Результат интеллектуальной деятельности: Способ измерения абсолютного положения конечного звена многозвенного механизма промышленного робота
Вид РИД
Изобретение
Изобретение относится к способам управления положением конечного звена многозвенного механизма, промышленного робота.
Известен способ контроля точности контурных перемещений робота, включающий использование измерительной головки, установленной с возможностью перемещения роботом, эталона с системой фиксации и датчиков линейных перемещений, два из которых установлены на измерительной головке, а третий - на эталоне, и регистрирующую аппаратуру, связанную с датчиками (см. SU №1481060, B25J 19/00, 11/00, 1989).
К недостаткам известного устройства относятся невозможность обеспечения измерения по всей рабочей зоне манипулятора, низкая точность измерений вследствие невозможности измерений отклонения запрограммированной траектории робота по всем трем координатам, т.к. в измерительной головке располагаются только два датчика линейных перемещений (датчик, установленный на эталоне, способен измерять только точность прихода робота в конечную точку траектории), а также низкая оперативность работы, т.к. требуются многократные измерения при различных положениях эталона.
Известен способ контроля точности контурных перемещений промышленного робота, включающий закрепление на фланце его последнего звена калибровочного инструмента, оканчивающегося сферой, и использование в качестве измерительной аппаратуры оптической измерительной системы с видеокамерой, подключенной через аналого-цифровой преобразователь к персональному компьютеру, установленной с возможностью захвата всей рабочей зоны манипулятора, при этом значение диаметра сферы занесено в память персонального компьютера, а система управления манипулятором промышленного робота запрограммирована с возможностью изменения ориентации калибровочного инструмента в пространстве на максимально возможные углы, обусловленные кинематической схемой манипулятора, при размещении сферы калибровочного инструмента в разных секторах рабочей зоны манипулятора (см. RU №2472612, B25J 19/00, 2013).
К недостаткам известного устройства относятся необходимость применения камер, имеющих большое разрешение, низкая точность, а также уменьшение точности измерения при увеличении величины рабочей зоны, тем более что измерения ведут по одной точке (сфере).
Известен также способ измерения абсолютного положения конечного звена многозвенного механизма промышленного робота при помощи отслеживания одной или двумя неподвижными видеокамерами световых или отражающих меток, установленных на его звене, с последующей триангуляцией положения меток и пересчета положения звена механизма с использованием уравнений обратной кинематики (http://www.delcam-ural.ru/delkam_ural/cai/metronor., 20.12.2008 г. [00:08:11] MCK).
Недостатками такого способа являются: необходимость применения камер, имеющих большое разрешение, низкая точность (максимум около 0,3 мм на размерах в несколько метров), а также уменьшение точности измерения при увеличении величины рабочей зоны. Также недостатком является низкое быстродействие системы (примерно 0,3 Герц), препятствующее использованию полученного сигнала положения выходного звена в быстродействующей системе управления робота. Все это снижает эффективность работы промышленного робота.
Задача, на решение которой направлено заявленное решение, выражается в повышении эффективности работы промышленного робота.
Техническими результатами заявленного способа является повышение точности при увеличении рабочей зоны (удалении экрана от источника света) вследствие большого радиуса описываемого лучом источника света при угловом перемещении, характерном для многозвенных механизмов, что ведет к пропорционально увеличенной «отрисовке» траектории луча на экране. Повышается быстродействие (за счет высокой контрастности светового пятна на экране, позволяющей выделять точечный объект с минимальным объемом вычислений).
Указанный технический результат достигается тем, что способ определения абсолютного положения конечного звена многозвенного механизма промышленного робота, включающий использование двух неподвижных видеокамер и вычисление положения звена механизма с использованием уравнений обратной кинематики, отличается тем, что за пределами рабочей зоны многозвенного механизма промышленного робота размещают как минимум два взаимно перпендикулярных экрана, а на его конечном звене устанавливают разнесенные источники когерентного излучения с обеспечением видимости в каждый момент времени световых пятен минимум двух источников на взаимно перпендикулярных экранах, при этом видеокамеры располагают с возможностью обзора всей площади экрана, с их помощью фиксируют положение и динамику перемещения каждого светового пятна по экрану и используют эти данные для вычисления в реальном времени положения конечного звена механизма промышленного робота.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию «новизна».
Признаки отличительной части формулы изобретения обеспечивают решение следующих функциональных задач.
Признаки «… за пределами рабочей зоны многозвенного механизма промышленного робота размещают, как минимум два взаимно перпендикулярных экрана большого размера …» обеспечивают возможность получения точек контакта с экранами лучей от источников света, закрепленных на конечном звене, тем самым повышение точности при увеличении рабочей зоны (удалении экрана от источника света) вследствие большого радиуса описываемого лучом источника света при угловом перемещении, характерном для многозвенных механизмов, что ведет к пропорционально увеличенной «отрисовке» траектории луча на экране. Перпендикулярность экранов упрощает вычислительные процедуры, при реализации способа.
Признаки, указывающие, что «на конечном звене многозвенного механизма устанавливают разнесенные источники когерентного излучения», обеспечивают минимизацию размеров точек проекции, а их «разнесенность» позволяет обеспечить высокую точность пространственного позиционирования конечного звена.
Признаки, указывающие, что разнесенные источники когерентного излучения устанавливают «так, чтобы в каждый момент времени световые пятна минимум двух источников были видны на взаимно перпендикулярных экранах», позволяют обеспечить вычисление координат пространственного позиционирования конечного звена.
Признаки, указывающие, что «видеокамеры располагают с возможностью обзора всей площади экрана», позволяют минимизировать число видеокамер, задействуемых при реализации способа.
Признаки, указывающие, что с помощью видеокамер «фиксируют положение и динамику перемещения каждого светового пятна по экрану», обеспечивают получение информации, необходимой для вычисления координат пространственного положения минимум двух точек конечного звена.
Признаки указывающие, что «используют эти данные для вычисления в реальном времени положения конечного звена механизма промышленного робота» обеспечивают определение координат пространственного положения конечного звена и конечное использование этой информации.
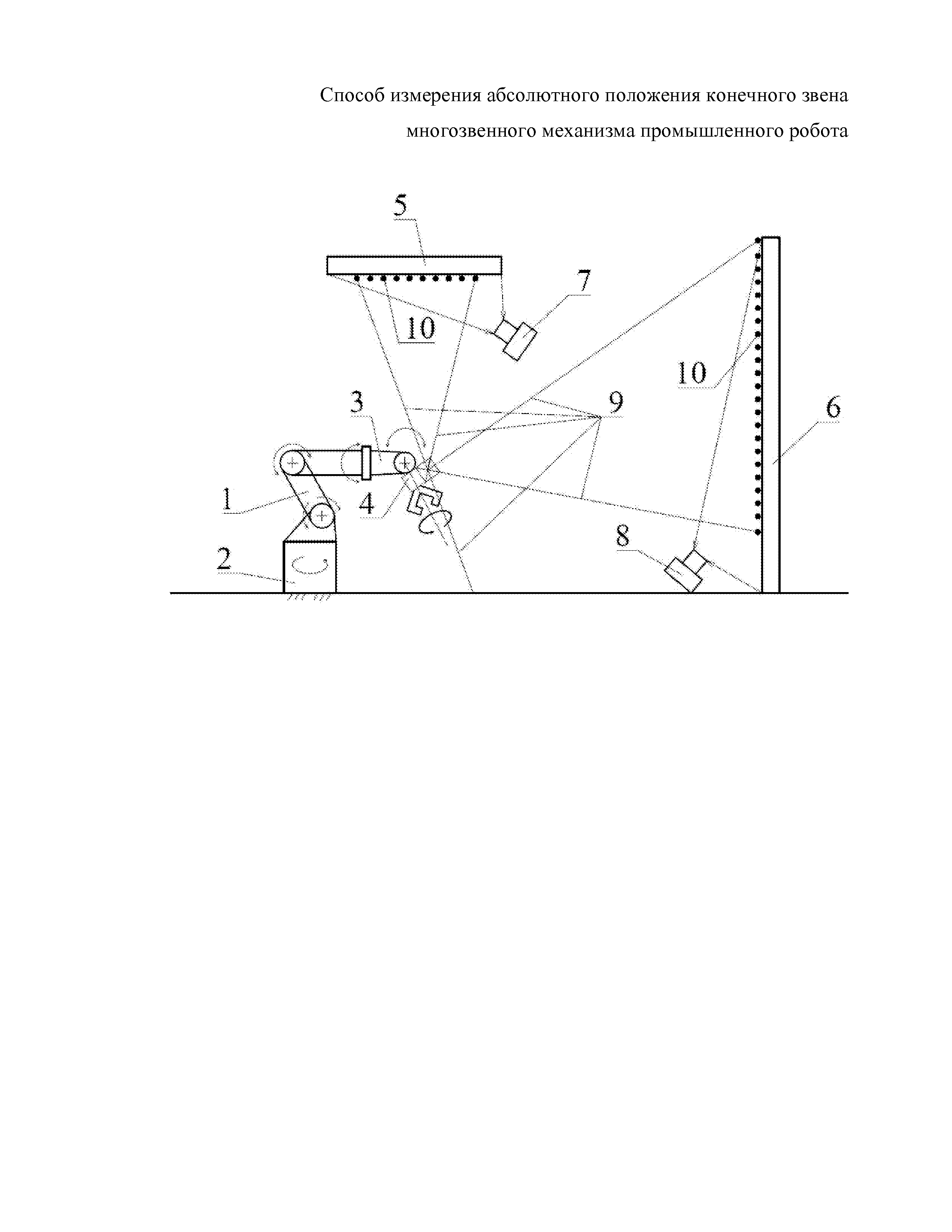
На чертеже изображена схема расстановки оборудования, необходимого для реализации заявленного способа.
На чертежах показаны промышленный робот 1, с системой управления 2, его конечное звено 3, источники когерентного излучения 4, экраны большого размера 5 и 6, видеокамеры 7 и 8, оси лучей 9 источников когерентного излучения 4, световое пятно 10.
Промышленный робот 1 с системой управления 2 конструктивно не отличаются от устройств сходного назначения. В качестве источников когерентного излучения 4 используются лазеры известной конструкции, например полупроводниковые. Если конечное звено 3 промышленного робота кроме угловых перемещений может вращаться вокруг своей продольной оси, на угол, приводящий к уходу световых пятен за пределы площади экранов 5 и 6, необходимо будет использовать дополнительные источники когерентного излучения 4, обеспечивающие сохранение световых пятен 10 на соответствующих экранах. Дополнительные источники когерентного излучения 4 размещают так, чтобы оси их лучей 9 и лучей «основных» излучателей находились в одной плоскости, перпендикулярной продольной оси конечного звена 3, при этом заранее определяют угловое отклонение положения оси лучей 9 источников когерентного излучения 4. В составе оборудования, обеспечивающего реализацию заявленного способа, используют как минимум два взаимно перпендикулярных экрана 5 и 6 большого размера, которые размещают за пределами рабочей зоны многозвенного механизма промышленного робота. В качестве таких экранов 5 и 6 могут использоваться взаимно перпендикулярные стены помещения, в котором смонтирован промышленный робот.
Для предотвращения затенения источников когерентного излучения 4 оборудованием и повышения точности определения положения конечного звена могут быть использованы дополнительные источники когерентного излучения 4, также могут быть использованы дополнительные экраны с дополнительными видеокамерами (на чертеже не показаны).
Видеокамеры 7 и 8 конструктивно не отличаются от известных, желательно, чтобы это были высокоскоростные камеры, при этом одна видеокамера «обслуживает» один экран (в поле ее захвата попадает вся площадь экрана).
Способ реализуется следующим образом.
Промышленный робот 1 устанавливают на технологическое основание. На его конечном звене 3 закрепляют с разнесением друг от друга источники когерентного излучения 4 в количестве, достаточном для обеспечения надежного управления роботом. Определяют координаты их центров, выполняют их взаимную привязку. За пределами рабочей зоны многозвенного механизма промышленного робота размещают как минимум два взаимно перпендикулярных экрана большого размера 5 и 6. Устанавливают видеокамеры 7 и 8, каждая из которых должна будет отслеживать световые пятна 10 (точки пересечения с соответствующим экраном лучей 9 источников когерентного излучения 4), на всей площади экрана.
Далее включают промышленный робот в работу под управлением его системы управления 2. В процессе перемещения конечного звена 3 и изменения его пространственного положения световые пятна 10, формируемые в точках контакта лучей 9 с экранами 5 и 6, будут соответственно перемещаться на плоскости экранов. Неподвижные видеокамеры фиксируют положение и динамику перемещения каждого светового пятна 10 по соответствующему экрану. Эти данные передаются в систему управления 2 промышленного робота, известным путем переводятся в цифровую форму с пересчетом положения конечного звена 3 с использованием уравнений обратной кинематики, данные о котором используются для управления движениями робота.
Повышение точности определения положением конечного звена 3 робота при увеличении рабочей зоны (удалении экрана от источников когерентного излучения 4) достигается вследствие большого радиуса описываемого лучом источника света при угловом перемещении, характерном для многозвенных механизмов, что ведет к пропорционально увеличенной «отрисовке» траектории луча на экране. Увеличение быстродействия достигается высокой контрастностью светового пятна на экране, позволяющей выделять точечный объект с минимальным объемом вычислений.
Пара экран-камера при необходимости может быть заменен светочувствительным экраном (матрицей), непосредственно выдающий координату попадания луча, что может ещё больше увеличить быстродействие системы.
Способ определения абсолютного положения конечного звена многозвенного механизма промышленного робота, включающий использование двух неподвижных видеокамер и вычисление положения звена механизма с использованием уравнений обратной кинематики, отличающийся тем, что за пределами рабочей зоны многозвенного механизма промышленного робота размещают как минимум два взаимно перпендикулярных экрана, а на его конечном звене устанавливают разнесенные источники когерентного излучения с обеспечением видимости в каждый момент времени световых пятен минимум двух источников на взаимно перпендикулярных экранах, при этом видеокамеры располагают с возможностью обзора всей площади экрана, с их помощью фиксируют положение и динамику перемещения каждого светового пятна по экрану и используют эти данные для вычисления в реальном времени положения конечного звена механизма промышленного робота.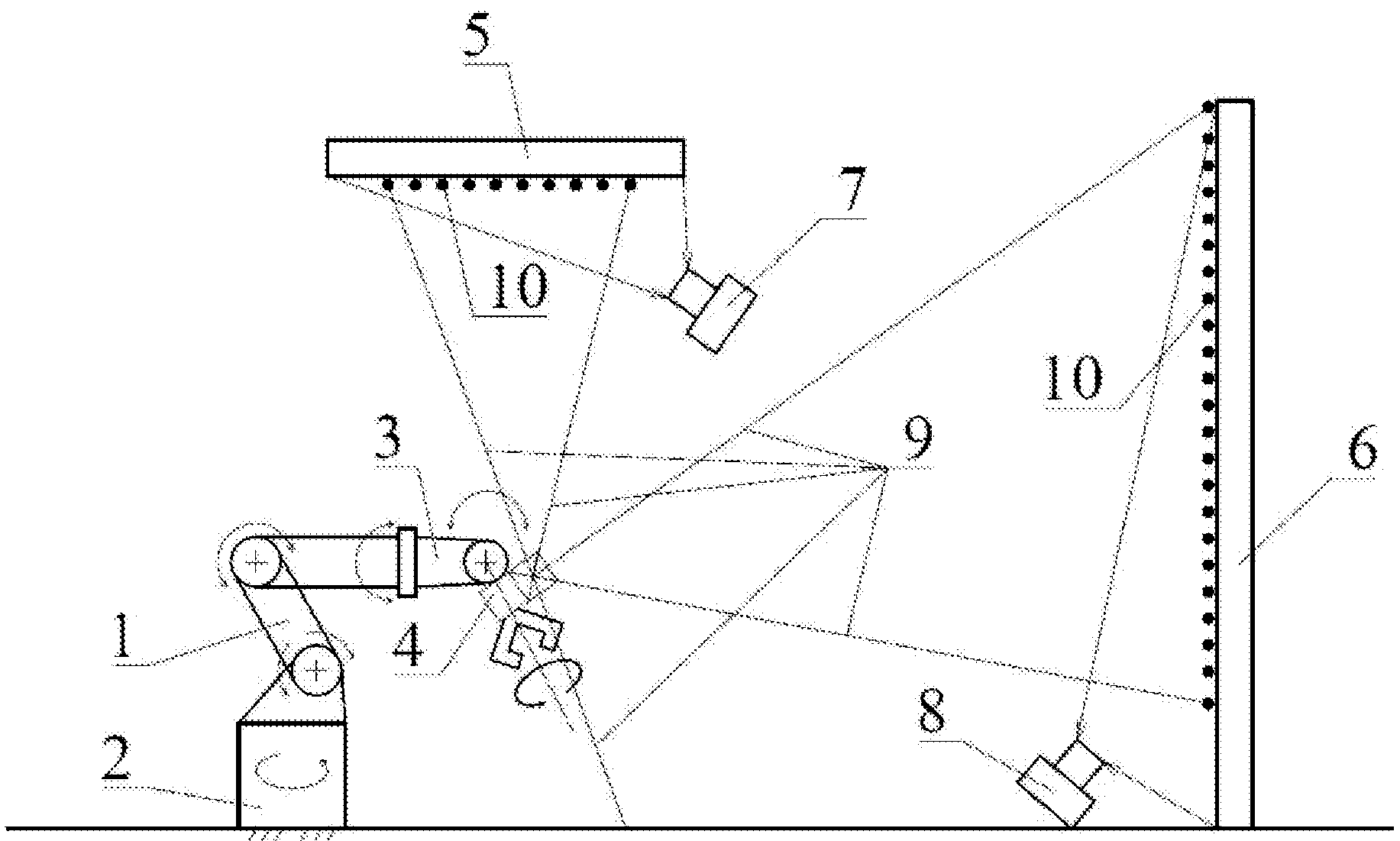
Смесь почвенная для рекультивации нарушенных земель
Способ когерентной разнесенной передачи сигнала
Состав для производства хлебобулочных изделий
Радиальный подшипниковый узел
Специальный бетон
Способ изготовления клеточного блока клеточного материала
Способ обработки молочной сыворотки
Композиция для получения напитка на основе молочной сыворотки
Композиция для получения напитка на основе молочной сыворотки
Способ получения со-экстракта родиолы розовой
Состав для производства леденцовой карамели
Вяжущее
Способ оценки формы измеренной поверхности
Способ оценки формы измеренной поверхности
Узел автоматического крепления съемного элемента

