 14 см, ширина рамки - 11 см, расстояние между плоскостями рамок - 11 см. Возникающее между рамками магнитное поле имеет в центральном сечении область длиной 5 см, на протяжении которой неоднородность поля лежит в пределах 2,5% (достигая максимума в срединном сечении рамок). На границе рамок поле спадает примерно в два раза, и убывает на порядок уже на 2 см от края рамок за их пределами.
Исходя из проведенных оценок и расчетов, для проведения испытаний были намотаны две прямоугольной формы рамочные катушки, имеющие по 200 витков проволоки каждая (в несколько слоев). Катушки располагались под небольшим углом 2β друг к другу и к горизонту, симметрично по отношению к выходящему из источника плазменному потоку. Такое расположение магнитных катушек уменьшает перехват ускоренных ионов конструкцией катушек, так как плазменный поток, выходящий из двигателя, слабо расходится от оси. Направление вектора тяги определялось по профилю ионного тока на зонд. Зонд располагался на координатном устройстве и перемещался перпендикулярно оси закрепленного двигателя. Измерения проводились на разных расстояниях от среза двигателя (Z=32 см и Z=40 см от среза модели). При использовании дополнительного магнитного поля для поворота вектора тяги измерялась зависимость угла поворота от величины тока в магнитных катушках, создающего это поле. В результате создания устройства управления вектором тяги с помощью магнитного поля был получен угол отклонения вектора тяги ±5° с шагом в 1°.
При использовании способа управления вектором тяги плазменного двигателя путем формирования за срезом плазменного двигателя однородного по объему плазменной потока магнитного поля, созданного за счет использования двойной прямоугольной катушки и направленного поперек вектора плазменного потока плазменного двигателя,
можно отметить:
1. Было экспериментально определено направление силовых линий магнитного поля в такой системе катушек и показано, что отклонение плазменной струи двигателя при заданном направлении магнитного поля соответствует отклонению положительно заряженных ионов ксенона. При смене полярности магнитного поля отклонение плазменной струи меняется на противоположное. Зависимость угла поворота плазменной струи от величины магнитного поля близка к линейной.
2. Обнаружено незначительное влияние на режим работы модели при проведении экспериментов по повороту вектора тяги СПД.
Как вариант, возможно оснащение СПД одновременно и горизонтально и вертикально размещаемыми парами прямоугольной формы рамочными катушками 5 и 6, как это показано на фиг. 10. В этом случае система катушек сформирована из катушек 5, расположенных в горизонтальных плоскостях симметрично по отношению к оси плазменного источника (создается вертикальная составляющая магнитного поля, обеспечивающая поворот плазменного потока вправо или влево от оси источника в зависимости от направления тока в этих катушках), и из катушек 6, расположенных в вертикальных плоскостях симметрично по отношению к оси плазменного источника (в этом случае можно создать необходимую горизонтальную составляющую магнитного поля, обеспечивающую поворот плазменного потока вверх или вниз от оси источника в зависимости от направления тока в этих катушках). Одновременное включение двух пар магнитных катушек позволяет отклонять вектор тяги в любом направлении по азимуту от оси СПД.
Стационарный плазменный двигатель малой мощности
Способ плазменного осаждения полимерных покрытий и способ генерации плазмы
Стационарный плазменный двигатель малой мощности
Плазменный ускоритель с замкнутым дрейфом электронов
Мультипольная магнитная ловушка для плазмы

