ГИБОЧНАЯ МАШИНА ДЛЯ ГИБКИ ПРОФИЛЕЙ, МЕТАЛЛИЧЕСКИХ ЛИСТОВ И Т.П.
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к гибочной машине для гибки профилей, металлических листов и т.п. и, в частности, к гибочной машине такого типа, которая содержит три валка с параллельными осями, которые могут перемещаться относительно друг друга для образования криволинейной траектории, имеющей требуемый радиус кривизны, материала, подлежащего гибке (профиля или металлического листа) и перемещаемого вдоль этой криволинейной траектории между тремя валками.
Уровень техники
В гибочных машинах вышеуказанного типа три валка приводятся во вращение с одинаковой угловой скоростью, каждый вокруг собственной оси вращения, совпадающей с его собственной геометрической осью. Обычно положение оси одного из трех валков (именуемого далее как «неподвижный валок») является фиксированным, в то время как оси двух других валков (именуемых далее как «подвижные валки») могут перемещаться относительно друг друга и каждый относительно оси неподвижного валка для изменения радиуса кривизны криволинейной траектории материала, подлежащего гибке. В этой связи существуют способы изменения относительного положения осей валков.
Например, в гибочной машине, известной из ЕР 0919302, каждый из двух подвижных валков поддерживается на соответствующем наклоняемом плече, которое приводится в действие соответствующим гидравлическим исполнительным механизмом или цилиндром для наклона относительно неподвижной оси вращения. Такое известное решение не позволяет регулировать относительное положение осей валком в широком диапазоне, поскольку ось каждого подвижного валка может перемещаться только по дуге окружности, центр которой совпадает с центром наклона соответствующего наклоняемого плеча.
Похожее решение известно из документа WO 2008/102388 (на котором основана вступительная часть приложенного независимого п. 1 формулы изобретения), в котором также предусматривается возможность перемещения оси вращения каждого из двух наклоняемых плеч в вертикальном направлении. Для этого каждое из двух наклоняемых плеч шарнирно крепится к гайке линейного исполнительного устройства винт-гайка, винт которого имеет собственную ось, ориентированную вертикально. Если, с одной стороны, это другое известное решение обеспечивает более широкий диапазон регулирования относительного положения осей валков, поскольку оно предлагает степень свободы поступательного перемещения оси вращения каждого наклоняемого плеча в дополнение к степени свободы вращения наклоняемых плеч, с другой стороны, оно имеет пониженную жесткость, поскольку наклоняемые плечи шарнирно крепятся не к частям конструкции машины, а к исполнительным устройствам, которые, как понятно, не могут обеспечить опору, имеющую такую же жесткость, как жесткость части конструкции машины. Таким образом, такое известное решение для регулирования положения осей не может использоваться в крупногабаритных гибочных машинах, где требуется прикладывание высоких изгибающих усилий.
Раскрытие изобретения
Таким образом, задача настоящего изобретения состоит в том, чтобы предложить гибочную машину вышеуказанного типа, которая позволяет регулировать относительное положение осей валков в широком диапазоне относительных положений и которая также может использоваться для операций гибки, которые требуют прикладывания значительных усилий, например, для гибки металлических листов большой толщины или гибки профилей с большим сечением.
Эта и другая задачи полностью решаются по настоящему изобретению с помощью гибочной машины, имеющей отличительные признаки, указанные в отличительной части независимого п. 1 приложенной формулы изобретения.
Преимущественные варианты выполнения изобретения являются предметом зависимых пунктов формулы изобретения, содержание которых должно рассматриваться как неотъемлемая и составная часть приведенного ниже описания.
Вкратце, изобретение основано на идее поддержки с возможностью скольжения каждого из двух подвижных валков на соответствующем наклоняемом плече и шарнирного соединения каждого наклоняемого плеча с конструкцией машины относительно соответствующей неподвижной оси вращения. Ось каждого подвижного валка может вращаться совместно с соответствующим наклоняемым плечом вокруг оси вращения наклоняемого плеча и перемещаться в прямолинейном направлении, которое является фиксированным относительно соответствующего наклоняемого плеча. Это позволяет получить гибочную машину с высокой гибкостью эксплуатации. Кроме того, с помощью подвижных валков, поддерживаемых наклоняемыми плечами, шарнирно соединенными с конструкцией машины относительно соответствующих неподвижных осей вращения, гибочная машина по изобретению также может использоваться для применений, где требуются высокие усилия гибки. Другим преимуществом является то, что гибочную машину по изобретению можно разбирать на три части, а именно, неподвижный валок с соответствующей опорной конструкцией и два подвижных валка с соответствующими наклоняемыми плечами и соответствующими исполнительными устройствами, и, таким образом, легко транспортировать даже в случае больших размеров машины.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения станут понятыми из приведенного ниже описания, представленного только в качестве неограничивающего примера, со ссылкой на приложенные чертежи, на которых:
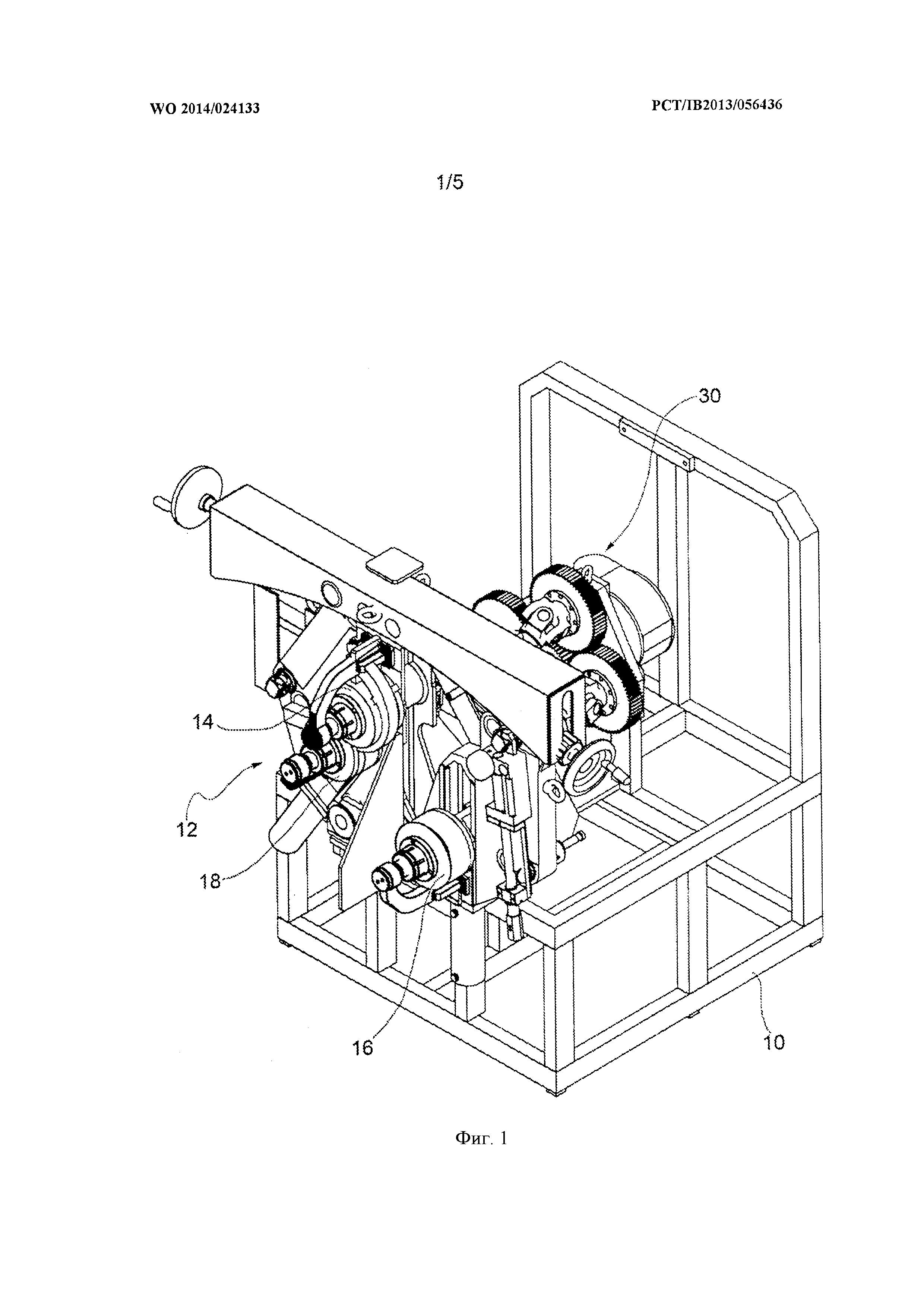
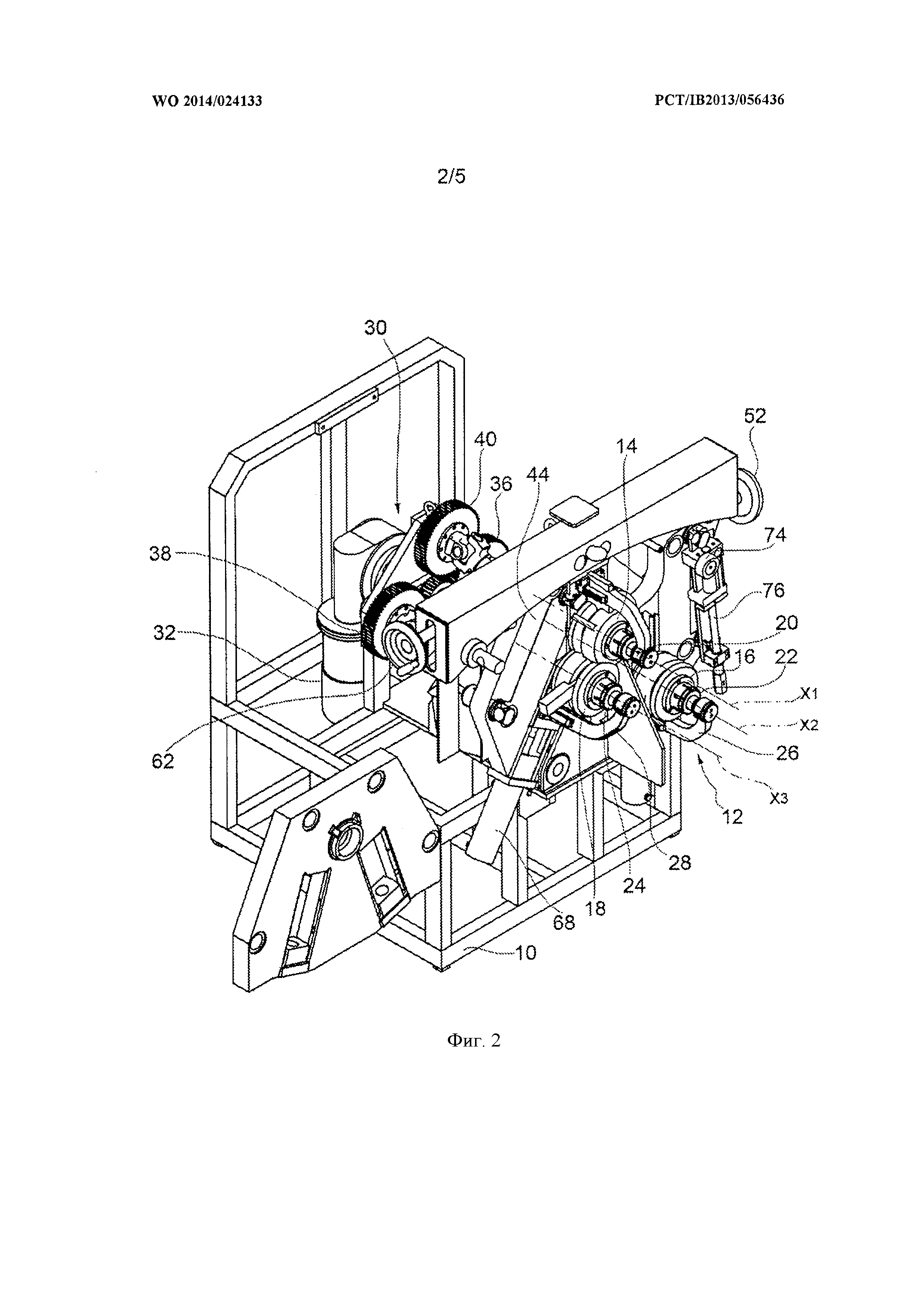
Фиг. 1 и 2 - перспективные виды с различных точек наблюдения гибочной машины по варианту выполнения настоящего изобретения, с которой был удален наружный кожух для показа регулировочного механизма для регулирования положения валков;
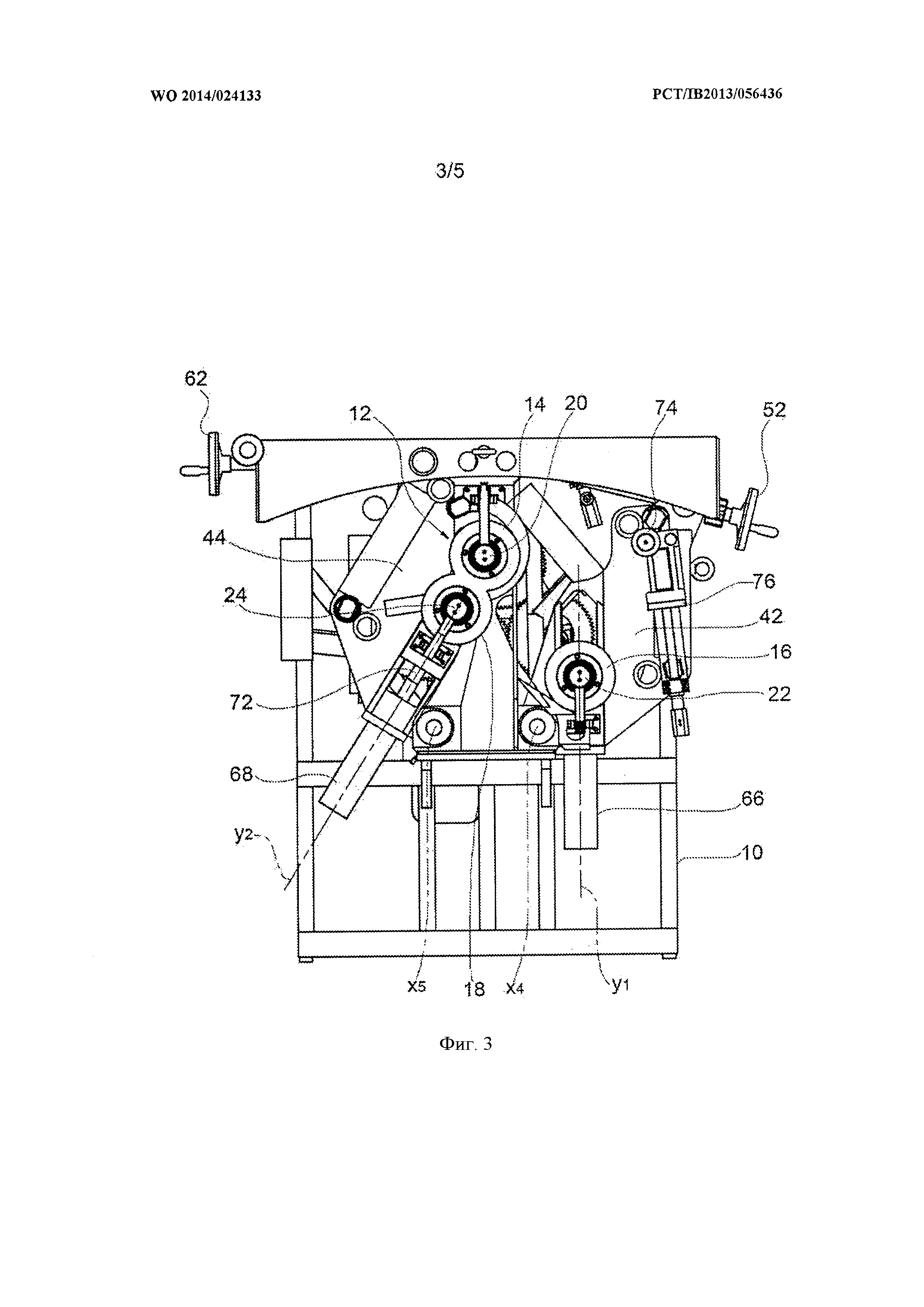
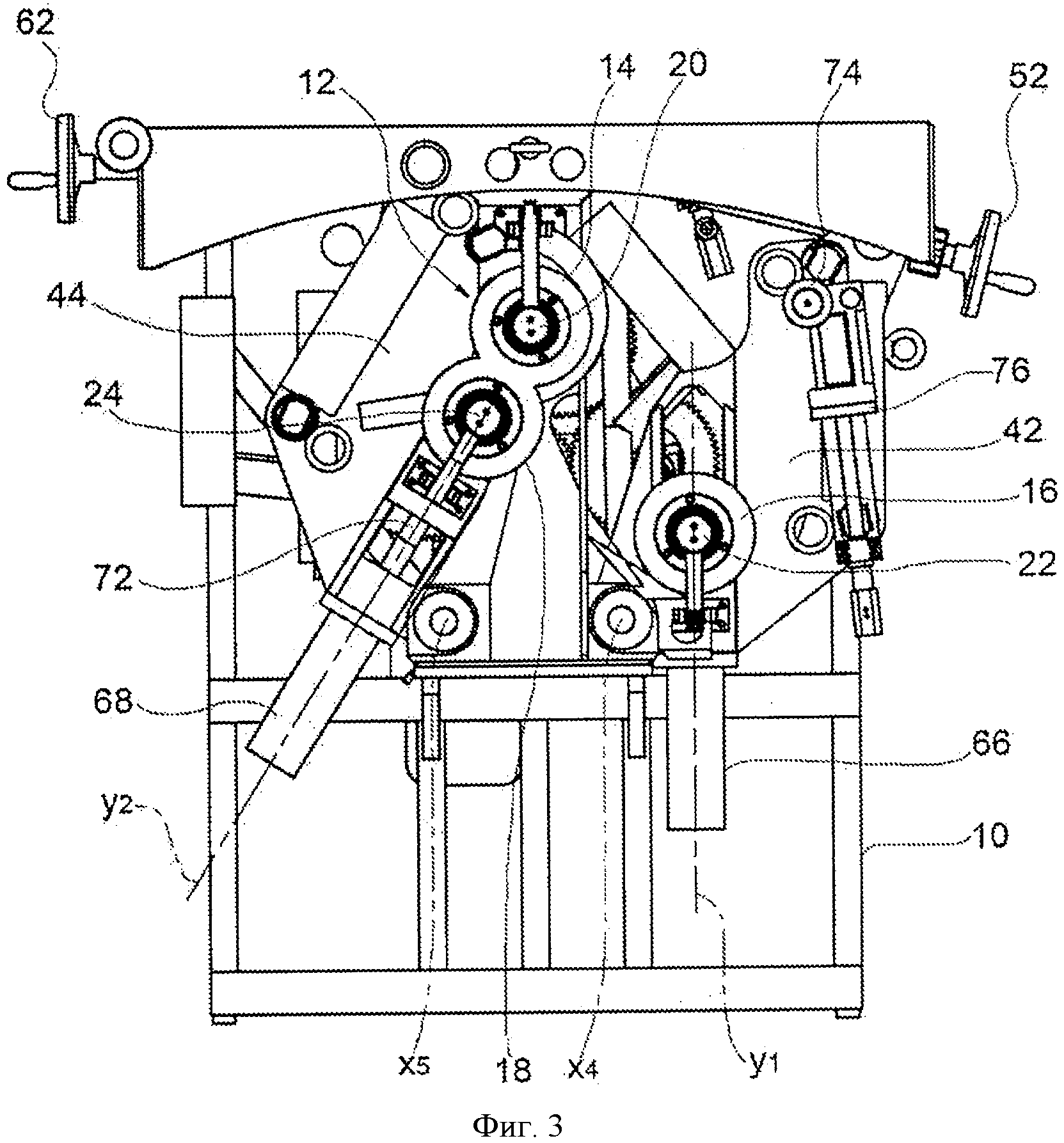
Фиг. 3 - вид сбоку гибочной машины, показанной на Фиг. 1 и 2; и
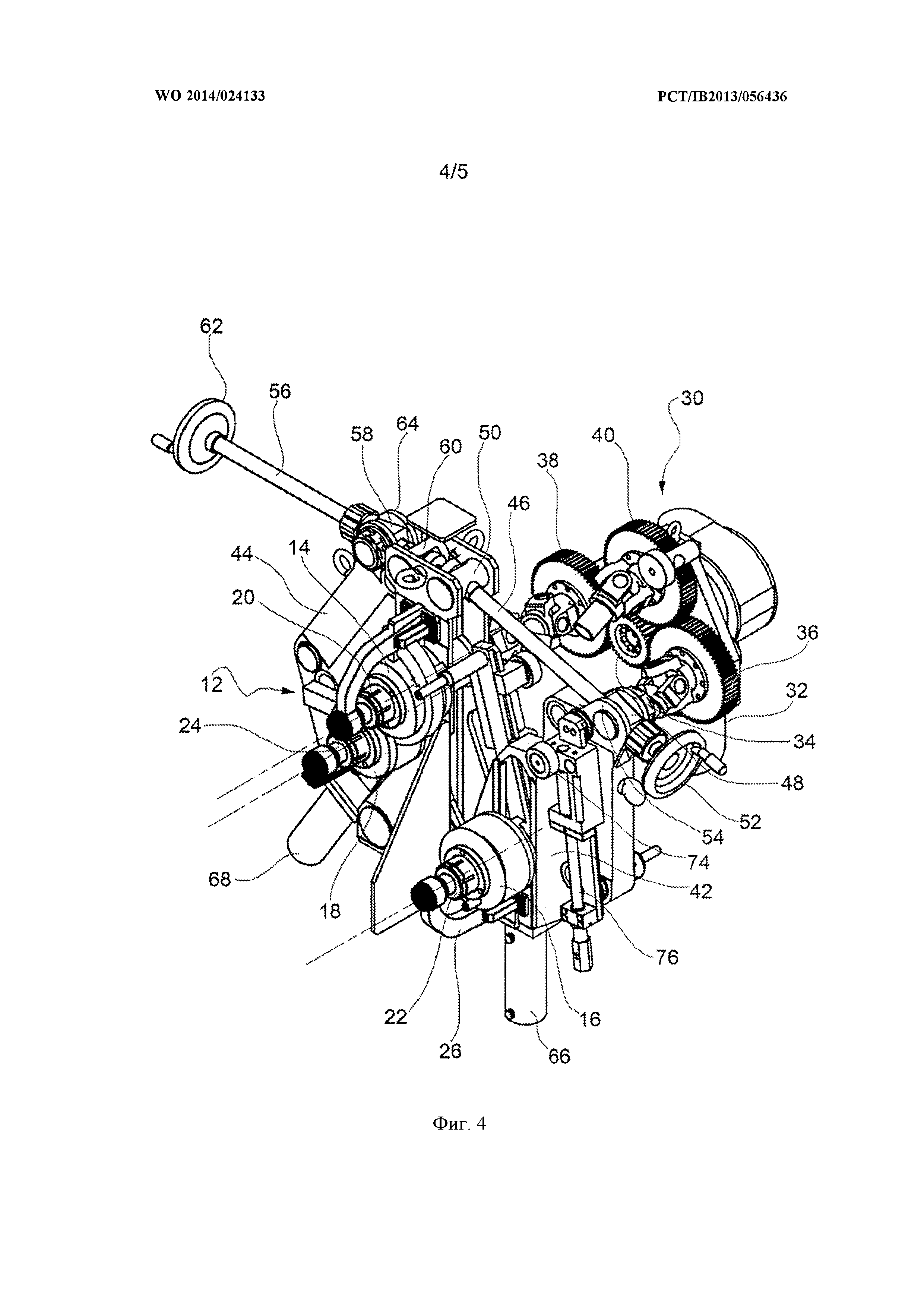
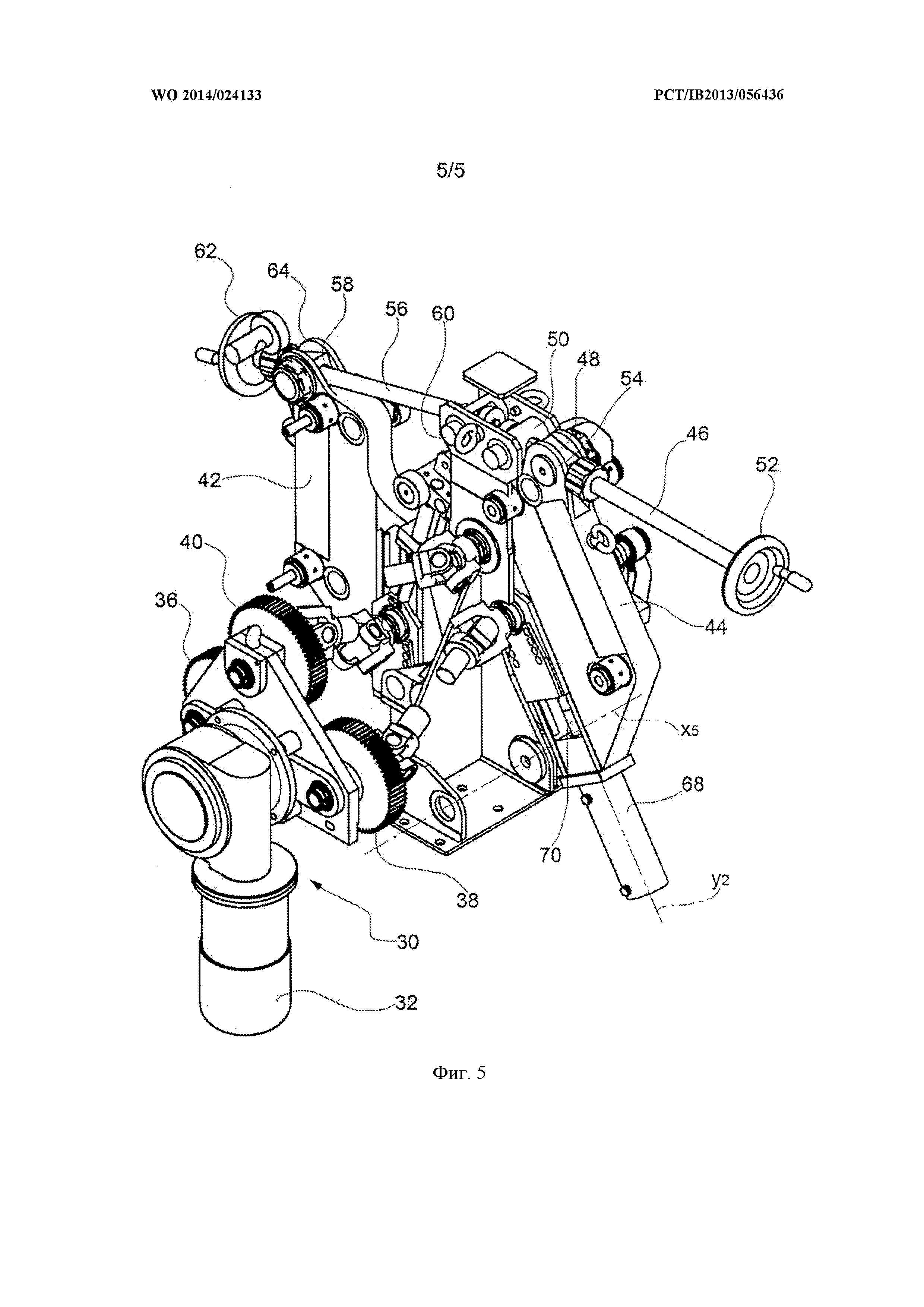
Фиг. 4 и 5 - перспективный вид спереди и перспективный вид сзади, соответственно, регулировочного механизма для регулирования положения валков гибочной машины, показанной на Фиг. 1 и 2.
Осуществление изобретения
Со ссылкой на чертежи гибочная машина по варианту выполнения настоящего изобретения в основном содержит конструкцию или раму, в общем обозначенную как поз. 10, и гибочное устройство, в общем обозначенное как поз. 12. Гибочная машина, показанная на чертежах, предназначена, в частности, для гибки профилей. Однако изобретение также применимо для гибочных машин, предназначенных для гибки металлических листов, как подробно объясняется ниже.
Гибочное устройство 12 содержит три валка с горизонтальными осями, а именно, первый валок (или неподвижный валок) 14, ось которого обозначена как х1, и пару вторых валков (или подвижных валков) 16 и 18, оси которых обозначены как x2 и х3, соответственно. Неподвижный валок 14 установлен на валу 20, который поддерживается в закрепленном положении конструкцией 10. Таким образом, положение оси x1 неподвижного валка 14 является фиксированным. В частности, ось x1 неподвижного валка 14 расположена в верхней зоне машины, по существу, в вертикальной средней плоскости машины. Подвижные валки 16 и 18 установлены на соответствующих валах 22 и 24, поддерживаемых на соответствующих подвижных опорах 26 и 28, в результате чего положения осей х2 и х3 этих валков могут изменяться независимо друг от друга. В частности, положение каждой из двух осей х2 и х3 может варьироваться с двумя степенями свободы в вертикальной плоскости, перпендикулярной этим осям, в то же время оставаясь ниже положения оси x1, и с обеих сторон вертикальной плоскости (средней плоскости), проходящей через ось х1. Таким образом, положения трех осей x1, х2 и х3 определяют вершины треугольника, форма и размеры которого варьируются в зависимости от положений осей x2 и х3, при этом верхняя вершина треугольника остается фиксированной по оси x1.
Гибочное устройство 12 также содержит узел 30 с двигателем, выполненный с возможностью приведения трех валков 14, 16 и 18 во вращение с одинаковой угловой скоростью вокруг соответствующих осей х1, х2 и х3 вращения. В варианте выполнения, показанном на чертежах, узел 30 с двигателем содержит электродвигатель 32, ведущую шестерню 34 с горизонтальной осью, которая приводится во вращение непосредственно электродвигателем 32, если необходимо, через установленный между ними редуктор или угловой редуктор, первую шестерню 36, входящую в зацепление с ведущей шестерней 34 и торсионно соединенную с помощью карданного вала (не показан) с валом 22, на котором установлен подвижный валок 16, вторую шестерню 38, входящую в зацепление с ведущей шестерней 34 и торсионно соединенную с помощью карданного вала (не показан) с валом 24, на котором установлен подвижный валок 18, и третью шестерню 40, входящую в зацепление с одной из двух шестерней 36 или 38 (в показанном примере с шестерней 36) и торсионно соединенную с помощью карданного вала (не показан) с валом 20, на котором установлен неподвижный валок 14. Шестерни 36, 38 и 40 имеют равное число зубьев и, следовательно, вращаются с одинаковой угловой скоростью. Соответственно, валки 14, 16 и 18, которые приводятся во вращение шестернями 36, 38 и 40 с помощью соответствующих карданных валов, также вращаются с одинаковой угловой скоростью. Использование карданных валов для соединения шестерней с валами, на которых установлены валки, легко обеспечивает передачу движения на подвижные валки, даже если положение этих валков не является фиксированным и может изменяться в зависимости от типа выполняемой гибки. Однако узел 30 с двигателем может отличаться от узла, показанного на чертежах, например (в частности, в случае крупногабаритных машин), он может содержать для каждого из трех валков соответствующий гидравлический редукторный двигатель.
Гибочное устройство 12 также содержит регулировочный механизм для регулирования положения осей х2 и х3 подвижных валков 16 и 18. Регулировочный механизм содержит пару наклоняемых плеч 42 и 44, которые шарнирно соединены у нижнего участка с конструкцией 10 машины и могут наклоняться относительно соответствующих неподвижных осей x4 и х5 вращения, соответственно, которые ориентированы параллельно осям x1, x2 и х3 валков 12, 14 и 16 и расположены рядом со средней вертикальной плоскостью машины. Опора 26, связанная с валом 20, на котором установлен подвижный валок 16, установлена на наклоняемом плече 42 и может перемещаться вдоль оси y1, которая зафиксирована относительно этого плеча. Аналогично, опора 28, связанная с валом 22, на котором установлен подвижный валок 18, установлена на наклоняемом плече 44 и может перемещаться вдоль оси y2, которая зафиксирована относительно этого плеча. Таким образом, положение каждой из осей х2 и х3 подвижных валков 16 и 18 может регулироваться с двумя степенями свободы, а именно, степенью свободы вращения вокруг соответствующей оси x4 или x5, определяемого движением наклона соответствующего наклоняемого плеча 42 или 44 вокруг этой оси, и степенью свободы поступательного перемещения вдоль соответствующей оси y1 или y2. Кроме того, положение оси х2 может регулироваться независимо от положения оси х3.
Наклонное движение наклоняемых плеч 42 и 44 вокруг соответствующих осей x4 и x5 вращения может осуществляться различными способами. Например, в предлагаемом здесь варианте выполнения наклоняемые плечи 42 и 44 могут приводиться в действие соответствующими механизмами винт-гайка. В частности, наклоняемое плечо 42 может приводиться в действие с помощью механизма винт-гайка, содержащего винт 46 и гайку 48, с которой находится в зацеплении винт 46. Винт 46 шарнирно присоединен на конце, обращенном к средней вертикальной плоскости машины, например, с помощью шарнира 50, в точке, которая фиксируется относительно конструкции 10 машины, и может приводиться во вращение вокруг собственной оси, например, с помощью маховичка 52, прикрепленного на противоположном конце. Гайка 48 шарнирно соединена с наклоняемым плечом 42, например, на участке 54 вилочного соединения, с возможностью передачи приводного усилия этому плечу, при этом движение гайки 48 в любом направлении вдоль оси винта 46 в результате вращения этого винта вынуждает наклоняемое плечо 42 наклоняться в любом направлении относительно оси x4 вращения. Аналогично, наклоняемое плечо 44 может приводиться в действие с помощью механизма винт-гайка, содержащего винт 56 и гайку 58, с которой находится в зацеплении винт 56. Винт 56 шарнирно присоединен на конце, обращенном к средней вертикальной плоскости машины, например, с помощью шарнира 60, в точке, которая фиксируется относительно конструкции 10 машины, и может приводиться во вращение вокруг собственной оси, например, с помощью маховичка 62, прикрепленного на противоположном конце. Гайка 58 шарнирно соединена с наклоняемым плечом 44, например, на участке 64 вилочного соединения, с возможностью передачи приводного усилия этому плечу, при этом движение гайки 58 в любом направлении вдоль оси винта 56 в результате вращения этого винта вынуждает наклоняемое плечо 44 наклоняться в любом направлении относительно оси x5 вращения.
Поступательное перемещение каждой из двух подвижных опор 26 и 28 вдоль соответствующих осей y1 или y2 контролируется с помощью соответствующего линейного исполнительного механизма, обозначенного как поз. 66 для подвижной опор 26 и как поз. 68 для подвижной опоры 28. Линейный исполнительный механизм, например, может быть электромеханическим исполнительным механизмом, содержащим электродвигатель, предназначенный для генерирования вращательного движения, и механизм управления перемещениями (например, механизм винт-гайка), предназначенный для преобразования вращательного движения, генерируемого электродвигателем, в поступательное перемещение выходного элемента (обозначенного как поз. 70 для линейного исполнительного механизма 66 и как поз. 72 для линейного исполнительного механизма 68). Подвижная опора 26 соединена с возможностью передачи приводного усилия с выходным элементом 70, в то время как подвижная опора 28 соединена с возможностью передачи приводного усилия с выходным элементом 72.
Гибочное устройство 12 также содержит, по существу, известным образом, пару боковых корректирующих валков 74 (только один из которых виден на чертежах). В этом случае каждый боковой корректирующий валок 74 установлен на соответствующем наклоняемом плече 42 и 44 и может перемещаться с помощью соответствующего линейного исполнительного механизма в соответствующем прямолинейном направлении, которое является фиксированным относительно соответствующего наклоняемого плеча.
Разумеется, при условии, что принцип изобретения остается неизменным, варианты выполнения и элементы конструкции могут широко варьироваться по отношению к вариантам выполнения и элементам конструкции, описанным и показанным только в качестве неограничивающего примера, без отклонения от объема изобретения, определенного в приложенной формуле изобретения.
Например, как указано выше, несмотря на то, что гибочная машина по изобретению описана и показана здесь со ссылкой на применение для гибки профилей, она в равной степени применима для гибки металлических листов (так называемого каландрирования). В случае гибочной машины, предназначенной для гибки металлических листов, регулирование положения осей двух боковых валков, разумеется, будет выполняться таким же образом, как описано выше, т.е. с первой вращательной степенью свободы, обеспечиваемой колебанием пары наклоняемых плеч, шарнирно прикрепленных к конструкции машины, и со второй степенью свободы, обеспечиваемой поступательным перемещением оси каждого подвижного валка в прямолинейном направлении, которое является фиксированным относительно соответствующего наклоняемого плеча, и будут изменяться только способ профилирования валков и способ поддержки валков. Фактически, валки будут иметь длину (осевой размер) больше длины валков, предназначенных для гибки профилей, и будут поддерживаться с обоих осевых концов. Для этого будут предусмотрены два регулировочных механизма, схожих с механизмом, описанным выше, каждый из которых будет содержать пару наклоняемых плеч, предназначенных для поддержки каждого соответствующего конца соответствующего подвижного валка, и исполнительное средство для регулирования вращения наклоняемых плеч и перемещения опор подвижных валков вдоль соответствующих наклоняемых плеч. В этой связи, поскольку два регулировочных механизма контролируются независимо друг от друга, имеется возможность ориентации двух подвижных валков таким образом, чтобы соответствующие оси были наклонены относительно друг друга и, таким образом, каждая относительно оси неподвижного валка для обеспечения конической гибки металлического листа.