Результат интеллектуальной деятельности: ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР
Вид РИД
Изобретение
Предлагаемое устройство относится к области специальной радиолокационной техники и может быть использовано при разработке и построении современных помехозащищенных комплексов обнаружения и целеуказания, а также при построении РЛС наведения оружия.
Современная радиолокационная обстановка в условиях боевых действий предполагает обязательное одновременное воздействие на радиолокационную станцию как пассивных так и активных помех. Такая ситуация наиболее характерна для РЛС обнаружения низколетящих целей, а также для корабельных РЛС обнаружения и целеуказания, поскольку в этих случаях практически всегда имеются мощные отражения от подстилающей поверхности и одновременно возможна постановка противником активных помех, из которых в настоящее время наиболее универсальными являются шумовые помехи, которые с успехом могут быть использованы для подавления радиоэлектронных средств любого назначения.
Таким образом, для успешного обнаружения целей и носителей станций радиопомех современный радиолокатор должен строиться с учетом обеспечения защищенности как от пассивных, так и активных помех, действующих в одно и то же время.
Известны радиолокаторы (см., например, патент США №3866224 по кл. G01S 7/28, G01S 7/36, 1975 г., патент США №4038659 по кл. G01S 7/28, 1977 г., патент Японии №50-29631 по кл. G01S 9/08, 1975 г., патент Франции №1605536 по кл. G01S 7/36, 1974 г.), в которых для увеличения помехоустойчивости в условиях воздействия активных помех применяется перестройка частоты излучения. Однако в этих радиолокаторах не обеспечивается защита от пассивных помех и в условиях воздействия комбинированных (активные плюс пассивные) помех они могут оказаться совершенно неработоспособными.
Известен также импульсный когерентный радиолокатор, который, благодаря совмещению электронной перестройки рабочей частоты с одновременной работой аппаратуры селекции движущихся целей, может работать в условиях одновременного воздействия пассивных и активных ответных помех. В то же время из-за присущих данному радиолокатору ограничений по перестройке несущей частоты (используются только две несущие частоты при отсутствии автоматического анализа помеховой обстановки) он может оказаться полностью неработоспособным в условиях воздействия пассивных и заградительных шумовых помех.
Наиболее близким по технической сущности к заявляемому объекту является радиолокатор.
Для упрощения дальнейших выкладок и уточнения применяемой в патентной литературе и периодической печати терминологии в схеме радиолокатора ряд устройств, не имеющих принципиально важного значения для понимания сути заявляемого предложения, можно объединить. Так, соединенные известным образом линию задержки и компенсирующее устройство будем в дальнейшем называть просто схемой компенсации. Далее, дешифратор, устройство сложения мощностей, разветвитель мощности и видеодетектор, входящие в радиолокатор, объединим и назовем селектором частоты, как это, например, сделано в передатчике с быстрой перестройкой частоты, описанном в книге Г.М. Вишина. Многочастотная радиолокация, Воениздат МО СССР, М., 1973 г.
Кроме того, более точно следовало бы назвать генератор промежуточной частоты когерентным гетеродином, а генератор запуска зондирующего сигнала - синхронизатором.
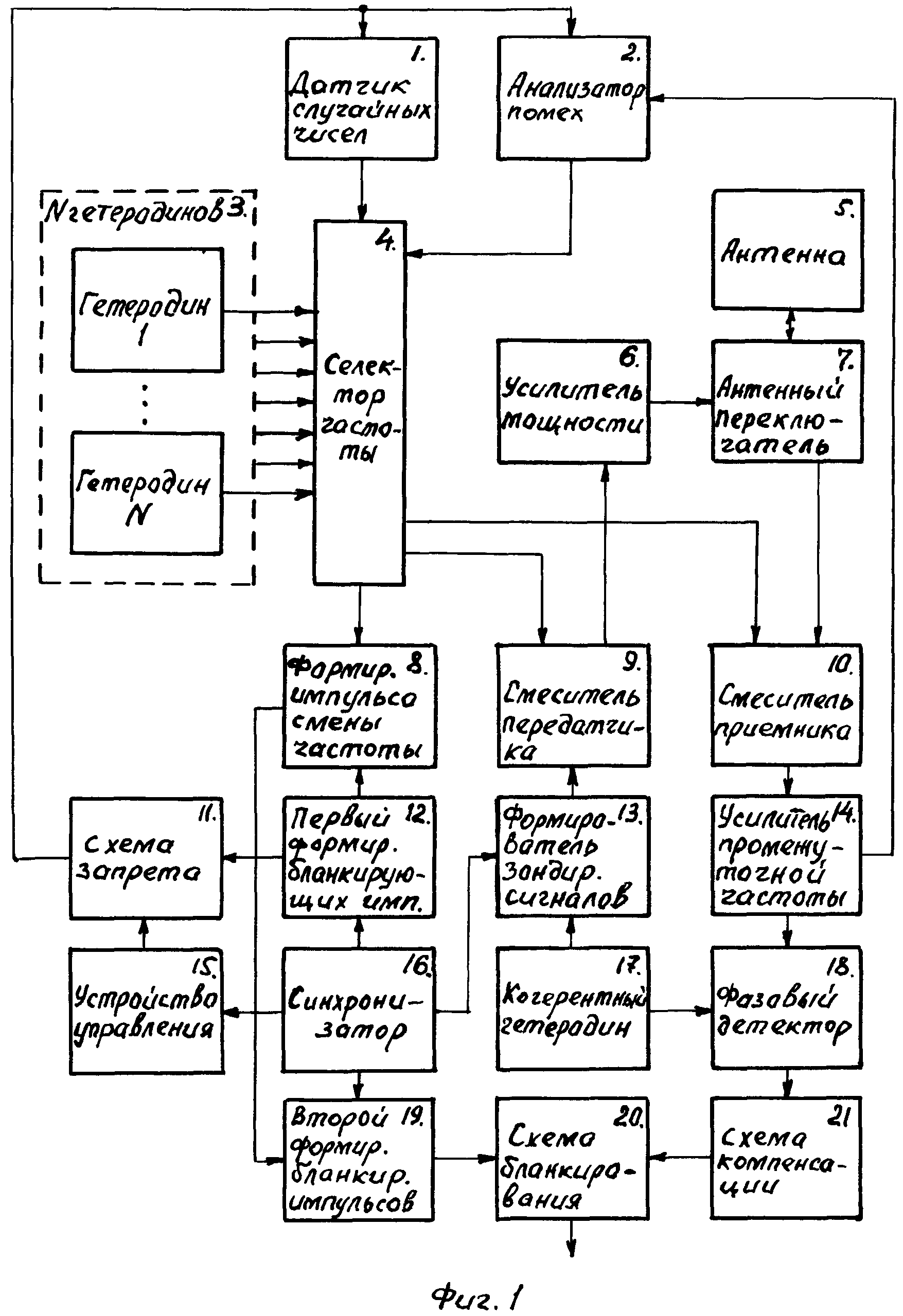
Рассмотрим блок-схему выбранного в качество прототипа радиолокатора, которая приведена на фиг.1.
Этот радиолокатор содержит последовательно соединенные антенну 5, антенный переключатель 7, смеситель приемника 10, усилитель промежуточной частоты 14, фазовый детектор 18, схему компенсации 21 и схему бланкирования 20, подключенный к опорному входу фазового детектора 18 когерентный гетеродин 17, другой выход которого через последовательно соединенные формирователь зондирующего сигнала 13, смеситель передатчика 9 и усилитель мощности 6 соединен с антенным переключателем 7, N гетеродинов 3, выходы которых подключены к селектору частоты 4, выходы которого соединены со смесителем приемника 10, смесителем передатчика 9 и через последовательно включенные формирователь импульса смены частоты 8 и второй формирователь бланкирующего импульса 19 со схемой бланкирования 20, синхронизатор 16, один из выходов которого через устройство управления 15 и схему запрета 11 подключен ко входам соединенного с усилителем промежуточной частоты 14 анализатора помех 2 и датчика случайных чисел 1, выходы которых подключены к селектору частоты 4, а также первый формирователь бланкирующего импульса 12, выходы которого соединены со схемой запрета 11 и формирователем импульса смены частоты 8, причем, другие выходы синхронизатора 16 подключены к первому 12, второму 19 формирователям бланкирующих импульсов и к формирователю зондирующего сигнала 13.
Такая совокупность блоков и связей обеспечивает обнаружение целей в условиях одновременного воздействия на РЛС пассивных и непрерывных шумовых помех, прицельных по частоте. По результатам быстродействующего анализа помеховой обстановки радиолокатор автоматически настраивается на частоту, свободную от помех.
В случае одновременного воздействия пассивных и заградительных шумовых помех в радиолокаторе, рассматриваемом в качестве прототипа, в каждом цикле перестройки с помощью анализатора помех 2 определяется частота, на которой в данный момент спектральная плотность мощности помехи минимальна или помеха полностью отсутствует. Далее радиолокатор работает на этой частоте до тех пор, пока анализатором помех 2 не будет обнаружена другая частота с минимумом спектральной плотности помехи.
Однако, поскольку полоса частот заградительной шумовой помехи обычно превышает полосу частот перестройки радиолокатора, полностью избежать ее вредного воздействия путем перестройки частоты нельзя. Присутствие на входе радиолокатора шумовой помехи (хотя он и работает на частоте с минимальным уровнем спектральной плотности мощности помехи) приводит к уменьшению отношения сигнал/шум.
С другой стороны, при высоких скоростях обзора пространства и узких диаграммах анаправленности антенн современных РЛС количество импульсов, отраженных от цели за один обзор, обычно равно 3-25 (см. например, Справочник по основам радиолокационной техники под ред. В.В. Дружинина. Воениздат МО СССР, М., 1967 г.).
Для рассматриваемого в качестве прототипа радиолокатора число импульсов от цели за один обзор соизмеримо с числом периодов повторения, в течение которых он должен работать на одной частоте. Так, при кратности схемы череспериодной компенсации равной 2-3 длительность цикла перестройки должна быть не менее 3÷4 (обычно 8÷10) периодов повторения. Таким образом, при высоком темпе обзора в радиолокаторе, рассматриваемом в качестве прототипа, цель обнаруживается практически при зондировании пространства одной частотой, что дополнительно вызывает потери за счет флуктуаций цели, которые составляют примерно 8 дБ при вероятности обнаружения 0,9 (см., например, Бартон Д.К., Простая методика расчета характеристик обнаружения целей и дальности действия РЛС "Зарубежная радиоэлектроника", №5, 1970 г.).
В условиях одновременного воздействия пассивных и заградительных шумовых помех групповая перестройка частоты по закону случайных чисел в радиолокаторе, рассматриваемом в качестве прототипа, также не приводит к улучшению отношения сигнал/шум и не позволяет устранить флуктуационные потери, так как скорость перестройки групп при этом остается такой же, как и в случае адаптивной перестройки. Кроме того, при произвольном выборе частоты излучения без анализа помеховой обстановки выбираются также частоты, на которых помеха максимальна.
В итоге уменьшение отношения сигнал/шум за счет воздействия заградительной шумовой помехи и появление флюктуационных потерь при быстром обзоре пространства приводят к существенному снижению вероятности обнаружения целей, особенно быстрофлюктуирующих, радиолокатором, рассматриваемым в качестве прототипа.
Целью настоящего изобретения является повышение вероятности обнаружения целей в условиях одновременного воздействия пассивных и заградительных шумовых помех.
Поставленная цель достигается тем, что в импульсный когерентный радиолокатор, содержащий последовательно соединенные антенну 5, антенный переключатель 7, смеситель приемника 10, усилитель промежуточной частоты 14, фазовый детектор 18, схему компенсации через два периода 21 и схему бланкирования 20, управляющий вход которой подключен к выходу формирователя бланкирующих импульсов 19, N гетеродинов 3, выходы которых соединены со входами селектора частоты 4, выходы которого подключены к гетеродинным входам смесителя приемника 10 и смесителя передатчика 9, выход которого через усилитель мощности 6 соединен с антенным переключателем 7, подключенный к одному из выходов усилителя промежуточной частоты 14 анализатор помех 2, управляющий вход которого соединен с устройством управления 15, выход которого подключен к селектору частоты 4, соединенный с опорным входом фазового детектора 18 когерентный гетеродин 17, второй выход которого через формирователь зондирующих сигналов 13 подключен к сигнальному входу смесителя передатчика 9, а также синхронизатор 16, выходы которого соединены с устройством управления 15 и формирователем зондирующих сигналов 13, введены счетчик импульсов 24, установочный вход которого подключен к выходу формирователя бланкирующих импульсов 19, электронный коммутатор 28, выход которого соединен с устройством управления 15, первая 22 и вторая 23 схемы совпадения, первые входы которых подключены к выходу счетчика импульсов 24, сигнальный вход которого соединен с синхронизатором 16, устройство сравнения 25, выходы которого подключены ко вторым входам схем совпадения 22 и 23, первое 26 и второе 27 запоминающие устройства, выходы которых соединены со входами электронного коммутатора 28 и устройства сравнения 25, третий вход которого подключен к первому выходу анализатора помех 2, причем выходы первой 22 и второй 23 схем совпадения соединены с установочными входами соответственно первого 26 и второго 27 запоминающих устройств, второй выход анализатора помех 2 подключен к четвертому входу устройства сравнения 25 и к информационному входу первого запоминающего устройства 26, третий выход анализатора помех 2 соединен с пятым входом устройства сравнения 25 и с информационным входом второго запоминающего устройства 27, а входы формирователя бланкирующих импульсов 19 подключены к выходам схем совпадения 23 и 22, запоминающих устройств 26 и 27 и электронного коммутатора 28, управляющий вход которого соединен с синхронизатором 16.
На фиг.1 приведена блок-схема радиолокатора, выбранного в качестве прототипа.
На фиг.2 приведена блок-схема заявляемого импульсного когерентного радиолокатора.
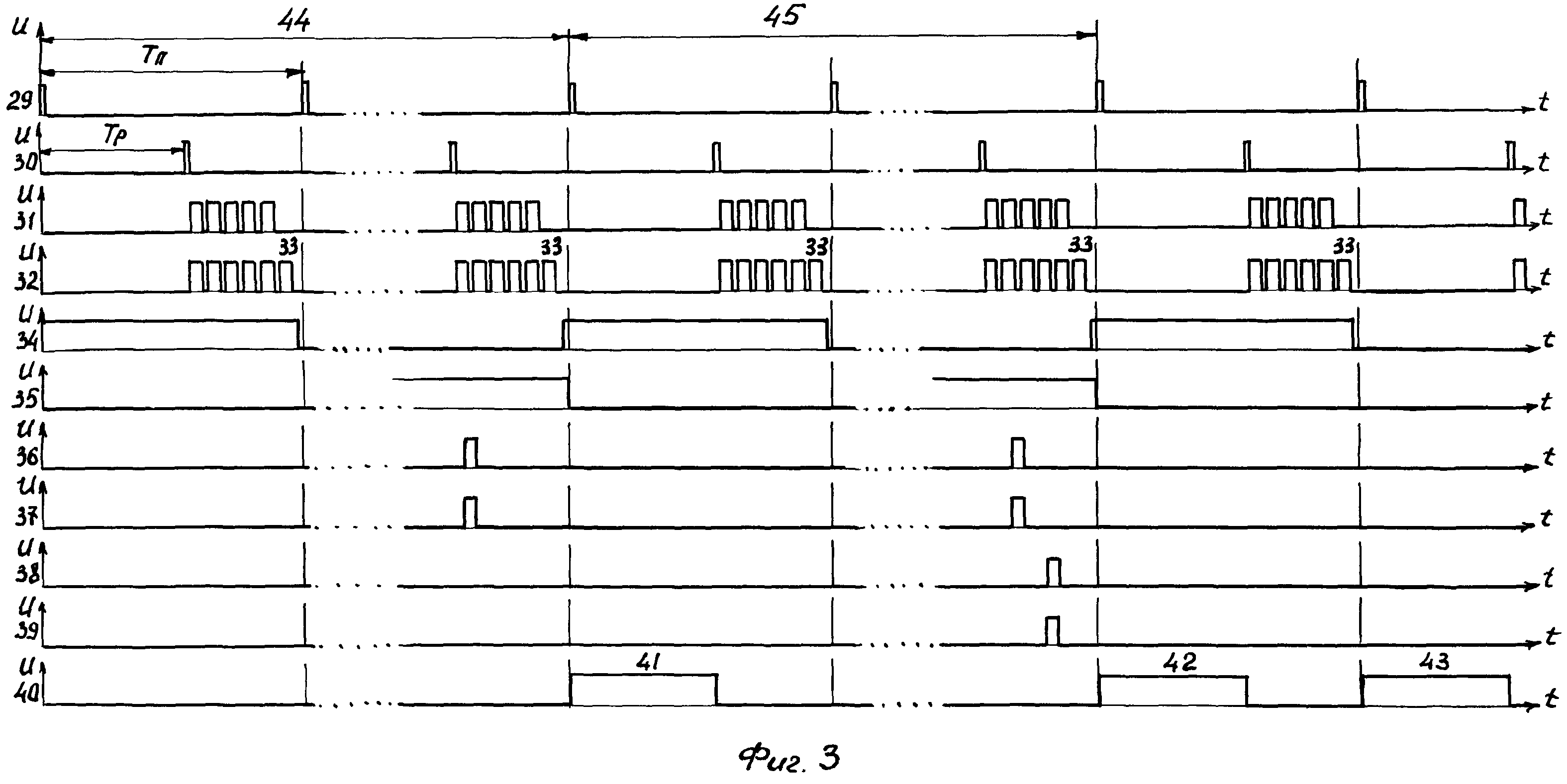
На фиг.3 приведены эпюры напряжений в схеме заявляемого радиолокатора, поясняющие его работу.
Импульсный когерентный радиолокатор, блок-схема которого приведена на фиг.2, содержит N гетеродинов 3, селектор частоты 4, антенну 5, усилитель мощности 6, антенный переключатель 7, анализатор помех 2, устройство управления 15, смесители передатчика 9 и приемника 10, синхронизатор 16, формирователь зондирующих сигналов 13, усилитель промежуточной частоты 14, когерентный гетеродин 17, фазовый детектор 18, схему компенсации через два периода 21, схему бланкирования 20, формирователь бланкирующих импульсов 19, первую 22 и вторую 23 схемы совпадения, устройство сравнения 25, счетчик импульсов 24, первое 26 и второе 27 запоминающее устройства и электронный коммутатор 28.
В отличие от схемы компенсации, примененной в известном радиолокаторе, упомянутая схема компенсации через два периода 21 содержит линию задержки на два периода повторения и компенсирующее устройство, соединенные известным образом. В заявляемом объекте возможно применение как одно-, так и двукратной схемы компенсации через два периода, которая может быть выполнена как в аналоговом, так и в цифровом виде.
Введение схем совпадения 22 и 23, счетчика импульсов 24, устройства сравнения 25, запоминающих устройств 26 и 27 и электронного коммутатора 28 в заявляемый когерентный радиолокатор с аппаратурой селекции движущихся целей и групповой перестройкой несущей частоты позволяет осуществить дополнительную перестройку несущей частоты в пределах каждой группы импульсов.
Таким образом, в заявляемом радиолокаторе в каждом цикле перестройки несущей частоты цель облучается по крайней мере на двух частотах, поочередная смена которых производится автоматически через период повторения, чем достигается повышение вероятности обнаружения целей в сложной помеховой обстановке за счет уменьшения отрицательного влияния флуктуаций отраженных сигналов на характеристики обнаружения.
Рассмотрим работу заявляемого импульсного когерентного радиолокатора. Допустим, что в исходном состоянии первое 26 и второе 27 запоминающее устройства, а также счетчик импульсов 24 обнулены. Радиолокатор работает на одной из частот, выбранной устройством управления 15. СВЧ мощность на частоте выбранного гетеродина (из N гетеродинов 3) через селектор частоты 4 поступает на гетеродинные входы смесителей передатчика 9 и приемника 10. Синхронизатор 16 каждый период повторения Тп генерирует импульсы запуска 29. Под действием импульсов 29 из напряжения когерентного гетеродина 17 в формирователе зондирующих сигналов 13 формируется радиоимпульс с заданным законом модуляции, который в смесителе передатчика 9 переносится на СВЧ, усиливается усилителем мощности 6, проходит антенный переключатель 7 и излучается антенной 5. Эхо-сигналы и помехи принимаются антенной 5, в смесителе приемника 10 переносятся на промежуточную частоту, усиливаются усилителем промежуточной частоты 14 и поступают на фазовый детектор 18, где сравниваются по фазе с напряжением когерентного гетеродина 17. Видеосигналы с выхода фазового детектора 18 подаются на схему компенсации 21, где подавляются отражения от пассивных помех, и через схему бланкирования 20, которая в исходном состоянии открыта, поступают на устройства отображения радиолокационной информации.
Теперь рассмотрим работу радиолокатора в условиях одновременного воздействия пассивных и заградительных шумовых помех. Каждый период повторения Тп по окончанию рабочего времени Тр синхронизатор 16 формирует импульсы 30, запускающие устройство управления 15. Под действием импульсов 30 устройство управления 15 формирует в каждом периоде повторения пачку импульсов 31 для управления селектором частоты 4 и пачку импульсов 32 для управления анализатором помех 2. Количество импульсов в пачке 31 соответствует количеству гетеродинов N. В каждом периоде повторения под действием импульсов 31 с помощью селектора частоты 4 на нерабочем участке дальности N гетеродинов 3 поочередно подключаются к смесителю приемника 10. Синхронно с этим процессом под действием импульсов 32 анализатор помех 2 измеряет и запоминает спектральную плотность мощности помехи на каждой из частот.
В течении длительности последнего импульса 33 из пачки импульсов 32 анализатором помех 2 выбираются две частоты, на которых уровень помехи минимальный.
Анализатор помех 2, устройство сравнения 25 и запоминающее устройство 26 и 27 выполнены на элементах цифровой техники и все измерения и сравнения производятся в цифровом виде.
Коды номеров выбранных частот и коды уровня спектральной плотности мощности помехи на этих частотах запоминаются анализатором помех 2 на период повторения. Одновременно эти коды записываются соответственно в первое 26 и второе 27 запоминающее устройства, которые в исходный момент времени обнулены. С выходов запоминающих устройств 26 и 27 коды номеров выбранных частот поступают на сигнальные входы электронного коммутатора 28, который управляется сигналами 34 синхронизатора 16.
Фиг.3 иллюстрирует пример работы радиолокатора в установившемся режиме, когда запоминающие устройства 26 и 27 заполнены. Там же показаны две группы периодов повторения 44 и 45, в течение которых радиолокатор работает поочередно на двух частотах с минимальным уровнем помехи, причем для упрощения рисунка показаны только первый и последний периоды повторения каждой группы.
И так, в первый период повторения группы 44 в запоминающие устройства 26 и 27 записана информация о выбранных частотах с минимумом помехи.
Под действием импульсов 34 электронный коммутатор 28 поочередно через период повторения подключает выходы запоминающих устройств 26 и 27 к устройству управления 15, где формируются команды на подключение соответствующих гетеродинов из N гетеродинов 3. Таким образом, радиолокатор определенное время работает с череспериодной сменой двух выбранных частот.
Одновременно с началом очередного цикла работы счетчик импульсов 24 подсчитывает количество импульсов запуска 29 с выхода синхронизатора 16. Сигнал 35 на выходе счетчика импульсов 24, который служит признаком того, что можно произвести очередную смену выбранных ранее частот, появляется по истечении L периодов повторения. L определяется следующим образом:
L≥n+1,
где n - кратность схемы компенсации через два периода 21. Обычно для уменьшения потерь радиолокационной информации выбирают
L=n+(2÷6).
В течение L периодов повторения (например, 44 и 45) радиолокатор работает с череспериодной сменой двух выбранных ранее частот, коды номеров которых записаны в запоминающих устройствах 26 и 27.
При этом очередная смена частот (содержание первого 26 и второго 27 запоминающих устройств) не производится до тех пор, пока на установочных входах запоминающих устройств 26 и 27 не появляются сигналы с выходов схем совпадения 22 и 23.
В каждом периоде повторения анализатор помех 2 работает по вышеописанному алгоритму и выдает на каждый из пачки импульсов 32 (за исключением импульса 33) код номера включенного частотного канала и уровень спектральной плотности мощности помехи на этой частоте. Результаты анализа помеховой обстановки с первого выхода анализатора помех 2 каждый раз подаются на устройство сравнения 25, на других входах которого постоянно присутствует информация о номерах ранее выбранных частотных каналов и уровне помехи на этих частотах (в момент выборки) устройство сравнения 25 включается в момент совпадения кода номера включенной частоты с выхода анализатора помех 2 и кода номера частоты, который записан в одно из запоминающих устройств 26 или 27 (по порядку включения частот устройством управления 15). В этот момент в устройстве сравнения 25 сравниваются коды уровня помехи на рабочих частотах, полученные в последнем периоде повторения, с кодами уровня помехи, записанными в запоминающих устройствах 26 и 27 в первый из L периодов повторения (т.е. в начале цикла перестройки).
Одновременно для устранения ложных перестроек частоты и дополнительных потерь радиолокационной информации на четвертый и пятый входы устройства сравнения 25 подается информация о номерах частотных каналов с минимальным уровнем помех, которые выбраны анализатором помех 2 в предыдущем периоде повторения.
Если в результате сравнения окажется, что уровень помехи, полученный на одной из частот в момент сравнения, превышает уровень помехи на этой же частоте, записанный в соответствующем устройстве 26 или 27 и при этом в предыдущем периоде повторения анализатором помех 2 были выбраны номера частотных каналов, отличные от того, на частоте которого производится сравнение, то на одном из выходов устройства сравнения 25 появляется импульс 36 или 38. Импульсы 36 подаются на второй вход схемы совпадения 22 (если в устройстве сравнения 25 сравнивались коды с выходов анализатора помех 2 и первого запоминающего устройства 26), а импульсы 38 подаются на второй вход схемы совпадения 23 (при сравнении кодов анализатора помех 2 и второго запоминающего устройства 27). Если одновременно с появлением импульсов 36 или 37 на первых входах схем совпадения 22 и 23 присутствует сигнал 35 с выхода счетчика импульсов 24, то на выходах схем совпадения появляются импульсы 37 (на выходе схемы совпадения 22) или 38 (на выходе схемы совпадения 23), которые разрешают очередную смену той из частот, на которой повысился уровень помех (или обеих частот в случае появления в одном и том же периоде повторения как импульса 37 так и импульса 37).
Для обеспечения нормальной работы аппаратуры селекции движущихся целей при смене частот зондирования и устранения засветки индикатора РЛС за счет переходных процессов в схеме компенсации через два периода 21 выход последний бланкируется схемой бланкирования 20 на длительность переходного процесса. На фиг.3 показаны два случая, когда по окончании L периодов повторения требуется смена одной из выбранных частот (44) и смена обеих выбранных частот (45), а применяемая схема компенсации через два периода 21 имеет кратность, равную 1 (длительность переходного процесса - один период повторения).
В группе импульсов 44 в результате анализа помеховой обстановки потребовалась смена частоты, код которой был записан в первое запоминающее устройство 26. Поэтому в последующей группе импульсов 45 требуется забланкировать выход схемы компенсации через два периода 21 на первый из периодов, в котором радиолокатор будет работать на вновь выбранной частоте (на фиг.3 первый период группы 45). При этом импульс 37, обнуляющий первое запоминающее устройство 26 и разрешающий смену частоты, приводит в исходное состояние формирователь бланкирующих импульсов 19, который при совпадении кодов номера частоты с выходов первого запоминающего устройства 26 и электронного коммутатора 28 формирует импульсы 40 длительностью, равной длительности переходного процесса в схеме компенсации через два периода 21 (в рассматриваемом случае импульс 41). Под действием импульсов 40 срабатывает схема бланкирования 20 и выход радиолокатора бланкируется. Одновременно импульсами 40 счетчик импульсов 24 устанавливается в нулевое положение и в новом цикле перестройки частоты он подсчитывает очередные L периодов повторения.
В случае смены обеих выбранных ранее частот (группа 45 на фиг.3) формирователь бланкирующих импульсов 19 по описанному выше алгоритму формирует два бланкирующих импульса 42 и 43.
Если в конце очередной группы импульсов в L периодах повторения анализатор помех 2 выбирает те частоты, на которых радиолокатор работал ранее, то устройство сравнения 25 импульсы 36 или 38 не выдает и формирователь бланкирующих импульсов 19 не работает.
Для обеспечения нормальной работы радиолокатора все N гетеродинов 3 находятся в постоянно включенном состоянии, а требуемая частота выбирается селектором частоты 4. В этом случае отраженные от пассивных помех сигналы, полученные на одной и той же частоте зондирования с интервалом через два периода повторения, будут когерентны между собой и легко подавляются схемой компенсации через два периода 21. Поскольку в схеме компенсации 21 задержка сигналов осуществляется на два периода повторения, то она поочередно подавляет эхо-сигналы от пассивных помех, полученные на следующих друг за другом двух частотах зондирования и ее работа ничем не отличается от работы схемы компенсации через один период при одночастотном облучении цели.
Изучение методов и средств создания заградительных шумовых помех показывает, что в спектрах последних обычно существует несколько участков на различных частотах, в которых спектральная плотность мощности помехи ниже среднего значения на 15-20 дБ (см., например, Безмага В.М., Определение статистических характеристик активной помехи по результатам летных испытаний, "Вопросы радиоэлектроники, вып.6 (36), 1969 г.). Поэтому совмещение в заявляемом импульсном когерентном радиолокаторе адаптивной групповой перестройки несущей частоты с дополнительной перестройкой частоты внутри группы зондирующих посылок при одновременной работе аппаратуры селекции движущихся целей позволяет в условиях одновременного воздействия пассивных и заградительных шумовых помех получить характеристики обнаружения флюктуирующих целей близкие к характеристикам обнаружения нефлюктуирующей цели. При использовании вышеупомянутой дополнительной перестройки цель в процессе ее обнаружения облучается по крайней мере на двух частотах, чем обеспечивается сглаживание флюктуаций отраженных сигналов и существенно уменьшается их отрицательное влияние на характеристики обнаружения РЛС.
По сравнению с радиолокатором, рассматриваемым в качестве прототипа, и известными аналогами благодаря уменьшению флюктуационных потерь вероятность обнаружения целей заявляемым импульсным когерентным радиолокатором значительно выше при одинаковом отношении сигнал/шум. Это преимущество особенно сказывается, если в сравниваемых радиолокаторах применяются узкие диаграммы направленности антенн и высокие скорости обзора пространства, т.е. в случае, когда количество импульсов, отраженных от цели за один обзор соизмеримо с числом периодов повторения в каждом цикле групповой перестройки несущей частоты. В такой ситуации характеристики обнаружения радиолокатора, рассматриваемого в качестве прототипа, приближаются к характеристикам обнаружения при одночастотном облучении, в то время как характеристики обнаружения предлагаемого радиолокатора сравнимы с характеристиками обнаружения при многочастотном облучении. Преимущества заявляемого радиолокатора в повышении вероятности обнаружения целей по сравнению с известными РЛС в сложной помеховой обстановке реализуется в области больших вероятностей (более 0,3), свойственных современным станциям обнаружения и целеуказания (см., например, Густафсон В., Эс Б., Характеристики радиолокационных станций с изменяющейся от импульса к импульсу несущей частотой, "Зарубежная радиоэлектроника", №4, 1965 г.).
Таким образом, заявляемый импульсный когерентный радиолокатор обладает высокой помехозащищенностью по отношению к пассивным и заградительным шумовым помехам, действующим в одно и то же время, и позволяет производить в сложной помеховой обстановке обнаружение целей с высокой вероятностью.
Импульсный когерентный радиолокатор, содержащий последовательно соединенные антенну, антенный переключатель, смеситель приемника, усилитель промежуточной частоты, фазовый детектор, схему компенсации через два периода и схему бланкирования, управляющий вход которой подключен к выходу формирователя бланкирующих импульсов, N гетеродинов, выходы которых соединены со входами селектора частоты, выход которого подключен к гетеродинным входам смесителя приемника и смесителя передатчика, выход которого через усилитель мощности соединен с антенным переключателем, подключенный к одному из выходов усилителя промежуточной частоты анализатор помех, управляющий вход которого соединен с устройством управления, один из выходов которого подключен к селектору частоты, соединенный с опорным входом фазового детектора когерентный гетеродин, второй выход которого через формирователь зондирующих сигналов подключен к сигнальному входу смесителя передатчика, а также синхронизатор, выходы которого соединены с устройством управления и формирователем зондирующих сигналов, отличающийся тем, что, с целью повышения вероятности обнаружения целей в условиях воздействия комбинированных помех, в радиолокатор введены счетчик импульсов, установочный вход которого подключен к выходу формирователя бланкирующих импульсов, электронный коммутатор, выход которого соединен с устройством управления, первая и вторая схемы совпадения, первые входы которых подключены к выходу счетчика импульсов, сигнальный вход которого соединен с синхронизатором, устройство сравнения, выходы которого подключены ко вторым входам схем совпадения, первое и второе запоминающие устройства, выходы которых соединены со входами электронного коммутатора и устройства сравнения, третий вход которого подключен к первому выходу анализатора помех, причем выходы первой и второй схем совпадения соединены с установочными входами соответственно первого и второго запоминающих устройств, второй выход анализатора помех подключен к четвертому входу устройства сравнения и к информационному входу первого запоминающего устройства, третий выход анализатора помех соединен с пятым входом устройства сравнения и с информационным входом второго запоминающего устройства, а входы формирователя импульсов подключены с выходом схем совпадения, запоминающих устройств и электронного коммутатора, управляющий вход которого соединен с синхронизатором.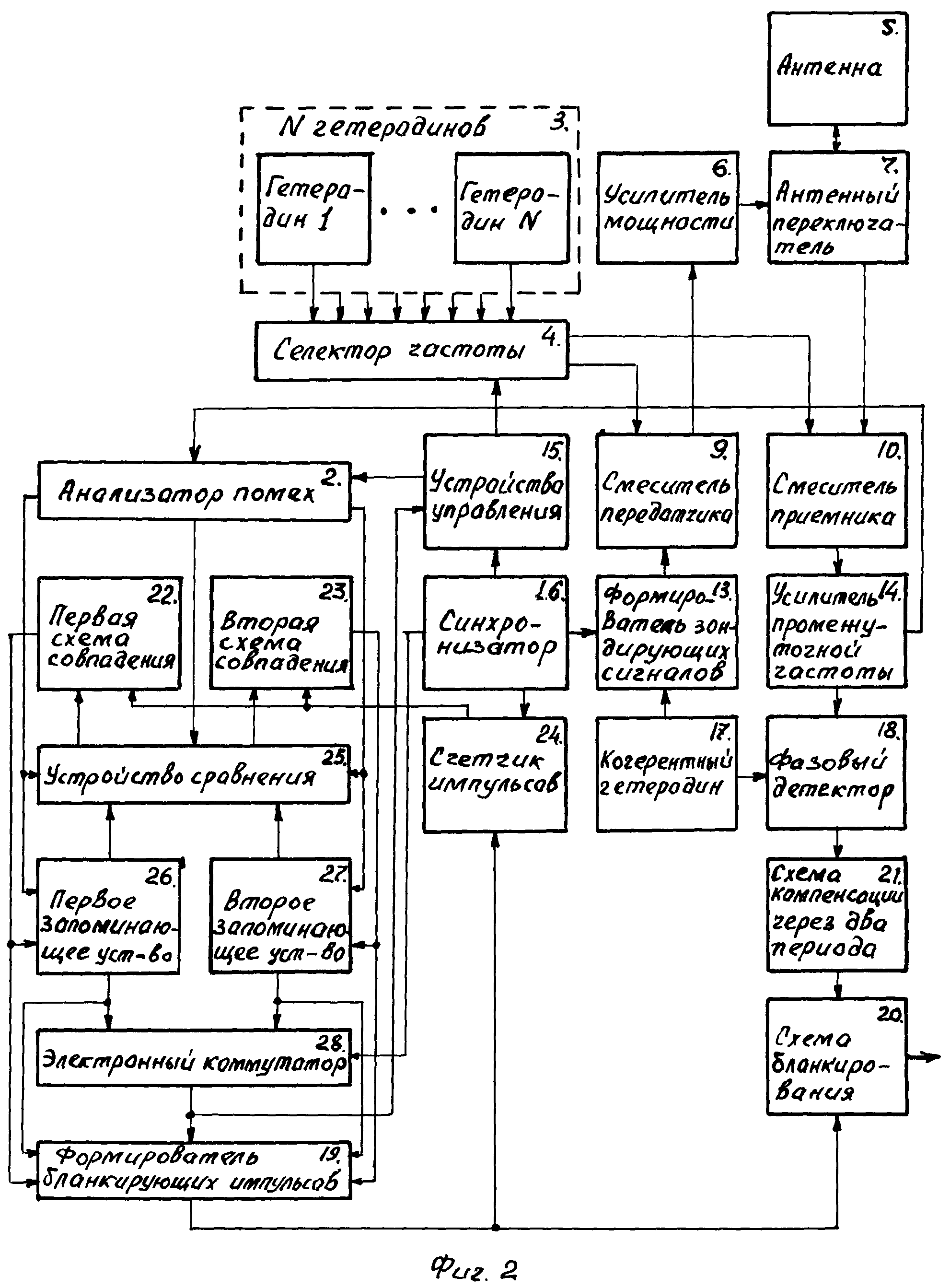
Импульсный когерентный радиолокатор
Передающий тракт радиолокатора кругового обзора
Цифровой когерентный фильтр
Устройство компенсации скорости в когерентно-импульсной радиолокационной станции
Устройство селекции движущихся целей
Устройство компенсации скорости в когерентно-импульсной радиолокационной станции

