Результат интеллектуальной деятельности: СПОСОБЫ И СИСТЕМЫ ДЛЯ КОНТРОЛЯ ЗАГОТОВКИ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится, в целом, к неразрушающему контролю заготовок и, более конкретно, к способам и системам для автоматизированного контроля заготовки.
Для изготовления заготовки или узла может потребоваться использование нескольких деталей и инструментов. Желательно выполнять точный и надежный контроль узла во время и после его изготовления для обеспечения качества производства путем выявления возможных проблем, таких как ошибки при сборке, повреждение компонента при сборке и/или посторонний объект.
По меньшей мере в некоторых из известных случаев контроль узлов выполняется вручную. При выполнении такого контроля контролеры обычно используют визуальный и осязательный контроль совместно с личными знаниями для сравнения с расчетной моделью или расчетным графиком. Однако ручные проверки, в целом, требуют от контролеров визуального контроля заготовки, прикосновения к ней и осязания ее для обнаружения различий между узлом и моделью. Сам по себе ручной контроль заключает в себе возможность человеческой ошибки. Например, крупные собранные объекты, такие как летательные аппараты, поезда, автомобили и суда, могут содержать мелкие объекты на участках, имеющих ограниченный доступ, и контролерам, таким образом, может быть трудно осуществлять контроль в таких местах. Более того, ручной контроль может занимать много времени и/или требовать дорогостоящей высококвалифицированной рабочей силы. В некоторых случаях контролеры могут использовать малогабаритный инструмент оптического контроля, такой как бороскоп или рентгеновская технология, но и такие способы исследования заключают в себе возможность человеческой ошибки, поскольку требуют от контролеров визуального распознавания различий между заготовкой и моделью (эталоном). Более того, рентгеновская технология может использоваться только на ограниченной группе материалов, поскольку некоторые материалы не видны при использовании рентгеновской технологии.
В других известных способах контроля используется автоматическая обработка изображений для выполнения контроля. При проведении контроля происходит получение изображений заготовки и их анализ с использованием обработки изображений, так что отдельные признаки в пределах изображения сравниваются с библиотекой стандартных признаков. Признаки могут идентифицироваться с использованием подгонки к границе, совмещения цветов и изменения размеров гибких объектов. Однако такие способы контроля все еще могут вносить неточности при идентификации мелких деталей и при контроле объектов одного цвета. Более того, участки, которые могут быть осмотрены с использованием данных технологий, могут быть ограниченными.
Раскрытие изобретения
В одном аспекте предложен способ для контроля заготовки. Данный способ включает сохранение данных модели (эталона), связанных с заготовкой, в систему контроля, определение относительного положения измерителя удаленности по отношению к заготовке и калибровку точки обзора для системы контроля по отношению к модели на основании положения измерителя удаленности по отношению к заготовке. Способ также включает измерение данных о фактическом расстоянии удаленности по меньшей мере одного элемента отображения измерителя удаленности по отношению к заготовке и определение на основании данных о фактическом расстоянии удаленности, удовлетворяет ли заготовка предварительно установленным критериям контроля.
В другом аспекте предложена компьютерная система для контроля заготовки. Компьютерная система содержит процессор и машиночитаемое запоминающее устройство, имеющее закодированные в нем машиночитаемые инструкции, исполняемые процессором для выполнения функций. Процессор выполняет функции, включающие сохранение данных модели, связанных с заготовкой, в запоминающее устройство и определение относительного положения измерителя удаленности по отношению к заготовке. Процессор дополнительно выполняет функции, включающие калибровку точки обзора для компьютерной системы по отношению к модели на основании положения измерителя удаленности по отношению к заготовке. Процессор дополнительно выполняет функции, включающие измерение данных о фактическом расстоянии удаленности по меньшей мере одного элемента отображения измерителя удаленности по отношению к заготовке и определение на основании данных о фактическом расстоянии удаленности, удовлетворяет ли заготовка предварительно установленным критериям контроля.
В еще одном аспекте предложена система для контроля заготовки. Система содержит измеритель удаленности, выполненный с возможностью измерения данных о фактическом расстоянии удаленности по меньшей мере одного элемента отображения измерителя удаленности по отношению к заготовке. Система также содержит систему обнаружения позиции, выполненную с возможностью определения относительного положения измерителя удаленности по отношению к заготовке. Система также содержит компьютерную систему контроля, сообщающуюся с измерителем удаленности и системой обнаружения позиции. Система контроля запрограммирована на ввод данных модели, связанных с заготовкой, и калибровку точки обзора для системы контроля по отношению к модели на основании положения измерителя удаленности по отношению к заготовке. Система контроля также запрограммирована для определения на основании данных о фактическом расстоянии удаленности, удовлетворяет ли заготовка предварительно установленным критериям контроля.
В соответствии с аспектом настоящего изобретения предложен способ контроля заготовки, включающий сохранение данных модели, связанных с заготовкой, в систему контроля, определение относительного положения измерителя удаленности по отношению к заготовке, калибровку точки обзора для системы контроля по отношению к модели на основании положения измерителя удаленности по отношению к заготовке, измерение данных о фактическом расстоянии удаленности по меньшей мере одного элемента отображения измерителя удаленности по отношению к заготовке; и определение на основании данных о фактическом расстоянии удаленности, удовлетворяет ли заготовка предварительно установленным критериям контроля. Предпочтительно, сохранение данных модели включает сохранение данных модели системы компьютерного проектирования, сопоставляемых с заготовкой. Предпочтительно, сохранение данных модели может дополнительно включать ранее отсканированную модель заготовки.
Предпочтительно определение относительного положения измерителя удаленности включает задание начала координатной системы в заданном положении заготовки и определение положения измерителя удаленности по отношению к заготовке с использованием множества камер для определения положения. Предпочтительно, способ дополнительно включает передачу положения измерителя удаленности в систему контроля.
Предпочтительно, измерение фактического расстояния удаленности включает перемещение измерителя удаленности по отношению к заготовке для захвата множества фактических расстояний удаленности; при этом данный способ дополнительно включает сравнение множества фактических расстояний удаленности с множеством сопоставляемых им расстояний удаленности модели для идентификации неэквивалентных частей.
Предпочтительно, определение, основанное на данных о фактических расстояниях удаленности, дополнительно включает расчет данных расстояния удаленности модели для точки обзора системы контроля, где данные о расстоянии удаленности модели представляют расстояние удаленности модели от точки обзора системы контроля для модельной заготовки, определения того, отличается ли фактическое расстояние удаленности от расстояния удаленности модели; и определения, удовлетворяет ли отличие критериям контроля, когда фактическое расстояние удаленности отличается от расстояния удаленности, и указывает ли соответствие пороговому значению на то, что состояние заготовки является приемлемым. Дальнейший способ может включать отображение части заготовки, которая отсутствует в модельной заготовке, с использованием перекрытия (сегмента перекрытия, графической накладки), применяемого к обзору измерителя удаленности. Более того, перекрытие может быть выполнено с возможностью обеспечения иллюстрации наличия по меньшей мере одного из следующего: постороннего объекта, отсутствующего компонента, ошибки сборки и поврежденного компонента. Предпочтительно, измерение данных фактического расстояния удаленности дополнительно включает генерирование трехмерного облака точек.
В соответствии с другим аспектом настоящего изобретения, предложена компьютерная система для контроля заготовки, при этом указанная компьютерная система содержит процессор; а также машинно-читаемое устройство хранения, имеющее закодированные в нем машинно-читаемые инструкции, которые должны исполняться процессором для выполнения функций, включающих сохранение данных модели, связанных с заготовкой, в устройство хранения, определение относительного положения измерителя удаленности по отношению к заготовке, калибровку точки обзора для компьютерной системы по отношению к модели на основании положения измерителя удаленности по отношению к заготовке, измерение данных о фактическом расстоянии удаленности по меньшей мере одного элемента отображения измерителя удаленности по отношению к заготовке и определение на основании данных о фактическом расстоянии удаленности, удовлетворяет ли заготовка предварительно установленным критериям контроля.
Предпочтительно, функции, выполняемые процессором, дополнительно включают сохранение по меньшей мере одного из следующего: данных модели системы компьютерного проектирования, связанных с заготовкой, и ранее отсканированной модели заготовки. Предпочтительно, функции, выполняемые процессором, дополнительно включают расчет данных о расстоянии удаленности модели для точки обзора компьютерной системы, где данные о расстоянии удаленности модели представляют расстояние удаленности модели от точки обзора компьютерной системы для модельной заготовки, определение того, отличается ли фактическое расстояние удаленности от расстояния удаленности модели; и определение, удовлетворяет ли отличие критериям контроля, когда фактическое расстояние удаленности отличается от расстояния удаленности модели, и указывает ли соответствие пороговому значению на то, что состояние заготовки является приемлемым. Дальнейшие функции, выполняемые процессором, могут включать отображение части заготовки, которая отсутствует в модельной заготовке с использованием перекрытия, применяемого к обзору измерителя удаленности.
В соответствии с дополнительным аспектом настоящего изобретения, предложена система для контроля заготовки, при этом указанная система содержит измеритель удаленности, выполненный с возможностью измерения данных о фактическом расстоянии удаленности по меньшей мере одного элемента отображения измерителя удаленности по отношению к заготовке, систему обнаружения позиции, выполненную с возможностью определения положения измерителя удаленности по отношению к заготовке, и компьютерную систему контроля, сообщающуюся с измерителем удаленности и системой обнаружения позиции, компьютерную систему контроля, запрограммированную на сохранение данных модели, связанных с заготовкой, калибровку положения обзора для компьютерной системы контроля по отношению к модели на основании положения измерителя удаленности по отношению к заготовке, определение на основании данных о фактическом расстоянии удаленности, удовлетворяет ли заготовка предварительно установленным критериям контроля.
Предпочтительно, для сохранения данных модели компьютерная система контроля дополнительно запрограммирована на сохранение данных модели системы компьютерного проектирования, связанных с заготовкой. Далее, для сохранения данных модели компьютерная система контроля может быть запрограммирована для хранения ранее отсканированной модели заготовки.
Предпочтительно, компьютерная система контроля может быть дополнительно запрограммирована для расчета данных расстояния удаленности модели для точки обзора компьютерной системы контроля, в которой данные о расстоянии удаленности модели представляют собой расстояние удаленности модели из точки обзора компьютерной системы контроля для модельной заготовки, определения, отличается ли фактическое расстояние удаленности от расстояния удаленности модели, и установления, удовлетворяет ли указанное отличие критериям контроля, когда фактическое расстояние удаленности отличается от расстояния удаленности модели, где соответствие пороговому значению указывает на то, что заготовка находится в приемлемом состоянии. Далее, перекрытие может отображаться в режиме реального или квазиреального времени. И далее, компьютерная система контроля может быть выполнена с возможностью отображения части заготовки, которая отсутствует в модельной заготовке, с использованием перекрытия, применяемого к обзору измерителя удаленности.
Краткое описание чертежей
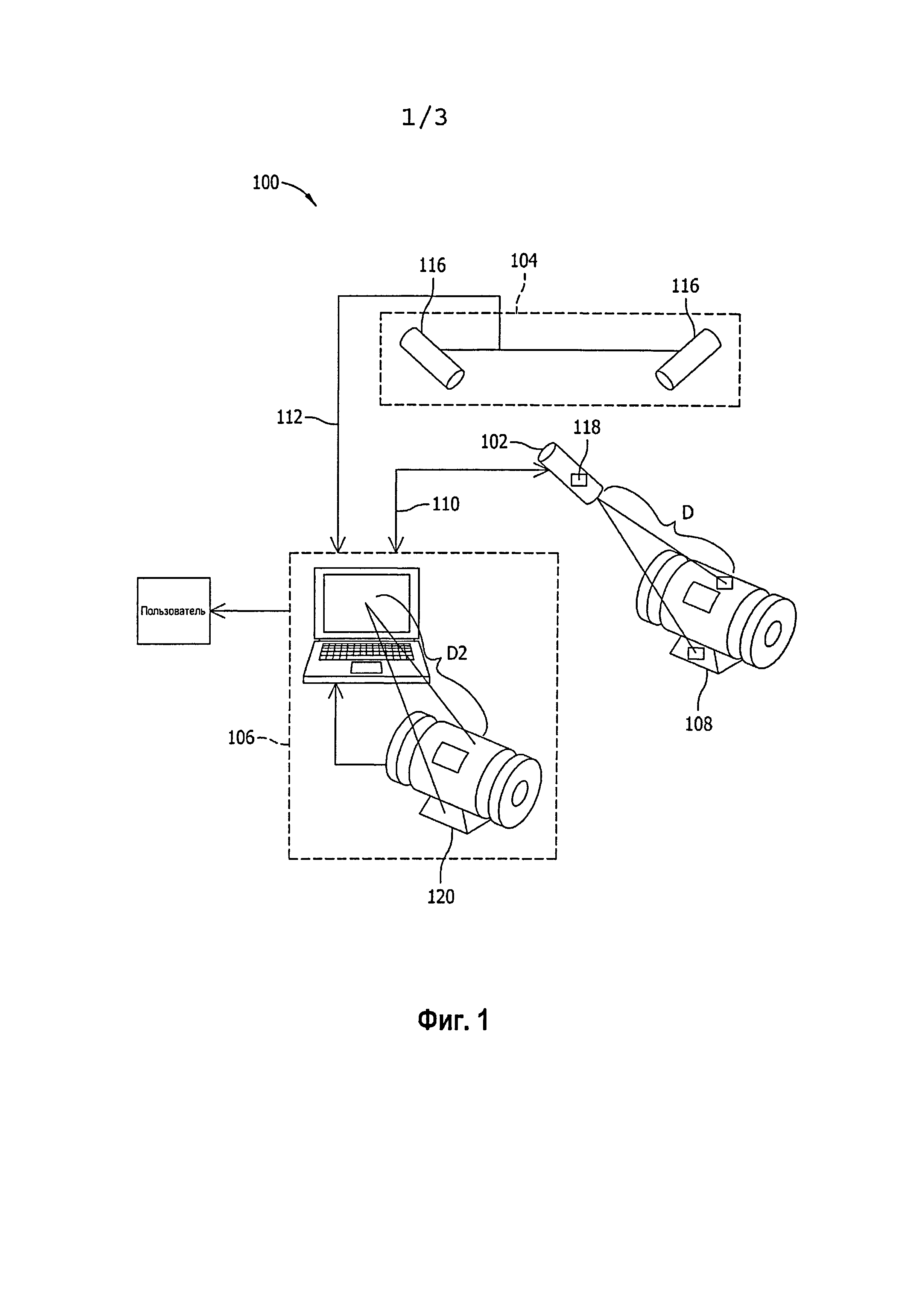
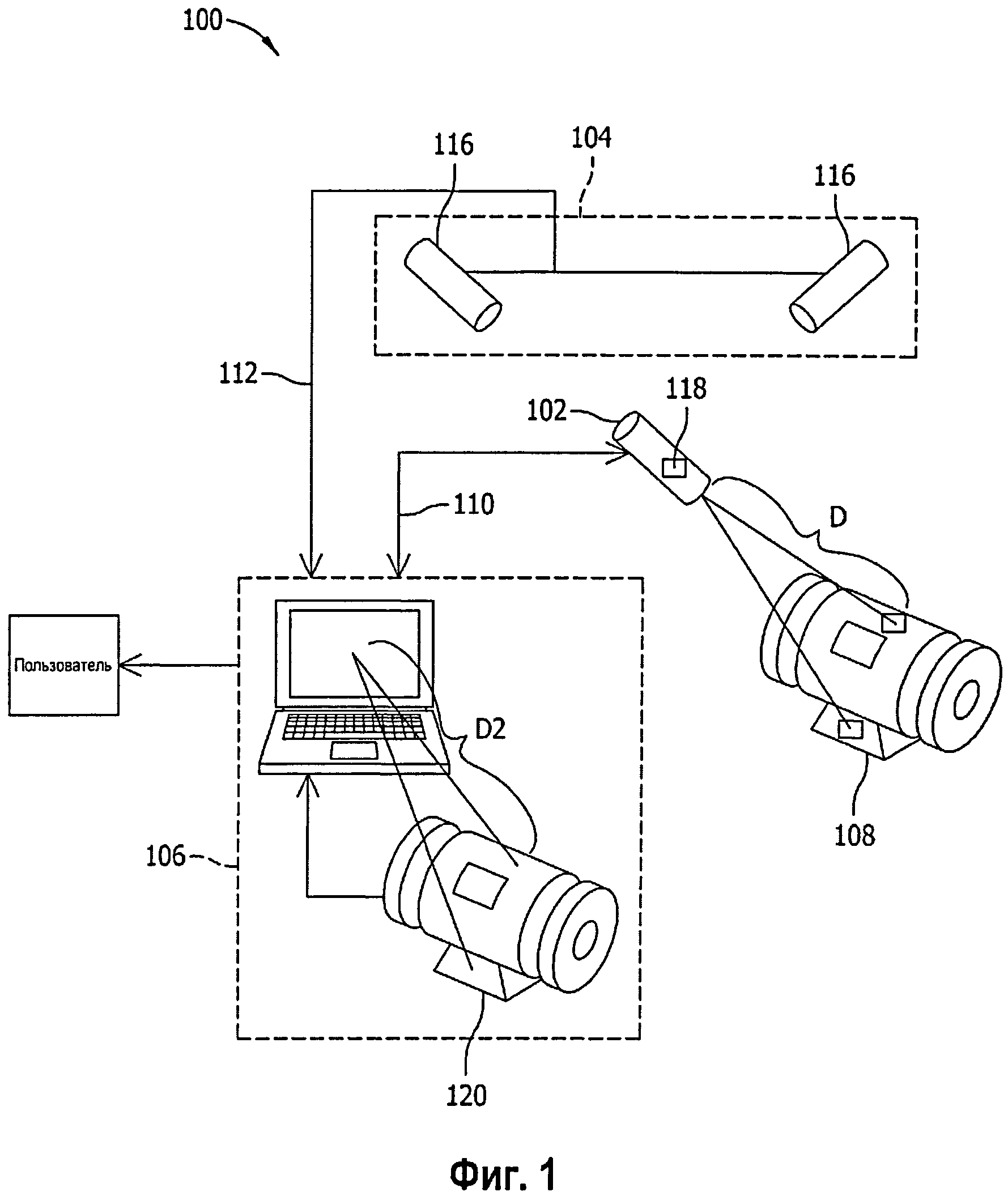
ФИГ. 1 - схематическая иллюстрация варианта реализации системы контроля.
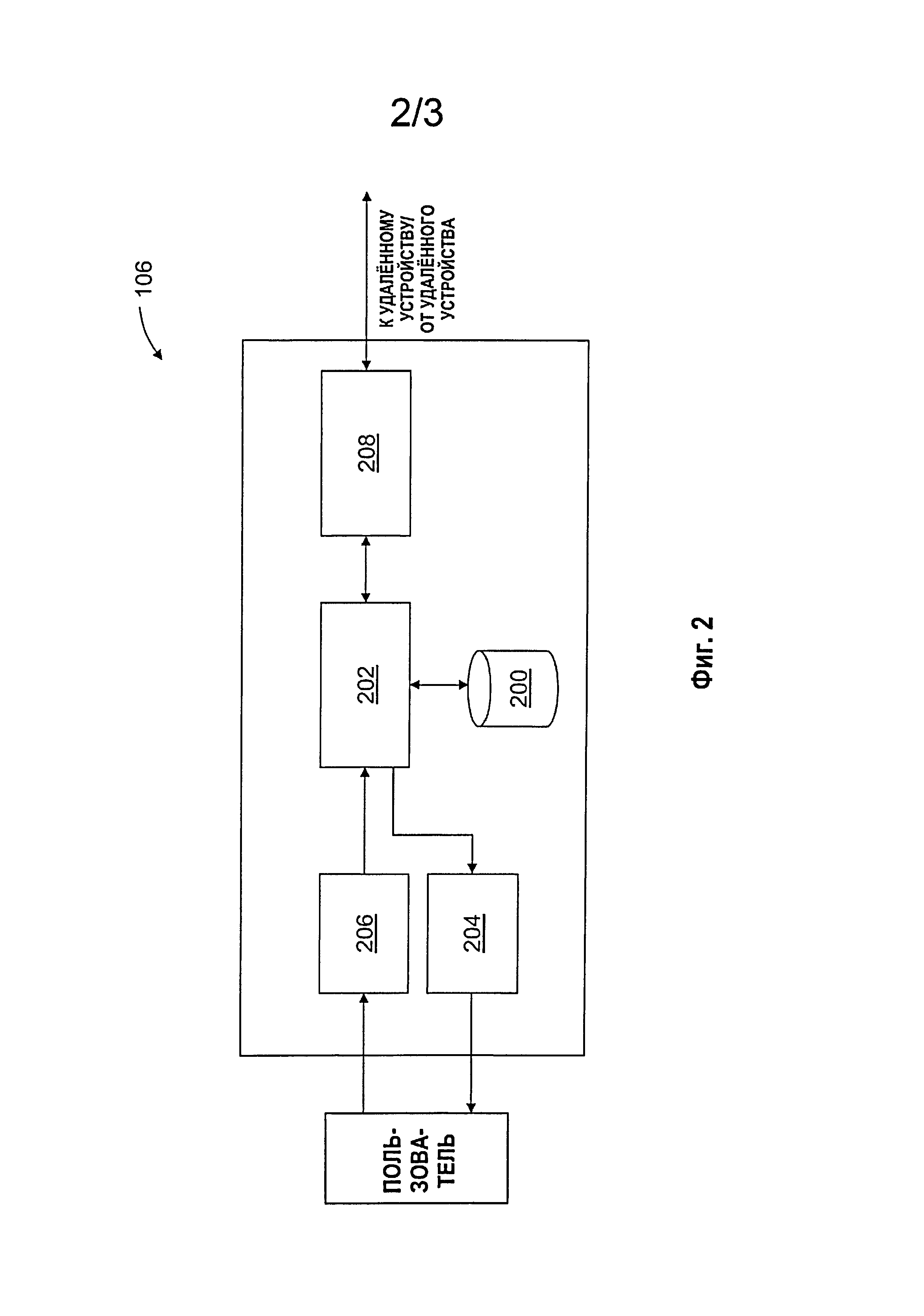
ФИГ. 2 - схематическая иллюстрация варианта реализации компьютерной системы контроля, которая может использоваться с системой контроля, показанной на ФИГ. 1.
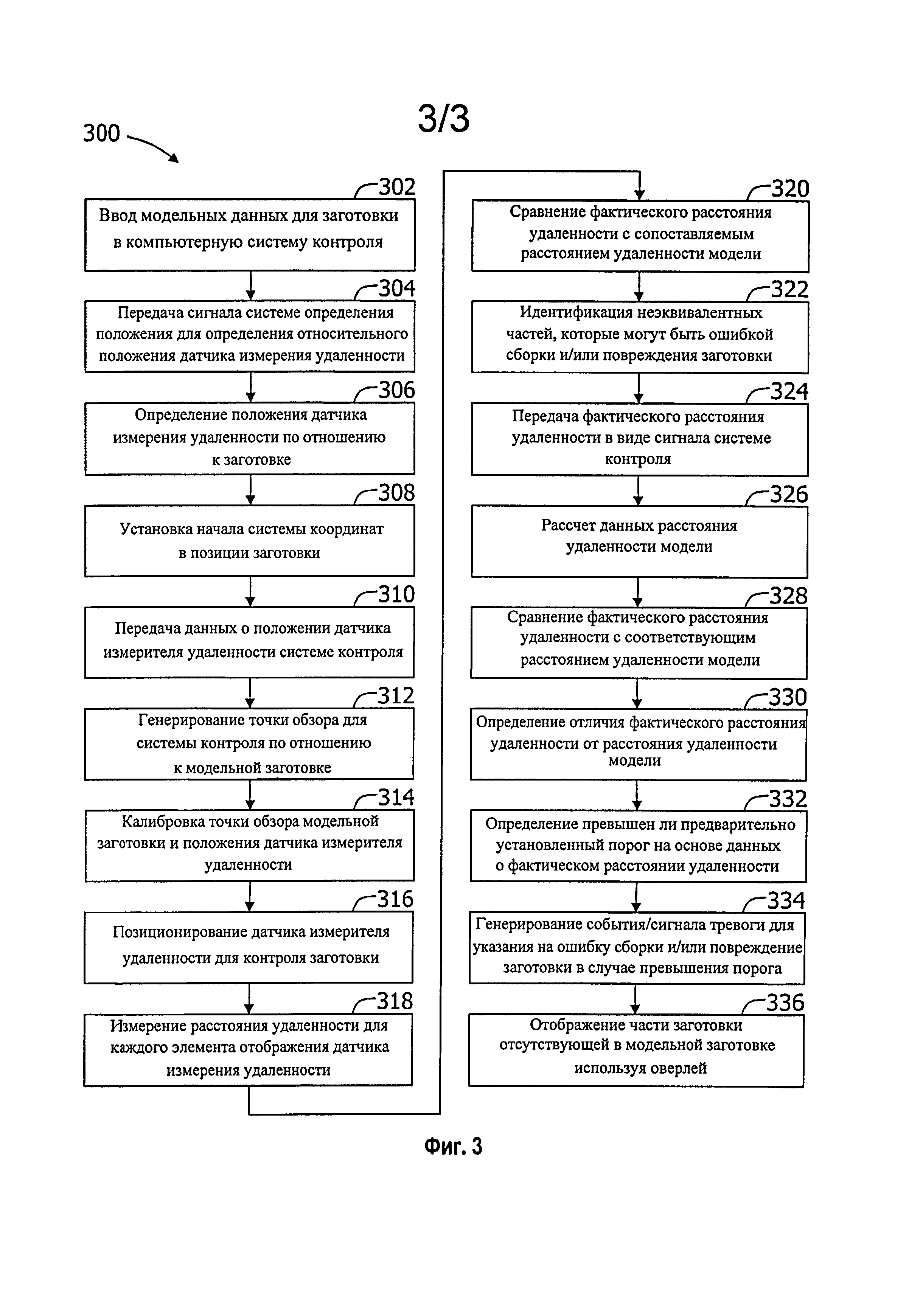
ФИГ. 3 - блок-схема варианта реализации способа, который может быть реализован системой контроля, показанной на ФИГ. 1.
Осуществление изобретения
Настоящее изобретение относится, в целом, к контролю заготовок и, более конкретно, к способам и системам, позволяющим осуществлять автоматизированный контроль заготовок. В одном из вариантов осуществления система контроля содержит измеритель удаленности, который измеряет данные о фактическом расстоянии удаленности по меньшей мере для одного элемента отображения измерителя удаленности, систему обнаружения положения и ориентации (позиции), которая определяет данные о позиции измерителя удаленности по отношению к заготовке, и компьютерную систему контроля, которая связана с измерителем удаленности и с системой обнаружения позиции. Описанные в настоящем описании варианты осуществления способов и систем позволяют компьютерной системе (i) - вводить данные модели, связанные с заготовкой, (ii) - определять относительное положение измерителя удаленности по отношению к заготовке, (iii) - калибровать точку обзора для компьютерной системы контроля по отношению к модели на основании положения измерителя удаленности по отношению к заготовке, (iv) - измерять данные о фактическом расстоянии удаленности по крайней мере одного элемента отображения измерителя удаленности по отношению к заготовке, и (v) - определять, на основании данных о фактическом расстоянии удаленности, не превышен ли предварительно установленный порог по отношению к заготовке.
Описанные способы и системы могут быть реализованы с использованием компьютерного программирования или технологий машиностроения, включая компьютерное программное обеспечение, включая встроенное программное обеспечение, аппаратные средства или любое сочетание их самих либо их подсистем, технические результаты которых могут включать по меньшей мере одно из перечисленных ниже: а) - загрузка данных модели для заготовки в компьютерную систему контроля; b) - определение данных о позиции измерителя удаленности по отношению к контролируемой заготовке; с) - калибровка точки обзора для компьютерной системы контроля по отношению к модели и позиции измерителя удаленности по отношению к контролируемой заготовке; d) - измерение данных о фактическом расстоянии удаленности по меньшей мере для одного элемента отображения, где данные о фактическом расстоянии удаленности представляют собой фактическое расстояние удаленности между измерителем удаленности и контролируемой заготовкой; е) - расчет данных расстояния удаленности модели для точки обзора компьютерной системы контроля, где данные о расстоянии удаленности модели представляют собой расстояние удаленности модели от точки обзора компьютерной системы контроля для моделирования заготовки; f) - сравнение данных о фактическом расстоянии удаленности с данными о расстоянии удаленности модели; g) – определение, отличается ли фактическое расстояние удаленности от расстояния удаленности модели, и определение, не превышает ли это отличие предварительно установленный порог; и h) - отображение части заготовки, которая отсутствует в модельной заготовке, с использованием перекрытия, применяемого к обзору измерителя удаленности.
При использовании в настоящем описании элемент или шаг, употребляемый в единственном числе, следует понимать как не исключающее присутствие несколько элементов или шагов, если исключение такой возможности не указано явно. Более того, ссылки на «один вариант осуществления» и/или на «иллюстративный вариант» не предполагают интерпретацию как исключающие существование дополнительных вариантов осуществления, которые также включают упомянутые отличительные признаки.
ФИГ. 1 - схематическая иллюстрация варианта осуществления системы 100 контроля, которая может использоваться для контроля узла или заготовки 108. В целом, заготовка представляет собой продукт инженерной среды, в котором элементы конструкции предварительно собраны определенным образом, так что составные части предварительно расположены и сориентированы определенным образом по отношению друг к другу и к заготовке в целом. Система 100 контроля может использоваться в широком диапазоне вариантов применений. Например, система 100 контроля может использоваться для осмотра крупных сборных объектов, таких как летательные аппараты, поезда, суда или любой другой объект, состоящий из большого числа элементов. В качестве альтернативы, система 100 контроля может также использоваться для контроля малогабаритных узлов, таких как инструменты или газовые/жидкостные трубы и им подобные.
Как показано на ФИГ. 1, система 100 контроля содержит измеритель 102 удаленности, систему 104 обнаружения позиции и компьютерную систему 106 контроля. При использовании в настоящем описании термин «позиция» определяется как положение и ориентация одного объекта по отношению к другому. Система 100 контроля используется для контроля заготовки, например заготовки 108, как более подробно описано ниже, и измеритель 102 удаленности сообщается с компьютерной системой 106 контроля. В частности, измеритель 102 удаленности передает сигнал 110, указывающий на расстояние D между измерителем удаленности 102 и заготовкой 108 для каждого элемента отображения в поле обзора измерителя 102 удаленности. Система обнаружения 104 положения сообщается с компьютерной системой 106 контроля и передает сигнал 112, указывающий на позицию измерителя 102 удаленности по отношению к заготовке 108. В качестве альтернативы или дополнения, измеритель 102 удаленности и система 104 обнаружения позиции могут содержать передатчик, трансивер и/или любое другое устройство передачи сигналов, которое позволяет системе 100 контроля функционировать, как описано в настоящем документе.
Измеритель 102 удаленности может представлять собой любой подходящий измеритель удаленности или камеру, способные измерять фактическое расстояние между измерителем 102 удаленности и заготовкой 108. В некоторых вариантах осуществления измеритель 102 удаленности представляет собой лазерный или трехмерный световой измеритель удаленности. В одном из вариантов осуществления измеритель 102 удаленности определяет фактические данные о расстоянии путем расчета полного времени пробега лазерного луча, испускаемого в сторону заготовки 108 и отраженного от заготовки 108. В другом варианте осуществления измеритель 102 удаленности проецирует инфракрасную картину на заготовку 108. Измеритель 102 удаленности содержит инфракрасную камеру (не показана), которая захватывает изображение инфракрасной картины. Затем данные об удаленности определяются сравнением ожидаемой инфракрасной картины с фактической инфракрасной картиной, наблюдаемой измерителем 102 удаленности. В качестве альтернативы, для расчета расстояния измеритель 102 удаленности может определить разность фаз лазерного луча, измеритель 102 удаленности определяет расстояние на основании времени пробега или разности фаз с использованием трехмерных составляющих (например, точки по осям X, Y, Z) в облаке точек, где сгруппировано множество точек.
В иллюстративном варианте осуществления измеритель удаленности 102 сообщается с компьютерной системой 106 контроля через проводное или беспроводное соединение и передает данные о фактическом расстоянии удаленности в компьютерную систему 106 контроля. В иллюстративном варианте осуществления измеритель 102 удаленности содержит процессор обработки изображений, который позволяет получить видеоизображение любого объекта в пределах его поля обзора в режиме реального или квазиреального времени. В альтернативном варианте осуществления измеритель 102 удаленности может захватывать и сохранять изображения любого объекта в пределах его поля обзора. В процессе использования в варианте осуществления пользователь устанавливает вручную измеритель 102 удаленности в желаемое положение по отношению к заготовке 108. Поскольку измеритель 102 удаленности вырабатывает видеоизображение, пользователь может перемещать измеритель 102 удаленности по отношению к заготовке 108, не приводя к ошибке или неточности контроля. В альтернативных вариантах осуществления измеритель 102 удаленности может устанавливаться в требуемое положение с использованием автоматических управляющих устройств, или измеритель 102 удаленности может оставаться неподвижным во время движения заготовки 108 по отношению к измерителю удаленности 102.
В иллюстративном варианте осуществления система 104 обнаружения позиции определяет позицию измерителя удаленности 102 по отношению к заготовке 108. Более конкретно, в иллюстративном варианте осуществления система 104 обнаружения позиции содержит процессор, который позволяет системе 104 обнаружения позиции обнаруживать позицию измерителя 102 удаленности в режиме реального или квазиреального времени. Система 104 обнаружения позиции сообщается с компьютерной системой 106 контроля посредством проводной системы или беспроводного соединения.
Система 104 обнаружения позиции может определять позицию измерителя 102 удаленности при помощи различных способов. В иллюстративном варианте осуществления система 104 обнаружения позиции представляет собой систему захвата изображений, которая содержит множество камер 116, расположенных около заготовки 108. Множество мелких отражающих маркеров 118 присоединяется к каждому из отслеживаемых объектов (например, к измерителю 102 удаленности и к заготовке 108). Такие маркеры 118 облегчают калибровку позиции измерителя 102 удаленности по отношению к заготовке 108. Камеры 116 испускают около заготовки 108 излучение в ближнем инфракрасном диапазоне, которое отражается обратно от маркеров 118. В иллюстративном варианте осуществления заготовка 108 остается неподвижной в процессе контроля и калибруется в начале координат (0, 0, 0) по отношению к системе координат, поскольку заготовка 108 остается неподвижной в процессе контроля. Когда множество камер 116 наблюдают отражающий маркер 118, система 104 обнаружения позиции может определить, например, преимущественно триангулированное положение указанного маркера 118 в трехмерном пространстве. Более того, когда несколько маркеров 118 присоединяются к одному и тому же объекту, система 104 обнаружения позиции может также определить относительную ориентацию указанного объекта. Другие системы и способы определения позиции измерителя 102 удаленности могут включать, без ограничения, отслеживание на основании маркеров, двумерное (2D) плоскостно-натуральное определение контура, трехмерное (3D) отслеживание на основании модели, трехмерную тренировку датчика удаленности, трехмерное отслеживание с использованием итеративного алгоритма ближайших точек, механические отслеживающие устройства, которые физически присоединяют измеритель 102 удаленности к точке отсчета (например, маркер на заготовке 108), устройства отслеживания магнитного поля, которые определяют напряженность поля и расположение импульсного магнитного поля, не-внутренние отслеживающие устройства без источников, в которых используются пассивные магнитные датчики, привязанные к магнитному полю земли, оптические устройства отслеживания, устройства акустического отслеживания и/или любые другие устройства отслеживания, сочетание устройств или способ, который позволяет определять позицию.
ФИГ. 2 - схематическая иллюстрация варианта выполнения компьютерной системы 106 контроля (показана на ФИГ. 1), которая может использоваться с системой 100 контроля (показана на ФИГ. 1). В иллюстративном варианте осуществления компьютерная система 106 контроля содержит запоминающее устройство 200 и процессор 202, соединенный с запоминающим устройством 200 для использования при выполнении команд. Более конкретно, в иллюстративном варианте осуществления компьютерная система 106 контроля выполнена с возможностью выполнения одной или нескольких операций, описанных в настоящем документе, путем программирования запоминающего устройства 200 и/или процессора 202. Например, процессор 202 может быть запрограммирован путем кодирования операции как одной или нескольких исполняемых команд и представления исполняемых команд в запоминающее устройство 200.
Процессор 202 может содержать один или несколько обрабатывающих блоков (например, в многоядерной конфигурации). При использовании в настоящем документе термин «процессор» не ограничивается интегральными схемами, называемыми в литературе компьютером, а относится к более широкому кругу устройств, таких как контроллер, микроконтроллер, микрокомпьютер, программируемый логический контроллер (ПЛК), интегральная схема, предназначенная для конкретного применения, и другие программируемые схемы. В иллюстративном варианте осуществления процессор 202 выполнен с возможностью загрузки данных эталонной (модельной) заготовки 120 (показана ФИГ. 1) для заготовки 108 (показана на ФИГ. 1), приема данных о позиции из системы 104 обнаружения позиции (показана на ФИГ. 1), калибровки точки обзора для компьютерной системы 106 контроля по отношению к модели и позиции измерителя 102 удаленности (показан на ФИГ. 1) по отношению к заготовке 108, получения данных о фактическом расстоянии удаленности от измерителя 102 удаленности, расчета данных о расстоянии удаленности модельной заготовки 120 для точки обзора компьютерной системы 106 контроля, где данные о расстоянии удаленности модели представляют расстояние удаленности модели от точки обзора компьютерной системы 106 контроля для моделирования заготовки 120 и сравнения данных о фактическом расстоянии удаленности с данными о расстоянии удаленности модели.
В иллюстративном варианте осуществления запоминающее устройство 200 содержит одно или несколько устройств (не показаны), которые позволяют избирательно сохранять и извлекать такую информацию, как исполняемые команды и/или другие данные. В иллюстративном варианте осуществления такие данные могут включать, без ограничения, данные о позиции, данные о положении, данные о направлении, ранее отсканированную модельную заготовку 120, данные модели системы компьютерного проектирования (CAD), глобальную систему позиционирования, картографические данные, данные светокопии, данные поэтажного плана, эксплуатационные данные, пороговые данные контроля и/или алгоритмы управления. В качестве альтернативы компьютерная система контроля 106 может быть сконфигурирована для использования любого алгоритма и/или способа, который позволяет способам и системам функционировать, как описано в настоящем документе. Запоминающее устройство 200 может также содержать одну или несколько машинно-читаемых сред, таких как, без ограничения, динамическое ОЗУ, статическое ОЗУ, твердотельный накопитель и/или жесткий диск. В иллюстративном варианте осуществления, запоминающее устройство 200 хранит данные, относящиеся к процессу контроля, например данные ранее отсканированной модельной заготовки 120, данные модели CAD заготовки 108 и/или пороговые данные контроля. Облака точек, обнаруженные измерителем 102 удаленности, могут также сохраняться в запоминающем устройстве 200 и использоваться в качестве документации состояния постройки или подтвержденного контроля заготовки 108.
В иллюстративном варианте осуществления компьютерная система контроля 106 содержит интерфейс 204 отображения, который присоединен к процессору 202 для отображения информации пользователю. Например, интерфейс 204 отображения может содержать адаптер дисплея (не показан), который может присоединяться к устройству отображения (не показано), которое может содержать, без ограничения, электроннолучевую трубку, жидкокристаллический дисплей, светодиодный дисплей, дисплей на органических светодиодах, дисплей на «электронных чернилах» и/или принтер. В некоторых вариантах осуществления интерфейс 204 отображения содержит одно или несколько устройств отображения. В иллюстративном варианте осуществления процессор 202 конфигурируется для сравнения расстояния D (показанного на ФИГ. 1), измеренного измерителем 102 удаленности, с расстоянием D2 (показанным на ФИГ. 1), рассчитанным для модельной заготовки 120 компьютерной системой 106 контроля. При наличии отличия процессор 202 сравнивает отличие с предварительно установленными пороговыми данными, хранящимися в запоминающем устройстве 200. В иллюстративном варианте осуществления, когда отличие расстояний D и D2 превышает предварительно установленный порог, процессор 202 демонстрирует пользователю часть заготовки 108, которая отсутствует в модельной заготовке 120, с использованием интерфейса 204 отображения. Перекрытие может отображаться с использованием различных способов. В одном из вариантов осуществления отображается только та часть заготовки 108, которая превышает предварительно установленный порог. В другом варианте осуществления отображаются все заготовки 108, а несоответствующие требованиям части заготовки 108 отображаются иным цветом, чем остальная часть заготовки 108. В качестве альтернативы может использоваться любой другой способ отображения, который позволяет отображать избранные участки заготовки, которые определены как имеющие части в пределах предварительно установленных допусков.
Компьютерная система 106 контроля в иллюстративном варианте осуществления содержит входной интерфейс 206 для приема входных сигналов от пользователя. Например, в иллюстративном варианте осуществления входной интерфейс 206 принимает информацию, подходящую для использования с любым из способов, описанных в настоящем документе. Входной интерфейс 206 присоединен к процессору 202 и может содержать, например, джойстик, клавиатуру, указывающее устройство, мышь, стилус, сенсорную панель (например, сенсорная площадка или сенсорный экран) и/или датчик положения. Следует отметить, что один и тот же компонент, например, сенсорный экран, может функционировать и как интерфейс 204 отображения, и как входной интерфейс 206.
В иллюстративном варианте осуществления компьютерная система контроля 106 содержит интерфейс 208 связи, который присоединен к процессору 202. В иллюстративном варианте осуществления интерфейс 208 связи связан по меньшей мере с одним удаленным устройством, таким как измеритель 102 удаленности и/или система 104 обнаружения позиции. Например, в интерфейсе 208 связи может использоваться, без ограничения, проводной либо беспроводной сетевой адаптер и/или адаптер мобильной связи. Сеть (не показана), используемая для присоединения компьютерной системы 106 контроля к удаленному устройству, может содержать, без ограничения, Интернет, локальную вычислительную сеть, распределенную сеть, беспроводную сеть, сотовую сеть и/или виртуальную частную сеть или другие подходящие средства связи.
ФИГ. 3 - блок-схема иллюстративного варианта осуществления способа 300, который может быть реализован для контроля заготовки, такой как заготовка 108 (показана на ФИГ. 1), с использованием системы контроля, такой как система контроля 100 (показана на ФИГ. 1). В процессе работы, в иллюстративном варианте осуществления система 100 контроля управляется пользователем с использованием компьютерной системы 106 контроля (показана на ФИГ. 1). Входной интерфейс 206 (показан на ФИГ. 2) позволяет пользователю вводить 302 данные модельной заготовки 120, связанные с заготовкой 108, в компьютерную систему контроля 106. В одном из вариантов осуществления данные модели представляют собой данные модели системы трехмерного компьютерного проектирования, которые хранятся в запоминающем устройстве 200 (показано на ФИГ. 2).
После ввода 302 данных модели компьютерная система контроля 106 передает 304 сигнал 112 (показан на ФИГ. 1), требующий от системы 104 обнаружения позиции (показана на ФИГ. 1), чтобы она определила 306 позицию измерителя удаленности 102 (показан на ФИГ. 1) по отношению к заготовке 108.
Для определения 306 позиции измерителя 102 удаленности в иллюстративном варианте осуществления пользователь задает 308 начало трехмерной координатной системы в положении заготовки 108. Система 104 обнаружения позиции определяет 306 позицию измерителя 102 удаленности по отношению к заготовке 108 с использованием множества камер, определяющих положения, таких как камеры 116 (показаны на ФИГ. 1). Система 104 обнаружения позиции передает 310 данные о позиции обратно в компьютерную систему 106 контроля, как сигнал 112.
Используя данные о позиции измерителя 102 удаленности и данные модели для заготовки 108, хранящиеся в запоминающем устройстве 200, компьютерная система 106 контроля генерирует 312 точку обзора для компьютерной системы 106 контроля по отношению к модельной заготовке. Компьютерная система 106 контроля калибрует 314 точку обзора модельной заготовки 120 и позицию измерителя 102 удаленности, обеспечивая возможность отображения точки обзора модельной заготовки 120 компьютерной системой 106 контроля таким образом, чтобы она оставалась в состоянии синхронизации с положением измерителя 102 удаленности по отношению к заготовке 108 по мере того, как положение измерителя 102 удаленности по отношению к заготовке 108 изменяется.
Пользователь располагает 316 измеритель 102 удаленности для контроля желаемой части заготовки 108. В иллюстративном варианте осуществления измеритель 102 удаленности устанавливается в требуемое положение 316 вручную пользователем. В альтернативных вариантах осуществления измеритель 102 удаленности может устанавливаться в требуемое положение 316 автоматической позиционирующей системой или может оставаться неподвижным в то время, как заготовка 108 перемещается для контроля.
После калибровки 314 и позиционирования 316 измеритель 102 удаленности измеряет 318 данные о расстоянии удаленности для определения фактического расстояния между измерителем 102 удаленности и заготовкой 108 для каждого элемента отображения измерителя 102 удаленности. В одном из вариантов осуществления пользователь может непрерывно перемещать или вращать измеритель 102 удаленности вокруг заготовки 108 для захвата всего многообразия фактических расстояний удаленности и для обеспечения возможности сравнения 320 с множеством расстояний удаленности связанной модели для идентификации 322 неэквивалентных частей, которые могут представлять ошибку сборки и/или повреждение заготовки 108. Измеритель 102 удаленности передает 324 данные о фактическом расстоянии удаленности как сигнал 110 (показан на ФИГ. 1) в компьютерную систему 106 контроля.
Затем компьютерная система 106 контроля рассчитывает 326 данные о расстоянии удаленности модельной заготовки 120, представляющие дистанцию удаленности модели между точкой обзора, выработанной 312 компьютерной системой 106 контроля, и модельной заготовкой 120. Компьютерная система 106 контроля сравнивает 328 данные о фактическом расстоянии удаленности с данными о расстоянии удаленности модели для определения 330, отличается ли фактическое расстояние удаленности от расстояния удаленности модели. Если фактическое расстояние удаленности отличается от расстояния удаленности модели, компьютерная система 106 контроля определяет 332, превышает ли отличие предварительно установленные пороги. Соответствие пороговым значениям является указанием на то, что заготовка 108 находится в приемлемом состоянии. В случае превышения порогового значения компьютерная система 106 генерирует 334 сигнал или событие для указания на потенциальную ошибку сборки, присутствие постороннего объекта и/или повреждения заготовки 108. Более того, компьютерная система 106 контроля отображает 336 часть заготовки 108, которая отсутствует в модельной заготовке 120 с использованием перекрытия, применяемого к обзору измерителя 102 удаленности.
Варианты осуществления, описанные в настоящем документе, относятся, в целом, к контролю заготовки и, более конкретно, к способам и системам для автоматического контроля заготовки. Варианты осуществления, описанные в настоящем документе, координируют точные и надежные системы и способы для контроля заготовки. Более конкретно, варианты осуществления, описанные в настоящем документе, предусматривают автоматизированный способ, который помогают снизить фактор человеческой ошибки при контроле заготовки. А измеритель удаленности измеряет расстояние для каждого элемента отображения в его поле обзора и передает данные о расстоянии в компьютерную систему контроля. А система обнаружения позиции отслеживает положение и ориентацию измерителя удаленности по отношению к заготовке и передает положение в компьютерную систему контроля. Используя модель заготовки, хранящуюся в компьютерной системе контроля, данная система создает модельный вид модельной заготовки, в которой модельный вид отслеживает фактический вид, с точки обзора измерителя удаленности в режиме реального или квазиреального времени. Затем компьютерная система контроля сравнивает фактическое расстояние, наблюдаемое измерителем удаленности, с модельным расстоянием, рассчитанным в компьютерной системе контроля, и подает сигнал тревоги, если отличие расстояний превышает предварительно установленный порог. Компьютерная система контроля может также создавать изображение для иллюстрации пользователю, которая из частей заготовки приводит к подаче сигнала тревоги. Фактор человеческой ошибки существенно снижается за счет вариантов осуществления, описанные в настоящем документе. Более того, система контроля позволяет измерять как крупные, так и мелкие заготовки, а также заготовку с ограниченной физической доступностью. Варианты осуществления, описанные в настоящем документе, также помогают уменьшить время контроля в случае дорогостоящих операций ручного контроля.
Варианты осуществления иллюстративных вариантов осуществления способов и систем для контроля заготовки описаны выше в деталях. Способы и системы не ограничиваются конкретными вариантами осуществления, описанными в настоящем документе, а скорее, компоненты систем и/или шаги способа могут использоваться независимо и отдельно от других компонентов и/или шагов, описанных в настоящем документе. Каждый шаг способа и каждый компонент могут также использоваться в сочетании с другими шагами способа и/или компонентами. Также, некоторые признаки различных вариантов осуществления могут быть показаны на некоторых чертежах и не показаны на других, они приводятся только для удобства. Любой признак, содержащийся на чертеже, может быть упомянут и/или заявлен в сочетании с любым признаком, содержащимся на любом другом чертеже.
В описании используются примеры для раскрытия вариантов осуществления, включая наилучший режим, а также для того, чтобы позволить любому человеку, являющемуся специалистом в данной области, реализовать на практике данные варианты осуществления, включая изготовление и использование любых устройств или систем и реализацию любых включенных способов. Патентоспособный объем изобретения определяется пунктами формулы изобретения и может содержать другие примеры, с которыми встречаются специалисты в данной области. Иные подобные примеры, как предполагается, охвачены пунктами формулы изобретения, если они имеют структурные элементы, которые не отличаются от точного языка пунктов формулы изобретения, или если они содержат эквивалентные элементы конструкции с незначительными отличиями от точного языка пунктов формулы изобретения.
Активатор для управления потоком плазмы и способ управления потоком плазмы
Устройство и способ управления потоком плазмы на задней кромке аэродинамического профиля
Система управления потоком с использованием плазменного актуатора и способ ее использования для управления потоком, обтекающим оружейный отсек высокоскоростного подвижного носителя
Усиленные элементы жесткости и способ их изготовления
Нагнетательное насосное устройство с диэлектрическим барьером и способ формирования такого устройства
Система с датчиками
Регистрация радиолокационных импульсов посредством цифрового радиолокационного приемника
Полурычажное шасси и способ размещения балки тележки такого шасси
Инструмент в виде шаблона и способ для быстрого ремонта композитной структуры
Малошумящая система предкрылка с элеметами, размещенными в передней кромке крыла и выполненными с возможностью развертывания
Активатор для управления потоком плазмы и способ управления потоком плазмы
Устройство и способ управления потоком плазмы на задней кромке аэродинамического профиля
Система управления потоком с использованием плазменного актуатора и способ ее использования для управления потоком, обтекающим оружейный отсек высокоскоростного подвижного носителя
Усиленные элементы жесткости и способ их изготовления
Нагнетательное насосное устройство с диэлектрическим барьером и способ формирования такого устройства
Система с датчиками
Регистрация радиолокационных импульсов посредством цифрового радиолокационного приемника
Полурычажное шасси и способ размещения балки тележки такого шасси
Инструмент в виде шаблона и способ для быстрого ремонта композитной структуры
Малошумящая система предкрылка с элеметами, размещенными в передней кромке крыла и выполненными с возможностью развертывания

