Результат интеллектуальной деятельности: ПОВОРОТНОЕ УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к поворотному устройству позиционирования.
Предпосылки создания изобретения
В высокотехнологичной полупроводниковой промышленности представлены установки позиционирования машин (также называемые устройствами позиционирования), которые выполняют различные функции. Наведение этих установок невозможно осуществить традиционным образом (например, путем использования шарикоподшипниковых направляющих) из-за требований по вакууму и загрязнению. Другие типы подшипников (например, газовые подшипники) также трудны в использовании в такой среде.
Установки с бесконтактными направляющими на основе магнитных сил представляются очень подходящими для этих типов применений. Как правило, эти типы установок выполнены с шестью приводами, по одному для каждой степени свободы. Однако это увеличивает сложность и стоимость системного аппаратного обеспечения.
WO 2005/026801 A2 раскрывает приспособление для манипулирования оптическим элементом в вплоть до шести степенях свободы в отношении конструкции, с помощью по меньшей мере трех приводных устройств. Каждое приводное устройство имеет по меньшей мере два силовых управляемых привода, каждый из которых производит эффективное усилие вдоль одной степени свободы, с точками связывания приводных устройств, действующих непосредственно на оптический элемент.
Сущность изобретения
Задачей настоящего изобретения является обеспечение поворотного устройства позиционирования, в котором все шесть степеней свободы приводятся в действие небольшим числом элементов аппаратного обеспечения, тем самым снижая сложность и стоимость системы.
В аспекте настоящего изобретения представлено устройство позиционирования, которое содержит:
- кольцевой магнитопровод, генерирующий магнитное поле по круговому воздушному зазору,
- по меньшей мере три якоря, каждый из которых включает в себя множество катушек, по меньшей мере частично расположенных в круговом воздушном зазоре, и каждый выполнен с возможностью генерирования силы левитации в направлении левитации, ортогональном кольцевому магнитопроводу, и движущей силы в направлении приведения в движение вдоль кольцевого магнитопровода, причем упомянутые якоря расположены в различных угловых положениях вдоль упомянутого кольцевого магнитопровода, и
- контроллер для подачи токов на упомянутые якоря для индивидуального управления генерированием силы левитации и/или движущей силы посредством упомянутых якорей для осуществления вращательного движения, движения качания и/или поступательного движения упомянутого кольцевого магнитопровода.
Предпочтительные варианты воплощения изобретения определены в зависимых пунктах формулы изобретения.
Согласно настоящему изобретению, таким образом, предложено постадийное проектирование, в котором шесть степеней свободы приводятся в действие посредством трех или более приводов с двумя степенями свободы, снижая, следовательно, сложность и стоимость системы. Используемые приводы с двумя степенями свободы предпочтительно представляют собой приводы вида, описанного в WO 2007/026270 A1, в частности, которые показаны на Фиг. 6-12 этого документа, причем данный документ включен в настоящую работу посредством ссылки.
Этот документ раскрывает магнитный двигатель без стального сердечника, применяющий магнитопровод и якорь. Якорь ориентируется в магнитном поле по линейному воздушному зазору магнитопровода для генерирования движущей силы, параллельной оси X приведения в движение и ортогональной оси Z левитации, в ответ на коммутирующий ток возбуждения, и для генерирования силы, ортогональной оси X приведения в движение, в ответ на коммутирующий ток катушки, наложенный на коммутирующий ток возбуждения и сдвинутый по фазе относительно него. Этот документ, в частности, раскрывает якорь, включающий в себя катушку, расположенную в линейном воздушном зазоре, причем первый комплект левитационных витков катушки, параллельных оси X приведения в движение и ортогональных оси Z левитации, находится внутри магнитного поля, при этом второй комплект левитационных витков катушки, параллельных оси X приведения в движение и ортогональных оси Z левитации, находится вне магнитного поля. Коммутирующий ток возбуждения прикладывают к катушке для генерирования движущей силы, параллельной оси X приведения в движение и ортогональной оси Z левитации, а коммутирующий ток левитации налагают на коммутирующий ток возбуждения и смещают по фазе относительно него для генерирования силы левитации, ортогональной оси X приведения в движение и параллельной оси Z левитации.
При размещении по меньшей мере трех (с двумя степенями свободы) якорей, например, данного типа, в различных местоположениях кольцевого магнитопровода и при индивидуальном управлении упомянутыми якорями, возможны вращательные движения кольцевого магнитопровода (как правило, неограниченным образом), а также движение качания кольцевого магнитопровода.
В варианте воплощения упомянутые якоря расположены на равных угловых расстояниях. Это способствует более легкому и более предсказуемому управлению якорями.
Предпочтительно, предложенное поворотное устройство позиционирования содержит три якоря, в частности, расположенные на угловых расстояниях практически 120°. Это обеспечивает возможность достижения шести степеней свободы движения кольцевым магнитопроводом. Эти движения включают в себя вращательное движение вокруг оси вращения, которая расположена в направлении левитации кольцевого магнитопровода, движения качания вокруг осей наклона, ортогональных друг к другу и к оси вращения, и поступательные движения по трем взаимно перпендикулярным направлениям.
В предпочтительном варианте воплощения каждая из катушек якорей содержит левитационные витки, которые расположены практически параллельно направлению возбуждения и ортогонально направлению левитации, и приводные витки, которые расположены практически параллельно направлению левитации и практически ортогонально направлению возбуждения.
В другом предпочтительном варианте воплощения каждая из катушек якорей содержит:
- первый комплект левитационных витков, которые расположены внутри магнитного поля,
- второй комплект левитационных витков, которые расположены вне магнитного поля, и
- противоположный комплект приводных витков, которые расположены практически внутри магнитного поля.
Предпочтительный способ управления осуществляют посредством контроллера, который выполнен для магнитопровода с возможностью обеспечения подачи тока возбуждения на катушку для генерирования движущей силы и для подачи на ту же самую катушку тока левитации, наложенного на ток возбуждения и сдвинутого по фазе относительно него, для генерирования силы левитации.
Дополнительно, контроллер предпочтительно выполнен с возможностью обеспечения фазового сдвига тока левитации относительно тока возбуждения таким образом, чтобы сила левитации была по меньшей мере практически развязана с силой возбуждения. Устройством позиционирования можно управлять с помощью прикладного контроллера на различных уровнях, в зависимости от того, как много функциональности реализовано в контроллере устройства позиционирования, как будет более подробно разъяснено ниже.
Дополнительно, еще контроллер выполнен с возможностью обеспечения фазового сдвига тока левитации относительно тока возбуждения на 90°. Это обеспечивает преимущество в том, что ток возбуждения не зависит от тока левитации.
В еще одном варианте воплощения поворотное устройство позиционирования дополнительно содержит компенсатор силы тяжести, предпочтительно расположенный в центре магнитопровода. Этот компенсатор силы тяжести освобождает якоря от неэффективного постоянного усилия для противодействия силы тяжести. При практической реализации упомянутый компенсатор силы тяжести содержит первый магнит, неподвижно установленный на магнитопроводе, и противоположный первому магниту второй магнит.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения станут очевидными и будут освещены со ссылкой на вариант(ы) воплощения, описанный в дальнейшем. На следующих чертежах:
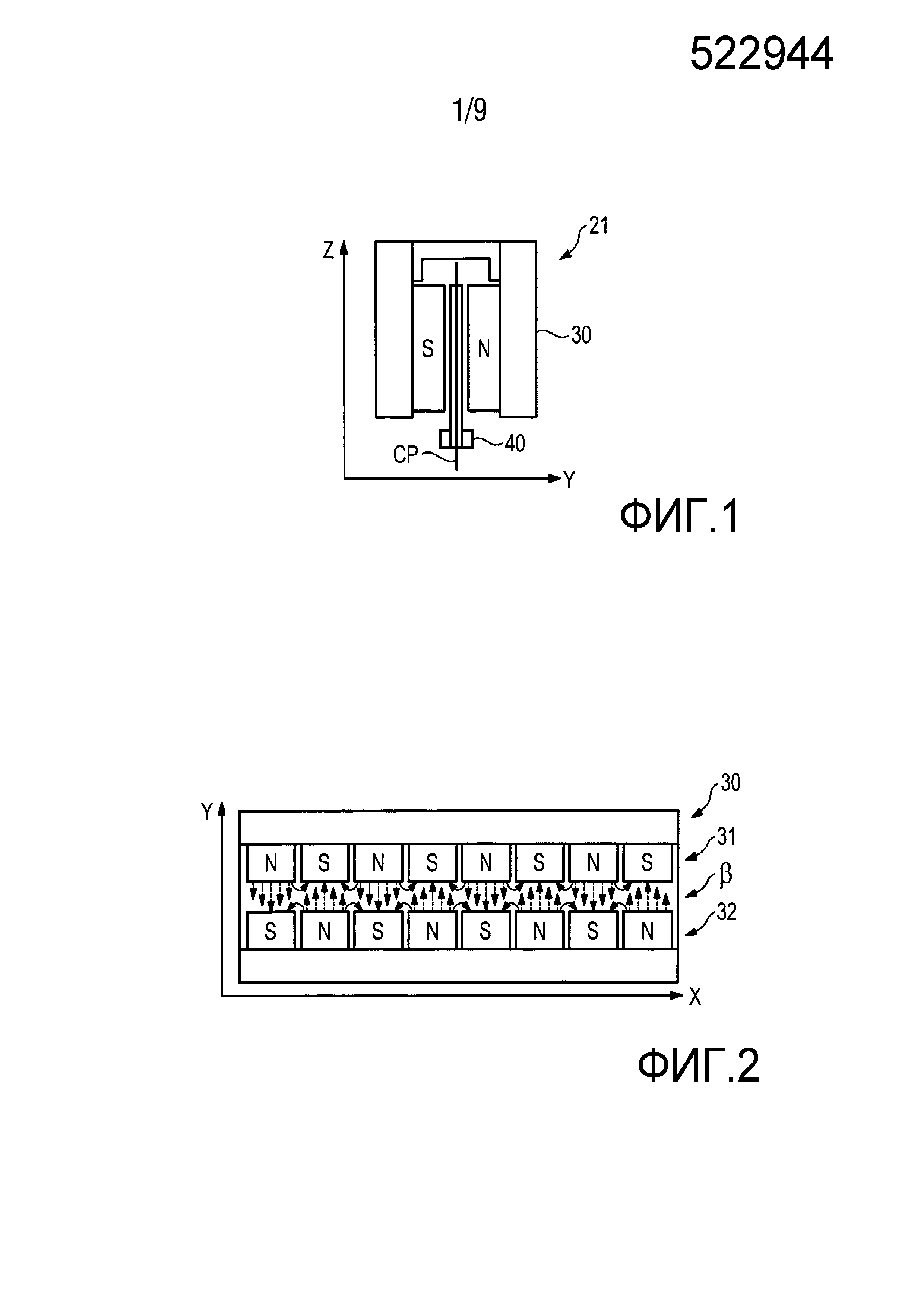
Фиг. 1 иллюстрирует изображение первого варианта воплощения магнитного линейного двигателя без стального сердечника в плоскости Y-Z.
Фиг. 2 иллюстрирует изображение линейного воздушного зазора магнитопровода по Фиг. 1 в плоскости X-Y.
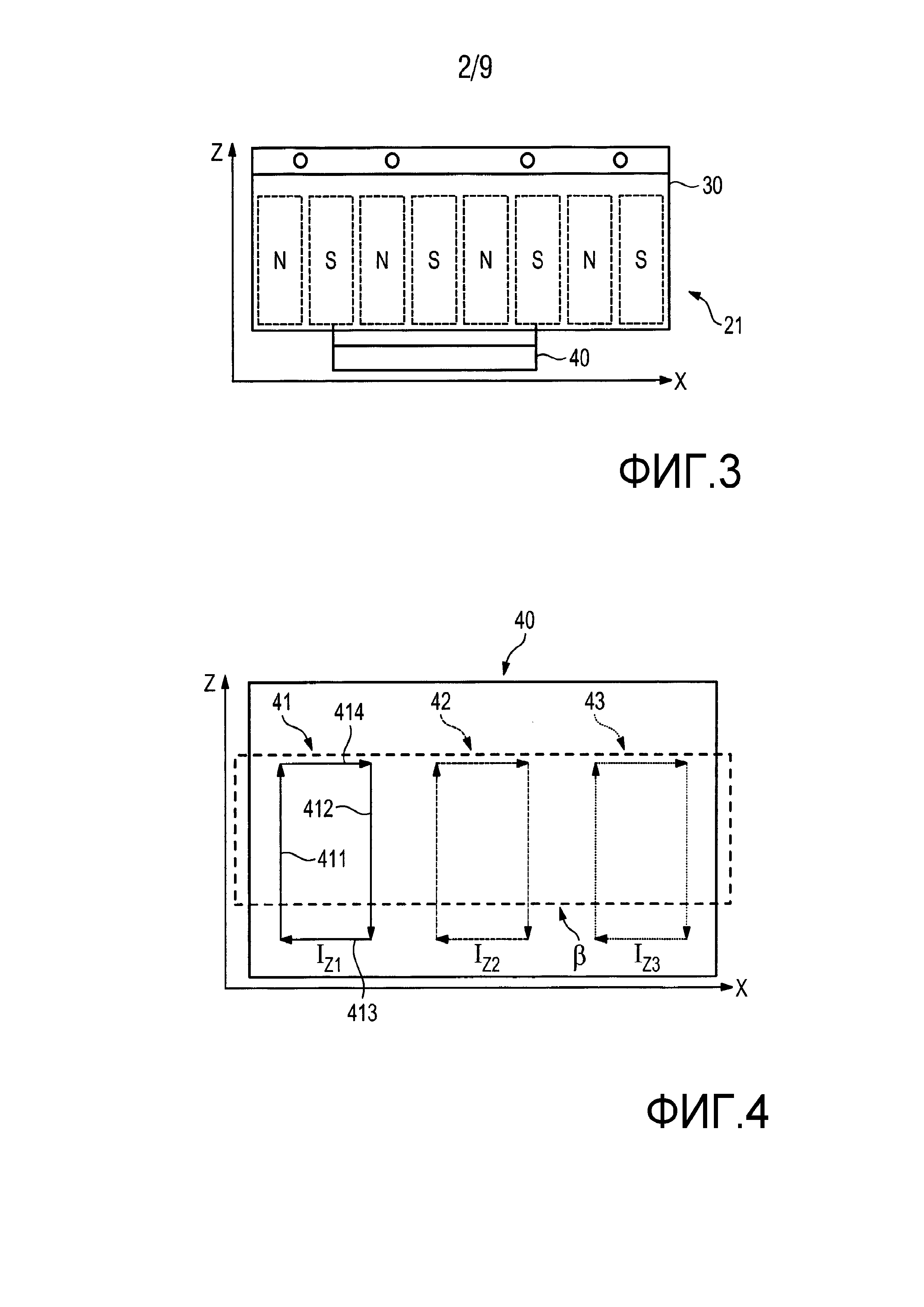
Фиг. 3 иллюстрирует изображение магнитного линейного двигателя без стального сердечника в плоскости X-Z.
Фиг. 4 иллюстрирует изображение приложения коммутируемых токов левитации к якорю, показанному на Фиг. 1, в плоскости X-Z.
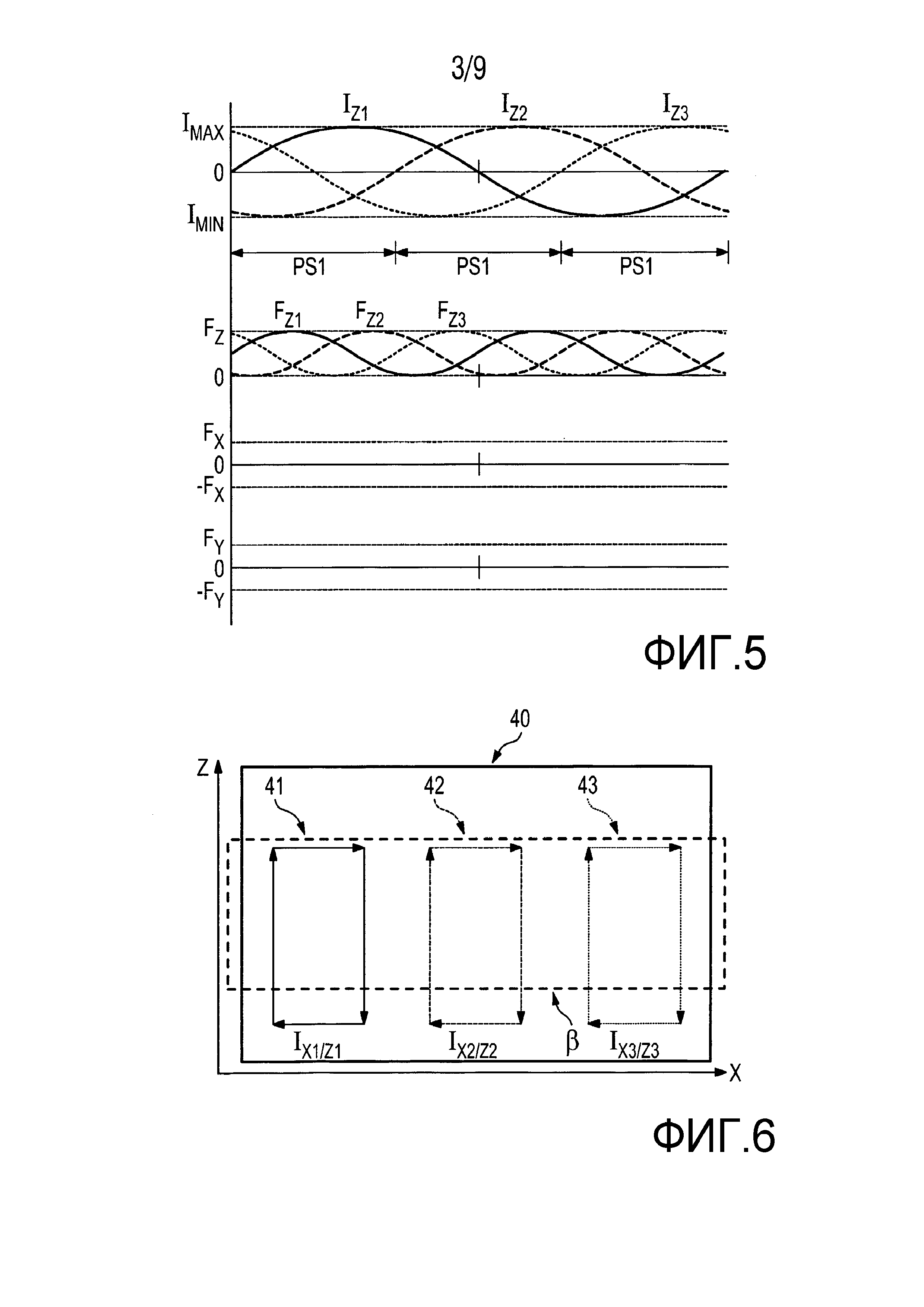
Фиг. 5 иллюстрирует примерные коммутируемые токи левитации, приложенные к якорю, показанному на Фиг. 4, и примерную силу левитации, генерируемую якорем в ответ на коммутируемые токи левитации.
Фиг. 6 иллюстрирует изображение приложения наложенных коммутируемых токов возбуждения и коммутируемых токов левитации к якорю, показанному на Фиг. 1, в плоскости X-Z.
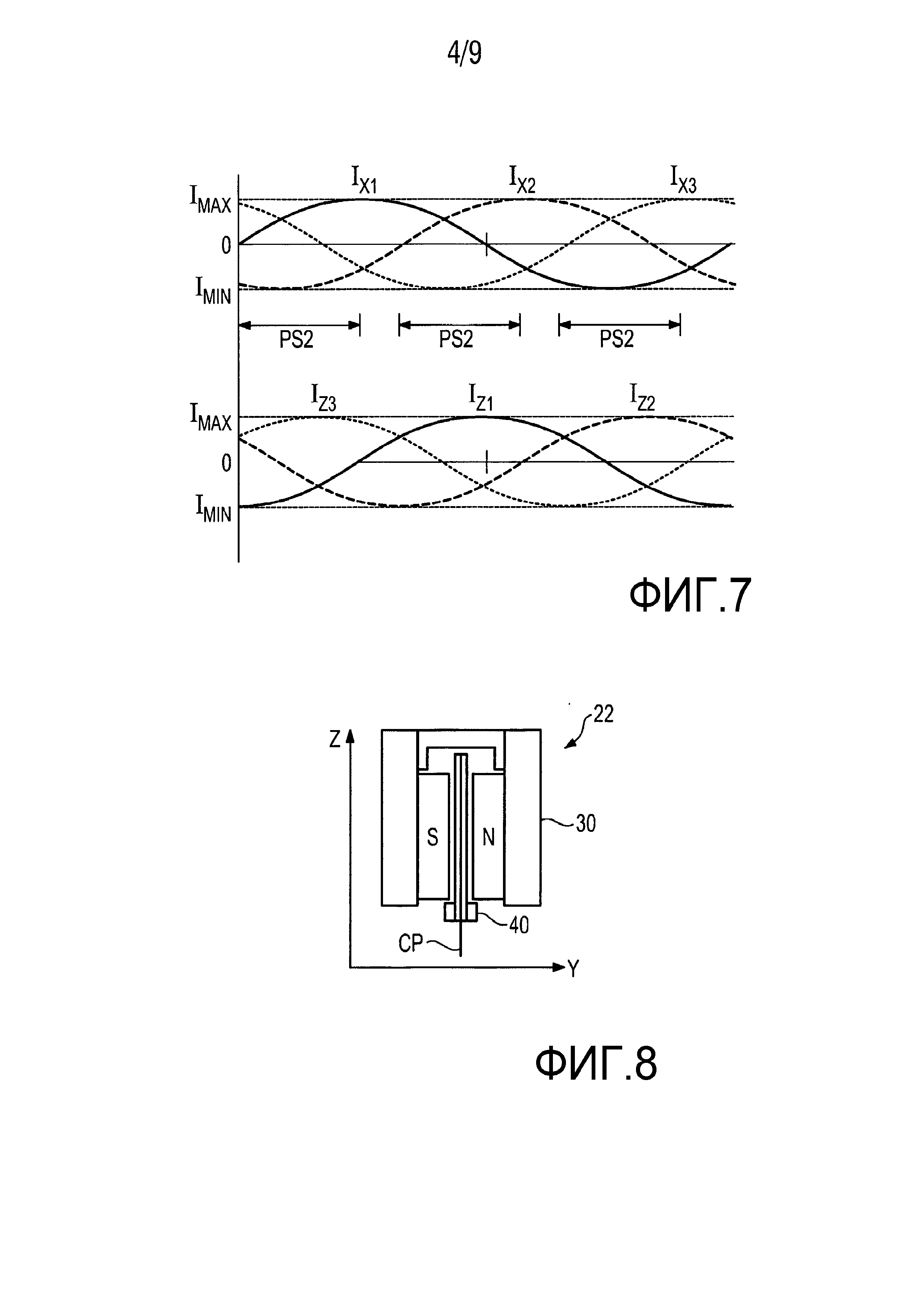
Фиг. 7 иллюстрирует примерный фазовый сдвиг коммутируемых токов возбуждения и коммутируемых токов левитации, прилагаемых к якорю, показанному на Фиг. 6.
Фиг. 8 иллюстрирует изображение второго варианта воплощения магнитного линейного двигателя без стального сердечника в плоскости Y-Z.
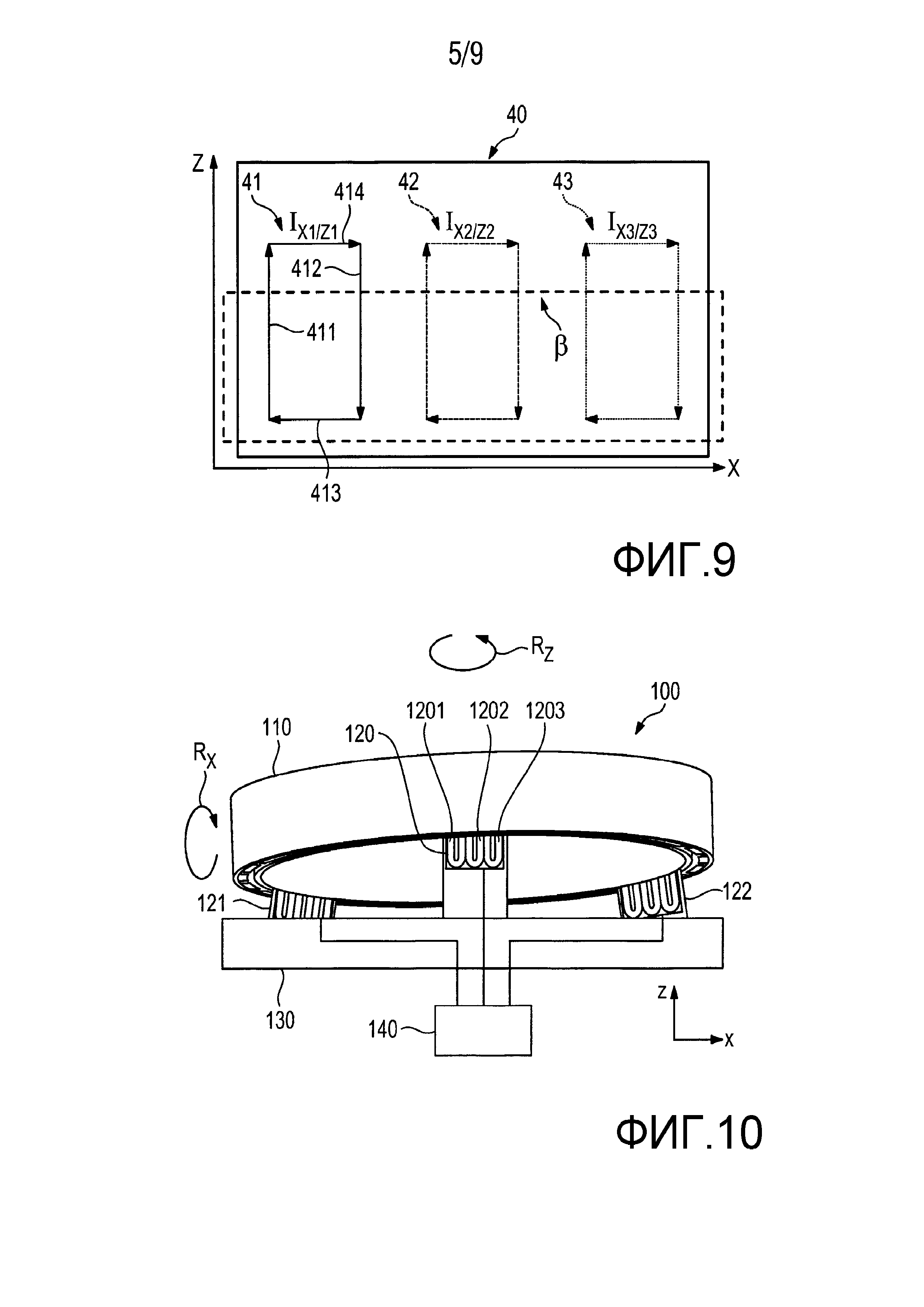
Фиг. 9 иллюстрирует изображение приложения наложенных коммутируемых токов возбуждения и коммутируемых токов левитации к якорю, показанному на Фиг. 8, в плоскости X-Z.
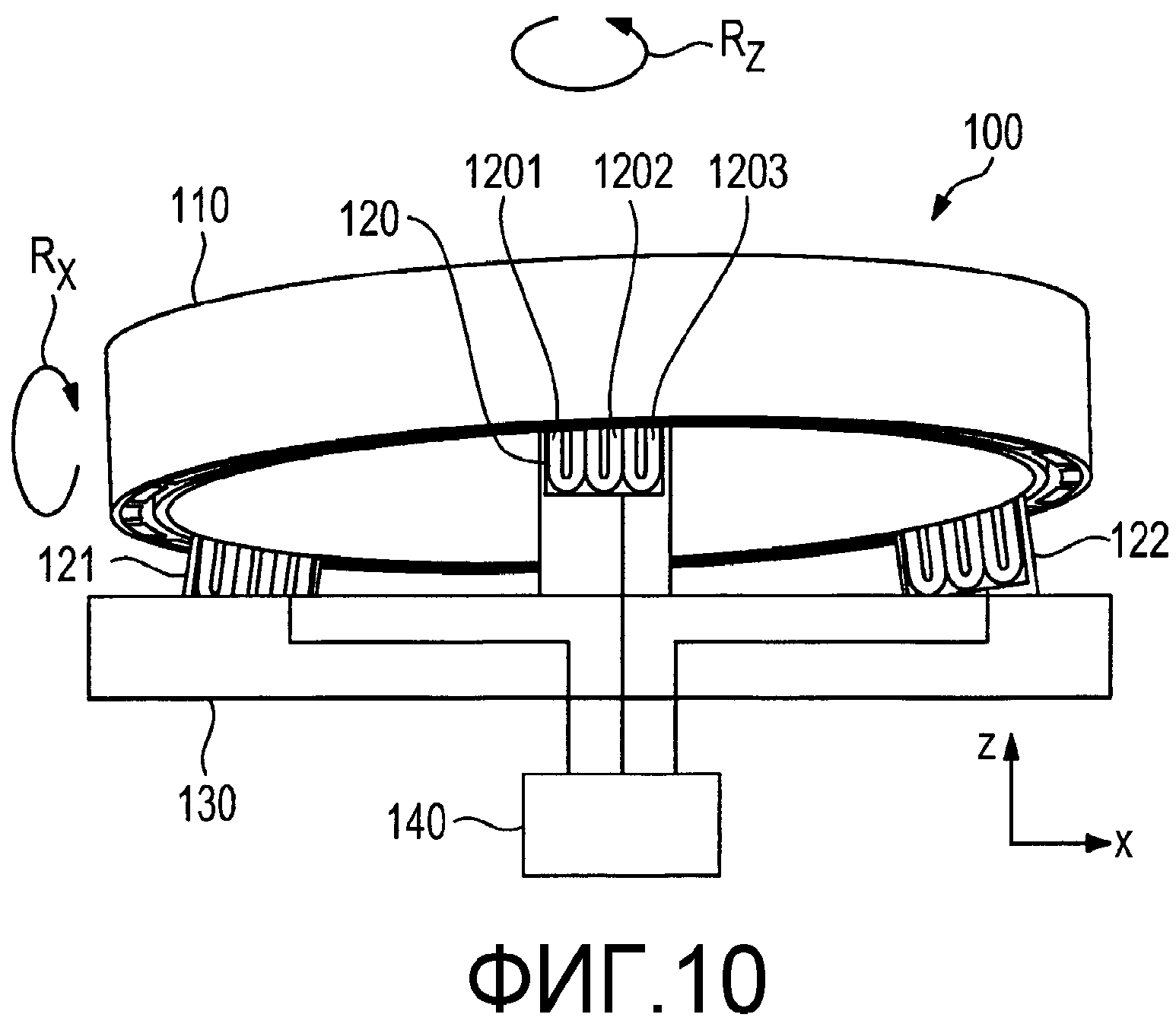
Фиг. 10 иллюстрирует перспективное изображение первого варианта воплощения поворотного устройства позиционирования согласно настоящему изобретению.
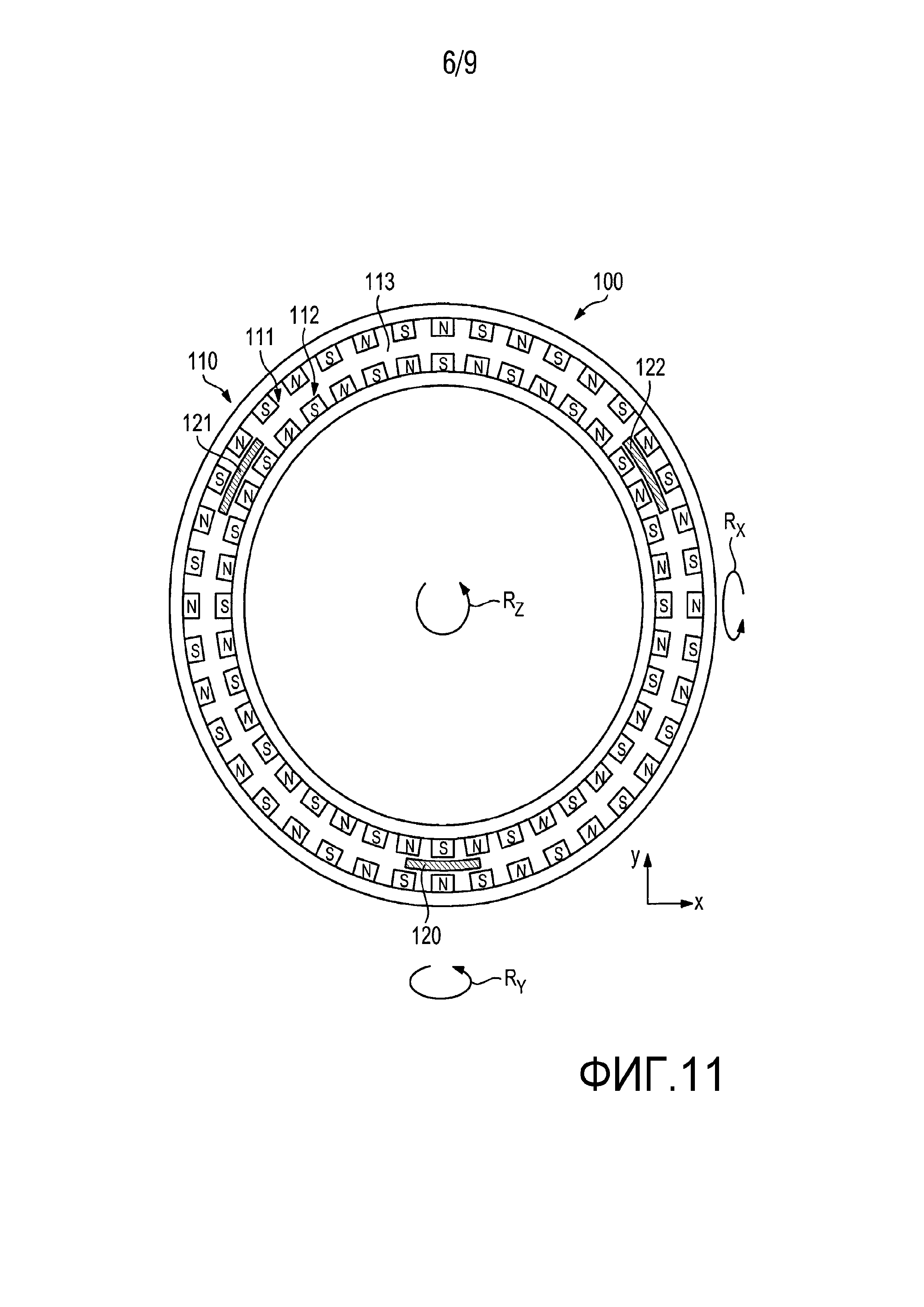
Фиг. 11 показывает изображение сверху первого варианта воплощения поворотного устройства позиционирования.
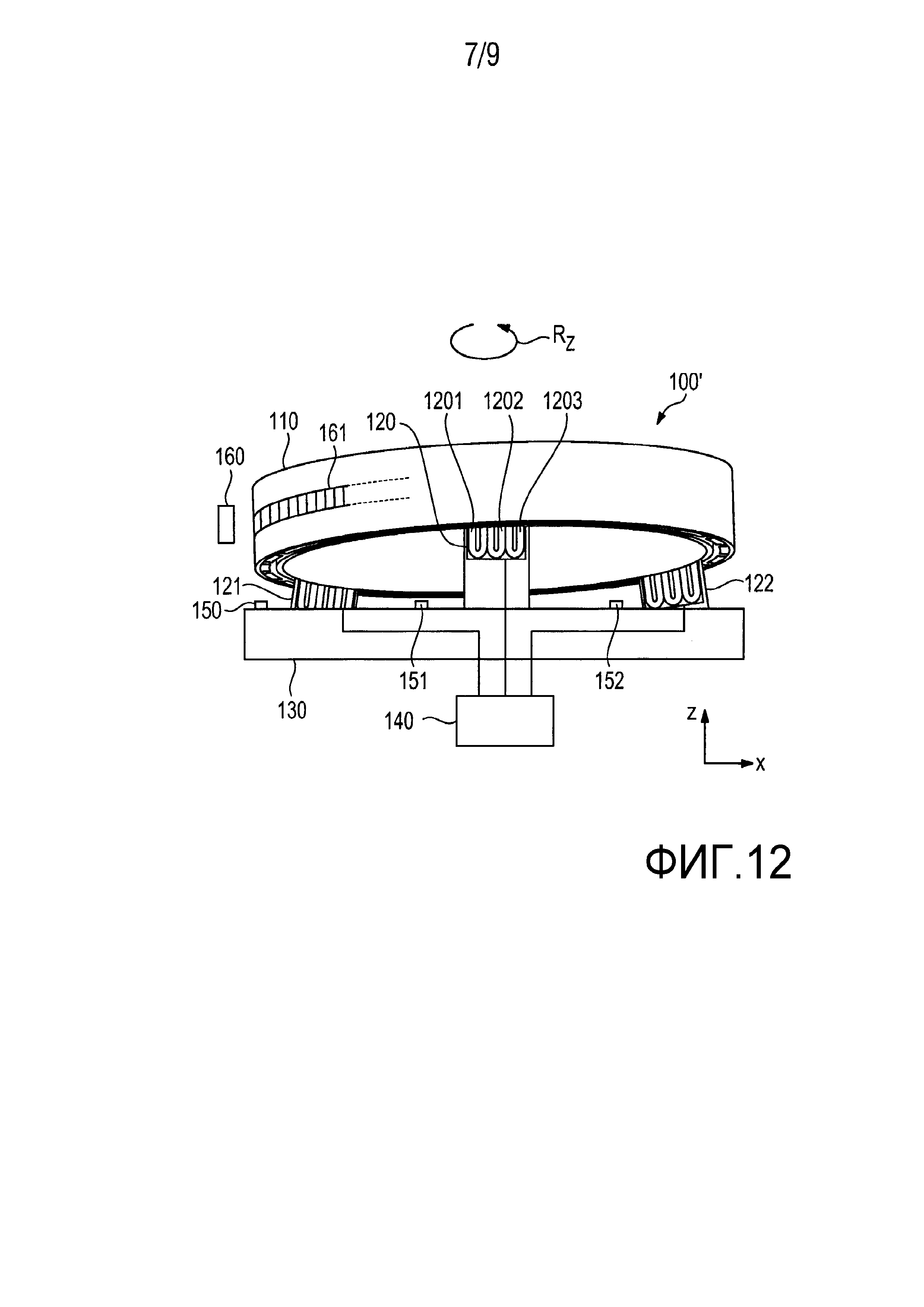
Фиг. 12 иллюстрирует перспективное изображение второго варианта воплощения поворотного устройства позиционирования согласно настоящему изобретению.
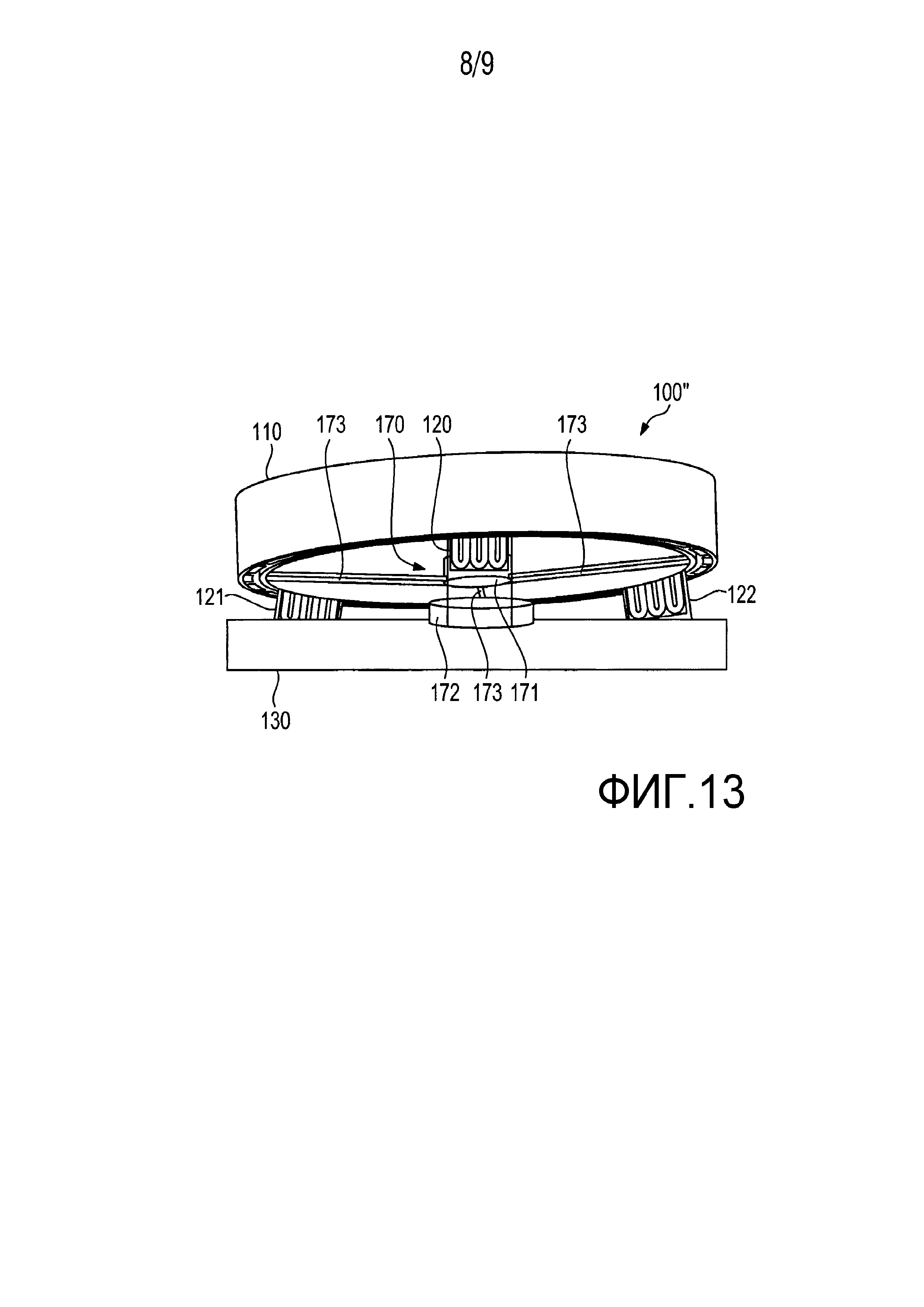
Фиг. 13 иллюстрирует перспективное изображение третьего варианта воплощения поворотного устройства позиционирования согласно настоящему изобретению.
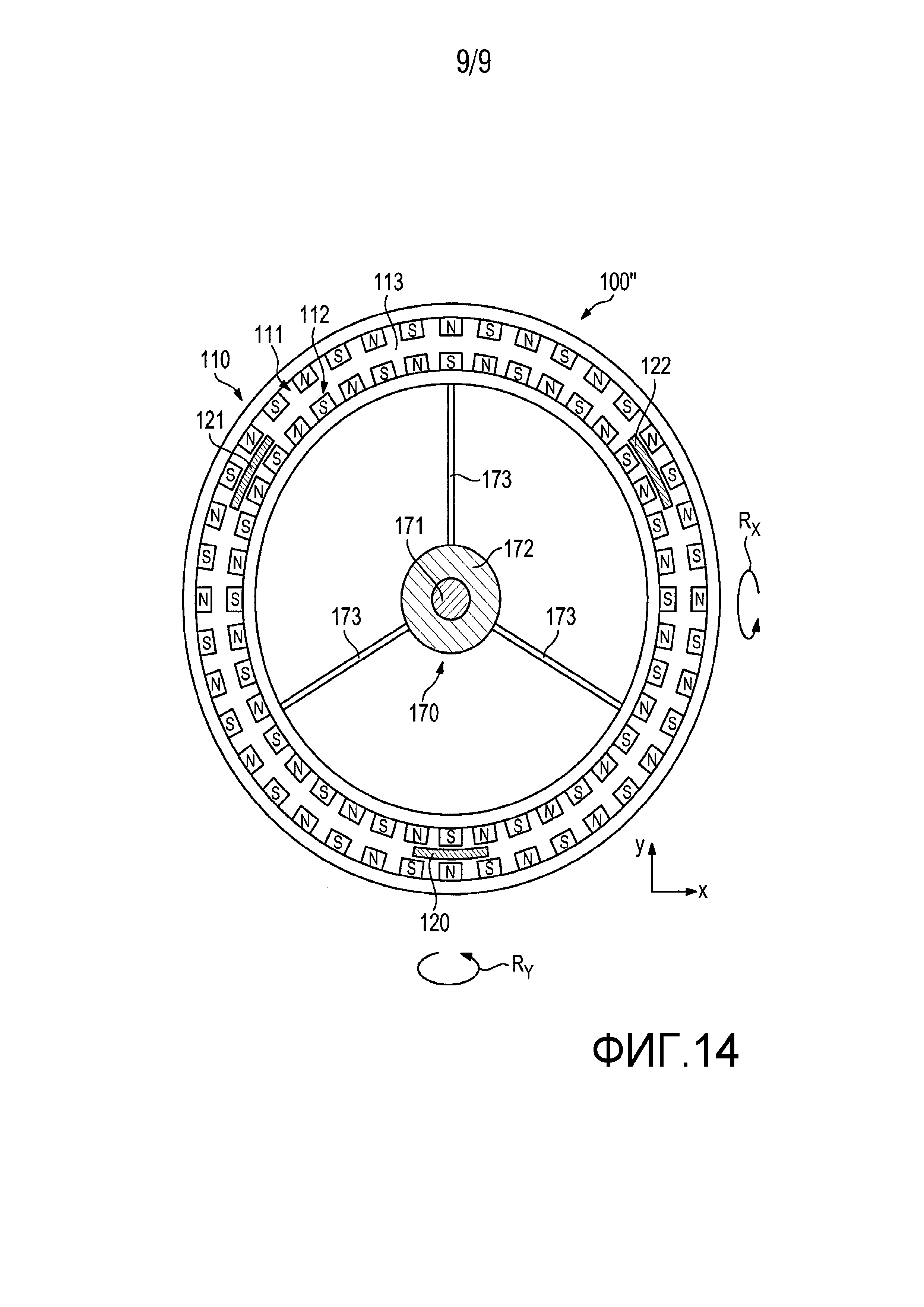
Фиг. 14 показывает изображение сверху третьего варианта воплощения поворотного устройства позиционирования.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Сначала будет кратко описан магнитный линейный двигатель без стального сердечника, известный из WO 2007/026270, который способствует более легкому пониманию предложенного поворотного устройства позиционирования, которое будет описано ниже.
Фиг. 1 показывает разрез в плоскости Y-Z первого варианта воплощения магнитного линейного двигателя 21 без стального сердечника, применяющего магнитопровод 30 и якорь 40. Фиг. 2 показывает разрез в плоскости X-Y варианта воплощения магнитопровода 30. Магнитопровод 30 включает в себя линейный магнитный массив 31 и линейный магнитный массив 32 для генерирования магнитного поля β по линейному воздушному зазору. Линейные магнитные массивы 31 и 32 имеют уровень 180° пространственного разнесения между соседними магнитами. Фиг. 3 показывает вид сбоку первого варианта воплощения магнитного линейного двигателя 21 без стального сердечника.
Обращаясь к Фиг. 1, якорь 40 расположен в линейном воздушном зазоре вдоль центральной X-Z продольной плоскости CP линейного воздушного зазора. Как показано на Фиг. 4, показывающем вид сбоку якоря 40, якорь 40 включает в себя, в качестве примера, три катушки 41-43 с уровнем 120°+n*360 пространственного разнесения (n - произвольное целое число) между соседними катушками. На Фиг. 4 катушка 41 якоря 40 представлена ее траекторией потока коммутируемого тока Iz1 левитации, катушка 42 якоря 40 представлена ее траекторией потока коммутируемого тока Iz2 левитации, а катушка 43 якоря 40 представлена ее траекторией потока коммутируемого тока Iz3 левитации.
Противоположные комплекты приводных витков 411, 412 катушек 41-43 (обозначенные только для катушки 41 на Фиг. 4), ортогональных оси X приведения в движение и параллельных оси Z левитации, находятся внутри магнитного поля β, как лучше всего показано на Фиг. 4. Один комплект левитационных витков 413 катушек 41-43 (обозначенный только для катушки 41 на Фиг. 4), параллельных оси X приведения в движение и ортогональных оси Z левитации, относительно нижней перспективы Фиг. 4, расположен вне магнитного поля β, тогда как противоположный комплект левитационных витков 414 катушек 41-43 (обозначенный только для катушки 41 на Фиг. 4), параллельных оси X приводного устройства и ортогональных оси Z левитации, относительно верхней перспективы Фиг. 4, расположен внутри магнитного поля β. В результате приложение фазового сдвига PS1 120° коммутируемых токов Iz1, Iz2 и Iz3 левитации к катушкам, соответственно, 41-43, генерирует силу Fz левитации, параллельную оси Z левитации, как лучше всего показано на Фиг. 5.
Дополнительно, линейный двигатель 21 предусматривает фазовый сдвиг наложения коммутируемых токов IZ1, IZ2 и IZ3 на, соответственно, коммутируемые токи IX1, IX2 и ΙX3 возбуждения для облегчения максимального развязывания, если не полного развязывания движущей силы Fx и силы Fz левитации. В частности, как показано на Фиг. 6, катушка 41 якоря 40 представлена ее траекторией потока для наложения коммутируемого тока IZ1 левитации на коммутируемый ток IX1 возбуждения, катушка 42 якоря 40 представлена ее траекторией потока для наложения коммутируемого тока Iz2 левитации на коммутируемый ток IX2 возбуждения, а катушка 43 якоря 40 представлена ее траекторией потока для наложения коммутируемого тока Iz3 левитации на коммутируемый ток IX3 возбуждения. Как показано на Фиг. 7, коммутируемый ток IZ1 левитации сдвинут по фазе относительно коммутируемого тока IX1 возбуждения на фазовый сдвиг PS2 90°, коммутируемый ток IZ2 левитации сдвинут по фазе относительно коммутируемого тока IX2 возбуждения на фазовый сдвиг PS2 90°, а коммутируемый ток Iz3 левитации сдвинут по фазе относительно коммутируемого тока IX3 возбуждения на фазовый сдвиг PS2 90°.
Обращаясь к Фиг. 8, представлен второй вариант воплощения магнитного линейного двигателя 22 без стального сердечника, применяющего магнитопровод 30 и якорь 40, с якорем 40, имеющим противоположную ориентацию в линейном воздушном зазоре по сравнению с ориентацией якоря 40 линейного воздушного зазора двигателя 21 (как показано на Фиг. 1). В частности, противоположные комплекты приводных витков 411, 412 катушек 41-43, ортогональных оси X приведения в движение и параллельных оси Z левитации, находятся внутри магнитного поля β, как лучше всего показано на Фиг. 9. Один комплект левитационных витков 414 катушек 41-43, параллельных оси X приведения в движение и ортогональных оси Z левитации, относительно верхней перспективы Фиг. 9, находится вне магнитного поля β, тогда как противоположный комплект левитационных витков 413 катушек 41-43, параллельных оси X приводного устройства и ортогональных оси Z левитации, относительно нижней перспективы Фиг. 9, находится внутри магнитного поля β. В результате приложение фазового сдвига PS1 120° коммутируемых токов Iz1, Iz2 и Iz3 левитации к катушкам, соответственно, 41-43, генерирует силу Fz левитации, параллельную оси Z левитации, как лучше всего показано на Фиг. 5.
Фиг. 10 показывает перспективное изображение первого варианта воплощения поворотного устройства 100 позиционирования согласно настоящему изобретению. Фиг. 11 показывает изображение сверху первого варианта воплощения поворотного устройства 100 позиционирования.
Поворотное устройство 100 позиционирования содержит кольцевой магнитопровод 110, генерирующий магнитное поле по круговому воздушному зазору 113. Кольцевой магнитопровод 110 формируют, как правило, тем же образом, что и линейный магнитопровод 30, показанный на Фиг. 2, и он включает в себя первый (внешний) кольцевой магнитный массив 111, содержащий множество магнитов, и второй (внутренний) магнитный массив 112, содержащий множество магнитов для генерирования магнитного поля по линейному воздушному зазору 113, причем магниты (т.е. магнитные полюса) каждого из упомянутых магнитных массивов 111 и 112 расположены поочередно. Кольцевые магнитные массивы 111 и 112 имеют уровень 180° пространственного разнесения между соседними магнитами, т.е. магнитный северный полюс магнитного массива 111 расположен противоположно магнитному южному полюсу магнитного массива 112.
В варианте воплощения в магнитных массивах 111 и 112 используют изогнутые магниты, которые помогают увеличить диапазон движения магнитопровода 110 в зазоре, но не обязательны для работы. Дополнительно, в варианте воплощения большее число магнитов приводит к меньшей неравномерности сил, но не требуется для работы.
Поворотное устройство 100 позиционирования дополнительно содержит три (как правило, по меньшей мере два) якоря 120, 121, 122, которые расположены, например, на (как правило, стационарно) несущей конструкции 130. Якоря могут быть того же рода, как показаны выше, в частности, на Фиг. 1, 4, 6, 8 и 9. Как правило, каждый якорь 120, 121, 122 включает в себя множество катушек (в данном варианте воплощения три катушки 1201, 1202, 1203, указанные для якоря 120). Эти катушки по меньшей мере частично расположены с кольцевым воздушным зазором 113, и каждая выполнена с возможностью генерирования силы левитации в направлении левитации (здесь в направлении Z), ортогональном кольцевому магнитопроводу 110, и движущей силы в направлении приведения в движение (здесь в направлении вращения Rz вокруг оси Z) вдоль кольцевого магнитопровода. Как показано на Фиг. 10 и 11, якоря 120, 121, 122 расположены в различных угловых положениях вдоль упомянутого кольцевого магнитопровода, предпочтительно на равных угловых расстояниях.
Дополнительно, еще поворотное устройство 100 позиционирования содержит контроллер 140 для подачи токов на упомянутые якоря 120, 121, 122 для индивидуального управления генерированием силы левитации и/или движущей силы посредством упомянутых якорей для осуществления вращательного движения (т.е., в частности, в направлении Rz) и/или движения качания (т.е., в частности, вращения в направлении Rx и/или Ry), и/или поступательного движения (т.е., в частности, в направлении X, Y и/или Z) упомянутого кольцевого магнитопровода 110.
Таким образом, (как правило, не ограниченное) вращательное движение (т.е., в частности, в направлении Rz) кольцевого магнитопровода 110 достигается посредством управления якорями 120, 121, 122 для обеспечения движущей силы. Движение качания (т.е., в частности, вращение в направлении Rx и/или Ry) кольцевого магнитопровода 110 достигается посредством управления двумя или более (в зависимости от желаемого направления качания) якорями 120, 121, 122 для обеспечения дополнительной силы левитации на одном и уменьшения силы левитации на других одном или двух якорях. Поступательное движение (т.е., в частности, в направлении X, Y и/или Z) кольцевого магнитопровода 110 достигается посредством управления одним или более якорями 120, 121, 122 для обеспечения движущей силы и/или силы левитации. В частности, для достижения поступательного движения в направлении Z, все якоря 120, 121, 122 управляются для обеспечения силы левитации. Для достижения поступательного движения в направлении X и/или Y, двумя или тремя якорями 120, 121, 122 управляют для обеспечения движущей силы, а другими якорями управляют для обеспечения силы левитации для компенсации возможных нежелательных пар наклонных положений, вызванных движущими силами, если движущие силы приводятся в действие на высоте Z, отличной от высоты центра тяжести магнитопровода.
Сила левитации всегда должна присутствовать без компенсатора силы тяжести. Движения в вертикальной плоскости реализуются за счет увеличения или уменьшения этой силы левитации. С помощью компенсатора силы тяжести (см. ниже) постоянная сила левитации реализуется с помощью пассивного элемента, например магнитов противоположной полярности или ослабленной пружины.
Таким образом, согласно варианту воплощения предложенного поворотного устройства позиционирования, обеспечена бесконтактная платформа линейного движения с шестью DOF (степенями свободы), с активным управлением шестью DOF, включающим в себя три многофазных якоря без стального сердечника, в сочетании с кольцевым магнитопроводом. Никакого дополнительного наведения не требуется. Поворотное устройство позиционирования также действует как активный направляющий компонент, который может быть дополнительно использован в качестве функционального рабочего хода в пяти степенях свободы, перпендикулярных направлению вращения.
Для управления устройством позиционирования в варианте воплощения обнаруживают положение магнитопровода. Затем рассчитывают погрешность в определении местоположения в декартовых координатах (x, y, Rx, Ry, Rz) относительно желаемой заданной координаты. После чего рассчитывают требуемую силу для корректировки заданной координаты. Затем рассчитывают требуемую силу левитации и движущую силу на привод. Наконец, рассчитывают два позиционно зависимых тока (коммутируемых тока) для получения требуемых сил на привод.
Как правило, устройством позиционирования можно управлять посредством прикладного контроллера на различных уровнях, в зависимости от того, как много функциональности реализовано в контроллере устройства позиционирования. Самый нижний уровень предназначен для направления каждого привода с помощью двух токов, которые являются позиционно зависимыми (коммутируемыми), и зависимы от движущей силы и силы левитации. На следующем уровне реализуется коммутация каждого привода в контроллере, что означает, что прикладной контроллер сообщает требуемую силу левитации и движущую силу контроллеру устройства позиционирования, который, в свою очередь, рассчитывает требуемые токи. На еще одном уровне прикладной контроллер сообщает ортогональные силы (x, y, z, Rx, Ry, Rz) контроллеру устройства позиционирования (который действует, как и на предыдущем уровне, упомянутом выше). Наконец, на другом уровне прикладной контроллер обеспечивает заданные координаты местоположения и профили движения (например, v, a, j, где v=скорость, a=ускорение, j=темп) контроллеру.
Фиг. 12 показывает перспективное изображение второго варианта воплощения поворотного устройства 100' позиционирования согласно настоящему изобретению. Согласно этому варианту воплощения позиции X, Y, Z, Rx и/или Ry измеряют посредством многочисленных датчиков 150, 151, 152, например, посредством индуктивно-емкостных датчиков, помещенных на неподвижную основу, например, на несущую конструкцию 130, смотрящую на базовую поверхность ротора. Дополнительно, в этом варианте воплощения позицию Rz измеряют с помощью традиционной оптической линейной измерительной системы, содержащей шкалу 161 и головку 160 датчика, предпочтительно, со шкалой, помещенной на перемещаемое тело, т.е. кольцевой магнитопровод.
В альтернативном варианте воплощения (не показан) могут быть использованы многочисленные головки кодирующего устройства, которые помещают на неподвижную основу, а шкалы помещают на перемещаемое тело (кольцевой магнитопровод), для измерения всех шести степеней свободы. Например, с помощью конфигурации из трех головок кодирующего устройства, смотрящих на одну поворотную шкалу, могут быть измерены три степени свободы.
Однако в равной мере может быть применим любой другой тип датчика, подходящего для требуемых диапазонов.
Фиг. 13 показывает перспективное изображение третьего варианта воплощения поворотного устройства 100" позиционирования согласно настоящему изобретению. Фиг. 14 показывает изображение сверху третьего варианта воплощения поворотного устройства 100" позиционирования. Согласно этому варианту воплощения компенсатор 170 силы тяжести расположен в центре магнитопровода 110 для компенсации силы тяжести.
В этом варианте воплощения компенсатор 170 силы тяжести реализован с помощью двух магнитов 171, 172 противоположной полярности в центральной области устройства 100" позиционирования. Один магнит 171 устанавливают на движущемся магнитопроводе 110, например, с использованием радиально расположенных спиц 173. Другой магнит 172 располагают статично, например устанавливают на несущей конструкции 130. Магниты 171, 172, например, располагают таким образом, чтобы их полярности были направлены в противоположных направлениях. Например, в варианте воплощения северный полюс магнита 171 обращен к магниту 172, северный полюс которого обращен к магниту 171.
Таким образом, магниты 171, 172 обеспечивают статическую силу для левитации магнитопровода 110, со снижением постоянного тока, который в ином случае пришлось бы пропускать через катушки якорей 120, 121, 122, для подъема магнитопровода 110. Эта реализация приводит к высокой устойчивости между магнитопроводом 110 и статичной несущей конструкцией 130. В других конфигурациях используют магниты или компенсаторы силы тяжести, обладающие более низкой устойчивостью или ослабленные пружины.
В итоге, согласно варианту воплощения настоящего изобретения, обеспечено плавающее в шести степенях свободы, полностью магнитно левитирующее, поворотное устройство позиционирования, с кольцевым магнитопроводом без стального сердечника, тремя многофазными якорями, соответствующими датчиками и схемой управления. Устройство можно дополнить компенсатором силы тяжести, например, использующим постоянный магнит в центре вращения, для компенсации сил тяжести.
Устройство может быть выполнено полностью без механических контактов, тем самым способствуя работе в вакууме, продолжительному сроку службы с низким загрязнением. Благодаря специфическому сочетанию якорей очень экономичная, облегченная и простая конструкция снабжена относительно небольшим заявленным объемом, что, как правило, делает возможным высокие ускорения и скорости. Рассеяние мощности также относительно невелико, поскольку движущаяся масса ограничена конструкцией, и по меньшей мере для конфигураций с компенсатором силы тяжести для компенсации силы тяжести простые силы тяжести компенсируются силами, вызванными компенсатором силы тяжести.
С помощью предложенных якорей могут быть достигнуты независимые усилия срабатывания в двух ортогональных направлениях, например, с помощью только изготовленных якорей линейных двигателей и магнитопроводов, при совмещении двух принципов изменения направления тока, которые ортогональны. Таким образом, линейный двигатель (с одним главным направлением силы) становится плоским двигателем (со второй независимой адресуемой силой в перпендикулярном первой силе направлении).
С помощью предложенной высокотехнологичной конфигурации из двух или более таких якорей в сочетании с кольцевым магнитопроводом, например трех якорей, расположенных под углом 120°, достигаются следующие преимущества:
Продолжительный срок службы: благодаря отсутствию механического контакта в подшипниках, срок службы устройства теоретически может быть бесконечным.
Динамическая эффективность: отсутствие механического контакта (= сил трения) обеспечивает более точное позиционирование устройства.
Беспроводная конструкция: (потенциальное) отсутствие какой-либо разводки кабелей между неподвижной основой и движущимся устройством будет дополнительно увеличивать срок службы и динамическую эффективность (благодаря отсутствию возмущающих сил, вызванных разводкой кабелей).
Пониженная сложность и стоимость устройства: по сравнению с другими устройствами, которые используют приводы для каждой из шести степеней свободы, предложенное изобретение требует только три привода для шести степеней свободы.
Отсутствие загрязнений: благодаря отсутствию механического контакта в устройстве можно избежать образования нежелательных частиц, что делает устройство подходящим, например, для применений в производстве полупроводников. Благодаря отсутствию смазочных веществ можно будет избежать любого молекулярного загрязнения (например, из-за выхода газов или перекрестного загрязнения), связанного со смазочными веществами.
Потенциальные области применения изобретения.
- Оборудование для производства полупроводников, электронных блоков и автоматики.
- Установки позиционирования общего пользования для позиционирования образцов и/или подложек в реакционноспособных или агрессивных средах (без разводки кабелей, без искрения, без смазочных веществ).
- Установки позиционирования, подходящие для высоких ускорений и скоростей (облегченные, при этом соотношение максимальная сила/движущаяся масса является очень высоким для этой конструкции).
- Устройства позиционирования для применения в вакуумных средах.
- Производственное оборудование.
- Устройства позиционирования для медицинских применений (например, лепестки затвора в рентгеновских устройствах).
- Бытовая электроника (системы приводов CD/DVD/Blu-Ray).
- Накопитель энергии (маховое колесо).
В то время как изобретение было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такую иллюстрацию и описание следует рассматривать как иллюстративную или примерную, а не ограничивающую; изобретение не ограничено раскрытыми вариантами воплощения. Другие разновидности раскрытых вариантов воплощения могут быть поняты и выполнены специалистами в данной области техники при реализации на практике заявленного изобретения, исходя из изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, а неопределенный артикль «a» или «an» не исключает множества. Одиночный элемент или другой блок может выполнять функции нескольких объектов, перечисленных в формуле изобретения. Сам факт, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что не может быть с выгодой использовано сочетание этих мер.
Никакие ссылочные обозначения в формуле изобретения не следует истолковывать как ограничивающие объем.
Зубная щетка, имеющая щетиночную область, содержащую составной узел из слоев основных и щетиночных компонентов
Идентификация медицинских концепций для выбора протокола визуализации
Полупроводниковая пластина и способ ее изготовления
Емкостной преобразователь, полученный микрообработкой, и способ его изготовления
Отображение в реальном времени видов сосудистой сети для оптимального перемещения устройства
Устройство оптического мониторинга для мониторинга значения кривизны гибкого медицинского инструмента
Адаптивное ключевое сжатие для динамической магнитно-резонансной визуализации с улучшенной контрастностью
Устройство и способ поддержки выполнения отображения данных изображения
Ингалятор и способ изготовления ингалятора
Новые материалы и способы для диспергирования наночастиц в матрицы с высокими квантовыми выходами и стабильностью
Зубная щетка, имеющая щетиночную область, содержащую составной узел из слоев основных и щетиночных компонентов
Идентификация медицинских концепций для выбора протокола визуализации
Полупроводниковая пластина и способ ее изготовления
Емкостной преобразователь, полученный микрообработкой, и способ его изготовления
Отображение в реальном времени видов сосудистой сети для оптимального перемещения устройства
Устройство оптического мониторинга для мониторинга значения кривизны гибкого медицинского инструмента
Адаптивное ключевое сжатие для динамической магнитно-резонансной визуализации с улучшенной контрастностью
Устройство и способ поддержки выполнения отображения данных изображения
Ингалятор и способ изготовления ингалятора
Новые материалы и способы для диспергирования наночастиц в матрицы с высокими квантовыми выходами и стабильностью

