УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА СКАНИРУЮЩЕГО ЭЛЕМЕНТА
Вид РИД
Изобретение
Изобретение относится к области оптико-механических развертывающих устройств и может быть использовано в устройствах разложения изображения, в частности в системах тепловидения и теплопеленгации.
Сканирующие устройства в тепловидении /ТПВ/ и теплопеленгации /ТПП/ используются для перемещения изображения, сформированного оптической системой в плоскости чувствительных элементов приемника с целью разложения изображения. Наиболее широко применяются сканирующие устройства /СУ/, выполненные на базе кулачковых механизмов. Подобные устройства просты в управлении, имеют высокий коэффициент полезного действия. Основными параметрами, характеризующими СУ, являются стабильность частоты сканирования и точность измерения угла поворота сканирующего элемента /СЭ/. Повышение точности измерения угла поворота СЭ является целью настоящего изобретения.
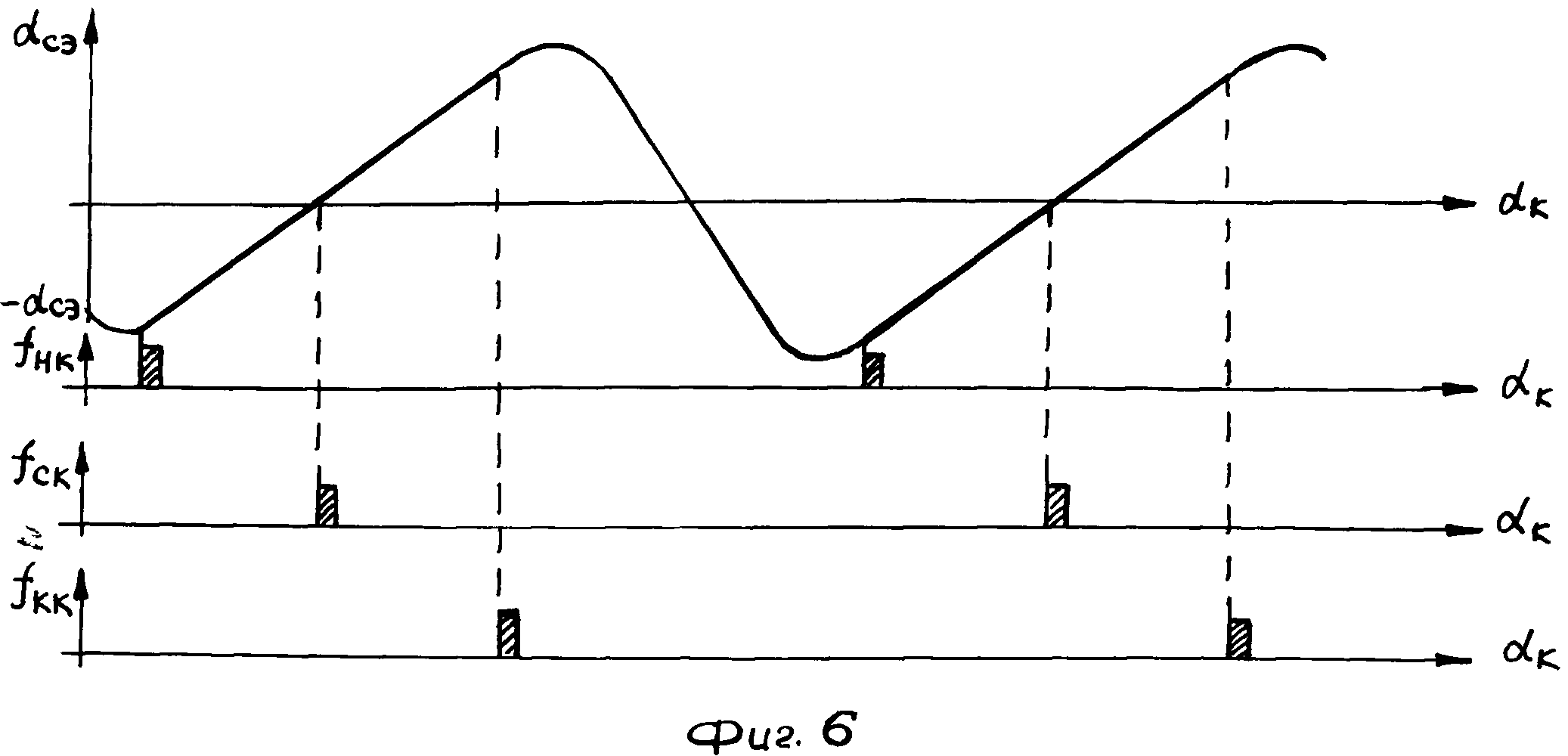
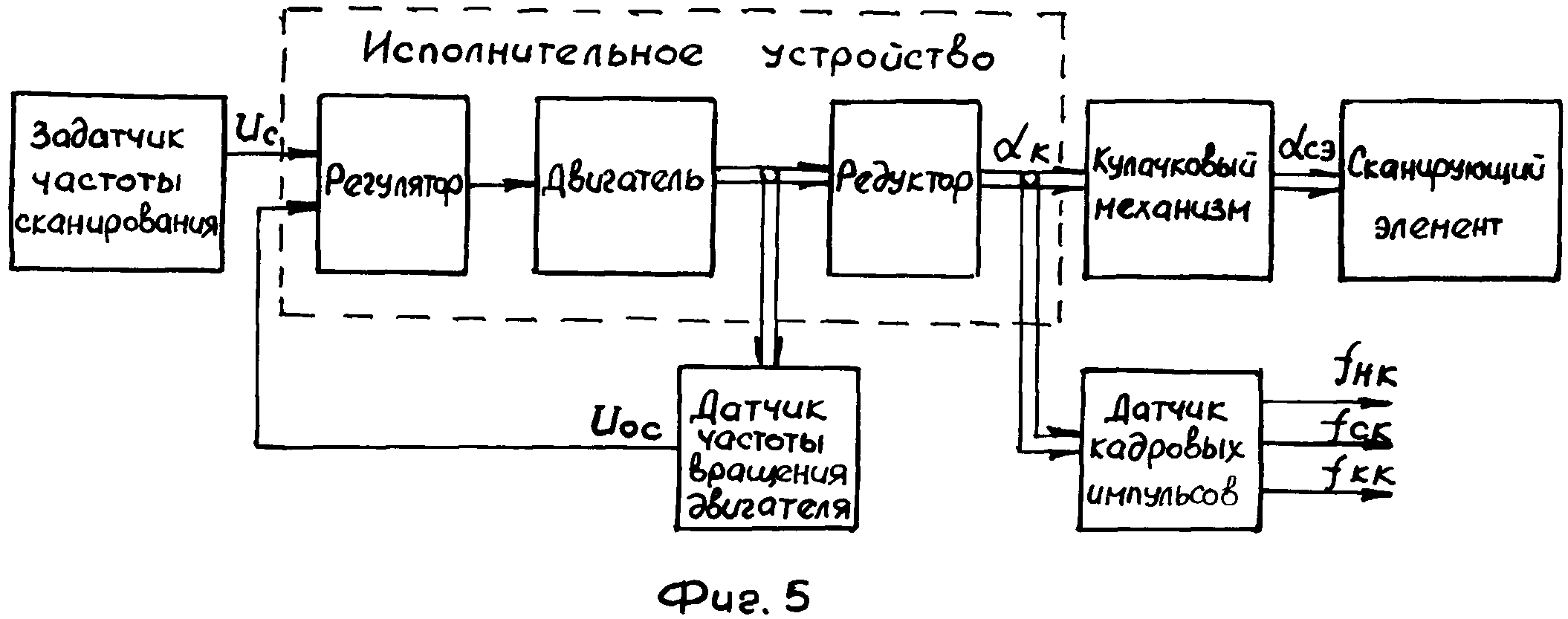
Известно СУ, включающее в себя задатчик частоты сканирования, исполнительное устройство, кулачковый механизм, сканирующий элемент, датчики кадровых импульсов и частоты вращения двигателя. Функциональная схема устройства приведена на Фиг. 5. Исполнительное устройство, включающее в себя регулятор, двигатель постоянного тока, редуктор совместно с задатчиком частоты сканирования и датчиком частоты вращения двигателя представляет собой систему стабилизации частоты вращения выходного вала исполнительного устройства, в данном случае вала кулачкового механизма. Значение частоты вращения вала кулачкового механизма и соответствующее ей значение частоты сканирования задаются величиной выходного сигнала задатчика частоты сканирования /Uс/, а сигналом главной отрицательной обратной связи служит выходной сигнал датчика частоты вращения двигателя /Uос/. Кулачковый механизм преобразует равномерное вращательное движение кулачка /αк/ в колебательное движение сканирующего элемента /αсэ/. Закон движения СЭ иллюстрируется на Фиг. 6. В качестве СЭ используется плоское зеркало. Рабочим является линейный участок закона движения. Датчик кадровых импульсов обеспечивает формирование импульсов начала кадра /fнк/, середины кадра /fск/ и конца кадра /fкк/, использующихся для синхронизации генератора кадровой развертки видеомонитора. На рабочем /линейном/ участке закона движения угол поворота СЭ пропорционален углу поворота кулачка, они связаны соотношением:

где i - редукция кулачка на линейном участке. Так как величина I - постоянная, то измеряя с помощью датчика кадровых импульсов угол поворота и масштабируя его, можно определить угол поворота сканирующего элемента. Выходным параметром СУ можно считать угол поворота кулачка, так как измерение угла поворота проводится так же, как и измерение αсэ относительно начала кадра, а относительные значения угла поворота кулачка и αсэ равны.
Недостатком приведенного устройства является низкая стабильности средней и мгновенной частоты вращения вала кулачка и соответственно стабильность частоты сканирования, вызванная переменным значением момента нагрузки на вал двигателя, а также большой погрешностью датчика частоты вращения двигателя, в качестве которого использован тахогенератор постоянного тока. Нестабильность частоты сканирования приводит, в частности, к искажению линейного участка движения сканирующего элемента и, следовательно, к нелинейным искажениям изображения. Кроме того, существенным недостатком следует признать низкую точность измерения угла поворота сканирующего элемента. Измерение угла проводится с помощью датчика кадровых импульсов, фиксирующего только три положения вала кулачка, соответственно трем положениям СЭ: началу, середине, и концу кадра.
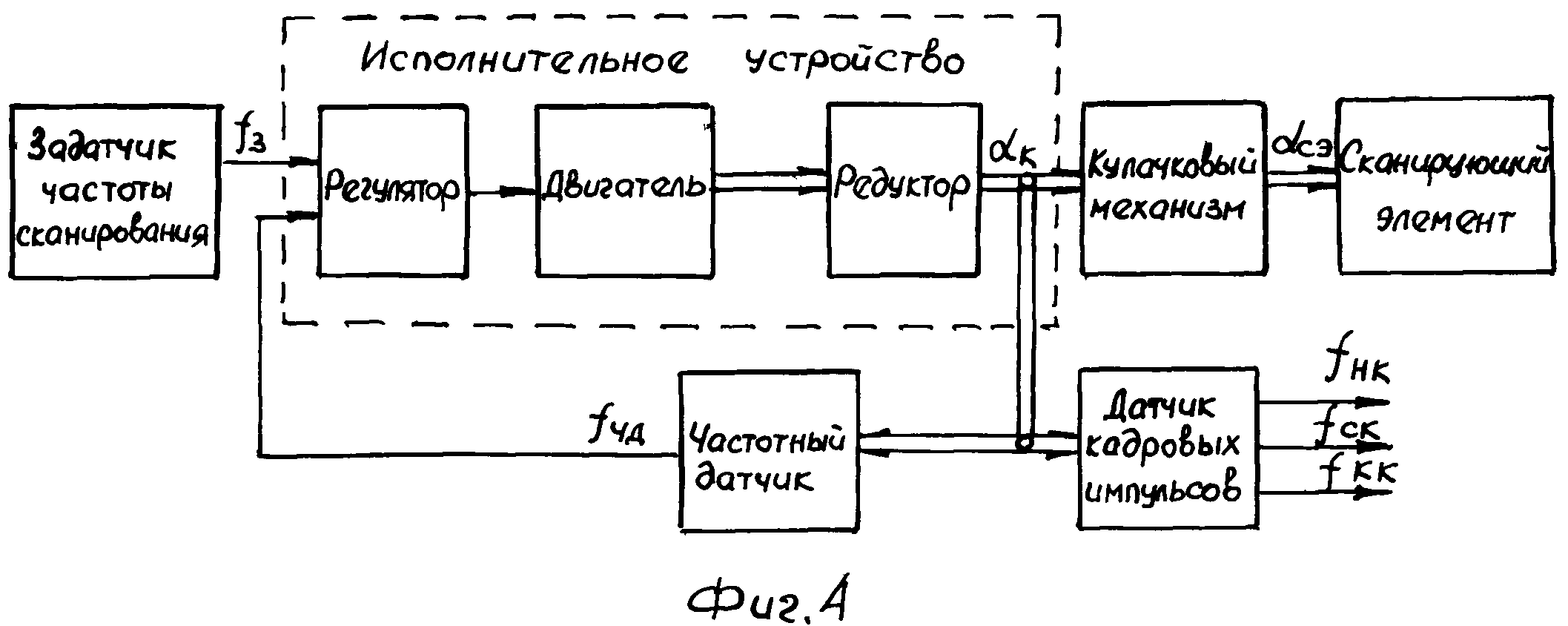
Наиболее близким по технической сущности является модернизированное сканирующее устройство и это устройство выбрано в качестве прототипа. Функциональная схема устройства изображена на Фиг. 4. Устройство включает в себя задатчик частоты сканирования, исполнительное устройство, кулачковый механизм сканирующий элемент, датчик кадровых импульсов, частотный датчик, причем выход задатчика частоты сканирования подключен к первому входу исполнительного устройства, которое своими выходами соединено с входами датчика кадровых импульсов, частотного датчика, кулачкового механизма, выход которого соединен со сканирующим элементом, а выход частотного датчика подключен ко второму входу исполнительного устройства. Задатчик частоты сканирования обеспечивает формирование импульсной последовательности fз, частота которой пропорциональна частоте сканирования. Частотный датчик формирует последовательность импульсов fчд, частота которых с высокой степенью точности соответствует частоте вращения кулачка. Кулачковый механизм преобразует линейное изменение угла поворота кулачка в заданный закон движения СЭ /Фиг. 6/. Датчик кадровых импульсов формирует импульсы начала кадра fнк, середины кадра fск, конца кадра fкк, использующиеся для синхронизации генератора кадровой развертки видеомонитора. Исполнительное устройство включает в себя регулятор, двигатель и редуктор. Совместно с задатчиком частоты сканирования и частотным датчиком исполнительное устройство образует систему стабилизации частоты вращения вала кулачка. Регулятор построен таким образом, что реализуется так называемый астатический электропривод с дискретным управлением для стабилизации частоты вращения /см. Трахтенберг P.M. "Импульсные астатические системы электропривода с дискретным управлением", М.: Энергоиздат, 1982, стр. 33 /Л1/. Сущность работы астатического электропривода заключается в том, что регулятор измеряет не разницу частот последовательностей fз и fчд, а разницу фаз, представляющую собой интеграл разности частот fз и fчд, что эквивалентно введению в контур регулирования интегратора. Следовательно, данная система обладает астатизмом первого порядка по отношению к частоте вращения кулачка, а значит, и частоте сканирования. Указанное СУ имеет повышенную стабильность средних значений частоты сканирования и позволяет получить более высокую стабильность скорости развертки на линейном участке закона движения.
Следует отметить, что имеет место нестабильность мгновенного значения частоты сканирования, обусловленная воздействием пульсирующего момента сопротивления нагрузки кулачкового механизма.
Основным недостатком данного устройства является низкая точность измерения угла поворота СЭ. Для измерения использован датчик кадровых импульсов, регистрирующий только три положения вала кулачкового механизма, соответствующие началу, середине и концу кадра, что не позволяет точно измерить промежуточные положения вала кулачкового механизма, а значит, и СЭ, поэтому не дает возможности с требуемой точностью определять координаты объектов, находящихся в поле зрения систем ТПВ и ТПП, особенно при большом поле зрения и малоразмерных объектах наблюдения. Нужно отметить, что для частичного устранения указанного недостатка используется косвенный метод, заключающиеся в измерении промежутка времени между импульсом начала кадра и импульсом перекрестья подвижного визира, совмещаемого оператором с объектом, координаты которого необходимо измерить, с последующим определением угла поворота СЭ путем умножения длительности этого интервала времени на скорость развертки на линейном участке. Однако нестабильность скорости развертки приводит к существенной погрешности измерения. Так, изменение скорости развертки на 5% при поле зрения 10° приведет к погрешности определения угла поворота сканирующего элемента /в середине линейного участка/ равной 15′, что неприемлемо для многих систем. Кроме того, в системах автоматической ТПП возможно применение другого косвенного метода определения угла поворота СЭ. Метод заключается в измерении временного интервала между импульсами начала кадра и моментов времени, когда необходимо определить угол поворота СЭ /в пределах линейной зоны движения/ с последующим умножением на скорость движения СЭ. Данный метод основан на предположении, что нестабильность скорости движения СЭ на линейном участке отсутствует, но реально существующая нестабильность мгновенной скорости приводит к существенным погрешностям в определении угла поворота.
Низкая точность в определении угла поворота приводит также к сужению области применения устройства.
Целью настоящего изобретения является повышение точности измерения угла поворота сканирующего элемента. Поставленная цель достигается тем, что в СУ, содержащее задатчик частоты сканирования, первый выход которого подключен к первому входу исполнительного устройства, которое своим выходом соединено со входами датчика кадровых импульсов, частотного датчика, кулачкового механизма, выход которого соединен со сканирующим элементом, а выход частотного датчика подключен ко второму входу исполнительного устройства, введены триггер и три счетчика, причем вход установки триггера соединен с выходом датчика кадровых импульсов и входами сброса первого, второго, и третьего счетчиков, вход сброса триггера соединен с выходом частотного датчика, счетным входом второго счетчика и входом разрешения предустановки третьего счетчика, а прямой и инверсный выходы триггера соединены соответственно с входами разрешения счета первого и второго счетчиков, выходы которых соединены со входами параллельной загрузки третьего счетчика, счетный вход которого соединен со счетным входом первого счетчика и вторым выходом задатчика частоты сканирования, а выход разрядов третьего счетчика являемся выходом устройства.
Такое построение устройства позволяет повысить точность измерения угла поворота вала кулачка и соответственно угла поворота СЭ. Так как в отличие от прототипа, где фиксируется только три положения вала кулачкового механизма, в предлагаемом устройстве измеряется точно Z положений вала кулачка, где Z - количество импульсов, снимаемых за оборот с частотного датчика. Так при применении многополюсного индукционного частотного датчика погрешность периода следования импульсов fчд не превышает 0,02% /Л1/. Так как за время, соответствующее одному периоду, угол поворота кулачка изменяется на величину  , то измеряя количество импульсов, можно измерить угол поворота кулачка с дискретностью
, то измеряя количество импульсов, можно измерить угол поворота кулачка с дискретностью  . Погрешность измерения "угловых промежутков" вала кулачка, вызванная погрешностью собственно датчика, составит при Z=180 и стабильности периода 0,02% 1,44′′. В промежутках между точно измеренными положениями вала применяется интерполяция.
. Погрешность измерения "угловых промежутков" вала кулачка, вызванная погрешностью собственно датчика, составит при Z=180 и стабильности периода 0,02% 1,44′′. В промежутках между точно измеренными положениями вала применяется интерполяция.
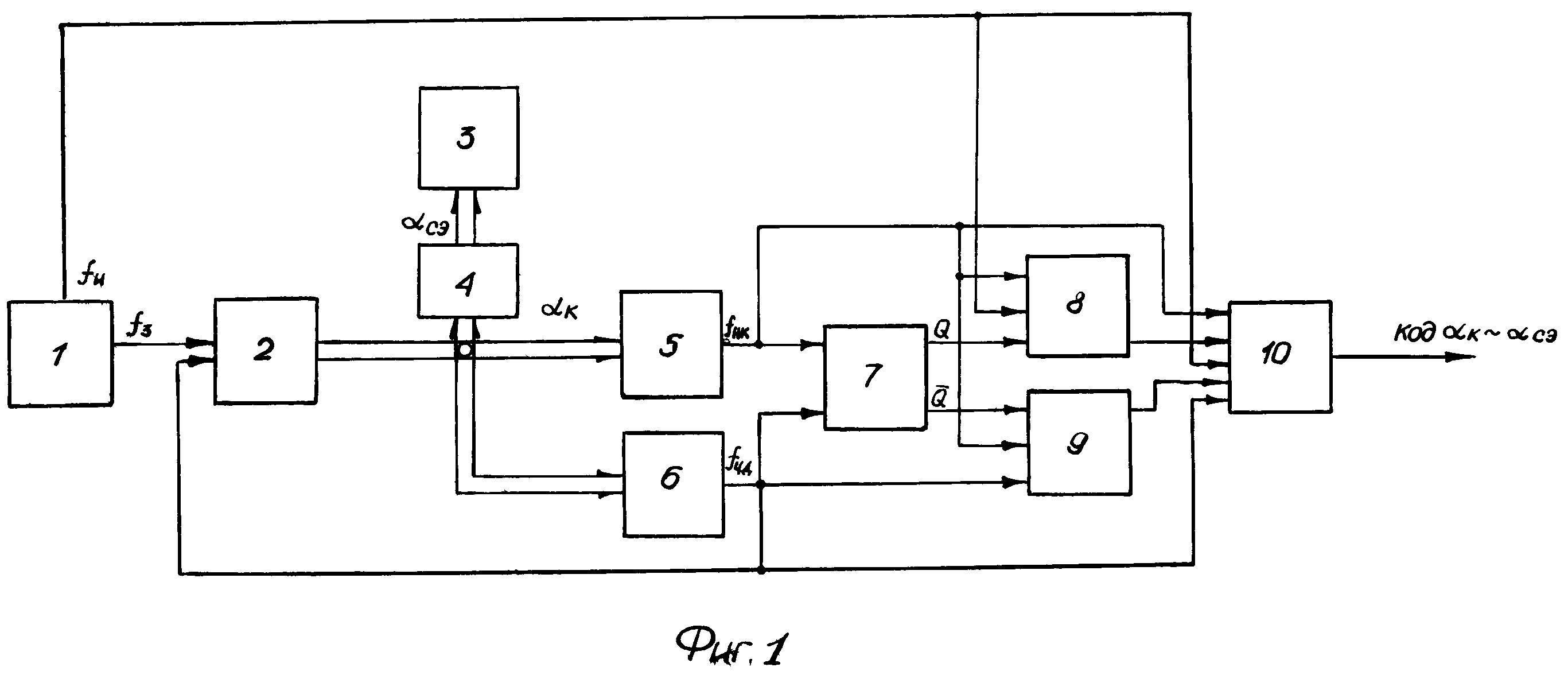
Сущность предлагаемого изобретения поясняется чертежами, где на Фиг. 1 представлена блок-схема предлагаемого сканирующего устройства, на Фиг. 2 - временные диаграммы работы СУ, на Фиг. 3 - упрощенная принципиальная схема введенных узлов для измерения угла поворота СЭ, на Фиг. 4 - блок-схема СУ, выбранного в качестве прототипа, на Фиг. 5 - блок-схема СУ-аналога, а на фиг. 6 - закон движения СЭ.
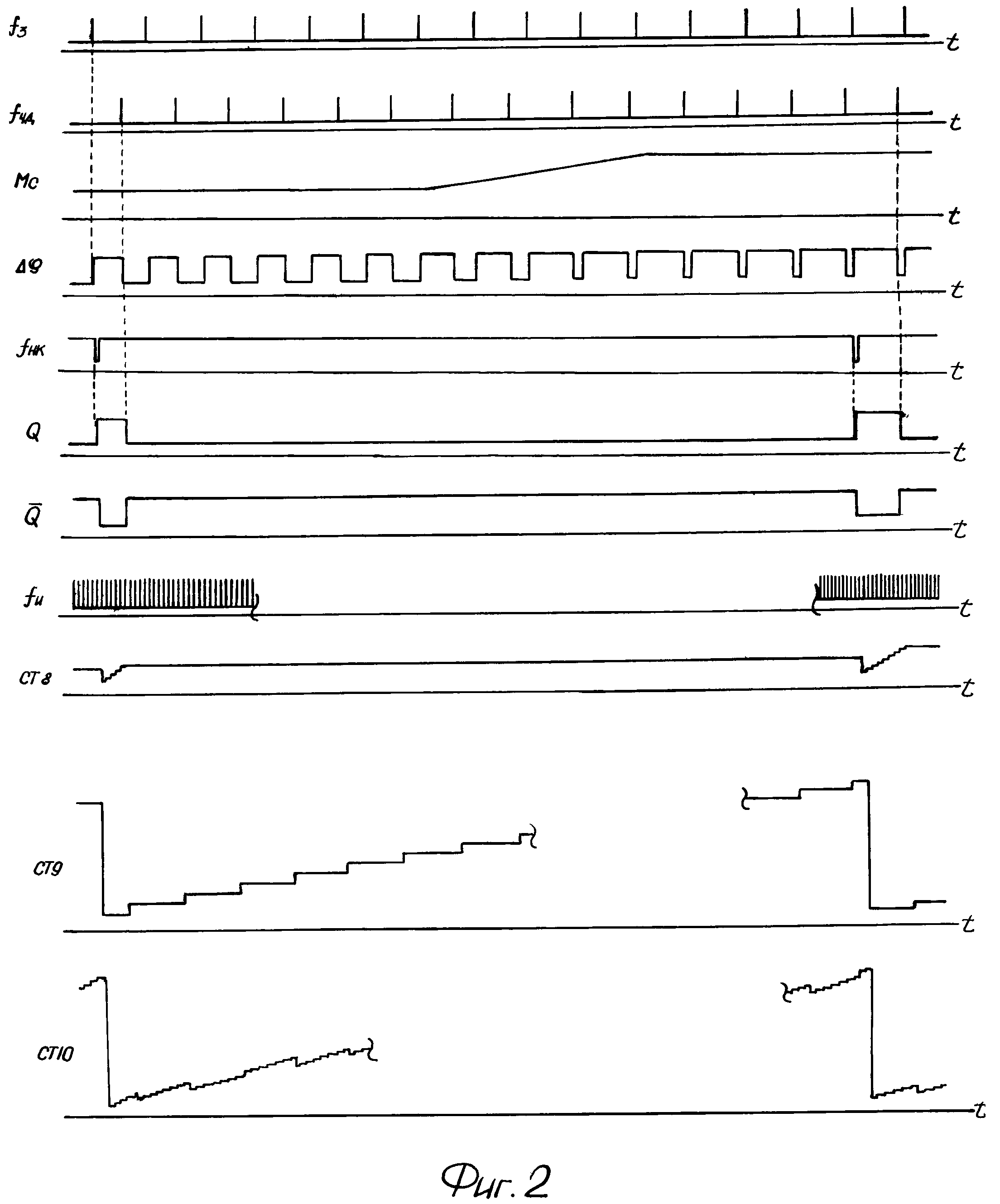
Сканирующее устройство /Фиг. 1/ содержит задатчик частоты сканирования 1, исполнительное устройство 2, сканирующий элемент 3, кулачковый механизм с кулачком 4, датчик кадровых импульсов 5, частотный датчик 6, триггер 7, счетчики 8, 9, 10. Первый выход задатчика частоты сканирования 1 подключен к первому входу исполнительного устройства 2, которое своим выходом соединено со входами датчика кадровых импульсов 5, частотного датчика 6 и кулачкового механизма 4, выход которого соединен со сканирующим элементом 3, а выход частотного датчика 6 подключен ко второму входу исполнительного устройства 2. Вход установки триггера 7 соединен с выходом датчика кадровых импульсов 5 и входами сброса первого счетчика 8, второго счетчика 9 и третьего счетчика 10, вход сброса триггера 7 соединен с выходом частотного датчика 6, счетным входом второго счетчика 9 и третьего счетчика 10, а прямой и инверсный выходы триггера 7 соединены соответственно со входами разрешения счета первого счетчика 8, второго счетчика 9. Их выходы соединены со входами параллельной загрузки третьего счетчика 10, и его счетный вход соединен со счетным входом первого счетчика 8 и вторым выходом задатчика частоты сканирования 1, а выходы разрядов третьего счетчика 10 являются выходами устройства. Задатчик частоты сканирования 1 обеспечивает формирование импульсной последовательности fз, частота которой пропорциональна требуемой частоте сканирования, и импульсной последовательности fи, используемой для интерполяции кодов, пропорциональных углу поворота СЭ. Исполнительное устройство 2 представляет собой регулятор, двигатель и редуктор. Кулачковый механизм 4 обеспечивает преобразование линейно изменяющегося угла поворота кулачка в заданный закон движения СЭ. Датчик кадровых импульсов 5 формирует импульс, передний фронт которого соответствует началу кадра. Частотный датчик 6 обеспечивает выдачу последовательности импульсов fчд, частота которых с высокой степенью стабильности соответствует частоте вращения кулачка. Триггер 7 служит для выделения промежутка времени между импульсом начала кадра и первым следующим за ним импульсом с частотного датчика, а счетчик 8 - для измерения этого промежутка. Счетчик 9 служит для подсчета количества импульсов частотного датчика. Счетчик 10 служит для формирования кода, пропорционального углу поворота кулачка 4. Импульсные последовательности fз и fчд, частоты которых пропорциональны соответственно требуемому и существующему значению частоты сканирования, поступают на первый и второй входы регулятора исполнительного устройства 2, где формируются импульсы, длительность которых пропорциональна разности фаз Δφ сравниваемых последовательностей /см. Фиг. 2/. После преобразований и усиления последовательность Δφ подается на двигатель исполнительного устройства 2, который через редуктор вращает кулачок 4 СУ с заданной частотой. При увеличении момента сопротивления нагрузки Мс на двигатель, увеличивается и Δφ, что приводит к увеличению среднего значения напряжения на двигателе и, следовательно, к возрастанию тока через двигатель. Этот процесс прекращается при равенстве момента, развиваемого двигателем и момента сопротивления.
Установившееся значение частоты сканирования будет, таким образом, соответствовать заданному. Таким образом, исполнительное устройство 2 совместно с задатчиком частоты сканирования 1 и частотным датчиком 6 обеспечивают стабилизацию частоты вращения кулачка 4 и, соответственно, частоты сканирования, при этом реализуется так называемый астатический привод с дискретным управлением.
Измерение угла поворота СЭ на линейном участке закона движения основано на измерении пропорционального ему угла поворота кулачка 4 αк. Измерение угла αк производится подсчетом количества импульсов fчд, поступающих с частотного датчика 6 с момента прихода импульса начала кадра и дискретность измерения равна
/Фиг. 1/. Так как момент прихода импульса fчд может не совпадать с моментом прихода импульса начала кадра, то возможна погрешность в измерении угла поворота кулачка 4, достигающая значения
. Величина погрешности медленнодрейфующая и, в пределах длительности кадра, имеет практически постоянное значение. Она может быть учтена измерением промежутка времени между импульсом начала кадра и первым следующим за ним импульсом с частотного датчика 6 и введением соответствующей поправки в величину αк. Для увеличения точности измерения в интервале между импульсами с частотного датчика применяется интерполяция.
Рассмотрим работу введенных узлов, используя блок-схему СУ /Фиг. 1/ и временную диаграмму Фиг. 2. По фронту кадрового импульса, соответствующего началу кадра, устанавливаются в нулевое состояние счетчики 8, 9, 10. Кроме того, фронт этого импульса переводит в состояние логической единицы триггер 7. Первым же импульсом с частотного датчика 6 триггер 7 сбрасывается и, таким образом, на выходах триггера формируются импульсы, длительность которых соответствует временному интервалу между фронтами импульса начала кадра и первого импульса с частотного датчика 6, импульс с прямого выхода триггера 7 разрешает работу счетчика 8, а импульс с инверсного - запрещает работу счетчика 9. По переходу триггера 7 в состояние логического нуля счетчик 8 будет содержать код, пропорциональный временному интервалу между фронтом импульса начала кадра и импульсом с частотного датчика 6, а счетчик 9 перейдет к счету импульсов с частотного датчика 6. Содержимое обоих счетчиков 8 и 9 поступает в параллельном коде на входы параллельной загрузки счетчика - интерполятора 10. Предустановка его разрешается каждым импульсом с частотного датчика 6. Таким образом, счетчик 10 содержит код угла поворота кулачка 4, интерполированный импульсной последовательностью между моментами параллельной загрузки счетчика 10, точными значениями угла поворота из счетчиков 8 и 9.
Так как на линейном участке движения сканирующего элемента его угол поворота пропорционален углу поворота кулачка 4, то код, содержащийся в счетчике 10, будет пропорционален углу поворота СЭ. При необходимости измерения угла поворота СЭ во всем диапазоне движения необходимо к выходам счетчиков 10 подключить соответствующий функциональный преобразователь.
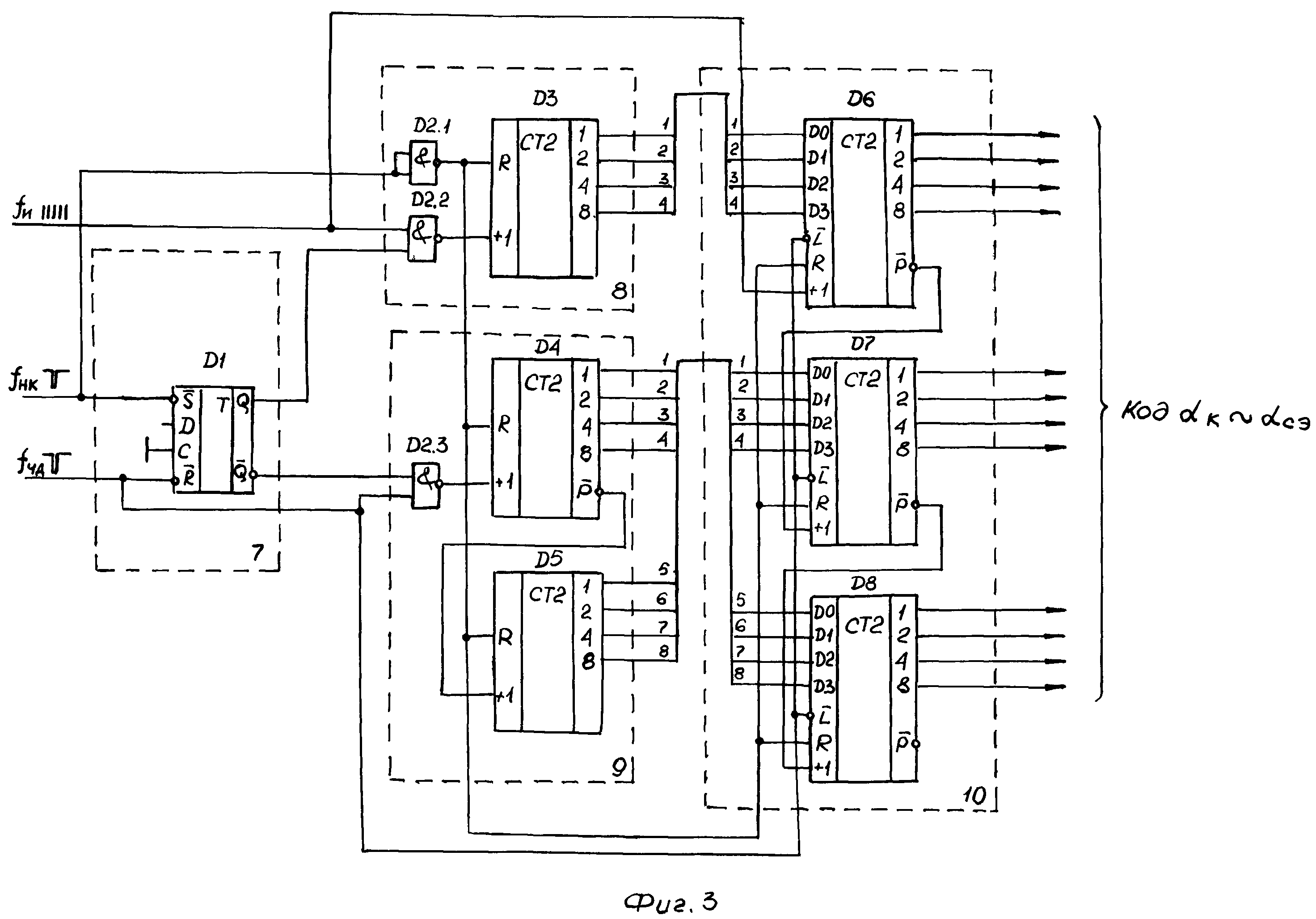
На фиг. 3 приведена упрощенная принципиальная схема узла измерения угла поворота СЭ, выполненная в соответствии с функциональной схемой, представленной на Фиг. 1.
Узел можно реализовать на ТТЛШ микросхемах средней и малой степени интеграции серии 533 /см. "Применение интегральных микросхем в электронной вычислительной технике", под ред. Файзулаева Б.Н., Тарабрина Б.В., Москва, "Радио и связь", 1987 г. /Л3/
В качестве триггера 7 использован Д-триггер с раздельными входами установки и сброса, например 533ТМ2. На используемые "С" и "D" входы поданы соответствующие логические уровни.
Счетчик 8 реализован на базе 4-разрядного двоичного счетчика D3, например 533ИЕ7 и двух элементов 2И-ИЕ, например 533ЛА3. Счетчик используется в режиме прямого счета без предварительной загрузки, поэтому на L-входы разрешения загрузки и тактовый вход обратного счета вводятся в пассивный уровень подачей потенциала логической единицы /на Фиг. 3 не показано/. Счетный вход и вход разрешения счета реализован на элементе 2И-ИЕ D2.2, выход которого соединен со счетным входом прямого счета счетчика D3. Для установки "0" счетчика 8 импульсом начала кадра с активным низким уровнем используется инвертор D2.1. Аналогично реализован счетчик 9, однако для увеличения разрядности он содержит два каскадно включенных счетчика D4 и D5. Счетчик-интерполятор 10 реализован на 3х двоичных четырехразрядных счетчиках D6, D7, D8 того же типа, включенных каскадно для получения необходимой разрядности. На неиспользуемые входы обратного счета подан высокий логический уровень /на Фиг.3 не показано/. Входы разрешения параллельной загрузки счетчиков объединены и на них подана последовательность fчд. Параллельные выходы разрядов счетчиков D6, D7, D8, являются выходами узла измерения угла поворота СЭ.
Предлагаемое сканирующее устройство позволит обеспечить высокоточное измерение угла поворота сканирующего элемента, что даст возможность создать высокоточные системы ТПВ и ТПП. Так, в системах ТПВ точность определения координат объекта повышается с 15′ до 0,7′.
Устройство для измерения угла поворота сканирующего элемента, содержащее генератор частоты сканирования, первый выход которого подключен к первому входу исполнительного блока, который выполнен в виде регулятора, двигателя и редуктора, сканирующий элемент, через кулачковый механизм связанный с валом редуктора, и датчик положения сканирующего элемента, выполненный в виде датчика частоты вращения вала редуктора, выход которого подключен к второму входу исполнительного блока, и датчика кадровых импульсов, отличающееся тем, что, с целью повышения точности измерения угла поворота сканирующего элемента, датчик положения сканирующего элемента снабжен триггером и тремя счетчиками, причем вход установки триггера соединен с выходом датчика кадровых импульсов и входами сброса первого, второго и третьего счетчика, вход сброса триггера соединен с выходом датчика частоты вращения вала редуктора, счетным входом второго счетчика и входом разрешения предустановки третьего счетчика, а прямой и инверсный выходы триггера соединены соответственно с входами разрешения счета первого и второго счетчиков, выходы которых соединены со входами параллельной загрузки третьего счетчика, счетный вход которого соединен со счетным входом первого счетчика и вторым выходом генератора частоты сканирования, а выходы разрядов третьего счетчика являются выходом устройства.