Результат интеллектуальной деятельности: ПАССИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области радиолокации и может быть использовано при разработке радиолокационных систем обнаружения и определения координат источников излучения.
Наиболее распространенным методом определения координат источников излучения является пеленгационный (угломерный) метод, который применяется, если с помощью измерительных систем, расположенных в различных точках, определяются только направления на цель, а также определяются база между системами и углы взаимного ориентирования. Тогда местоположения цели на плоскости находится как точка пересечения двух линий пеленгов (см. ″Теоретические основы радиолокации″ под ред. Дулевича, М.: Сов. радио, 1964, c. 15). На основании данного метода разработан целый ряд пассивных систем.
Известна система определения координат движущихся источников излучения. Система на каждом корабле содержит антенну, датчик пеленга, силовой следящий привод, приемник, блок кодирования, блок селекции и идентификации (БСИ), формирователь весовых коэффициентов, экстраполятор пеленгов и приемопередающий канал радиосвязи.
На флагманском корабле имеется измеритель дальности и индикатор, а на корабле группы - буферный регистр. Такое построение пассивной системы позволяет производить сглаживание пеленгов отдельно на каждом корабле со своими весовыми коэффициентами, а на флагманском корабле по сглаженным пеленгам определять дальность до источника излучения. Но такое построение системы не обеспечивает требуемых точностей определения дальности.
Известна система определения координат движущихся источников излучения. Система размещается на двух кораблях, соединенных радиолинией связи, и на каждом корабле состоит из антенны, датчика пеленга, силового следящего привода, приемника, блока кодирования, блока селекции и идентификации, формирователя весовых коэффициентов, экстраполятора пеленгов, счетчика пеленгов, дешифратора, ПЗУ, блока сравнения, приемопередающего канала радиолинии связи и сумматора, кроме того на флагманском корабле состоит из измерителя дальности, а на корабле группы - из буферного регистра. Такое построение не обеспечивает требуемых точностей определения дальности, а к тому же ограничивает количество целей, по которым производится измерение координат.
Наиболее близкой по технической сути и потому выбранной в качестве прототипа является система определения координат подвижных источников излучения.
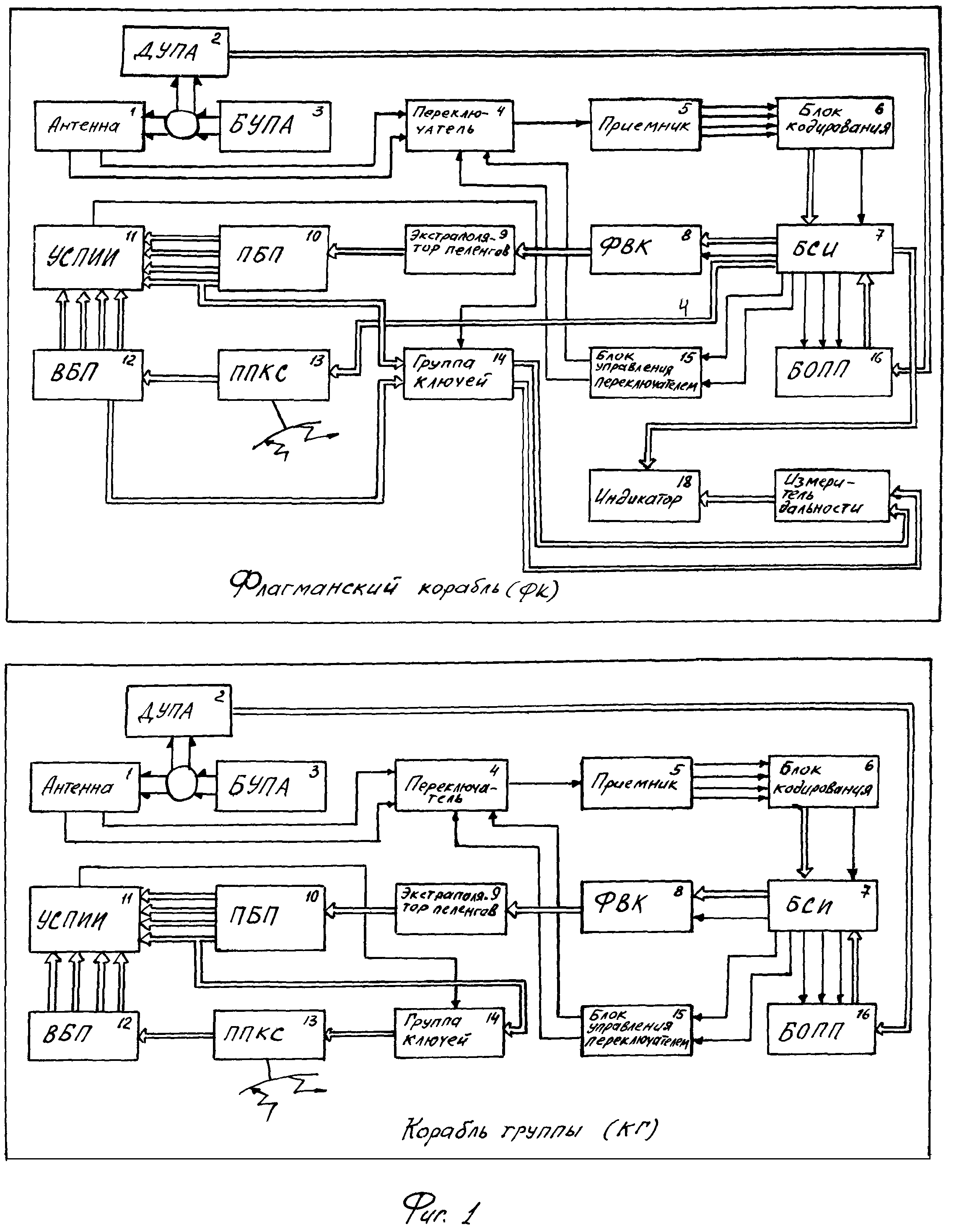
Пассивная система определения координат подвижных источников излучения размещается на двух кораблях (один из которых флагманский (ФК), а второй - корабль группы (КГ), соединенных между собой радиолинией связи, и состоит на каждом корабле из последовательно соединенных антенны, размещенной совместно с датчиком углового положения антенны (ДУПА) на валу блока управления положением антенны (БУПА), приемника, блока кодирования, второй, третий и четвертый входы которого соединены с соответствующими выходами приемника, блока селекции и идентификации, второй вход которого соединен с вторым выходом блока кодирования, а третий вход - с выходом ДУПА, формирователя весовых коэффициентов (ФВК), экстраполятора пеленгов и первого блока памяти (ПБП), а кроме того, состоит из устройства сравнения параметров источников излучения (УСПИИ), второго блока памяти (ВБП), приемопередающего канала связи (ППКС) и ключа KI, при этом четыре выхода ПБП соединены с первой группой из четырех входов УСПИИ, вторая группа из четырех входов которого соединена с четырьмя выходами ВБП, вход которого соединен с выходом ППКС, а на ФК состоит из ключа КI, измерителя дальности, индикатора и группы ключей, причем четвертый выход ПБП через ключ КI соединен с первым входом измерителя дальности, выход которого соединен с первым входом индикатора, второй вход которого соединен с вторым выходом БСИ, третий выход БСИ соединен со входом ППКС, пятый выход ВБП через группу ключей соединен с вторым входом измерителя дальности, управляющие входы ключа КI и группы ключей соединены с выходом УСПИИ, а на корабле группы пятый выход БПБ через ключ КI соединен со входом ППКС, управляющий вход ключа КI соединен с выходом УСПИИ.
Система-прототип размещается на кораблях-носителях и работа на каждом из кораблей происходит почти аналогично и следующим образом. Антенна с использованием БУПА производит пространственный поиск.
ДУПА фиксирует угловое положение антенны. При обнаружении сигналов разведываемых источников излучения они из антенны поступают в приемник, усиливаются и в блоке кодирования производится кодирование параметров τ (длительность), f (несущая частота) и t (времени прихода).
Коды τ, f, t каждого импульса совместно со стартом поступают в БСИ, в котором вначале сигналы селектируются в последовательности, которые характеризуются параметрами τ, f, t, T (период повторения), Пi (пеленг), а затем последовательности объединяется в цели, для которых определяется  , где Пн и Пк - значение пеленгов последовательностей, которые начали формировать цель и закончили формирование цели.
, где Пн и Пк - значение пеленгов последовательностей, которые начали формировать цель и закончили формирование цели.
Коды τ, f, T, Пц, t, Пн, Пк поступают в ФВК, в котором по величине разницы Пк-Пн определяется вес каждого измерения (К).
Коды τ, f, T, Пц, t, n (количество обнаружений), К поступают в экстраполятор пеленгов, в котором производится сглаживание пеленгов. Псг совместно с другими кодами τ, f, T, t поступают в ПБП. На первую группу входов УСПИИ поступают коды τ, f, T, Псг полученные на своем корабле, а на вторую группу входов УСПИИ поступают коды τ, f, T, Псг, полученные на втором корабле и поступившие по радиолинии связи ППКС.
На ФК коды τ, f, T со второго выхода БСИ поступают на второй вход индикатора, а с третьего выхода БСИ коды τ, f, Т, Пц поступают в ППКС и по радиолинии связи приходят на ППКС корабля группы и затем во ВБП.
При сравнении кодов в УСПИИ с его выхода снимается управляющий сигнал, который открывает ключ КI и группу ключей. Код Псг ф с четвертого выхода ПБП поступает через ключ КI на первый вход измерителя дальности, на второй вход которого через группу ключей с пятого выхода ВБП коды Псг кг и коды d (база между носителями) ПКФ (пеленг с КГ на ФК), ПФК (пеленг с флагмана на КГ), которые определяются совместной работой ППКС на двух кораблях. В измерителе дальности определяется дальность до источника излучения в соответствии с выражением:
 .
.
Код дальности Дф ц и пеленга Псг ф поступают на индикатор.
Недостаток системы-прототипа заключается в недостаточной точности определения дальности до источника излучения.
Как известно из литературы (см. Сайбель ″Основы радиолокации″ Сов. радио, М., 1961, с. 272-290), среднеквадратическая ошибка определения дальности при пеленгационном методе может быть вычислена по формуле:
 ;
;
где σn - среднеквадратическая ошибка определения пеленга;
Д - дальность до источника излучения;
d - база между флагманским кораблем и кораблем группы.
Так как в пассивной системе для обеспечения высокой вероятности обнаружения источников излучения используется суммарная диаграмма направленности (ДН) антенны, которая формируется двумя парциальными лепестками (путем размещения двух облучателей, разнесенных относительно фокуса антенны), то ее ширина почти в два раза шире, чем ДН сформированная одним лепестком. Поэтому среднеквадратическая ошибка пеленгования σпел суммарной ДН составляет величину порядка 1°, что не позволяет определять дальность с требуемой точностью (особенно на больших дальностях до источника излучения).
Целью данного изобретения является повышение точности определения дальности до источника излучения.
Поставленная цель достигается за счет того, что в известную радиолокационную систему определения координат движущихся источников излучения, содержащую на каждом корабле антенну, размещенную совместно с датчиком углового положения антенны (ДУПА) на валу блока управления положением антенны, последовательно соединенные приемник, блок кодирования, второй, третий и четвертый входы которого соединены с соответствующими выходами приемника, блок селекции и идентификации (БСИ), второй вход которого соединен со вторым выходом блока кодирования, формирователь весовых коэффициентов (ФВК), второй вход которого соединен со вторым выходом БСИ, экстраполятор пеленгов и первый блок памяти (ПБП), а также содержит устройство сравнения параметров источников излучения (УСПИИ), второй блок памяти (ВБП), приемопередающий канал связи (ППКС) и группу ключей, при этом четыре выхода ПБП соединены с первой группой из четырех входов УСПИИ, вторая группа из четырех входов УСПИИ соединена с четырьмя выходами ВБП, вход которого соединен с выходом ППКС, выход УСПИИ соединен с управляющим входом группы ключей, кроме того содержит на ФК последовательно соединенные измеритель дальности и индикатор, второй вход которого соединен с третьим выходом БСИ, четвертый выход которого соединен со входом ППКС, четвертый выход ПБП и пятый выход ВБП через группу ключей соединены соответственно с первым и вторым входами измерителя дальности, а на КГ пятый выход ПБП через группу ключей соединен со входом ППКС, введены на каждом корабле переключатель, блок управления переключателем и блок определения пеленга последовательности, при этом первый и второй входы переключателя соединены с первым и вторым выходами антенны, третий и четвертый входы переключателя соединены с выходами блока управления переключателем, выход переключателя соединен со входом приемника, выход ДУПА соединен с первым входом блока определения пеленга последовательности, выход которого соединен с третьим входом БСИ, на ФК пятый и шестой выходы БСИ соединены со входами блока управления переключателем, седьмой, восьмой и девятый выходы БСИ соединены с вторым, третьим и четвертым входами блока определения пеленга последовательности, а на КГ третий и четвертый выходы БСИ соединены с входами блока управления переключателем, пятый, шестой и седьмой выходы БСИ соединены с вторым, третьим и четвертым входами блока определения пеленга последовательности.
Такое построение системы определения координат движущихся источников излучения позволяет производить пространственный поиск сигналов суммарным лепестком диаграммы направленности (ДН) антенны (чем обеспечивается такая же вероятность обнаружения сигналов), а после выполнения критерия обнаружения последовательности с использованием БСИ, блока управления переключателем и переключателя производится последовательное включение левого и правого парциальных лепестков ДН антенны.
В зависимости от того, каким парциальным лепестком обнаруживаются сигналы последовательности с использованием БСИ и блока определения пеленга последовательности определяется пеленг Пi последовательности в соответствии с выражением:
где Птек - текущий пеленг антенны;
Δ - смещение средины парциального лепестка относительно средины суммарного лепестка.
Таким образом, использование БСИ, переключателя, блока управления переключателя и блока определения пеленга последовательности позволяет определять пеленг последовательности с максимальными ошибками почти в два раза меньшими, чем в прототипе, а это значит, что можно измерять дальность до источника излучения с ошибками почти в два раза меньшими, чем для прототипа в одинаковых условиях.
Авторы не обнаружили решений со сходными признаками и делают вывод, что предлагаемое решение обладает существенными признаками.
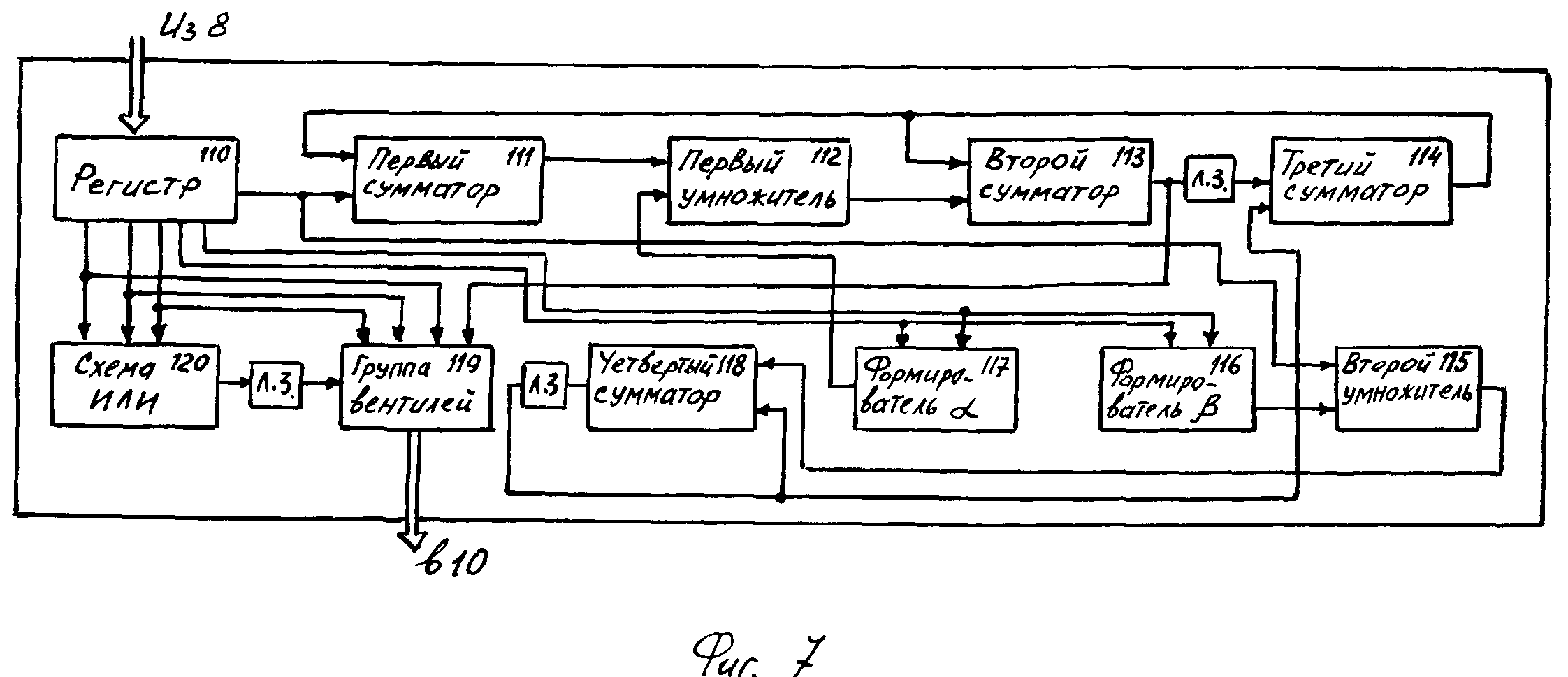
Сущность изобретения поясняется чертежами, где на Фиг. 1 представлена блок-схема радиолокационной системы определения координат движущихся источников излучения, на фиг. 2 - взаимное расположение ФК и КГ, и источника излучения при измерении дальности до источника излучения; на Фиг. 3 - зависимость среднеквадратической ошибки определения дальности от дальности до источника излучения; на Фиг. 4 - блок-схема приемника; на Фиг. 5 - блок-схема блока кодирования; на Фиг. 6, 6а - блок-схема блока селекции и идентификации; на Фиг. 7 - блок-схема экстраполятора пеленгов; на Фиг. 8 - блок-схема блока определения пеленга последовательности; на Фиг. 9 - блок-схема измерителя дальности.
Предлагаемая радиолокационная система определения координат движущихся источников излучения (см. фиг. 1, 2) размещается на двух кораблях и состоит на флагманском корабле и корабле группы из последовательно соединенных антенны 1, размещенной совместно с датчиком углового положения антенны (ДУПА) 2 на валу блока управления положением антенны 3, переключателя 4, второй вход которого соединен с вторым выходом антенны 1, приемника 5, блока кодирования 6, второй, третий и четвертый входы которого соединены с соответствующими выходами приемника 5, блока селекции и идентификации (БСИ) 7, второй вход которого соединен с вторым выходом блока кодирования 6, формирователя весовых коэффициентов (ФВК) 8, экстраполятора пеленгов 9 и первого блока памяти (ПБП) 10, и из устройства сравнения параметров источников излучения (УСПИИ) 11, второго блока памяти (ВБП) 12, приемопередающего канала связи (ППКС) 13, группы ключей 14, блока управления переключателем 15, и блока определения пеленга последовательности 16, при этом четыре выхода ПБП 10 соединены с первой группой из четырех входов УСПИИ 11, вторая группа из четырех входов которого соединена с четырьмя выходами ВБП 12, вход которого соединен с выходом ППКС 13, выход УСПИИ 11 соединен с управляющим входом группы ключей 14, первый и второй выходы блока управления переключателем 15 соединены соответственно с третьим и четвертым входами переключателя, выход ДУПА 2 соединен с первым входом блока определения пеленга последовательности 16, выход которого соединен с третьим входом БСИ 7, кроме того, на ФК состоит из последовательно соединенных измерителя дальности 17 и индикаторы 18, второй вход которого соединен с третьим выходом БСИ 7, четвертый выход которого соединен со входом ППКС 13, пятый и шестой выходы БСИ 7 соединены со входами блока управления переключателя 15, седьмой, восьмой и девятый выходы БСИ 7 соединены с вторым, третьим и четвертым входами блока определения пеленга последовательности 16, четвертый выход ПБП 10 и пятый выход ВБП 12 через группу ключей 14 соединены со входами измерителя дальности 17, а на КГ третий и четвертый выходы БСИ 7 соединены со входами блока управления переключателем 15, пятый, шестой и седьмой выходы БСИ 7 соединены со вторым, третьим и четвертым входами блока определения пеленга последовательности 16.
Предлагаемая радиолокационная система определения координат движущихся целей размещается на двух кораблях, один из которых флагманский корабль (ФК), а второй - корабль группы (КГ) и работает почти аналогично на каждом корабле и следующим образом.
Антенна 1 при помощи блока управления положением антенны 3 совершает пространственный поиск. ДУПА 2 фиксирует угловое положение антенны 1. При обнаружении сигнала источника излучения он из антенны 1 поступает через переключатель 4 (который открыт и пропускает сигналы, обнаруженные двумя парциальными лепестками, т.е. суммарной ДН антенны 1) на приемник 5.
Приемник 5 представляет собой супергетеродинный приемник радиолокационного типа, в котором сигнал усиливается, детектируется и при превышении над порогом считается, что он обнаружен и на входы кодирования 6 поступают два дополнительных сигнала ″передний″ и ″задний″ (соответствующие моментам времени прихода переднего и заднего фронтов импульса).
Кроме того, на вход блока кодирования 6 поступают еще два дополнительных сигнала ″начало полосы″ и ″конец полосы″, которые соответствуют моментам времени нахождения панорамного гетеродина в начале либо конце перестраиваемых несущих частот. В блоке кодирования 6 с использованием дополнительных сигналов происходит кодирование τ (длительности), f (несущей частоты) и t (времени прихода).
С выхода блока кодирования 6 коды τ, f, t с каждого обнаруженного сигнала совместно с управляющим сигналом "старт" поступают в БСИ 7.
В этом блоке 7 вначале происходит формирование последовательности и при выполнении критерия обнаружения выдается сигнал в блок управления переключателем 15, по которому происходит включение только правого парциального лепестка и при обнаружении сигнала в этот момент запоминается признак обнаружения правым лепестком и выдается сигнал в блок управление переключателем 15, по которому происходит включение только левого лепестка и при обнаружении сигнала запоминается этот признак.
После окончания последовательности в блок определения пеленга последовательности 16 поступают три сигнала из БСИ 7 (один из которых управляющий, а два - являются признаками обнаружения (либо необнаружения если ″0″) при работе одиночных парциальных лепестков.
В зависимости от наличия этих признаков в блоке определения пеленга 16 формируется пеленг последовательности в соответствии со следующим правилом:
а) Пi=Птек, если имеются оба признака либо они оба отсутствуют;
б) Пi=Птек+Δ, если имеется только один признак, соответствующий обнаружению только правым лепестком;
в) Пi=Птек-Δ, если имеется только один признак, соответствующий обнаружению только левым лепестком.
Оконченная последовательность, которая характеризуется такими параметрами как τ, f, T, t, Пi в БСИ 7 идентифицируется с другими оконченными последовательностями, формируя цель за один пространственный обзор. Для каждой цели, которая характеризуется параметрами τ, f, T (период повторения), t, Пн, Пк - пеленги последовательностей, которые соответственно начали и окончили цель, определяется пеленг цели:
 .
.
Коды каждой цели поступают в ФВК 7, где по значениям Пн и Пк формируется весовая функция ″К″, после чего коды τ, f, T, t, Пц, К поступают в экстраполятор пеленгов 9, где получают сглаженное значение пеленга Псг, которое совместно с параметрами τ, f, T поступает в ПБП 10.
На ФК после обнаружения цели коды τ, f, T поступают на индикатор 18, а коды τ, f, Т, Пц поступают в ППКС 13 и по радиолинии связи поступают на КГ в ППКС 13, из которого они заносятся во ВБП 12.
На КГ при сравнении параметров цели, поступившей из ФК, и цели, обнаруженной на КГ, из УСПИИ 11 выдается управляющий сигнал на группу ключей 14, через которые коды цели τ, f, T, Псг кг из ПБП 10 поступают в ППКС 13 и по радиолинии связи поступают на ФК в ППКС 13, а затем - во ВБП 12.
При сравнении кодов цели, поступившей из КГ, и цели, обнаруженной на ФК, из УСПИИ 11 выдается управляющий сигнал на группу ключей 14, через которую код Псг ф из четвертого выхода ПБП 10 и коды Псг кг, d (база между ФК и КГ), ПКФ, ПФК (которые определяются совместной работой ППКС 13 обоих носителей) поступают на входы измерителя дальности 17, в котором определяется дальность от ФК до цели в соответствии с выражением:
Коды Дф ц и Псг ф поступают на индикатор 18.
Антенна 1 представляет собой типовую антенну радиолокационных систем, содержащую зеркало, вращающийся волноводный переход и два рупорных облучателя, которые смещены из фокуса, что позволяет формировать два парциальных лепестка диаграммы направленности, оптические оси которых смещены относительно суммарной ДН.
Выходы облучателей являются двумя выходами антенны 1. Типовые антенны описаны в литературе (см. Сколник ″Введение в технику радиолокационных систем″. М.: Мир, 1965, с. 317-429).
Датчик углового положения антенны (ДУПА) 2 выполнен на стандартном преобразователе вал - код ПВК2-12 и обеспечивает преобразование угла в 12-разрядный код с ценой младшего разряда 5 мин (см. ″Теоретические основы радиолокации″. Под ред. Дулевича. М.: Сов. радио, 1964 г., с. 481-490).
Блок управления положением антенны 3 представляет собой типовой блок управления положением антенны (см. ″Следящие приводы″. Под ред. Чемоданова, кн. 2, М., Э., 1976 г., с. 3-10), который имеет в качестве исполнительных элементов электрические двигатели постоянного либо переменного тока, а в качестве усилителей мощности - электромеханические преобразователи или преобразователи на базе транзисторов или тиристоров.
Переключатель 4 представляет собой тройник, выполненный на симметричной полосковой линии с диэлектрическим заполнением, в два плеча которого на расстоянии полуволны последовательно в линии центрального тройника установлено по nipin-диоду типа 2А 505А.
В обесточенном состоянии плечи переключателя закрыты и сигналы через него не проходят. При подаче на nipin-диод положительного смещения (около 150 мА) сопротивление диода уменьшается и канал (или каналы) переключения открываются.
При формировании суммарной диаграммы каналы открыты одновременно, а при формировании парциальных лепестков - поочередно.
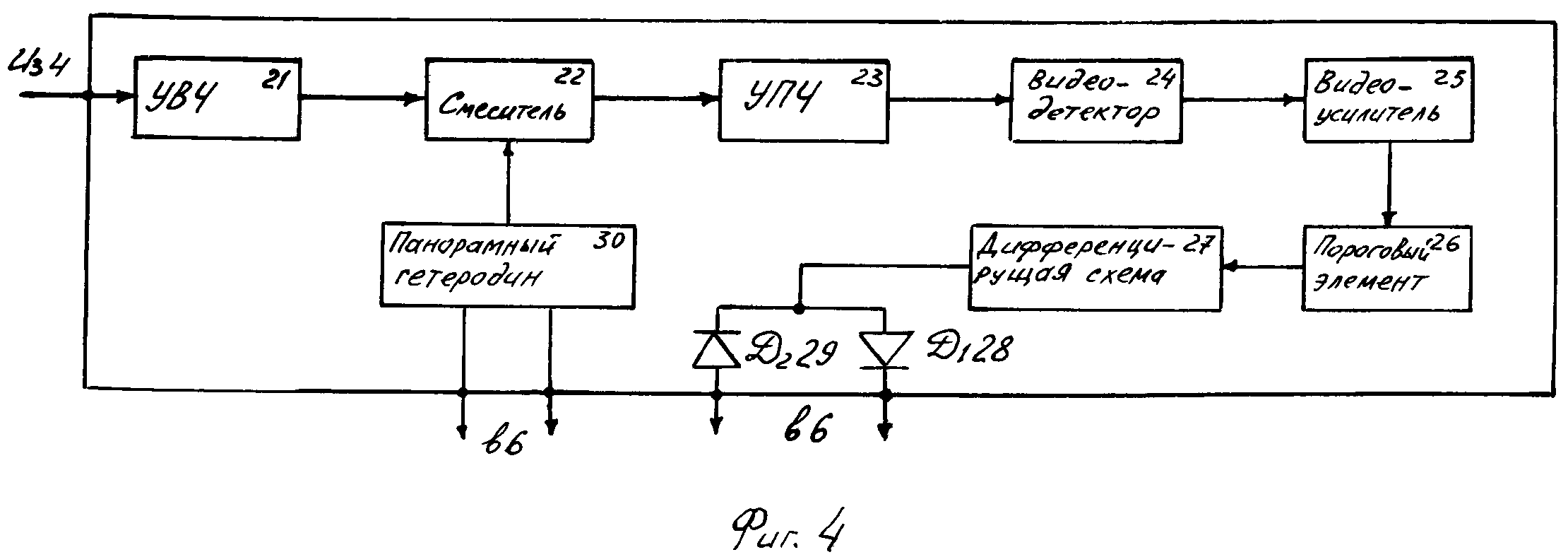
Приемник 5, состав и связи которого представлены на Фиг. 4, представляет собой радиолокационный супергетеродинный приемник и работает следующим образом.
Обнаруженные сигналы из переключателя 4 поступают в приемник 5, где они усиливаются в УВЧ 21, преобразуются в промежуточную частоту в смесителе 22, усиливаются в УПЧ 23, детектируются в видеодетекторе 24 и усиливаются в видеоусилителе 25 и при превышении порога в пороговом элементе 26 сигнал считается обнаруженным и на дифференцирующей схеме 27 формируются дополнительные сигналы ″передний″ и ″задний″, соответствующие моментам времени появления переднего и заднего фронтов сигнала, которые поступают на первый и второй входы блока кодирования 6.
В приемнике 5 формируются также дополнительные сигналы ″начало полосы″ и ″конец полосы″, которые формируются в маркерных резонаторах панорамного гетеродина 30, который собран на лампе обратной волны с линейно изменяющимся напряжением (см. Мартынов В.А. и др. ″Панорамные приемники и анализаторы спектра″ М.: Сов. радио, 1980 г., с. 323-329). Сигналы ″начало полосы″" и ″конец полосы″ соответствуют моментам времени нахождения панорамного гетеродина 30 в начале и конце перестраиваемой полосы несущих частот.
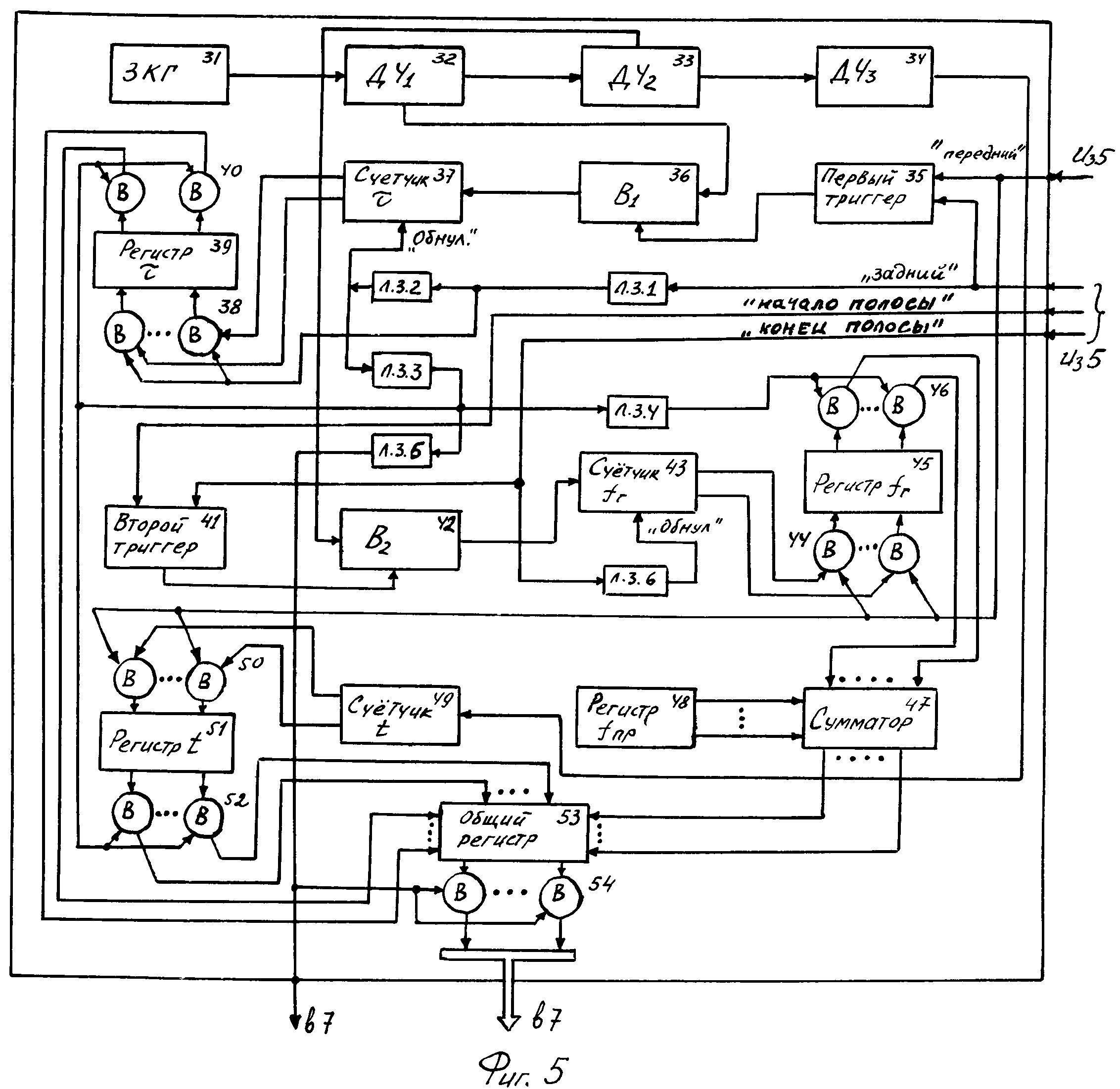
Блок кодирования 6, состав и связи которого представлены на Фиг. 5, представляет собой дискретный блок, в котором для кодирования параметров сигнала τ (длительность), f (несущая частота), t (время прихода) используется метод заполнения временного интервала импульсами эталонной частоты повторения с последующим их подсчетом, и работает следующим образом.
Задающий кварцевый генератор (ЗКГ) 31 генерирует импульсы высокой частоты повторения, которые затем делятся в делителях частоты ДУ1 32, ДУ2 33, ДУ3 34, для получения требуемой цены младшего разряда.
Кодирование длительности сигнала τ происходит следующим образом. Сигнал ″передний″, поступая из приемника 5, устанавливает первый триггер 35 в такое состояние, что вентиль В1 36 открывается и через него импульсы из ДУ1 32 поступают на счетчик τ 37 и заполняют его.
Сигнал ″задний″ устанавливает первый триггер 35 в такое состояние, что он закрывает вентиль В1 36.
Сигнал ″задний″ через линию задержки ЛЗ1 открывает группу вентилей В 38, через которые код счетчика τ 37 записывается в регистр τ 39.
Сигнал ″задний″ через ЛЗ1 и ЛЗ2 обнуляет счетчик τ 37, после чего возможно кодирование τ следующего импульса. Кодирование f происходит аналогично, но при этом используются ДУ2 33, второй триггер 41, второй вентиль В2 42, счетчик fг 43, группа вентилей В 44, регистр fг 45, группа вентилей В 46, сумматор 47 и регистр fпр 48.
Управляющими сигналами для второго триггера 41 являются сигналы ″начало полосы″ и ″конец полосы″, в сумматоре f 47 происходит определение частоты сигнала как fг+fпр.
Кодирование времени t происходит с использованием ДУ3 34, счетчика t 49. Сигнал ″передний″ поступает на группу вентилей В 50, через которые текущий код счетчика t 49 записывается в регистр t 51, а счетчик t 49 продолжает считать импульсы ДУ3 34.
Сигнал ″задний″ через ЛЗ1, ЛЗ2 и ЛЗ3 поступает на группу вентилей В 40 через которые код пропорциональный τ из регистра τ 39 записывается в общий регистр 53, а через группу вентилей В 52 код t поступает в общий регистр 53, куда поступает также код f с выхода сумматора 47.
Сигнал ″задний″ через ЛЗ1, ЛЗ2, ЛЗ3 и ЛЗ5 поступает как ″старт″ сигнал в БСИ 7, а также поступает на управляющий вход группы вентилей 54, через которую коды τ, f и t каждого обнаруженного сигнала поступают в БСИ 7.
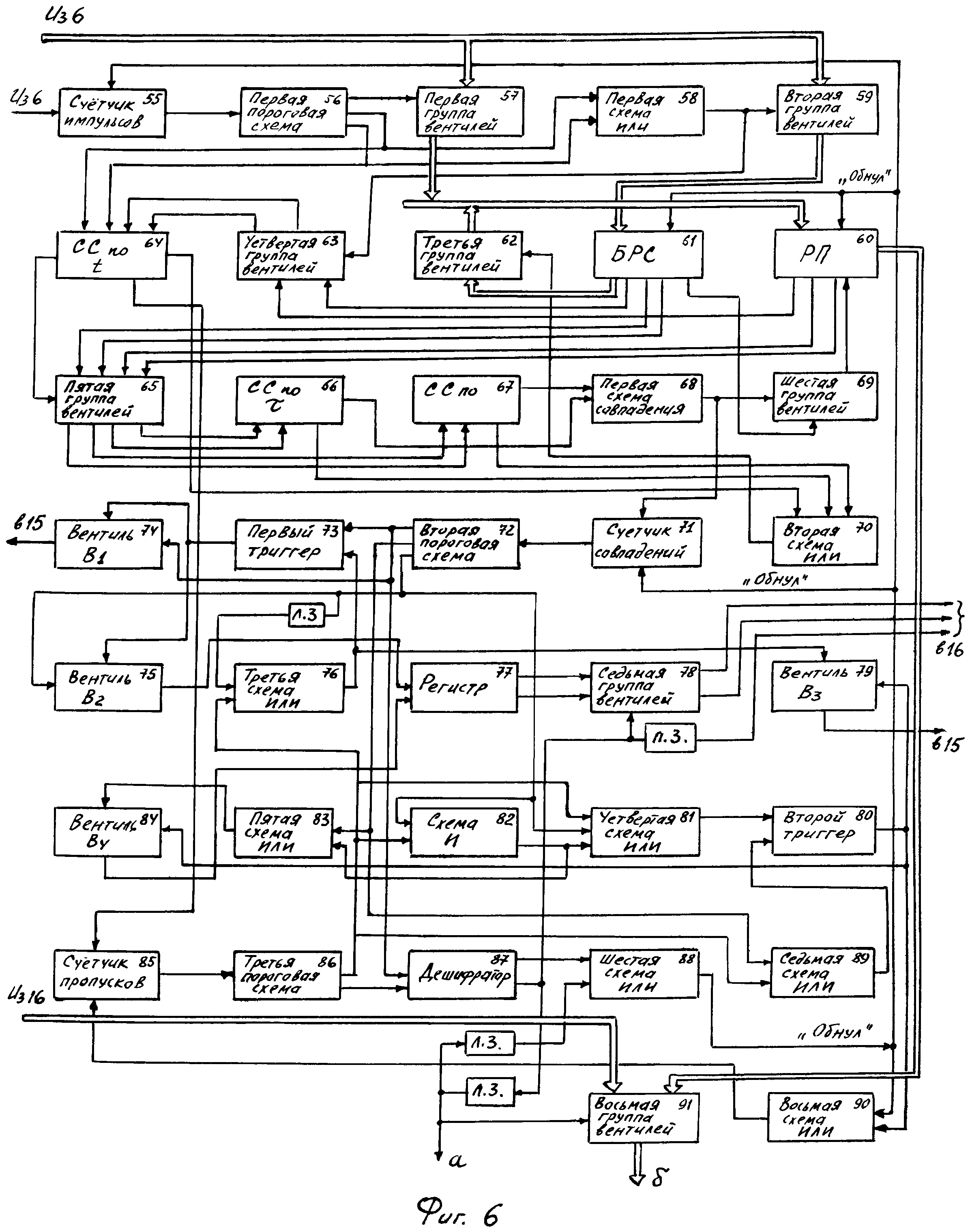
Блок селекции и индентификации (БСИ) 7, состав и связи которого представлены на Фиг. 6, 6а представляет собой дискретный блок. БСИ 7 состоит из счетчика импульсов 55, первой пороговой схемы 56, первой группы вентилей (ПГВ) 57, первой схемы ″или″ 58, второй группы вентилей 59, регистра последовательности (РП) 60, буферного регистра сигналов (БРС) 61, третьей группы вентилей (ТГВ) 62, четвертой группы вентилей (ЧГВ) 63, схемы сравнения по t (СС по t) 64, пятой группы вентилей 65, схемы сравнения по τ (СС по τ) 66, схемы сравнения по f (СС по f) 67, первой схемы совпадения 68, шестой группы вентилей (ШГВ) 69, второй схемы ИЛИ 70, счетчика совпадения 71, второй пороговой схемы 72, первого триггера 73, вентилей В1 74 и В2 75, третьей схемы ИЛИ 76, регистра признаков 77, седьмой группы вентилей (СГВ) 78, вентиля В3 79, второго триггера 80, четвертой схемы ″ИЛИ″ 81, схемы ″И″ 82, пятой схемы ИЛИ 83, вентиля В4 84, счетчика пропусков 85, третьей пороговой схемы 86, дешифратора 87, шестой схемы ИЛИ 88, седьмой схемы ИЛИ 89, восьмой схемы ИЛИ 90, восьмой группы вентилей 91, счетчика последовательностей 92, четвертой пороговой схемы 93, девятой группы вентилей 94, десятой группы вентилей 95, регистра формируемых целей (РФЦ) 96, буферного регистра последовательностей (БРП) 97, одиннадцатой группы вентилей 98, схемы сравнения по П (СС по П) 99, двенадцатой группы вентилей 100, схемы сравнения по τ, f, T (СС по τ, f, T) 101, второй схемы И 102, вентиля В5 103, девятой схемы ИЛИ 104, регистра сдвига 105, сумматора 106, тринадцатой группы вентилей 107, счетчика обнаружений 108 и четырнадцатой группы вентилей 109, при этом счетчик импульсов 55 и первая пороговая схема 56 соединены последовательно, вход счетчика импульсов 55 является входом ″старта″ из блока кодирования 6, первый выход первой пороговой схемы 56 соединен с управляющим входом первой группы вентилей 57, через которую второй вход БСИ 7 соединен с первым входом РП 60, второй и третий выходы первой пороговой схемы 56 соединены с первым и вторым входами СС по t 64 и входами первой схемы ИЛИ 58, выход которой соединен с управляющими входами ЧГВ 63 и ВГВ 59, через последнюю второй вход БСИ 7 соединен с первым входом БРС 61, первые выходы РП 60 и БРС 61 через ЧГВ 63 соединены соответственно с третьим и четвертым входами СС по t 64, первый выход которой соединен с управляющим входом пятой группы вентилей 65, второй и третий выходы РП 60 и БРС 61 через пятую группу вентилей 65 соединены с первым и вторыми входами СС по τ 66 и СС по f 67, первые выходы этих схем сравнения соединены со входами первой схемы совпадения 68, выход которой соединен с входом счетчика совпадения 71 и управляющим входом шестой группы вентилей 69, через которую четвертый выход БРС 61 соединен со вторым входом РП 60, третий выход СС по t 64 и вторые выходы СС по τ 66 и СС по f 67 соединены со входами второй схемы ИЛИ 70, выход которой соединен с управляющим входом третьей группы вентилей 62, через которую пятый выход БРС 61 соединен с первым входом РП 60, счетчик совпадения 71, вторая пороговая схема 72 и первый триггер 73 соединены последовательно, выход первого триггера 73 соединен с управляющими входами вентилей В1 74 и В2 75, выход второй пороговой схемы 72 соединен через вентиль В2 75 с первым входом регистра признаков 77, с первыми входами схемы И 82 и четвертой схемы ИЛИ 81 и через линию задержки (ЛЗ) соединен с первым входом третьей схемы ИЛИ 76, выход которой соединен со вторым входом первого триггера 73 и через вентиль В3 79, соединен с пятым выходом БСИ 7, третий выход второй пороговой схемы 72 соединен с первым входом пятой схемы ИЛИ 83, второй вход которой соединен с выходом схемы И 82, а выход пятой схемы ИЛИ 83 в через вентиль В4 84 соединен с вторым входом регистра признаков 77, первый выход второй пороговой схемы 72 через вентиль В1 соединен с шестым выходом БСИ 7 и соединен с первым входом дешифратора 87, первый выход которого соединен с первым входом шестой схемы ИЛИ 88, счетчик пропусков 85, вход которого соединен с третьим выходом СС по t 64, третья пороговая схема 86 и дешифратор 87 соединены последовательно, второй выход третьей пороговой схемы 86 соединен с первым входом седьмой схемы ИЛИ 89, вторым входом схемы И 82 и вторым входом четвертой схемы ИЛИ 81, схема И 82, четвертая схема ИЛИ 81 и второй триггер 80 соединены последовательно, выход второго триггера 80 соединен с управляющим входом вентиля В3 79, вентиля В4 84 и первым входом восьмой схемы ИЛИ 90 выход которой соединен с обнуляющим входом счетчика пропусков 85, третий выход второй пороговой схемы 72 соединен с вторым входом второго триггера 80, два выхода регистра признаков 77 через седьмую группу вентилей 78 соединены с седьмым и восьмым выходами БСИ 7, второй выход дешифратора 87 соединен с управляющим входом седьмой группы вентилей 78, через ЛЗ с девятым выходом БСИ 7, через ЛЗ с управляющим входом восьмой группы вентилей 91 через две линии задержки - с вторым входом шестой схемы ИЛИ 88, выход которой соединен со вторым входом восьмой схемы ИЛИ 90, а также - с обнуляющими входами счетчика совпадений 71, РП 60, БРС 61 счетчика импульсов 55, четвертый выход РП 60 и третий вход БСИ 7 через восьмую группу вентилей 91 поступают на входы девятой 94 и десятой группы вентилей 95, второй выход дешифратора 87 через ЛЗ соединен со входом счетчика последовательностей 92, выход которого соединен со входом четвертой пороговой схемы 93, первый выход которой соединен с управляющим входом девятой группы вентилей 94, а второй - с управляющими входами десятой группы вентилей 95 и одиннадцатой группы вентилей 98, выход девятой группы вентилей 94 соединен с входом РФЦ 96, выход десятой группы вентилей 95 соединен с первым входом БРП 97, первые выходы РФЦ 96 и БРП 97 через одиннадцатую группу вентилей 98 соединены со входами СС по П 99, первый выход которой соединен с управляющим входом двенадцатой группы вентилей 100, через которую вторые выходы РФЦ 96 и БРП 97 соединены со входами схем сравнения по τ, f, T 101, первые три выхода которого соединены с тремя входами второй схемы И 102, выход которого соединен с управляющим входом вентиля В5 103, через который первый выход БРП 97 соединен с вторым входам РФЦ 96, три вторые выхода схемы сравнения по τ, f, T 101 соединены с тремя входами девятой схемы "ИЛИ" 104, выход которой соединен с обнуляющим входом БРП 97, первый и третий выходы РФЦ 96 через тринадцатую группу вентилей 107 соединены со входами сумматора 106 и входами четырнадцатой группы вентилей 109, выход сумматора 106 соединен со входом регистра сдвига 105, выход которого соединен с третьим входом четырнадцатой группы вентилей 109, второй выход СС по П 99 соединен с управляющим входом тринадцатой группы вентилей 107 и входом счетчика обнаружений 108, выход которого соединен с четвертым входом четырнадцатой группы вентилей 109, второй выход СС по П 99 через ЛЗ соединен с управляющим входом четырнадцатой группы вентилей 109 и с обнуляющими входами счетчика последовательностей 92 и РФЦ 96, четвертый выход РФЦ 96 соединен с входами четырнадцатой группы вентилей 109, выход которой является первым выходом БСИ 7, а второй выход СС по П 99 является вторым управляющим выходом БСИ 7, второй выход четырнадцатой группы вентилей 109 является третьим выходом БСИ 7, а третий выход четырнадцатой группы вентилей 109 - четвертым выходом БСИ 7.
БСИ 7 работает следующим образом.
С выходов блока кодирования 6 коды каждого обнаруженного сигнала τ, f, t поступают на входы первой 57 и второй 59 группы вентилей, а сигнал ″старт″ поступает на счетный вход счетчика импульсов 55.
Содержимое счетчика 55 поступает на вход первой пороговой схемы 56 (которая представляет собой соединение схемы сравнения и ПЗУ, в котором прошита двойка, которая поступает на второй вход схемы сравнения, первый вход которой является входом схемы 56, а выходы схемы сравнения соответствующие логике А<2, А=2 и А>2 являются соответственно первым, вторым и третьим выходами схемы 56).
При приходе первого сигнала открывается ПГВ 57, через которую коды τ, f, t поступают в РП 60, где формируют последовательность из параметров τ, f, t=tн, t=tк, где tн, tк - соответственно время начала и конца последовательности. При приходе всех последующих сигналов открывается ВГВ 59, через которую коды τ, f, t записываются в БРС 61.
Коды t из БРС 61 и tк из РП 60 через ЧГВ 63 поступают на третий и четвертые входы СС по t 64, на первый и второй входы которого поступают сигналы соответственно со второго и третьего выходов схемы 56. СС по t 64 предназначена для формирования периодической последовательности с периодом повторения сигналов, равным Тизм, и состоит из последовательно соединенных вычитающей схемы, входы которой являются третьим и четвертым входами СС по t 64, и схемы сравнения, а также из ПЗУ констант, ОЗУ, схемы ″И″, схемы ИЛИ и семи вентилей.
Первый вход СС по t 64 соединен с управляющими входами вентилей В1 и В3, а также со входом схемы И, выход которой соединен с управляющим входом вентиля В2.
Первый и второй выходы схемы сравнения соединены со входами схемы ″ИЛИ″, выход которой соединен со вторым входом схемы И. Выход вычитающей схемы соединен через вентиль В2 со входом ОЗУ, выход которого через вентиль В4 соединен со вторым входом схемы сравнения. Код Tmax хранящийся в ПЗУ констант через В1 поступает на второй вход схемы сравнения. Второй вход СС по t 64 соединен с управляющими входами В4, В5 и В6.
Третий выход схемы сравнения соединен через В6 со вторым выходом СС по t 64, а через В3 - с третьим выходом СС по t 64.
Второй выход схемы сравнения через B5 соединен с первым выходом СС по t 64. Выходом схемы ИЛИ через В7 соединен с первым выходом СС по t 64. Управляющий вход В7 соединен с выходом схемы ″И″.
При сравнении ΔT=tк-t либо с ранее измеренным Тизм, либо ΔT=Tизм<Tmax с первого выхода СС по t 64 выдается сигнал на управляющие входы пятой группы вентилей 65, через которые значение кодов τ и f соответственно из РП 60 и БРС 61 поступают на входы схем сравнения по τ 66 и СС по f 67.
При равенстве кодов на первую схему совпадения 68 поступают два сигнала, с выхода которой поступает сигнал на управляющий вход ШГВ 69, через которую код t из БРС 61 поступает в РП 60 как tк (т.е. данный сигнал приписался к данной последовательности) и содержимое счетчика совпадения 71 увеличивается на единицу.
Если не произошло сравнение хотя бы по одному параметру τ или f, либо если ΔТ>Tmax, то с выхода второй схемы ″ИЛИ″ 70 выдается сигнал на управляющий вход третьей группы вентилей 62, через которую коды τ, f, t записываются в РП 60 как новая последовательность.
Содержимое счетчика совпадений 71 поступает на вход второй пороговой схемы 72 (которая представляет собой сборку из трех схем сравнения, первые входы которых объединены в один и являются входами схемы 72, а на вторые входы поступают соответственно константы 3, 4 и 5.
В каждой из схем сравнения используется только один выход, и потому три выхода схемы 72 соответствуют логике А=3, А=4 и А=5. При содержимом счетчика совпадений 71, равном трем, на первом выходе схемы 72 появляется сигнал, который устанавливает первый триггер 73 в такое состояние, что вентили В1 74 и В2 75 открываются.
Сигнал с первого выхода схемы 72 поступает через В1 74 на вход блока управления переключателем 15 (для включения правого парциального лепестка), а также на управляющий вход дешифратора 87.
При появлении сигнала на втором выходе схемы 72 этот сигнал через вентиль В2 75 заносит признак обнаружения в регистр признаков 77, устанавливает первый триггер 73 в исходное состояние, второй триггер 83 устанавливает в такое положение, что вентили В3 79 и В4 84 оказываются открытыми и сигнал с выхода третьей схемы ИЛИ 76 через В3 79 поступает в блок управления переключателем 15 для включения левого парциального лепестка.
При появлении сигнала на третьем выходе второй пороговой схемы 72 через В4 84 записывается сигнал в регистр признаков 77 (характеризуя признак обнаружения при работе левого парциального лепестка).
Если в СС по t 64 ΔT>Tизм, то с ее второго выхода поступает сигнал в счетчик пропусков 85, содержимое которого проверяется на третьей пороговой схеме 86 (имеющей два выхода А=1 и А>1).
Если на первом выходе третьей пороговой схемы 86 появляется сигнал (характеризующий один пропуск сигнала), то он устанавливает первый триггер 73 в исходное состояние, второй триггер 80 устанавливает в такое положение, что вентили В3 79 и В4 84 открываются, и через В3 79 поступает сигнал на блок управления переключателей 15, чтобы включить только левый парциальный лепесток.
Если появляется сигнал на втором выходе третьей пороговой схемы 86, то он поступает на второй вход дешифратора 87.
Если на управляющем входе дешифратора 87 отсутствует сигнал, то с первого выхода дешифратора 87 поступает сигнал на шестую схему ИЛИ 88, с которой выдается сигнал обнуления счетчика пропусков 85, счетчика совпадения 71, БРС 61, РП 60, счетчика импульсов 55 (это соответствует случаю несформирования последовательности).
Если на управляющем входе дешифратора 87 присутствует сигнал, то со второго выхода поступает сигнал на управляющий вход седьмой группы вентилей 78, через которую позиционный код с регистра признаков 77 поступает в блок определения пеленга последовательности 16, куда через линию задержки поступает и сигнал со второго выхода дешифратора 87, который поступает также на счетный вход счетчика последовательностей 92 и на управляющий вход восьмой группы вентилей 91, через которую коды оконченной последовательности τ, f, t, T из РП 60 и код Пi пеленга последовательности из блока 16 поступают на девятую 94 и десятую 95 группу вентилей. Содержимое счетчика последовательностей 92 проверяется на четвертой пороговой схеме 93 (аналогичная третьей пороговой схеме 86).
При приходе первой последовательности открывается девятая группа вентилей 94 и в РФЦ 96 формируется начало новой цели с параметрами τ, f, Т, Пi=Пн, Пi=Пк, где Пн и Пк - пеленги последовательностей, которые сформировали начало цели и последний приписавшейся к цели.
При приходе новых последовательностей открывается десятая группа вентилей 95 и коды последовательности записываются в БРП 97.
С первых выходов РФЦ 96 и БРП 97 коды Пн и Пi через одиннадцатую группу вентилей 98 поступают на входы СС по П 99 (которая представляет собой последовательно соединенные вычитающую схему, входы которой являются входами СС по П 99, и схему сравнения, на второй вход которой поступает код θ, равный ширине ДН, и прошит в ПЗУ, выход схемы сравнения соответствующий логике А≤θ является первым выходом СС по П 99, а соответствующий логике А>θ является вторым выходом).
Если Пi-Пн≤θ, то с первого выхода СС по П 99 выдается сигнал на управляющий вход двенадцатой группы вентилей 100, через которую коды τ, f, T соответственно из РФЦ 96 и БРП 97 поступают на входы схемы сравнения по τ, f, T 101.
Схемы сравнения по τ, f, T 101 представляют собой три отдельные сборки, каждая из которых состоит из последовательно соединенных вычитающей схемы, входы которой являются одной парой входов по определенному параметру, и схемы сравнения, на второй вход которой поступает код строба сравнения по определенному параметру, который прошит в ПЗУ констант.
Выход каждой сборки соответствующий логике А≤Б схемы сравнения является одним из трех выходов, поступающих на вторую схему И 102, сигнал с выхода которого открывает вентиль В5 103, через которой код Пi из БРП 97 поступает в РП 96 как Пк (это соответствует случаю, когда последовательность проидентифицировалась с целью).
Выходы, соответствующие логике А>Б, поступают на девятую схему ИЛИ 104, сигнал с которой обнуляет последовательность в БРП 97. Если в схеме сравнения по П 99 Пi-Пн>θ, то со второго выхода ее поступает сигнал на управляющий вход тринадцатой группы вентилей 107, через которую коды Пн и Пк из РФЦ 96 поступают на сумматор 106, с выхода которого в регистре сдвига 105 получаем код цели  . Сигнал со второго выхода СС по П 99 увеличивает содержимое счетчика обнаружений 108.
. Сигнал со второго выхода СС по П 99 увеличивает содержимое счетчика обнаружений 108.
Код ″n″ из счетчика 108, коды Пн и Пк, код Пц из регистра 105 и коды τ, f, Т, t из РФЦ 96 через четырнадцатую группу вентилей 109 поступают в ФВК 8, куда как управляющий сигнал поступает сигнал со второго выхода СС по П 99, который через линию задержки поступает для обнуления счетчика последовательностей 92, РФЦ 96 и БРП 97, коды τ, f, T поступают на индикатор 18, а коды τ, f, T, Пц поступают на ППКС 13.
Формирователь весовых коэффициентов (ФВК) 8 состоит из регистра, первой группы вентилей, вычитающей схемы, дешифратора, ПЗУ, второй группы вентилей и третей группы вентилей, при этом первый и второй выходы регистра через первую группу вентилей соединены со входами вычитающей схемы.
Вычитающая схема, дешифратор и ПЗУ соединены последовательно.
Выход ПЗУ через вторую группу вентилей соединен со вторым входом регистра, первый вход которого является первым входом ФВК 8.
Второй вход ФВК 8 является входом управляющего сигнала, который служит управляющим сигналом для всех трех групп вентилей (для второй и третьей через линии задержки). Третий выход регистра через третью группу вентилей является выходом ФВК 8.
ФВК 8 работает следующим образом.
Коды цели, обнаруженной на каждом пространственном обзоре, τ, f, T, Пц, Пн, Пк, n поступают из БСИ 7 и записываются в регистр. Коды Пн и Пк из регистра через первую группу вентилей, которые открываются управляющим сигналом, поступают на входы вычитающей схемы.
По величине разности Пн-Пк в дешифраторе определяется адрес ПЗУ, в котором прошита величина весового коэффициента К, которая записывается в регистр. Коды цели τ, f, T, t, Пц, n, К поступают в экстраполятор пеленгов 9.
Экстраполятор пеленгов 9, состав и связи которого представлены на Фиг. 7, представляет собой дискретный блок и работает следующим образом.
Коды цели τ, f, T, t, Пц, n, К на каждом пространственном поиске поступают из ФВК 8 в регистр 110. Первый сумматор 111 вычисляет сигнал ошибки по результату последнего наблюдения Пц и экстраполированному значению Пэкс. Вычисленное значение ошибки используется для получения оценки Псгл, которую выдает второй сумматор 113, на вход которого подается взвешенный с коэффициентом α сигнал ошибки, получаемый в первом умножителе 112, и экстраполированное значение Пэкс.
Четвертый сумматор 118 по результатам предыдущей оценки величины изменения пеленга и взвешенному с коэффициентом β сигналу ошибки (на втором умножителе 115) выдает текущее значение величины изменения пеленга.
Третий сумматор 114 по результатам предыдущих оценок координаты Псгл и величины изменения пеленга вычисляет экстраполированное значение Пэкс. Сглаженное значение пеленга Псгл совместно с кодами τ, f, T выдается через группу вентилей 119 в ПБП 10.
Коэффициенты α и β вычисляются в формирователе α 117 и формирователе β 116 в соответствии с выражением:
 ;
;  .
.
ПБП 10, ВБП 12 реализованы на серийно выпускаемых интегральных схемах типа К176РУ-2, представляющих собой ОЗУ на 256 бит со схемами управления.
УСПИИ 11 представляет собой дискретный блок, содержащий четыре независимых сборки и схему совпадения. Каждая из сборок состоит из вычитающей схемы, ПЗУ констант и схемы сравнения. Входы вычитающей схемы являются соответствующими входами УСПИИ 10 по каждому из параметров (τ, f, T, П).
Выход вычитающей схемы соединен с первым входом схемы сравнения, второй вход которой соединен с выходом ПЗУ констант, где прошита величина строба по каждому параметру.
В каждой схеме сравнения используется объединенный выход, соответствующий логике А≤Б (где Б - величина строба). Выходы схем сравнения соединены со входами схемы совпадения, выход которой является выходом УСПИИ 11.
Приемопередающий канал связи (ППКС) 13 представляет собой типовой канал радиосвязи, реализация которого изложена в литературе (А.С. Немировский и др. ″Системы связи и радиолинейные линии″, М., Связь, 1980 г., с. 83-150, рис. 3.6), представлена структурная схема приемопередающего канала, на которой вместо МТС (многоканальной телефонной станции) необходимо использовать БСИ как источник информации).
Группа ключей 14 реализована на типовых интегральных схемах типа 590КН10.
Блок управления переключателем 15 содержит два компаратора выполненные на интегральных микросхемах типа 521СА3. В зависимости от входных сигналов, поступающих с выходов БСИ 7, в блоке управления переключателем 15 формируется либо запирающее (отрицательнее) напряжение, либо положительное (ток в nipin диодах должен быть величиной порядка 150 мА).
Входы каждого компаратора являются входами блока 15, а выходы каждого из компараторов служат выходами блока 15 и соединены с управляющими входами переключателя 4.
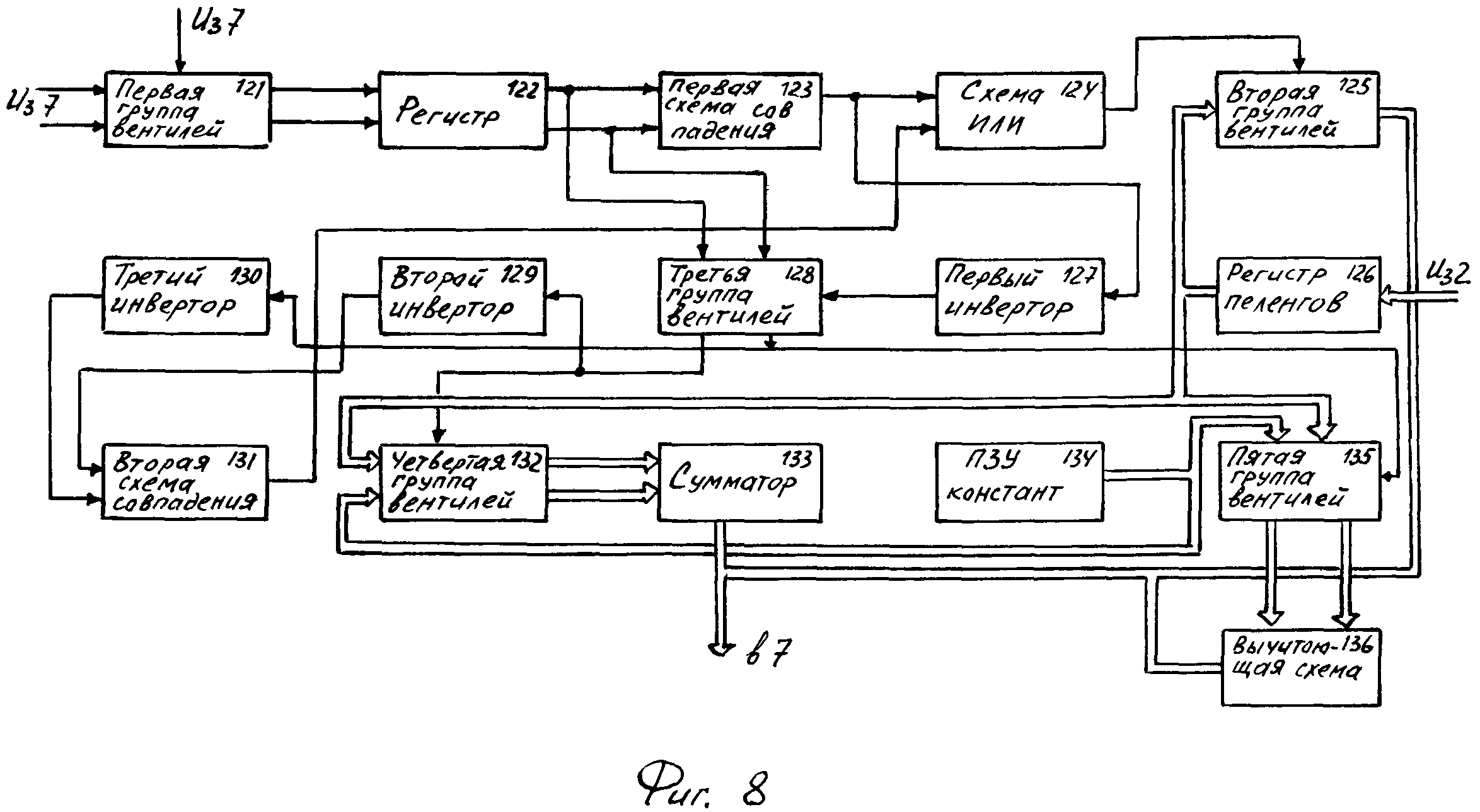
Блок определения пеленга последовательности 16, состав и связи которого представлены на Фиг. 8, работает следующим образом.
Коды признаков из БСИ 7 через первую группу вентилей 121 записываются в регистр 122, из которого они поступают на первую схему совпадения 123 и на входы третьей группы вентилей 128. Текущий код пеленга Птек из ДУПА 2 поступает в регистр пеленгов 126.
Если в регистре 122 присутствуют оба признака (т.е. обнаружение произведено и левым, и правым лепестком, то последовательности присваивается пеленг Пi=Птек, с использованием схемы ИЛИ 124 и второй группы вентилей 125. Если оба признака равны нулю то Пi=Птек, с использованием первого 127, второго 129 и третьего 130 инверторов и второй схемы совпадения 131.
Если же обнаружение произведено только левым парциальным лепестком, то открывается пятая группа вентилей 135, через которую код Птек и код поправки Δ из ПЗУ констант 134 поступают на вычитающую схему 136, с выхода которой код Пi=Птек-Δ поступает в БСИ 7 как код пеленга последовательности.
Если обнаружение произведено только правым лепестком, то открывается четвертая группа вентилей 132, через которую коды Птек и Δ поступают на сумматор 133, с выхода которого код Пi=Птек+Δ поступает в БСИ 7, как код пеленга последовательности.
Измеритель дальности 17, состав и связи которого представлены на Фиг. 9, представляет собой дискретный блок, который работает следующим образом.
Код Псг ф с четвертого выхода ПБП 10 и коды Псг кг, d, ПКФ, ПФК с пятого выхода ВБП 12 через группу ключей 14 поступают в регистр 137.
Коды Псг кг и ПКФ с первого и второго выходов регистра 137 поступают на входы первой вычитающей схемы 138, с выхода которой код Псг кг-ПКФ поступает на первый дешифратор 139, в котором определяется адрес первого ПЗУ 140, в котором прошито значение синуса данного аргумента, которое поступает на первый вход умножителя 141, на второй вход которого поступает код d с третьего выхода регистра 137.
Коды Псг ф и ПФК с четвертого и пятого выходов регистра 137 поступают на входы второй вычитающей схемы 146, с выхода которой код ПФК-Псг ф поступает на первый вход сумматора 145, на второй вход которого поступает код Псг кг-ПКФ.
С выхода сумматора 145 код Псг кг-ПКФ-Псг ф+ПФК поступает на второй дешифратор 144, в котором определяется адрес второго ПЗУ 143, в котором прошит синус данного аргумента, который поступает на первый вход делителя 142, на второй вход которого поступает код с выхода умножителя 141.
Код, пропорциональный дальности Дф ц, с выхода делителя 142 и код Псг ф с четвертого выхода регистра 137 поступают на входы индикатора 18.
Индикатор 18 представляет собой типовое индикаторное устройство радиолокационных систем, реализация которых описана в литературе (см. ″Справочник по радиолокации″ под ред. Сколника Т.Ч. М., Сов. радио, 1978 г., с. 108-115).
При разработке дискретных блоков авторы руководствовались следующими документами:
″Руководство по применению интегральных схем″ КАО 340 001Д.
″Ведомость покупных″ ГК1.000.003ВП.
″Аналоговые и цифровые интегральные схемы″ под ред. Якубовского М., Сов. радио, 1979.
″Интегральные схемы″, справочник, под ред. Тарабрина, М., Энергоатом, изд. 1985.
Для исследования точностных характеристик предложенной радиолокационной системы была разработана статистическая модель функционирования пассивной системы на ЦВМ ″БЭСМ-6″.
Результаты статистического моделирования работы предложенной пассивной системы подтвердили эффективность ее использования.
Так как источник излучения располагается на дальностях от 80 до 250 км от флагманского корабля, то при моделировании процесса затухания сигналов на трассах распространения учитывалось медианное затухание, а также быстрые и медленные флуктуации затухания сигналов в условиях дальнего тропосферного распространения радиоволн (ДТР) (Долуханов, ″Дальнее распространение ультракоротких волн″, М., Связь, 1962 г.).
Работа системы прототипа моделировалась в аналогичных условиях.
Результаты статистического моделирования приведены на Фиг. 3, где по оси абсцисс отложено значение среднеквадратической ошибки определения дальности за определенное время работы, а по оси ординат - дальность от Фк до источника излучения.
Зависимость 19 соответствует работе системы прототипа, а зависимость 20 соответствует работе предложенной пассивной системы определения координат движущихся источников излучения.
Как видно из представленных данных моделирования, на дальностях в диапазоне 80-110 км не наблюдается выигрыша в точности определения дальности.
Это обусловлено тем, что на этих дальностях обеспечивается прием по боковым лепесткам ДН антенны источника излучения, что обеспечивает хорошее заполнение ДН антенны 1 радиолокационной системы, а значит, обеспечивается высокая точность определения пеленга и дальности.
По мере увеличения дальности до цели, обнаружение излучений сигналов по боковым лепесткам уменьшается и происходит обнаружение сигналов источника излучения, излученных только по главному лепестку ДН антенны источника, что приводит к тому, что пеленг на источник излучения за пространственный обзор измеряется только по одной последовательности сигналов, излученных главным лепестком ДН антенны источника.
И в этом случае точность определения дальности предлагаемой радиолокационной системой улучшается на 25-30% по сравнению с прототипом.
Импульсный радиолокатор
Устройство автоматического измерения длительности импульса
Устройство для отождествления целей
Устройство для определения координат источника излучения
Супергетеродинный приемник импульсных сигналов с поиском по частоте
Устройство для обработки радиолокационной информации
Устройство для селекции импульсных сигналов
Устройство селекции сигналов
Устройство для временной идентификации последовательностей сигналов

