Результат интеллектуальной деятельности: ВЫСОКОТОЧНЫЙ СПОСОБ С ИСПОЛЬЗОВАНИЕМ ДВОЙНОЙ МЕТКИ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ В ШАХТЕ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к высокоточным способам с использованием двойной метки для определения местоположения, в частности к высокоточным способам с использованием двойной метки для определения местоположения движущихся объектов в шахте.
Уровень техники
В известных системах определения местоположения в шахтах, как правило, расстояние между позиционируемым объектом и базовой станцией определения местоположения определяется посредством измерения показателя уровня принимаемого сигнала (RSSI), а затем положение объекта вычисляется с использованием геометрического способа (например, методом трилатерации). Однако влияние эффекта затухания на точность измерения расстояний по показателю уровня принимаемого сигнала является очень существенным, что приводит к очень низкой точности измерения расстояний. Следовательно, при использовании в шахте систем определения местоположения, использующих единственную метку, точность измерений является очень низкой, результат определения местоположения является изменчивым, и возникают сильные отклонения определения местоположения.
Движущиеся объекты в шахтах могут быть классифицированы по их форме на два типа: первым типом движущихся объектов в шахтах являются объекты с профилем в виде полосы, параллельным плоскости выработки (например, вагонетки и врубовые машины); вторым типом движущихся объектов в шахтах являются объекты с профилем в виде полосы, перпендикулярным плоскости выработки (например, рабочие).
Раскрытие сущности изобретения
Задачей настоящего изобретения является предоставление высокоточного способа с использованием двойной метки для определения местоположения движущегося объекта в шахте, для того чтобы решить проблемы шахтной системы определения местоположения, использующую единственную метку, такие как низкую точность, изменчивый результат определения местоположения и сильные отклонения определения местоположения.
Задача настоящего изобретения решена следующим образом: высокоточный способ определения местоположения с использованием двойной метки включает в себя способ определения местоположения движущегося объекта первого типа в шахте и способ определения местоположения движущегося объекта второго типа в шахте.
Конкретно, способ включает в себя этапы, на которых: осуществляют установку двух меток определения местоположения, по горизонтали или по вертикали, на движущемся объекте и выполняют их с возможностью осуществления связи с двумя базовыми станциями определения местоположения, установленными вдоль потолка выработки, и получают местоположение движущегося объекта в реальном времени с помощью построения функции оптимизации между расстоянием, определенным по показателю уровня принимаемого сигнала, и расчетным расстоянием между меткой и базовой станцией определения местоположения и поиска минимального значения.
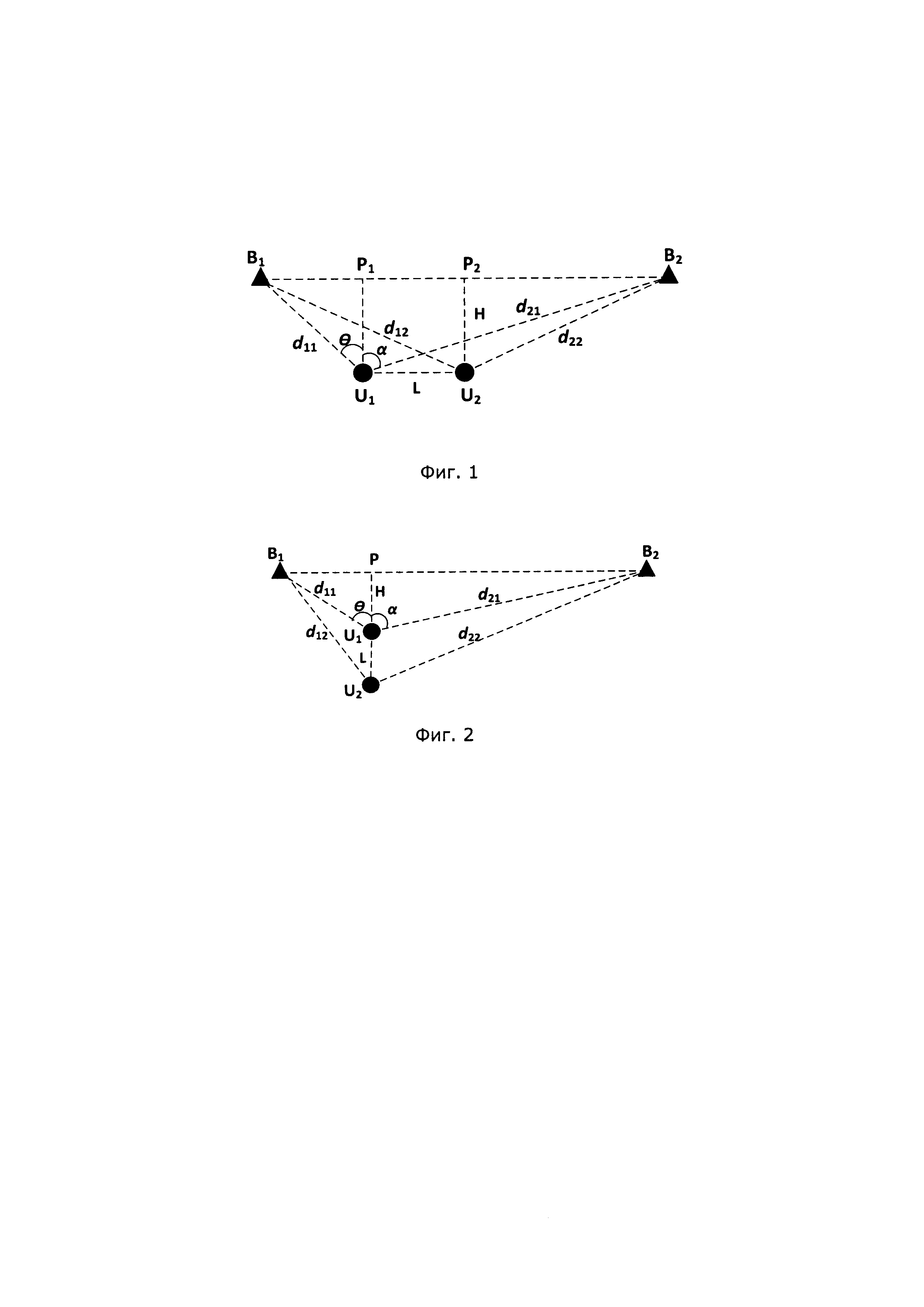
Способ определения местоположения движущегося объекта первого типа в шахте включает в себя этапы, на которых: осуществляют установку меток U1 и U2 определения местоположения на головной и хвостовой частях объекта, местоположение которого необходимо определить, соответственно, при этом расстояние между меткой U1 определения местоположения и меткой U2 определения местоположения обозначается как L, местоположение объекта в выработке может быть установлено, только если определено местоположение каждой метки, каждая метка может одновременно осуществлять связь с двумя базовыми станциями B1 и В2 определения местоположения, установленными вдоль центральной линии потолка выработки, базовые станции B1 и В2 определения местоположения соединены так, что образуют прямую линию В1В2, проекции меток U1 и U2 определения местоположения на прямой линии В1В2 обозначаются как P1 и Р2 соответственно и |U1P1|=|U2P2|=Н является высотой между меткой и центром потолка выработки; пренебрегают шириной объекта на выработке и принимают одномерную модель определения местоположения, соединяют метки U1 и U2 определения местоположения для образования прямой линии U1U2и выбирают прямую линию U1U2 в качестве горизонтальной оси, при этом горизонтальной координатой U1 является х, а горизонтальной координатой U2 является x+L; выбирают направление вверх в плоскости, продольной центру выработки, в качестве вертикальной оси; определяют значение xopt для х, которое удовлетворяет следующему уравнению, так, чтобы определить местоположение объекта:
xopt=minƒ(х),
Конкретный процесс определения местоположения с использованием способа для определения местоположения движущегося объекта первого типа в шахте включает в себя следующие этапы:
1) осуществляют установку меток U1 и U2 определения местоположения на головной и хвостовой частях объекта, местоположение которого необходимо определить;
2) осуществляют построение функции оптимизации:
координаты (xB, Н) и (xB+LB, H) базовых станций определения местоположения и расстояние |B1B2|=LB между базовыми станциями известны; предполагая, что координатами меток U1 и U2 определения местоположения являются (х, 0) и (x+L, 0) соответственно; xB≤x≤xB+LB; предполагая, что расстояниями между B1 и метками U1 и U2 определения местоположения являются d11 и d12 соответственно, а расстояниями между В2 и метками U1 и U2 определения местоположения являются d21 и d22, ∠В1U1P1=θ, ∠P1U1B2=α;
осуществляют построение функции оптимизации f(x):

целью операции возведения в квадрат и операции извлечения квадратного корня для правой части уравнения (1) является обеспечение того, чтобы каждое слагаемое было положительным, для предотвращения положительного сдвига, отрицательного для операции суммирования; где  - координаты меток Ui, i=1, 2,
- координаты меток Ui, i=1, 2,  ;
;  - координаты базовой станции Вj, j=1, 2, определения местоположения,
- координаты базовой станции Вj, j=1, 2, определения местоположения,  ; среди этих значений известны
; среди этих значений известны  , а dij могут быть определены посредством измерения показателя уровня принимаемого сигнала; величины уровня принимаемого сигнала (RSS) между узлами i и j подчиняются уравнению логнормального затухания:
, а dij могут быть определены посредством измерения показателя уровня принимаемого сигнала; величины уровня принимаемого сигнала (RSS) между узлами i и j подчиняются уравнению логнормального затухания:
где
PdBm - величина потерь мощности в тракте передачи энергии, измеренная в дБ, между принимающим узлом и передающим узлом,
 - мощность, измеренная на единичном расстоянии d0, и, как правило, d0=1 м;
- мощность, измеренная на единичном расстоянии d0, и, как правило, d0=1 м;
χ - нулевое гауссово случайное значение вследствие эффекта затенения, и им можно пренебречь в настоящих расчетах;
η - коэффициент потерь мощности сигнала в тракте; следовательно:
тогда только х является неизвестным в уравнении (1); подставляя U1, U2, B1, B2 и dij в уравнение (1), тогда:

если результат определения местоположения является несмещенной оценкой, то тогда |UiBj|=dij и ƒ(x)=0; если результат определения местоположения является смещенной оценкой, должно быть взято значение х, которое может минимизировать f(x), т.е. положение xopt объекта, местоположение которого необходимо определить, может быть определено путем решения задачи нахождения значения х, которое минимизирует f(x):
3) решают функцию оптимизации:
(1) получают начальное итерационное значение x0 с использованием способа определения местоположения, использующего единственную метку, для объекта в шахте:
sinθ=(x-xB)/d11, cosθ=H/d11, sinα=(xB+LB-x)/d21, cosα=H/d21,
cosα=H/d21, sinα=(xB+LB-x)/d21, следовательно,

для ΔB1U1B2, согласно теореме косинусов, тогда:

решают уравнение (7) с радикалом формулы для квадратичного уравнения с одним неизвестным и предполагают решение в виде начального итерационного значения x0, тогда:

где а=1, b=-(2xв+Lв),  одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
(2) получают оптимальное решение с помощью двунаправленного итерационного способа, в котором:
берут x0 в качестве исходной точки, принимают, что xi+1=xi±Δx, i=0, 1, 2, …, N, и подставляют это в уравнение (4) для решения задачи нахождения значения ƒi+1(xi) функции f(x) в i+1 шаге итерации; где N - заданное значение наибольшего числа итераций, Δх - шаг итерации; если Δх положительное, то итерирование будет выполняться в направлении B2 (т.е. итерирование в правом направлении); в противоположном случае итерирование будет выполняться в направлении B1 (т.е. итерирование в левом направлении); в начале итерирования xopt=x0; в процессе итерирования, если ƒi+1(xi)>ƒi(xi), то пусть хopt=xi+1; в противоположном случае оно оставляется неизменным; для увеличения скорости итерирования здесь используется двунаправленное итерирование; пусть 
 что соответствует итерированию в правом направлении и итерированию в левом направлении соответственно;
что соответствует итерированию в правом направлении и итерированию в левом направлении соответственно;
процесс итерирования завершается, если выполнены следующие условия: (1) весь процесс итерирования будет завершен, если количество итераций превысит пороговое значение N; (2) если  но
но  итерирование в правом направлении будет завершено, тогда как будет выполняться только итерирование в левом направлении; если
итерирование в правом направлении будет завершено, тогда как будет выполняться только итерирование в левом направлении; если  но
но  итерирование в левом направлении будет завершено, тогда как будет выполняться только итерирование в правом направлении; (3) если
итерирование в левом направлении будет завершено, тогда как будет выполняться только итерирование в правом направлении; (3) если  и
и  , весь процесс итерирования будет завершен; (4) когда ƒ(x)≤ƒth, весь процесс итерирования будет завершен, где ƒth - заданное пороговое значение ошибки расстояния.
, весь процесс итерирования будет завершен; (4) когда ƒ(x)≤ƒth, весь процесс итерирования будет завершен, где ƒth - заданное пороговое значение ошибки расстояния.
Способ определения местоположения движущегося объекта второго типа в шахте включает в себя этапы, на которых:
1) осуществляют установку меток U1 и U2 определения местоположения на головной и средней частях объекта, местоположение которого необходимо определить, и принимают, что |U1U2|=L, а расстоянием от U1 до проекции Р на В1В2 является |U1P|=H, |B1B2|=LB;
2) строят функцию оптимизации, при этом положением объекта, местоположение которого необходимо определить, является xopt=minƒ(x);
3) находят оптимальное решение:
(1) используя

для нахождения начального итерационного значения,
где а=1, b=-(2xB+LB),  ; одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
; одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
(2) получают оптимальное решение xopt с помощью двунаправленного итерационного способа.
Положительные эффекты
По указанной выше схеме устанавливают две метки определения местоположения, по горизонтали или по вертикали, на движущемся объекте, и выполняют их с возможностью осуществления связи с двумя базовыми станциями определения местоположения, установленными вдоль потолка выработки, и получают местоположение движущегося объекта в реальном времени с помощью построения функции оптимизации между расстоянием, определенным по показателю уровня принимаемого сигнала, и расчетным расстоянием между меткой и базовой станцией определения местоположения и поиска минимального значения. Функцию оптимизации определяют с помощью процесса итераций, включая этап, на котором определяют начальное итерационное значение и шаг итерации в левом/правом направлении. Способ преодолевает существенный недостаток определения местоположения, использующего единственную метку, т.е. высокую восприимчивость к факторам окружающей среды в шахте, и замечательно повышает точность определения местоположения. Две или даже более метки определения местоположения могут быть установлены на оборудовании и персонале для повышения точности определения местоположения с использованием пространственного ограничения между метками. Способ решает проблемы низкой точности, изменчивого результата определения местоположения и сильных отклонений определения местоположения, присущих шахтным системам определения местоположения, использующих единственную метку, и достигает цели настоящего изобретения.
Преимущества
Настоящее изобретение использует способ с двумя сметками для определения местоположения движущихся объектов в шахте. С помощью способа, раскрытого в настоящем изобретении, точность определения местоположения может быть замечательно улучшена простым добавлением метки определения местоположения на объект, местоположение которого необходимо определить. Таким образом, цена усовершенствования низка, а ввод в действие легок. Способ применим для определения местоположения объектов с профилем в виде полосы, параллельным плоскости выработки (например, шахтная тележка или врубовая машина), или объектов с профилем в виде полосы, перпендикулярным плоскости выработки (например, рабочий).
Краткое описание чертежей
На Фиг. 1 представлена принципиальная схема определения местоположения с использованием двух меток движущегося объекта первого типа в шахте в соответствии с настоящим изобретением.
На Фиг. 2 представлена принципиальная схема определения местоположения с использованием двух меток движущегося в шахте объекта второго типа в соответствии с настоящим изобретением.
Осуществление изобретения
Первый вариант реализации
Высокоточный способ определения местоположения с использованием двойной метки включает в себя способ определения местоположения движущегося объекта первого типа шахте и способ определения местоположения движущегося объекта второго типа в шахте; конкретно, способ включает в себя этапы, на которых: осуществляют установку двух меток определения местоположения, по горизонтали или по вертикали, на движущемся объекте и выполняют их с возможностью осуществления связи с двумя базовыми станциями определения местоположения, установленными вдоль потолка выработки, и получают местоположение движущегося объекта в реальном времени с помощью построения функции оптимизации между расстоянием, определенным по показателю уровня принимаемого сигнала, и расчетным расстоянием между меткой и базовой станцией определения местоположения и поиска минимального значения.
Способ определения местоположения движущегося объекта первого типа в шахте включает в себя этапы, на которых: осуществляют установку меток U1 и U2 определения местоположения на головной и хвостовой частях объекта, местоположение которого необходимо определить, соответственно, при этом расстояние между меткой U1 определения местоположения и меткой U2 определения местоположения обозначается как L, местоположение объекта в выработке может быть установлено, только если определено местоположение каждой метки, каждая метка может одновременно осуществлять связь с двумя базовыми станциями B1 и В2 определения местоположения, установленными вдоль центральной линии потолка выработки, базовые станции B1 и B2 определения местоположения соединены так, что образуют прямую линию В1В2, проекции меток U1 и U2 определения местоположения на прямой линии В1В2 обозначаются как P1 и Р2 соответственно и |U1P1|=|U2P2|=Н является высотой между меткой и центром потолка выработки; пренебрегают шириной объекта на выработке и принимают одномерную модель определения местоположения, соединяют метки U1 и U2 определения местоположения для образования прямой линии U1U2, и выбирают прямую линию U1U2 в качестве горизонтальной оси, при этом горизонтальной координатой U1 является х, а горизонтальной координатой U2 является x+L; выбирают направление вверх в плоскости, продольной центру выработки, в качестве вертикальной оси; решают задачу определения значения xopt для x, которое удовлетворяет следующему уравнению, так, чтобы определить местоположение объекта:
xopt=minƒ(x).
Конкретный процесс определения местоположения с использованием способа для определения местоположения движущегося объекта первого типа в шахте включает в себя следующие этапы:
1) осуществляют установку меток U1 и U2 определения местоположения на головной и хвостовой частях объекта, местоположение которого необходимо определить;
2) осуществляют построение функции оптимизации:
координаты (хB, H) и (xB+LB, Н) базовых станций определения местоположения и расстояние |B1B2|=LB между базовыми станциями известны; предполагая, что координатами меток U1 и U2 определения местоположения являются (х, 0) и (х+L, 0) соответственно; хB≤х≤хB+LB, предполагая, что расстояниями между B1 и метками U1 и U2 определения местоположения являются d11 и d12 соответственно, а расстояниями между B2 и метками U1 и U2 определения местоположения являются d21 и d22, ∠B1U1P1=θ, ∠P1U1B2=α;
осуществляют построение функции оптимизации f(x):

целью операции возведения в квадрат и операции извлечения квадратного корня для правой части уравнения (1) является обеспечение того, чтобы каждое слагаемое было положительным, для предотвращения положительного сдвига, отрицательного для операции суммирования; где  - координаты меток и Ui, i=1, 2,
- координаты меток и Ui, i=1, 2,  ;
;  - координаты базовой станции Bj, j=1, 2, определения местоположения,
- координаты базовой станции Bj, j=1, 2, определения местоположения,  ; среди этих значений известны
; среди этих значений известны  , а dij могут быть определены посредством измерения показателя уровня принимаемого сигнала; величины уровня принимаемого сигнала (RSS) между узлами i и j подчиняются уравнению логнормального затухания:
, а dij могут быть определены посредством измерения показателя уровня принимаемого сигнала; величины уровня принимаемого сигнала (RSS) между узлами i и j подчиняются уравнению логнормального затухания:
где
PdBm - величина потерь мощности в тракте передачи энергии, измеренная в дБ, между принимающим узлом и передающим узлом,
 - мощность, измеренная на единичном расстоянии d0, и, как правило, d0=1 м;
- мощность, измеренная на единичном расстоянии d0, и, как правило, d0=1 м;
χ - нулевое гауссово случайное значение вследствие эффекта затенения, и им можно пренебречь в настоящих расчетах;
η - коэффициент потерь мощности сигнала в тракте; следовательно,
тогда только х является неизвестным в уравнении (1); подставляя U1, U2, В1, B2 и dij в уравнение (1), тогда:

если результат определения местоположения является несмещенной оценкой, то тогда |UiBj|=dij и ƒ(x)=0; если результат определения местоположения является смещенной оценкой, должно быть взято значение х, которое может минимизировать f(x), т.е. положение xopt объекта, местоположение которого необходимо определить, может быть определено путем решения задачи нахождения значения х, которое минимизирует f(x):
3) решают функцию оптимизации:
(1) получают начальное итерационное значение x0 с использованием способа определения местоположения, использующего единственную метку, для объекта в шахте.
Как видно из Фиг. 1, sinθ=(x-xB)/d11, cosθ=H/d11, sinα=(xB+LB-x)/d21, cosα=H/d21,
cosα=H/d21, sinα=(xB+LB-x)/d21, следовательно,

для ΔB1U1B2, согласно теореме косинусов, тогда:

решают уравнение (7) с радикалом формулы для квадратичного уравнения с одним неизвестным и предполагают решение в виде начального итерационного значения x0, тогда:

где а=1, b=-(2хB+LB),  одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
(2) получают оптимальное решение с помощью двунаправленного итерационного способа, в котором:
берут x0 в качестве исходной точки, принимают, что хi+1=хi±Δх, i=0, 1, 2, …, N, и подставляют это в уравнение (4) для решения задачи нахождения значения ƒi+1(xi) функции f(x) в i+1 шаге итерации; где N - заданное значение наибольшего числа итераций, Δx - шаг итерации; если Δх положительное, то итерирование будет выполняться в направлении B2 (т.е. итерирование в правом направлении); в противоположном случае итерирование будет выполняться в направлении B1 (т.е. итерирование в левом направлении); в начале итерирования xopt=x0, в процессе итерирования, если ƒi+1(x1)>ƒi(xi), то пусть хopt=xi+1, в противоположном случае оно оставляется неизменным; для увеличения скорости итерирования здесь используется двунаправленное итерирование; пусть  что соответствует итерированию в правом направлении и итерированию в левом направлении соответственно;
что соответствует итерированию в правом направлении и итерированию в левом направлении соответственно;
процесс итерирования завершается, если выполнены следующие условия: (1) весь процесс итерирования будет завершен, если количество итераций превысит пороговое значение N; (2) если , но
, но  , итерирование в правом направлении будет завершено, тогда как будет выполняться только итерирование в левом направлении; если
, итерирование в правом направлении будет завершено, тогда как будет выполняться только итерирование в левом направлении; если  но
но  итерирование в левом направлении будет завершено, тогда как будет выполняться только итерирование в правом направлении; (3) если
итерирование в левом направлении будет завершено, тогда как будет выполняться только итерирование в правом направлении; (3) если  и
и  , весь процесс итерирования будет завершен; (4) когда ƒ(x)≤ƒth, весь процесс итерирования будет завершен, где ƒth - заданное пороговое значение ошибки расстояния.
, весь процесс итерирования будет завершен; (4) когда ƒ(x)≤ƒth, весь процесс итерирования будет завершен, где ƒth - заданное пороговое значение ошибки расстояния.
Способ определения местоположения движущегося объекта второго типа в шахте включает в себя этапы, на которых:
1) осуществляют установку меток U1 и U2 определения местоположения на головной и средней частях объекта, местоположение которого необходимо определить, и принимают, что |U1U2|=L, а расстоянием от U1 до проекции Р на В1В2 является |U1P|=H, |B1B2|=LB;
2) строят функцию оптимизации, при этом положением объекта, местоположение которого необходимо определить, является xopt=minƒ(x).
3) находят оптимальное решение:
(1) используя

для нахождения начального итерационного значения,
где a=1, b=-(2xB+LB),  одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
одно из решений может быть отброшено согласно с xB≤x≤xB+LB, так что получается единственное начальное итерационное значение;
(2) получают оптимальное решение xopt с помощью двунаправленного итерационного способа.












Устройство и способ мониторинга отделительного слоя кровли на основе волоконной решетки в горной разработке
Способ трехуровневого подавления пульсаций вращающего момента четырехфазного вентильного реактивного электродвигателя
Машина для выемки материала из шахтной вагонетки, выполненная на основе подъемного механизма со стальным канатом
Способ диагностирования по току шины короткого замыкания в цепи преобразователя мощности вентильного реактивного электродвигателя
Способ отказоустойчивого управления датчиком положения вентильного реактивного электродвигателя
Способ двухуровневого подавления пульсаций крутящего момента трехфазного вентильного реактивного электродвигателя
Способ перекрестного управления в широком диапазоне скоростью вентильного реактивного электродвигателя
Шахтная мешалка для пенистой суспензии
Система динамического контроля отделения кровли выработки на основе волоконных решеток и способ предварительного оповещения
Способ горной разработки с закладкой с установлением контакта с кровлей и сохранением воды для контроля трещин перекрывающего слоя и проседания поверхности
Устройство и способ мониторинга отделительного слоя кровли на основе волоконной решетки в горной разработке
Способ трехуровневого подавления пульсаций вращающего момента четырехфазного вентильного реактивного электродвигателя
Машина для выемки материала из шахтной вагонетки, выполненная на основе подъемного механизма со стальным канатом
Способ диагностирования по току шины короткого замыкания в цепи преобразователя мощности вентильного реактивного электродвигателя
Способ отказоустойчивого управления датчиком положения вентильного реактивного электродвигателя
Способ двухуровневого подавления пульсаций крутящего момента трехфазного вентильного реактивного электродвигателя
Способ перекрестного управления в широком диапазоне скоростью вентильного реактивного электродвигателя
Шахтная мешалка для пенистой суспензии
Система динамического контроля отделения кровли выработки на основе волоконных решеток и способ предварительного оповещения
Способ горной разработки с закладкой с установлением контакта с кровлей и сохранением воды для контроля трещин перекрывающего слоя и проседания поверхности

