Результат интеллектуальной деятельности: УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Вид РИД
Изобретение
Изобретение относится к области судовой радиолокационной техники, а более конкретно - является составной частью аппаратуры отображения информации на индикаторах судовых РЛС и их связи с ЦВМ.
Известно устройство формирования линии радиально-круговой развертки ИКО, вращающейся синхронно с антенной, в котором информация об угловом положении антенны передается аналоговыми сигналами (см. В.Р. Берман, В.Т. Фролкин "Генераторы магнитной развертки электронно-лучевых индикаторов", М., 1976, стр.7).
Синхронное вращение развертки с антенной получается при помощи синусно-косинусного вращающегося трансформатора (СКВТ), установленного на валу антенны, в результате модуляции амплитуды линейно-изменяющегося напряжения пилы каналов горизонтального и вертикального отклонения ИКО соответственно синусоидальной и косинусоидальной составляющими угла поворота указанного СКВТ, т.е. составляющими курсового угла антенны (КУа).
Однако в судовых РЛС для стабилизации изображения на ИКО при разворотах и рысканьях судна по курсу радиолокационное изображение привязывается обычно к неподвижной системе координат, в качестве которой чаще всего используется направление ЮГ-СЕВЕР.
В этом случае при синхронном вращении с антенной линии радиально-круговой развертки ИКО угол поворота линии развертки должен быть равен пеленгу антенны Па, т.е. сумме курсового угла антенны КУа и курса судна К (Па=КУа+К).
Для получения синусно-косинусных составляющих пеленга антенны Па, необходимых для модуляции напряжения пилы, используется обычно два СКВТ, включенных по схеме электрического дифференциала, первый СКВТ связан с валом антенны и запитывается, например, от сети U~, а второй - с валом курса судна и запитывается выходными напряжениями первого СКВТ.
В результате со второго СКВТ снимаются напряжения, пропорциональные синусной и косинусной составляющим пеленга антенны.
Поэтому в указанном выше устройстве, взятом в качестве аналога, в случае использования его в судовой РЛС необходимо сигналы, снимаемые с СКВТ, связанного с приводом вращения антенны, пропустить через СКВТ, связанный с валом курса.
Недостатком рассматриваемого устройства является необходимость в дополнительных регулировочных операциях для компенсации нестабильности характеристик синхронно-фазовых детекторов и нестабильность питающих напряжений особенно при значительных изменениях рабочей температуры.
К тому же это устройство формирует только напряжения радиально-круговой развертки и не дает возможности связи РЛС с ЦВМ в части выдачи в нее или получение из нее кодов пеленга или составляющих пеленга антенны.
Однако в настоящее время судовые РЛС все чаще стыкуются с ЦВМ: наряду с другими данными от РЛС в ЦВМ должны выдаваться коды пеленга антенны или его составляющих и наоборот - по кодам, выдаваемым из ЦВМ или кнюппеля, необходимо управлять разверткой ИКО.
Указанные недостатки устранены в устройстве, в котором информация о вращении антенны или положении о ручке кнюппеля представлена в цифровом коде (см. В.Р. Берман, В.Т. Фролкин "Генераторы магнитной развертки электронно-лучевых индикаторов", М., 1976 г., стр.10).
В данном устройстве в цифровом тракте развертки ИКО входная информация, снимаемая с датчика линейного кода антенны, обрабатывается при помощи цифровых преобразователей и умножителей и затем преобразуется цифроаналоговым преобразователем в биполярные линейно-изменяющиеся напряжения пилы, модулированные, как и в ранее рассмотренном устройстве, по закону синуса и косинуса курсового угла антенны.
Однако в связи с тем, что радиально-круговая развертка ИКО РЛС должна вращаться по закону изменения пеленга антенны, а не ее курсового угла, о чем говорилось выше при рассмотрении первого аналога, структура рассматриваемого устройства, выбранного в качестве второго аналога, должна быть частично изменена путем введения вместо датчика линейного кода двух включенных по схеме электрического дифференциала СКВТ-датчиков курсового угла антенны и курса корабля и подключенной к ним следящей системы построения пеленга антенны, на валу которой устанавливается датчик линейного кода, который в этом случае уже будет датчиком линейного кода пеленга антенны.
Следящая система содержит усилитель отработки и исполнительный электродвигатель, с валом которого через механический редуктор кроме датчика кода связан также СКВТ-приемник.
К недостаткам данного устройства относятся следующие:
1. Наличие сложного электромеханического датчика линейного кода пеленга антенны;
2. Наличие следящей системы построения пеленга антенны судовой РЛС, с валом которой связан датчик линейного кода пеленга антенны;
3. Формирование синусно-косинусных составляющих пилы развертки производится с помощью сложных цифровых преобразователей и умножителей с необходимостью применения программных устройств управления.
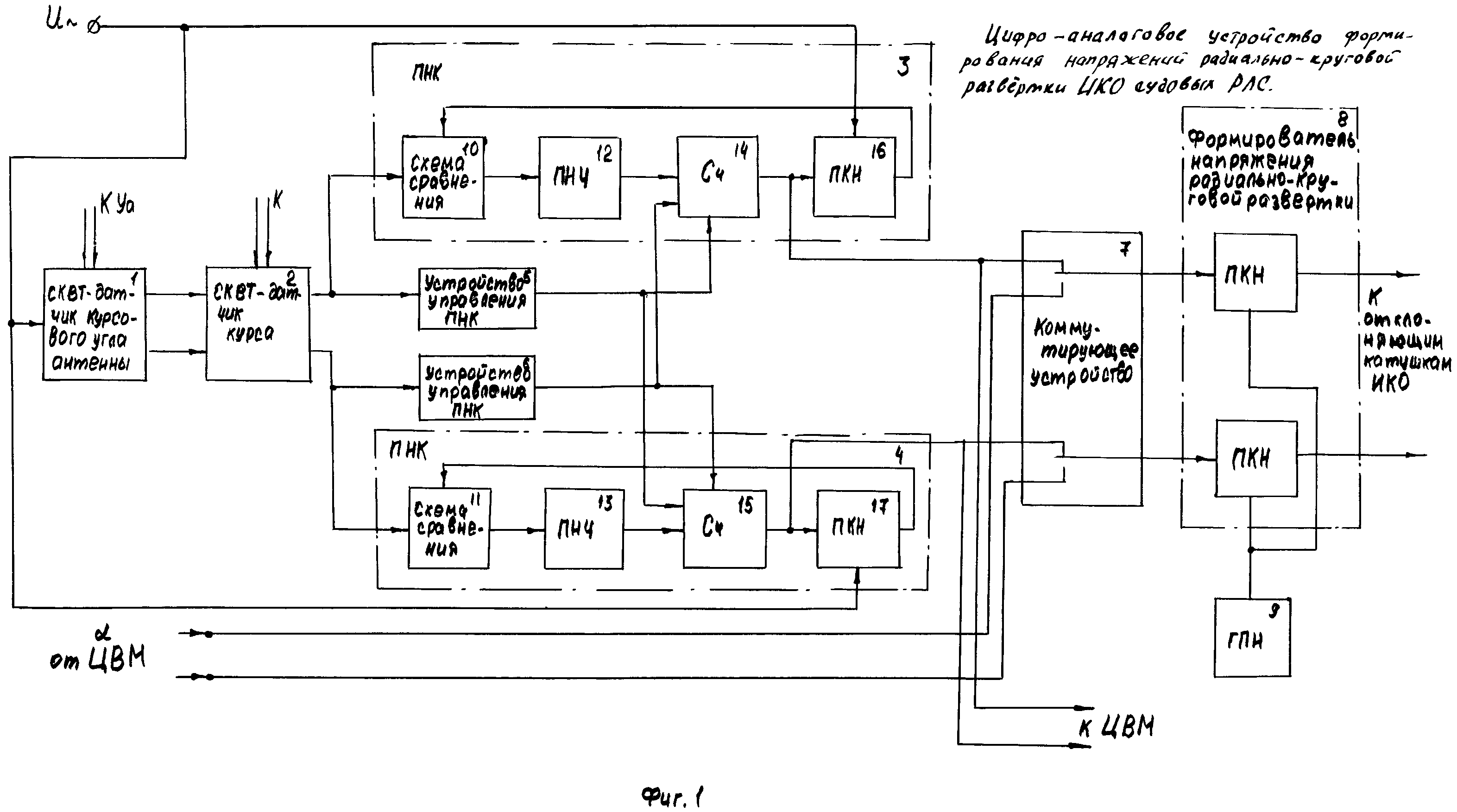
Избавиться от одного из приведенных трех недостатков, а именно - третьего, позволяет устройство, примененное в изделии "Монолит" (см. техническое описание ГК1.640.015 Т0/01). Это устройство является наиболее близким по технической сущности и выбрано в качестве прототипа. Структурная схема устройства приведена на фиг.2. В этом устройстве в качестве формирователя напряжений радиально-круговой развертки используется синусно-косинусный вращающийся трансформатор (СКВТ-модулятор), ротор которого механически связан с валом отработки пеленга антенны, а вход подключен к генератору пилообразного напряжения ГПН. Синусно-косинусные составляющие напряжения пилы развертки снимаются с выхода СКВТ-модулятора. При этом вал отработки пеленга антенны, с которым связан ротор СКВТ-модулятора, является выходным валом следящей системы с изменяющейся структурой. Изменение структуры осуществляется путем подключения входа усилителя отработки либо к СКВТ-приемнику, подключенному к выходу последовательно соединенных СКВТ-датчиков курсового угла антенны и курса судна, и тогда следящая система работает как аналоговая следящая система, либо к формирователю сигнала рассогласования - и тогда система работает как цифровая следящая система (ЦСС).
Структура аналоговой следящей системы описана в литературе (см. В.А. Бессекерский "Динамический синтез систем автоматического регулирования", М., 1970 г., стр.143) и представляет собой следящую систему с СКВТ-приемником, вход которого подключен к выходу последовательно соединенных СКВТ-датчиков курсового утла антенны и курса судна, а выход - к усилителю отработки следящей системы. При отработке вал следящей системы, а следовательно, и роторы СКВТ-модулятора и ПВК поворачиваются на угол, равный пеленгу антенны.
Таким образом, с выхода формирователя напряжений радиально-круговой развертки снимаются напряжения пилы, промодулированные по закону синуса и косинуса пеленга антенны, что приводит к повороту линии развертки ИКО на угол, равный пеленгу антенны Па, а с выхода датчика кода выдается код в ЦВМ, равный пеленгу антенны, т.е. в данном случае следящая система кодирует пеленг антенны. Не требуется творчества для того, чтобы данная следящая система стала также и декодирующей, т.е. работала как ЦСС, для чего достаточно поставить на входе усилителя коммутирующее устройство и его первый вход подключить к выходу СКВТ-приемника следящей системы, а второй вход - к выходу формирователя сигнала рассогласования. Формирователь сигнала рассогласования состоит из сумматора и преобразователя кода рассогласования в напряжение.
Структура ЦСС также известна и описана в литературе (см. В.М. Муттер "Аналого-цифровые следящие системы", Л., 1974 г., стр.38).
Код из ЦВМ, пропорциональной углу α, поступает на один из входов сумматора формирователя сигнала рассогласования. На второй вход сумматора с выхода формирователя кода угла подается код обратной связи (код ПВК), соответствующий угловому положению выходного вала следящей системы.
При неравенстве кодов ЦВМ и ПВК на выходе сумматора вырабатывается код разности, который преобразуется при помощи ПКН в напряжение рассогласования. Усиленное усилителем отработки напряжение рассогласования будет воздействовать на двигатель до тех пор, пока его вал не повернет ротор ПВК на угол, равный α, т.е. пока выходной вал следящей системы не повернется на значение угла, заданное из ЦВМ.
На заданный угол α повернется, также и ротор СКВТ-модулятора, и на отклоняющие катушки ИКО поступят напряжения пилы, промодулированные по закону синуса и косинуса угла α.
Таким образом, линия радиально-круговой развертки ИКО займет угловое положение, равное α.
К недостаткам данного устройства относятся следующие:
1. Наличие сложного электромеханического датчика линейного кода пеленга антенны, в качестве которого используется преобразователь вал-код (ПВК);
2. Наличие трудоемкой в изготовлении электромеханической следящей системы отработки пеленга антенны судовой РЛС, с валом которой связан датчик линейного кода пеленга антенны;
3. Из-за применяемых в следящей системе контактного вращающегося трансформатора в качестве модулятора и электромеханического датчика кода максимальная скорость отработки пеленга антенны ограничена и не превышает 100°/сек, в то время как в современных судовых РЛС скорости вращения антенны составляют 360-720°/сек.
Целью настоящего изобретения является упрощение конструкции и увеличение быстродействия устройства.
Указанная цель достигается тем, что в устройство, содержащее последовательно соединенные датчик курсового угла антенны и датчик курса, в качестве которых используются, например, синусно-косинусные вращающиеся трансформаторы (СКВТ), выходы устройства к ЦВМ и от ЦВМ, коммутирующее устройство и формирователь напряжения радиально-круговой развертки, первый вход которого подключен к генератору пилоообразного напряжения (ГПН), второй вход является управляющим, а выход подключен к выходу устройства к ИКО РЛС, - введены два преобразователя напряжения в код (ПНК) и два устройства управления ПИК, при этом два выхода датчика курса подключены к соответствующим первым входам двух ПНК и к входам соответствующих схем управления ПНК, а вторые входы ПНК подключены к выходам соответствующих схем управления ПНК. Третий вход первого ПНК подключен к выходу второй схемы управления ПНК, а третий вход второго ПНК - к выходу первой схемы управления ПНК.
Выходы обоих ПНК подключены к выходу устройства к ЦВМ и к соответствующим первым двум входам коммутирующего устройства, вторые входы которого подключены к входу устройства от ЦВМ, а два выхода коммутирующего устройства - к двум управляющим входам формирователя напряжений радиально-круговой развертки.
Такое выполнение устройства позволяет исключить промежуточное преобразование напряжений, пропорциональных синусу и косинусу пеленга антенны, снимаемых с последовательно соединенных СКВТ-датчиков курсового угла антенны и курса судна, в угол поворота вала электромеханической следящей системы, что упрощает конструкцию устройства, а также увеличивает его быстродействие за счет преобразования этих синусно-косинусных напряжений непосредственно в соответствующие коды, которые поступают на выход устройства и через коммутирующее устройство подаются на управляющие входы цифроаналогового формирователя напряжений радиально-круговой развертки.
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема предлагаемого устройства, а на фиг.2 - структурная схема устройства-прототипа.
Предлагаемое устройство (фиг.1) состоит из последовательно соединенных СКВТ-датчиков курсового угла антенны 1 и курса судна 2, двух преобразователей напряжение-код (ПНК) синусной и косинусной составляющих пеленга антенны 3, 4, двух схем управления ПНК 5, 6, коммутирующего устройства 7, формирователя напряжений радиально-круговой развертки 8, генератора пилообразного напряжения (ГПН) 9, выходов к ЦВМ и входов от ЦВМ.
ПНК синусной и косинусной составляющих пеленга антенны 3, 4 одинаковы и представляют собой следящие преобразователи напряжения в код, состоящие из последовательно соединенных схемы сравнения 10, 11, преобразователя напряжения в частоту (ПНЧ) 12, 13, счетчика 14, 15 и преобразователя код-напряжение (ПКН) 16, 17.
Первый вход схемы сравнения 10, 11 подключен к выходу СКВТ-датчика курса 2, второй вход - к выходу ПКН 16, 17, а выход схемы сравнения 10, 11 - ко входу ПНЧ 12, 13, выход которого соединен со входом счетчика 14, 15. Выходы счетчиков 14, 15 соединены с первыми входами коммутирующего устройства 7 и с выходом устройства к ЦВМ. Вторые входы коммутирующего устройства 7 соединены с входами устройства от ЦВМ.
Формирователь напряжений радиально-круговой развертки 8 состоит из двух преобразователей кода в напряжение, первые входы которых подключены к выходу коммутирующего устройства 7, вторые входы - к генератору пилообразного напряжения 9, а выходы формирователя 8 через выходы устройства - к отклоняющим катушкам индикатора ИКО.
Напряжения с синусной и косинусной обмоток СКВТ-датчика курса 2, пропорциональные соответственно синусу и косинусу пеленга антенны, поступают на первые входы схем сравнения 10, 11 ПНК 3, 4. На вторые входы схем сравнения поступают напряжения с выходов ПКН 16, 17 тех же ПНК.
При неравенстве напряжений на первом и втором входах схем сравнения 10, 11 на их выходе вырабатываются напряжения разности, которые преобразуются при помощи преобразователей напряжение-частота 12, 13 в последовательности импульсов, частота следования которых зависят от величины напряжений разности. Последовательности импульсов преобразуются в счетчиках 14, 15 в параллельные коды, которые соответствуют синусу и косинусу пеленга антенны.
Эти коды поступают:
- на преобразователи код-напряжение 16, 17 для преобразования их в напряжения, пропорциональные синусу и косинусу пеленга антенны, и последующего сравнения этих напряжений с напряжениями, также пропорциональными синусу и косинусу пеленга антенны, но поступающими с СКВТ-датчика курса 2;
- на выход устройства к ЦВМ;
- через коммутирующее устройство 7 на соответствующие первые входы формирователя напряжений радиально-круговой развертки 8.
В формирователе напряжений радиально-круговой развертки 8 пилообразное напряжение, поступающее с ГПН 9, модулируется по закону синуса и косинуса пеленга антенны.
Промодулированные пилообразные напряжения поступают на выход устройства к отклоняющим катушкам ИКО. При управлении вращением развертки от ЦВМ коммутирующее устройство 7 отключает формирователь напряжения радиально-круговой развертки 8 от ПНК 3, 4 и подключают его к входу устройства от ЦВМ.
Предложение использовать схему цифроаналогового устройства формирования напряжений радиально-круговой развертки ИКО судовых РЛС, в которой вместо трудоемкой и дорогой в изготовлении электромеханической следящей системы и связанных с ее валом электромеханических, низкооборотных датчика кода и формирователя напряжений радиально-круговой развертки применены два ПНК, две схемы управления ПНК и электронный формирователь напряжений радиально-круговой развертки, выгодно отличает предлагаемое устройство от рассмотренного прототипа.
Устройство данной структуры формирует коды синуса и косинуса пеленга антенны по принципу цифрового аналога, работающего не по программе, что позволяет состыковать предлагаемое устройство с любым типом входного устройства ЦВМ.
Предлагаемое устройство позволяет эффективно решить задачу построения развертки при высоких вращениях антенны РЛС.
Так, если максимально допустимая скорость вращения антенны при работе с рассмотренным прототипом составляет 100°/сек, что определяется максимально-допустимой скоростью вращения датчика кода типа ПВК и СКВТ-модулятора в качестве формирователя напряжений радиально-круговой развертки ИКО, то при работе с предлагаемым устройством максимально допустимая скорость вращения антенны может достигать 720°/сек и выше.
Применение в предлагаемом устройстве ПНЧ, максимальная выходная частота которого равна, например, 4 кГц, позволяет строить развертку ИКО при изменении пеленга антенны РЛС со скоростью 360°/сек. Если увеличить выходную частоту ПНЧ в 2 раза (до 8 кГц), что технически несложно, то это позволит строить радиально-круговую развертку при скорости изменения пеленга антенны, равной 720°/сек.
При этом достигается значительное уменьшение веса устройства (приблизительно в 10 раз) и габаритов (приблизительно в 4 раза).
Стоимость устройства примерно в 3 раза ниже стоимости прототипа.
Устройство радиально-круговой развертки индикаторов кругового обзора судовых радиолокационных станций, содержащее последовательно соединенные датчик курсового угла антенны и датчик курса, коммутатор, формирователь напряжений радиально-круговой развертки, управляющий вход которого соединен с выходом генератора пилообразного напряжения, а первый и второй выходы соединены с соответствующими входами отклоняющей системы индикатора кругового обзора, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены два преобразователя напряжения в код, сигнальные входы которых подключены к соответствующим выходам датчика курса, а между упомянутыми выходами датчика курса и объединенными между собой первыми управляющими входами соответствующих преобразователей напряжения в код со вторыми управляющими входами других преобразователей напряжения в код включены блоки управления, при этом выходы преобразователей напряжения в код соединены с первыми входными контактами коммутатора и являются цифровыми выходами устройства, другие входные контакты коммутатора являются цифровыми входами устройства, а выходы коммутатора соединены с соответствующими входами формирователя напряжений радиально-круговой развертки, между входами и выходами которого включены преобразователи кода в напряжение, при этом объединенные между собой управляющие входы преобразователей кода в напряжение являются управляющим входом формирователя напряжений радиально-круговой развертки.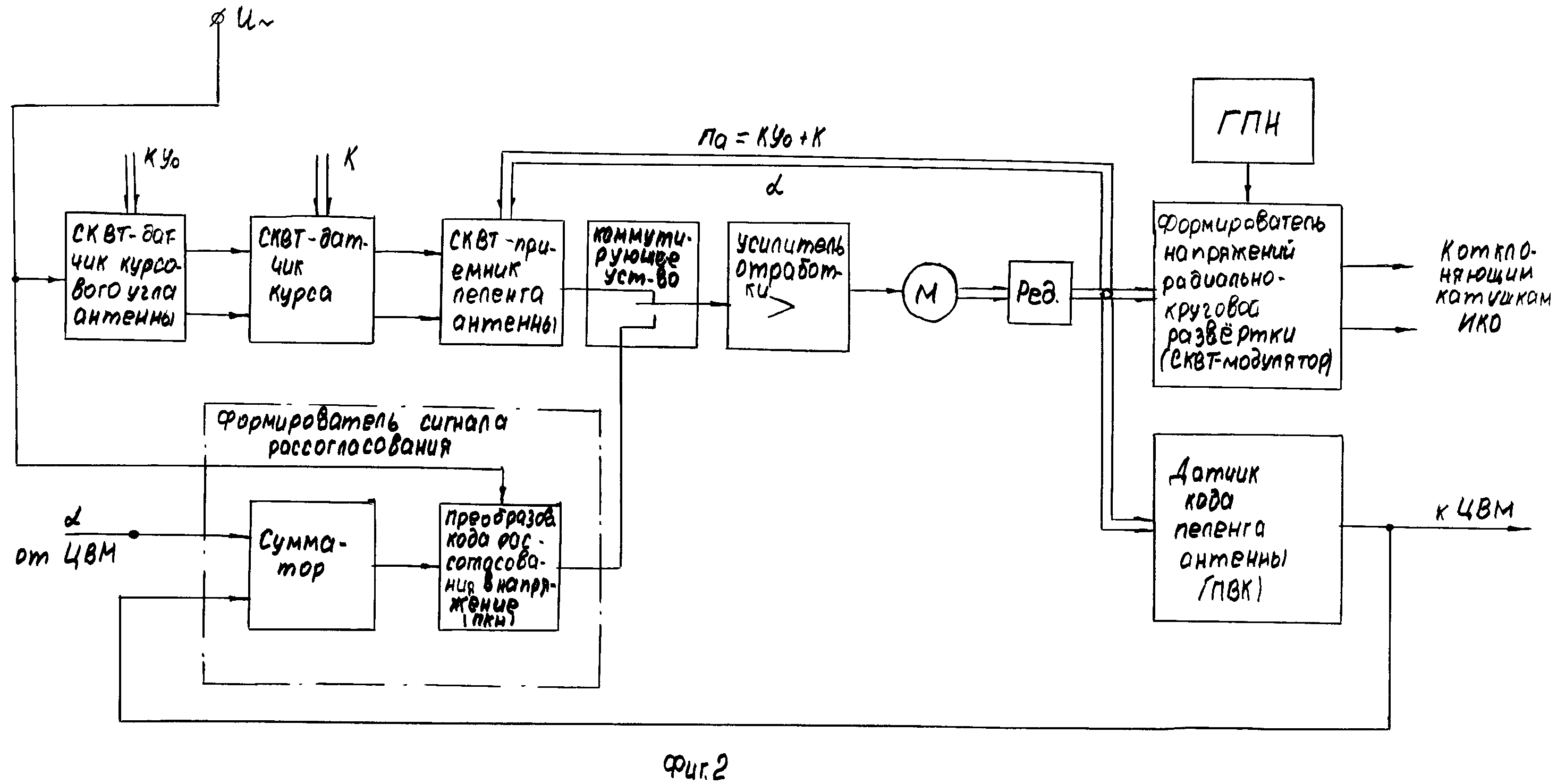
Система предупреждения столкновений

