Результат интеллектуальной деятельности: С-ОБРАЗНАЯ СТЕРЖНЕВАЯ КОНСТРУКЦИЯ, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ ОБЕСПЕЧЕНИЯ КОМПЕНСАЦИИ ОТКЛОНЕНИЯ, И СВЯЗАННЫЙ СПОСОБ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
Многие конструкции требуют клепки, и при этом некоторые конструкции требуют установки сотен или тысяч заклепок. В качестве примера, крыло воздушного летательного аппарата может требовать установки множества заклепок. Для того чтобы облегчить установку заклепок, были разработаны клепальные машины, имеющие первый и второй клепальные узлы, которые расположены с выравниванием друг относительно друга возле противоположных поверхностей этой конструкции, таких как противоположные поверхности крыла. Такие клепальные машины обеспечивают возможность расположения заклепки надлежащим образом и последующие ее установку и осаживание.
Установка и осаживание заклепки могут создавать значительную силу, действующую на клепальную машину, и могут принуждать первый и второй клепальные узлы, которые расположены с выравниванием друг относительно друга возле противоположных поверхностей конструкции, отклоняться от этой конструкции. Такое отклонение клепальных узлов может быть опасным потому, что их относительное местоположение по отношению к конструкции может изменяться в течение процесса установки заклепок, в результате чего заклепка может быть размещена неточно или со смещением. Кроме того, отклонение клепальной машины может быть причиной ее более раннего или более частого текущего ремонта, чем это желательно, и иногда может сократить срок ее службы.
В связи с этим были разработаны клепальные машины, которые имеют значительные размеры и вес для того, чтобы противостоять отклоняющим силам, создаваемым в течение клепального процесса. Хотя эти более массивные клепальные машины в целом поддерживают свое относительное положение относительно конструкции, в которую устанавливают заклепку, размер и вес таких клепальных машин может ограничивать их мобильность или транспортабельность. Таким образом, эти более массивные клепальные машины часто являются стационарными, так что конструкция, подлежащая заклепыванию, такая как крыло, должна быть перемещена для выравнивания с этой клепальной машиной, а впоследствии неоднократно перемещена относительно клепальной машины, когда устанавливают или осаживают каждую заклепку. Этот процесс установки в положение и последующего изменения положения конструкции, такой как крыло, относительно клепальной машины может ограничивать приспосабливаемость производственного процесса вследствие необходимости удерживать клепальную машину неподвижной и соответствующей необходимости переноса конструкции, подлежащей заклепыванию, посредством системы транспортировки материалов, которая является довольно сложной для управляемой установки этой конструкции, такой как относительно большая конструкция, такая как крыло, в несколько относительно точных положений относительно клепальной машины.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с примерным вариантом осуществления настоящего изобретения предоставлены С-образная стержневая конструкция, роботизированная система и связанный способ для того, чтобы реагировать на нагрузки, приложенные к С-образной стержневой конструкции во время активации рабочего инструмента, такие как отклоняющие нагрузки, создаваемые в течение клепальной работы, и компенсировать их. С-образная стержневая конструкция согласно примерному варианту осуществления настоящего изобретения может не только реагировать на нагрузки, созданные во время работы, и компенсировать их, но также делать это таким способом, что снижает или исключает отклонение С-образной стержневой конструкции. Таким образом, С-образная стержневая конструкция будет более легкой и, следовательно, увеличит мобильность. Например, С-образную стержневую конструкцию могут переносить при помощи робота во время выполнения его операций, тем самым увеличивая эффективность производственного процесса, обеспечивая возможность управляемой установки С-образной стержневой конструкции и связанного рабочего инструмента в положение относительно конструкции, такой как крыло, тем самым потенциально уменьшая потребность в транспортировке и установке в положение этой конструкции в течение производственного процесса.
В одном варианте осуществления предоставлена С-образная стержневая конструкция для переноса инструмента, которая содержит множество звеньев и множество штифтов, соединяющих между собой указанные звенья для формирования конфигурации в виде фермы, соединенной штифтами. По меньшей мере одно из указанных звеньев выполнено с возможностью переноса инструмента. В этом варианте осуществления конфигурация в виде фермы, соединенной штифтами, из указанных звеньев чувствительна к нагрузке, передаваемой на С-образную стержневую конструкцию в ответ на активацию инструмента, таким образом, что каждое звено находится в сжатии или растяжении. Звенья, которые выполнены с возможностью нахождения в растяжении, могут быть сформированы из анизотропного материала, такого как композиционный материал. Звенья, которые выполнены с возможностью нахождения в сжатии, могут быть сформированы из металла. С-образная стержневая конструкция согласно этому варианту осуществления также содержит множество гидравлических цилиндров, включая первый и второй гидравлические цилиндры, соединенные с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену. Первый гидравлический цилиндр этого варианта осуществления выполнен с возможностью работы в режиме сжатия в ответ на деформацию в С-образной стержневой конструкции, связанную с активацией инструмента. Второй гидравлический цилиндр этого варианта осуществления выполнен с возможностью нахождения в режиме растяжения в ответ на работу первого гидравлического цилиндра в режиме сжатия.
Первый и второй гидравлические цилиндры одного варианта осуществления сообщаются по текучей среде таким образом, что гидравлическая жидкость, вытесняемая из первого гидравлического цилиндра в режиме сжатия, доставляется во второй гидравлический цилиндр. Каждый из первого и второго гидравлических цилиндров этого варианта осуществления содержит поршень. В силу этого первый гидравлический цилиндр может быть выполнен с возможностью побуждения своего соответствующего поршня вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия. В другом варианте осуществления С-образная стержневая конструкция содержит внешнюю гидравлическую управляющую систему, выполненную с возможностью направления гидравлической жидкости во второй гидравлический цилиндр в ответ на работу первого гидравлического цилиндра в режиме сжатия.
В другом варианте осуществления представлена роботизированная система, которая содержит робот, выполненный с возможностью обеспечения управляемого перемещения, и С-образную стержневую конструкцию, переносимую этим роботом. С-образная стержневая конструкция для переноса инструмента может содержать конфигурацию в виде фермы, соединенной штифтами, которая содержит множество звеньев, соединенных посредством штифтов. С-образная стержневая конструкция этого варианта осуществления также содержит множество гидравлических цилиндров, включая первый и второй гидравлические цилиндры, соединенных с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену. Роботизированная система согласно этому варианту осуществления может также содержать инструмент, такой как клепальная машина, переносимый по меньшей мере одним из указанных звеньев. Конфигурация в виде фермы, соединенной штифтами, одного варианта осуществления чувствительна к нагрузке, передаваемой на С-образную стержневую конструкцию в ответ на активацию инструмента посредством робота, таким образом, что каждое звено находится в сжатии или растяжении. Звенья, выполненные с возможностью нахождения в растяжении, могут быть сформированы из анизотропного материала, такого как композиционный материал. Звенья, которые выполнены с возможностью нахождения в сжатии, могут быть сформированы из металла. Первый гидравлический цилиндр этого варианта осуществления выполнен с возможностью работы в режиме сжатия в ответ на деформацию в С-образной стержневой конструкции, связанную с активацией инструмента. Второй гидравлический цилиндр этого варианта осуществления выполнен с возможностью нахождения в режиме растяжения в ответ на работу первого гидравлического цилиндра в режиме сжатия.
Первый и второй гидравлические цилиндры одного варианта осуществления могут сообщаются по текучей среде таким образом, что гидравлическая жидкость, вытесняемая из первого гидравлического цилиндра в режиме сжатия, доставляется во второй гидравлический цилиндр. В этом варианте осуществления каждый из первого и второго гидравлических цилиндров может содержать поршень. В силу этого первый гидравлический цилиндр может быть выполнен с возможностью побуждения соответствующего поршня вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия. Роботизированная система согласно другому варианту осуществления может также содержать внешнюю гидравлическую управляющую систему, выполненную с возможностью направления гидравлической жидкости во второй гидравлический цилиндр в ответ на работу первого гидравлического цилиндра в режиме сжатия.
В дополнительном варианте осуществления предоставлен способ компенсирования отклонения при активации инструмента, включающий обеспечение С-образной стержневой конструкции. С-образная стержневая конструкция содержит конфигурацию в виде фермы, соединенной штифтами, которая содержит множество звеньев, соединенных посредством штифтов, и множество гидравлических цилиндров, соединенных с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену. Способ согласно этому варианту осуществления также содержит активацию инструмента, такого как клепальная машина, переносимого С-образной стержневой конструкцией. Конфигурация в виде фермы, соединенной штифтами, из указанных звеньев чувствительна к нагрузке, передаваемой на С-образную стержневую конструкцию в ответ на активацию инструмента, таким образом, что каждое звено находится в сжатии или растяжении. Способ этого варианта осуществления также включает побуждение первого гидравлического цилиндра работать в режиме сжатия в ответ на деформацию в С-образной стержневой конструкции, связанную с активацией инструмента. Способ согласно этому варианту осуществления также включает побуждение второго гидравлического цилиндра работать в режиме растяжения в ответ на работу первого гидравлического цилиндра в режиме сжатия.
Что касается работы первого гидравлического цилиндра в режиме сжатия, способ согласно одному варианту осуществления может вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия. В этом варианте осуществления работа второго гидравлического цилиндра в режиме растяжения может включать обеспечение вытеснения гидравлической жидкости из первого гидравлического цилиндра во второй гидравлический цилиндр. Каждый из первого и второго гидравлических цилиндров одного варианта осуществления может содержать поршень. В этом варианте осуществления способ может вытеснять гидравлическую жидкость из первого гидравлического цилиндра посредством побуждения соответствующего поршня вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия. Что касается побуждения первого гидравлического цилиндра работать в режиме сжатия, способ согласно другому варианту осуществления может вызывать вытеснение гидравлической жидкости из первого гидравлического цилиндра во внешнюю гидравлическую управляющую систему. Что касается побуждения второго гидравлического цилиндра работать в режиме растяжения, способ согласно этому варианту осуществления может побуждать внешнюю гидравлическую управляющую систему направлять гидравлическую жидкость во второй гидравлический цилиндр в ответ на работу первого гидравлического цилиндра в режиме сжатия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
После того как в общих чертах были описаны некоторые варианты осуществления настоящего изобретения, теперь будет сделана ссылка на сопутствующие чертежи, которые не обязательно выполнены в масштабе и на которых:
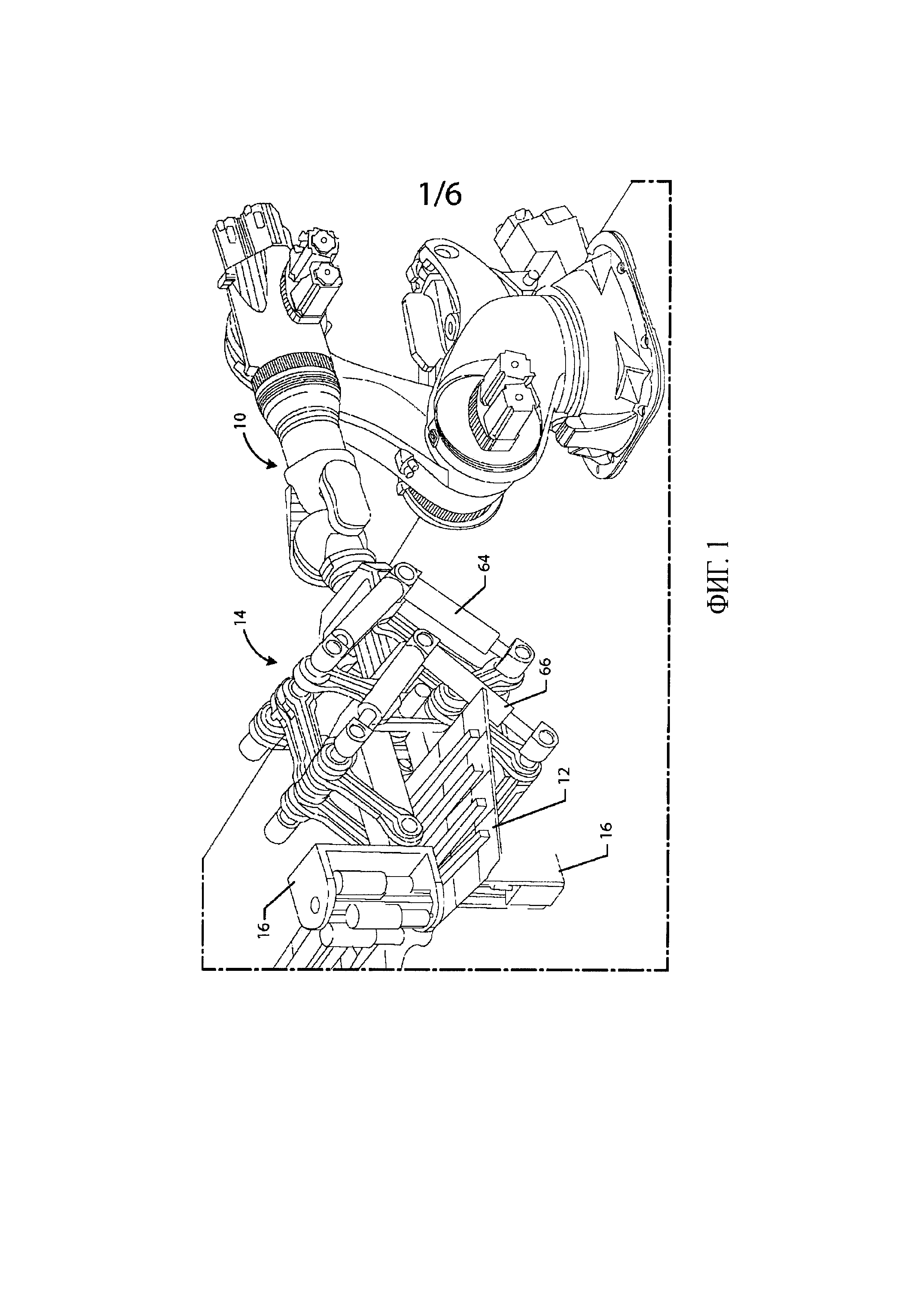
на фиг. 1 изображен перспективный вид роботизированной системы в соответствии с одним вариантом осуществления настоящего изобретения;
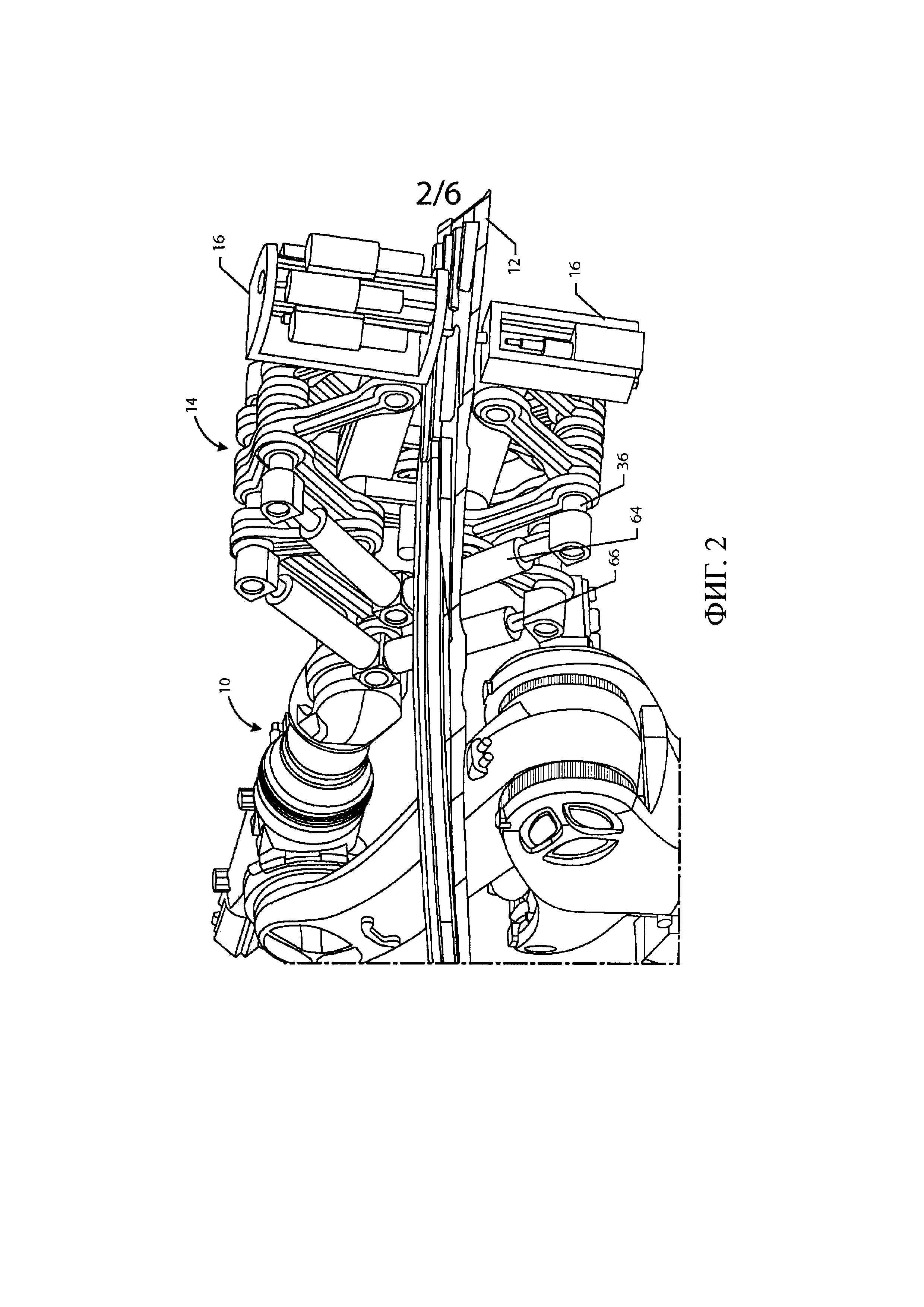
на фиг. 2 изображен перспективный вид роботизированной системы с фиг. 1, взятый с другой точки обзора, в соответствии с одним вариантом осуществления настоящего изобретения;
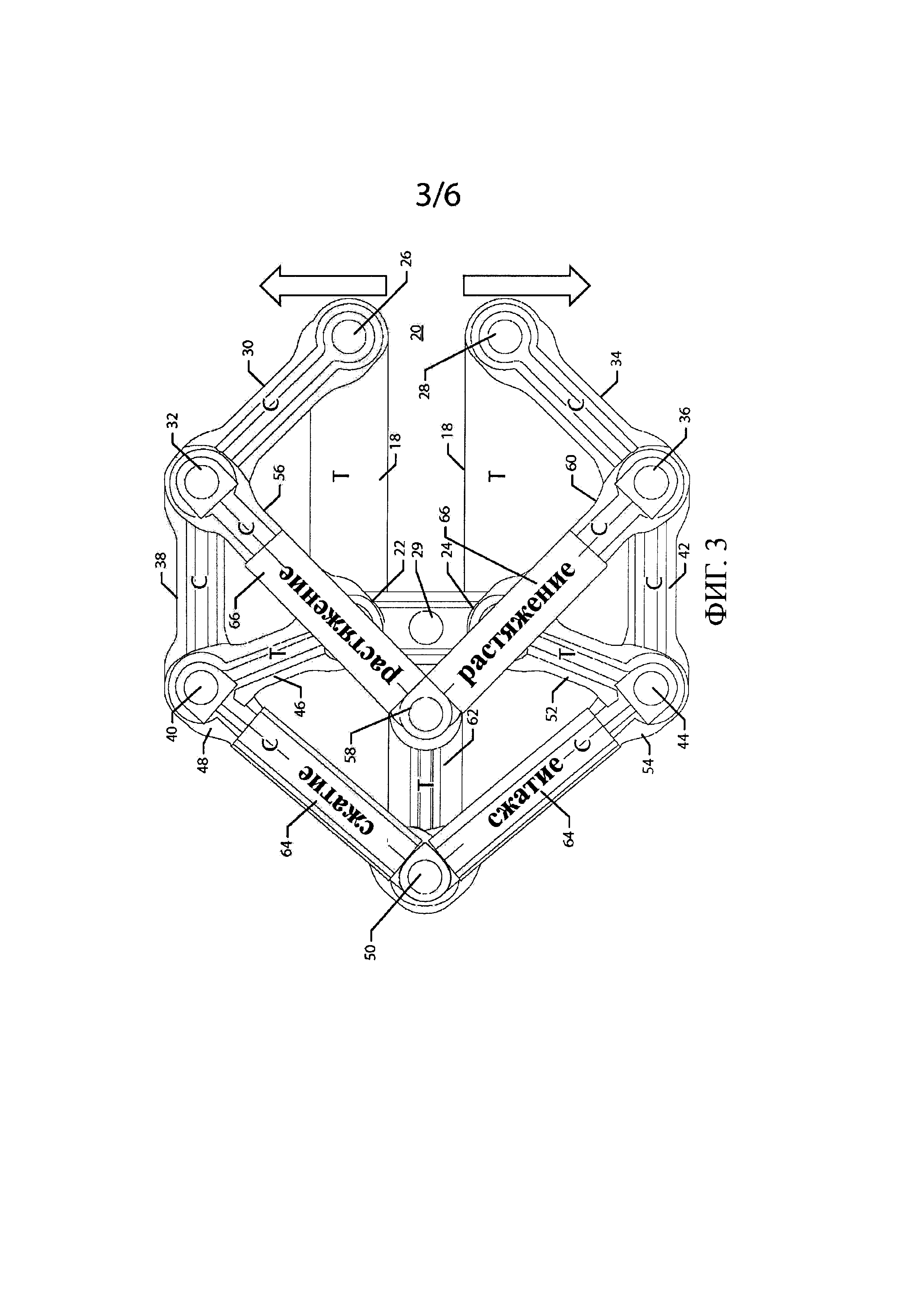
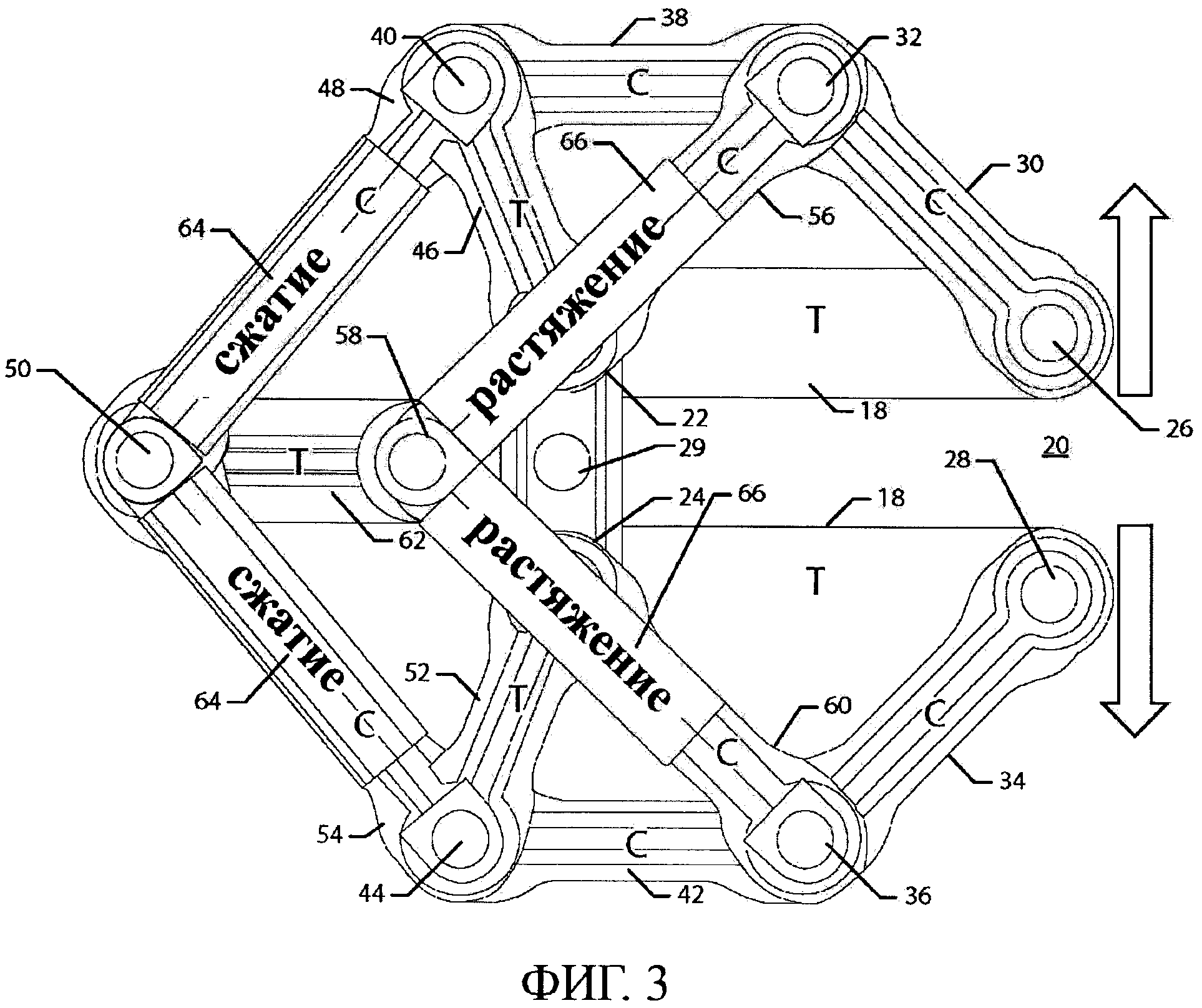
на фиг. 3 представлен вид сбоку С-образной стержневой конструкции в соответствии с одним вариантом осуществления настоящего изобретения;
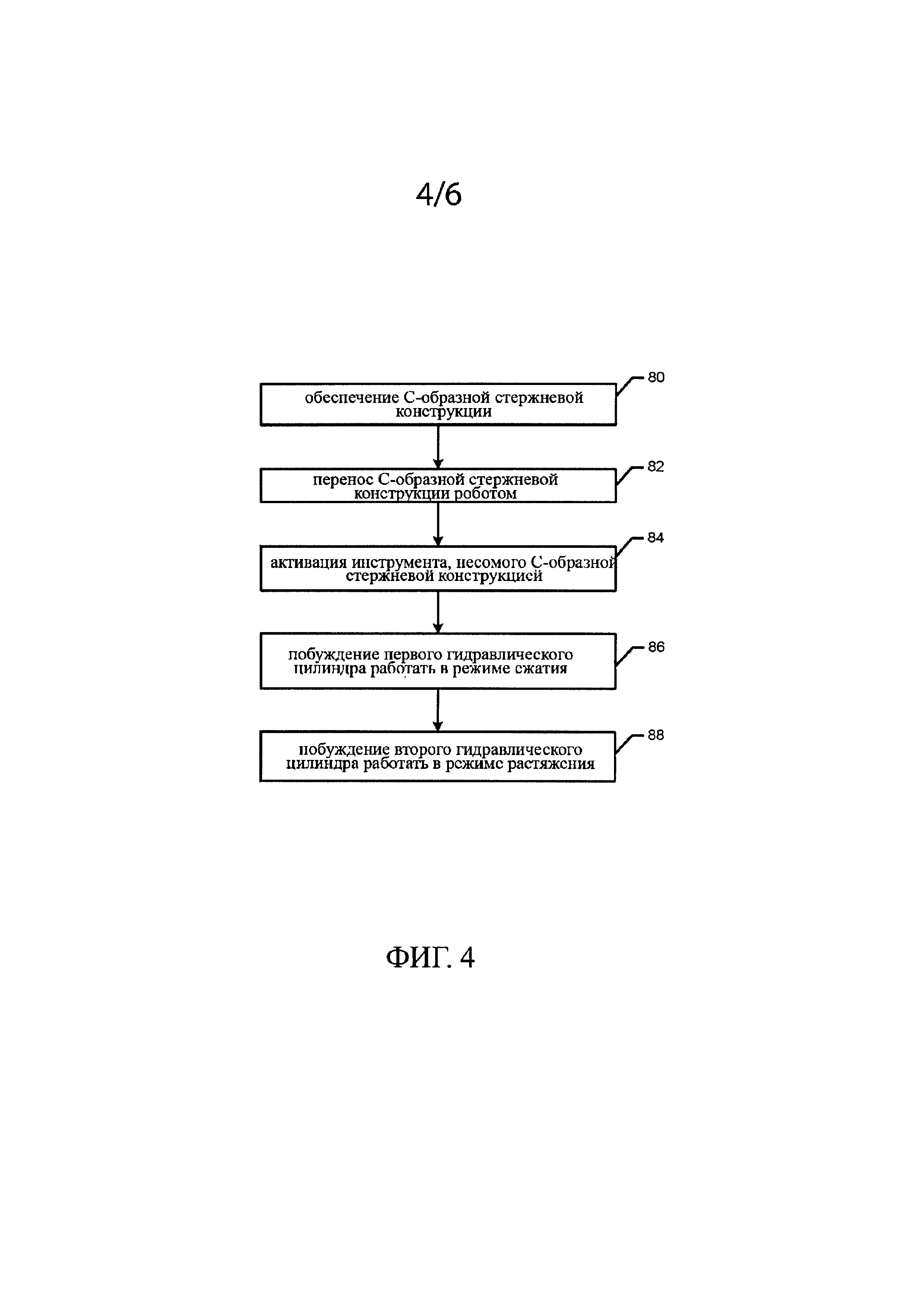
на фиг. 4 изображена блок-схема, иллюстрирующая операции, выполняемые в соответствии с одним вариантом осуществления настоящего изобретения;
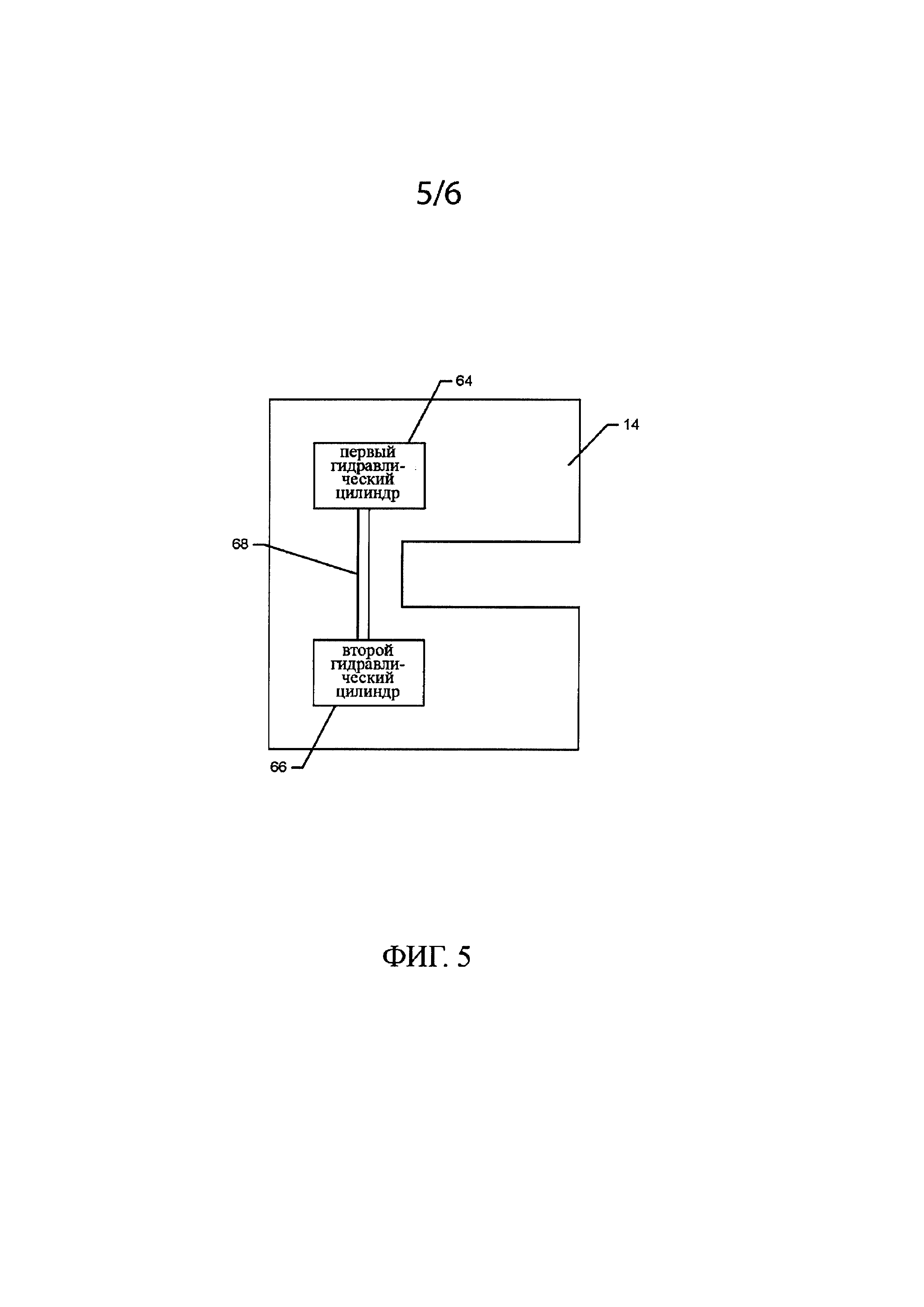
на фиг. 5 представлена структурная схема С-образной стержневой конструкции, имеющей пассивную гидравлическую систему в соответствии с одним вариантом осуществления настоящего изобретения; и
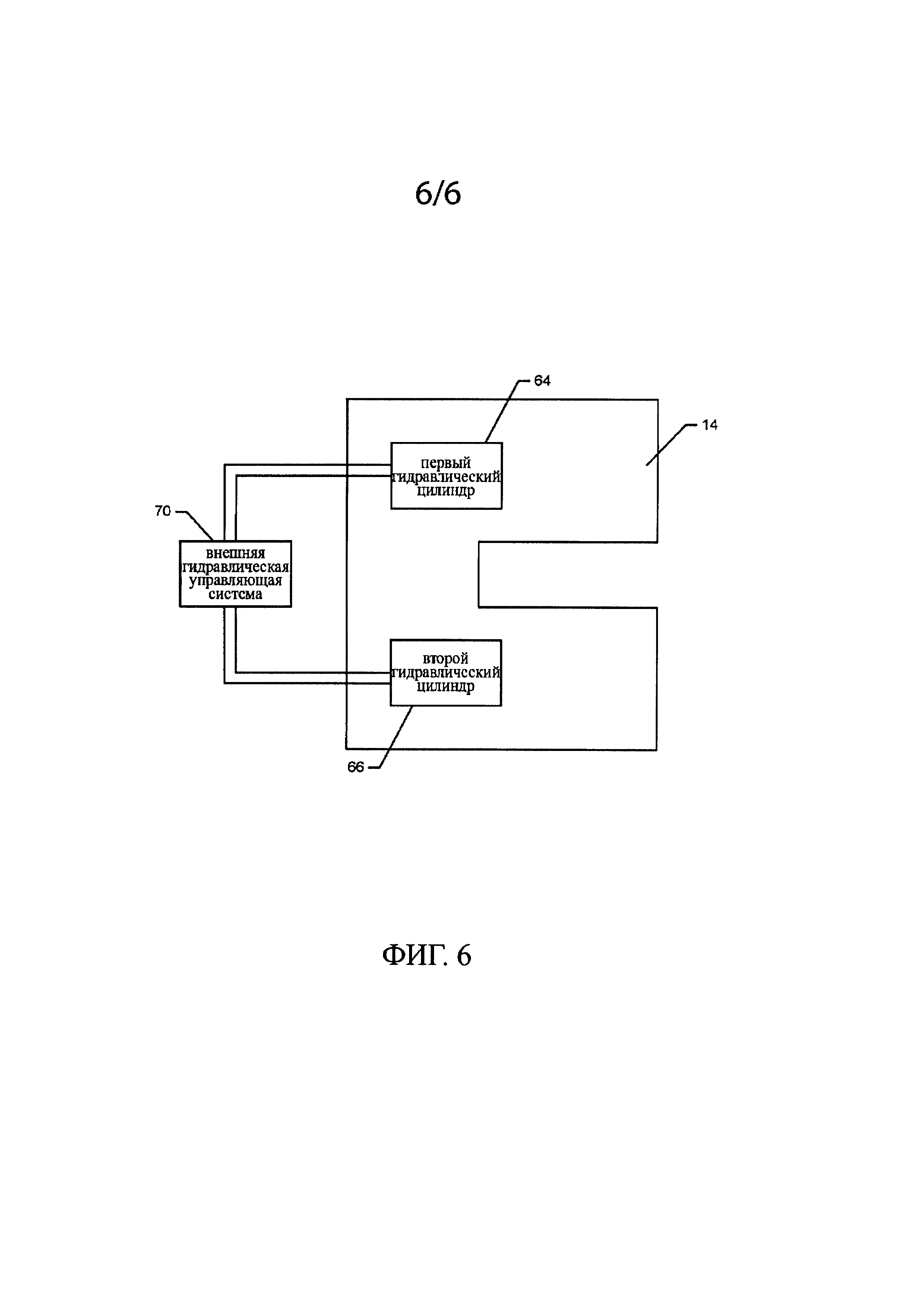
на фиг. 6 представлена структурная схема С-образной стержневой конструкции, имеющей активную гидравлическую систему в соответствии с другим вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Теперь ниже будут более полно описаны варианты осуществления настоящего изобретения со ссылкой на сопутствующие чертежи, на которых показаны некоторые, но не все варианты осуществления. Разумеется, эти варианты осуществления могут быть воплощены во многих различных формах и не должны быть истолкованы как ограничивающие до вариантов осуществления, изложенных в настоящем документе; скорее, эти варианты осуществления предоставлены таким образом, что это раскрытие будет удовлетворять требованиям действующего законодательства. Подобные номера относятся к подобным элементам на всем протяжении чертежей.
Теперь обратимся к фиг. 1, на которой изображена роботизированная система в соответствии с одним вариантом осуществления настоящего изобретения. Роботизированная система содержит робота 10, выполненного с возможностью обеспечения управляемого перемещения рабочего органа. В этом отношении робот 10 может быть выполнен с возможностью обеспечения перемещения во множестве направлений, включая как линейное, так и угловое направления. Например, в одном варианте осуществления робот 10 может быть сконфигурирован для перемещения по шести осям.
Как описано ниже, роботизированная система может быть сконфигурирована для выполнения по меньшей мере одной операции, такой как производственная операция, например заклепывание обрабатываемой детали. Обрабатываемая деталь в виде консоли 12 крыла показана на фиг. 1 и 2 и будет описана ниже в отношении роботизированной системы, служащей для установки множества заклепок в эту консоль крыла, такой как крепление множества стингеров к обшивке крыла. Однако роботизированная система согласно другим вариантам осуществления может быть выполнена с возможностью выполнения различных производственных операций на различных типах обрабатываемых деталей, включая обрабатываемые детали вне авиационной промышленности.
Как показано на фиг. 1-3, рабочий орган иллюстрированного варианта осуществления содержит С-образную стержневую конструкцию 14, которую несет робот 10, а также которую можно управляемо устанавливать посредством робота в положение относительно обрабатываемой детали. Таким образом, как показано в блоках 80 и 82 на фиг. 4, может быть обеспечена С-образная стержневая конструкция, переносимая роботом 10. С-образная стержневая конструкция 14 может содержать пару зажимов, посредством которых задан просвет. Следовательно, робот 10 может управляемо устанавливать С-образную стержневую конструкцию 14 согласно этому варианту осуществления в положение относительно обрабатываемой детали, например консоли 12 крыла, таким образом, что обрабатываемая деталь проходит через просвет, заданный С-образной стержневой конструкцией. Противоположные зажимы С-образной стержневой конструкции 14 этого варианта осуществления расположены с выравниванием друг с другом на противоположных сторонах обрабатываемой детали.
Как также показано на фиг. 1 и 2, роботизированная система согласно одному варианту осуществления может содержать инструмент 16, переносимый С-образной стержневой конструкцией 14. Хотя роботизированная система может содержать различные инструменты 16, инструмент иллюстрированного варианта осуществления содержит клепальную машину, имеющую первый и второй клепальные узлы, расположенные с выравниванием на противоположных сторонах обрабатываемой детали, тем самым облегчая установку заклепок по обрабатываемой детали в ответ на активацию посредством робота 10. Как показано в блоке 84 на фиг. 4, инструмент 16, переносимый С-образной стержневой конструкцией 14, может быть активирован, например, посредством робота 10.
С-образная стержневая конструкция 14 содержит множество звеньев, соединенных посредством штифтов таким образом, что формируют конфигурацию в виде фермы, соединенной штифтами. Конфигурация в виде фермы, соединенной штифтами, может устранять многие, если не все, изгибающие нагрузки от С-образной стержневой конструкции, которые в ином случае могут создаваться в ответ на активацию инструмента 16. Напротив, конфигурация в виде фермы, соединенной штифтами, может вызывать поддержку всех траекторий действия нагрузок всеми элементами, находящимися либо в растяжении, либо в сжатии. Как описано ниже, конфигурация в виде фермы, соединенной штифтами, отличается от сценария нагрузок консольной балки с закрепленным концом благодаря устранению изгибающих нагрузок от конструкции. Дополнительно, конфигурация в виде фермы, соединенной штифтами, может преимущественно распределять плотность деформации по всей конструкции.
Хотя конфигурация в виде фермы, соединенной штифтами, может иметь различные конфигурации, конфигурация в виде фермы, соединенной штифтами, иллюстрированного на фиг. 3 варианта осуществления содержит пару зажимных элементов 18, которые проходят параллельно друг другу таким образом, что задают просвет 20, через который проходит обрабатываемая деталь. Зажимные элементы 18 могут проходить наружу от своих ближних концов, соединенных со штифтами 22, 24, до своих дальних концов, соединенных со штифтами 26, 28. Ближние концы зажимных элементов 18 также могут быть соединены по меньшей мере с одним звеном 29, которое проходит между штифтами 22 и 24. Указанное множество звеньев иллюстрированного варианта осуществления также содержит по меньшей мере два звена 30, которые соединены со штифтом 26 и проходят под углом от дальнего конца соответствующего зажимного элемента 28 к первой стороне С-образной стержневой конструкции 14. На первой стороне С-образной стержневой конструкции 14 звенья 30 могут быть соединены со штифтом 32. Указанное множество звеньев также может содержать по меньшей мере два звена 34, которые соединены со штифтом 28 и проходят под углом от дальнего конца соответствующего зажимного элемента 18 ко второй стороне С-образной стержневой конструкции 14, противоположной первой стороне. На второй стороне С-образной стержневой конструкции 14 звенья 34 могут быть соединены со штифтом 36.
Указанное множество звеньев иллюстрированного варианта осуществления также содержит по меньшей мере два звена 38, которые проходят по части первой стороны С-образной стержневой конструкции 14 от штифта 32 к штифту 40, и по меньшей мере два звена 42, которые проходят по второй стороне С-образной стержневой конструкции от штифта 36 до штифта 44. От штифта 40 указанное множество звеньев иллюстрированного варианта осуществления также содержат по меньшей мере два звена 46, которые проходят под углом к штифту 22 на ближнем конце соответствующего зажимного элемента 18, и по меньшей мере два звена 48, которые проходят под углом к штифту 50, расположенному на противоположной к просвету, заданному зажимными элементами, стороне. Аналогично от штифта 44 указанное множество звеньев иллюстрированного варианта осуществления также содержит по меньшей мере два звена 52, которые проходят под углом к штифту 24 на ближнем конце соответствующего зажимного элемента 18, и по меньшей мере два звена 54, которые проходят под углом к штифту 50. Указанное множество звеньев иллюстрированного варианта осуществления также может содержать по меньшей мере два звена 56, которые проходят под углом от штифта 32 к штифту 58, расположенному с выравниванием с просветом, заданным зажимными элементами 18, но сзади него. Аналогично указанное множество звеньев иллюстрированного варианта осуществления также может содержать по меньшей мере два звена 60, которые проходят под углом от штифта 36 к штифту 58. Наконец, указанное множество звеньев может содержать по меньшей мере два звена 62, которые проходят между штифтами 50 и 58 таким образом, что в общем находятся на одной оси с просветом, заданным зажимными элементами 18.
Зажимные элементы 18 могут быть выполнены с возможностью переноса инструмента 16 таким образом, что этот инструмент может быть управляемым образом установлен в положение относительно обрабатываемой детали, которая может проходить через просвет 20, заданный зажимными элементами. В ответ на активацию инструмента 16 роботом 10 на дальние концы зажимных элементов 18 могут быть приложены отклоняющие силы, которые стремятся оттолкнуть дальние концы зажимных элементов друг от друга, как показано направленными вверх и вниз стрелками на фиг. 3. В результате деформации, передаваемой на С-образную стержневую конструкцию 14 в результате отклонения, созданного активацией инструмента 16, множество звеньев, таких как звенья 30, 34, 38, 42, 48, 54, 56 и 60, находятся в сжатии, как представлено посредством символа С в варианте осуществления на фиг. 3, а множество звеньев, таких как зажимные элементы 18 и звенья 46, 52 и 62, находятся в растяжении, как представлено посредством символа Т в варианте осуществления на фиг. 3. Для того чтобы надлежащим образом реагировать на сжимающие или растягивающие силы, приложенные на соответствующие звенья из указанных звеньев, звенья, которые находятся в сжатии в ответ на активацию инструмента 16, могут быть сформированы из различного материала, чем звенья, находящиеся в сжатии в ответ на активацию этого инструмента. В этом отношении звенья, которые находятся в сжатии, могут быть сформированы из металла, такого как алюминий, тогда как звенья, находящиеся в растяжении, могут быть сформированы из анизотропного материала, такого как композиционный материал, например материал из углеродного волокна, имеющий более высокую удельную жесткость, чем сталь или алюминий. В одном варианте осуществления по меньшей мере одно звено может быть предварительно изогнуто таким образом, что соответствующее звено (звенья) может (могут) удлиняться в ответ на предполагаемые рабочие нагрузки, тем самым также компенсируя отклонение.
Для того чтобы компенсировать отклонение, передаваемое на С-образную стержневую конструкцию 14 в ответ на активацию инструмента 16, С-образная стержневая конструкция также может содержать множество гидравлических цилиндров. Гидравлические цилиндры могут быть соединены с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену. В этом отношении указанное множество гидравлических цилиндров может быть соединено таким образом, что они проходят между парой штифтов конфигурации в виде фермы, соединенной штифтами. С-образная стержневая конструкция 14 согласно варианту осуществления, иллюстрированному на фиг. 3, содержит по меньшей мере один гидравлический цилиндр 64, выполненный с возможностью работы в режиме сжатия в ответ на деформацию внутри С-образной стержневой конструкции, связанную с активацией инструмента 16. См. блок 86 на фиг. 4. В иллюстрированном варианте осуществления С-образная стержневая конструкция 14 содержит две пары первых гидравлических цилиндров 64, при этом одна пара расположена на каждой стороне С-образной стержневой конструкции. Каждый из первых гидравлических цилиндров 64 может быть соединен со штифтом 50 и может проходить отсюда под углом в противоположных направлениях к штифтам 40 и 44, расположенным на первой и второй сторонах С-образной стержневой конструкции 14 соответственно. Дополнительно, указанное множество гидравлических цилиндров может содержать по меньшей мере один второй гидравлический цилиндр 66, выполненный с возможностью нахождения в режиме растяжения в ответ на работу первого гидравлического цилиндра (цилиндров) 64 в режиме сжатия. См. блок 88 на фиг. 4. В иллюстрированном варианте осуществления С-образная стержневая конструкция 14 также может содержать две пары вторых гидравлических цилиндров 66, которые проходят под углом от штифта 58 в противоположных направлениях к штифтам 24 и 36, расположенным на первой и второй сторонах С-образной стержневой конструкции соответственно.
Каждый гидравлический цилиндр может содержать гидравлическую жидкость, расположенную внутри корпуса цилиндра. Каждый гидравлический цилиндр также может содержать поршень, расположенный внутри корпуса цилиндра и прикрепленный с помощью вала к соответствующему штифту. Поршень выполнен с возможностью перемещения в продольном направлении внутри корпуса цилиндра под воздействием звена, параллельно с которым проходит указанный гидравлический цилиндр, находящийся в растяжении или сжатии.
Для того чтобы компенсировать отклонение, иным образом созданное в С-образной стержневой конструкции 14 в ответ на активацию инструмента 16, указанная пара первых гидравлических цилиндров 64 может работать в режиме сжатия таким образом, что поршни первых гидравлических цилиндров вытесняют из них жидкость, тогда как указанная пара вторых гидравлических цилиндров 66 работает в режиме растяжения, принимая дополнительную гидравлическую жидкость, что в свою очередь побуждает вал дополнительно удлиняться относительно соответствующего корпуса цилиндра. См. блок 86 и 88 на фиг. 4. В одном варианте осуществления гидравлическая система может быть пассивной гидравлической системой, как схематично показано на фиг. 5. В этом отношении трубопровод 68 для гидравлической жидкости (не показан) может соединять пару первых гидравлических цилиндров 64 с парой вторых гидравлических цилиндров. Поэтому перемещение поршней в корпусах цилиндров первых гидравлических цилиндров 64 может вытеснять гидравлическую жидкость наружу из первых гидравлических цилиндров. Гидравлическая жидкость может проходить через трубопровод 68 для гидравлической жидкости и входить в корпуса цилиндров вторых гидравлических цилиндров 66 таким образом, чтобы протолкнуть поршни вторых гидравлических цилиндров через корпуса цилиндров таким образом, чтобы удлинить валы, проходящие снаружи от них. После того как силы, которые иным образом вызывают отклонение в С-образной стержневой конструкции 14, были устранены, гидравлическая жидкость может протекать в противоположном направлении от вторых гидравлических цилиндров 66 к первым гидравлическим цилиндрам 64 таким образом, что возвращает гидравлические цилиндры в их нейтральные положения, например, ни удлиненные, ни сжатые положения.
В другом варианте осуществления, показанном схематично на фиг. 6, С-образная стержневая конструкция 14 может содержать внешнюю гидравлическую управляющую систему 70. Внешняя гидравлическая управляющая система 70 может содержать насос и аккумулятор или резервуар в жидкостной связи, такой как связь через соответствующие трубопроводы для гидравлической жидкости, с первыми гидравлическими цилиндрами 64 и вторыми гидравлическими цилиндрами 66. В силу этого в ответ на активацию инструмента 16 и результирующее отклонение, иным образом созданное в С-образной стержневой конструкции 14, первые гидравлические цилиндры 64 могут вытеснять из них гидравлическую жидкость наружу во внешнюю гидравлическую управляющую систему 70. В ответ внешняя гидравлическая управляющая система 70 может обнаруживать гидравлическую жидкость, обеспеченную первыми гидравлическими цилиндрами 64, и может, в свою очередь, вытеснять гидравлическую жидкость, такую как равное количество гидравлической жидкости, во вторые гидравлические цилиндры 66 таким образом, чтобы побуждать вторые гидравлические цилиндры удлиняться. После того как силы, которые иным образом вызывают отклонение в С-образной стержневой конструкции 14, были устранены, внешняя гидравлическая управляющая система может побуждать гидравлическую жидкость протекать в противоположном направлении таким образом, чтобы возвращать гидравлические цилиндры в их нейтральные положения, например, ни удлиненные, ни сжатые положения.
При совместной работе первых и вторых гидравлических цилиндров, как описано выше, отклонение, иным образом создаваемое на дальнем конце зажимных элементов 18, может быть уменьшено. Поэтому С-образная стержневая конструкция 14 может быть сформирована из звеньев, которые обеспечивают необходимую прочность для выдерживания сил, создаваемых в течение активации инструмента 16, при содействии гидравлических цилиндров, но без потребности быть такой тяжелой, как это требуется некоторой обычной инструментальной оснасткой. Таким образом, С-образная стержневая конструкция 14 может переноситься роботом 10 таким образом, чтобы управляемым способом быть установленной в положение относительно обрабатываемой детали, такой как консоль 12 крыла. Таким образом, результирующий производственный процесс, такой как клепальные операции, выполняемые в отношении обрабатываемой детали, может быть выполнен более быстро и эффективно в соответствии с примерным вариантом осуществления настоящего изобретения.
Многие модификации и другие варианты осуществления, изложенные в настоящем документе, будут очевидны специалистам в области техники, к которой принадлежат эти варианты осуществления, и имеющие преимущества идей, представленных в вышеприведенном описании и на связанных чертежах. Следовательно, следует понимать, что варианты осуществления не должны быть ограничены до раскрытых конкретных вариантов осуществления и что модификации и другие варианты осуществления предполагаются включенными в объем прилагаемой формулы изобретения. Кроме того, хотя вышеприведенные описания и связанные чертежи описывают примерные варианты осуществления в контексте некоторых примерных комбинаций элементов и/или функций, следует понимать, что различные комбинации элементов и/или функций могут быть обеспечены посредством альтернативных вариантов осуществления без отклонения от объема прилагаемой формулы изобретения. В связи с этим, например, различные комбинации элементов и/или функций, отличных от тех, которые были в явной форме описаны выше, также предполагаются, как те, которые могут быть указаны в некоторых пунктах формулы изобретения. Хотя в настоящем документе были применены конкретные термины, они использованы в общем и описательном смысле, а не с целью ограничения.
Альтернативные варианты осуществления могут быть заявлены следующим образом.
А1. С-образная стержневая конструкция для переноса инструмента, содержащая:
множество звеньев;
множество штифтов, соединяющих между собой указанные звенья для формирования конфигурации в виде фермы, соединенной штифтами, причем по меньшей мере одно из указанных звеньев выполнено с возможностью переноса инструмента, а конфигурация в виде фермы, соединенной штифтами, из указанных звеньев чувствительна к нагрузке, передаваемой на С-образную стержневую конструкцию в ответ на активацию инструмента, таким образом, что каждое звено находится в сжатии или растяжении; и
множество гидравлических цилиндров, соединенных с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену, причем первый гидравлический цилиндр выполнен с возможностью работы в режиме сжатия в ответ на деформацию внутри С-образной стержневой конструкции, связанную с активацией инструмента, а второй гидравлический цилиндр выполнен с возможностью нахождения в режиме растяжения в ответ на работу первого гидравлического цилиндра в режиме сжатия.
А2. С-образная стержневая конструкция по пункту А1, в которой первый и второй гидравлические цилиндры сообщаются по текучей среде таким образом, что гидравлическую жидкость, вытесняемая из первого гидравлического цилиндра в режиме сжатия, доставляется во второй гидравлический цилиндр.
A3. С-образная стержневая конструкция по пункту А2, в которой каждый из первого и второго гидравлических цилиндров содержит поршень, а первый гидравлический цилиндр выполнен с возможностью побуждения соответствующего поршня вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия.
А4. С-образная стержневая конструкция по пункту А1, дополнительно содержащая внешнюю гидравлическую управляющую систему, выполненную с возможностью направления гидравлической жидкости во второй гидравлический цилиндр в ответ на работу первого гидравлического цилиндра в режиме сжатия.
А5. С-образная стержневая конструкция по пункту А1, в которой звенья, выполненные с возможностью нахождения в растяжении, состоят из анизотропного материала.
А6. С-образная стержневая конструкция по пункту А5, в
которой звенья, выполненные с возможностью нахождения в растяжении, состоят из композиционного материала.
А7. С-образная стержневая конструкция по пункту А1, в которой звенья, выполненные с возможностью нахождения в сжатии, состоят из металла.
А8. Роботизированная система, содержащая:
робота, выполненного с возможностью обеспечения управляемого перемещения;
С-образную стержневую конструкцию, переносимую роботом, причем С-образная стержневая конструкция содержит конфигурацию в виде фермы, соединенной штифтами, содержащую множество звеньев, соединенных посредством штифтов, и множество гидравлических цилиндров, включая первые и вторые гидравлические цилиндры, соединенных с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену; и
инструмент, переносимый по меньшей мере одним из указанных звеньев,
причем конфигурация в виде фермы, соединенной штифтами, чувствительна к нагрузке, передаваемой на С-образную стержневую конструкцию в ответ на активацию инструмента посредством робота, таким образом, что каждое звено находится в сжатии или растяжении,
первый гидравлический цилиндр выполнен с возможностью работы в режиме сжатия в ответ на деформацию в С-образной стержневой конструкции, связанную с активацией инструмента, и
второй гидравлический цилиндр выполнен с возможностью нахождения в режиме растяжения в ответ на работу первого гидравлического цилиндра в режиме сжатия.
А9. Роботизированная система по пункту А8, в которой инструмент содержит клепальную машину.
А10. Роботизированная система по пункту А8, в которой первый и второй гидравлические цилиндры сообщаются по текучей среде таким образом, что гидравлическую жидкость, вытесняемая из первого гидравлического цилиндра в режиме сжатия, доставляется во второй гидравлический цилиндр.
A11. Роботизированная система по пункту А10, в которой каждый из первого и второго гидравлических цилиндров содержит поршень, а первый гидравлический цилиндр выполнен с возможностью побуждения соответствующего поршня вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия.
А12. Роботизированная система по пункту А8, дополнительно содержащая внешнюю гидравлическую управляющую систему, выполненную с возможностью направления гидравлической жидкости во второй гидравлический цилиндр в ответ на работу первого гидравлического цилиндра в режиме сжатия.
А13. Роботизированная система по пункту А8, в которой звенья, выполненные с возможностью нахождения в растяжении, состоят из анизотропного материала.
А14. Роботизированная система по пункту А13, в которой звенья, выполненные с возможностью нахождения в растяжении, состоят из композиционного материала.
А15. Роботизированная система по пункту А8, в которой звенья, выполненные с возможностью нахождения в сжатии, состоят из металла.
А16. Способ компенсирования отклонения при активации инструмента, включающий:
обеспечение С-образной стержневой конструкции, которая содержит конфигурацию в виде фермы, соединенной штифтами, содержащей множество звеньев, соединенных посредством штифтов, и множество гидравлических цилиндров, соединенных с указанным множеством звеньев таким образом, что каждый гидравлический цилиндр проходит параллельно соответствующему звену;
активацию инструмента, переносимого С-образной стержневой конструкцией, причем конфигурация в виде фермы, соединенной штифтами, из указанных звеньев чувствительна к нагрузке, передаваемой на С-образную стержневую конструкцию в ответ на активацию инструмента, таким образом, что каждое звено находится в сжатии или растяжении;
побуждение первого гидравлического цилиндра работать в режиме сжатия в ответ на деформацию в С-образной стержневой конструкции, связанную с активацией инструмента; и
побуждение второго гидравлического цилиндра работать в режиме растяжения в ответ на работу первого гидравлического цилиндра в режиме сжатия.
А17. Способ по пункту А16, дополнительно включающий перенос С-образной стержневой конструкции роботом, причем активация инструмента включает активацию клепальной машины.
А18. Способ по пункту А16, в котором побуждение первого гидравлического цилиндра работать в режиме сжатия включает вытеснение гидравлической жидкости из первого гидравлического цилиндра в режиме сжатия, а побуждение второго гидравлического цилиндра работать в режиме растяжения включает доставку гидравлической жидкости, вытесненной из первого гидравлического цилиндра, во второй гидравлический цилиндр.
А19. Способ по пункту А18, в котором каждый из первого и второго гидравлических цилиндров содержит поршень, а вытеснение гидравлической жидкости из первого гидравлического цилиндра в режиме сжатия включает побуждение соответствующего поршня вытеснять гидравлическую жидкость из первого гидравлического цилиндра в режиме сжатия.
А20. Способ по пункту А16, в котором побуждение первого гидравлического цилиндра работать в режиме сжатия включает побуждение вытеснения гидравлической жидкости из первого гидравлического цилиндра во внешнюю гидравлическую управляющую систему, а побуждение второго гидравлического цилиндра работать в режиме растяжения включает побуждение внешней гидравлической управляющей системы направлять гидравлическую жидкость во второй гидравлический цилиндр в ответ на работу первого гидравлического цилиндра в режиме сжатия.
Активатор для управления потоком плазмы и способ управления потоком плазмы
Устройство и способ управления потоком плазмы на задней кромке аэродинамического профиля
Система управления потоком с использованием плазменного актуатора и способ ее использования для управления потоком, обтекающим оружейный отсек высокоскоростного подвижного носителя
Усиленные элементы жесткости и способ их изготовления
Нагнетательное насосное устройство с диэлектрическим барьером и способ формирования такого устройства
Система с датчиками
Регистрация радиолокационных импульсов посредством цифрового радиолокационного приемника
Полурычажное шасси и способ размещения балки тележки такого шасси
Инструмент в виде шаблона и способ для быстрого ремонта композитной структуры
Малошумящая система предкрылка с элеметами, размещенными в передней кромке крыла и выполненными с возможностью развертывания
Активатор для управления потоком плазмы и способ управления потоком плазмы
Устройство и способ управления потоком плазмы на задней кромке аэродинамического профиля
Система управления потоком с использованием плазменного актуатора и способ ее использования для управления потоком, обтекающим оружейный отсек высокоскоростного подвижного носителя
Усиленные элементы жесткости и способ их изготовления
Нагнетательное насосное устройство с диэлектрическим барьером и способ формирования такого устройства
Система с датчиками
Регистрация радиолокационных импульсов посредством цифрового радиолокационного приемника
Полурычажное шасси и способ размещения балки тележки такого шасси
Инструмент в виде шаблона и способ для быстрого ремонта композитной структуры
Малошумящая система предкрылка с элеметами, размещенными в передней кромке крыла и выполненными с возможностью развертывания

