Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИСБАЛАНСА РОТОРОВ
Вид РИД
Изобретение
Изобретение относится к балансировочной технике и может быть использовано в горизонтальных балансировочных станках для определения веса и параметров дисбаланса роторов.
Известно устройство для измерения дисбаланса ротора, содержащее опоры, опорные мостики, привод ротора, причем опорные мостики соединены с опорами через динамометрические элементы (датчики силы) [Патент России 2028590, МПК G01M 1/04, 04.03.1991, опубл. 09.02.1995].
Недостатком этого устройства является относительно низкая чувствительность, поскольку информационные сигналы о дисбалансе снимаются в вертикальном направлении с динамометрических элементов, а жесткость устройства в этом направлении относительно велика, в данном устройстве невозможно проведение измерений в зарезонансном режиме. Кроме того, устройство не содержит элементов обеспечивающих получение сигналов о весе, амплитудах и фазах дисбаланса ротора, т.е. имеет ограниченные функциональные возможности.
Известно устройство для измерения дисбаланса ротора, содержащее опоры, опорные мостики, на которые укладывают ротор, причем опорный мостик соединен с соответствующей опорой через пару упругих пластин [Patent US 2457718, приор. 24.05.1945]. Недостатком этого устройства являются ограниченные функциональные возможности.
Известно устройство для измерения дисбаланса ротора, содержащее опоры, опорные мостики, на которые укладывают ротор, причем опорный мостик соединен с соответствующей опорой через пару упругих пластин [Патент России 2425345, приор. 04.12.2008, опубл. 10.06.2010]. Недостатком этого устройства являются ограниченные функциональные возможности, поскольку это устройство не обеспечивает измерение веса, амплитуд и фаз дисбаланса, а также не позволяет контролировать вес ротора в процессе балансировки.
Известно устройство для определения массы и положения центра масс ротора, содержащее основание, которое соединено с опорным мостиком, на котором установлен ротор, через упругие элементы и динамометрические датчики [Патент России 2525629, МПК G01M 1/10, приоритет 21.03.2014, опубл. 20.08.2014]. Данное устройство имеет ограниченные функциональные возможности, поскольку не обеспечивает определение амплитуд и фаз дисбаланса.
Известно устройство для измерения дисбаланса ротора, содержащее первую и вторую опоры, на которые через датчики силы установлен балансируемый ротор, который связан с приводом ременной передачей [ЕР 0133229 В1, МПК G01M 1/00, приор. 11.07.1984, опубл. 02.11.1988].
Наиболее близким к предлагаемому является устройство для измерения дисбаланса ротора, содержащее опоры, опорные мостики и привод ротора, причем опорный мостик каждой опоры соединен с соответствующей опорой через плоские пружины, на каждой из которых закреплен тензорезистор [Patent US 5600062, приор. 04.02.1997, МПК G01M 1/02, НКИ 73/463, фиг. 4].
Данное устройство имеет ограниченные функциональные возможности и сравнительно низкую чувствительность, поскольку сигнал с тензорезистора от дисбаланса сравнительно мал, так как жесткость плоской пружины в направлении ее плоскости относительно велика, а также пониженную помехоустойчивость.
Для обеспечения возможности контроля веса ротора, в котором из-за его значительного веса необходимо измерять сравнительно большие силы, действующие на весоизмерительные элементы, в то время как при контроле сил вибрации, связанных с дисбалансом, необходимо измерять малые по величине силы. Это может быть обеспечено, если в качестве силоизмерительного элемента использовать плоские пружины, жесткость которых имеет большое значение в направлении изменения веса (т.е. в направлении плоскости пружины), а в направлении действия вибрации, т.е. изгиба пружины, ее жесткость мала. Кроме того, для выполнения балансировки необходимо определить величины амплитуд и фаз вибрационных сигналов на каждой из опор, что позволит выполнить как статическую, так и динамическую балансировку. Для этого устройство должно содержать соответствующие измерительные элементы, а также датчик фазовой метки. Для повышения чувствительности и помехоустойчивости измерения следует выполнять по дифференциальной схеме.
Реализация таких особенностей функционирования достигается тем, что в устройстве для измерения дисбаланса ротора, содержащем опоры, опорные мостики и привод ротора, причем опорный мостик каждой опоры соединен с соответствующей опорой через две плоские пружины, на каждой из которых закреплен тензорезистор, на каждой плоской пружине симметрично тензорезистору относительно ее плоскости установлен дополнительный тензорезистор, все тензорезисторы ориентированы с вертикальной осью чувствительности, выходы каждого из тензорезисторов соединены с входом соответствующего согласующего усилителя, выходы которых соединены с входами блока вычисления веса, амплитуд и фаз дисбалансов, дополнительный вход которого соединен с выходом датчика фазовой метки, а привод связан с балансируемым ротором ременной передачей.
Другое отличие состоит в том, что в устройстве для измерения дисбаланса ротора блок вычисления веса, амплитуд и фаз дисбалансов содержит первый, второй и третий операционные усилители, генератор, восемь аналоговых умножителей, четыре фильтра нижних частот, первый и второй сумматоры, первый и второй аналоговые делители, первый и второй элементы вычисления корня квадратного, а также первый и второй элементы вычисления функции арктангенса, входы блока вычисления веса, амплитуд и фаз дисбалансов соединены через соответствующие суммирующие резисторы с прямым входом первого операционного усилителя, выход которого является выходом сигнала веса ротора блока вычисления веса, амплитуд и фаз дисбалансов, который соединен через первый резистор обратной связи с инверсным выходом первого операционного усилителя, который соединен его выходом и общей шиной через соответственно конденсатор обратной связи и первый дополнительный резистор, а прямой вход первого операционного усилителя соединен через второй дополнительный резистор с подвижным контактом первого подстроечного резистора, неподвижные выводы которого соединены с шинами опорных напряжений, первый и четвертый входы блока вычисления веса, амплитуд и фаз дисбалансов соединены через соответственно первый разделительный конденсатор и третий дополнительный резистор, которые соединены последовательно, и второй разделительный конденсатор и четвертый дополнительный резисторы, которые также соединены последовательно, с прямым входом второго операционного усилителя, выход которого является выходом первого сигнала вибрации, который соединен через второй резистор обратной связи с инверсным входом второго операционного усилителя, который через пятый дополнительный резистор и третий разделительный конденсатор, которые соединены последовательно, а также через шестой дополнительный резистор и четвертый разделительный конденсатор, которые соединены последовательно, подключен соответственно к второму и третьему входам блока вычисления веса, амплитуд и фаз дисбалансов, а прямой вход второго операционного усилителя через седьмой дополнительный резистор соединен с подвижным контактом второго подстроечного резистора, неподвижные контакты которого соединены с шинами опорных напряжений, пятый и восьмой входы блока вычисления веса, амплитуд и фаз дисбалансов соединены через соответственно пятый разделительный конденсатор и восьмой дополнительный резистор, которые соединены последовательно, и через шестой разделительный конденсатор и девятый дополнительный резисторы, которые соединены последовательно, с прямым входом третьего операционного усилителя, выход которого является выходом второго вибрационного сигнала, который соединен через третий резистор обратной связи с инверсным входом третьего операционного усилителя, который через десятый дополнительный резистор и седьмой разделительный конденсатор, которые соединены последовательно, а также через одиннадцатый дополнительный резистор и восьмой разделительный конденсатор, которые соединены последовательно, подключен соответственно к шестому и седьмому входам блока вычисления веса, амплитуд и фаз дисбалансов, а прямой вход третьего операционного усилителя соединен через двенадцатый дополнительный резистор с подвижным контактом третьего подстроечного резистора, неподвижные контакты которого соединены с шинами опорных напряжений, выход второго операционного усилителя соединен с первыми входами первого и второго аналоговых умножителей, вторые входы которых соединены с выходами синусного и косинусного сигналов генератора, а выходы первого и второго аналоговых умножителей соединены с входами соответственно первого и второго фильтра нижних частот, выход первого фильтра нижних частот соединен с входом делителя первого аналогового делителя и с входами третьего аналогового умножителя, выход второго фильтра нижних частот соединен с входами четвертого аналогового умножителя и с входом делимого первого аналогового делителя, выход которого соединен с входом первого элемента вычисления функции арктангенса, выход которого является выходом сигнала фазы на первой опоре блока вычисления веса, амплитуд и фаз дисбалансов, выход третьего операционного усилителя соединен с первыми входами пятого и шестого аналоговых умножителей, вторые входы которых соединены с выходами соответственно синусного и косинусного сигналов генератора, выход пятого аналогового умножителя соединен с входом третьего фильтра нижних частот, выход которого соединен с входами седьмого аналогового умножителя и входом делителя второго аналогового делителя, выход которого соединен с входом второго элемента вычисления функции арктангенса, выход которого является выходом сигнала фазы вибрации на второй опоре, выход шестого аналогового умножителя соединен с выходом четвертого фильтра нижних частот, выход которого соединен с входами восьмого аналогового умножителя и с входом делимого второго аналогового делителя, выходы третьего и четвертого аналоговых умножителей соединены с входами первого сумматора, выход которого соединен с входом первого элемента вычисления корня квадратного, выход которого является выходом сигнала амплитуды вибрации на первой опоре, а выходы седьмого и восьмого аналоговых умножителей соединены с входами второго сумматора, выход которого соединен с входом второго элемента вычисления корня квадратного, выход которого является выходом сигнала амплитуды вибрации на второй опоре блока вычисления веса, амплитуд и фаз дисбалансов, дополнительный вход которого соединен с входом синхронизации генератора.
Другое отличие состоит в том, что в устройстве для измерения дисбаланса ротора блок вычисления веса, амплитуд и фаз дисбалансов содержит узел аналого-цифрового преобразования, входы которого являются входами блока вычисления веса, амплитуд и фаз дисбалансов, выход узла аналого-цифрового преобразования соединен с входом вычислительного узла, выходы которого являются выходами сигналов веса, амплитуды вибрации на первой и второй опорах, а также фаз вибрации на первой и второй опорах, а вход таймера вычислительного узла является дополнительным входом блока вычисления веса, амплитуд и фаз дисбалансов.
Другое отличие состоит в том, что в устройстве для измерения дисбаланса ротора вычислительный узел выполнен в виде микроконтроллера.
Другое отличие состоит в том, что в устройстве для измерения дисбаланса ротора вычислительный узел выполнен в виде процессора обработки сигналов.
Другое отличие состоит в том, что в устройстве для измерения дисбаланса ротора вычислительный узел выполнен в виде компьютера.
Другое отличие состоит в том, что в устройстве для измерения дисбаланса ротора согласующий усилитель содержит инструментальный усилитель, выход которого является выходом согласующего усилителя, входы которого соединены соответственно с первым входом инструментального усилителя и первой шиной питания, первый вход инструментального усилителя соединен через первый резистор с второй шиной питания, которая через второй резистор соединена с первым неподвижным контактом балансирующего резистора, подвижный контакт и второй неподвижный контакты которого соединены соответственно с вторым входом инструментального усилителя и через третий резистор с первой шиной питания, а регулирующий переменный резистор включен между входами задания коэффициента усиления инструментального усилителя.
Сущность предлагаемого решения поясняется следующими чертежами.
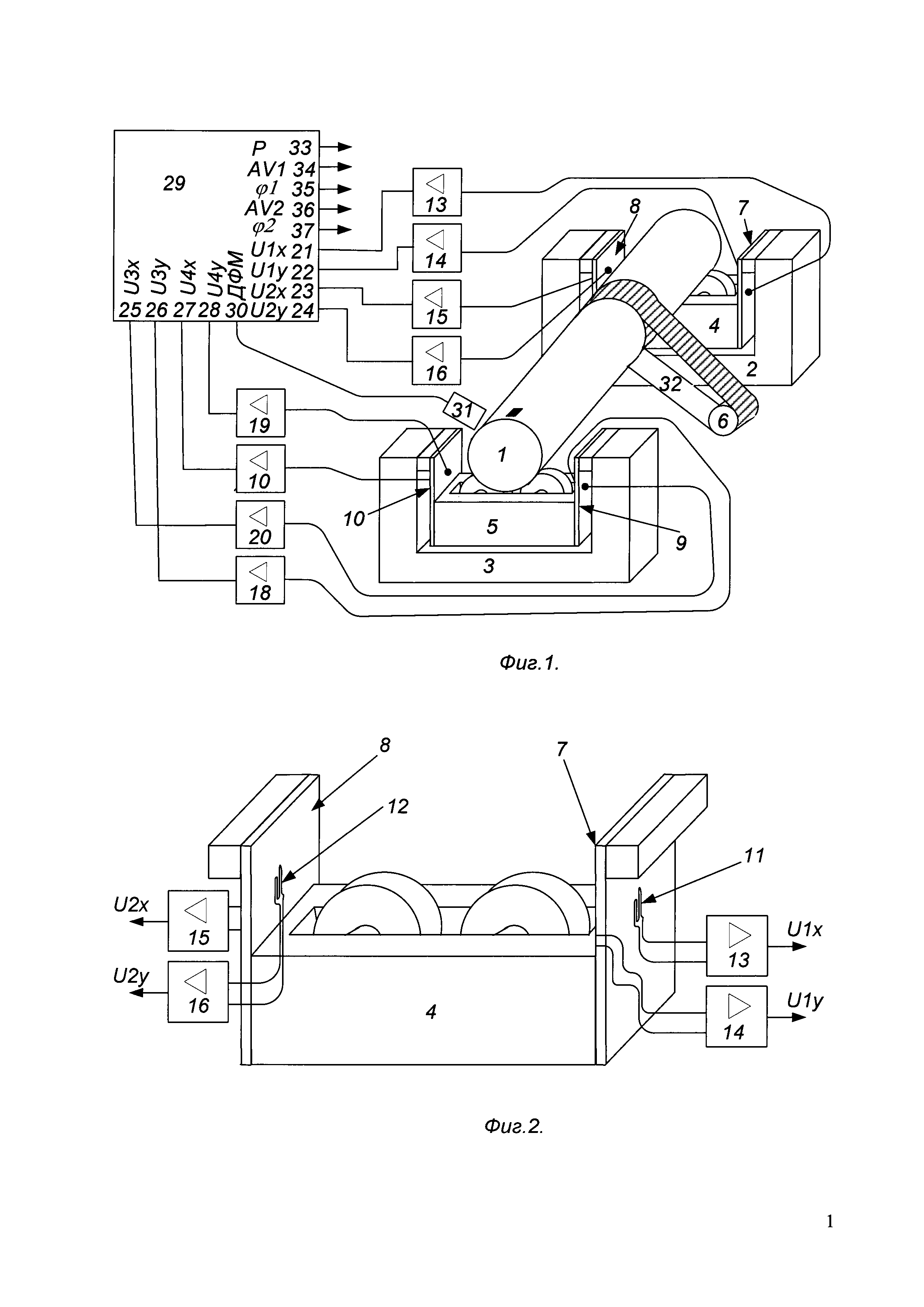
На фиг. 1 представлена структура устройства.
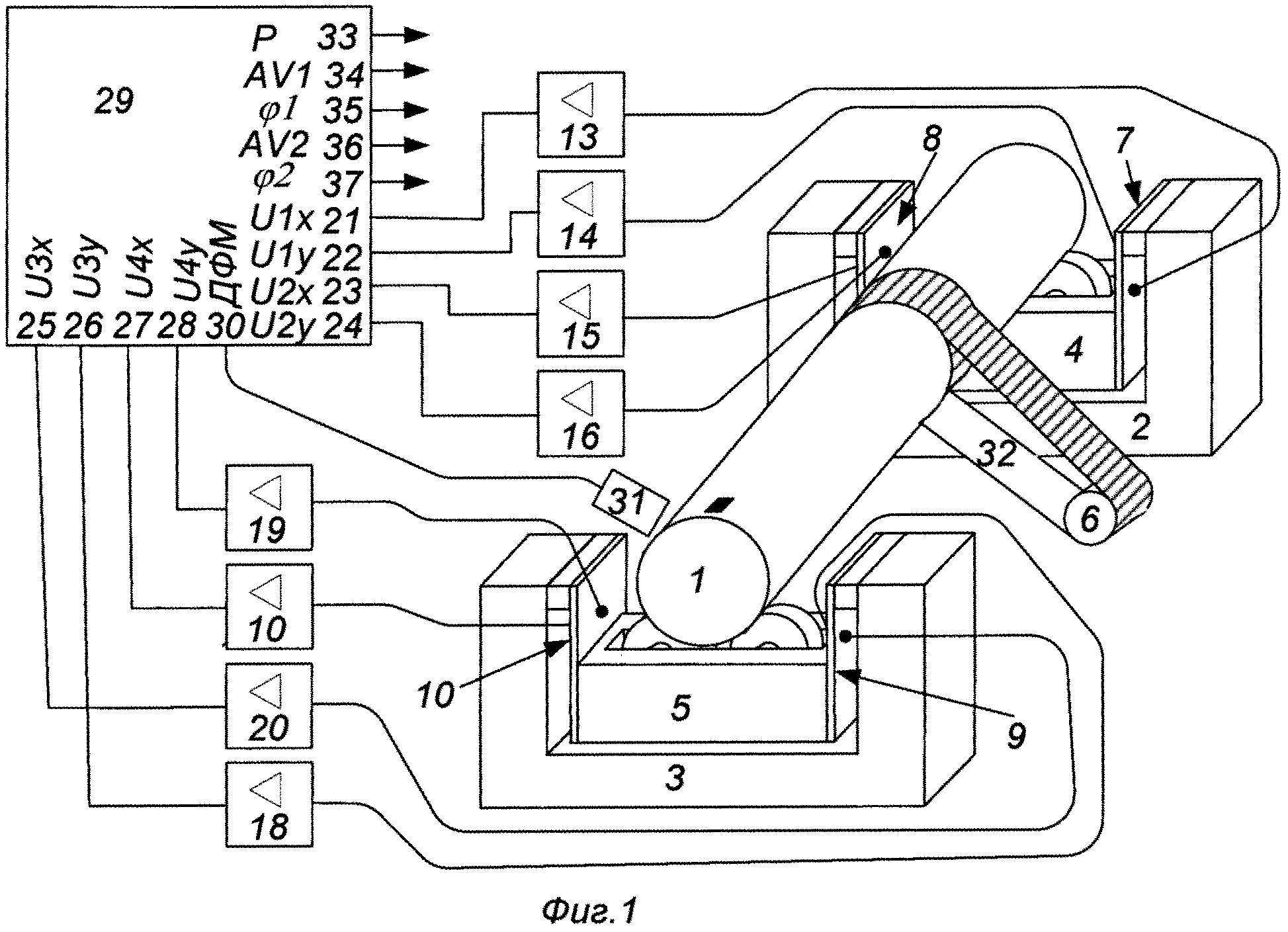
На фиг. 2 показан опорный мостик, закрепленный на плоских пружинах, на которых установлены тензорезисторы.
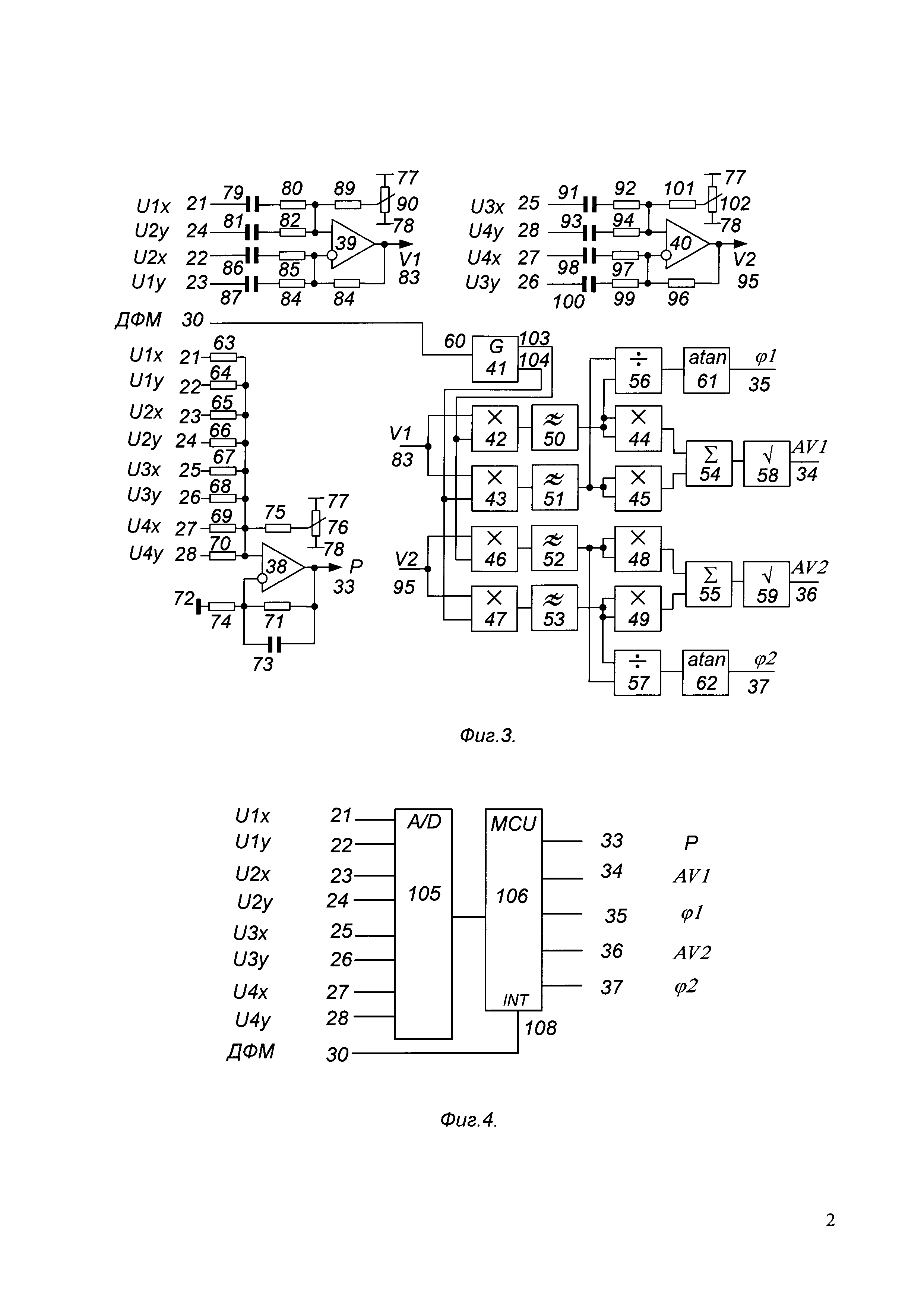
На фиг. 3 показан пример структурной схемы блока вычисления веса, амплитуд и фаз дисбалансов, реализованный с использованием аналоговой схемотехники.
На фиг. 4 показан пример структурной схемы блока вычисления веса, амплитуд и фаз дисбалансов, реализованный с использованием цифрового вычислительного узла.
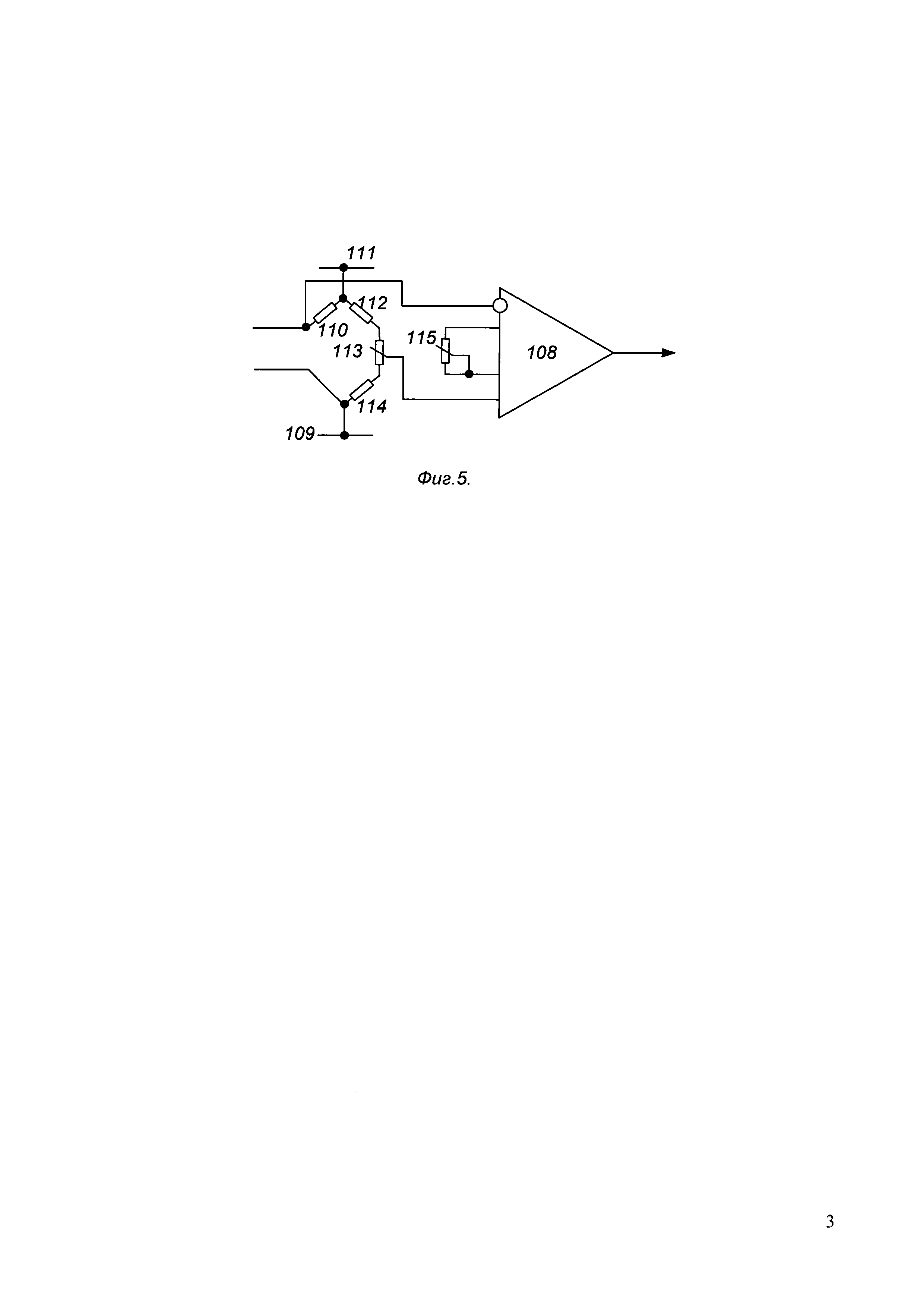
На фиг. 5. показан пример структурной схемы согласующего усилителя.
Устройство для измерения дисбаланса ротора 1 содержит опоры 2 и 3, опорные мостики 4 и 5, привод 6 ротора, причем опорный мостик 4 или 5 каждой опоры 2 или 3 соответственно соединен с соответствующей опорой через две плоские пружины 7 и 8 (для первой опоры) и 9 и 10 (для второй опоры 3), на каждой из которых закреплен тензорезистор 11, на каждой плоской пружине симметрично тензорезистору 11 относительно ее плоскости установлен дополнительный тензорезистор 12, все тензорезисторы 11 и 12 ориентированы по вертикальной оси чувствительности, выводы каждого из тензорезисторов 11 и 12 соединены с входом соответствующего согласующего усилителя 13-20, выходы которых соединены с входами 21-28 блока 29 вычисления веса, амплитуд и фаз дисбалансов, дополнительный вход 30 которого соединен с выходом датчика 31 фазовой метки, а привод 6 связан с балансируемым ротором 1 ременной передачей 32.
На выходах 33-37 блока 29 вычисления веса, амплитуд и фаз дисбалансов формируются соответствующие сигналы результатов измерения.
Как показано на фиг. 3, блок 29 вычисления веса, амплитуд и фаз дисбалансов содержит первый 38, второй 39 и третий 40 операционные усилители, генератор 41, восемь аналоговых умножителей 42-49, четыре фильтра нижних частот 50-53, первый 54 и второй 55 сумматоры, первый 56 и второй 57 аналоговые делители, первый 58 и второй 59 элементы вычисления корня квадратного, генератор 41 имеет вход 60 синхронизации, а также первый 61 и второй 62 элементы вычисления функции арктангенса, входы 21-28 блока 29 вычисления веса, амплитуд и фаз дисбалансов соединены через соответствующие суммирующие резисторы 63-70 с прямым входом первого 38 операционного усилителя, выход которого является выходом 33 сигнала веса ротора блока 29 вычисления веса, амплитуд и фаз дисбалансов, который соединен через первый резистор 71 обратной связи с инверсным выходом первого 38 операционного усилителя, который соединен его выходом 33 и общей шиной 72 через соответственно конденсатор 73 обратной связи и первый дополнительный резистор 74, а прямой вход первого 38 операционного усилителя соединен через второй дополнительный резистор 75 с подвижным контактом первого подстроечного резистора 76, неподвижные выводы которого соединены с шинами 77 и 78 опорных напряжений, первый 21 и четвертый 24 входы блока 29 вычисления веса, амплитуд и фаз дисбалансов соединены через соответственно первый разделительный конденсатор 79 и третий дополнительный резистор 80, которые соединены последовательно, и второй разделительный конденсатор 81 и четвертый дополнительный резисторы 82, которые также соединены последовательно, с прямым входом второго 39 операционного усилителя, выход которого является выходом 83 первого сигнала вибрации, который соединен через второй резистор 84 обратной связи с инверсным входом второго 39 операционного усилителя, который через пятый дополнительный резистор 85 и третий разделительный конденсатор 86, которые соединены последовательно, а также через шестой дополнительный резистор 87 и четвертый разделительный конденсатор 88, которые соединены последовательно, подключен соответственно к второму 22 и третьему 23 входам блока 29 вычисления веса, амплитуд и фаз дисбалансов, а прямой вход второго 39 операционного усилителя через седьмой дополнительный резистор 89 соединен с подвижным контактом второго подстроечного резистора 90, неподвижные контакты которого соединены с шинами 77 и 78 опорных напряжений, пятый 25 и восьмой 28 входы блока 29 вычисления веса, амплитуд и фаз дисбалансов соединены через соответственно пятый разделительный конденсатор 91 и восьмой дополнительный резистор 92, которые соединены последовательно, и через шестой разделительный конденсатор 93 и девятый дополнительный резисторы 94, которые соединены последовательно, с прямым входом третьего 40 операционного усилителя, выход 95 которого является выходом второго вибрационного сигнала, который соединен через третий резистор 96 обратной связи с инверсным входом третьего 40 операционного усилителя, который через десятый дополнительный резистор 97 и седьмой разделительный конденсатор 98, которые соединены последовательно, а также через одиннадцатый дополнительный резистор 99 и восьмой разделительный конденсатор 100, которые соединены последовательно, подключен соответственно к шестому 26 и седьмому 27 входам блока 29 вычисления веса, амплитуд и фаз дисбалансов, а прямой вход третьего 40 операционного усилителя соединен через двенадцатый дополнительный резистор 101 с подвижным контактом третьего подстроечного резистора 102, неподвижные контакты которого соединены с шинами 77 и 78 опорных напряжений, выход 83 второго 39 операционного усилителя соединен с первыми входами первого 42 и второго 43 аналоговых умножителей, вторые входы которых соединены с выходами 103 и 104 соответственно синусного и косинусного сигналов генератора 41, а выходы первого 42 и второго 43 аналоговых умножителей соединены с входами соответственно первого 50 и второго 51 фильтров нижних частот, выход первого 50 фильтра нижних частот соединен с входом делителя первого 56 аналогового делителя и с входами третьего 44 аналогового умножителя, выход второго 51 фильтра нижних частот соединен с входами четвертого 45 аналогового умножителя и с входом делимого первого 56 аналогового делителя, выход которого соединен с входом первого 61 элемента вычисления функции арктангенса, выход которого является выходом 35 сигнала фазы на первой опоре 2 блока 29 вычисления веса, амплитуд и фаз дисбалансов, выход 95 третьего 40 операционного усилителя соединен с первыми входами пятого 46 и шестого 47 аналоговых умножителей, вторые входы которых соединены с выходами 103 и 104 соответственно синусного и косинусного сигналов генератора 41, выход пятого 46 аналогового умножителя соединен с входом третьего 52 фильтра нижних частот, выход которого соединен с входами седьмого 48 аналогового умножителя и входом делителя второго 57 аналогового делителя, выход которого соединен с входом второго 62 элемента вычисления функции арктангенса, выход которого является выходом 37 сигнала фазы вибрации на второй опоре 3, выход шестого 47 аналогового умножителя соединен с выходом четвертого 53 фильтра нижних частот, выход которого соединен с входами восьмого 49 аналогового умножителя и с входом делимого второго 57 аналогового делителя, выходы третьего 44 и четвертого 45 аналоговых умножителей соединены с входами первого 54 сумматора, выход которого соединен с входом первого 58 элемента вычисления корня квадратного, выход которого является выходом 34 сигнала амплитуды вибрации на первой 2 опоре, а выходы седьмого 48 и восьмого 49 аналоговых умножителей соединены с входами второго 55 сумматора, выход которого соединен с входом второго 59 элемента вычисления корня квадратного, выход которого является выходом 36 сигнала амплитуды вибрации на второй 3 опоре блока 29 вычисления веса, амплитуд и фаз дисбалансов, дополнительный вход 30 которого соединен с входом 60 синхронизации генератора 41.
Блок 29 вычисления веса, амплитуд и фаз дисбалансов, показанный на фиг. 4, содержит узел 105 аналого-цифрового преобразования, входы которого являются входами 21-28 блока 29 вычисления веса, амплитуд и фаз дисбалансов, выход узла 105 аналого-цифрового преобразования соединен с входом вычислительного узла 106, выходы которого являются выходами сигналов веса 33, амплитуды вибрации на первой 34 и второй 36 опорах соответственно 2 и 3, а также фаз вибрации на первой 35 и второй 37 опорах 2 и 3 соответственно, а вход 107 таймера вычислительного узла 106 является дополнительным входом 30 блока 29 вычисления веса, амплитуд и фаз дисбалансов.
Вычислительный узел 106 может быть выполнен в виде микроконтроллера, процессора обработки сигналов или компьютера.
Согласующий усилитель (13-20), как показано на фиг. 5, содержит инструментальный усилитель 108, выход которого является выходом согласующего усилителя, входы которого соединены соответственно с первым входом инструментального усилителя 108 и первой шиной 109 питания, первый вход инструментального усилителя 108 соединен через первый резистор 110 с второй шиной 111 питания, которая через второй резистор 112 соединена с первым неподвижным контактом балансирующего резистора 113, подвижный контакт и второй неподвижный контакты которого соединены соответственно с вторым входом инструментального усилителя 108 и через третий резистор 114 с первой шиной 109 питания, а регулирующий переменный резистор 115 включен между входами задания коэффициента усиления инструментального усилителя 108.
Устройство работает следующим образом.
Плоские пружины 7-10 под действием собственного веса и веса опорных мостиков 4 и 5 испытывают продольную деформацию в вертикальном направлении. Эта деформация вызывает деформацию тензорезисторов 11 и дополнительных тензорезисторов 12. Эта деформация вызывает изменение сопротивления этих тензорезисторов, которое преобразуется согласующими усилителями 13-20 в соответствующие напряжения. При отсутствии ротора 1, уложенного на опорные мостики 4 и 5 балансировкой согласующих усилителей, напряжение на их выходах может быть установлено равным нулю. Обозначим напряжения, формируемые согласующими усилителями 13 и 15, которые соединены с тензорезисторами 11, установленными на внешней стороне плоских пружин этой опоры как U1x и U2x, а напряжения на выходах согласующих усилителей 14 и 16, входы которых соединены с дополнительными тензорезисторами 12, которые установлены на внутренней стороны плоских пружин первой опоры 2, как U1y и U2y. Соответственно для второй опоры 3 согласующие усилители 17-20 формируют напряжения U3x, U3y, U4y и U4x.
После установки ротора 1 его вес вызывает появление дополнительных сил растяжения плоских пружин, которое приведет к изменению указанных напряжений. Поскольку сила веса распределена между всеми плоскими пружинами, суммарное напряжение, вызванное воздействием силы веса, может быть оценено по величине суммы напряжений на выходах согласующих усилителей 13-20, так как эти изменения направлены одинаково:
P=KP⋅(U1x+U1y+U2x+U2y+U3x+U3y+U4x+U4y),
здесь P – сигнал, характеризующий вес ротора;
KP - коэффициент пропорциональности.
Для повышения точности возможно подавление быстрых изменений сигналов, которые могут быть вызваны воздействием деформаций от вибраций и/или помехами или шумами за счет придания интегрирующих свойств при формировании этого сигнала в случае аналоговой реализации (фиг. 3) или за счет усреднения при оценке веса цифровыми вычислительными методами вычислительным узлом 106 (фиг. 4):
здесь UP0 - величина собственного веса, фиксируемая цифровым вычислительным узлом 106 до установки ротора 1, если начальная балансировка согласующих усилителей 13-20 не была выполнена.
При аналоговой реализации вычислений, как показано на фиг. 3, интегрирующие свойства обеспечиваются использованием конденсатора 73.
Установленный на опорные мостики 4 и 5 ротор 1 приводится во вращение с помощью привода 6 через ременную передачу 32.
При наличии дисбаланса ротор 1 испытывает колебания, которые через опорные мостики 4 и 5 передаются на плоские пружины 7-10. В зависимости от скорости вращения система, состоящая из ротора и предложенного устройства, может характеризоваться вибрацией с различными амплитудами и фазами колебаний на каждой из опор. При раскручивании ротора до достаточно высокой скорости вращения ротор может вращаться в зарезонансном режиме, что можно использовать для балансировки ротора со всеми преимуществами, присущими такому режиму. Это обеспечивается сравнительно малой жесткостью плоских пружин в направлении изгибных деформаций в направлении, перпендикулярном их плоскости.
Следует учитывать, что деформации, вызванные горизонтальной вибрацией, вызывают изменения величины тензорезисторов и дополнительных тензорезисторов, а также соответствующие изменения сигналов на выходах согласующих усилителей, к которым они подключены, в противоположном направлении. Если формировать сигнал, характеризующий соответствующую вибрацию, как разностный, можно обеспечить повышенную помехоустойчивость к помехам, наводимым на пары тензорезисторов и дополнительных тензорезисторов.
Кроме этого, изгиб плоских пружин по разные стороны ротора на одной опоре также происходит в противофазе, что также учитывается при формировании сигнала, характеризующего вибрацию. Наконец, поскольку такой сигнал V1, который характеризует вибрацию, должен учитывать только переменную составляющую, при аналоговой реализации может быть выделена переменная составляющая использованием разделительного конденсатора на каждом входе или вычитанием постоянного смещения, соответствующего среднему значению вибрационного сигнала при цифровой реализации. Для сигналов вибрации для первой и второй опор соответствующие выражения имеют вид:

где j – индекс, характеризующий момент времени процесса вибрации;
Δ - показывает, что соответствующие изменения вызваны вибрацией ротора.
При аналоговой реализации сигнал V1 формируется на выходе 83 на выходе операционного усилителя 39, а сигнал, соответствующий вибрации V2, на выходе 95 операционного усилителя 40.
Для оценки амплитуды и фазы сигналов вибрации V1 на оборотной частоте можно использовать определение оценок действительного В1 и мнимого А1 коэффициентов Фурье, умножением сигнала V1 на опорные синусный и косинусный сигналы с помощью аналоговых умножителей 42 и 43 при аналоговой реализации с последующей фильтрацией фильтрами нижних частот 50 и 51 соответственно.
При дискретной реализации с использованием вычислительного узла соответствующие соотношения:

где Δtj - шаг квантования по времени.
Для сигнала вибрации V2, соответствующего второй опоре 3, соответствующие соотношения имеют вид:
Результирующие оценки амплитуды АV1 и фазы ϕ1 для вибрации V1 формируются как корень квадратный из суммы квадратов оценок коэффициентов Фурье и как арктангенс их отношения первыми элементами вычисления корня квадратного 58 и вычисления функции арктангенса 61 из суммы, который формируется сумматором 54, для сигналов соответственно квадратов коэффициентов Фурье, формируемых аналоговыми умножителями 44 и 45, и их отношения, формируемого аналоговым делителем 56. При цифровой реализации вычисление выполняется в соответствии с соотношениями:
Для вибрации V2, соответствующей второй опоре, измерение выполняется аналогичным образом в соответствии с соотношениями:

При цифровой реализации, показанной на фиг. 4, могут использоваться и другие алгоритмы определения амплитуды и фазы на соответствующей оборотной частоте, например алгоритм Герцеля.
Для привязки оценки фазы к геометрическому угловому положению ротора 1 в предлагаемом устройстве использован датчик фазовой метки 31, который обеспечивает синхронизацию по начальной фазе генератора 41, а также привязку частоты синусного и косинусного сигналов, формируемых генератором 41, к оборотной частоте. При цифровой реализации аналогичные функции в вычислительном узле 106 обеспечиваются подачей такого сигнала ДФМ от датчика фазовой метки 31 на соответствующий вход узла 106, например на вход прерывания встроенного таймера.
В предлагаемом устройстве сравнительно большой вес ротора вызывает относительно малые изменения сопротивления тензорезисторов, поскольку в направлении плоскости плоских пружин их жесткость сравнительно велика, а изменения сопротивления тензорезисторов из-за изгиба плоских пружин, связанных с колебаниями ротора из-за дисбаланса, относительно велики, что позволяет с повышенной точностью контролировать малые дисбалансы даже для тяжелых роторов, вес которых также измеряется.
Способ лечения спинальных арахноидитов и арахноидальных кист
Способ балансировки ротора и устройство для его осуществления
Балансировочный станок
Способ декомпрессии срединного нерва при карпальном туннельном синдроме
Способ балансировки ротора и устройство для его осуществления
Система передачи сигналов от датчиков с аналоговым выходом по двухпроводной линии (варианты)
Многоканальное устройство сбора данных с акселерометров
Система передачи сигналов от датчиков с аналоговым выходом по двухпроводной линии связи
Многоканальное устройство для сбора данных с акселерометров
Фотоэлектрическое устройство контроля прохождения метки
Способ лечения спинальных арахноидитов и арахноидальных кист
Способ балансировки ротора и устройство для его осуществления
Балансировочный станок
Способ декомпрессии срединного нерва при карпальном туннельном синдроме
Способ балансировки ротора и устройство для его осуществления
Система передачи сигналов от датчиков с аналоговым выходом по двухпроводной линии (варианты)
Многоканальное устройство сбора данных с акселерометров
Система передачи сигналов от датчиков с аналоговым выходом по двухпроводной линии связи
Многоканальное устройство для сбора данных с акселерометров
Фотоэлектрическое устройство контроля прохождения метки

