Результат интеллектуальной деятельности: СООСНАЯ НЕСУЩАЯ СИСТЕМА
Вид РИД
Изобретение
Изобретение относится к авиационной технике и может быть использовано в вертолетостроении.
Известна соосная несущая система, содержащая редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей, при этом поводки лопастей втулки верхнего винта связаны с верхним автоматом перекоса через качалки, смонтированные на ползушке, расположенной над втулкой верхнего винта, поводки лопастей втулки нижнего винта соединены тягами непосредственно с нижним автоматом перекоса, радиусы поводков на втулке верхнего винта выполнены меньшими, чем на втулке нижнего винта, нижний автомат перекоса связан с системами управления общим и циклическим шагом посредством трех тяг, а ползушка связана с системой управления дифференциальным шагом верхнего винта посредством тяги, расположенной внутри вала верхнего винта (см. патент РФ на полезную модель №147490, опубл. 10.11.2014 г.).
Известна другая соосная несущая система, в которой отсутствует указанный недостаток, так как управление несущими винтами осуществляется без применения тяг, проходящих внутри вала верхнего винта - патент РФ на изобретение №2307766, опубл. 10.10.2007 г.
Указанная соосная несущая система является наиболее близким прототипом к предложенному техническому решению.
Эта соосная несущая система, содержащая редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей и суммирующей рычажной системой общего и дифференциального шага, отличается тем, что втулки несущих винтов выполнены двухлопастными с общими горизонтальными шарнирами, поводки лопастей втулки нижнего винта связаны с нижним автоматом перекоса через качалки, смонтированные на расположенной под втулкой нижнего винта ползушке, а поводки лопастей втулки верхнего винта соединены тягами непосредственно с верхним автоматом перекоса, при этом радиусы поводков на втулке верхнего винта выполнены большими, чем на втулке нижнего винта, а нижний автомат перекоса и ползушка кинематически связаны с системой управления общим и дифференциальным шагом через суммирующую рычажную систему, в которой один рычаг связан одним плечом с управлением дифференциальным шагом, а вторым - с ползушкой, а второй рычаг, шарнирно закрепленный на первом, соединен своими плечами с управлением общим шагом и с ползуном нижнего автомата перекоса.
Недостатком указанной несущей системы является сложность суммирующей рычажной системы с двумя качалками, ползуном и ползушкой, что увеличивает количество шарниров и расстояние между корпусом редуктора и нижним винтом, и для беспилотного варианта ведет к снижению надежности, росту габаритов и веса несущей системы.
Технической задачей настоящего изобретения является повышение надежности соосной несущей системы за счет упрощения конструкции, повышения жесткости проводки управления к верхнему винту, снижения трудоемкости обслуживания за счет уменьшения количества кинематических элементов между верхним автоматом перекоса и верхним несущим винтом.
Эта цель достигается тем, что в соосной несущей системе, содержащей редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей и суммирующей рычажной системой общего и дифференциального шага, нижний автомат перекоса установлен на ползуне и взаимодействует с ним и поводками нижнего винта через рычажные качалки, нижний автомат перекоса и ползун постоянно соединены шарнирно с исполнительными органами механических приводов, управляющие входы которых подключены к сигналам траекторного управления полетом вертолета от системы автоматического управления, а на период пилотируемой отработки и опционального пилотируемого применения они соединены также со съемной функционально-связанной системой тяг и рычагов ручного пилотажного управления. В зависимости от конструктивных особенностей конкретной несущей системы радиусы поводков на втулке верхнего винта выполняются большими, чем на втулке нижнего винта, или одинаковыми при соответствующей программной компенсации системы управления. Съемная функционально-связанная система тяг и рычагов ручного пилотажного управления может выполняться по любой известной схеме.
Не вращающаяся часть нижнего автомата перекоса в зависимости от конструктивной реализации соединена с тремя/четырьмя исполнительными органами механических приводов общего и циклического шага в равноудаленных по окружности точках, а ползун соединен с исполнительным органом механического привода дифференциального шага.
При этом механические приводы в зависимости от размерности вертолета могут быть выполнены в виде электроприводов с поворотным или поступательным перемещением исполнительных органов, а также гидроприводов или электрогидроприводов с поворотным или поступательным перемещением исполнительных органов.
Изобретение поясняется чертежами, где схематически изображены:
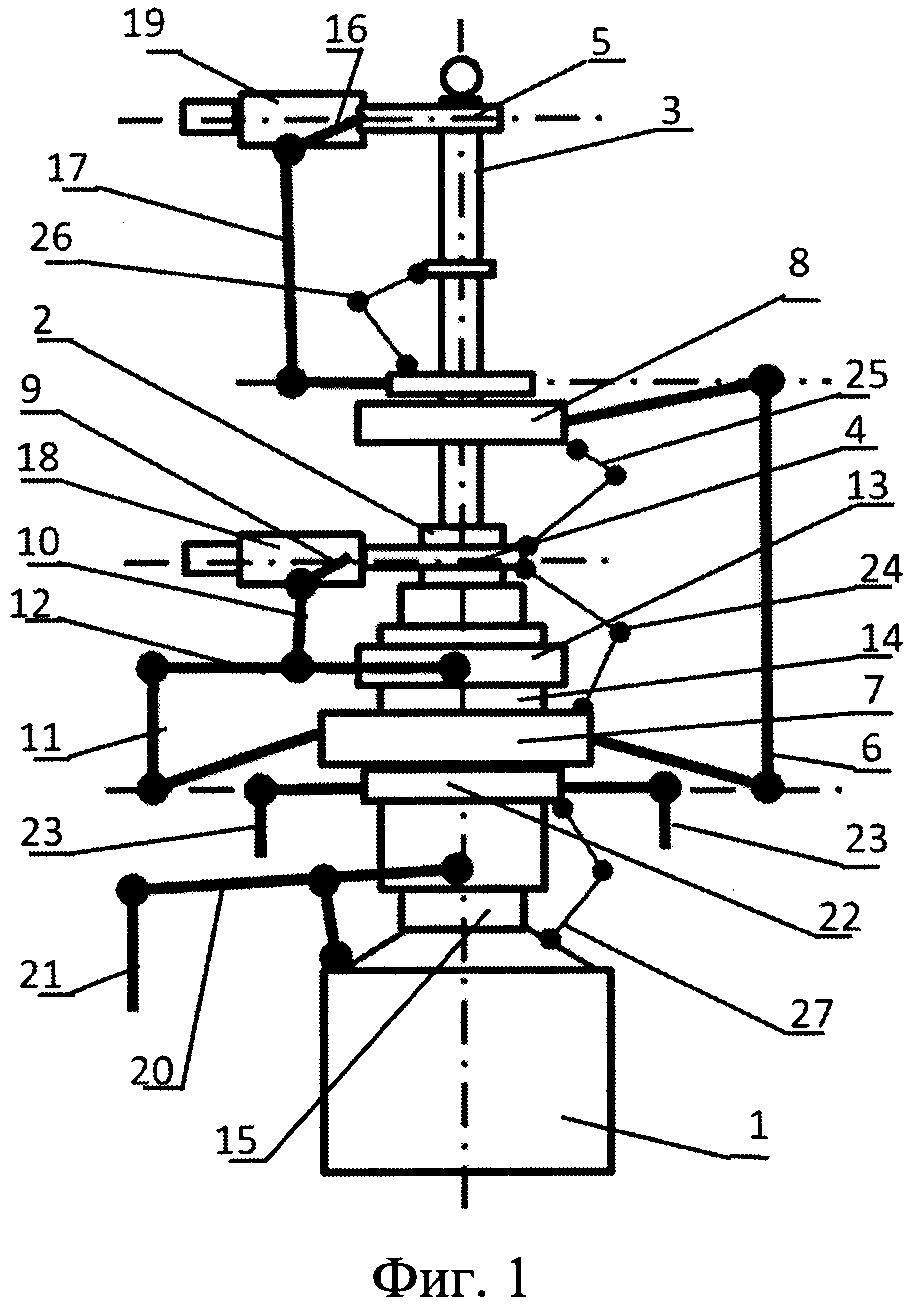
на фиг. 1 - предлагаемая соосная несущая система;
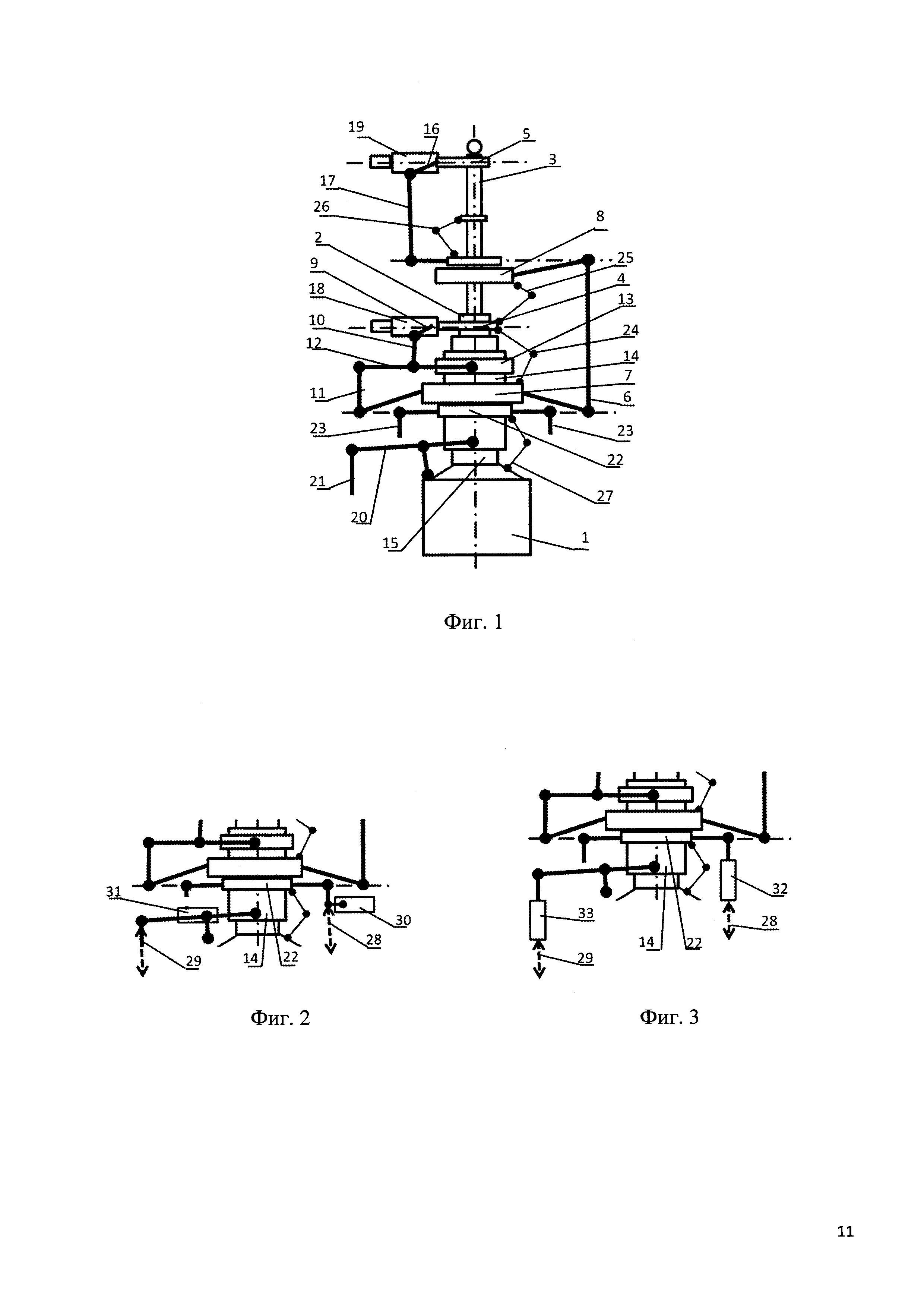
на фиг. 2 - вариант размещения исполнительных механизмов в виде электроприводов с силовым выходом поворотного перемещения;
на фиг. 3 - вариант размещения исполнительных механизмов в виде гидроприводов или электрогидроприводов с силовым выходом поступательного перемещения.
Соосная несущая система состоит из редуктора 1 с двумя валами 2 и 3 противоположного вращения, на которых смонтированы втулки несущих винтов 4 и 5, на которые устанавливаются лопасти.
Втулки несущих винтов 4 и 5 могут быть выполнены двухлопастными с общими горизонтальными шарнирами или многолопастными.
Двухлопастные винты выполняются также без вертикальных шарниров, что значительно упрощает конструкцию втулок несущих винтов.
Система управления несущими винтами содержит два соединенных между собой тягами 6 и подвижных в осевом направлении автомата перекоса 7 и 8.
Поводки лопастей 9 втулки нижнего винта 4 связаны с нижним автоматом перекоса 7 тягами 10, 11 через качалки 12, смонтированные на вращающемся кольце 13 ползуна 14, установленного на стакане 15 редуктора 1.
Поводки лопастей 16 втулки верхнего винта 5 соединены тягами 17 непосредственно с верхним автоматом перекоса 8.
Одинаковые величины передаточных отношений между осевыми шарнирами 18 и 19 втулок несущих винтов 4 и 5 и автоматами перекоса 7 и 8 могут обеспечиваться или выполнением радиусов поводков 16 на втулке верхнего винта большими, чем на поводках 9 втулки нижнего винта, или соответствующей программой, обеспечивающей управление таким образом, чтобы при даче общего или циклического шага изменение углов установки на верхнем и на нижнем винте происходило на одинаковые величины.
Нижний автомат перекоса 7 и ползун 14 связаны с системой управления общим и дифференциальным шагом через суммирующую рычажную систем. Система включает качалки 12, закрепленные одним концом шарнирно на вращающемся кольце 13 ползуна 14, который с другой стороны соединен рычагом 20 с исполнительным органом 21 механизма управления дифференциальным шагом.
Другие концы качалок 12 соединены шарнирно тягами 11 с наружным кольцом нижнего автомата перекоса 7, а его внутреннее кольцо 22 соединено шарнирно с тремя или четырьмя исполнительными органами 23 механизмов общего и циклического шага.
Наружные кольца автоматов перекоса 7 и 8 соединены шлиц-шарнирами 24 и 25 с корпусом втулки нижнего винта 4.
Одна из тяг 11 выполнена в виде поводка, способного передавать усилие в плоскости вращения от наружного кольца нижнего автомата перекоса 7 на качалку 12.
Внутреннее кольцо автомата перекоса 8 связано шлиц-шарниром 26 с валом 3.
Внутреннее не вращающееся кольцо автомата перекоса 7 связано шлиц-шарниром 27 с корпусом 1.
При работе валы 2 и 3 редуктора 1 с установленными на них несущими винтами вращаются в разные стороны, при этом наружные кольца автоматов перекоса 7 и 8 через шлиц-шарниры 24 и 25, а качалки 12 через тяги 11 связаны с нижним несущим винтом и вращаются с ним в одну сторону, например против часовой стрелки, а внутреннее кольцо автомата перекоса 8, будучи связано шлиц-шарниром 26 с валом 3, вращается с этим валом и верхним несущим винтом в противоположную сторону, т.е. по часовой стрелке.
Шлиц-шарнир 27 препятствует закручиванию силовых органов 23 исполнительных механизмов общего и циклического шага вокруг ползуна 14.
Управление общим и/или циклическим шагом осуществляется путем осевых перемещений автоматов перекоса 7 и синхронного с ними ползуна 14 и/или наклона автоматов перекоса соответствующим перемещением тремя или четырьмя исполнительными органами 23 механизмов общего и циклического шага от системы управления вертолета. При этом циклическое изменение углов установки лопастей нижнего винта 4 производится от автомата перекоса 7 тягами 10 и 11 через качалки 12. Изменение углов установки на верхнем винте 5 от автомата перекоса 8 осуществляется непосредственно тягами 17, а так как величины передаточных отношений между осевыми шарнирами и автоматами перекоса подобраны кинематически или программно одинаковыми, то циклические изменения углов установки на одинаковых азимутах обоих винтов будут одинаковыми.
Управление дифференциальным шагом, т.е. изменение углов установки (шага) лопастей, осуществляется за счет осевого перемещения ползуна 14 исполнительным органом 21. При этом уменьшение/увеличение угла установки лопастей нижнего винта 4 автоматически компенсируется соответствующим увеличением/уменьшением общего шага перемещением исполнительных органов 23 механизмов общего и циклического шага, подключенных своими входами к сигналам траекторного управления полетом от системы автоматического управления вертолетом.
Не вращающаяся часть нижнего автомата перекоса 22, в зависимости от конструкции вертолета, постоянно соединена с тремя или четырьмя исполнительными органами 23 механических приводов общего и циклического шага в равноудаленных по окружности точках, а ползун постоянно соединен с исполнительным органом механического привода 21 дифференциального шага.
На период пилотируемой отработки и опционального пилотируемого применения вертолетов взлетным весом свыше 350…400 кг они соединяются также со съемной функционально-связанной системой тяг и рычагов ручного пилотажного управления: тягами 28 с ручкой управления общим и циклическим шагами, рычагом шаг-газ, а тягой 29 (фиг. 2 и 3) с педалями путевого управления. В этом случае перемещения органов ручного пилотирования в полете через датчики обратной связи приводов в виде цифровых сигналов траекторного управления передаются в систему автоматического управления вертолета для запоминания и выработки типовых законов управления. Для беспилотных вертолетов с взлетным весом менее 350 кг типовые законы управления уровнями входных сигналов механизмов 21 и 23 определяются расчетным путем и уточняются по результатам летных испытаний вертолета на привязи.
Механические приводы могут быть выполнены в виде электроприводов с поворотным 30 и 31 (фиг. 2) или поступательным 32 и 33 (фиг. 3) перемещением исполнительных органов.
Механические приводы могут быть также выполнены в виде гидроприводов или электрогидроприводов с поворотным или поступательным перемещением исполнительных органов 32 и 33 (фиг. 3).
Согласно изобретению постоянное программное подключение исполнительных органов канала дифференциального шага к сигналам траекторного управления полетом вертолета от системы автоматического управления, а также кинематическое объединение ползуна с ползушкой в единую конструкцию, уменьшает количество шарниров, диаметр нижнего автомата перекоса, расстояние между корпусом редуктора и нижним винтом, и для беспилотного варианта ведет к снижению габаритов и веса несущей системы.
Предложенная соосная несущая система позволяет выполнить систему управления беспилотных и опционально пилотируемых вертолетов более простой и надежной, а уменьшение количества конструктивных элементов повышает жесткость проводки управления и снижает трудозатраты на обслуживание.
Втулка винта вертолета
Трансмиссия вертолёта
Беспилотный вертолет
Микро-опто-электро-механический датчик угловой скорости на основе волнового твердотельного гироскопа с кольцевым резонатором и оптического туннельного эффекта
Втулка винта вертолета
Трансмиссия вертолёта
Беспилотный вертолет
Микро-опто-электро-механический датчик угловой скорости на основе волнового твердотельного гироскопа с кольцевым резонатором и оптического туннельного эффекта
Автоматический беспилотный комплекс диагностики протяженных объектов, оснащенных собственной информационной системой
Устройство предупреждения сближения лопастей несущих винтов соосного вертолета

