СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ В ПОГРУЖЕННОМ ПОЛОЖЕНИИ ОБЪЕКТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к области измерений статистических характеристик гидрофизических полей жидкости и может быть использовано в системах гидролокации для обнаружения движущихся в погруженном положении объектов, в том числе подводных диверсионных средств и сил (ПДСС), в состав которых входят боевые пловцы-диверсанты (БПД), средства их доставки, малые (МПЛ) и сверхмалые (СМПЛ) подводные лодки и другие малоразмерные тела (МРТ).
Известно несколько способов обнаружения движущихся в погруженном положении объектов (ОДПО).
Все эти способы объединяет то, что они основаны на выявлении и измерении аномальных изменений состава гидрофизических полей жидкости.
В то же время всем этим способам присущи и общие недостатки.
Основным недостатком первых двух способов является то, что они применимы к обнаружению только атомных подводных лодок, а также то, что средства обнаружения должны находиться на носителе.
Основным недостатком третьего и четвертого способов является то, что они не эффективны при возмущении свободной поверхности, обусловленном воздействием ветра, атмосферного давления и другими внешними причинами, из-за резких искажений, наблюдаемых локальных аномалий в силу их диссипации, вызванной морским волнением, а также то, что средства обнаружения должны находиться на летающем носителе.
Кроме того, недостатком четвертого способа является то, что ночью он практически не применим.
Общим недостатком всех рассматриваемых выше способов является то, что для их реализации должны быть носители аппаратуры обнаружения, например, корабль, вертолет.
Известен еще и способ ОДПО. Этот способ по своему функциональному назначению наиболее близок к предлагаемому и основан на измерении мгновенных значений гидрофизических параметров в сечениях кильватерного следа и индикации измеренных величин после накопления с последующим наблюдением структуры полученных изображений следа при одновременном фиксировании моментов измерений и определении гидрофизических параметров следа по характеристикам изображения, при котором для определения момента изменения характеристик следа перед индикацией измеренных величин последовательно фиксируют попарно их произведения для точек следа в анализируемом и центральном сечениях и производят усреднение полученных произведений для идентичных по положению в сечении точек следа для совокупности последовательно анализируемых сечений.
Данный способ имеет те же недостатки, что и описанные выше, а именно, наблюдения осуществляют с движущегося носителя в условиях слабовозмущенной свободной поверхности. Кроме того, измеряемые гидрофизические величины в плоскости, нормальной к направлению движения обнаруживаемого объекта, сильно диссипируют, а возбуждаемые движущимся в погруженном положении малоразмерным телом возмущения не всегда достигают свободной поверхности и практически не вызывают изменения статистической структуры гидрофизического поля этой поверхности, что приводит к снижению эффективности данного способа при обнаружении малоразмерных объектов типа ПДСС.
Цель данного изобретения является устранение отмеченных недостатков известных способов ОДПО и обеспечение возможности обнаружения в ограниченных акваториях (закрытые бухты, гавани, якорные стоянки внутренние и внешние рейды и другие) малоразмерных движущихся в погруженном положении объектов типа ПДСС путем измерения и обработки в подповерхностном термоклине малых изменений импульса переноса, обусловленных их движением.
Поставленная цель достигается тем, что в способе обнаружения движущегося в погруженном состоянии объекта, основанном на измерении мгновенных значений гидрологических характеристик гидрофизического поля жидкости, в качестве гидрологической характеристики используют импульс переноса, значения которого измеряют с помощью гидрофизического преобразователя, по измеренным значениям определяют энергетические спектры с заданным интервалом времени, запоминают их, затем последовательно сравнивают каждый последующий с предыдущим и далее по изменению формы и смещению частоты, полученных в результате сравнения энергетических спектров, определяют наличие локальных изменений статистической структуры гидрофизического поля жидкости в анализируемом пространстве, по которым судят о наличии локальных возмущений в указанном пространстве, затем определяют интегральные разности энергетических спектров и по результатам сравнения их плотностей распределения с оптимальными порогами, определяют вероятности правильного и ложного обнаружения движущегося в погруженном положении объекта.
Данное техническое решение соответствует критерию "существенное отличие", так как в предложенном способе ОДПО впервые ставится вопрос определения энергетических спектров состояний гидрофизических полей жидкости по измеренным значениям импульса переноса с заданным интервалом времени, дальнейшим запоминанием энергетических спектров, последовательного сравнения их между собой для определения наличия локальных изменений статистической структуры гидрофизического поля жидкости в анализируемом пространстве, определения интегральных разностей каждого последующего и предыдущего энергетических спектров, определения плотностей распределения этих разностей, сравнения их с оптимальными порогами и оценки вероятностей правильного и ложного обнаружения.
Все признаки в этом совокупности органически связаны, существенны, необходимы и достаточны для обеспечения поставленной цели - обнаружения малоразмерных движущихся в погруженном положении объектов типа ПДСС.
Все признаки в заявляемом способе порознь известны, но в заявляемой совокупности они не могут рассматриваться отдельно, так как признаки взаимно и органически связаны, взаимодействуют вместе и обнаруживают в отношениях друг с другом новое свойство - обнаруживать и оценивать параметры движения объектов типа ПДСС в условиях индустриальных помех в прибрежной зоне континентального шельфа путем измерения, регистрации и обработки малых изменений импульса переноса в жидкости, обусловленных локальными возмущениями, возбуждаемыми движущимся в погруженном положении объектом.
Подобные технические решения с заявляемой совокупностью признаков авторам и заявителю не известны и поэтому предложение обладает новизной.
Сущность изобретения поясняется чертежами, на которых изображены:
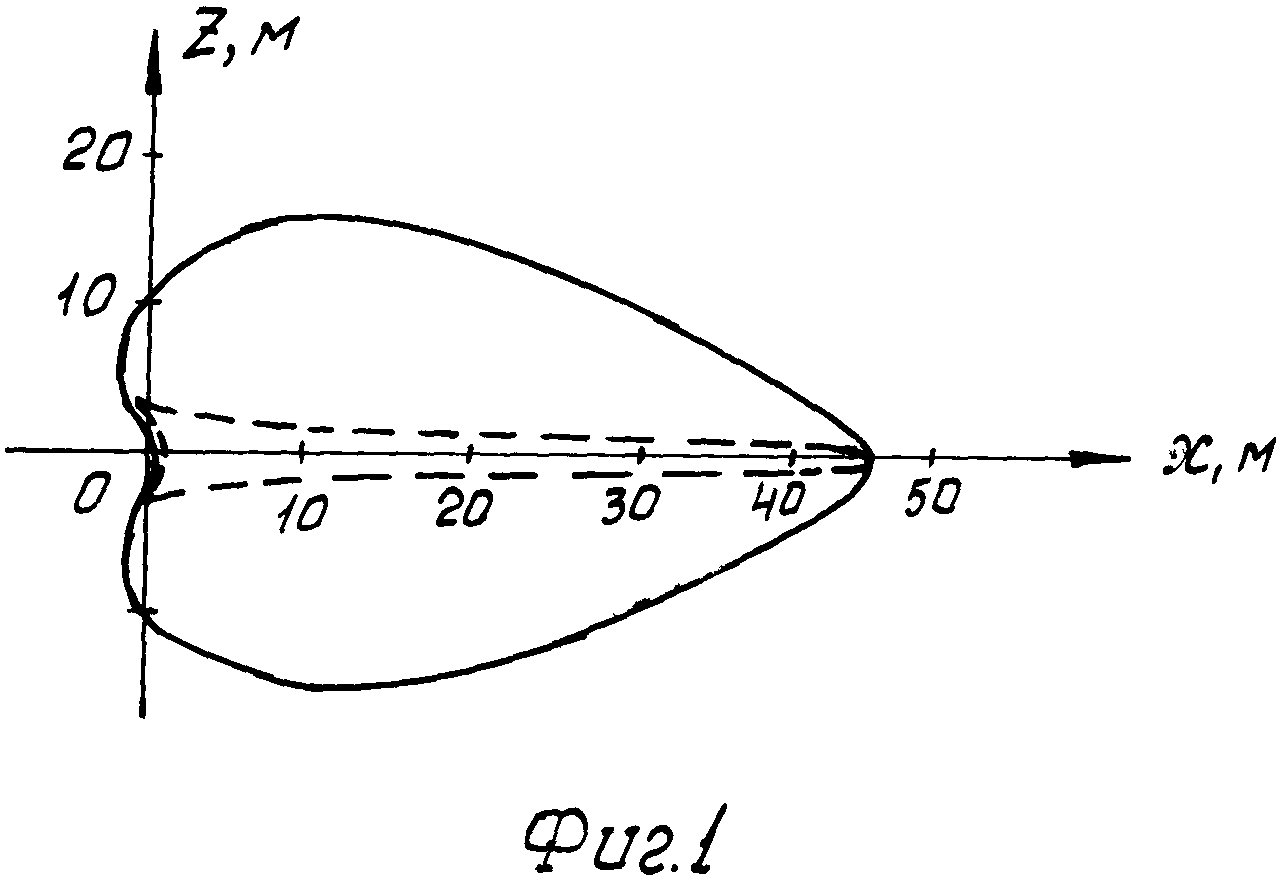
на фиг. 1 - экспериментально полученная диаграмма изменения импульса переноса;
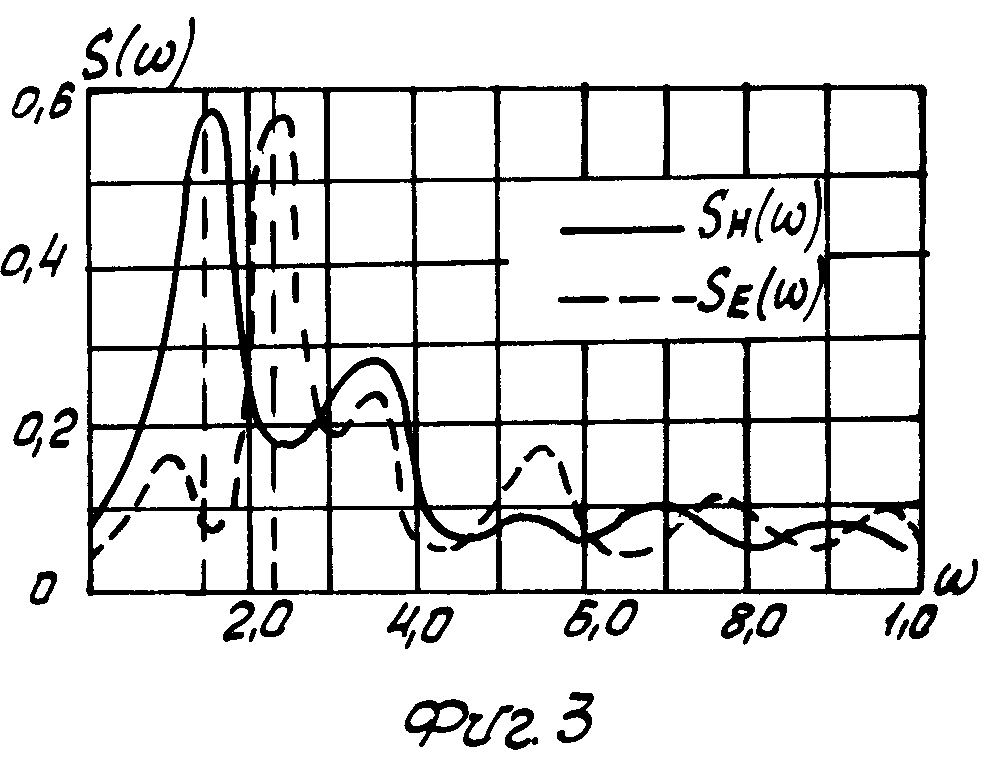
на фиг. 2 - нормированные автокорреляционные функции случайных процессов H(t) и E(t);
на фиг. 3 - энергетические спектры, соответствующие нормированным автокорреляционным функциям (фиг. 2);
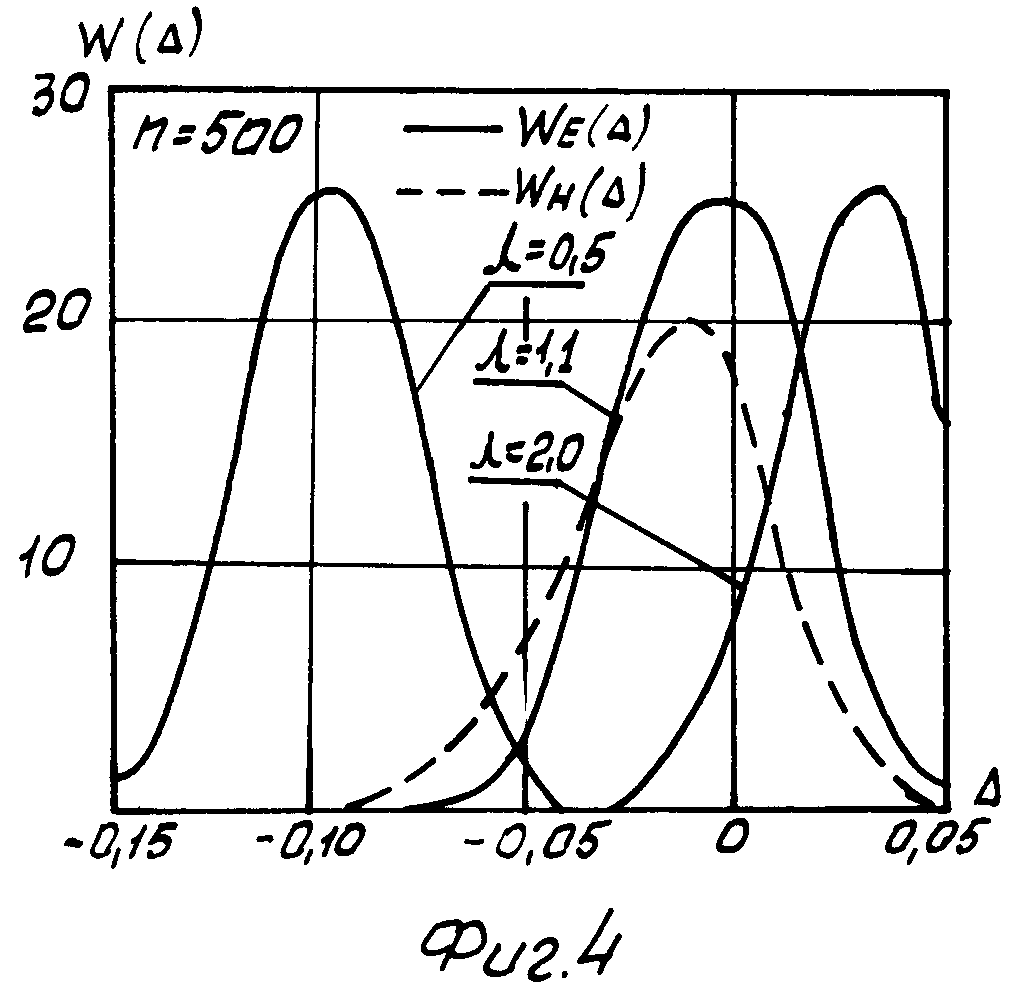
на фиг. 4 - плотности распределения W(Δ) интегральных разностей энергетических спектров случайных процессов H(t) и E(t);
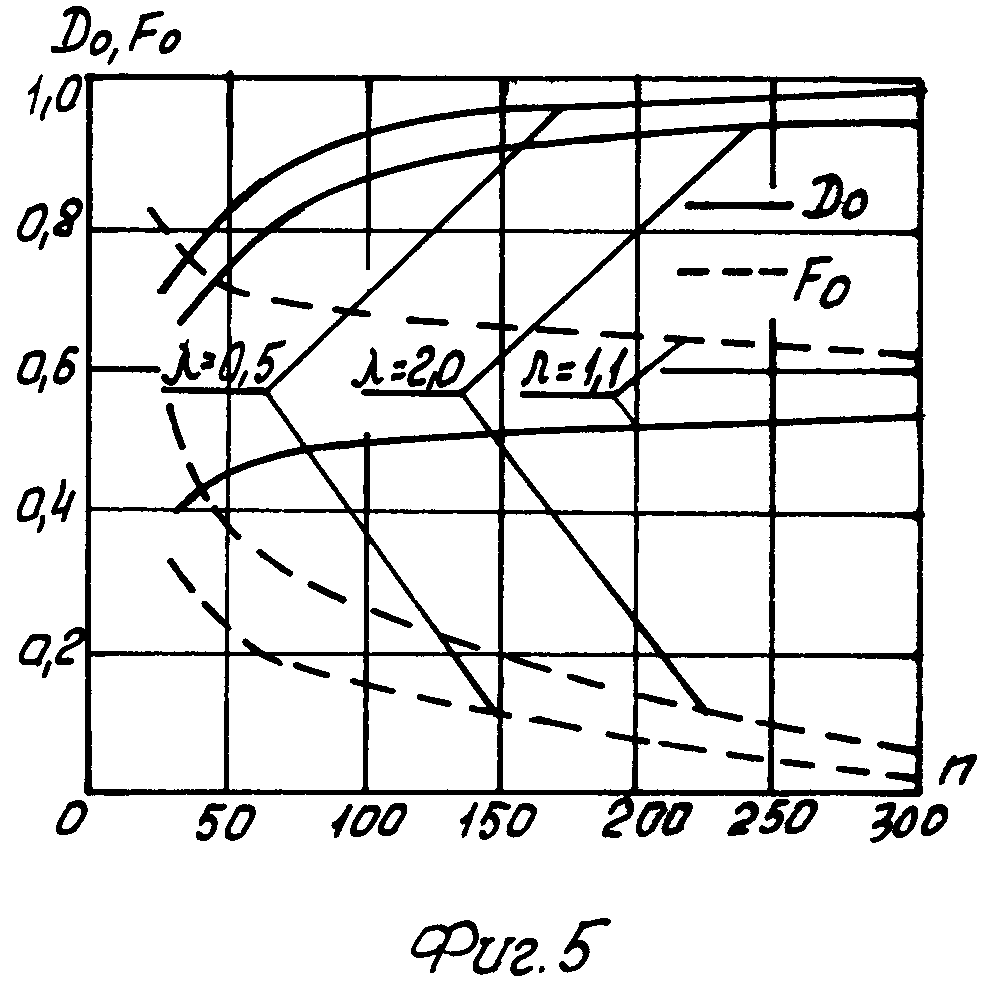
на фиг. 5 - вероятности правильного и ложного обнаружения;
на фиг. 6 - блок-схема устройства реализации предлагаемого способа.
Известно, что любое движущееся в погруженном положении тело вызывает волновые колебания окружающей его среды, скорость распространения которых в несколько десятков раз превышает скорость движения тела. Эти колебания приводят к локальным изменениям статистической структуры гидрофизического поля жидкости в некотором ограниченном объеме ΔW. Тело и жидкость представляют единую гидродинамическую систему "тело - жидкость в ограниченном объеме" (СТЖ), которую в общем случае принято считать незамкнутой, поскольку на ее гидрологические характеристики оказывают влияние океанические и приливные течения, а также другие внешние факторы. Однако рассматриваемую СТЖ можно считать квазизамкнутой, так как доля энергии движителя МРТ по сравнению с энергией обмена, течений и тому подобное в общем энергетическом балансе неограниченного объема жидкости незначительна и ею вне СТЖ можно пренебречь, поскольку вне объема ΔW энергия МРТ практически не проявляется.
Поэтому в соответствии с законом сохранения количества движения взаимодействия элементов СТЖ приводит к обмену количеством движения между ними, а также к изменению характера движения системы как целого и изменению статистической структуры гидрофизического поля жидкости в объеме ΔW, перераспределению ее гидрологических характеристик, первоначальное изменение которых в направлении движения удлиненных малоразмерных тел представляет довольно узкую область (фиг. 1 - пунктирная область); (см., например, Лаврентьев М.А., Шабат Б.В. "Проблемы гидромеханики и их математические модели, М., изд-во "Наука", 1977, стр. 32). Эта область под действием явлений переноса преобразуется в пространстве в область ΔW (фиг. 1 сплошная линия).
Поскольку из всех гидрологических характеристик механизм взаимодействия элементов рассматриваемой СТЖ наиболее полно описывается явлением переноса импульса (см. например, Дж. Дейли, Д. Харлеман. Механика жидкости, М.: "Энергия", 1971, стр. 65), то в качестве параметра ОДПО целесообразно принять параметр, характеризующий изменения импульса переноса, обусловленные локальными возмущениями, возбуждаемыми движущимися в погруженном положении объектом, тем более что объекты типа ПДСС имеют малые размеры и известно, что силы инерции уменьшаются пропорционально кубу, а силы трения - квадрату размеров, то для таких тел инерционные силы могут быть сделаны достаточно малыми по сравнению с силами вязкой природы.
Поэтому исходя из физического представления процессов взаимодействия движущегося в погруженном положении тела с жидкой средой целесообразно задачу ОДПО решать путем сравнения в объеме ΔW энергетического спектра смеси "сигнал - помеха" SE(ω) (результирующий случайный процесс E(t) взаимодействия собственных и локальных возмущений гидрофизического поля жидкости, то есть процессов H(t) и Y(t) соответственно) с энергетическим спектром помехи SH(ω) (исходный случайный процесс H(t) собственных возмущений гидрофизического поля жидкости) в данный момент времени на конечном интервале. При этом слой жидкости, в котором движется тело, будем считать однородным, а тело - источником направленных локальных возмущений.
При решении задачи ОДПО предполагается известным закон распределения случайных реализации импульса переноса. Следовательно, известны характеристики случайного процесса H(t). Процесс E(t) также случайный, поскольку является результатом взаимодействия двух случайных процессов H(t) и Y(t).
Сопоставляя характеристики исходного H(t) и результирующего E(t) случайных процессов, судят о степени их различия, а следовательно, о наличии или отсутствии дополнительных локальных возмущений. Такое сопоставление в конечном счете позволяет с определенной вероятностью обеспечить решение задачи по статистическому обнаружению движущихся в погруженном положении объектов.
Для описания частотного состава случайных процессов применяют энергетические спектры.

где τ - временной сдвиг,
ρE,H(τ) - нормированная автокорреляционная функция.
Как показали произведенные расчеты, возбуждаемые имитатором БПД с полной выкладкой локальные гидродинамические возмущения вызвали в объеме (см. фиг. 1) изменения математического ожидания и дисперсии импульса переноса на 7% и 9% соответственно. На фиг. 2 графически изображены автокорреляционные функции случайных процессов Н(t) и Е(t), а на фиг. 3 - соответствующие им энергетические спектры. Из анализа графиков фиг. 2 и фиг. 3 видно, что при указанных изменениях математического ожидания и дисперсии импульса переноса время корреляции на уровне 0,1 уменьшается, а частота энергетического спектра увеличивается приблизительно в 1,5 раза, а форма самого спектра претерпела изменения.
По величине и характеру этих изменений обнаруживают движущийся в погруженном положении объект в анализируемом пространстве и производят оценку параметров его движения, а также обнаруживают с помощью возмущений, возбуждаемых движением объекта-носителя, неподвижные препятствия и цели для ориентирования и передвижения ПДСС в режиме молчания. В первом случае осуществляется пассивная локализация, а во втором - активная, основанная на том, что возбуждаемые движением объекта-носителя возмущения первыми достигают встречные предметы, отражаются от них, возвращаются обратно и улавливаются установленными на объекте-носителе гидрофизическим преобразователем.
Для оценки вероятностных характеристик решения задачи ОДПО типа ПДСС осуществляют обнаружения случайного процесса Y(t) на фоне случайного процесса H(t). Найти процедуру оптимального обнаружения сигнала на фоне помех в явном виде для рассматриваемого случая не представляется возможным в силу того, что как обнаруженный сигнал, так и помеха, являются случайными процессами с неизвестными параметрами.
Следовательно, возникает необходимость в постановке вопроса об обнаружении сигнала в адаптивной смеси этого сигнала с помехой. В условиях такой неопределенности задачу решают путем сравнения и анализа энергетического спектра смеси "сигнал-помеха" и помехи в данный момент времени на конечном интервале.
В этом случае нельзя применять методы традиционной классической оптимальной обработки, результаты которой сравниваются с величиной оптимального порога.
В качестве величины, по которой принимают решение об обнаружении объектов типа ПДСС, берут интегральную разность Δ энергетических спектров SE(ω) и SH(ω)

При отсутствии локальных возмущений (то есть процесса Y(t) и достаточной статистики, как видно из выражения (2),  стремится к
стремится к  , а их разность Δ - к 0. Наличие дополнительных локальных возмущений приводит к изменению спектра
, что, в свою очередь, изменяет величину Δ. Следовательно, при Δ=0 в анализируемом пространстве локальные возмущения отсутствуют, а при Δ≠0 существует там же источник локальных возмущений.
, а их разность Δ - к 0. Наличие дополнительных локальных возмущений приводит к изменению спектра
, что, в свою очередь, изменяет величину Δ. Следовательно, при Δ=0 в анализируемом пространстве локальные возмущения отсутствуют, а при Δ≠0 существует там же источник локальных возмущений.
Такой подход приводит к достоверному решению задачи ОДПО. Однако наличие ограниченности существования во времени и пространстве локальных возмущений приводит к случайностям в определении энергетических спектров. Это, в свою очередь, величину Δ превращает в случайную реализацию, плотность распределения W(Δ) которой априори не известна.
Поэтому после определения по результатам измерения значений импульса переноса и формуле (1) величину SE,H(ω) определяют K значений величины Δ и плотность распределения W(Δ) этих величин, графики которых представлены на фиг. 4. Путем сравнения полученных распределений с оптимальными порогами определяют вероятность правильного Do и ложного Fo обнаружения объектов типа ПДСС как функции времени T=n·Δt. Вероятности Do и Fo графически приведены на фиг. 5.
Величина Λ (фиг. 4) представляет собой отношение частот энергетических спектров SE(ω) и SH(ω) на уровне 0,5, то есть Λ=ωE0,S/ωH0,S, и определяется мощностью источника и гидрофизическими условиями его взаимодействия с жидкой средой.
Из анализа графиков фиг. 4 видно, что при Λ→1 Δ→0 и в пределе 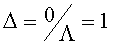 , а из анализа графиков фиг. 5 видно, что для обнаружения движущегося в погруженном положении объекта типа ПДСС с вероятностями Do=0,98 и Fo=0,09 при Λ=0,5 объем выборки должен быть n=300, а при Λ=2,0-n=500.
, а из анализа графиков фиг. 5 видно, что для обнаружения движущегося в погруженном положении объекта типа ПДСС с вероятностями Do=0,98 и Fo=0,09 при Λ=0,5 объем выборки должен быть n=300, а при Λ=2,0-n=500.
Устройство (см. фиг. 6), реализующее способ согласно настоящему изобретению, содержит один или более гидродинамических преобразователей (ГФП) 1 (см. изобретение № 1841084 от 5.01.1987 г., заявка 3162695), измеряющих малые изменения импульса переноса.
Преобразователи 1 соединены с электронным коммутатором 2, собранным, например, на ключевых схемах, служащим для съема выходного сигнала индивидуальных преобразователей 1 и обеспечивающим их последовательный опрос с заданным темпом. Электронный коммутатор 2 соединен с усилителем 3, выполненным, например, на операционном усилителе типа 140УД7, который соединен с детектором, состоящим из двух операционных усилителей, например, типа 140УД7 и 544УД1, охваченных, обратной связью и двух транзисторных ключей типа 2Т208 и 2Т315. Выход усилителя 3 соединен со входами зуммера 4, включающегося с помощью реле, например, типа РЭС-32 через коммутатор типа 521СА3, срабатывающего при превышении входным сигналом заданного уровня; индикатора характеристик цели 5, выполненного например, в виде табло со знаковой индикацией и органами управления; через измеритель интенсивности 6, собранном, например, на компараторах типа 521СА3, нагруженных на исполнительный элемент порогового устройства, например, реле типа РЭС-32, со входом устройства отображения тактической обстановки 7, выполненном на электронно-лучевой трубке (ЭЛТ), например, типа 61ЛК1Б-К, а также со входом аналого-цифрового преобразователя (АЦП) 8, собранного, например, на микросхемах типа К572, К176ЛЕ5, К1404Д7, К176ИЕ9, К176ИЕ2 и других элементах (см., например, Берлин Г.С. Механотроны, М.: "Радио и связь", стр. 140-141). На входах устройств 4, 5, 6 и 8 имеются буферные усилители, например, типа К140УД7. Один выход АЦП8 соединен с индикатором характеристик цели 5, а другой - со входом спецпроцессора 9, например, БПФ типа "Ларь", собранного на микроЭВМ серии 1810.
Выходы спецпроцессора 9 подсоединены ко входам индикатора характерных целей 5 и устройства отображения тактической обстановки 7. Зуммер 4, измеритель интенсивности сигнала 6 и устройство отображения информации 7 входят в состав блока грубой обработки сигнала 10, а индикатор характеристик цели 5, аналого-цифровой преобразователь 8 и спецпроцессор 9 - в состав блока точной обработки сигнала 11.
Устройство работает следующим образом. Сигналы с выходов преобразователей 1 через электронный коммутатор 2 подаются на усилитель 3, с выхода которого поступают на входы средств блоков грубой 10 и точной 11 обработки сигнала. Зуммер 4 обеспечивает звуковую сигнализацию при превышении сигнала хотя бы одного из преобразователей порога детектирования. Одновременно через измеритель интенсивности 6 сигнал поступает на вход устройства отображения тактической обстановки 7, где осуществляется электронное наложение на изображение тактической обстановки, формируемой спецпроцессором 9 и содержащейся в его памяти, в статике динамики процессов, происходящих в зоне действия ГФП 1. Кроме того, сигнал с выхода усилителя 3 поступает на вход индикатора характеристик цели 5 для индикации факта наличия сигнала и одновременно на вход АЦП 8, где преобразуется в цифровой код. С выхода последнего сигналы подаются на вход спецпроцессора 9, который по выборкам с заданным объемом определяет автокорреляционные функции и соответствующие им энергетические спектры, запоминает их, а затем последовательно сравнивает каждый последующий спектр с предыдущим. В случае, если частота спектра смещена, а форма претерпела изменения спецпроцессор 9 по формуле (2) определяет наперед заданное количество значений интегральных разностей энергетических спектров, плотности распределения W(Δ) этих разностей, например по формуле W(Δ)=δP(Δ)/δΔ, где δP(Δ) выражает вероятность того, что ординаты разностей лежат между Δ и Δ+δΔ (см. Современная радиолокация. Пер. с англ., под ред. Кобзарева Ю.М., М., Изд-во "Сов. радио", 1961, с. 61), сравнивает полученные плотности распределения W(Δ) с оптимальными порогами и по результатам сравнения определяет вероятности правильного Do и ложного Fo обнаружения движущегося в погруженном положении объекта. Полученные результаты расчетов с выхода спецпроцессора 9 поступают на вход индикатора характеристик цели 5, где одновременно с индикацией факта наличия сигнала и формы сравниваемой пары энергетических спектров отображаются необходимые для принятия решения параметры движения и местоположения обнаруженного объекта - например, малоразмерного объекта типа ПДСС.
Предложенный способ и средства его реализации, обеспечивая высокую эффективность обнаружения движущихся в погруженном положении объектов типа ПДСС (Do=0,98, Fo=0,09), позволяют создать зону самообороны ближайшего рубежа охраняемых объектов и резко повысить уровень предотвращенного ущерба от действий ПДСС вероятного противника.
Способ обнаружения движущегося в погруженном положении объекта, основанный на измерении мгновенных значений гидрологических характеристик гидрофизического поля жидкости, отличающийся тем, что, с целью обеспечения возможности пассивного обнаружения движущегося в погруженном положении в режиме полного молчания объекта типа подводных диверсионных средств и сил, в качестве гидрологической характеристики обнаружения используют импульс переноса, значения которого измеряют с помощью гидрофизических преобразователей, расположенных в фиксированных точках исследуемого пространства, последовательно окрашивая с заданным темпом и объемом выборки, по измеренным значениям определяют энергетические спектры и запоминают их, затем в последовательности опроса сравнивая каждый последующий энергетический спектр с предыдущим, определяют их интегральные разности, по заданному объему последних и известной методике определяют и запоминают их плотности распределения для исходного случайного процесса до появления, по крайней мере, в одной точке факта изменения формы и смещения частоты энергетического спектра, свидетельствующего о наличии в указанной точке локальных изменений статистической структуры гидрофизического поля жидкости, вызванных изменениями импульса переноса, обусловленными локальными возмущениями среды, возбуждаемыми движущимся в погруженном положении объектом, после чего с указанным заданным темпом определяют в этой точке заданное количество энергетических спектров, попарно сравнивают каждый из них с запомненным и осредненным для этой же точки энергетическим спектром и для каждой пары определяют интегральные разности, затем определяют плотности распределения их для результирующего случайного процесса, далее с помощью метода проверки статистических гипотез путем сравнения плотностей распределений интегральных разностей для исходного и результирующего случайных процессов с оптимальными порогами определяют вероятности правильного и ложного обнаружения движущихся в погруженном положении объектов.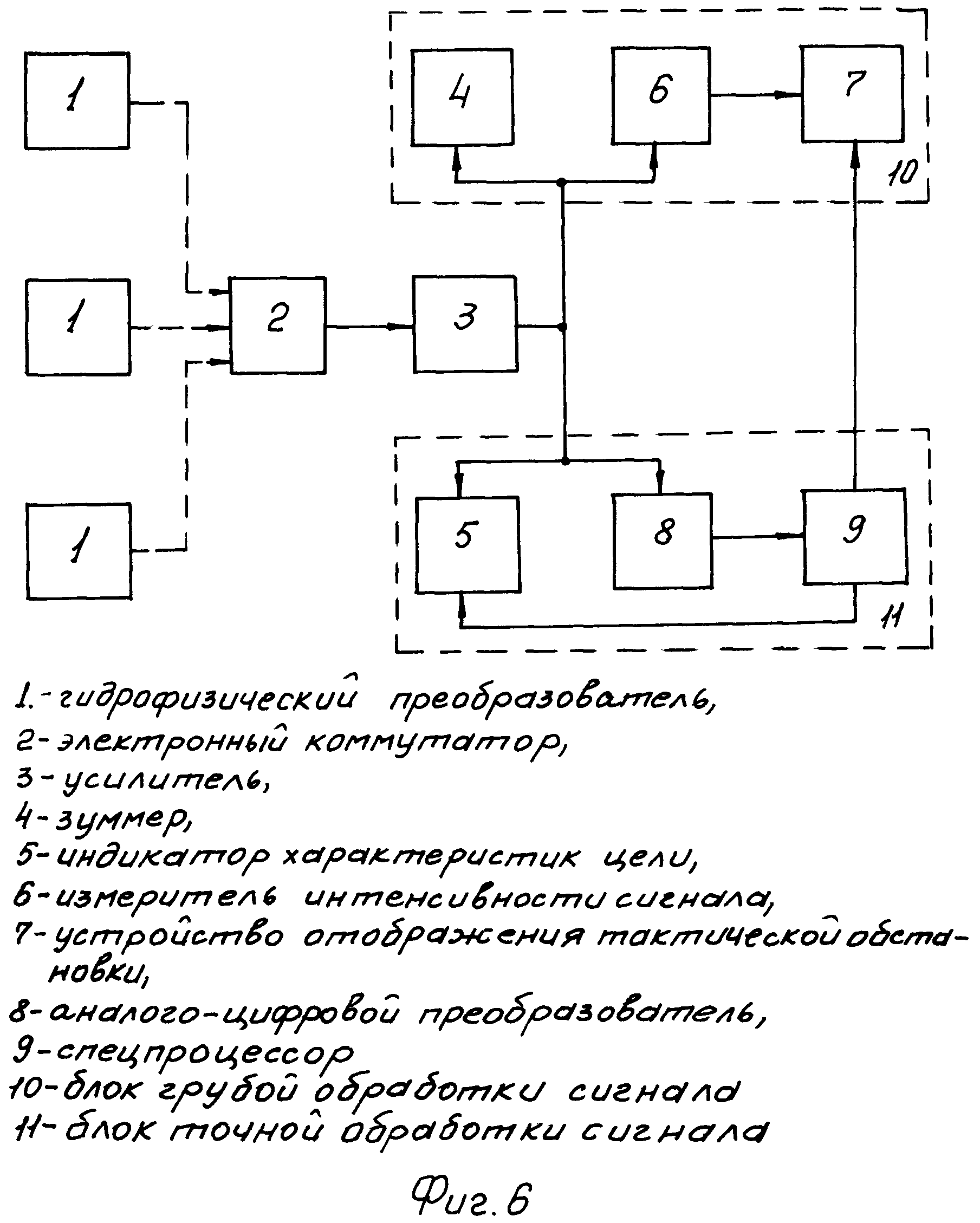
Координатор
Гидрофизическое устройство
Акустический преобразователь
Гидролокационный модуль
Обнаружитель гидролокационных сигналов
Оптико-электронная система
Гидрофизический преобразователь
Оптико-электронная система
Способ распознавания свободноплавающих малоразмерных объектов
Гидрофизическое устройство

