Результат интеллектуальной деятельности: ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ
Вид РИД
Изобретение
Предлагаемое устройство относится к области радиолокации и может быть использовано в области радионавигации, гидролокации и др., в задачах обнаружения групповых целей, распознавания типов целей, разрешения пересекающихся траекторий и др.
При измерении дальности до целей, которые находятся на таком взаимном расстоянии, что отраженные от них сигналы перекрываются, возникают затруднения в измерении дальности до каждой цели, так как суммарный сигнал мало отличается от сигнала, отраженного от одиночной цели.
Известно, что увеличение разрешающей способности по дальности в настоящее время достигается следующими методами, описанными, например, в книге под редакцией В.Е. Дулевича "Теоретические основы радиолокации", М., "Советское радио", 1978 г.:
- уменьшением длительности импульсов простых радиосигналов;
- применением широкополосных сложных сигналов со сжатием /линейно-частотно модулированные сигналы /ЛЧМ/, фазоманипулированные /ФМ/ сигналы и др./.
Основным условием повышения разрешающей способности по дальности является расширение полосы частот радиосигнала. Использование простых сигналов малой длительности ведет к уменьшению излучаемой энергии сигнала при ограничении пиковой мощности, что приводит к сокращению дальности обнаружения целей. Использование сложных сигналов со сжатием позволяет сохранять излучаемую энергию сигнала, но при этом предъявляются высокие требования к стабильностям параметров амплитудно-фазовых характеристик приемно-усилительных трактов в широкой полосе частот для обеспечения возможности сжатия сигналов с помощью согласованных фильтров.
Кроме того, требуются стабильные условия работы, сжимающих фильтров, помещение их в термостаты, а также предъявляются высокие требования к идентичностям их характеристик при серийном изготовлении. Поэтому практически существует предельная длительность, до которой можно сжать сложный радиосигнал.
В качестве прототипа выбран измеритель дальности, структурная схема которого приведена в главе 3.1 "Справочника по радиолокационным измерениям" авторов Д.К. Бартона и Г.Р. Варда, "Советское радио", М., 1976 г. Он содержит импульсную РЛС с высокочастотной частью со смесителем, генератором пусковых импульсов, согласованным фильтром, работающим на промежуточной частоте, пороговым устройством, фиксатором положения отраженного сигнала, измерителем задержки отраженного сигнала, при этом выход генератора пусковых импульсов соединен с входами начальной установки измерителя задержки отраженного сигнала и высокочастотной части, выход которой соединен со входом согласованного фильтра, выход которого соединен со входом порогового устройства и входом фиксатора положения отраженного сигнала, второй вход которого соединен с выходом порогового устройства, а выход фиксатора положения отраженного сигнала соединен со вторым входом измерителя задержки отраженного сигнала, выход которой является выходом измерителя дальности.
Высокочастотная часть РЛС содержит задающий генератор, передатчик, запускаемый от генератора пусковых импульсов, приемо-передающую антенну, смеситель, гетеродин, при этом выход задающего генератора подключен ко входу передатчика, где в момент прихода пускового импульса формируется зондирующий импульс простого или сложного сигнала, который поступает для излучения на передающий вход антенны, развязанного со входом приемного канала, например, газоразрядником. Принятый отраженный сигнал поступает на первый вход смесителя, на второй вход которого подается сигнал от гетеродина, частота которого смещена от частоты задающего генератора на промежуточную.
Сигнал с выхода смесителя усиливается и поступает на выход высокочастотной части РЛС, откуда поступает на вход согласованного фильтра.
Сигнал на выходе порогового устройства появляется на время наличия отраженного сигнала и подается на второй вход фиксатора положения отраженного сигнала для управления его работой.
Сигнал на выходе фиксатора положения отраженного сигнала появляется в момент максимального значения напряжения на выходе согласованного фильтра в интервале времени наличия сигнала на выходе порогового устройства и подается на измеритель задержки отраженного сигнала.
Измеритель задержки отраженного сигнала может быть выполнен на цифровом счетчике или на электронно-лучевой трубке и фиксирует значение задержки, поступившего на его вход импульса относительно импульса запуска передатчика.
Указанный в качестве прототипа измеритель дальности позволяет определить дальность до одиночной цели по задержке максимального значения отраженного сигнала относительно зондирующего импульса.
Недостатком прототипа является то, что, если поступит сигнал, отраженный от двух взаимно близкорасположенных целей, то огибающая отраженного суммарного сигнала может иметь один максимум и измеритель дальности произведет измерение задержки до этого максимума как для одиночной цели. Таким образом, групповая цель будет принята за одиночную и измерение дальности будет произведено с ошибкой.
Целью данного изобретения является разрешение перекрывающихся сигналов от двух неразрешаемых по угловым координатам и скоростям целей и измерения дальности до каждой из них в реальном масштабе времени.
Поставленная цель достигается тем, что в измеритель дальности, содержащий импульсную РЛС с согласованным фильтром на промежуточной частоте, пороговым устройством, фиксатором положения отраженного сигнала, генератором пусковых импульсов, высокочастотной частью и измерителем задержки пусковых импульсов, выход которой является выходом измерителя дальности, введены вычислитель определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах, анализатор числа целей, фиксатор перехода сигнала через нуль и коммутатор, при этом вход вычислителя определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах подключен к выходу согласованного фильтра РЛС, а его выход подключен ко входу фиксатора перехода сигнала через нуль и вторым входом анализатора числа целей, первый вход которого подключен к выходу порогового устройства РЛС, а выход подключен к третьему управляющему входу коммутатора, первый вход которого подключен к выходу фиксатора положения отраженного сигнала РЛС, второй вход подключен к выходу фиксатора перехода сигнала через нуль, а выход подключен ко входу измерителя задержки отраженного сигнала.
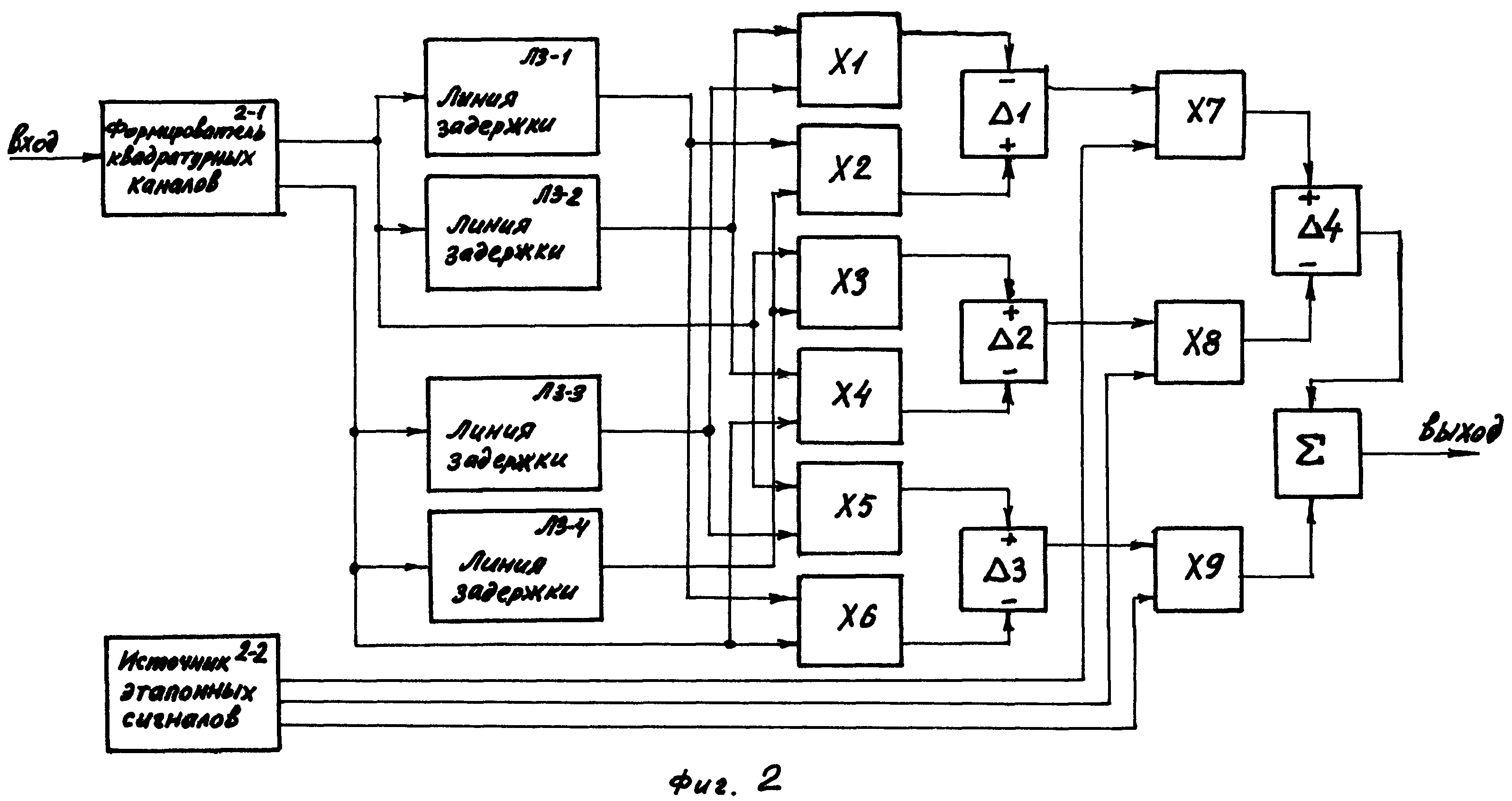
Вычислитель определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах, может быть выполнен на основе аналоговых вычислительных элементов и содержать формирователь квадратурных каналов, источник эталонных сигналов, четыре линии задержки, девять перемножителей, четыре вычитающих устройства и сумматор, при этом вход вычислителя определителя является входом формирователя квадратурных каналов, первый выход которого соединен со входами первой и второй линий задержки и первыми входами третьего и пятого перемножителей, а второй выход формирователя квадратурных каналов соединен со вторыми входами четвертого и шестого перемножителей и входами третьей и четвертой линий задержки, при этом выход первой линии задержки соединен с первыми входами второго и шестого перемножителей, выход второй линии задержки соединен с первыми входами первого и четвертого перемножителей, выход третьей линии задержки соединен со вторыми входами первого и пятого перемножителя, а выход четвертой линии задержки соединен со вторыми входами второго и третьего перемножителя, при этом выходы первого и второго перемножителей подключены соответственно к минусовому и плюсовому входам первого вычитающего устройства, выходы третьего и четвертого перемножителей подключены соответственно к плюсовому и минусовому входам второго вычитающего устройства, выходы пятого и шестого перемножителей подключены соответственно к плюсовому и минусовому входам третьего вычитающего устройства, а выходы первого, второго и третьего вычитающих устройств подключены соответственно к первым входам седьмого, восьмого и девятого перемножителей, вторые входы которых подключены соответственно к трем выходам источника эталонных сигналов, при этом выходы седьмого и восьмого перемножителей подключены соответственно к плюсовому и минусовому входам четвертого вычитающего устройства, выход которого и выход девятого перемножителя подключены к входам сумматора, выход которого является выходом вычислителя определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах.
Сущность изобретения состоит в том, что высокая разрешающая способность достигается путем анализа величин напряжения и фаз сигнала в трех его точках на временном интервале и совместной функциональной обработки этих величин и эталонных сигналов в реальном масштабе времени. Это достигается введением вычислителя определителя матрицы эталонных сигналов и сигналов трехканального расщепителя в квадратурных каналах, и фиксатора перехода сигнала через нуль, выполненных на аналоговых элементах. Для сохранения качества работы измерителя дальности при наличии одиночной цели введены анализатор числа целей и коммутатор, который переключает вход измерителя задержки отраженного сигнала или к выходу фиксатора положения отраженного сигнала, как было у прототипа, или к выходу фиксатора перехода сигнала через нуль в зависимости от того, одна цель наблюдается или более одной.
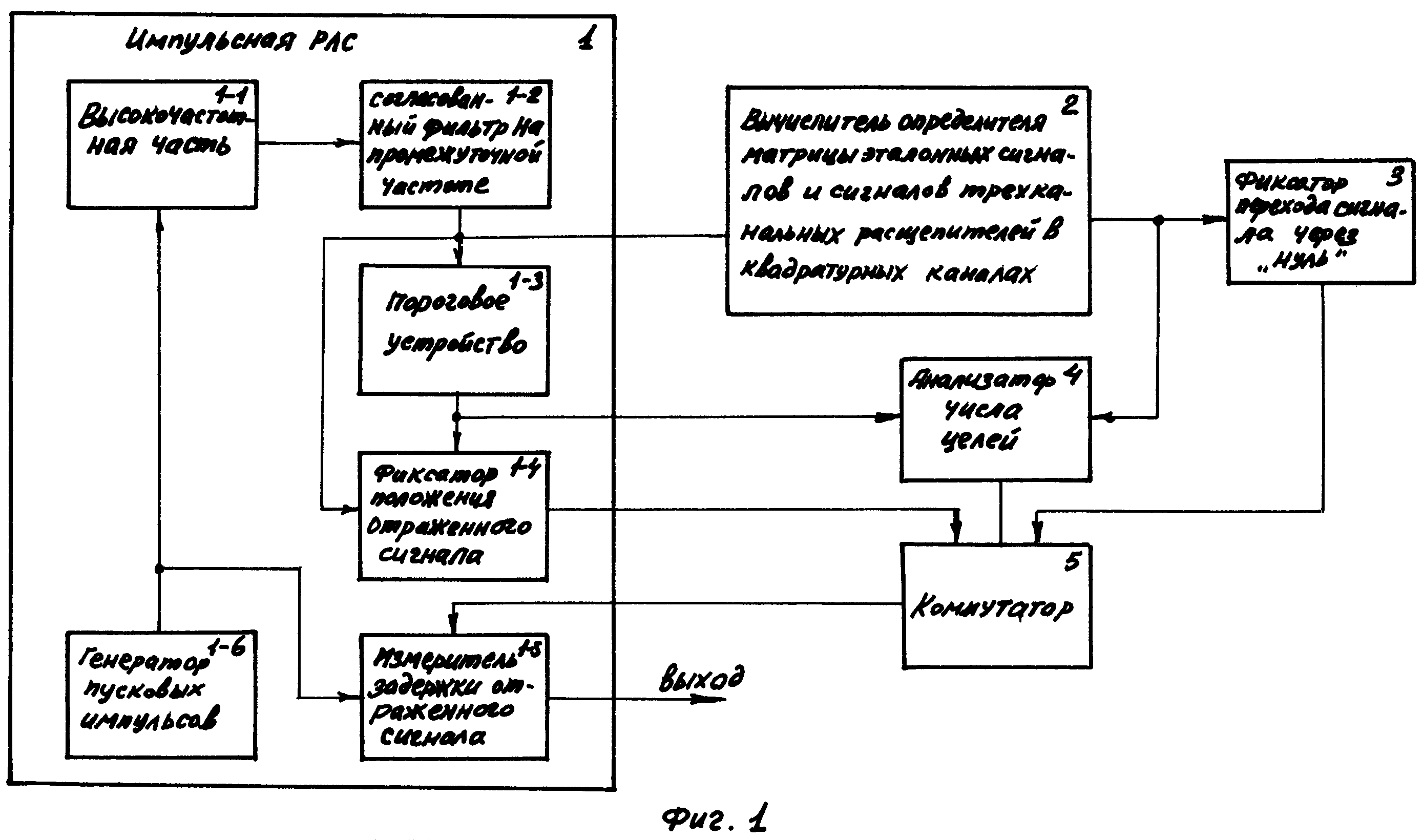
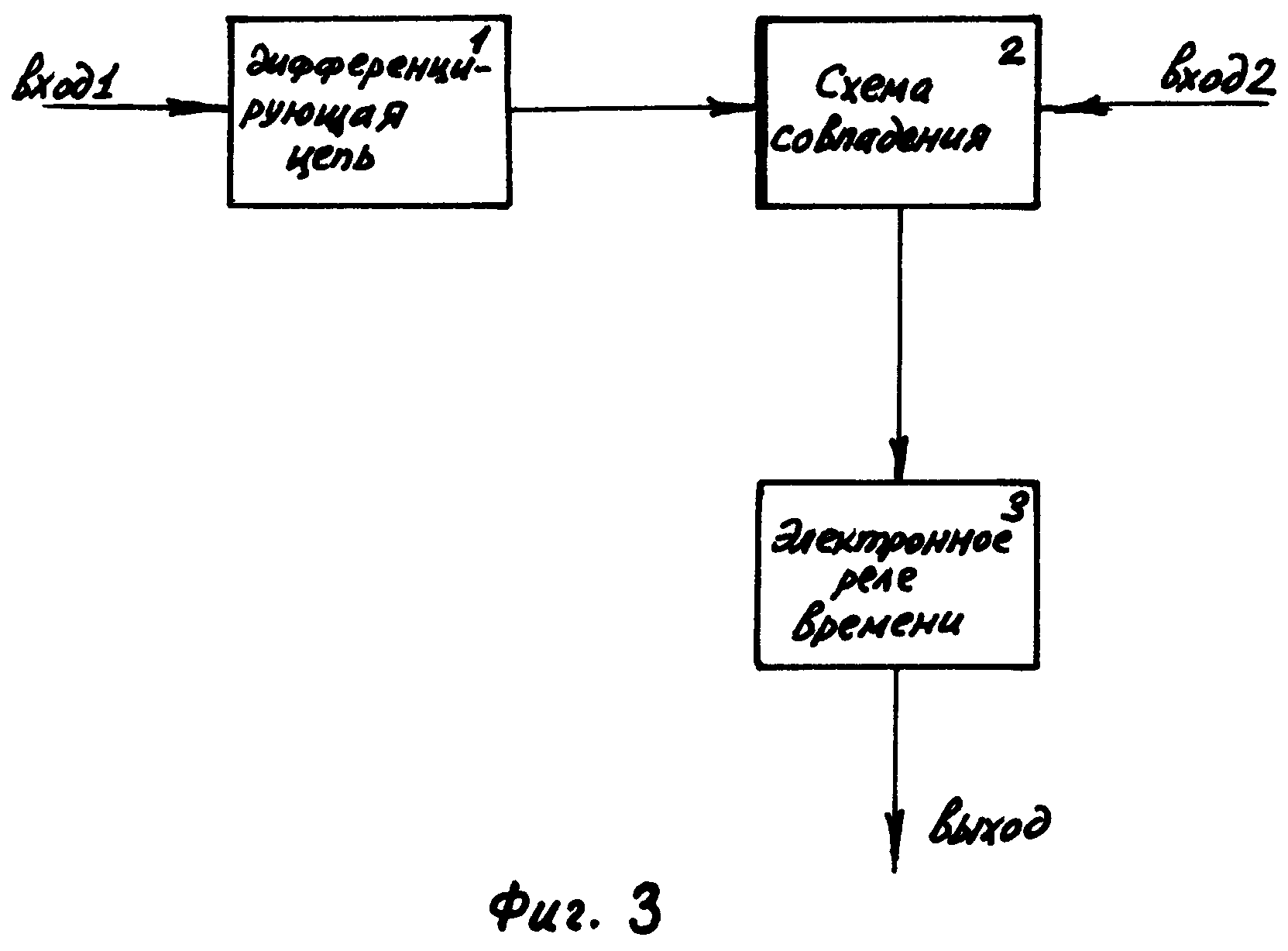
Предлагаемое изобретение иллюстрируется чертежами, где на фиг. 1 изображена структурная схема измерителя дальности, на фиг. 2 изображена структурная схема вычислителя определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах, на фиг. 3 изображена структурная схема анализатора числа целей, на фиг. 4 изображена огибающая сигнала на выходе согласованного фильтра и значения эталонных сигналов.
Предлагаемое устройство состоит /см. фиг. 1/ из импульсной РЛС /1/, содержащей высокочастотную часть /1-1/, согласованный фильтр на промежуточной частоте /1-2/, пороговое устройство /1-3/, фиксатор положения отраженного сигнала /1-4/, измеритель задержки отраженного сигнала /1-5/ и генератор пусковых импульсов /1-6/, при этом выход генератора пусковых импульсов /1-6/ соединен со входами начальной установки измерителя задержки отраженного сигнала /1-5/ и высокочастотной части /1-1/, выход которой соединен со входом согласованного фильтра /1-2/, выход которого соединен со входом порогового устройства /1-3/ и входом фиксатора положения отраженного сигнала /1-4/, второй вход которого соединен с выходом порогового устройства /1-3/, а выход измерителя задержки отраженного сигнала /1-5/ является выходом измерителем дальности, при этом выход согласованного фильтра /1-2/ подключен ко входу вычислителя определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах /2/, выход которого подключен ко входу фиксатора перехода сигнала через нуль (3) и ко второму входу анализатора числа целей /4/, выход которого подключен к управляющему входу коммутатора /5/, второй сигнальный вход которого подключен к выходу фиксатора перехода сигнала через нуль, первый сигнальный вход подключен к выходу фиксатора положения отраженного сигнала /1-4/, а выход подключен ко входу измерителя задержки отраженного сигнала /1-5/, а выход порогового устройства /1-3/ подключен к первому входу анализатора числа целей /4/.
Импульсная РЛС может быть РЛС обнаружения и РЛС сопровождения целей или многофункциональная РЛС.
Высокочастотная часть содержит задающий генератор, передатчик, запускаемый генератором пусковых импульсов, приемо-передающую антенну, смеситель, гетеродин, при этом выход задающего генератора подключен ко входу передатчика, где формируется зондирующий простой или сложный сигнал в момент прихода пускового импульса, который поступает для излучения на передающий вход антенны, развязанный с приемным каналом, например, газоразрядником. Принятый отраженный сигнал поступает на первый вход смесителя, на второй вход которого подается сигнал от гетеродина, частота которого смещена от частоты задающего генератора на промежуточную. Сигнал с выхода смесителя, как в прототипе, усиливается и поступает с высокочастотной части /1-1/ на согласованный фильтр /1-2/.
Согласованный фильтр может быть выполнен, как в прототипе, на полосовом фильтре для простого сигнала или на дисперсионных линиях задержки для ЛЧМ сигнала с выходным сигналом на промежуточной частоте с сохранением фазы сигнала.
Сигнал с выхода согласованного фильтра поступает на вход порогового устройства /1-3/ для обнаружения наличия отраженного сигнала, на вход фиксатора положения отраженного сигнала /1-4/, где уточняется положение отраженного от одиночной цели сигнала на интервале времени его наличия, определяемым пороговым устройством /1-3/, и на вход вычислителя определителя матрицы эталонных сигналов и сигналов трехканального расщепителя в квадратурных каналах /2/, на выходе которого сигнал переходит из ненулевого через нулевое значение в моменты наличия отраженного сигнала от каждой из сдвоенной групповой цели, что определяется фиксатором перехода сигнала через нуль /3/.
Пороговое устройство /1-3/ может быть выполнено, как в прототипе, на триггере Шмитта после детектирования сигнала.
Фиксатор положения отраженного сигнала /1-4/ может быть выполнен в виде фиксатора перехода сигнала через нуль и дифференциатора, определяющего момент появления пикового значения отраженного сигнала, при этом на его выходе напряжение переходит из ненулевого значения через нулевое, которое фиксируется схемой фиксации перехода сигнала через нуль, например, которая может быть выполнена также на базе триггера Шмитта с формированием импульсного сигнала при перепадах напряжения.
Вычислитель определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах, один из вариантов которого представлен на фиг. 2, может быть выполнен на основе аналоговых вычислительных элементов и содержать формирователь квадратурных каналов /2-1/, источник эталонных сигналов /2.2/, четыре линии задержки /ЛЗ-1÷ЛЗ-4/, девять перемножителей /X1÷Х9/, четыре вычитающих устройства /Δ1÷Δ4/, сумматор /Σ/, при этом входом вычислителя является вход формирователя квадратурных каналов, один выход которого подключен ко входам первой и второй линиям задержки /ЛЗ-1, ЛЗ-2/ и первым входам третьего и пятого перемножителей /Х3, Х5/ а второй выход подключен ко входам третьей и четвертой линиям задержки /ЛЗ-3, ЛЗ-4/ и вторым входам четвертого и шестого перемножителей /Х4, Х6/, при этом выход первой линии задержки /ЛЗ-1/ подключен к первым входам второго и шестого перемножителей /Х2, Х6/, выход второй линии задержки /ЛЗ-2/ подключен к первым входам первого и четвертого перемножителей /X1, Х4/, выход третьей линии задержки /ЛЗ-3/ подключен ко вторым входам первого и пятого перемножителей /X1, Х5/, выход четвертой линии задержки /ЛЗ-4/ подключен ко вторым входам второго и третьего перемножителей /Х2, Х3/, а три выхода источника эталонных сигналов подключены соответственно ко вторым входам седьмого, восьмого и девятого перемножителей /Х7, Х8, Х9/, первые входы которых соответственно подключены к выходам первого, второго и третьего вычитающих устройств /Δ1, Δ2, Δ3/, к минусовым входам которых соответственно подключены выходы первого, четвертого и шестого перемножителей /X1, Х4, Х6/, а плюсовые входы подключены соответственно к выходам второго, третьего и пятого перемножителей /Х2, Х3, Х5/, при этом выход седьмого перемножителя /Х7/ поступает на плюсовой вход четвертого вычитающего устройства /Δ4/, к минусовому входу которого подключен выход восьмого перемножителя /Х8/, а входы сумматора /Σ/ подключены соответственно к выходам четвертого вычитающего устройства /Δ4/ и девятого перемножителя /Х9/, при этом выход сумматора /Σ/ является выходом вычислителя матрицы.
Формирователь квадратурных каналов /2-1/ может быть выполнен по общеизвестному принципу, например, как показано на рис. 3.9 в книге "Теоретические основы радиолокации" под редакцией В.Е. Дулевича, "Советское радио", М., 1978 г., где он содержит два фазовых детектора, генератор промежуточной частоты, фазовращатель на 90° и два фильтра для подавления высокочастотных составляющих сигнала, при этом на первые входы фазовращателей поступает входной сигнал, на второй вход одного из них поступает сигнал от генератора промежуточной частоты, а на второй вход второго поступает сигнал от генератора промежуточной частоты через фазовращатель, а сигналы с выходов фазовых детекторов через фильтры поступают на выход формирователя квадратурных каналов.
Источник эталонных сигналов состоит из трех независимых источников постоянного напряжения с регуляторами напряжения для установки требуемых их значений при настройке устройства. О выборе значений напряжений будет пояснено при описании принципа работы измерителя дальности.
При работе устройства значения сигналов на первом выходе формирователя квадратурных каналов /2-1/ и выходах линий задержки /ЛЗ-1 и ЛЗ-2/ образуют первую строку матрицы сигналов, значения сигналов на втором выходе формирователя квадратурных каналов и выходах линий задержки /ЛЗ-3 и ЛЗ-4/ образуют вторую строку матрицы, а значения сигналов на выходах источника эталонных сигналов /2-2/ образуют третью строку матрицы. Схема, составленная из перемножителей вычитающих устройств и сумматора, вычисляет значение определителя этой матрицы.
Анализатор числа целей /см. фиг. 3/ выполнен в виде дифференцирующей цепи /1/, включенной между первым входом анализатора числа целей и первым входом ключевой логической схемы совпадения /2/, второй вход которой является вторым входом анализатора числа целей, а выход ее подключен ко входу электронного реле времени типа одновибратора /3/, выход которого является выходом анализатора числа целей. Длительность электронного реле времени подбирается равной длительности сигнала "двойной" цели.
Анализатор числа целей работает следующим образом.
При срабатывании порогового устройства РЛС сигнал, проходя через дифференцирующую цепь (1), образует выброс переднего фронта импульса, который сравнивается с напряжением, поступающим на вход 2 от вычислителя определителя матрицы. При наличии одной цели напряжение будет равно нулю в этот момент, а при наличии двух целей не будет равно нулю. Оно будет равно нулю только в момент времени внутри интервала наличия сигнала, а не в момент переднего фронта из-за наличия задержек в линиях задержки в вычислителе определителя матрицы /поз. 2 фиг. 1/, ключевая схема совпадения (2 фиг. 3) дает на выходе сигнал, который через реле времени (3) переключает коммутатор (5, фиг. 1) на прохождение сигнала от вычислителя определителя матрицы только тогда, когда напряжение не равно нулю на его выходе в момент переднего фронта сигнала. В противном случае подключается выход от фиксатора положения отраженного сигнала при измерении дальности до одиночной цели.
Сигнал с выхода коммутатора (5), поступающий на измеритель задержки сигнала (1-5) фиксирует состояние показания измерителя на момент прихода сигнала, которое выдается на выход измерителя дальности. Измеритель задержки может быть цифровым счетчиком дальности или электронно-лучевым индикатором. Измеритель задержки сигнала сбрасывается в начальное состояние импульсом при запуске передатчика.
Коммутатор представляет собой ключевые схемы в виде электронных реле, которые известны и применяются при коммутации сигналов.
Схема фиксации перехода через "нуль" может быть выполнена, например, в виде триггера Шмитта с формирователем импульсного сигнала для фиксации перепадов напряжения триггера.
Измеритель дальности работает следующим образом.
Простой или сжатый сложный сигнал с выхода оптимального на промежуточной частоте поступает на вход вычислителя определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах /фиг. 1/.
Сигнал в вычислителе /2/ поступает на формирователь квадратурных каналов /поз. 2-1, фиг. 2/, сигналы с выхода которого расщепляются на три канала с помощью линий задержек в каждом квадратурном канале.
С выхода оптимального фильтра суммарный сигнал U(t) от двух целей поступает на промежуточной частоте ω с огибающей, зависящей от характеристик фильтра, и со случайной фазой:
U(t)=A1f(t-τ1)Sin(ωt+φ1)+A2f(t-τ2)Sin(ωt+φ2)
где - A1, A2 - амплитуда сигнала от первой и второй цели соответственно,
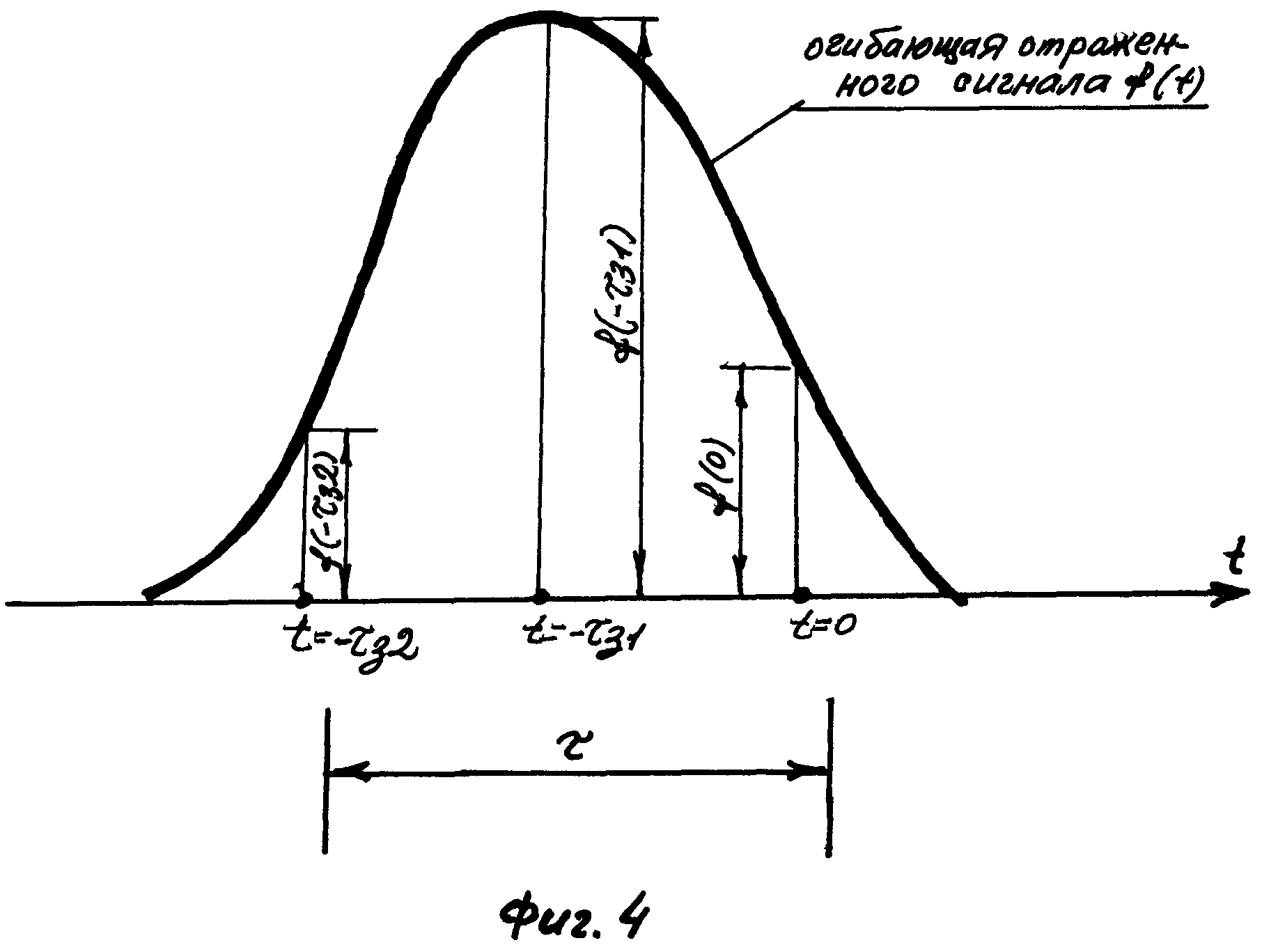
f(t) - форма огибающей одиночного сигнала с единичной амплитудой,
t - текущее время от начала пускового импульса,
τ1, τ2 - задержка сигнала в пространстве от первой и второй цели соответственно,
φ1, φ2 - случайная фаза первого и второго сигнала соответственно.
На выходах квадратурных каналов после фазового детектирования и фильтрации высокочастотных компонент получаем сигналы:
Uc=A1f(t-τ1)Cosφ1+A2f(t-τ2)Cosφ2
Us=A1f(t-τ1)Sinφ1+A2f(t-τ2)Sinφ2
После задержки этих сигналов на линиях задержки на τз1 для линий ЛЗ-1 и ЛЗ-3 и на τз2 для линий ЛЗ-2 и ЛЗ-4 получаем следующие величины сигналов для первых двух строк матрицы, образованных из задержанных и незадержанных сигналов:
Uc11=A1f(t-τ1)Cosφ1+A2f(t-τ2)Cosφ2
Uc12=A1f(t-τ1-τз1)Cosφ1+A2f(t-τ2-τз1)Cosφ2
Uc13=A1f(t-τ1-τз2)Cosφ1+A2f(t-τ2-τз2)Cosφ2
Us21=A1f(t-τ1)Sinφ1+A2f(t-τ2)Sinφ2
Us22=A1f(t-τ1-τз1)Sinφ1+A2f(t-τ2-τз1)Sinφ2
Us23=A1f(t-τ1-τз2)Sinφ1+A2f(t-τ2-τз2)Sinφ2
Третья строка матрицы состоит из эталонных сигналов, которые подбираются такими, чтобы:
F31=f(0);
F32=f(-τз1);
F33=f(-τз2);
Величины задержек τз1 и τз2 подбираются при конструировании РЛС такими, чтобы их величина была не более чем длительность сигнала τ /τз1<τ; τз2<τ/ от одиночной цели и для каждой формы огибающей подбираются из условия максимизации помехозащищенности. Пример выбора эталонных сигналов показан на фиг. 4 для произвольной огибающей сигнала с длительностью τ.
Можно показать, что определитель матрицы, составленной из полученных девяти сигналов, будет равен нулю
только в следующие моменты времени t1 и t2:
1/ t1-τ1=0
2/ t2-τ2=0
Откуда следует, что
t1=τ1
t2=τ2
т.е. в моменты времени t1 и t2 на выходе фиксатора перехода сигнала через нуль /поз. 3, фиг. 1/ появятся сигналы, которые будут соответствовать задержкам сигналов τ1 и τ2 на прохождение их до первой и второй цели соответственно и обратно до антенны.
Применение предлагаемого измерителя дальности с разрешением двух взаимно близкорасположенных целей возможно в любой РЛС с импульсным излучением сигналов и с оптимальным фильтром, на выходе которого сохраняется информация об амплитуде и фазе сигнала. Степень разрешения сигналов зависит от соотношения сигнал/помеха и путем моделирования на ЦВМ определено, что при соотношении сигнал/помеха более 20 дБ степень разрешения может достигать до 0.1 от длительности импульса.
Для получения такого разрешения путем расширения полосы сигнала, следовало бы расширять полосу в 10 раз, что значительно усложнило бы конструкцию всех узлов, начиная от формирования сигнала в передатчике и до обработки отраженного сигнала в оптимальном фильтре.
Предлагаемый измеритель дальности может быть применен не только во вновь разрабатываемых, но и в существующих РЛС при их модернизации для улучшения тактико-технических характеристик путем дополнительного ввода в виде блока, содержащего вычислитель определителя матрицы эталонных сигналов и сигналов трехканальных расщепителей в квадратурных каналах, анализатор числа помех, фиксатор перехода сигнала через нуль и коммутатор.
Использование такого измерителя позволит обнаруживать групповые цели, снижать вероятность перепутывания траекторий при сопровождении целей, увеличить точность измерения дальности при взаимно близкорасположенных целях, увеличить помехозащищенность при пассивных помехах.
Предлагаемый измеритель дальности позволяет повысить способность в 5-10 раз по сравнению с разрешающей способностью применяемого простого или сложного сигнала. Например, при длительности сигнала 0.5 мкс разрешающая способность, составляющая 75-200 м, может быть улучшена до 8-15 м.
Усложнение конструкции измерителя дальности при этом незначительно и не превосходит 4-5 кассет.
Мультипликативная антенна

