Результат интеллектуальной деятельности: ИЗМЕРИТЕЛЬ КОЭФФИЦИЕНТА ШУМА ПРИЕМНИКА РАДИОЛОКАТОРА
Вид РИД
Изобретение
Предлагаемый измеритель коэффициента шума относится к области измерительной техники и предназначен для контроля коэффициента шума приемника радиолокатора.
Известные устройства для измерения коэффициента шума можно подразделить на модуляционные и немодуляционные в зависимости от вида используемого в процессе измерения шумового сигнала.
Модуляционные устройства (с модулированным генератором шумового сигнала) позволяют производить автоматическое измерение коэффициента шума при включенном передатчике радиолокатора и с высокой точностью, однако эти устройства находят малое применение в системах встроенного контроля из-за сложности, обусловленной большим количеством электроэлементов и специальных функциональных узлов (см. патент. США №3794999 от 26 февраля 1974 г.).
Известные немодуляционные устройства (с немодулированным генератором шумового сигнала) отличаются простотой и высокой надежностью, однако им присуща низкая точность из-за невозможности измерения коэффициента шума при включенном передатчике радиолокатора, а также большая трудоемкость процесса измерений.
Исключение составляет автоматический измеритель коэффициента шума (см. авторское свидетельство СССР № 306426 от 12.05.1970 г., G01R 27/28), обладающий высокой точностью и малой трудоемкостью процесса измерений, однако не нашедший широкого распространения в системах встроенного контроля радиолокаторов из-за сложности, обусловленной наличием большого количества специальных устройств (программный блок, селективный усилитель, частотно-зависимая обратная связь, ключевая автоматическая регулировка усиления с запоминающим элементом и др.).
Наиболее близким по технической сущности прототипом предлагаемого измерителя является немодуляционное устройство для измерения коэффициента шума, описанное в книге С.М. Латинского и др. ″Техника и практика эксплуатации радиолокационных систем″, М., изд. ″Советское радио″, 1970 г., стр. 103-106.
Это устройство содержит немодулированный генератор шума, калиброванный высокоточный аттенюатор, волноводный переключатель и стрелочный прибор. Погрешность измерений данным устройством достигает 2,5 дБ и является следствием того, что измерения производятся только при выключенном передатчике радиолокатора и фиксируемое при этом значение коэффициента шума приемника не соответствует фактическому с включенным передатчиком.
Процесс измерений с помощью указанного устройства отличается трудоемкостью, так как оператор затрачивает значительное время на отсчет показаний стрелочного прибора и калиброванного аттенюатора, а также на вычисления коэффициента шума по результатам отсчета.
Целью настоящего изобретения является обеспечение измерения коэффициента шума приемника при включенном передатчике для повышения точности измерения.
Поставленная цель достигается тем, что в измеритель коэффициента шума, содержащий немодулированный генератор шума, источник питания, измерительное устройство и устройство управления введен ключ для бланкирования зондирующего импульса передатчика радиолокатора, включенный между выходом контролируемого приемника и входом измерительного устройства. Ключ управляется формирователем, который синхронизуется импульсом запуска передатчика, вырабатываемым синхронизатором радиолокатора.
Немодулированный генератор шума подключен ко входу приемника с помощью направленного ответвителя, при этом между направленным ответвителем и немодулированным генератором шума включен установочный некалиброванный аттенюатор, предназначенный для юстировки измерителя коэффициента шума с целью повышения точности измерения.
Измерительное устройство выполнено в виде пороговой электронной схемы, состоящей из интегратора, схемы сравнения, источника опорных напряжений и индикатора, который автоматически отображает результат измерений.
Введенный ключ в сочетании с принятой схемой подключения немодулированного генератора шума позволяет производить измерение коэффициента шума при включенном передатчике радиолокатора, поскольку обеспечивается бланкирование зондирующего импульса на входе измерительного устройства и защита немодулированного генератора шума от воздействия мощного сверхвысокочастотного зондирующего импульса передатчика. Измеренное значение коэффициента шума приемника соответствует фактическому, так как учитывается его возрастание при включенном передатчике радиолокатора.
Измерительное устройство в виде пороговой электронной схемы обеспечивает уменьшение в 3 раза затрачиваемого на измерение времени по сравнению с прототипом.
Предлагаемый измеритель сочетает простоту функционального построения с высокой точностью измерения предельно допустимого значения коэффициента шума.
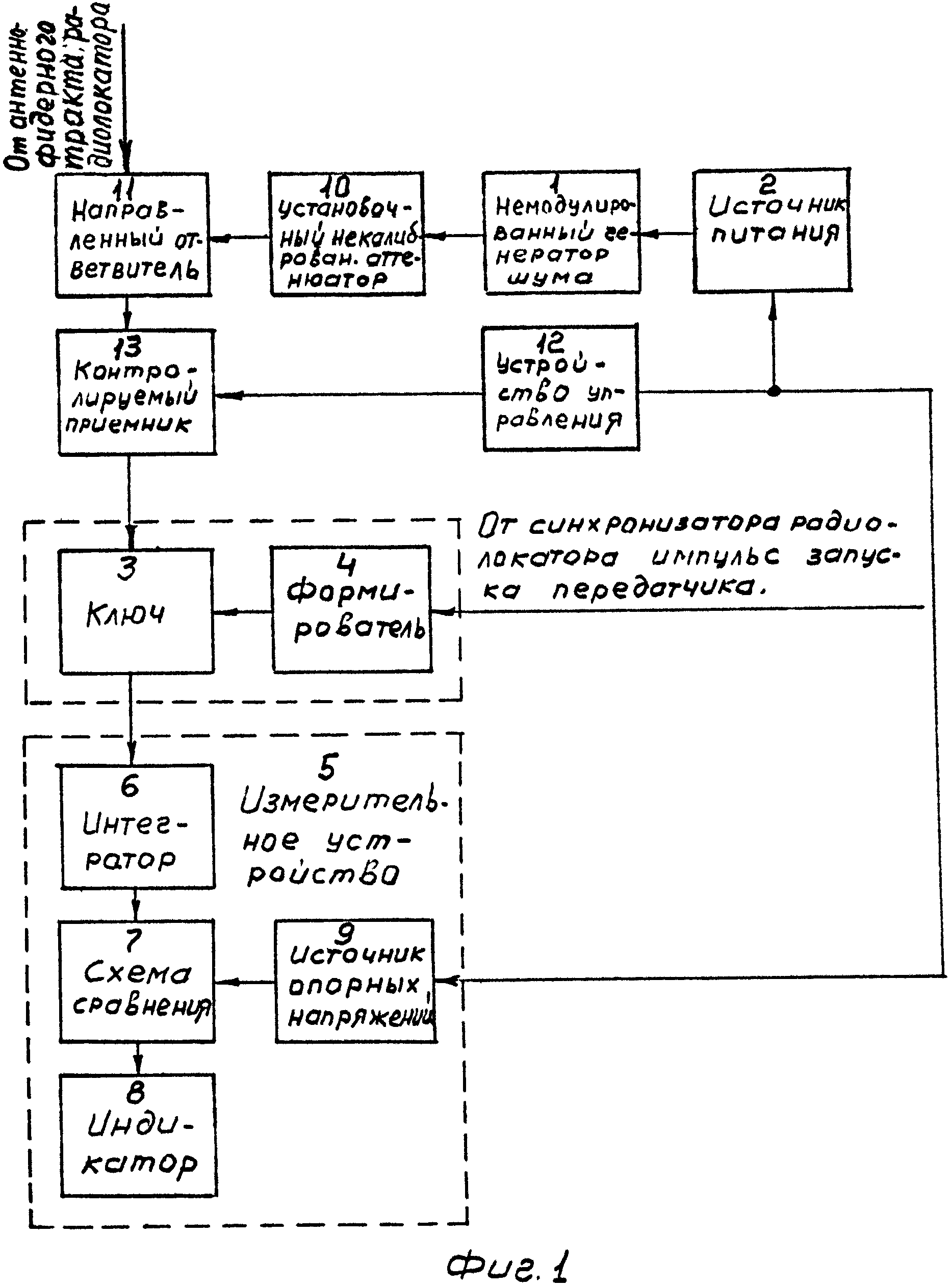
На фиг. 1 представлена блок-схема измерителя коэффициента шума.
Измеритель коэффициента шума содержит: немодулированный генератор 1 шума, источник 2 питания, ключ 3, формирователь 4, измерительное устройство 5, состоящее из интегратора 6, схемы 7 сравнения, индикатора 8, источника 9 опорных напряжений, установочный некалиброванный аттенюатор 10, направленный ответвитель 11, устройство 12 управления.
Измерение коэффициента шума с помощью предлагаемого измерителя осуществляется методом двух отсчетов, который реализуется путем предварительного нормирования напряжения шумов на выходе контролируемого приемника 13 при выключенном немодулированном генераторе 1 шума и последующим допусковым измерением напряжения шумов при включенном немодулированном генераторе 1 шума. Указанные процедуры выполняются при включенном передатчике радиолокатора.
Выходное напряжение шумов Uш контролируемого приемника 13 бланкируется с помощью ключа 3, который нормально открыт и закрывается на время прохождения зондирующего сигнала импульсом формирователя 4, синхронизируемого импульсом запуска передатчика радиолокатора. В интеграторе 6 измерительного устройства 5 напряжение Uш интегрируется, затем поступает на сигнальный вход схемы 7 сравнения.
На первом этапе измерения на опорный вход схемы 7 сравнения от источника 9 опорных напряжений подается напряжение Uоп1, с которым сравнивается проинтегрированное напряжение шумов Uш.
Нормирование напряжения шумов на выходе контролируемого приемника 13 производится на первом этапе измерения путем регулировки усиления контролируемого приемника 13 с помощью устройства 12 управления до наступления равенства напряжений Uш и Uоп1, которое автоматически фиксируется индикатором 8.
После нормирования напряжения шумов одновременно включаются с помощью устройства 12 управления источник 2 питания немодулированного генератора 1 шума и опорное напряжение Uоп2 вместо Uоп1. Возросшее после включения источника 2 питания напряжение шумов Uш сравнивается с опорным напряжением Uоп2, и результат сравнения автоматически фиксируется индикатором 8.
В отдельных случаях, когда требуется повышенная точность измерения коэффициента шума, между выходом контролируемого приемника 13 и входом ключа 3 может подключаться переключаемый ослабитель, который включается с помощью устройства 12 управления одновременно с включением источника 2 питания.
Переключаемый ослабитель обеспечивает постоянство напряжения шумов на входе измерительного устройства 5 в процессе измерения, из-за чего повышается точность измерения. При этом не требуется включения опорного напряжения Uоп2, так как напряжение шумов Uш сравнивается только с одним опорным напряжением Uоп1 до и после включения немодулированного генератора 1 шума.
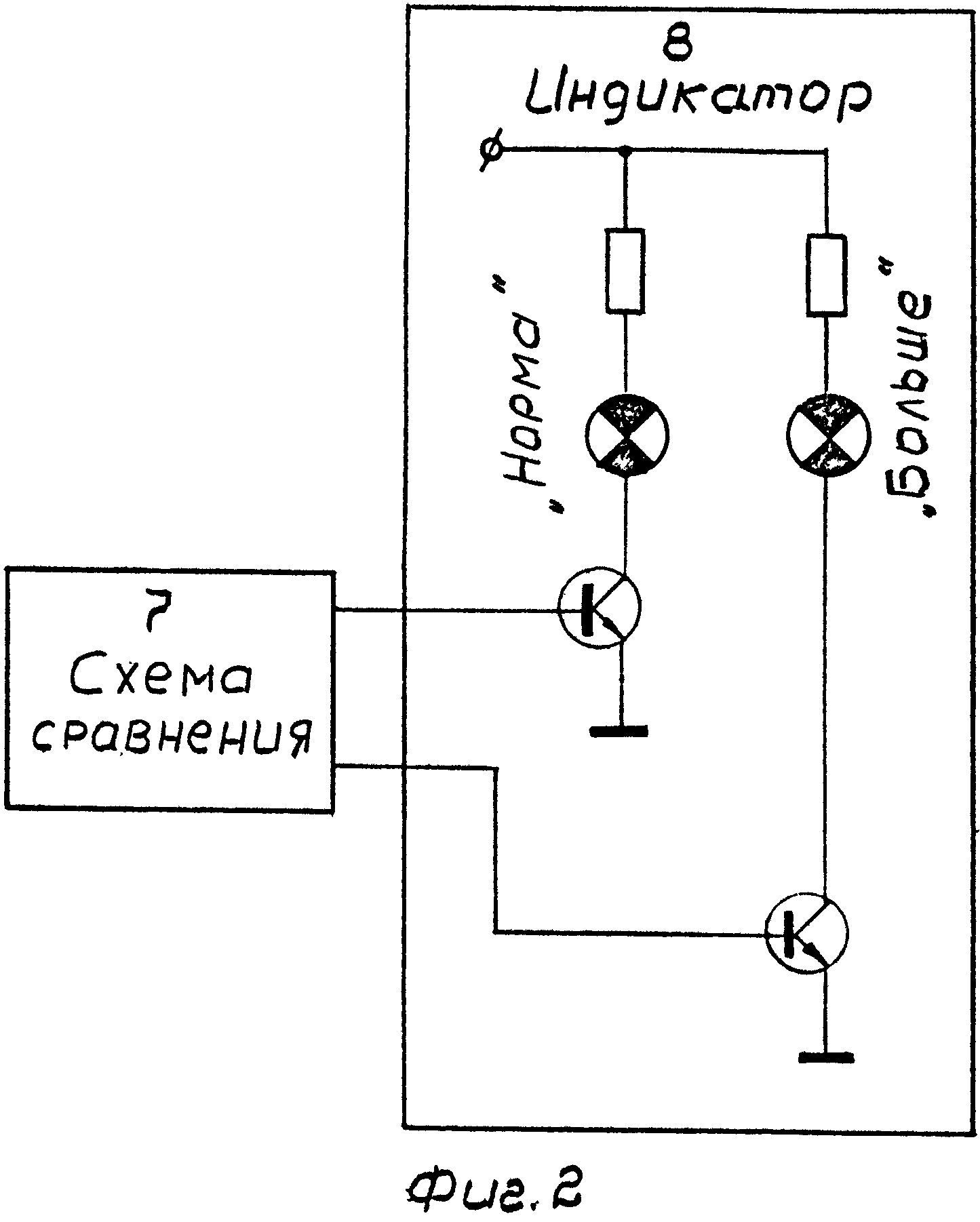
Немодулированный генератор 1 шума целесообразно выполнить на лавинопролетном диоде, а в качестве схемы 7 сравнения может быть использовано устройство автоматического контроля параметров по авторскому свидетельству СССР №475953 от 25.05.1973 г., кл. G01R 31/28. При этом индикатор 8 может быть выполнен по схеме, представленной на фиг. 2.
Равенство напряжений Uш и Uоп1 при нормировании фиксируется в таком индикаторе по поочередному промигиванию табло ″Норма″ и ″Больше″, а результат допускового измерения напряжения Uш после включения источника 2 питания фиксируется путем подсвета одного из указанных табло в зависимости от величины коэффициента шума.
Схемное исполнение остальных узлов заявляемого измерителя общеизвестно.
Сочетание в предлагаемом измерителе простоты функционального построения с высокой точностью измерений, соизмеримой с точностью модуляционных устройств, а также снижение трудоемкости процесса измерения, выгодно отличает его от указанного прототипа. Выполненный на элементах микроэлектроники в сочетании со сверхвысокочастотными элементами полоскового типа (направленный ответвитель, установочный некалиброванный аттенюатор), заявляемый измеритель обладает меньшими массогабаритными характеристиками и повышенной надежностью при соизмеримой по сравнению с прототипом стоимости.
Устройство для определения параметров модуляции импульсных линейно-частотно-модулированных и фазоманипулированных сигналов

