Способ формирования результатов измерений на основании сигналов датчиков
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к способу формирования результатов измерений на основании сигналов, генерируемых одним или более отдельными датчиками, причем сигналы содержат два или более элемента данных, характеризующих одно и то же событие, причем каждый из датчиков расположен на рельсе, предназначенном для несения рельсового транспортного средства, при этом каждый из датчиков выполнен с возможностью измерения физической характеристики рельса и содержит передатчик, выполненный с возможностью передачи сигналов датчиков на физически удаленное устройство управления данными, содержащее приемник, выполненный с возможностью приема сигналов датчиков, процессор, выполненный с возможностью анализа сигналов датчиков, и запоминающее устройство, причем данный способ содержит этапы приема сигналов датчиков, анализа сигналов датчиков и сохранения сформированных результатов измерений.
Кроме того, изобретение относится к системе сбора данных и управления ими, выполненной с возможностью формирования результатов измерений на основании сигналов, генерируемых одним или более отдельными датчиками, каждый из которых расположен на рельсе, предназначенном для несения рельсового транспортного средства, при этом датчики выполнены с возможностью измерения физической характеристики рельса, и каждый датчик содержит передатчик, выполненный с возможностью передачи сигналов датчиков в устройство управления данными, физически удаленное от датчиков и содержащее приемник, выполненный с возможностью приема сигналов датчиков, и процессор, выполненный с возможностью анализа сигналов датчиков и формирования результатов измерений.
Уровень техники
Из уровня техники известно, например, сочетание датчиков веса и тензодатчиков, раскрытое, например, в полезной модели DE 21 2006 000 003 U1. Этот документ раскрывает рельсовое взвешивающее устройство с подключением к сети Ethernet, объединяющее несколько пар датчиков пластинчатого типа, установленных под железнодорожным путем, с датчиками усилия сдвига посредством сети Ethernet. После этого данные измерений передаются на компьютер в диспетчерской.
Кроме того, в патентной заявке JP 2009 184450 А раскрыта система информирования пассажиров о движении общественного транспорта, в частности, автобуса или поезда, путем определения веса транспортного средства при помощи датчиков веса, установленных на транспортном средстве, передачи информации о весе на сервер и соотношения информации о весе с количеством пассажиров, использующих транспортное средство. После этого информация о движении может быть передана на мобильное устройство пассажира, например сотовый телефон.
Патентная заявка CN 1831496 раскрывает дистанционный контроль производительности угольных шахт путем беспроводной передачи информации о весе с динамических железнодорожных весов в центр мониторинга. В этом случае данные датчиков обрабатываются процессором перед передачей в центр мониторинга.
Патентная заявка JP 2005 156298 А раскрывает устройство для измерения нагрузки на колесо и бокового усилия, содержащее полупроводниковые датчики, блок обработки данных и беспроводной передатчик. Поскольку блок обработки данных часть внутри датчика вычисляет нагрузку на колесо и боковое усилие, можно уменьшить объем обрабатываемых данных на стороне приемника.
Патентная заявка ЕР 1239268 А1 раскрывает сетевую полуавтоматическую взвешивающую систему, содержащую взвешивающее устройство с механизмами измерения веса и приемопередающее устройство, передающее информацию о весе в информационную сеть, в которой информация о весе хранится, управляется и передается пользователям посредством проводной или беспроводной сети. Информация может отображаться на мобильных устройствах. Взвешивающее устройство и сеть обмениваются информацией в обоих направлениях. При передаче в сеть информации о весе сеть может возвращать квитирующий сигнал или управлять вторичными функциями взвешивающего устройства.
Техническая задача
Целью настоящего изобретения является обеспечение усовершенствованного способа формирования результатов измерений на основании сигналов датчиков. Например необходимо разработать способ, позволяющий выполнять повторную оценку и перекалибровку сигналов датчиков с использованием одного или более ранее измеренных сигналов от одного датчика или сигналов от двух или более различных датчиков.
Кроме того, целью настоящего изобретения является обеспечение усовершенствованной системы сбора данных и управления ими. Кроме того, необходимо максимально смягчить требования к обработке данных в датчике или в непосредственной близости от датчика, что позволит уменьшить занимаемое пространство и снизить потребление энергии в месте расположения датчика.
Решение технической задачи
Согласно изобретению указанная задача решена благодаря способу формирования результатов измерений на основании сигналов датчиков согласно ограничительной части пункта 1 формулы изобретения, в котором устройство управления данными (УУД) сохраняет принятые сигналы датчиков в запоминающем устройстве, а анализ содержит этап объединения и/или сравнения друг с другом по меньшей мере двух элементов данных из одного или более сохраненных сигналов датчиков.
Сохранение принятых сигналов датчиков в УУД предпочтительно позволяет выполнять и/или повторять анализ сигналов датчиков в более поздний момент времени. Этап анализа сигналов датчиков в УУД, сравнения и/или объединения по меньшей мере двух величин одного или более сохраненных сигналов датчиков, предпочтительно, позволяет отделить формирование результатов измерений от генерирования сигналов датчиков. Таким образом, способ значительно увеличивает гибкость при формировании результатов измерения на основании сигналов датчиков. Например становится возможным получение информации об исторической и/или статистической эволюции сигналов от одного или более датчиков.
Под рельсовым транспортным средством в смысле настоящего изобретения понимают транспортное средство любого рода, способное перемещаться по рельсовому пути, содержащему по меньшей мере один рельс, и несомое указанным рельсом. Такое рельсовое транспортное средство (в дальнейшем называемое просто «транспортным средством») представляет собой железнодорожный вагон, локомотив, вагонетку, троллейбус, трамвай, вагон метрополитена, фуникулер, вагон зубчатой железной дороги или составной поезд, состоящий из нескольких железнодорожных вагонов и локомотива или содержащий по меньшей мере один самоходный вагон. Рельсовые транспортные средства могут перевозить пассажиров и/или грузы. Изобретение относится к рельсовым транспортным средствам, эксплуатируемым вне и/или внутри помещений, в частности, к системам рельсового складского транспорта. Указанные рельсовые транспортные средства движутся по рельсам и направляются рельсами, образующими рельсовый путь. Рельсовое транспортное средство подвешивают на рельсовом пути или перемещают по рельсовому пути. Рельсовый путь образуется одним, двумя, тремя или более рельсами. Таким образом, изобретение относится как к монорельсовым системам, так и к рельсовым системам с третьим рельсом, в частности зубчатой железной дороге или фуникулеру, используемым в горных массивах, или к рельсовым системам метрополитена, в которых третий рельс обеспечивает электрическое питание поезда, при условии, что, по меньшей мере, один из рельсов выполнен как опора транспортного средства. Наиболее распространены рельсовые пути, образованные двумя параллельными рельсами. Рельсы обычно изготавливают из металла. Наиболее распространены стальные рельсы. Тем не менее, изобретение не ограничивается конкретным видом рельса.
Согласно изобретению датчик представляет собой устройство, предназначенное для измерения физической характеристики рельса. Следует отметить, что датчик измеряет изменение физической характеристики рельса, вызванное рельсовым транспортным средством, опирающимся на рельс во время события. Кроме того, датчик может быть выполнен с возможностью измерения более одной физической характеристики рельса, например, деформации рельса, вызванной рельсовым транспортным средством, и ускорения датчика, установленного на рельс. Измерение физической характеристики рельса подразумевает, что датчик генерирует зависимые от времени электрические сигналы, например, зависящие от времени сигналы напряжения или тока, отражающие изменение измеренной физической характеристики с течением времени.
В целях изобретения под «сигналом датчика» понимают представление зависящего от времени электрического сигнала, из которого можно вывести исходно измеренную физическую характеристику. Это означает, что преобразованный сигнал датчика по-прежнему считается сигналом датчика. Под преобразованием сигналов датчиков понимают: усиление сигналов датчиков, аналого-цифровое преобразование, сжатие данных и/или определение значений параметров сигнала датчика. Сигналы датчиков преобразуются в датчике и/или в УУД. Для этого предпочтительный датчик содержит устройство преобразования сигнала, например, усилитель, аналого-цифровой преобразователь и/или процессор. В более предпочтительном варианте преобразование может выполняться в отдельном устройстве и/или в принимающем УУД. В частности «сохраненный сигнал датчика» может представлять собой преобразованный «принятый сигнал датчика», а «принятый сигнал датчика» может представлять собой преобразованный «сгенерированный сигнал датчика».
Каждый сигнал датчика содержит по меньшей мере два элемента данных от одного и то же события. Элементы данных представляют собой значения, измеренные в определенные и известные - по меньшей мере, по отношению друг к другу - моменты времени, или параметры функции, например, амплитуду или частоту колебания, на основании которых можно вывести или приближенно выразить первоначально измеренную физическую характеристику или зависящий от времени электрический сигнал.
Под событием понимают: событие «поезд», событие «вагон» или событие «колесо». Событие «поезд» наступает, когда поезд проходит мимо датчика, событие «вагон» наступает, когда железнодорожный вагон или локомотив в виде отдельного рельсового транспортного средства или в составе поезда проходит мимо датчика, а событие «колесо» наступает, когда одно или более колес одной оси рельсового транспортного средства проходит мимо датчика. Из этого определения следует, что событие «поезд» включает в себя ряд из по меньшей мере из двух событий «вагон», а событие «вагон», как правило, содержит ряд из по меньшей мере событий «колесо». Во время события датчик генерирует сигнал датчика. Сигнал датчика, сгенерированный во время события «поезд», можно преобразовать в по меньшей мере два сигнала события «вагон». Каждый сигнал события «вагон», в свою очередь, может быть преобразован в по меньшей мере два сигнала события «колесо». И, наоборот, можно сгенерировать сигнал события «вагон» на основании по меньшей мере двух сигналов события «колесо» или сгенерировать сигнал события «поезд» на основании по меньшей мере двух сигналов события «вагон». Поскольку каждый сигнал датчика содержит по меньшей мере два элемента данных, сигнал датчика, сгенерированный событием «вагон», содержит по меньшей мере четыре элемента данных, а сигнал датчика, сгенерированный событием «поезд», содержит по меньшей мере восемь элементов данных. Поскольку каждый элемент данных был получен в известный момент времени, событие выражается временным рядом элементов данных. Предпочтительно сигнал датчика содержит более десяти элементов данных, в более предпочтительном варианте - более ста элементов данных, в еще более предпочтительном варианте - более тысячи элементов данных.
Местом измерения считают положение одного или более датчиков на рельсе, например, на боковой или нижней поверхности рельса, и/или на опорной конструкции рельса или рельсового пути. Датчик может быть выполнен, например, с возможностью измерения механической деформации рельса, вызванной нагрузкой рельсового транспортного средства, опирающегося на рельс. Нагрузка может представлять собой, например, статическую силу, в частности, силу тяжести, обусловленную тяжестью рельсового транспортного средства, и/или динамическую силу, обусловленную, например, движением рельсового транспортного средства по рельсу, которое может также вызывать колебания в рельсе. Согласно изобретению используют один или более отдельных датчиков. При использовании более одного датчика каждый датчик должен быть расположен на рельсе. При этом под рельсом могут пониматься различные участки одного и того же рельса, которые могут быть расположены вблизи или на удалении друг от друга в смысле географического положения, или же различные рельсы, не соединенные друг с другом или даже относящиеся к различным рельсовым путям.
Датчик может измерять, например, вес рельсового транспортного средства, который является силой, воздействующей на рельсовое транспортное средство под действием гравитации, и пропорциональной массе рельсового транспортного средства. Поскольку рельсовое транспортное средство опирается на рельс, сила действует на рельс, но на нее может влиять движение рельсового транспортного средства и/или ориентация самого рельса, который не всегда точно перпендикулярен направлению силы тяжести. Пары рельсов часто слегка наклонены друг к другу с целью центрирования рельсового транспортного средства. Кроме того, вес распределяется по нескольким колесам рельсового транспортного средства. Эти дополнительные эффекты необходимо учитывать при определении массы рельсового транспортного средства. Таким образом, измерение веса рельсового транспортного средства включает в себя измерение силы, с которой рельсовое транспортное средство опирается на рельс. Тем не менее, искомая физическая величина является массой рельсового транспортного средства. В настоящем документе под весом понимают силу тяжести, обусловленную тяжелой массой. Чтобы определить массу на основании измерения веса, могут потребоваться сложные расчеты. Для этих расчетов могут потребоваться мощные процессоры, а также одна или более баз данных, предоставляющих параметры, необходимые для выполнения алгоритма калибровки или выполненные с возможностью хранения данных измерений.
Передатчик представляет собой устройство, передающее сигналы, а приемник представляет собой устройство, принимающее сигналы. Между передатчиком и приемником имеется носитель, позволяющий передавать сигналы между передатчиком и приемником. Согласно изобретению носитель может представлять собой сеть, прямое проводное соединение или беспроводное соединение. К возможным сетям относятся, например, интернет, сеть сотовой мобильной связи или другие беспроводные сети. Связь между передатчиком и приемником может быть осуществлена с помощью медных проводов или оптоволокна.
Согласно изобретению под запоминающим устройством понимают физическое устройство, предназначенное для хранения информации и облегчения считывания информации. Информация включает в себя сигналы датчиков, компьютерные программы и алгоритмы. Запоминающее устройство может включать в себя энергозависимое или постоянное запоминающее устройство или комбинацию обоих видов запоминающих устройств. Например запоминающее устройство может представлять собой жесткий диск компьютера, флэш-память, оперативную память, кэш-память процессора или любую их комбинацию. Процессор согласно изобретению представляет собой микропроцессор, например центральный процессор компьютера.
Устройство управления данными (УУД) можно рассматривать как сервер, принимающий сигналы датчиков, сохраняющий принятые сигналы датчиков в запоминающем устройстве, оценивающий и/или анализирующий сохраненные сигналы датчиков и, таким образом, формирующий результаты измерений. Оценка и/или анализ данных датчика выполняется в процессоре. Согласно изобретению УУД физически удалено от датчиков. Под словами «физически удалено» понимают отсутствие непосредственного физического контакта УУД с датчиками, исключая средства, передающие сигналы от датчиков к УУД, например провод или кабель. В частности, датчики и УУД не прикреплены друг с другу никаким образом, например, не установлены на одной печатной плате. Предпочтительно датчики и УУД имеют отдельные корпуса и отдельные источники питания. Предпочтительно УУД удалено на по меньшей мере несколько десятков метров от датчиков. Обычно УУД устанавливают в нескольких десятках километров от датчиков, сохраняя при этом возможность получения сигналов от датчиков с помощью проводного соединения. Обмен информацией между датчиками и УУД осуществляется посредством сигналов датчиков, которые также могут содержать метаданные, связанные с сигналами датчиков. В частности, датчик выполняет измерение и передает сигналы независимо от наличия УУД. Датчик может быть выполнен с возможностью непрерывного генерирования и передачи сигналов независимо от наличия рельсового транспортного средства или датчик может содержать электронные компоненты, определяющие пороговое значение и затем инициирующие передачу сигналов. Также может быть предусмотрена возможность обнаружения приближающегося рельсового транспортного средства с помощью других средств и инициирования измерения и передачи сигналов датчиков. В предпочтительном варианте между датчиками и УУД существует беспроводное соединение. В качестве альтернативы или дополнения между датчиком и УУД может существовать физическое соединение в виде проводной сети. Предпочтительно УУД представляет собой компьютерную систему, подключенную к интернету предпочтительно принимающую сигналы датчиков через интернет-соединение.
Согласно изобретению формирование результата измерения содержит несколько этапов. Сначала данные собирают в УУД, принимая сигналы от одного или более датчиков. Затем, после сохранения сигналов датчиков в запоминающем устройстве, выполняют оценку и/или анализ сигналов датчиков, а также, возможно, их интерпретацию. Согласно изобретению количественная и/или качественная оценка и/или анализ и/или интерпретация сигналов датчиков называется «оценкой» сигналов датчиков, на выходе которой может быть получен результат измерения. УУД выполняет оценку сигналов датчиков посредством компьютерных программ, алгоритмов, операций и/или других инструкций, например, в виде компьютерного кода, содержащего математические операции или таблицы преобразований. Результатом измерения может быть исходная физическая характеристика, измеренная датчиком, или производная величина. Например, результатом измерения, полученным на основании сигнала датчика, может быть деформация рельса, вызванная воздействием рельсового транспортного средства, или полученная на основании этого масса самого рельсового транспортного средства. На основании одного сигнала датчика и/или ряда сигналов датчиков или величин можно получить несколько различных физических величин. Например, частотный спектр сигнала может быть получен путем выполнения преобразования Фурье и получения информации о вибрации рельса, вызванной рельсовым транспортным средством, что позволяет даже получить информацию о грузе и/или распределении грузов в рельсовом транспортном средстве или дисбалансе колес рельсового транспортного средства. Кроме того, на основании оценки сигналов датчика можно построить, например, функцию калибровки датчика. Оценка сигналов датчиков может также включать перегруппировку или реконфигурацию величин сигнала датчика и/или выполнение статистического анализа величин и/или сигналов датчиков.
Согласно изобретению сравнение и/или объединение двух или более элементов данных одного или более сигналов датчиков друг с другом подразумевает выполнение одной или более операций, каждая из которых использует два или более элемента данных в качестве входных аргументов и создает один или более результатов измерений. Под операцией понимают математическую или логическую операцию, использующую по меньшей мере две или более величины в качестве входных аргументов и доступную для выполнения с помощью процессора УУД. Процессы отображения или графического изображения величин, например, в виде таблицы или на экране компьютера, не являются операциями в смысле настоящего изобретения. Предпочтительно одна или более операций реализованы в виде компьютерного алгоритма или программы, например алгоритма, соответствующего аналитической функции относительно величин, причем результатом выполнения этого алгоритма будут параметры соответствующей функции. Два или более элемента данных могут быть определены одним датчиком или двумя и более различными датчиками. В частности два элемента данных могут быть определены двумя различными датчиками, что означает, что один элемент данных от одного датчика сравнивается и/или объединяется с одним элементом данных от другого датчика. Сигналы датчиков могут генерироваться на основании измерения физической характеристики рельса, взаимодействующего с одним и тем же рельсовым транспортным средством или с двумя и более различными рельсовыми транспортными средствами. Возможно количественное или качественное сравнение и/или объединение элементов данных.
Сравнение элементов данных может содержать вычисление соотношения или разности между двумя и более величинами. Объединение элементов данных может содержать вычисление произведения или суммы двух и более величин. В частности, УУД может вычислять среднее арифметическое двух элементов данных. Данные, используемые на этом этапе, могут представлять собой любые два или более элемента данных, хранящиеся в УУД. Например элементы данных из последнего принятого сигнала датчика можно сравнить с одним или более элементами данных из архивных сигналов датчиков, причем все сигналы датчиков сгенерированы одним и тем же датчиком. В альтернативном варианте можно сопоставить друг с другом элементы данных из сигналов датчиков, сгенерированных двумя и более датчиками. Таким образом, можно повысить точность измерения или устранить систематические ошибки.
Так как сигналы датчиков сохраняются в запоминающем устройстве УУД, оценку можно выполнять впоследствии. Тем не менее, сигналы датчиков не обязательно сохранять в том же виде, в котором они были получены УУД. Может быть предпочтительным преобразование принятых сигналов перед сохранением.
Например перед сохранением принятые сигналы датчиков можно сжать для уменьшения размера сигналов датчиков или можно добавить метаданные. Это означает, что оценку можно будет повторить впоследствии. Поэтому нет необходимости в хранении результатов измерений. Тем не менее, предпочтительно, чтобы УУД имело возможность хранения результатов измерений вместе с сигналами датчиков. В этом случае результаты измерений могут быть предоставлены немедленно по запросу и не требуют повторного вычисления на основании сигналов датчиков. Это может упростить объединение или сравнение двух и более результатов измерений друг с другом. Такая оценка результата измерения создает новый результат измерения, который также может быть сохранен в запоминающем устройстве.
Например УУД позволяет просмотреть результат предыдущего измерения (например, веса порожнего рельсового транспортного средства), вычисленный на основании сигнала датчика, и сравнить его с результатом нового измерения (например, весом брутто транспортного средства), вычисленным на основании сигнала датчика, полученного от того же (или другого) датчика, с целью вычисления нового производного результата измерения (например, веса нетто рельсового транспортного средства) путем объединения и/или сравнение сохраненных результатов измерений или сигналов датчиков.
Преимущества настоящего изобретения достигаются за счет разделения задач между датчиками и УУД. Задача датчика состоит в генерировании сигналов и их передачи в УУД. Задача УУД состоит в приеме сигналов датчиков, сохранении сигналов датчиков, выполнении отложенного анализа данных и вычислении результатов измерений на основании указанных сигналов датчиков. Благодаря такому разделению в качестве датчиков можно использовать очень простые и недорогие устройства, требующие минимального обслуживания и простые в установке. Поэтому использование таких датчиков может давать очень существенную экономию. С другой стороны, УУД может быть расположено удаленно от датчиков, в месте, хорошо подходящем для обработки данных. Пригодность местоположения может определяться защитой от воздействия тепла и/или сейсмических явлений. Централизация оценки сигнала позволяет обновить систему, например, установив самых мощные доступные процессоры последнего поколения, не заменяя датчики. Кроме того, она облегчает централизованное обновление программного обеспечения, управляющего УУД, включая алгоритмы обработки данных. Таким образом, новые результаты измерений можно получить на основании сохраненных сигналов датчиков путем применения новых алгоритмов, которые еще не были известны во время получения сигналов датчиков. Кроме того, изобретение упрощает централизованное хранение сигналов датчиков, а также результатов измерений. Это позволяет сделать результаты измерений и/или сигналы датчиков легко доступными для пользователя системы.
Техническая задача также решена посредством способа формирования результатов измерений в соответствии с ограничительной частью пункта 2 формулы изобретения. Согласно изобретению оценка сигналов датчиков в устройстве управления данными содержит этап, на котором два или более элемента данных объединяют и/или сравнивают друг с другом, причем два или более элемента данных получены из сигналов датчиков, сгенерированных в различные моменты времени.
Техническая задача также решена посредством системы сбора данных и управления ими (ССДУ) в соответствии с ограничительной частью пункта 6 формулы изобретения. Согласно изобретению устройство управления данными выполнено с возможностью сохранения принятых сигналов датчиков и оценки сохраненных сигналов датчиков путем объединения и/или сравнения друг с другом по меньшей мере двух элементов данных одного или более сохраненных сигналов датчиков.
Техническая задача также решена посредством системы сбора данных и управления ими (ССДУ) в соответствии с ограничительной частью пункта 7 формулы изобретения. Согласно изобретению минимальное расстояние между любым датчиком и устройством управления данными превышает 1 км.
Предпочтительные варианты осуществления изобретения
В одном из вариантов осуществления изобретения два сигнала датчиков, сгенерированные в различные моменты времени, связаны с двумя различными событиями, предпочтительно - с двумя событиями «колесо», более предпочтительно - с двумя событиями «вагон», еще более предпочтительно - с двумя событиями «поезд». В другом варианте осуществления изобретения два сигнала датчиков сгенерированы одним и тем же событием, но двумя различными датчиками. Предпочтительно два сигнала датчика генерируются двумя различными датчиками, причем оба датчика отстоят друг от друга в направлении движения рельсового транспортного средства по рельсу таким образом, чтобы одно и то же событие вызывало генерирование сигналов датчиков в различные моменты времени. Предпочтительно различные моменты времени разнесены, по меньшей мере, на обратную частоту дискретизации датчика или обоих датчиков с целью их различения. Например, если частота дискретизации двух датчиков составляет 1 кГц, различные моменты времени должны быть разнесены, по меньшей мере, на 1 мс. В более предпочтительном варианте частота дискретизации составляет 1 Гц, а различные моменты времени разнесены, по меньшей мере, на 1 с.
В предпочтительном варианте осуществления событие, два или более элемента данных которого содержатся в сигнале, является событием «поезд», более предпочтительно - событием «вагон», еще более предпочтительно - событием «колесо». Предпочтительно событие имеет заданную длительность и инициируется приближающимся рельсовым транспортном средством. Предпочтительное событие имеет минимальную длительность одну секунду, более предпочтительно - десятки секунд, еще более предпочтительно - одну минуту. Предпочтительно событие инициируется, когда сигнал датчика превышает заданное пороговое значение. Для этого предпочтительный датчик содержит электронную схему, выполненную с возможностью сравнения сгенерированного сигнала или отдельных элементов данных с заданным пороговым значением. В более предпочтительном варианте событие имеет переменную продолжительность, в течение которой датчик генерирует сигнал, превышающий два заданных пороговых значения или находящийся между ними. В предпочтительном варианте осуществления изобретения событие инициируется фотоэлектрическим барьером, распознающим рельсовое транспортное средство, проходящее мимо датчика или точки измерения или приближающееся к нему. Предпочтительно место измерения находится между двумя фотоэлектрическими барьерами, выполненными с возможностью генерирования сигнала начала события, например, когда поезд проходит через первый барьер, и сигнала конца события, например, когда последний вагон поезда покидает второй барьер. В предпочтительном варианте способа датчик генерирует сигнал, содержащий более десяти, предпочтительно - более ста, еще более предпочтительно - более одной тысячи элементов данных во время каждого события. Предпочтительно датчик измеряет событие с частотой дискретизации не менее 10 элементов данных в секунду, более предпочтительно - 100 элементов данных в секунду, еще более предпочтительно - 1000 элементов данных в секунду.
В предпочтительном варианте осуществления изобретения способ содержит этап, на котором по меньшей мере один из по меньшей мере двух элементов данных одного или более сохраненных сигналов датчиков, которые сравниваются и/или объединяются друг с другом, сгенерирован калиброванным датчиком. Такая оценка выполняется с помощью устройства управления данными (УУД), содержащего запоминающее устройство и процессор. Предпочтительно сигнал калиброванного датчика также сохранен в запоминающем устройстве УУД. Результатом этого этапа может стать функция калибровки датчика, сгенерировавшего сохраненный сигнал датчика, с которым сравнивался сигнал калиброванного датчика. Предпочтительно оба сигнала, сохраненный сигнал датчика и сигнал калиброванного датчика, были сгенерированы при измерении рельсового транспортного средства с одинаковой массой. В более предпочтительном варианте измерялось такое же рельсовое транспортное средство. Два измерения могут быть выполнены с большой разностью во времени и/или пространстве. В предпочтительном варианте осуществления полученная функция калибровки может быть сохранена в запоминающем устройстве УУД для последующей оценки сигналов датчиков. Предпочтительно УУД может сравнивать архивный результат измерения или функцию калибровки конкретного датчика с результатами измерений, полученными на основании новых сигналов датчиков, чтобы убедиться, что датчик по-прежнему откалиброван в пределах требуемой погрешности. Преимуществом этого способа можно считать возможность обнаружения смещения датчиков и инициирования необходимой повторной калибровки датчика.
Предпочтительно устройство управления данными принимает сигналы датчиков в качестве первичных данных. Согласно изобретению первичными данными являются сигналы датчиков, элементы данных которых еще не сравнивались и/или не объединялись с элементами данных других сигналов датчиков. В предпочтительном варианте осуществления изобретения сигналы датчиков преобразуются в датчике в форму, пригодную для обработки передатчиком. Преимуществом приема сигналов датчиков в качестве первичных данных может являться отсутствие необходимости оснащать датчики процессорами для обработки сигналов. Таким образом, датчики могут представлять собой простые и дешевые устройства, нуждающиеся только в передатчике для передачи первичных данных в УУД. Еще одним преимуществом может быть возможность сохранения первичных данных в запоминающем устройстве УУД для повторной оценки в более поздний момент времени. Например путем сравнения величин архивных сигналов датчиков с величинами недавних сигналов датчиков можно обнаружить смещение датчика. Также может быть выгодным использование способов оценки сигналов датчиков, которые не были известны на момент генерирования сигнала датчика. Например можно вывести или вычислить характеристики железнодорожного вагона или его груза, сгенерировавшего исходные сигналы датчика, например, тип груза (жидкий или твердый), распределение нагрузки по всей длине железнодорожного вагона, дисбаланс колес, вибрации и/или расстояние между рельсами. Таким образом, преимуществом передачи первичных данных может быть отсутствие потерь информации по сравнению с датчиком, передающим обработанные или оцененные сигналы датчиков, например, в виде отдельных значений. В альтернативном варианте осуществления сигналы датчиков усиливают перед передачей. Это может быть выгодно улучшением отношения сигнал-шум сигналов датчиков. В другом предпочтительном варианте способа сигналы датчиков преобразуют в датчике из аналоговой в цифровую форму.
В предпочтительном варианте осуществления УУД хранит метаданные, связанные с сигналами датчиков. Под метаданными понимают любую дополнительную информацию, полученную с помощью датчиков и/или дополнительных электронных компонентов датчика и/или УУД. Метаданные могут, например, содержать временную отметку для записи времени генерирования сигнала датчиком или времени принятия УУД сигнала датчика. В предпочтительном варианте метаданные могут содержать средства географической привязки. Средство географической привязки содержит информацию о географическом положении датчика. В другом предпочтительном варианте метаданные могут содержать информацию, идентифицирующую рельсовое транспортное средство, груз рельсового транспортного средства, визуальную или звуковую информацию о рельсовом транспортном средстве, информацию об окружении датчика, например, температуру, давление воздуха, другую климатическую информацию или любую иную информацию. Сохранение метаданных, связанных с сигналами датчиков, позволяет получать более детализированные или иные результаты измерений на основании сигналов датчиков. Например можно объединить средство географической привязки и отметку времени для вычисления средней скорости рельсового транспортного средства. Метаданные могут происходить из датчика любого типа, передающего свои сигналы в УУД. Метаданные могут быть синхронизированы с данными датчиков или нет. Предпочтительно УУД получает метаданные таким же образом, каким принимает сигналы датчиков. Предпочтительно метаданные также сохраняются в запоминающем устройстве УУД.
В предпочтительном варианте осуществления запоминающее устройство устройства управления данными выполнено с возможностью хранения результатов измерений. Преимущество этого заключается в возможности сохранения каждого измерения и его отображения для пользователя. Кроме того, этот вариант позволяет использовать результаты измерений для оценки сигналов датчиков. В предпочтительном варианте осуществления результаты измерения можно оценивать путем объединения и/или сравнения двух или более результатов измерений друг с другом. Предпочтительно УУД хранит результаты измерений не менее двух недель, более предпочтительно - более одного месяца, еще более предпочтительно - более года. Предпочтительно сигналы датчиков также сохраняются более двух недель, более предпочтительно - более одного месяца, еще более предпочтительно - более одного года. Хранение сигналов датчиков и/или результатов измерений предпочтительно позволяет получить доступ к этим сигналам и/или результатам измерений для дальнейшей оценки и/или анализа.
В предпочтительном варианте осуществления устройство управления данными содержит передатчик, выполненный с возможностью передачи результата измерения внешнему приемнику. В предпочтительном исполнении передатчик передает результаты через сеть. К предпочтительным сетям относятся интернет, сотовая сети передачи данных, телефонная сеть или любая другая сеть, подходящая для передачи данных.
В предпочтительном варианте осуществления результаты измерений можно передавать пользователю и/или оператору рельсового транспортного средства. Например вес вагона измеряется в двух точках измерения вдоль рельсового пути, и УУД оценивает вес вагона в каждой точке измерения. Если найденная разница в весе рельсового транспортного средства превышает заданное пороговое значение, то УУД может передать предупреждающий сигнал машинисту поезда, информируя его о возможной потере груза между двумя измерениями.
В предпочтительном варианте осуществления системы сбора данных и управления ими (ССДУ) по меньшей мере один датчик содержит локальный интерфейс, выполненный с возможностью локального считывания сигналов датчиков. Предпочтительно такое локальное считывание реализовано в виде интерфейса последовательной шины, например, USB- или RS232-соединения, или в виде параллельной шины, например, GPIB. В более предпочтительном варианте данные считывают локально с помощью беспроводных соединений, например, Bluetooth или WLAN. Это может быть выгодно тем, что в случае выхода из строя средств передачи сигналов датчиков в УУД сохраняется возможность локального считывания сигналов датчиков.
В предпочтительном варианте осуществления по меньшей мере один датчик содержит блок обработки сигнала, выполненный с возможностью усиления сигналов датчиков и/или преобразования сигналов датчиков из аналоговой формы в цифровую форму. Предпочтительно сигнал датчика усиливают перед передачей на УУД. Это может быть выгодно возможностью передачи исходно слабого сигнала. Другим преимуществом может быть возможность улучшения соотношения сигнал-шум с помощью предпочтительного усилителя. В другом предпочтительном варианте осуществления аналоговые сигналы датчиков преобразуются в цифровую форму (аналого-цифровое преобразование) перед передачей в УУД. В альтернативном варианте осуществления УУД выполнено с возможностью усиления и/или преобразования принятых данных. В предпочтительном исполнении блоки обработки данных не изменяют характер сигналов. Усиленные и/или преобразованные из аналоговой в цифровую форму первичные данные могут по-прежнему рассматриваться в качестве первичных данных. В предпочтительном варианте осуществления датчик содержит средства для применения аналитической функции к сигналу датчика, например, синусоидальной или экспоненциальной функции. В этом случае передаваемый набор элементов данных будет содержать результаты применения функции. Поскольку подобная аналитическая функция по-прежнему отражает исходное зависимое от времени изменение измеряемой физической характеристики и позволяет впоследствии извлечь результаты измерений из своих параметров, например, частоты, амплитуды, затухания амплитуды, частотного спектра и/или других параметров, такая аналитическая функция может по-прежнему считаться первичными данными.
В предпочтительном варианте осуществления расстояние между любым из датчиков и устройством управления данными превышает 10 км. Расстояние между датчиком и УУД определяется как кратчайшее расстояние по прямой между датчиком и УУД. В более предпочтительном варианте расстояние превышает 100 км, в еще более предпочтительном варианте расстояние превышает 1000 км. Предпочтительная ССДУ выполнена с возможностью управления данными, поступающими от датчиков, распределенных по всей национальной сети железных дорог, более предпочтительно - по сети железных дорог всего континента, еще более предпочтительно - по мировой сети железных дорог. Большое расстояние между датчиками и УУД выгодно тем, что оно позволяет эксплуатировать ССДУ в очень больших железнодорожных сетях с большими расстояниями между датчиками и УУД. Альтернативное осуществление ССДУ может содержать более одного УУД, которое может использоваться в качестве резервной системы или для увеличения мощности обработки с целью оценки сигналов датчиков. В другом альтернативном варианте осуществления расстояние между любым из датчиков и УУД составляет менее 10 км, предпочтительно - менее 1 км. Предпочтительно УУД расположено стационарно, т.е. оно не перемещается в процессе работы. В альтернативном варианте осуществления УУД подвижно, т.е. его местоположение может быть изменено, например, при использовании в качестве УУД портативного компьютера.
В предпочтительном варианте осуществления изобретения кратчайшее расстояние между двумя датчиками превышает 10 м. Согласно изобретению расстояние между двумя датчиками является кратчайшим расстоянием по прямой между двумя датчиками. Предпочтительно расстояние между двумя и более датчиками превышает 10 м, более предпочтительно расстояние между любой парой из двух датчиков превышает 10 м. В другом предпочтительном варианте осуществления кратчайшее расстояние между двумя датчиками превышает 50 м, в еще более предпочтительном варианте - 100 м. Для надежного измерения веса отдельных рельсовых транспортных средств и/или каждого рельсового транспортного средства в составе поезда датчики могут быть расположены на расстояниях, превышающих кратчайшее расстояние между двумя колесными тележками рельсового транспортного средства. Указанные расстояния, предпочтительно позволяют точно измерять вес рельсовых транспортных средств. Еще одним преимуществом минимального расстояния между двумя вышеуказанными датчиками может быть сведение к минимуму перекрестных помех между датчиками. Это облегчает получение независимых результатов измерения веса рельсового транспортного средства. В альтернативном варианте осуществления кратчайшее расстояние между двумя датчиками меньше 10 м.
В предпочтительном варианте осуществления по меньшей мере один датчик выполнен с возможностью измерения изменения магнитных свойств рельса, обусловленного воздействием рельсового транспортного средства на рельс. Предпочтительно принцип работы датчика основан на обратном магнитострикционном эффекте, также называемом, эффекте Виллари. Предпочтительно этот эффект используют в сочетании с ферромагнитными рельсами. Предпочтительно подобный датчик устанавливают с помощью постоянных магнитов и/или электромагнитов, предпочтительно, непосредственно на боковой поверхности рельса или на опорной конструкции рельса. В предпочтительном варианте опорная конструкция выполнена из ферромагнитного материала. В альтернативном варианте осуществления по меньшей мере один датчик представляет собой тензометрический датчик. В предпочтительном варианте осуществления тензометрический датчик установлен на боковой поверхности рельса или на основании рельса. Этот тип датчика измеряет изгиб или удлинение рельса, вызванное весом или нагрузкой рельсовой транспортного средства. В другом предпочтительном варианте осуществления по меньшей мере один датчик измеряет давление, оказываемое на рельс. Предпочтительно датчик может быть установлен на шпалах или на основании рельса. В другом предпочтительном варианте осуществления по меньшей мере один датчик расположен на свободно перемещающемся участке рельсового пути таким образом, чтобы он мог измерять вертикальное смещение пути для определения веса рельсового транспортного средства. Например предпочтительный тензометрический датчик содержит оптическое волокно, в состав которого входит одна или более волоконных решеток Брэгга. В таком варианте очень легко объединить передатчик, датчик и средства передачи данных в компактном модуле. В другом предпочтительном варианте осуществления, по меньшей мере, один датчик выполнен с возможностью измерения деформации рельса, обусловленной нагрузкой рельсового транспортного средства, опирающегося на рельс, или теплового расширения/сжатия рельса, например, вследствие изменения температуры. Предпочтительно датчик выполнен с возможностью измерения крутящего момента, приложенного к рельсу движущимся рельсовым транспортным средством. В другом предпочтительном варианте датчик выполнен с возможностью измерения сжатия рельса, обусловленного весом рельсового транспортного средства, опирающегося на рельс, причем вес может представлять собой комбинацию действующих на рельс статических и/или динамических сил, обусловленных тяжелой и/или инертной массой рельсового транспортного средства. В другом предпочтительном варианте датчик измеряет ускорение рельса. Предпочтительно такой датчик, например, акселерометр, может распознавать колебания рельса, вызванные рельсовыми транспортными средствами или сейсмической активностью.
В предпочтительном варианте осуществления по меньшей мере один датчик содержит локальное запоминающее устройство, выполненное с возможностью локального хранения сигналов датчиков. Это может быть выгодно возможностью хранения резервной копии на случай потери передаваемого сигнала датчика, например, из-за выхода из строя передатчика или средств передачи данных в УУД. В предпочтительном варианте осуществления такое запоминающее устройство используется в качестве кэш-памяти, в которой хранятся сигналы датчиков. Предпочтительно сигналы датчиков сохраняются в запоминающем устройстве с отметкой времени. Предпочтительно кэшированные сигналы датчиков впоследствии передаются пакетом с целью ограничения расхода энергии или для предотвращения перехвата данных. В предпочтительном варианте осуществления сигналы датчиков передаются с фиксированной периодичностью или в определенные моменты времени, предпочтительно один раз в час, более предпочтительно только один раз в день и/или только, например, в 12 часов. Это позволяет сэкономить энергию, а в случае питания датчиков от аккумуляторов - удлинить период между заменой аккумуляторных батарей. В другом предпочтительном варианте осуществления УУД запрашивает и/или забирает сохраненные сигналы датчиков из запоминающего устройства датчика. Это выгодно тем, что УУД может инициировать передачу сигнала, а прием сигналов датчиков может быть мгновенно верифицирован УУД. В предпочтительном варианте осуществления передача сигнала от датчиков к УУД осуществляется последовательно, например, если большое количество датчиков передает сигналы в УУД, то, как правило, одновременный прием всех сигналов невозможен. В предпочтительном варианте запоминающее устройство реализовано в виде энергонезависимого запоминающего устройства, например, флэш-памяти, жесткого диска компьютера, магнитофона и/или любых других средств хранения сигналов датчиков для дальнейшей обработки и/или передачи, и/или предоставления доступа к сигналам датчиков к пользователю. Кроме того, предпочтительно все сигналы датчиков передаются в УУД с уникальным кодом, что позволяет определить датчик, сгенерировавший сигнал.
В предпочтительном варианте осуществления по меньшей мере один датчик выполнен с возможностью передачи сигналов в УУД в режиме реального времени. Эта функция выгодным образом позволяет в режиме реального времени следить за поездом, проходящим мимо различных датчиков. Предпочтительно УУД добавляет отметку времени к датчику после приема данных. Поскольку передача не занимает значительного количества времени, УУД присваивает отметку времени вскоре после отправки сигнала датчика. В альтернативном варианте осуществления отметка времени добавляется к сигналу самим датчиком. В этом случае необходимость в передаче данных в режиме реального времени может отсутствовать. Это выгодно тем, что позволяет упростить протоколы передачи сигнала. В альтернативном варианте вышеописанные способы передачи сигналов могут быть использованы при пакетной передаче сигналов датчиков в УУД или при запросе, или захвате сигналов устройством УУД. В предпочтительном варианте осуществления изменение сигнала датчика с течением времени полностью записывается в режиме реального времени. Это означает, что каждый элемент данных сигнала передается датчиком в режиме реального времени. Предпочтительно каждый элемент данных также принимается УУД в режиме реального времени.
В предпочтительном варианте осуществления по меньшей мере один датчик выполнен с возможностью приема сигналов от другого датчика и передачи сигналов датчиков в устройство управления данными. Этот способ позволяет передавать данные от датчика в УУД путем ретрансляции промежуточным датчиком. Этот способ позволяет устанавливать соединение между датчиком и УУД в том случае, если прямое соединение не может быть реализовано, например, вследствие удаленного расположения датчика. В предпочтительном исполнении датчик, используемый для ретрансляции сигналов датчиков, содержит локальное запоминающее устройство и, предпочтительно, приемник данных дополнительно к передатчику. Предпочтительно в группе из двух или более датчиков, расположенных в точке измерения, один датчик выполнен с возможностью приема и передачи сигналов всех датчиков в этой точке измерения. В другом предпочтительном варианте осуществления специализированное устройство, в дальнейшем называемое «концентратором», устанавливают в точке измерения для приема сигналов от датчиков и передачи сигналов датчиков в УУД. Возможное преимущество этого варианта заключается в том, что каждому датчику требуется передавать сигналы только на концентратор. Концентратор, выполненный с возможностью приема сигналов от датчиков и их передачи в устройство управления данными, может быть оптимизирован под эту задачу и, предпочтительно, содержит более мощные и/или надежные средства передачи сигналов датчиков. В предпочтительном варианте концентратор дополнительно содержит запоминающее устройство, выгодным образом позволяющее концентратору кэшировать и/или сохранять сигналы датчиков перед их передачей в устройство управления данными.
В предпочтительном способе измерения веса движущегося поезда, содержащего по меньшей мере один вагон неизвестного веса и локомотив известного веса, толкающий или тянущий поезд, единственный датчик веса устанавливают на рельс, служащий опорой для поезда, причем способ содержит этап, на котором вес железнодорожного вагона неизвестного веса вычисляется путем сравнения сигнала датчика, сгенерированного указанным вагоном, с сигналом датчика, сгенерированным локомотивом известного веса. Таким образом, сигнал датчика, сгенерированный локомотивом, эффективно используется для калибровки датчика, поскольку сигнал датчика, обусловленный известной массой, сравнивается с сигналом датчика, обусловленным неизвестной массой.
В предпочтительном варианте осуществления датчики обмениваются данными с УУД через сеть. Предпочтительно сеть содержит один или более элементов из следующего списка: информационная сеть на базе интернета; параллельная или последовательная шина; информационная сеть на базе сотовой радиотелефонной системы. Предпочтительно сеть реализуют с использованием комбинации вышеупомянутых элементов. В предпочтительном варианте осуществления параллельная шина выполнена в виде интерфейса GPIB. В другом предпочтительном варианте осуществления реализована последовательная шина, например, USB или RS232. В предпочтительных вариантах осуществления сети реализуют с использованием сотовой радиотелефонной сети, например, GSM, UMTS или LTE (второе, третье или четвертое поколение мобильных сетей). Более предпочтительны сети на базе интернета. Предпочтительно интернет-сеть реализована с помощью оптоволоконных сетевых кабелей и/или медных кабелей. В данном случае преимущество может заключаться в том, что такие сотовые сети и сети на основе интернета коммерчески доступны и не требуют разработки специально для системы сбора данных и управления ими.
В предпочтительном варианте способа оценки сигналов датчиков результаты измерений, полученные после объединения и/или сравнения по меньшей мере двух элементов данных одного или более сохраненных сигналов датчиков, содержит один или более параметров из следующего списка: количество осей рельсового транспортного средства, дисбаланс распределения нагрузки в рельсовом транспортном средстве, механический износ колес рельсового транспортного средства, количество рельсовых транспортных средств в составе поезда, информация о весе рельсового транспортного средства, информация о скорости рельсового транспортного средства, информация об изменения веса рельсового транспортного средства, время прибытия рельсового транспортного средства на место установки датчика и функция калибровки. Кроме того, УУД может выполнять более сложные расчеты. Калибровка датчика может занимать очень много времени, и может потребоваться повторять калибровку с регулярной периодичностью. Централизованная оценка первичных данных позволяет сравнивать результаты и/или элементы данных, полученные от различных датчиков для одного рельсового транспортного средства. Это позволяет устранить систематические ошибки. Например может быть обнаружено, что конкретный датчик всегда генерирует сигнал с более низким значением, чем значение сигнала другого датчика.
Предпочтительно один или более датчиков объединены в измерительный прибор. Предпочтительно измерительный прибор содержит одну или более электронных схем, предназначенных, например, для усиления сигнала и/или преобразования аналоговых сигналов в цифровые сигналы, а также передатчик. Обычно датчики одного измерительного устройства реагируют на одно и то же событие, например, на вагон, проходящий мимо прибора в данный момент времени. Прохождение одного вагона мимо измерительного прибора в два различных момента времени вызовет два различных события. Обычно измерительный прибор содержит четыре датчика в двух отдельных корпусах. Предпочтительно два корпуса устанавливают на рельсовом пути, по одному корпусу на каждом рельсе пути. Предпочтительно корпуса располагают на воображаемой линии, перпендикулярной рельсам рельсового пути.
Краткое описание чертежей
Изобретение более подробно проиллюстрировано с помощью схематических чертежей, на которых:
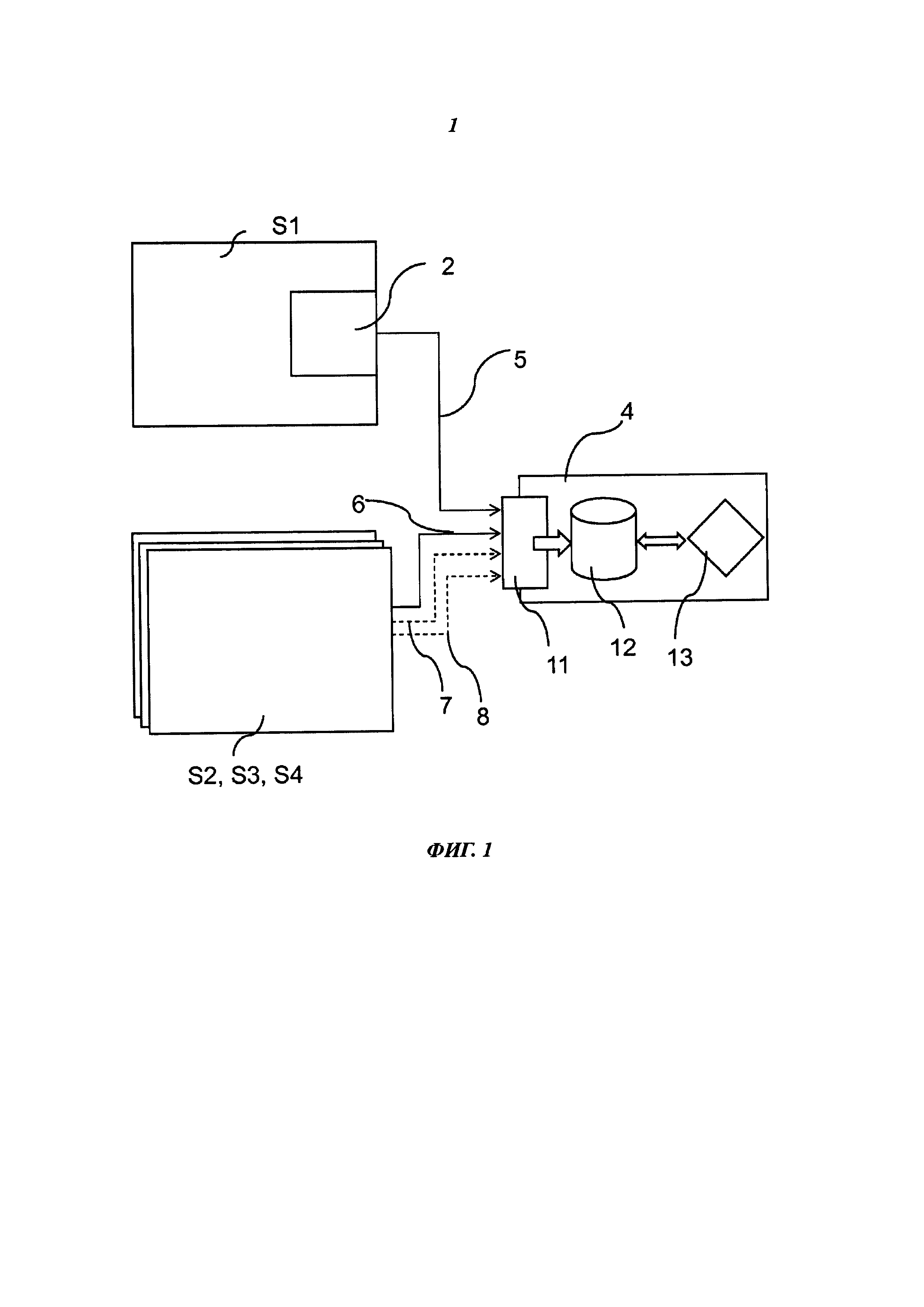
на фиг. 1 представлена подробная схема способа оценки сигналов датчиков;
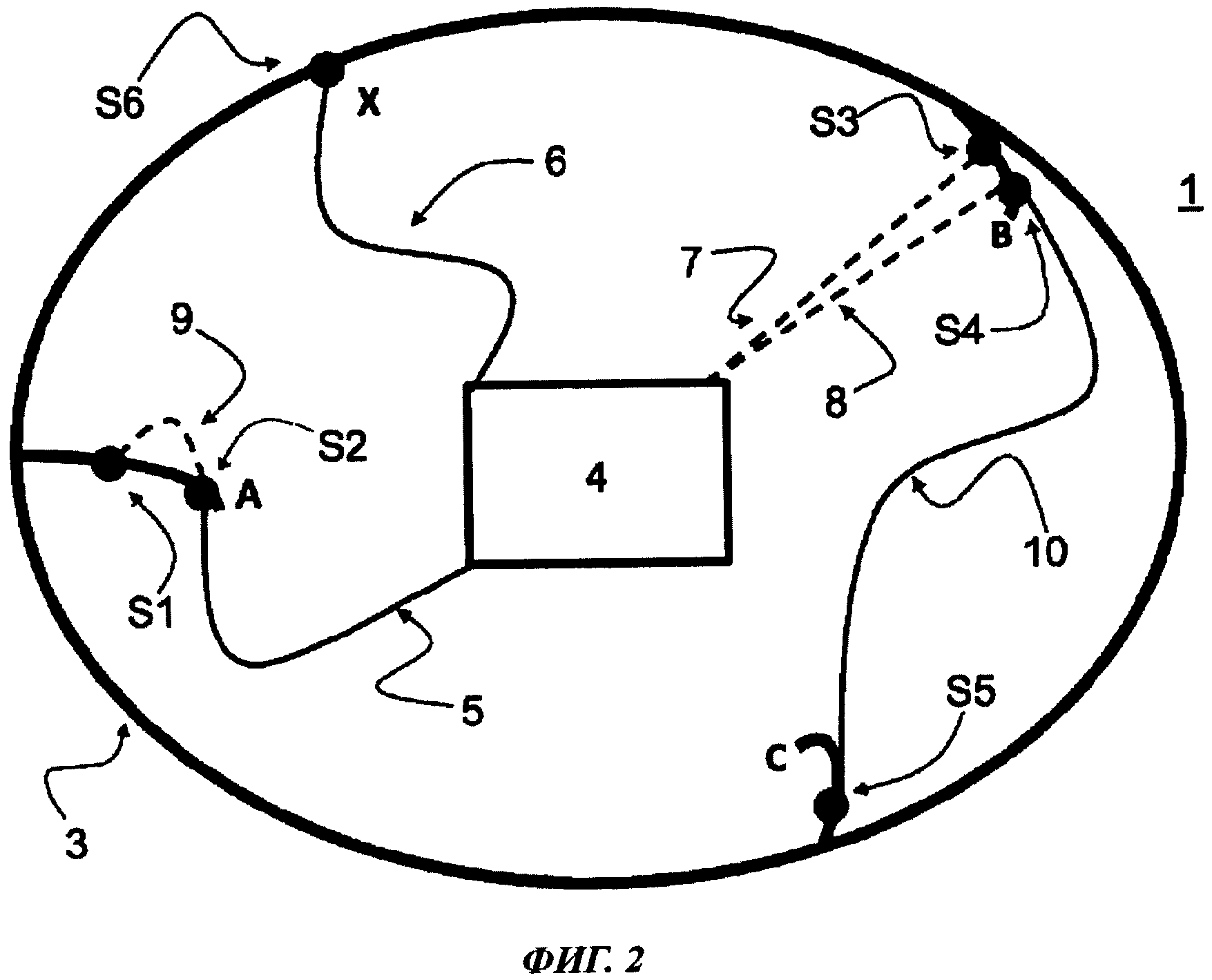
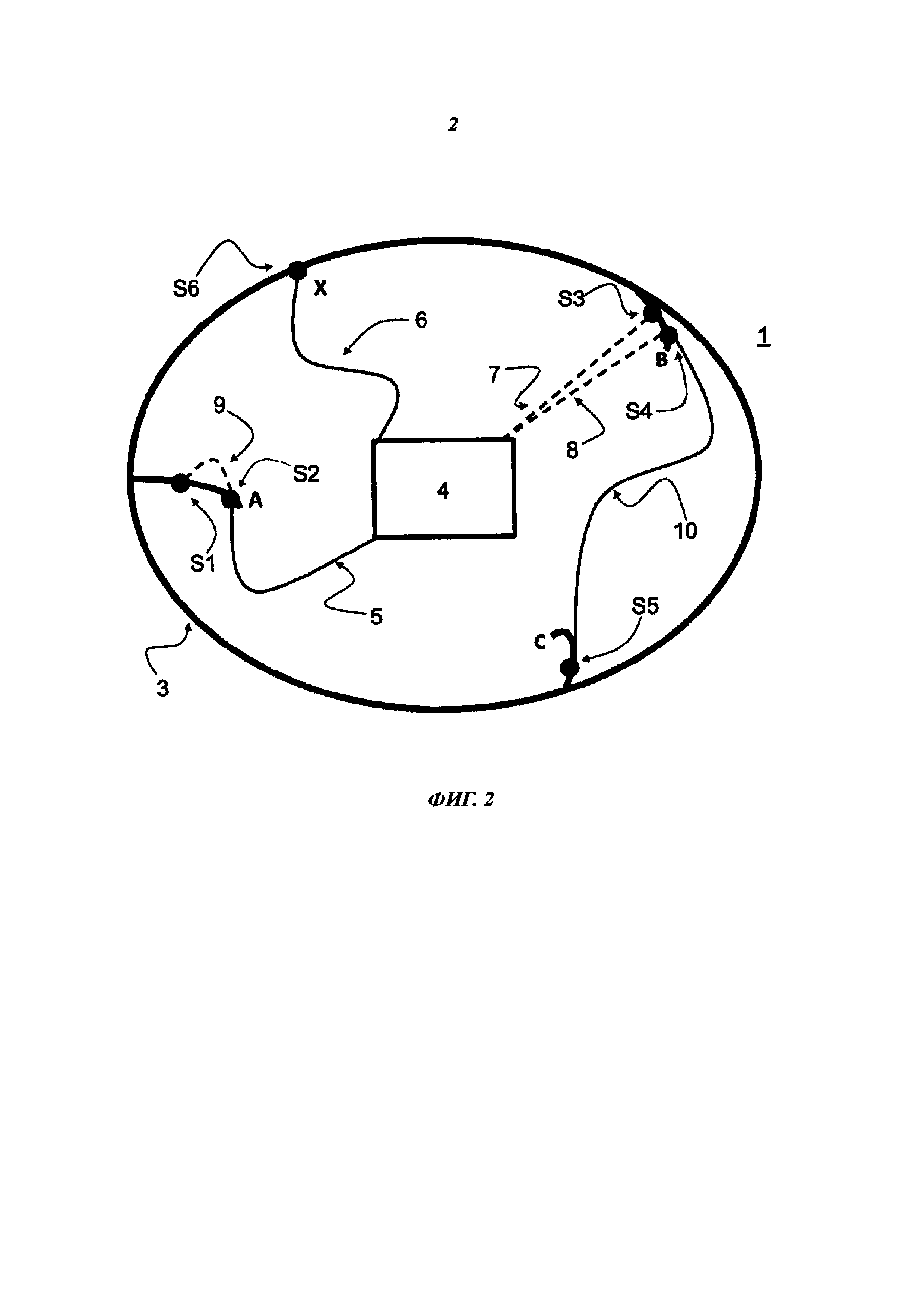
на фиг. 2 представлена реализация системы сбора данных и управления ими в железнодорожной транспортной системе в соответствии с одним из вариантов осуществления настоящего изобретения.
Подробное раскрытие вариантов осуществления изобретения
На фиг. 1 представлен способ оценки сигналов датчиков. Изображены четыре датчика S1, S2, S3, S4, выполненных с возможностью измерения деформации рельса, вызванной нагрузкой от рельсового транспортного средства, опирающегося на рельс, а также устройство 4 управления данными (УУД). Датчик S1 показан более подробно. Он содержит передатчик 2, выполненный с возможностью передачи сигналов датчиков в УУД 4. Четыре датчика передают сигналы датчиков в УУД 4 через проводные соединения 5, 6 или беспроводные соединения 7, 8. УУД 4 содержит приемник 11, выполненный с возможностью приема сигналов от четырех датчиков, запоминающее устройство 12, предназначенное для сохранения принятых сигналов датчиков, и процессор 13, предназначенный для оценки сохраненных сигналов датчиков. Кроме того, в запоминающем устройстве 12 сохраняются результаты измерений. Датчик S1 установлен на рельсе (не показан), входящем в состав железнодорожной транспортной системы. Датчик S1 выполнен с возможностью измерения изменения магнитных свойств рельса в зависимости от деформации рельса, вызванной нагрузкой на рельс. Локомотив, тянущий состав грузовых вагонов, движется по рельсовому пути. Когда локомотив известного веса проходит мимо датчика S1, сигнал генерируется и передается в УУД 4. УУД 4 принимает сигнал и сохраняет его в запоминающем устройстве 12. Сигнал датчика пропорционален деформации рельса и представлен множеством элементов данных, генерируемых во время события. Частота дискретизации составляет 1 кГц, что означает генерирование 1000 элементов данных ежесекундно. Дополнительно к первичным данным сигнал содержит метаданные с информацией о времени измерения, расположении датчика и идентификаторе поезда. После того, как локомотив и вагоны пройдут мимо датчика и сгенерируют подобные сигналы, каждый сигнал будет содержать первичные данные и метаданные. Процессор 13 УУД 4 оценивает сигналы путем подсчета веса каждого транспортного средства, количества осей, вибрации в рельсах и других результатов измерений, представляющих интерес в сигналах датчиков. Калибровка датчика S1 для использования в качестве датчика веса подтверждается сравнением результата измеренного веса локомотива с известным весом локомотива. Эту калибровку затем используют для определения веса каждого грузового вагона.
В ста километрах дальше на путь устанавливают другой датчик S2, работающий аналогично датчику S1. Здесь повторяется процедура измерения, предусмотренная для датчика S1. После завершения измерения результаты S2 сравнивают с результатами S1 в УУД 4. Сначала калибровку обоих датчиков подтверждают путем сравнения двух измерений на локомотиве, выполненных двумя датчиками S1 и S2. Затем сравнивают сигналы, обусловленные весом железнодорожных вагонов. Разница в весе вагона может указывать на потерю груза. В этом случае УУД 4 может посылать сообщение, например, в виде SMS, машинисту поезда, предупреждая его о потере груза. На основании метаданных УУД 4 вычисляет время движения поезда, сравнивая отметки времени, присвоенные сигналам датчиков для локомотива на датчиках S1 и S2. Так как расстояние между двумя датчиками S1 и S2 известно, можно также вычислить среднюю скорость. Все вычисленные результаты снова сохраняются в запоминающем устройстве 12 вместе с исходными сигналами датчиков, которые можно использовать в будущем для сравнения сигналов датчиков и обнаружения возможного смещения или неисправности датчика.
На фиг. 2 представлен вариант осуществления системы 1 сбора данных и управления ими (ССДУ) в железнодорожной транспортной системе в соответствии с изобретением. Схематическое изображение дано не в масштабе. Изображенная ССДУ 1 способна измерять деформацию рельса, вызванную нагрузкой, обусловленной движущимся по рельсу рельсовым транспортным средством. Сгенерированный сигнал может содержать информацию о различных физических свойствах рельсового транспортного средства, в частности, о его массе, дисбалансе его колес или вибрациях, вызванных в рельсах или транспортном средстве. Для этого система содержит шесть датчиков S1-S6, устанавливаемых на рельсе 3 в целях измерения, в том числе, веса рельсового транспортного средства. В данном случае рельс 3 представляет собой ферромагнитный рельс, по существу, кольцевой железной дороги. В этом варианте осуществления рельсовое транспортное средство представляет собой железнодорожный состав (не показан), содержащий вагоны-хопперы, перевозящие уголь. Уголь добывается в угольной шахте С и должен транспортироваться по кольцевой железной дороге к точкам А и В переработки угля. Три точки А, В и С измерения расположены на разъездах кольцевой железной дороги. Промежуточная точка X измерения будет рассмотрена позже. Каждая точка измерения содержит один или более датчиков S1-S6, предназначенных для измерения веса рельсового транспортного средства. В этом случае датчики S1-S5 в точках А, В и С измерения выполнены с возможностью измерения изменения магнитной характеристики, вызванного изгибом ферромагнитного рельса под воздействием нагрузки на рельс. Основной физический эффект этого изменения называют обратным магнитострикционным эффектом. Датчик S6 в точке X измерения представляет собой тензометрический датчик, непосредственно измеряющий механическую деформацию рельса 3. Кроме того, каждый датчик S1-S6 выполнен с возможностью генерирования сигналов в виде первичных данных, подавая электрический ток в зависимости от нагрузки на рельс, и с возможностью преобразования электрического тока в сигнал, который может быть передан на центральное устройство управления данными, которое будет рассмотрено позже.
Расстояние между точками А, В и С составляет около 80 км в случае измерения по ходу трассы и примерно 50 км по прямой. Расстояние между двумя датчиками S1 и S2 в точке А измерения составляет 15 метров. Балластный слой в этом месте имеет довольно жесткую структуру. Таким образом, для получения более точных результатов предпочтительно измерять изгиб рельса 3 под нагрузкой на большем протяжении рельса 3. В точке В измерения железнодорожное полотно уложено на илистый грунт, который отличается достаточной мягкостью. Таким образом, поскольку для достаточного изгиба хватит более короткого участка рельса 3, расстояние между двумя датчиками S3 и S4 составляет всего 2 метра.
ССДУ 1 содержит центральное устройство 4 управления данными (УУД). УУД удалено более чем на 10 км от каждой из точек А, В, С и X измерения. Четыре датчика S2, S3, S4 и S6 из датчиков, установленных на рельсе 3, содержат передатчики, передающие данные через соединение для передачи данных на указанное УУД 4. Соединение для передачи данных позволяет передавать сигналы от датчика в УУД. В одном из вариантов осуществления соединение для передачи данных между датчиком S2 в точке А и УУД устанавливают посредством первого проводного соединения 5. В данном варианте осуществления УУД 4 служит сетевым сервером. Датчик S6 в точке X измерения также подключен к УУД 4 посредством проводного соединения, в частности, второго проводного соединения 6. Оба датчика S2 и S6 оснащены клеммой, к которой можно подсоединить провод. УУД 4 оснащено соответствующими клеммами, что позволяет соединять два датчика S2 и S6 с УУД 4 с меньшими усилиями.
Каждый из датчиков S3 и S4 в точке В измерения содержит устройство для установления беспроводного соединения, предназначенного для передачи данных в УУД 4. В данном варианте осуществления это реализуют через интерфейс двухточечного радиосоединения. УУД 4 также содержит интерфейс двухточечного радиосоединения, предназначенный для установления соединения для передачи данных между двумя датчиками S3 и S4 в точке В измерения и УУД 4. Эти соединения обозначены как первое беспроводное соединение 7 и второе беспроводное соединение 8.
Четыре датчика в данном варианте осуществления содержат устройство для установления соединения для передачи данных на другой датчик, а именно датчики S1, S2, S4 и S5. В этом варианте осуществления каждый датчик S1 и S2 в точке А измерения содержит устройства для установления третьего беспроводного соединения 9, предназначенного для передачи данных между ними. В этом случае соединение представляет собой беспроводное подключение к локальной сети по стандарту 802.11g. Третье беспроводное соединение 9 используют для ретрансляции первичных данных от датчика S1 к датчику S2, подключенному к УУД 4 через первое проводное соединение 5. Таким образом, соединение для передачи данных реализовано в виде единственного соединения для передачи данных между точкой А измерения и УУД 4, даже если в этой точке измерения находятся два датчика S1 и S2. Это говорит о том, что число подключений к УУД 4 может оставаться небольшим даже при увеличении количества датчиков в точках измерения. Датчик S2 в точке А измерения, подсоединенный к УУД 4, содержит также локальное запоминающее устройство, предназначенное для хранения данных в точке А измерения. В этом случае в качестве локального запоминающего устройства используют жесткий диск. Он используется для кэширования первичных данных от обоих датчиков S1 и S2 в точке А измерения. Данные передаются в УУД 4 один раз в день после установления коммутируемого соединения между датчиком S2 и УУД 4 по первому проводному соединению 5. Кроме того, датчик S2 имеет локальный интерфейс, выполненный с возможностью локального считывания данных, например, в случае неисправности первого проводного соединения 5 с УУД 4. В данном случае предусмотрен последовательный разъем RS232, позволяющий скопировать данные, в частности, сохраненные данные измерений, с жесткого диска датчика S2 на портативный компьютер или аналогичное устройство.
В угольной шахте С датчик S5 веса расположен в довольно труднодоступной местности. Наличие гор в этом регионе не позволяет установить прямое проводное или беспроводное соединение между датчиком S5 и УУД 4. Кроме того, отправка обслуживающего персонала в угольную шахту С может быть значительно затруднена в холодное время года вследствие большого количества снега в этой области. Это означает, что обслуживание на месте и/или установление соединения для передачи данных в УУД 4 может быть связано с большими затратами средств и времени. Для решения этой проблемы датчик S5 в точке С оснащают устройством для установления соединения для передачи данных с другим датчиком, в данном случае, датчиком S4 в точке В измерения. В этом варианте осуществления датчик S5 в точке С измерения устанавливает соединение с датчиком S4 в точке В через третье проводное соединение 10, которое в данном случае представляет собой оптоволоконный кабель. Помимо соединения с УУД 4, датчик S4 содержит оптоволоконный интерфейс для установления соединения с датчиком S5 в точке С. Поскольку датчик S5 в точке С не имеет средств хранения первичных данных, он передает первичные данные в режиме реального времени на датчик S4 в точке В измерения. Для отслеживания этих измерений к первичным данным перед их передачей через соединение 10 для передачи данных добавляется отметка времени. Кроме того, каждый датчик добавляет к передаваемым сигналам уникальный код, позволяющий однозначно идентифицировать датчик, сгенерировавший сигнал, принятый УУД. Датчик S4 принимает данные от датчика S3 и сохраняет их в кэш-памяти, выполненной в виде локальной флэш-памяти. После этого первичные данные, содержащие отметку времени, передаются в УУД 4 через второе беспроводное соединение 8. Поэтому нет необходимости ни в установлении прямого соединения с УУД 4, ни в оснащении датчика S5 средствами для локального считывания данных. Такая схема позволяет сохранить низкие расходы на техническое обслуживание.
УУД 4, в данном варианте осуществления представляющее собой сетевой сервер, выполнено с возможностью централизованной записи данных, получаемых от датчиков S2, S3, S4 и S6. Данные от датчиков S1 и S5 принимаются опосредованно. Датчики S2, S3, S4 и S6 непосредственно соединены с УУД 4 и вместе с УУД 4 образуют сеть со звездообразной топологией. Запоминающее устройство, установленное в УУД 4, оснащено дисковым массивом с избыточностью информации (RAID1), улучшающим защиту от потери данных. Таким образом, УУД 4 может собирать и хранить все первичные данные со всех датчиков системы 1 сбора данных и управления ими в одном месте. Кроме того, оно способно оценивать первичные данные. Первичные данные оцениваются путем выполнения алгоритмов, реализованных в программном обеспечении процессора УУД 4. В этом случае УУД 4 запускает программные приложения, анализирующие полученные сигналы датчиков. Каждый сигнал, как правило, имеет вид колебательного сигнала с несколькими максимумами и минимумами. Используемое программное обеспечение извлекает параметры, в частности, максимальную амплитуду и затухание сигнала. При помощи преобразования Фурье раскрывается частотный спектр сигнала. Это позволяет вычислять различные физические характеристики рельсового транспортного средства, например, массу, распределение нагрузки и скорость. Используя, например, информацию о массе, программное обеспечение УУД 4 может также идентифицировать различные поезда, движущиеся по рельсовой транспортной системе, по их удельной массе. Объединив информацию отметок местоположения и времени и, таким образом, времени прибытия поезда или рельсового транспортного средства в точки А, В, С и X с известными расстояниями между точками, можно определить время в пути и, следовательно, зная длину пути, среднюю скорость этих поездов. УУД сохраняет вычисленные результаты измерения и открывает доступ к ним для пользователя, которым может являться заказчик. Доступ к результатам такого вычисления для пользователя может быть реализован через пользовательский интерфейс на основе браузера. В этом варианте осуществления владельцы угольной шахты С и участков А и В обработки заказали базовый пакет услуг, позволяющий им получить доступ только к информации о весе с датчиков S1-S6 с помощью пользовательского интерфейса на основе браузера. Обновив контракт на оказание услуг за дополнительную плату, заказчики могут также получить доступ к результатам измерений, относящимся к времени в пути и средней скорости поездов. Таким образом, провайдер такой ССДУ 1 может предложить заказчикам гибкую модульную схему ценообразования, соответствующую потребностям заказчиков в конкретной информации.
Еще одна услуга, предоставляемая провайдером УУД 4, заключается в калибровке датчиков, недавно добавленных в рельсовую транспортную систему. Таким образом, УУД 4 выполнено с возможностью калибровки датчиков рельсовой транспортной системы. В этом варианте осуществления датчик S6 в точке X измерения, в данном случае представляющий собой механический тензометрический датчик, оснащенный соединением для передачи данных, был недавно добавлен в систему для промежуточного измерения поездов между точками А и В. Это позволяет отслеживать среднюю скорость поездов, движущихся между точками А и В, с повышенной точностью. Датчик S6 в точке X измерения непосредственно подсоединен к УУД 4 через второе проводное соединение 6. После установки датчика S6 в УУД в точке X его необходимо откалибровать, что означает необходимость связать определенную механическую деформацию рельса 3 с определенной нагрузкой на рельс 3. В обычной рельсовой транспортной системе обслуживающему персоналу придется калибровать датчик S6 на месте установки, что может занять много времени и увеличить расходы на техническое обслуживание. При наличии УУД 4 становится возможной дистанционная калибровка. Например поезд, выходящий с угольной шахты С, проходит через датчик S5 в DAA точки С. После этого первичные данные передаются в УУД 4 через третье проводное соединение 10, датчик S4 в точке В и второе беспроводное соединение 8. Затем УУД 4 вычисляет массу поезда, равную 2000 тонн. Впоследствии тот же поезд проходит точку X измерения, и некалиброванный датчик S6 передает первичные данные в УУД 4. Используя предварительно вычисленную массу поезда, функция калибровки датчика S6 может быть централизованно сформирована в УУД 4. Таким образом, становится возможным калибровать вновь добавленные датчики, не выезжая на место установки. Другой способ калибровки предусматривает использование рельсового транспортного средства известной массы. Это может быть электровоз, имеющий очень стабильную массу, или локомотив с дизельным двигателем, заправленный известным количеством топлива. Например состав с электровозом и несколькими хопперами с углем проходит точку измерения с одним датчиком. Первый набор сигналов датчиков генерируется, когда локомотив проходит мимо датчика. УУД 4 принимает сигналы и сохраняет их в качестве опорных сигналов. Затем сигналы датчиков генерируются для каждого угольного хоппера и передаются в УУД 4. Эти сигналы также сохраняются в УУД 4. Первый набор сигналов датчиков можно использовать для формирования функции калибровки датчика, так как масса локомотива известна. Затем УУД 4 оценивает сигналы измерений угольных хопперов, сравнивая соответствующие сигналы датчиков с сигналами датчиков от локомотива. Это позволяет вычислить массу угольных хопперов. Такие результаты измерений также сохраняются в памяти УУД 4.
Обычно для калибровки датчика требуется выполнить несколько измерений, поскольку нужно определить сдвиг и наклон калибровочной функции. Используя систему 1 сбора данных и управления ими, эту операцию можно повторить с архивными данными, так как все сигналы датчиков записываются и могут быть сохранены вместе со вторичными данными или метаданными, идентифицирующими поезд или рельсовое транспортное средство. Сравнивая результаты с различных датчиков, можно дополнительно улучшить калибровку и идентифицировать неисправные датчики по большим расхождениям между измерениями (например, если три из четырех точек измерений сообщают о весе в 2000 тонн, а четвертая точка измерения передает информацию о весе в 2700 тонн).
Раскрытый выше вариант осуществления, представленный на фиг. 1, демонстрирует некоторые из преимуществ, которые могут быть достигнуты за счет внедрения в рельсовую транспортную систему ССДУ 1, способной определять несколько различных физических характеристик рельсового транспортного средства в соответствии с изобретением. Например возможна передача или обмен данными измерений через соединения для передачи данных между различными датчиками S1, S2, S4, S5 и/или датчиками S2, S3, S4, S6 и УУД 4. Кроме того, расчеты могут выполняться централизованно в УУД 4 на основании собранных сигналов датчиков. Кроме того, калибровку датчиков S1-S6 можно упростить таким образом, чтобы снизить расходы на техническое обслуживание. Это позволяет получить измерительную систему с высокой степенью интеграции, которую можно использовать в коммерческих целях в самых разных областях, причем затраты в пересчете на точки измерения останутся низкими благодаря пониженной технической сложности датчиков в каждой точке.
Признаки, описанные в вышеприведенном описании, формуле изобретения и на чертежах, могут быть скомбинированы в любом сочетании. Ссылочные обозначения признаков в формуле изобретения введены исключительно для облегчения понимания формулы. Они никоим образом не ограничивают защищаемый объем изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 - система сбора данных и управления ими (ССДУ)
S1, 2, 3, 4, 5, 6 - датчики
А, В, С, X - места измерения
2 - передатчик
3 - рельс
4 - устройство управления данными (УУД)
5 - первое проводное соединение
6 - второе проводное соединение
7 - первое беспроводное соединение
8 - второе беспроводное соединение
9 - третье беспроводное соединение
10 - третье проводное соединение
11 - приемник
12 - запоминающее устройство
13 - процессор
Транспортная рельсовая система со средством взвешивания
Транспортная рельсовая система со средством взвешивания

