Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АНТЕННЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области электротехники, в частности к системам автоматического регулирования и предназначено для обеспечения режима секторного сканирования антенны радиолокационной станции с высокостабильным периодом сканирования. Оно также может быть использовано в любых производственных механизмах, совершающих возвратно-поступательные, либо возвратно-поворотные движения, и к которым предъявляются прецизионные требования по стабильности периода технологического цикла.
Известна система управления движением антенны РЛС в режиме секторного сканирования. Система содержит, последовательно соединенные задатчик угла поворота антенны, датчик угла поворота антенны, фазовый детектор, пороговое устройство, второй вход которого подключен к датчику величины сектора обзора, сумматор, регулятор, исполнительный механизм на линейном асинхронном двигателе, выход которого соединен с антенной, с одним из входов датчика угла поворота антенны и с одним из входов датчика скорости вращения антенны, другой вход которого соединен с выходом датчика скорости сканирования, а выход - со вторым входом сумматора, последовательно соединенные формирователь импульсов и коммутатор, выход которого соединен со вторым входом исполнительного механизма, а вход формирователя импульсов подключен к первому входу сумматора.
Недостатком системы является нестабильность периода сканирования антенны.
Этот недостаток устранен во второй известной системе управления движением антенны РЛС. Система управления движением антенны РЛС содержит задатчик угла поворота антенны, подключенный ко входу механически связанного с исполнительным механизмом датчика угла поворота антенны, выход которого через фазовый детектор подключен к первому входу порогового блока, второй вход которого соединен с выходом датчика величины сектора обзора, а выход соединен с первым входом сумматора, второй вход которого подключен к выходу датчика скорости вращения антенны, а выход соединен со входом блока формирования команд управления, выход которого подключен к первому входу исполнительного механизма, второй вход которого через коммутатор соединен с выходом первого формирователя импульсов, а выход механически соединен с первым входом датчика скорости вращения антенны, второй вход которого подключен к выходу датчика скорости сканирования. Система содержит также второй формирователь импульсов, временной селектор, делитель частоты и блок синхронизации, вход которого так же как и вход второго формирователя импульсов подключен к выходу порогового блока, а выход подключен ко входу делителя частоты, выход которого соединен с первым входом временного селектора, второй вход которого соединен с выходом второго формирователя импульсов, а выход соединен со входом первого формирователя импульсов.
Эта система наиболее близка по технической сущности к предложенному решению и выбрана авторами за прототип.
Очевидно, что период сканирования Tск антенны, необходимый для вычисления параметров цели, можно определить по формуле
Tск=tраб.1+tрев.1+tраб.2+tрев.2, где
tраб.1, (tраб.2) - время движения антенны в рабочем секторе
tрев.1 (tрев.2) - время реверсирования антенны на границах рабочего сектора сканирования.
Как видно из формулы, стабильность периода сканирования антенны определяется стабильностью его составляющих
Tск=f(tрев.1, tрев.2, tраб.1, tраб.2)
Для того чтобы период сканирования антенны РЛС засинхронизировать синхронизирующими импульсами, поступающими от РЛС, необходимо выполнить условие:
Период следования синхронизирующих импульсов Tсинхр. не зависит от условий работы системы управления движением антенны РЛС и является стабильным.
Период же сканирования Tск антенны РЛС зависит от многих факторов, основными из которых являются, например, изменение напряжений питания системы, изменение нагрузки во времени на электропривод (особенно для открытых антенн) и др.
Таким образом, в процессе эксплуатации системы управления движением антенны РЛС возможны следующие случаи:
a) 
б)
Оба эти случая приводят к выходу системы управления движением антенны РЛС из синхронизма.
Повторное вхождение системы в синхронизм при случайных сбоях синхронизации произойдет по истечении некоторого времени, определяемого несколькими десятками периодов сканирования. Если период сканирования Tск≅1÷2 сек, то время повторного вхождения системы в синхронизм при случайных сбоях синхронизации может составлять несколько десятков секунд.
Таким образом, относительно большое время повторного вхождения системы в синхронизм при сбоях синхронизации является недостатком системы.
Целью настоящего изобретения является уменьшение времени повторного вхождения системы управления движением антенны РЛС в синхронизм при сбоях синхронизации.
Поставленная цель достигается тем, что в систему управления движением антенны РЛС, содержащую задатчик угла поворота антенны, подключенный ко входу механически связанного с исполнительным механизмом датчика угла поворота антенны, выход которого через фазовый детектор подключен к первому входу порогового блока, второй вход которого соединен с выходом датчика величины сектора обзора, а выход соединен с первым входом сумматора, второй вход которого подключен к выходу датчика скорости вращения антенны, а выход соединен со входом блока формирования команд управления, выход которого подключен к первому входу исполнительного механизма, второй вход которого через коммутатор соединен с выходом первого формирователя импульсов, а выход механически соединен с первым входом датчика скорости вращения антенны, второй вход которого подключен к выходу датчика скорости сканирования, блок синхронизации, первый вход которого так же, как и вход второго формирователя импульсов, подключен к выходу порогового блока, а выход подключен к первому входу делителя частоты, ко второму входу которого подключен генератор тактовых импульсов РЛС, выход делителя частоты соединен с первым входом временного селектора, второй вход которого соединен с выходом второго формирователя импульсов, а выход соединен со входом первого формирователя импульсов, введены последовательно соединенные третий формирователь импульсов и генератор пилообразного напряжения, выход которого через третий формирователь импульсов соединен со вторым входом блока синхронизации, а вход подключен к выходу временного селектора.
Так как при сбое синхронизации сигналы на обоих входах временного селектора не совпадают во времени и, следовательно, на его выходе импульсы отсутствуют, то сигнал с генератора пилообразного напряжения через третий формирователь импульсов поступает на блок синхронизации, выводя его из самоблокировки.
При первом же изменении полярности выходного сигнала с порогового блока система управления движением антенны РЛС автоматически втягивается в синхронизм.
Таким образом, время повторного вхождения системы в синхронизм становится меньше половины периода сканирования антенны  .
.
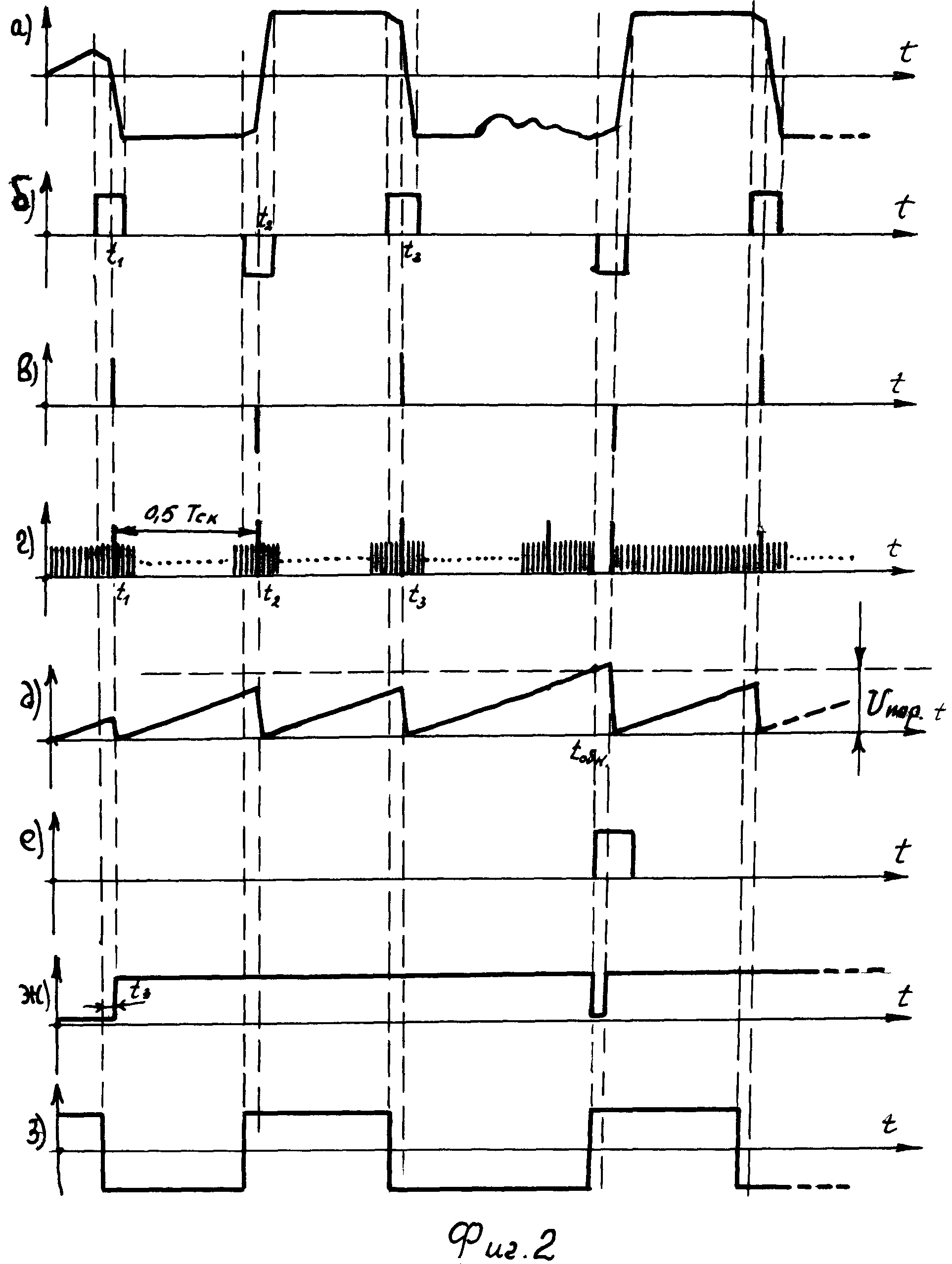
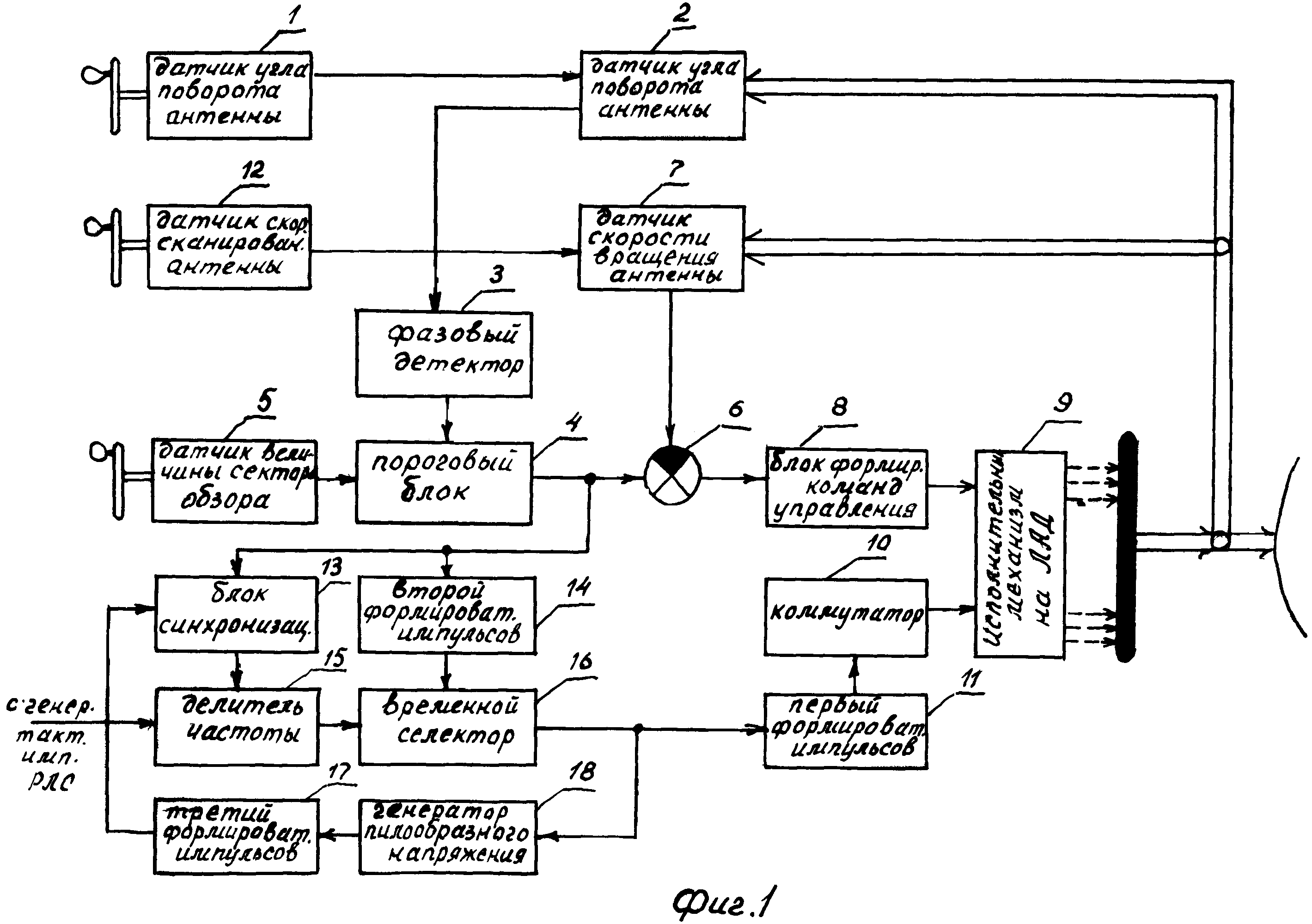
На фиг.1 приведена блок-схема предлагаемой системы управления движением антенны РЛС в режиме секторного сканирования, на фиг.2 приведены эпюры напряжений, иллюстрирующие работу системы.
Блок-схема системы, приведенная на фиг.1, содержит задатчик угла поворота антенны 1, подключенный ко входу механически связанного с исполнительным механизмом датчика угла поворота антенны 2, выход которого через фазовый детектор 3 подключен к первому входу порогового блока 4, второй вход которого соединен с выходом датчика величины сектора обзора 5, а выход соединен с первым входом сумматора 6, второй вход которого подключен к выходу датчика скорости вращения антенны 7, а выход соединен со входом блока формирования команд управления 8, выход которого подключен к первому входу исполнительного механизма 9, второй вход которого через коммутатор 10 соединен с выходом первого формирователя импульсов 11, а выход механически соединен с первым входом датчика скорости вращения антенны 7, второй вход которого подключен к выходу датчика скорости сканирования 12, блок синхронизации 13, первый вход которого так же, как и вход второго формирователя 14, подключен к выходу порогового блока 4, а выход подключен к первому входу делителя частоты 15, ко второму входу которого подключен генератор тактовых импульсов РЛС, выход делителя частоты 15 соединен с первым входом временного селектора 16, второй вход которого соединен с выходом второго формирователя импульсов 14, а выход соединен со входом первого формирователя импульсов 11.
Кроме того, система дополнительно содержит третий формирователь импульсов 17 и генератор пилообразного напряжения 18, выход которого через третий формирователь импульсов 17 соединен со вторым входом блока синхронизации 13, а вход подключен к выходу временного селектора 16.
Система работает следующим образом.
На вход системы (см. фиг.1) датчиками задаются параметры движения антенны.
Поворотом задатчика угла поворота антенны 1, в качестве которого используется синусно-косинусный вращающийся трансформатор (СКВТ), задается пеленг, относительно которого антенна должна совершать сканирование.
Синусная и косинусная составляющие заданного угла с обмоток задатчика угла поворота антенны 1 поступают на запитку статорных обмоток СКВТ - датчика угла поворота антенны 2, с роторной обмотки которого напряжения, пропорциональное разности заданного и истинного углов поворота антенны, подается на вход фазового детектора 3. Положительное, либо отрицательное напряжение, в зависимости от знака рассогласования между истинным и заданным значениями угла поворота антенны, поступает на вход порогового блока 4, который устанавливается в одно из двух возможных положений в соответствии с полярностью сигнала на входе. Выходное напряжение порогового блока 4 может быть двухполярным (см. фиг.2, 3). Оно задает направление вращения антенны в одну, либо в другую сторону от заданного пеленга и подается на первый вход сумматора 6, входы блока синхронизации 13 и второго формирователя импульсов 14. На второй вход сумматора 6 поступает разность напряжений между напряжением, пропорциональным заданной скорости в секторе сканирования (с датчика скорости сканирования 12) и напряжением, пропорциональным действительной скорости антенны (с датчика скорости вращения антенны 7). С выхода сумматора 6 напряжение ошибки подается на вход блока формирования команд управления 3 исполнительного механизма 9 на линейном асинхронном двигателе для усиления и преобразования его до величины мощности, достаточной для запитки основных индикаторов линейного асинхронного двигателя. В зависимости от знака на входе блок формирования команд управления 8 вырабатывает на выходе трехфазное напряжение с прямым, либо обратным чередованием фаз, благодаря чему основные индуктора создают бегущее магнитное поле одного, либо другого направления, которое, воздействуя на подвижную часть антенны, вращает ее в одну, либо в другую сторону. Однако мощность основных индукторов исполнительного механизма 9 не достаточна для обеспечения быстрого изменения направления вращения (реверса) антенны. Сигналы с выхода порогового блока 4 одновременно с подачей их на первый вход сумматора 6 подаются на вход второго формирователя импульсов 14, на выходе которого формируются импульсы соответствующей полярности (см. фиг.2, б), разрешающие через временной селектор 16 работу форсирующих индукторов исполнительного механизма 9 на границе рабочего сектора. Однако разнополярные импульсы на выходе временного селектора 16 (см. фиг.2, в) включающие форсирующие индуктора исполнительного механизма 9 для быстрого реверса антенны, на границах рабочего сектора появляются только в моменты совпадения импульсов во времени на обоих входах временного селектора 16 сигналов с второго формирователя импульсов 14 (см. фиг.2, б) и генератора тактовых импульсов РЛС, поступающих на второй вход временного селектора 16 через делитель частоты 15 (см. фиг.2, г моменты времени t1, t2, …).
Делитель частоты 15 преобразует сигналы генератора тактовых импульсов РЛС, имеющего высокую частоту (порядка нескольких тысяч герц), в сигнал частотой, равной заданной частоте сканирования антенны.
Период следования синхронизирующих импульсов на выходе делителя частоты 15 незначительно превышает полпериода сканирования антенны (без синхронизации). Поэтому естественное вхождение системы в синхронизм занимает длительное время (порядка нескольких десятков периодов сканирования антенны). Для быстрого первоначального ввода системы управления движением антенны РЛС в синхронизм предназначен блок синхронизации 13.
При первом же приходе антенны на границу рабочего сектора срабатывает пороговый блок 4 и импульс с его выхода подается на вход блока синхронизации 13. Через заданное время tз, необходимое для устойчивой работы системы в режиме синхронизации, на выходе блока синхронизации 13 появляется импульс (см. фиг.2, ж), разрешающий работу делителя частоты 15. При этом блок синхронизации 13 самоблокируется. На выходе делителя частоты 15 появляется первый импульс синхронизации (см. фиг.2, г момент времени t1) и через равные промежутки времени Tсинхр.=0,5Tск - следующие импульсы синхронизации (см. фиг.2, г моменты времени t1, t2 и т.д.), включающие через временной селектор 16 форсирующие индуктора исполнительного механизма 9. При этом первый формирователь импульсов 11 при срабатывании временного селектора 16 вырабатывает импульс, длительность которого равна времени реверса системы, и подключает на это время форсирующие индуктора исполнительного механизма 9 посредством коммутатора 10 к трехфазной сети.
В зависимости от полярности поступающего на коммутатор 10 импульса, форсирующие индуктора исполнительного механизма 9 запитываются трехфазным напряжением с прямым, либо обратным чередованием фаз, что создает бегущее магнитное поле одного, либо другого направления и происходит реверсирование антенны в необходимом направлении (см. фиг.2, а, моменты времени t1, t2 и т.д.).
Так как включение форсирующих индукторов исполнительного механизма 9 происходит в строго определенные моменты времени, которые определяются моментом совпадения на входах временного селектора 16 импульсов с делителя частоты 15 и второго формирователя импульсов 14, то заданные генератором тактовых импульсов РЛС периоды сканирования антенны строго стабилизированы.
Для быстрого повторного автоматического введения системы управления движением антенны РЛС в синхронизм при случайных сбоях синхронизации (в процессе работы сбои синхронизации бывают часто), необходимо вывести блок синхронизации 13 из режима самоблокировки и обнулить делитель частоты 15, подготовив их тем самим к очередному циклу синхронизации.
Для выполнения этой задачи служит генератор пилообразного напряжения 18 и третий формирователь импульсов 17. При этом импульсы с выхода временного селектора 16 поступают на вход генератора пилообразного напряжения 18 и обрывают пилу.
При окончании импульса с временного селектора 16 генератор пилообразного напряжения 18 снова начинает формировать пилообразное напряжение (см. фиг.2, д) причем по такому закону, чтобы к появлению с временного селектора 16 следующего импульса мгновенное значение напряжения пилы не достигало заданного значения опорного напряжения Uоп (см. фиг.2, д), величина которого определяется величиной сектора сканирования и скоростью движения антенны в рабочем секторе.
При сбое синхронизации импульсы с делителя частоты 15 и второго формирователя импульсов 14 не совпадают во времени на обоих входах временного селектора 16 и, следовательно, отсутствуют на его выходе. При этом мгновенное значение напряжения пилы продолжает нарастать и в момент времени tобн.≤0,5Tск достигает значения опорного напряжения (см. фиг.2, д, момент времени tобн.). При равенстве мгновенного значения напряжения пилы и заданного опорного напряжения третий формирователь импульсов 17 вырабатывает импульс (см. фиг.2, е), который подается на блок синхронизации 13.
Длительность импульса определяется временем, необходимым для вывода блока синхронизации 13 из режима самоблокировки и для обнуления делителя частоты 15. При приходе импульса с третьего формирователя импульсов 17 блок синхронизации 13 выходит с режима самоблокировки и обнуляет делитель частоты 15, подготавливая тем самим систему к очередному циклу синхронизации.
Так как моменты вывода блока синхронизации 13 из режима самоблокировки и обнуления делителя частоты 15 определяются моментом равенства мгновенного значения напряжения пилы с генератора пилообразного напряжения 18 и порогового напряжения, то время повторного вхождения системы управления движением антенны РЛС в синхронизм при случайных сбоях синхронизации будет меньше, чем Tск/2.
Очевидно, что изобретение не ограничивается вышеописанным примером его осуществления, исходя из него, могут быть предусмотрены другие виды использования и другие варианты осуществления, не выходящие за рамки предмета изобретения. К таковым относятся системы регулирования автоматических конвейерных линий, автоматизированные системы управления АСУ и другие.
Необходимо отметить, что применение введенных узлов для уменьшения времени повторного вхождения системы в синхронизм при сбоях синхронизации возможно только для систем с безредукторным электроприводом, т.к. в них вращающий момент на подвижную часть антенны передается посредством бегущего электромагнитного поля, формируемого индукторами электропривода без механического контакта между индукторами и ротором.
Исследования и испытания макетного образца системы управления движением антенны РЛС, работающей в режиме секторного сканирования и синхронизацией периода сканирования с введенными узлами, подтвердили ее работоспособность и положительные качества.
Таким образом, применение предложенных узлов в системе позволяет значительно (на 1-2 порядка) уменьшить время повторного вхождения системы в синхронизм при сбоях синхронизации, а это время является одним из основных технических параметров системы, определяющих ее тактико-технические показатели. При этом увеличение массо-габаритных характеристик и уменьшение надежности системы в целом можно не принимать во внимание, т.к. вновь введенные узлы выполнены на нескольких микросхемах.
Устройство для управления движением антенны радиолокационной станции, содержащее последовательно соединенные задатчик величины сектора обзора, пороговый блок, сумматор, формирователь сигналов управления и исполнительный блок, последовательно соединенные делитель частоты, временной селектор, первый формирователь импульсов и коммутатор, выход которого соединен с вторым входом исполнительного блока, последовательно соединенные задатчик угла поворота антенны, датчик угла поворота антенны и фазовый детектор, выход которого соединен с вторым входом порогового блока, последовательно соединенные задатчик скорости движения антенны и датчик скорости движения антенны, выход которого соединен с вторым входом сумматора, а также синхронизатор и второй формирователь импульсов, причем выход порогового блока соединен через синхронизатор с управляющим входом делителя и через второй формирователь импульсов с вторым входом временного селектора, вторые входы датчика угла поворота антенны и датчика скорости движения антенны соединены с соответствующими выходами исполнительного блока, отличающееся тем, что, с целью уменьшения времени синхронизации при сбоях, введены генератор пилообразного напряжения и третий формирователь импульсов, причем выход временного селектора соединен через последовательно соединенные генератор пилообразного напряжения и третий формирователь импульсов с вторым входом синхронизатора.