Результат интеллектуальной деятельности: УПРАВЛЕНИЕ КОМПЛЕКСАМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ
Вид РИД
Изобретение
ТЕХНИЧЕСКАЯ ОСНОВА
Настоящее изобретение относится к управлению (например, автоматизированному) работами в стволе скважины для добычи углеводородов из подземных продуктивных пластов.
УРОВЕНЬ ТЕХНИКИ
Бурение для добычи углеводородов, таких как нефть и газ, как правило, заключается в работе бурового оборудования в подземных глубинах, которые могут достигать тысяч футов под поверхностью. Такая труднодоступная удаленность скважинного бурового оборудования в сочетании с непредсказуемыми условиями эксплуатации в скважине и вибрационными возмущениями бурения создает многочисленные проблемы для точного управления траекторией ствола скважины. Зачастую эти проблемы осложняются наличием соседних стволов скважин, иногда в непосредственной близости друг от друга, что ограничивает допуск для ошибки бурения. В процессе буровых работ, как правило, накапливаются замеры от скважинных датчиков, расположенных вблизи скважинного бурового оборудования, для выявления различных условий, связанных с бурением, таких как расположение и угол траектории ствола скважины, технические характеристики горной породы, давление, температура, акустика, радиация и т.д. Такие данные замеров датчика, как правило, передаются на поверхность, где операторский персонал анализирует данные для выполнения корректировки внутрискважинного бурового оборудования. Однако замеры датчика могут быть неточными, запаздывающими или редкими, что снижает эффективность использования таких замеров. Часто при управлении работой бурения операторскому персоналу остается использовать наилучшие прогнозы относительно траектории ствола скважины.
ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
На Фиг. 1 проиллюстрирован пример реализации по меньшей мере участка системы ствола скважины в контексте работы внутри скважины;
На Фиг. 2 проиллюстрирована блок-схема типового процесса настраиваемого робастного управляющего устройства буровых систем;
Фиг. 3A иллюстрирует график типовой реакции частотного интервала на отклонения от номинальной модели из-за неопределенности;
Фиг. 3В иллюстрирует график типовой реакции временного интервала систем, управляемых контроллером (в условиях неопределенности), предназначенным для номинальной модели;
Фиг. 3С иллюстрирует график типовой реакции временного интервала систем, управляемых робастным контроллером (в условиях неопределенности), разработанным для номинальной модели;
Фиг. 4 иллюстрирует график типовой реакции частотного интервала передаточной функции разомкнутого контура робастной управляемой системы, по сравнению с неуправляемыми системами;
На Фиг. 5А и 5В проиллюстрированы блок-схемы типовых процедур создания контроллеров робастной устойчивости;
Фиг. 6 иллюстрирует схему последовательности операций типового процесса разработки робастного контроллера (например, виртуального контроллера);
Фиг. 7A и 7B представляют собой схемы последовательностей операций, иллюстрирующие типовые процессы создания виртуального контроллера для скважинного бурового оборудования, основанные на номинальной модели динамики скважинного бурового оборудования и наборе моделей, которые отклоняются от номинальной модели;
Фиг. 8 иллюстрирует схему последовательности операций типового процесса обновления номинальной модели динамики скважинного бурового оборудования;
Фиг. 9 иллюстрирует схему последовательности операций типового процесса создания двух виртуальных контроллеров, которые используют различные критерии устойчивости; и
Фиг. 10 иллюстрирует блок-схему типовой системы управления, по которой могут работать некоторые примеры.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение описывает, как правило, автоматизированное управление скважинными работами бурения для повышения стабильности бурения в непредсказуемых и/или неизвестных условиях в стволе скважины. В частности, описаны технологии, в которых приблизительно подсчитывается модель динамики скважинного бурения, и контроллер (например, виртуальный контроллер) для внутрискважинного бурового оборудования (например, компоновки низа бурильной колонны, колонны бурильных труб или другого оборудования), предназначенный для удовлетворения критерию устойчивости, несмотря на возможные ошибки в приблизительно подсчитанной модели динамики скважинного бурения. В некоторых примерах, система может создать контроллер (например, виртуальный контроллер) для достижения желаемых эксплуатационных характеристик, в то же время который удовлетворяет критерию устойчивости, основанный на различных видах неопределенностей, возмущающих воздействиях и помехах в условиях скважины. В некоторых примерах, система может создать множество виртуальных контроллеров, каждый с отличающимся критерием устойчивости, и на основании меняющихся условий в скважине может адаптивно переключаться между множеством виртуальных контроллеров.
Внутрискважинное буровое оборудование, моделируемое и управляемое, может содержать, например, компоновку низа бурильной колонны (КНБК) или колонну бурильных труб, или какое-либо другое соответствующее внутрискважинное буровое оборудование или комбинацию внутрискважинного бурового оборудования. Виртуальный(е) контроллер(ы) может(гут) быть предусмотрен(ы) для внутрискважинного бурового оборудования или может(гут) быть предусмотрен(ы) для расположенной на поверхности системы, управляющей внутрискважинным буровым оборудованием. В качестве конкретного иллюстративного примера, пояснение ниже рассматривает сценарий управления КНБК, посредством обеспечения одним или более виртуальными контроллерами (например, контроллерами КНБК) расположенной над поверхностью системы управления, управляющей КНБК.
Система может отслеживать эффективность работы бурения и определять, следует ли обновить модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования). Если система определяет, что модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования) значительно отклоняется от замеров датчиков, тогда на основании обновленных данных замеров датчиков, система может идентифицировать новую модель динамики внутрискважинного бурового оборудования. Это обновление модели может предусматривать выполнение выбранной полностью другой модели, повторно линеаризовывающей ту же нелинейную модель, или выбор различных значений параметров для той же модели. В некоторых примерах, модель может быть управляемой данными, а не основываться на первопринципных методах расчета, и в этом случае при обновлении модель может выбирать различные параметры аппроксимации данных. В последнем случае, подгонка параметра может быть достигнута при помощи какой-либо подходящей технологии оценки, такой как метод наименьших квадратов, чтобы получить соответствующее отображение ввода-вывода, без необходимости разрабатывать модель механических взаимодействий в скважине.
В некоторых примерах, система может работать на двух разных временных шкалах. Например, система может создавать и обновлять контроллер для внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования) на более точной шкале времени (например, с использованием методик идентификации системы), а сам контроллер внутрискважинного бурового оборудования может контролировать бурение в стволе скважины на менее точной шкале времени. В частности, система может использовать более точную шкалу времени для обучения контроллера внутрискважинного бурового оборудования узнаванию истинных характеристик скважинной динамики, а на менее точной шкале времени контроллер внутрискважинного бурового оборудования может адаптировать входной управляющий сигнал внутрискважинного бурового оборудования, основанный на многократных замерах датчика.
В основном варианте реализации изобретения, реализуемый компьютером способ управления внутрискважинным буровым оборудованием включает определение номинальной модели динамики скважинного бурения на основании замеров датчика от внутрискважинного бурового оборудования; определение неопределенности для номинальной модели динамики скважинного бурения; определение, основанное на неопределенности для номинальной модели динамики скважинного бурения, набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения; и создание виртуального контроллера для внутрискважинного бурового оборудования на основе номинальной модели и набора моделей, которые отклоняются от номинальной модели.
Другие основные варианты реализации изобретения содержат соответствующие компьютерные системы, инструментарий и компьютерные программы, записанные на одно или более компьютерные устройства хранения данных, каждый из которых сконфигурирован для выполнения действия способов. Система одного или более компьютеров может быть сконфигурирована, чтобы выполнять операции для выполнения действий. Одна или более компьютерных программ могут быть сконфигурированы для выполнения конкретных операций или действий благодаря содержанию команд, которые при выполнении их устройством для обработки данных, побуждают это устройство выполнять указанные действия.
В первом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, создание виртуального контроллера для внутрискважинного бурового оборудования на основе номинальной модели и набора моделей, которые отклоняются от номинальной модели, включает создание виртуального контроллера для внутрискважинного бурового оборудования, который удовлетворяет критерию устойчивости для номинальной модели и который удовлетворяет критерию устойчивости для набора моделей, которые отклоняются от номинальной модели.
Во втором аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, создание виртуального контроллера для внутрискважинного бурового оборудования, который удовлетворяет критерию устойчивости для номинальной модели динамики скважинного бурения и который удовлетворяет критерию устойчивости для набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения, включает создание виртуального контроллера, который удовлетворяет критерию ограниченного входа-выхода для каждой модели в наборе моделей, которые отклоняются от номинальной модели динамики скважинного бурения.
В третьем аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, критерий ограниченного входа-выхода содержит критерий устойчивости по методологии Н-бесконечности.
В четвертом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, создание виртуального контроллера для внутрискважинного бурового оборудования, который удовлетворяет критерию устойчивости для номинальной модели динамики скважинного бурения и который удовлетворяет критерию устойчивости для набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения, включает создание случайного подмножества моделей из набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения; и создание виртуального контроллера, который удовлетворяет критерию устойчивости входа-выхода для каждой модели в случайном подмножестве моделей.
В пятом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, критерий устойчивости входа-выхода содержит по меньшей мере один из указанных: критерий устойчивости по методологии Н-бесконечности или критерий устойчивости H-2.
В шестом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, определение неопределенности для номинальной модели динамики скважинного бурения включает определение статистического распределения параметра номинальной модели динамики скважинного бурения, и определение, основанное на неопределенности для номинальной модели динамики скважинного бурения, набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения, включая определение набора случайных значений параметра, выбранных случайным образом из статистического распределения параметра.
Седьмой аспект, комбинируемый с каким-либо из основных вариантов реализации изобретения, дополнительно включает определение модели вибрационных возмущений для внутрискважинного бурового оборудования. В седьмом аспекте, создание виртуального контроллера для внутрискважинного бурового оборудования включает создание виртуального контроллера для внутрискважинного бурового оборудования, который удовлетворяет критерию устойчивости с учетом модели вибрационных возмущений.
В восьмом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, модель вибрационных возмущений содержит амплитудно-частотную характеристику номинальной модели динамики скважинного бурения, и создание виртуального контроллера для внутрискважинного бурового оборудования, который удовлетворяет критерию устойчивости с учетом модели вибрационных возмущений, включает создание виртуального контроллера, который подавляет частоты, при которых амплитудно-частотная характеристика номинальной модели динамики скважинного бурения имеет коэффициент усиления, превышающий пороговое значение коэффициента усиления.
Девятый аспект, комбинируемый с каким-либо из основных вариантов реализации изобретения, дополнительно включает выявление обновленных замеров датчика от внутрискважинного бурового оборудования; обнаружение того что, событие обновления модели, на основании обновленных данных замеров от датчиков, произошло; и обновление номинальной модели динамики скважинного бурения на основании обнаружения того, что событие обновления модели произошло.
Десятый аспект, комбинируемый с каким-либо из основных вариантов реализации изобретения, дополнительно включает получение высокоточных замеров датчика в соответствии с первой шкалой времени и обновление номинальной модели динамики скважинного бурения на основании высокоточных замеров датчика в соответствии с первой шкалой времени; а также конфигурирование виртуального контроллера для применения входных управляющих сигналов к внутрискважинному буровому оборудованию в соответствии со второй шкалой времени, которая менее точная, чем первая шкала времени, на основании низкоточных замеров датчика, получаемых в соответствии со второй шкалой времени.
В одиннадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, обнаружение того, что событие обновления модели произошло, включает определение порога дивергенции для номинальной модели динамики скважинного бурения; и определение того, что разница между номинальной моделью динамики скважинного бурения и замерами датчика превышает порог дивергенции.
В двенадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, определение порога дивергенции для номинальной модели динамики скважинного бурения дополнительно включает определение порога дивергенции на основании по меньшей мере одного из указанных: запланированной траектории ствола скважины или ограничения ошибок сопровождения ствола скважины.
В тринадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, обновление модели динамики скважинного бурения включает обновление параметра в номинальной модели динамики скважинного бурения. Тринадцатый аспект также включает обновление виртуального контроллера на основании обновленной модели динамики скважинного бурения.
В четырнадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, внутрискважинное буровое оборудование содержит по меньшей мере одно из указанных: компоновку низа бурильной колонны (КНБК) или колонну бурильных труб.
В пятнадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, создание виртуального контроллера для внутрискважинного бурового оборудования, который удовлетворяет критерию устойчивости для номинальной модели динамики скважинного бурения и который удовлетворяет критерию устойчивости для набора моделей, которые отклоняются от номинальной модели, включает определение первого виртуального контроллера, который удовлетворяет первому критерию устойчивости для номинальной модели динамики скважинного бурения и который удовлетворяет первому критерию устойчивости для набора моделей, которые отклоняются от номинальной модели; определение второго виртуального контроллера, который удовлетворяет второму критерию устойчивости для номинальной модели динамики скважинного бурения и который удовлетворяет второму критерию устойчивости для набора моделей, которые отклоняются от номинальной модели, при этом второй критерий устойчивости отличается от первого критерия устойчивости.
Шестнадцатый аспект, комбинируемый с каким-либо из основных вариантов реализации изобретения, дополнительно включает определение того, что событие, требующее переключения виртуального контроллера, произошло; и переключение между первым виртуальным контроллером и вторым виртуальным контроллером на основании определения того, что событие, требующее переключения виртуального контроллера, произошло.
В семнадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, определение того, что событие, требующее переключения виртуального контроллера, произошло, включает определение целевого стационарного значения входного управляющего сигнала для внутрискважинного бурового оборудования на основании номинальной модели динамики скважинного бурения ; сравнение стационарного значения входного управляющего сигнала для внутрискважинного бурового оборудования с измеренным значением входного управляющего сигнала для внутрискважинного бурового оборудования; и определение того, что разница между стационарным значением входного управляющего сигнала для внутрискважинного бурового оборудования и измеренным значением входного управляющего сигнала для внутрискважинного бурового оборудования превышает порог отслеживания.
В восемнадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, определение того, что событие, требующее переключения виртуального контроллера, произошло, включает определение запланированной траектории ствола скважины; и определение, исходя из запланированной траектории ствола скважины того, что вероятность пересечения с другим стволом скважины превышает порог пересечения с другим стволом скважины, или что радиус кривизны запланированной траектории ствола скважины уменьшается ниже порогового значения радиуса.
Девятнадцатый аспект, комбинируемый с каким-либо из основных вариантов реализации изобретения, дополнительно включает определение, на основании виртуального контроллера для внутрискважинного бурового оборудования, входного управляющего сигнала для внутрискважинного бурового оборудования, основанного на замерах датчика от внутрискважинного бурового оборудования; и применение входного управляющего сигнала к внутрискважинному буровому оборудованию.
В двадцатом аспекте, комбинируемом с каким-либо из основных вариантов реализации изобретения, определение входного управляющего сигнала для внутрискважинного бурового оборудования включает определение по меньшей мере одного из указанных: нагрузки на долото, скорости бурения, скорости потока флюида, крутящего момента на долоте, крутящего момента на роторном столе, или числа оборотов в минуту (RPM).
Различные варианты реализации системы управления бурением ствола скважины в соответствии с настоящим раскрытием изобретения могут не содержать, содержать одну или несколько из следующих особенностей. Например, система может повышать стабильность и эффективность буровых работ. В частности, технологии, описанные в контексте настоящего изобретения, могут обеспечить возможность автоматизированного управления внутрискважинным буровым оборудованием (например, КНБК, колонной бурильных труб или другим оборудованием), которое устойчиво как к модельной неустойчивости, так и к случайным помехам при бурении. В некоторых примерах, система может улучшить точность работ бурения и более внимательно отслеживать запланированную траекторию ствола скважины с меньшим количеством отклонений посредством одновременной адаптации к небольшим изменениям условий в стволе скважины (на менее точной шкале времени), а также адаптируясь к бὸльшим изменениям условий в стволе скважины (на более точной шкале времени). Таким образом, система может улучшить эффективность и стоимость буровых работ за счет снижения рисков осложнений при бурении, вызванных неопределенностью.
Подробности одного или более вариантов реализации изобретения изложены в прилагаемых графических материалах и в нижеприведенном описании. Другие признаки, цели и преимущества изобретения станут очевидными из описания и графических материалов, а также из формулы изобретения.
Фиг. 1 иллюстрирует участок одного из вариантов реализации системы 100 отклоненного ствола скважины в соответствии с настоящим раскрытием изобретения. Хотя проиллюстрирована отклоненная система (например, с направленным, горизонтальным или изогнутым по радиусу стволом скважины), система может содержать только относительно вертикальный ствол скважины (например, включая нормальные буровые колебания), а также другие виды стволов скважины (например, боковые или же стандартные стволы скважины). Кроме того, хотя система 100 показана на поверхности земли, условия ее размещения могут быть под водой или на водной основе. Как правило, система 100 отклоненного ствола скважины достигает одного или более подземных пластов, и обеспечивает более легкую и более эффективную добычу углеводородов, расположенных в таких подземных пластах. Также, система 100 отклоненного ствола скважины может создавать возможности для более легкого и более эффективного разрыва пласта или работ по интенсификации добычи. Как проиллюстрировано на Фиг. 1, система 100 отклоненного ствола скважины содержит буровую компоновку 104, установленную на земной поверхности 102. Буровая компоновка 104 может использоваться для формирования вертикального участка ствола скважины 108, пролегающего от земной поверхности 102 через один или более геологических пластов Земли. Один или более подземных пластов, таких как продуктивный пласт 126, расположены под земной поверхностью 102. Как будет пояснено более подробно ниже, одна или более обсадных колонн ствола скважины, таких как кондукторная обсадная колонна 112 и промежуточная обсадная колонна 114, могут быть установлены по меньшей мере в части вертикального участка ствола скважины 108.
В некоторых вариантах реализации изобретения, буровая компоновка 104 может быть установлена на водной поверхности, а не на земной поверхности 102. Например, в некоторых вариантах реализации изобретения, земной поверхностью 102 может быть океан, залив, море или какая-либо другая водная поверхность, под которой могут быть найдены нефтегазоносные пласты. Короче говоря, указание на земную поверхность 102 включает как земную, так и водную поверхности и предусматривает формирование и/или разработку одной или более систем 100 отклоненного ствола скважины из одного из двух или обоих мест расположения.
В целом, буровая компоновка 104 может быть любой соответствующей компоновкой или буровой установкой, применяемой для формирования стволов скважины или скважин в Земле. В буровой компоновке 104 могут использоваться технологии для формирования таких стволов скважины, таких как вертикальный участок ствола скважины 108, или могут использоваться нетрадиционные или новые технологии. В некоторых вариантах реализации изобретения, в буровой компоновке 104 может применяться оборудование для роторного бурения для формирования таких стволов скважины. Оборудование для роторного бурения широко известно и может состоять из колонны бурильных труб 106 и компоновки низа бурильной колонны (КНБК) 118. В некоторых вариантах реализации изобретения, буровая компоновка 104 может состоять из роторной буровой установки. Вращающееся оборудование на такой роторной буровой установке может состоять из компонентов, которые служат для вращения бурового долота, образующего в свою очередь ствол скважины, такой как вертикальный участок ствола скважины 108, все глубже и глубже в земле. Вращающееся оборудование состоит из множества компонентов (здесь показаны не все), которые сами способствуют передаче мощности от первичного привода к буровому долоту. Первичный привод доставляет мощность к роторному столу или системе верхнего прямого привода, которая в свою очередь доставляет мощность вращения к колонне бурильных труб 106. Колонна бурильных труб 106, как правило, прикреплена к буровому долоту внутри компоновки низа бурильной колонны 118. Шарнирный анкер, прикрепленный к грузоподъемному оборудованию, переносит значительную, если не всю, массу колонны бурильных труб 106, но может допускать ее свободное вращение.
Колонна бурильных труб 106, как правило, состоит из секций тяжелой стальной трубы, которые имеют резьбу, таким образом они могут сцепляться вместе. Ниже буровой трубы находятся одна или более утяжеленных буровых труб, которые тяжелее, толще и крепче, чем буровая труба. Резьбовые утяжеленные буровые трубы помогают добавить нагрузку на колонну бурильных труб 106 выше бурового долота с целью обеспечения достаточного давления сверху вниз на буровое долото, что позволяет долоту бурить сквозь один или более геологических пластов. Количество и сущность утяжеленных буровых труб на какой-либо конкретной роторной буровой установке может изменяться в зависимости от условий в скважине, с которыми столкнулись в процессе бурения.
Буровое долото, как правило, расположено внутри или прикреплено к компоновке низа бурильной колонны 118, которая расположена в скважинном конце колонны бурильных труб 106. Буровое долото в первую очередь отвечает за контактирование с материалом (например, камнем) внутри одного или более геологических пластов и бурение сквозь такой материал. В соответствии с настоящим описанием изобретения, вид бурового долота может быть выбран в зависимости от типа геологического пласта, встречающегося в процессе бурения. Например, в различных геологических пластах, встречающихся в процессе бурения, может потребоваться применение различных буровых долот для достижения максимальной эффективности бурения. Буровые долота могут быть видоизменены из-за таких различий в пластах или из-за испытываемого износа буровых долот. Хотя такая деталь не имеет решающего значения для настоящего раскрытия, в целом существует четыре вида буровых долот, каждый из которых подходит для конкретных условий. Указанные четыре наиболее распространенные вида буровых долот состоят из: замедленных или лопастных долот, стального бура для шарошечных долот, компактных долот с поликристаллическими алмазами, и алмазных долот. Вне зависимости от конкретных выбранных буровых долот, непрерывное удаление "бурового шлама" имеет важное значение для вращательного бурения.
Циркуляционная система работы вращательного бурения, такой как буровая компоновка 104, может быть дополнительным компонентом буровой компоновки 104. В целом, циркуляционная система имеет ряд основных задач, включая охлаждение и смазывание бурового долота, удаление бурового шлама из бурового долота и ствола скважины и нанесение покрытия из глинистой корки на стенки ствола скважины. Циркуляционная система состоит из бурового раствора, который циркулирует вниз через ствол скважины в течение всего процесса бурения. Как правило, компоненты циркуляционной системы содержат насосы флюида, компрессоры, связанные с водопроводной арматурой, и специальные форсунки для добавления присадок к буровому раствору. В некоторых вариантах реализации изобретения, таких как, например, в процессах горизонтального или наклонно-направленного бурения, забойные двигатели могут использоваться в сочетании с или в компоновке низа бурильной колонны 118. Таким забойным двигателем может быть гидравлический забойный двигатель с газотурбинным исполнением или винтовым исполнением, такой как двигатель Муано. Эти двигатели получают буровой флюид через колонну бурильных труб 106 и выполняют вращение для приведения в действие бурового долота или изменения направлений в процессе бурения.
Во многих работах вращательного бурения, буровой флюид закачивается книзу по колонне бурильных труб 106 и выходит через отверстия или насадки в буровом долоте. Затем флюид течет вверх по направлению к поверхности 102 внутри кольцевого пространства (например, затрубного пространства) между участком ствола скважины 108 и колонной бурильных труб 106, вынося суспензию бурового шлама к поверхности. Буровой флюид, как и буровое долото, может быть выбран в зависимости от типа геологических условий, обнаруженных под земной поверхностью 102. Например, при определенных обнаруженных геологических условиях и в некоторых подземных пластах может потребоваться, чтобы в качестве бурового раствора использовалась жидкость, такая как вода. В таких ситуациях, для завершения работы бурения может потребоваться свыше 378,54 кубических метров (100,000 галлонов) воды. Если вода сама по себе не пригодна для вынесения бурового шлама из отверстия скважины или не обладает достаточной плотностью, чтобы управлять давлением в скважине, для образования бурового флюида (например, бурового глинистого раствора) к воде могут быть добавлены глинистые добавки (бентонит) или добавки на полимерной основе. Как уже отмечалось выше, могут быть требующие решения проблемы, касающиеся применения таких добавок в подземных пластах, которые могут прилегать к или находиться вблизи подземных пластов, содержащих пресную воду.
В некоторых вариантах реализации изобретения, буровая компоновка 104 и компоновка низа бурильной колонны 118 могут работать с воздухом или пеной в качестве бурового раствора. Например, в процессе пневматического роторного бурения, сжатый воздух поднимает буровой шлам, производимый буровым долотом, вертикально вверх через затрубное пространство к земной поверхности 102. Компрессоры большой производительности могут подводить воздух, который затем прижимается книзу колонны бурильных труб 106 и в конечном итоге выходит через небольшие отверстия или насадки в буровом долоте. Буровой шлам, перемещенный к земной поверхности 102, затем собирается.
Как было отмечено выше, выбор бурового флюида может зависеть от типа геологических пластов, встречающихся в процессе буровых работ. Также, на это решение может оказывать влияние вид бурения, такой как вертикальное бурение, горизонтальное бурение, или наклонно-направленное бурение. В некоторых случаях, например, определенные геологические пласты могут быть более пригодными для пневматического бурения при вертикальном бурении, по сравнению с наклонно-направленным или горизонтальным бурением.
Как проиллюстрировано на Фиг. 1, компоновка низа бурильной колонны 118, включая буровое долото, пробуривает или создает вертикальный участок ствола скважины 108, который пролегает от земной поверхности 102 по направлению к целевому поземному пласту 124 и продуктивному пласту 126. В некоторых вариантах реализации изобретения, целевым подземным пластом 124 может быть геологический пласт, поддающийся пневматическому бурению. К тому же, в некоторых вариантах реализации изобретения, продуктивным пластом 126 может быть геологический пласт, который в меньшей степени поддается процессам пневматического бурения. Как проиллюстрировано на Фиг. 1, продуктивный пласт 126 непосредственно примыкает к и расположен под целевым пластом 124. Альтернативно, в некоторых вариантах реализации изобретения, может существовать один или более промежуточных подземных пластов (например, различные пласты камней или минералов) между целевым подземным пластом 124 и продуктивным пластом 126.
В некоторых вариантах реализации изобретения системы 100 отклоненного ствола скважины, вертикальный участок ствола скважины 108 может быть обсажен одной или более обсадными трубами. Как проиллюстрировано, вертикальный участок ствола скважины 108 содержит направляющую обсадную колонну 110, которая пролегает от земной поверхности 102 неглубоко в Землю. Часть вертикального участка ствола скважины 108, охваченная направляющей обсадной колонной 110, может быть больше диаметра ствола скважины. Например, эта часть вертикального участка ствола скважины 108 может быть 44,45 см (17-1/2”) ствола скважины с 34,0 см (13-3/8’’) направляющей обсадной колонной 110. Кроме того, следует отметить, что в некоторых вариантах реализации изобретения вертикальный участок ствола скважины 108 может быть смещен от вертикали (например, наклонный ствол скважины). Также еще, в некоторых вариантах реализации изобретения вертикальный участок ствола скважины 108 может быть ступенчатым в стволе скважины, таким образом, что участок бурится вертикально вниз, а затем изгибается, по существу, в горизонтальный участок ствола скважины. По существу, горизонтальный участок ствола скважины затем может быть повернут вниз ко второму, по существу, вертикальному участку, который затем поворачивает ко второму, по существу, горизонтальному участку ствола скважины. Кроме того, по существу вертикальный и горизонтальный участки ствола скважины могут быть добавлены в зависимости от, например, типа земной поверхности 102, глубины одного или более целевых подземных пластов, глубины одного или более продуктивных подземных пластов, и/или других критериев.
Вниз по скважине от направляющей обсадной колонны 110 может находиться кондукторная обсадная колонна 112. Кондукторная обсадная колонна 112 может охватывать немного меньший ствол скважины и защищать вертикальный участок ствола скважины 108 от притока, например, пресноводных водоносных горизонтов вблизи земной поверхности 102. Вертикальный участок ствола скважины 108 может пролегать вертикально вниз по направлению к точке отклонения скважины от вертикали 120, которая может находиться между 152,4-304,8 м (500-1000 футов) выше целевого подземного пласта 124. Эта часть вертикального участка ствола скважины 108 может быть охвачена промежуточной обсадной колонной 114. Диаметр вертикального участка ствола скважины 108 в любой точке его длины, а также размер обсадной колонны какой-либо из вышеупомянутых обсадных колонн может быть соответствующим в зависимости от процесса бурения.
При достижении точки отклонения скважины от вертикали 120, буровые инструменты, такие как каротажное и измерительное оборудование, могут быть установлены в участке ствола скважины 108. В этой точке может быть определено точное местоположение компоновки низа бурильной колонны 118 и передано к земной поверхности 102. Также, при достижении точки отклонения скважины от вертикали 120, компоновка низа бурильной колонны 118 может быть изменена или отрегулирована таким образом, что подходящие инструменты наклонно-направленного бурения могут быть вставлены в вертикальный участок ствола скважины 108.
Как проиллюстрировано на Фиг. 1, изогнутый участок ствола скважины 128 и горизонтальный участок ствола скважины 130 были образованы внутри одного или более геологических пластов. Как правило, изогнутый участок ствола скважины 128 может быть пробурен начиная от скважинного конца вертикального участка ствола скважины 108 и отклонен от вертикального участка ствола скважины 108 в сторону заданного азимута, увеличиваясь между от 9 до 18 градусов угла за 100 пробуренных футов. В альтернативном варианте, иной заданный азимут может использоваться для бурения изогнутого участка ствола скважины 128. При бурении изогнутого участка ствола скважины 128 компоновка низа бурильной колонны 118 часто применяет оборудование для измерения во время бурения (“ИВБ”) для более точного определения местоположения бурового долота внутри одного или более геологических пластов, таких как целевой подземный пласт 124. В целом, оборудование ИВБ может применяться для направленного управления буровым долотом в ходе того, как оно образует изогнутый участок ствола скважины 128, а также горизонтальный участок ствола скважины 130.
В качестве альтернативы или в дополнение к ИВБ данным, собранным в процессе бурения участков ствола скважины, показанных на Фиг. 1, определенные высокоточные замеры (например, геофизические исследования) могут быть приняты в процессе бурения участков ствола скважины. Например, геофизические исследования могут приниматься периодически во времени (например, в определенное время в процессе бурения), периодически по длине ствола скважины (например, на определенных пробуренных расстояниях, таких как каждые 13.61 м (30 футов) или иным образом), или при необходимости или по желанию (например, когда имеется опасение относительно траектории ствола скважины). Как правило, в процессе геофизического исследования, полный замер наклона и азимута местоположения в скважине (как правило, общая глубина в момент замера) производится для того, чтобы знать, с достаточной степенью точности, что правильная или конкретная траектория ствола соблюдается (например, в соответствии с планом ствола скважины). Кроме того, может быть полезно знать расположение в случае, если должна быть пробурена разгрузочная скважина. Высокоточные замеры могут содержать угол наклона от вертикали и азимут (или компасный курс) ствола скважины, если направление траектории критически важное. Эти высокоточные замеры могут быть сделаны в отдельных точках скважины, и приблизительная траектория ствола скважины рассчитывается из указанных отдельных точек. Указанные высокоточные замеры могут быть сделаны каким-либо соответствующим датчиком высокой точности. Примеры включают, например, простые приборы маятникового типа в совокупности с электронными акселерометрами и гироскопами. Например, при простых замерах маятника, положение свободно висящего маятника по отношению к сети наблюдений (прикрепленной к корпусу измерительного инструмента и выполняющую представление траектории ствола скважины) фиксируется на фотопленку. Пленку проявляют и изучают после извлечения прибора из ствола скважины, либо на каротажном кабеле или в следующий раз, при поднимании бурильной колонны из отверстия.
Горизонтальный участок ствола скважины 130 может, как правило, быть протянут на сотни, если не тысячи, футов внутри целевого подземного пласта 124. Хотя проиллюстрированный на Фиг. 1 горизонтальный участок ствола скважины 130 точно перпендикулярен вертикальному участку ствола скважины 108, следует понимать, что направленно пробуренные стволы скважины, такие как горизонтальный участок ствола скважины 130, имеют некоторую вариативность в своих траекториях. Следовательно, горизонтальный участок ствола скважины 130 может содержать “зигзаг” траекторию, все еще остающуюся в целевом подземном пласте 124. Как правило, горизонтальный участок ствола скважины 130 пробуривается к заданной конечной точке 122, которая, как было отмечено выше, может находиться вплоть до тысячи футов от точки отклонения скважины от вертикали 120. Как было отмечено выше, в некоторых вариантах реализации изобретения изогнутый участок ствола скважины 128 и горизонтальный участок ствола скважины 130 могут быть образованы с применением процесса пневматического бурения, в котором в качестве бурового раствора используется воздух или пена.
Система 100 ствола скважины также содержит систему управления 132, которая находится в коммуникации с КНБК 118. Система управления 132 может быть расположена на буровой площадке (например, на или вблизи буровой компоновки 104, либо над поверхностью или под землей) или может быть удалена от буровой площадки (например, в удаленном местоположении и в коммуникации с компонентами буровой площадки с использованием одного или более механизмов связи). Система управления 132 также может быть в коммуникации с другими системами, устройствами, базами данных и информационными сетями. В целом, система управления 132 может включать компьютер на основе процессора или компьютеры (например, настольный компьютер, ноутбук, сервер, мобильное устройство, мобильный телефон или другие), содержащие запоминающее устройство (например, магнитное, оптическое, RAM/ROM, съемное, дистанционное или локальное), сетевой интерфейс (например, программное обеспечение/интерфейс на основе аппаратных средств), а также одно или несколько периферийных устройств ввода-вывода (например, устройства отображения, клавиатура, мышь, сенсорный экран, и другие).
Система управления 132 может по меньшей мере частично контролировать, управлять и выполнять операции, связанные с работой бурения внутрискважинного бурового оборудования. В некоторых аспектах, система управления 132 может прогнозировать динамику модели внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования) и создавать контроллер (например, виртуальный контроллер) внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования) для удовлетворения критерию устойчивости. Контроллер внутрискважинного бурового оборудования (например, виртуальный контроллер) может быть включен в систему управления 132 (в качестве подкомпонента или модуля), или может быть отдельным от системы управления 132 (например, как часть внутрискважинного КНБК 118). Система управления 132 может управлять и регулировать один или более из проиллюстрированных компонентов системы 100 ствола скважины в динамичном режиме, как например, в режиме реального времени в процессе буровых работ в системе 100 ствола скважины. Управление в режиме реального времени может корректироваться на основании данных замеров датчика или на основании изменения прогнозирования траектории ствола скважины, даже без каких-либо замеров датчиков.
Система управления 132 может выполнять такие операции управления на основании динамики модели внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования). Модель динамики внутрискважинного бурового оборудования может моделировать различные физические явления в процессе бурения, такие как вибрационные возмущения и шум датчика. Система управления 132 может применять модель динамики внутрискважинного бурового оборудования для создания контроллера внутрискважинного бурового оборудования (например, виртуального контроллера), который удовлетворяет критерию устойчивости, при достижении желаемых эксплуатационных характеристик (например, следование по запланированной траектории ствола скважины с максимальной скоростью бурения). В целом, модель динамики внутрискважинного бурового оборудования может опираться на положенную в основу переменную состояния, которая изменяется со временем, отображая изменяющиеся в процессе бурения условия. Переменная состояния в модели динамики внутрискважинного бурового оборудования может быть предварительным подсчетом истинного состояния внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования), из которого может быть получена траектория ствола скважины.
Поскольку условия внутри скважины могут быть точно не известны, модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования) может быть неправильной. Буровая система может подвергаться различным динамикам, таким как нелинейные, спаренные динамики, включающие изменяющиеся во времени взаимодействия “сверло-горная порода”, взаимодействия “жидкость-структура”, усложненные запланированные формы ствола скважины, и силы удара/трения между буровой трубой и ее обсадкой. Во многих сценариях бурения трудной задачей является разработка точной модели, способной воспроизвести истинную динамику внутрискважинного бурового оборудования. Во многих случаях, упрощенные модели (например, модели сосредоточенной массы или конечно-элементные модели) выводятся и применяются для создания контроллера внутрискважинного бурового оборудования (например, виртуального контроллера), как правило, с различными упрощениями, такими как упрощение модели, линеаризация вокруг заданной конфигурации (с допущениями небольшого бокового перемещения), без воздействия флюида и простыми взаимодействиями “долото-горная порода”.
Однако, в действительности модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования) не может точно отражать истинную динамику скважинных операций Часто несоответствие между моделью и действительностью упоминается как неопределенность параметров модели. Вследствие неопределенности параметров модели, контроллеры внутрискважинного бурового оборудования, созданные на основании частной модели, при применении к реальной колонне бурильных труб могут привести к неожиданному поведению, и даже нестабильности, которая может привести к повреждению долота или даже повредить скважину. Технологии, описанные в контексте настоящего изобретения, могут предусматривать технологии управления, которые могут улучшить стабильность контроллеров внутрискважинного бурового оборудования, в то же время также удовлетворяя требованиям к характеристикам бурения.
На Фиг. 2 проиллюстрирована блок-схема типового процесса настраиваемого робастного контроллера буровых систем. В данном примере, процесс 200 создает контроллеры внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования), основанные как на формировании контура H-бесконечность (“H-inf-LS”), так и создании рандомизированного алгоритма (“RA”). Проиллюстрированный процесс 200 разделен на два участка, соответствующих динамике более точной шкалы времени 202 и динамике менее точной шкалы времени 204. Две шкалы времени могут быть реализованы в равной степени в различных физических компонентах (например, в системе управления 132 и КНБК 118), или в одном и том же физическом компоненте (например, обе в системе управления 132). Более точная динамика 202 может быть реализована, например, в контроллере, расположенном над поверхностью или другом модуле, имеющем вычислительные ресурсы для обработки сложных расчетов. Например, компоненты с большой производительностью по обработке данных могут выполнять такие операции, как идентификация системы (“SysID”) и создание робастного контроллера, на более точной шкале времени. В некоторых примерах, более точная динамика 202 может приблизительно подсчитывать модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования) и создавать контроллер внутрискважинного бурового оборудования (например, виртуального контроллера), который адаптируется к медленно изменяющимся переменным, таким как геологические горизонты, изменения формы запланированного ствола скважины, механика горных пород, износ долота, и т.п. Менее точная динамика 204 может быть реализована, например, во внутрискважинном буровом оборудовании или другом модуле, имеющем более ограниченные вычислительные ресурсы. Менее точная динамика 204 может адаптировать контроллер внутрискважинного бурового оборудования к быстро изменяющимся переменным, таким как вращательное и осевое перемещение колонны бурильных труб, включая число оборотов в минуту (RPM) на долоте, WOB, а также скорость потока и давление.
Замеры датчика на более точной шкале времени могут быть определены при помощи модуля наблюдения 206 более точной шкалы времени. Например, модуль наблюдения 206 более точной шкалы времени может определять результаты замеров геофизического исследования или каротажа, такие как изменение геологического горизонта, изменения запланированной формы ствола скважины, изменения в механике горных пород, и износ долота. Такие результаты замеров более точной шкалы времени можно определять в периодические интервалы, обозначаемые в контексте данного изобретения в целом как T.
Замеры датчика на менее точной шкале времени могут быть определены при помощи модуля наблюдения 208 менее точной шкалы времени. Например, модуль наблюдения 208 менее точной шкалы времени может определять измерения датчика в процессе бурения (ИВБ) для менее точной динамики, такие как осевое и вращательное перемещение системы. Дополнительно или альтернативно, такая менее точная динамика может быть приблизительно подсчитана или спрогнозирована (например, в режиме реального времени) при помощи модели динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования).
Модуль идентификации системы и прогнозирования 210 может получать данные от модулей наблюдения 206 и 208, и может прогнозировать модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования). В некоторых примерах, модуль идентификации системы и прогнозирования 210 может определять как модель стационарного состояния, так и модель динамики. Модель стационарного состояния буровой системы может включать, например, имеющийся геологический горизонт, модель механики горных пород и износа долота, и может включать вероятностную модель геологического горизонта, модель механики горных пород и износа долота на протяжении следующего T интервала. Вторая модель может быть моделью динамики буровой системы. Хотя модель динамики буровых систем может быть нелинейной изменяющейся во времени моделью, в течение относительно короткого интервала T система может быть аппроксимирована линейной моделью (например, моделью сосредоточенной массы или конечных элементов). Линейная модель может быть предназначена для настроенного заранее заданного физического порядка, и в этом случае модуль идентификации системы и прогнозирования 210 может отвечать за выявление неизвестных параметров модели заданного порядка. Это часто упоминается как идентификация системы методом "серого ящика". Например, в модели сосредоточенной массы неизвестными параметрами являются коэффициенты жесткости и затухания, а также масса и инерция. Динамическая модель по интервалу T может быть спрогнозирована с обусловленными или вероятностными параметрами.
В некоторых примерах, прогнозы, как для модели стационарного состояния, так и для динамической модели могут основываться на данных от других скважин в месторождении с аналогичными пластами и механическими характеристиками горных пород, или из данных прошлых периодов. В конкретных примерах, модель стационарного состояния может игнорировать динамику переходного состояния и системные параметры модели при их значениях стационарного состояния (например, аналогичные кинематической модели), и модель динамики может моделировать переходное поведение параметров системы.
Модуль 212 анализирования/остаточного оценивания модели устанавливает точность идентифицированной модели динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования). Если отклонение (или остаток) между наблюдаемыми данными и идентифицированной системы модели динамики внутрискважинного бурового оборудования превышает допустимый уровень неопределенности (порог остатка), тогда модуль идентификации системы и прогнозирования 210 может пересчитать модель динамики внутрискважинного бурового оборудования. В ином случае, если остаток сохраняется в пределах допустимого уровня неопределенности, тогда модель динамики внутрискважинного бурового оборудования может оставаться неизменной на протяжении следующего T интервала. Независимо от того, точно отражает модель динамики внутрискважинного бурового оборудования скважинную систему или нет, реальная скважинная система может быть обоснована с помощью статистических методов испытаний. Для примера, если задано распределение неопределенности Гаусса, то пороговое значение остатка может быть установлено в положение, когда более 10% наблюдаемых данных выпадает из двух стандартных отклонений от среднего значения распределения Гаусса. Если данное пороговое значение превышено, тогда принимается решение о неэффективности модели и может быть рассчитана новая модель. Со временем, исторически установленная оценка остатка также может помочь уточнить ограничение по распределению неопределенности системы и таким образом повысить эффективность работы контроллера.
Пороговое значение остатка, которое запускает обновление модели, может быть связано с различными факторами. Например, одним фактором может являться запланированная траектория ствола скважины. Например, при наклонно-направленном бурении, когда запланированная траектория ствола скважины указывает на резкий поворот, может потребоваться модель динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб или другого оборудования) для более точного моделирования скважинной системы. В данном случае, небольшое пороговое значение остатка может оказаться желательным для того, чтобы модель динамики внутрискважинного бурового оборудования обновлялась чаще. Другим фактором, способным оказать влияние на пороговое значение остатка, являются технические характеристики робастного контроллера, управляющего внутрискважинным буровым оборудованием (например, робастного контроллера 220). В некоторых примерах, принятое в расчет предельное значение неопределенности может быть таким, что робастный контроллер 220, удовлетворяющий техническим условиям бурения, может быть реализован на практике. Для сценариев, в которых невозможно найти робастный контроллер, удовлетворяющий требованиям к техническим характеристикам (например, когда предельное значение неопределенности слишком высоко), модель может быть обновлена, например, для уменьшения предельного значения неопределенности для того, чтобы робастный контроллер мог быть разработан в соответствии с требованиями к техническим характеристикам.
Прогнозируемая модель стационарного состояния, объединенная с запланированной траекторией ствола скважины на протяжении последующего интервала T может быть передана к администраторскому робастному контроллеру 214 (например, виртуальному контроллеру), который может рассчитать оптимальное стационарное решение для подходящего входного управляющего сигнала внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования), такого как осевая нагрузка на долото (WOB), скорость бурения (ROP), скорость потока флюида, крутящий момент на долоте, крутящий момента на роторном столе, число оборотов в минуту (RPM), или другого подходящего входного управляющего сигнала для работы бурения. В некоторых примерах, администраторский робастный контроллер 214 может использовать рандомизированный алгоритм (RA) для расчета стационарного входного управляющего сигнала (например, оптимального стационарного входного сигнала, или недостаточно оптимального стационарного входного сигнала, или какого-либо другого подходящего стационарного входного сигнала, отвечающего требованиям) внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования) на основе распределения моделей внутрискважинного бурового оборудования. Эти стационарные значения входного управляющего сигнала внутрискважинного бурового оборудования могут использоваться, например, для отслеживания эксплуатационных характеристик, которые измеряют точность следования запланированной траектории ствола скважины с максимальной ROP.
Модуль воспроизведения возмущающих воздействий 216 порождает модель возмущающих воздействий (например, из-за вибраций). Модель возмущающих воздействий может быть определена, например, на основании принятых на менее точной шкале времени данных от датчика измерений во время бурения (ИВБ) или от прогнозного наблюдателя. Свойства возмущающих воздействий системы могут использоваться как часть разработки робастного контроллера (например, виртуального контроллера), который стабилизирует скважинную систему несмотря на нерегулярные вибрации и взаимодействия долото-горная порода. Пример моделирования возмущающих воздействий заключается в использовании частотного спектра скважинной динамики. Такой частотный спектр может быть приблизительно подсчитан, например, с применением быстрого преобразования Фурье (БПФ) к данным вращательного или осевого перемещения колонны бурильных труб. При сравнении с данными прошлых периодов или данными от заранее пробуренных скважин с аналогичными условиями бурения, какие-либо аномальные частоты, которым свойственна большая мощность, например, могут рассматриваться как частоты возмущающего воздействия. Частоты возмущающего воздействия могут передаваться к модулю создания робастного контроллера 218 для того, чтобы уменьшить динамическую нагрузку возмущающих воздействий на внутрискважинное буровое оборудование. Точная оценка возмущающих воздействий может дать возможность устранить возмущающие воздействия из процесса бурения, позволяя упреждающему контроллеру добавиться к системе для компенсации возмущающего воздействия.
Прогнозная модель динамики КНБК, порожденная в модуле идентификации системы и прогнозирования 210, объединенная с моделью возмущающих воздействий, порожденной в модуле воспроизведения возмущающих воздействий 216, передается в модуль создания динамичного робастного контроллера 218, где порождается робастный контроллер. В данном примере, получены контроллеры двух видов: RA и Hinf-LS. В целом, для достижения какого-либо желаемого критерия устойчивости и эксплуатационных характеристик может быть получено любое количество контроллеров любого вида. Эксплуатационные характеристики могут включать, в качестве примеров, устранение возмущающих воздействий, снижение перегрузки входным сигналом, или эффективное отслеживание опорного сигнала, и т.д. В буровой системе эти характеристики могут соответствовать устранению повреждающих вибраций долота, таких как подскакивание долота на забое, кручение и заклинка/проворот долота, уменьшая извилистость траектории бурения, и эффективно отслеживая значения желаемого стационарного состояния WOB, ROP, и скорости потока. В некоторых примерах, контроллеры RA и Hinf-LS могут быть порождены в программном оборудовании посредством решения ряда ограниченных линейных неравенств матриц.
Динамичные робастные контроллеры, созданные в модуле создания динамичного робастного контроллера 218, затем передаются к модулю робастного контроллера 220, где они вводятся в действие для управления внутрискважинным буровым оборудованием на менее точной шкале времени. В примере по Фиг. 2, присутствует два варианта контроллера в режиме реального времени: Hinf-LS контроллер 222 и RA контроллер 224 (например, виртуальные контроллеры), которые могут быть введены в действие модулем робастного контроллера 220 для управления внутрискважинным буровым оборудованием. Решение, который из виртуальных контроллеров использовать для управления буровым оборудованием в определенный момент времени, может зависеть от любого количества соответствующих факторов, относящихся к работе бурения. В некоторых примерах, решение может быть принято в режиме реального времени на основании условий бурения и/или технических требований бурения. В качестве конкретного примера, дифференцирующий элемент 226 может определять (например, в режиме реального времени) разницу между WOB, ROP и скоростью потока, измеренными или приблизительно подсчитанными из модуля ИВБ/наблюдатель 208 и значениями стационарного состояния WOB, ROP и скорости потока (например, оптимальные стационарные значения, недостаточно оптимальные стационарные значения, или другие соответствующие стационарные значения) как определено из администраторского робастного контроллера 214. Переключающий элемент 228 переключает между двумя подходящими контроллерами 222 и 224, в зависимости от разницы, рассчитанной дифференцирующим элементом 226, эксплуатационных характеристик бурения, и другой возможной информации (например, запланированной траектории ствола скважины). Например, Hinf-LS контроллер 222 может быть принят тогда, когда необходимо следовать эксплуатационным характеристикам бурения с большей определенностью. Например, когда буровое долото перемещается через тонкий слой геологического горизонта в процессе горизонтального бурения, тогда может быть желательно следовать по запланированной траектории ствола скважины с большей точностью. С другой стороны, RA контроллер 224 может быть принят тогда, когда эксплуатационные характеристики бурения могут незначительно нарушаться в ответ на активное продвижение. Например, в ситуации, когда приемлема немного большая извилистость траектории бурения, может оказаться желательным достигнуть более активной ROP.
Полученный в результате от модуля робастного контроллера 220 входной управляющий сигнал внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования) затем применяется к буровой системе 230 (например, буровой компоновке 104, или КНБК 118, или какому-либо соответствующему буровому оборудованию или комбинации бурового оборудования в системе 100 ствола скважины по Фиг. 1). Выходные управляющие сигналы буровой системы 230 в режиме реального времени могут включать, в качестве примеров, вращающий момент двигателя, вес на крюке и скорость насоса на поверхности. Выходные сигналы буровой системы могут быть измерены с использованием различных датчиков (например, датчиков искривления скважины 206 или ИВБ датчиков 208).
Фиг. 3A иллюстрирует график типовой реакции частотного интервала модели, отклоняющейся от номинальной модели из-за неопределенности. Фиг. 3B иллюстрирует график типовой реакции временного интервала соответствующих систем, управляемых контроллером (в условиях неопределенности), предназначенным для номинальной модели. Фиг. 3B иллюстрирует, что управляемая система может быть нестабильной из-за неопределенности.
В частности, на Фиг. 3A проиллюстрированы диаграммы Боде реакций частотных и фазовых интервалов передаточных функций 40 образцов отклонений от номинальной модели динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования) в условиях неопределенности. Образцы сгенерированы в пределах заданного предельного значения неопределенности из номинальной модели. Можно видеть, что набор моделей, которые отклоняются от номинальной модели, в значительной степени отличается в реакции частотного интервала от номинальной системы (показано крестовидной насечкой). На Фиг. 3B проиллюстрирована динамическая ошибка отслеживания для набора отклоненных моделей относительно начального импульсного возмущения (представленного пунктирной кривой), с использованием неробастного контроллера, предназначенного для номинальной модели динамики внутрискважинного бурового оборудования. Можно заметить, что хотя управляемая номинальная модель стабильна и успешно устранено воздействие импульсного возмущения (крестовидная насечка на Фиг. 3B), другие выборочные модели могут быть нестабильными от того же возмущения, с использованием одного и того же неробастного контроллера.
Фиг. 3C иллюстрирует график типовой реакции временного интервала систем, управляемых робастным контроллером (в условиях неопределенности), предназначенным для номинальной модели. Пример на Фиг. 3C иллюстрирует, что управляемые системы остаются стабильными в присутствии неопределенности. Пример на Фиг. 3C иллюстрирует динамическую ошибку отслеживания для набора отклоненных моделей относительно начального импульсного возмущения, с использованием робастного контроллера, предназначенного для номинальной модели. Можно заметить, что взятый в целом набор из 40 моделей, которые отклоняются от номинальной системы, остается стабильным и устраняет импульсное возмущение.
Фиг. 4 иллюстрирует график типового передаточной функции разомкнутого контура робастной управляемой системы, по сравнению с неуправляемыми системами. Пример на Фиг. 4 иллюстрирует устранение возмущений, основанное на создании контроллера в частотной области. На Фиг. 4 проиллюстрированы три выборочные диаграммы Боде (пунктирными линиями), соответствующие трем моделям, отклоняющимся от номинальной модели динамики (сплошная линия) внутрискважинного бурового оборудования. Каждая из трех моделей имеет пик, соответствующий, например, возмущению в различных рабочих точках, которое следует избежать. Разработанная управляемая система может иметь диаграмму Боде передаточной функции разомкнутого контура с удаленными пиками, например, в форме плавной кривой.
В некоторых примерах, набор моделей, которые отклоняются от номинальной модели, может использоваться для создание робастного стационарного контроллера для работы бурения. Например, набор моделей может отражать отклонения неопределенности от номинальной модели динамики бурения, и контроллер может быть создан для удовлетворения критерию устойчивости для одной или более из моделей, которые отклоняются от номинальной модели. Из сказанного следует, что такой контроллер может быть стационарным для работы бурения, даже если истинная динамика бурения отклоняется от номинальной модели. Набор моделей, которые отклоняются от номинальной модели, может быть определен на основании неопределенности, связанной с номинальной моделью. Например, если номинальная модель содержит параметр, тогда набор моделей, которые отклоняются от номинальной модели, может быть определен путем рассмотрения набора значений для параметра (например, диапазона значений или отдельных значений, и т.п.) и генерирования набора моделей в соответствии с набором значений для параметра. В данном примере, набор сгенерированных моделей может, таким образом, отражать неопределенность, связанную с номинальной моделью.
Критерий устойчивости может быть определен и отрегулирован, основываясь на желаемом уровне устойчивости к нарушениям исходных предпосылок для работы бурения. Например, критерий устойчивости может быть жестким критерием устойчивости, таким как критерий ограниченного входа-выхода (например, H-inf критерий устойчивости), для каждой модели в наборе моделей, которые отклоняются от номинальной модели. В качестве конкретного примера, набор моделей может соответствовать диапазону значений параметра, вплоть до определенного порогового значения параметра. Такой критерий может помочь гарантировать стабильную работу бурения для любого отклонения от до номинальной модели вплоть до этого конкретного порогового значения параметра.
В некоторых примерах, критерий устойчивости может быть более гибким, чем жесткий критерий устойчивости в предыдущем примере. Например, критерий устойчивости может включать рандомизированный критерий устойчивости, такой как тот, что используется в контроллере рандомизированного алгоритма (RA). Например, случайное подмножество моделей может быть сгенерировано из большего набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения. Виртуальный контроллер может быть создан для удовлетворения критерию устойчивости (например, H-inf, H-2, или любого другого целесообразного критерия устойчивости) для каждой модели в случайном подмножестве моделей (но не обязательно в большем наборе моделей). Случайное подмножество моделей может быть определено, например, путем определения случайного набора значений параметра и генерирования модели для каждого случайного значения параметра.
Случайное подмножество моделей может быть отобрано, например, для точного моделирования возможных отклонений, которые могут возникнуть из номинальной модели в процессе фактической работы бурения. В некоторых примерах, значения случайного подмножества моделей могут быть отобраны для исключения некоторых моделей, таких как модели, которые практически нецелесообразны или непривлекательны для реализации. В целом, включая больше моделей в случайное подмножество моделей, возможно создать более жесткое конструктивное ограничение (например, если контроллер должен стабилизировать бурение для всех моделей в подмножестве моделей), что приводит к устойчивому контроллеру, который подходит для стабилизации бурения в более широком диапазоне возможных отклонений. Таким образом, количество моделей в случайном подмножестве моделей, а также конкретный выбор моделей могут повлиять, насколько умеренно или активно происходит работа бурения.
На Фиг. 5А и 5В проиллюстрированы блок-схемы типовых процедур создания контроллеров робастной устойчивости. На Фиг. 5А проиллюстрирован типовой процесс 500 создания Hinf-LS контроллера 502. Hinf-LS представляет собой способ робастного управления в частотной области для линейных систем. Он может быть применен к системе колонны бурильных труб, которая линеаризируется вокруг различных рабочих точек, или когда существует линейная модель для описания буровой системы, такая как идентифицированная линейная модель, проиллюстрированная на графиках по Фиг. 3A, 3B, 3C и 4. В создании контроллера Hinf-LS, сингулярные значения разомкнутого контура номинальной модели 504 динамики внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого оборудования) могут быть проверены и сформированы пред- и/или пост- компенсационными весовыми функциями W1 (506) и W2 (508) таким образом, что номинальные требования к техническим характеристикам выполняются. В целом, коэффициент усиления разомкнутого контура может быть разработан, чтобы быть выше низкой частоты через предкомпенсационный вес W1 (506) для системы для лучшего следования за опорным сигналом или лучшего устранения возмущающих воздействий. В некоторых примерах, это может быть обусловлено опорным сигналом и возмущающими воздействиями, как правило, имеющими низкие значения частот. В частности, вес W1 может быть разработан, чтобы иметь фильтры на частотах, когда может случиться вибрационное повреждение долота, в результате чего функции чувствительности буровой системы будут ослаблены. Кроме того, коэффициент усиления разомкнутого контура может быть разработан, чтобы быть ниже высоких частот через W2 (508) для системы, чтобы учесть модельные неопределенности 510 и устранить помехи при замерах. В некоторых примерах, это может быть обусловлено модельными неопределенностями 510 и помехами при замерах, имеющими высокие значения частот.
Стабилизирующий контроллер 502 с требуемым стабилизирующим запасом (который может быть определен, например, предельным значением неопределенности между номинальной моделью и истинной динамикой колонны бурильных труб) затем может быть разработан для достижения взвешенной передаточной функции. Веса W1 и W2 могут подлежать корректировке итеративно до тех пор, пока полученный в результате управляемый запас устойчивости номинальной модели не будет соответствовать желаемому запасу устойчивости. По сравнению с обычным H-inf способом разработки, процедура разработки в Hinf-LS носит систематический характер и может включать только базовые знания по формированию контура и, таким образом, может быть более применима для корректировки в режиме реального времени.
На Фиг. 5B проиллюстрирован типовой процесс 512 разработки RA контроллера. В продолжение процесса бурения могут быть динамики и взаимодействия, которые трудно представить детерминированной моделью. Примеры такой динамики включают потерю вращательной энергии от верхнего привода к долоту в зависимости от конструкторских и относящихся к изгибу свойств колонны бурильных труб; формы ствола скважины; формы инструментов; изменения структуры сенсорных точек между бурильной колонной, стволом скважины и обсадной колонной; коэффициентов нормального и тангенциального восстановления начального расположения и контактного трения; совокупности многочастичного истирания и эрозии, происходящими между стволом скважины, бурильной колонной, флюидом и буровым шламом, и так далее. В некоторых примерах, указанные трудности могут быть охарактеризованы вероятностной моделью колонны бурильных труб, в которой параметрами, такими как коэффициенты жесткости и затухания колонны бурильных труб, коэффициенты трения взаимодействий “долото - твердая порода” в модели сосредоточенной массы, могут быть случайные переменные с определенным распределением, которые отражают истинные неопределенности системы бурения.
В сравнении с Hinf-LS контроллером, который может быть принят для робастного управления колонной бурильных труб, описанного детерминированной номинальной моделью, RA контроллер может быть принят для робастного управления колонной бурильных труб, описанного вероятностной моделью колонны бурильных труб. Разработанный RA контроллер не может гарантировать, что колонна бурильных труб отвечает требованиям к техническим характеристикам для всех событий неопределенности, представляющих интерес, но он может гарантировать, что колонна бурильных труб отвечает требованиям к техническим характеристикам с желаемой вероятностью для номинальной модели и связанных с ней отклонений.
В сравнении с H-inf контроллером, который предназначен для удовлетворения заданному эксплуатационному требованию для всех ограниченных событий неопределенности в колонне бурильных труб и может таким образом, оказаться относительно устойчивым контроллером, RA контроллер может иметь своим результатом более активный робастный контроллер, который удовлетворяет эксплуатационному требованию для большей части, но не всех, событий неопределенности. Типовая конструктивная разработка RA контроллера может осуществляться следующим образом: номинальная модель определяется частной моделью неопределенности (514). При каждой итерации k, N(k) и.н.р. (идентичной независимой распределенной) модели, отклоняющиеся от номинальной модели (516) генерируют в произвольном порядке. Случайные модели могут быть выбраны в соответствии с распределением неопределенностей передаточной функции или параметров номинальной модели. Величина N(k) может быть выбрана на основании какого-либо подходящего критерия, такого как предварительно определенная вероятность риска, допущенная в общей разработке контроллера, желаемый уровень активности бурения и т.д. Например, большие значения N(k) могут быть выбраны для достижения меньшей вероятности риска неустойчивости, за счет создания более устойчивого контроллера. И наоборот, меньшие значения N(k) могут быть выбраны (например, только те отклонения, которые наиболее вероятны, или те отклонения, чья вероятность возникновения выше порогового значения и т.д.) чтобы допустить большую вероятность риска неустойчивости, в процессе реализации более активной работы бурения. Дополнительно или в качестве альтернативы выбору количества моделей, могут быть выбраны или разработаны другие факторы, такие как вероятностная модель отклонений от номинальной модели, технологии, по которым отклонения модели отбираются из распределения моделей и т.д.
С самого начала может быть установлено исходное состояние (518) контроллера (например, виртуального контроллера), чтобы он был любым контроллером из возможного пула контроллеров. Например, контроллеры могут содержать H-inf контроллеры, или H2 контроллеры, или любой подходящий контроллер, разработанный с любым подходящим критерием устойчивости. При k-той итерации, набор N(k) моделей, которые отклоняются от номинальной модели, управляется подходящим контроллером θ(k). Если подходящему контроллеру θ(k) удается стабилизировать все N(k) модели для удовлетворения эксплуатационным характеристикам, тогда RA контроллер устанавливается равным θ(k) (520). Если контроллер θ(k) не в состоянии стабилизировать любую из N(k) моделей, тогда контроллер θ(k) и множество моделей N(k) обновляются для новой итерации (522). Этот процесс повторяется до тех пор, пока θ(k) не сведется к законченному решению стабилизации. Результирующий RA контроллер надежен для удовлетворения желаемым эксплуатационным характеристикам при предварительно определенном вероятностном критерии риска. Процесс 512, проиллюстрированный на Фиг. 5B является лишь одним примером разработки контроллера RA, и существуют другие виды алгоритмов разработки RA, которые могут быть приняты для разработки робастного контроллера модели колонны бурильных труб.
Фиг. 6 иллюстрирует схему последовательности операций типового процесса 600 разработки робастного контроллера. Один или более этапов типового процесса по Фиг. 6 может быть выполнено системой управления (например, системой управления 132 по Фиг. 1). В данном примере, система управления определяет номинальную модель динамики скважинного бурения (например, номинальную модель 504 по Фиг. 5A или номинальную модель 514 по Фиг. 5B, как определено, например, системой ID модуля 210 по Фиг. 2) на основании замеров датчика от внутрискважинного бурового оборудования (например, КНБК, колонны бурильных труб, или другого внутрискважинного бурового оборудования) (602). Затем система управления определяет неопределенность для номинальной модели динамики скважинного бурения (604). Далее система управления определяет, на основании неопределенности для номинальной модели динамики скважинного бурения, набор моделей, которые отклоняются от номинальной модели динамики скважинного бурения (606). Потом система управления создает виртуальный контроллер для внутрискважинного бурового оборудования на основе номинальной модели и набора моделей, которые отклоняются от номинальной модели (608).
Фиг. 7A и 7B иллюстрируют схемы последовательности операций примеров дополнительных подробностей создания виртуального контроллера для внутрискважинного бурового оборудования на основании номинальной модели динамики скважинного бурения и набора моделей, которые отклоняются от номинальной модели (например, 608 по Фиг. 6). На Фиг. 7A проиллюстрирован типовой процесс разработки контроллера H-бесконечность, в котором система управления (например, система управления 132 по Фиг. 1) создает виртуальный контроллер, который удовлетворяет критерию ограниченного входа-выхода для каждой модели в наборе моделей, которые отклоняются от номинальной модели динамики скважинного бурения (700). На Фиг. 7B, проиллюстрирован типовой процесс создания RA контроллера, в котором система управления (например, система управления 132 по Фиг. 1) генерирует случайное подмножество моделей из набора моделей, которые отклоняются от номинальной модели динамики скважинного бурения (702) и создает виртуальный контроллер, который удовлетворяет критерию устойчивости ввода-вывода (например, критерий устойчивости по методологии Н-бесконечности, или критерий устойчивости H-2, или рандомизированный критерий устойчивости, и т.д.) для каждой модели в случайном подмножестве моделей (704).
Фиг. 8 иллюстрирует схему последовательности операций типового процесса 800 обновления номинальной модели динамики скважинного бурения. В данном примере, система управления (например, система управления 132 по Фиг. 1) выявляет обновленные замеры датчика от внутрискважинного бурового оборудования (802). Система управления обнаруживает, что событие обновления модели произошло на основании обновленных замеров датчика (804) и обновляет номинальную модель динамики скважинного бурения на основании обнаружения того, что событие обновления модели произошло (806).
Фиг. 9 иллюстрирует схему последовательности операций типовых дополнительных подробностей создания виртуального контроллера для внутрискважинного бурового оборудования на основании номинальной модели динамики скважинного бурения и набора моделей, которые отклоняются от номинальной модели (например, 608 по Фиг. 6). В данном примере, система управления (например, система управления 132 по Фиг. 1) создает первый виртуальный контроллер, который удовлетворяет первому критерию устойчивости для номинальной модели динамики скважинного бурения, а также который удовлетворяет первому критерию устойчивости для набора моделей, которые отклоняются от номинальной модели (900). Затем система управления создает второй виртуальный контроллер, который удовлетворяет второму критерию устойчивости для номинальной модели динамики скважинного бурения, а также который удовлетворяет второму критерию устойчивости для набора моделей, которые отклоняются от номинальной модели, при этом второй критерий устойчивости отличается от первого критерия устойчивости (902).
Фиг. 10 иллюстрирует блок-схему типовой компьютерной системы 1000. Например, со ссылкой на Фиг. 1, одна или более частей системы управления 132, или КНБК 118, или другого внутрискважинного бурового оборудования могла бы быть примером системы 1000, описанной в контексте данного изобретения, так как компьютерная система используется любым пользователем, обращающимся к ресурсам системы 100 ствола скважины. Система 1000 содержит процессор 1010, оперативную память 1020, устройство хранения данных 1030 и устройство ввода-вывода 1040. Каждый из компонентов 1010, 1020, 1030, и 1040 может быть соединен с другим, например, при помощи системного интерфейса 1050. Процессор 1010 способен обрабатывать команды для выполнения в системе 1000. В некоторых вариантах реализации изобретения, процессор 1010 представляет собой однопоточный процессор. В некоторых вариантах реализации изобретения, процессор 1010 представляет собой многопоточный процессор. В некоторых вариантах реализации изобретения, процессор 1010 представляет собой квантовый компьютер. Процессор 1010 способен обрабатывать команды, хранящиеся в оперативной памяти 1020 или в устройстве хранения данных 1030. Процессор 1010 может выполнять такие операции, как определение модели динамики скважинного бурения, создание виртуального контроллера, или обновление модели динамики скважинного бурения (например, Фиг. 6-9).
Оперативная память 1020 сберегает информацию в системе 1000. В некоторых вариантах реализации изобретения, оперативная память 1020 является машиночитаемой средой передачи данных. В некоторых вариантах реализации изобретения, оперативная память 1020 является энергозависимым блоком запоминающего устройства. В некоторых вариантах реализации изобретения, оперативная память 1020 является энергонезависимым блоком запоминающего устройства.
Устройство хранения данных 1030 способно обеспечить хранение больших объемов информации для системы 1000. В некоторых вариантах реализации изобретения, устройство хранения данных 1030 является машиночитаемой средой передачи данных. В различных отличающихся вариантах реализации изобретения, устройство хранения данных 1030 может включать, например, устройство жесткого диска, устройство на оптическом диске, жесткий накопитель данных, флэш-накопитель, магнитные ленты, или любое другое устройство хранения большой емкости. В некоторых вариантах реализации изобретения, устройство хранения данных 1030 может быть устройством хранения данных в глобальной сети, например, логическое устройство хранения данных, включая множество механических устройство хранения данных, распределенных по информационной сети и доступных с использованием информационной сети. В некоторых примерах, устройство хранения данных может хранить долгосрочные данные, такие как данные о геологическом горизонте или возможности проектирования ROP. Устройство ввода-вывода 1040 обеспечивает операции ввода-вывода для системы 1000. В некоторых вариантах реализации изобретения, устройство ввода-вывода 1040 может включать одно или более из сетевых интерфейсных устройств, например, Ethernet-плату, устройство последовательной передачи, например, RS-232 порт, и/или устройство беспроводного интерфейса, например, 802.11 плату, беспроводной модем 3G, беспроводной модем 4G, или почтовый интерфейс. Сетевое интерфейсное устройство позволяет системе 1000 сообщаться, например, передавать и получать команды к и от системы управления 132 или КНБК 118 по Фиг. 1. В некоторых вариантах реализации изобретения, устройство ввода-вывода может содержать приводные устройства, сконфигурированные для получения входных данных и отправки выходных данных к другим устройствам ввода-вывода, например, клавиатуре, принтеру и устройствам отображения 1060. В некоторых вариантах реализации изобретения, могут применяться мобильные компьютерные устройства, мобильные устройства связи и другие устройства.
Сервер (например, сервер, образующий участок системы управления 132 или системы 100 ствола скважины, проиллюстрированный на Фиг. 1) может быть внедрен с помощью команд, выполнение которых побуждает одно или более обрабатывающих устройств выполнять процессы и функции, описанные выше, например, такие как определение моделей для динамики скважинного бурения, определение неопределенности для модели динамики скважинного бурения, и создание виртуальных контроллеров (например, Фиг. 6-9). Такие команды могут содержать, например, интерпретируемые команды, такие как команды сценария, или исполняемый код, или другие команды, хранящиеся в читаемой компьютером среде передачи данных. Различные компоненты системы 100 ствола скважины могут быть распределенно реализованы в сети, такие как группа серверов, или набор широко распределенных серверов, или могут быть реализованы в отдельном виртуальном устройстве, включающем множество распределенных устройств, которые работают при взаимодействии друг с другом. Например, одно из устройств может управлять другим устройством, или устройства могут работать в соответствии с набором согласованных правил или протоколов, или устройства могут координироваться другим способом. Согласованная работа множества распределенных устройств представляет видимость работы одного устройства.
Описанные особенности могут быть реализованы в цифровых электронных схемах или в аппаратных средствах вычислительной техники, встроенном программном обеспечении, программном оборудовании, или в их комбинации. Указанный инструментарий может быть реализован в виде компьютерного программного продукта, реально воплощенного в информационном носителе, например, в машиночитаемом запоминающем устройстве, для исполнения программируемым процессором; и этапы способа могут быть выполнены с помощью программируемого процессора, исполняющего программу команд для выполнения функций описанных реализаций при работе на входных данных и генерации выходных данных. Описанные особенности могут быть преимущественно реализованы в одной или более компьютерных программах, выполняемых на программируемой системе, содержащей по меньшей мере один программируемый процессор, соединенный с возможностью приема данных и команд от системы для хранения данных и с возможностью передачи данных и команд на нее, по меньшей мере одно устройство ввода и по меньшей мере одно устройство вывода. Компьютерная программа является набором команд, которые могут использовать прямо или косвенно на компьютере для выполнения определенной деятельности или обуславливать определенный результат. Компьютерная программа может быть написана на любом языке программирования, в том числе компилируемым или интерпретируемым языками, и может быть развернута в любой форме, в том числе в виде отдельной программы или в виде модуля, компонента, подпрограммы или другого блока, пригодного для использования в вычислительной среде.
Пригодные для этой цели процессоры для выполнения программы команд включают, в качестве примера, микропроцессоры как общего, так и специального назначения, а также единственный процессор или один из нескольких процессоров любого вида компьютера. Как правило, процессор будет принимать команды и данные от постоянного запоминающего устройства или оперативного запоминающего устройства, или от обоих. Элементы компьютера могут содержать процессор для выполнения команд и одно или более запоминающих устройств для хранения команд и данных. Как правило, компьютер может также содержать или быть функционально соединен для связи с одним или более запоминающими устройствами большой емкости для хранения файлов с данными; такие устройства содержат магнитные диски, такие как встроенные жесткие диски и съемные диски; магнитооптические диски; и оптические диски. Устройства хранения данных, пригодные для осуществления команд компьютерных программ и данных, содержат все виды энергонезависимой памяти, включая в качестве примера полупроводниковые запоминающие устройства (например, стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM)) и устройства флэш-памяти; магнитные диски, такие как встроенные жесткие диски и съемные диски; магнитооптические диски; и диски CD-ROM и DVD-ROM. Процессор и запоминающее устройство могут быть дополнены специализированными интегральными схемами (СИСами) или включены в них.
Для обеспечения взаимодействия с пользователем на компьютере, имеющем устройство отображения, такое как ЭЛТ (электронно-лучевая трубка) или ЖКД (жидкокристаллический дисплей) монитор для отображения информации для пользователя, а также клавиатуру и указательное устройство, такое как мышь или трекбол, с помощью которого пользователь может обеспечить ввод данных в компьютер, могут быть реализованы информационные функции.
Указанные информационные функции могут быть реализованы в компьютерной системе, содержащей внутренний компонент, такой как сервер данных, или содержащей компонент промежуточного программного обеспечения, такой как сервер приложений или Интернет-сервер, или содержащей подсистему первичной обработки данных, такую как клиентский компьютер, имеющий графический пользовательский интерфейс или Интернет-браузер, или любую их комбинацию. Компоненты системы могут быть соединены при помощи любой формы или среды цифровой передачи данных, такой как коммуникационная сеть. Примерами коммуникационных сетей могут служить, например, локальная вычислительная сеть (ЛВС), глобальная вычислительная сеть (ГВС) и компьютеры и сети, образующие Интернет.
Компьютерная система может включать в себя клиенты и серверы. Клиент и сервер, как правило, удалены друг от друга и, как правило, взаимодействуют через информационную сеть, такую как описанная выше. Отношение клиент-сервер возникает на основании компьютерных программ, запущенных на соответствующих компьютерах и имеющих отношение “клиент-сервер” друг с другом.
К тому же, для достижения желаемых результатов, в логических последовательностях операций, изображенных на фигурах, не требуется точное следование показанному конкретному порядку или последовательности. Кроме того, могут быть предусмотрены другие этапы, или этапы могут быть исключены из описанных последовательностей операций, а также другие компоненты могут быть добавлены в описанные системы или удалены из них. Соответственно, другие варианты реализации находятся в пределах объема изобретения, определяемого приводимой далее формулой.
Выше был описан ряд вариантов реализации. Тем не менее, следует понимать, что возможно внесение различных модификаций. Например, дополнительные аспекты процесса 600 могут содержать больше этапов или меньше этапов, чем показано на Фиг. 6-9. Также этапы, проиллюстрированные на Фиг. 6-9, могут быть выполнены в отличных от показанных на фигурах последовательностях. Более того, несмотря на то, что концепты были описаны в контексте системы бурения ствола скважины, концепции также могут применяться к другим процессам. Например, связанным с медицинским эндоскопическим исследованием или в других применениях, где инструмент вставляется и управляется внутри неизвестных условий размещения. Соответственно, другие варианты реализации находятся в пределах объема изобретения, определяемого приводимой далее формулой.
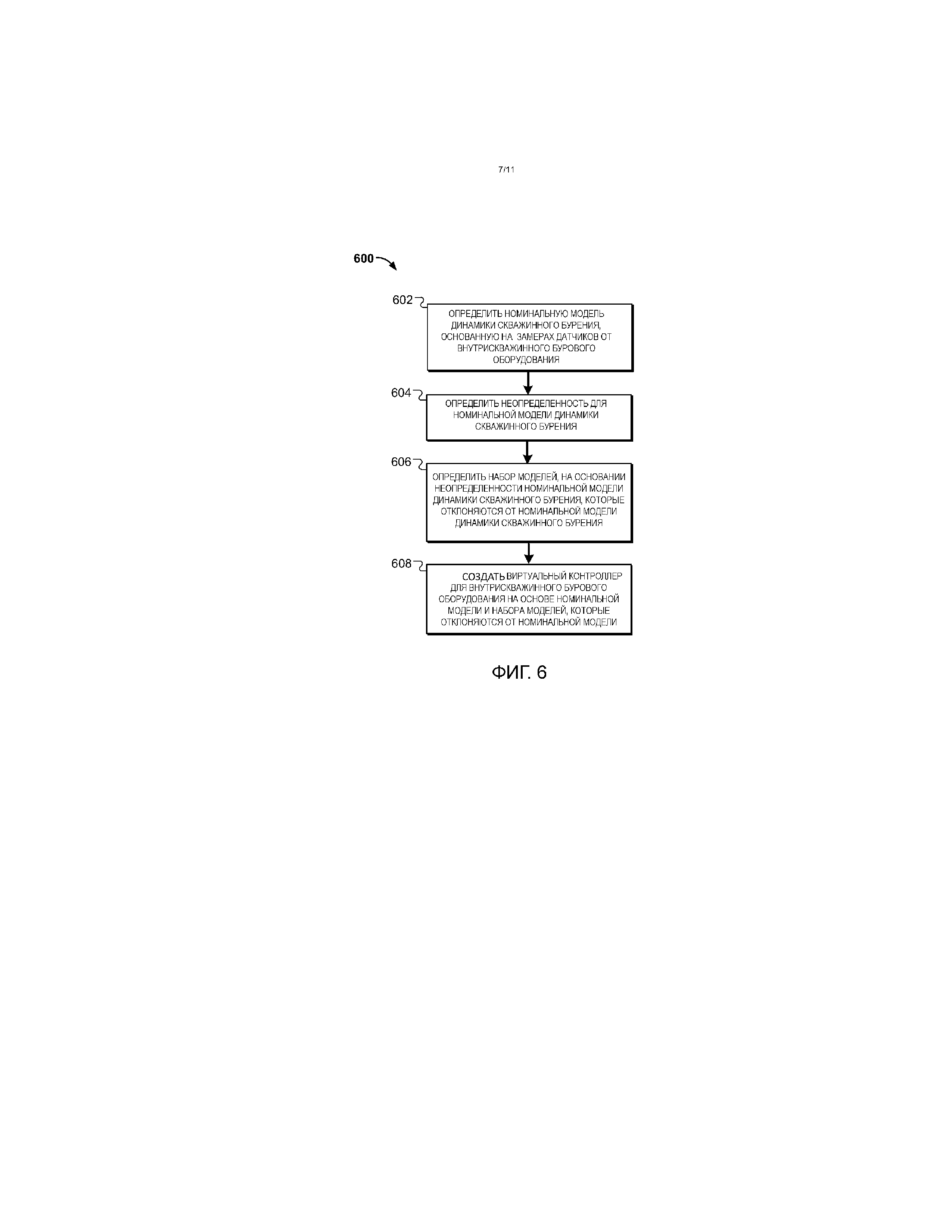
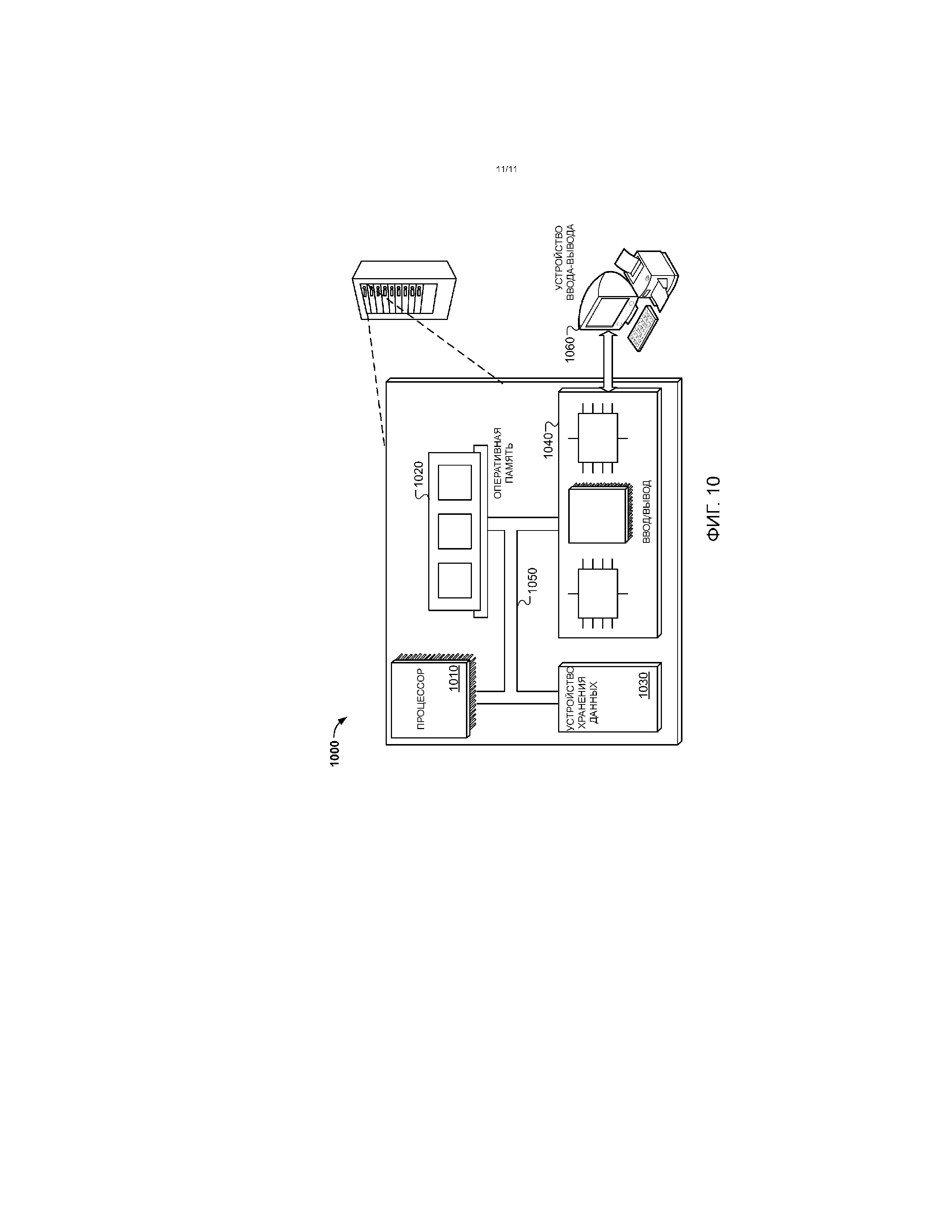
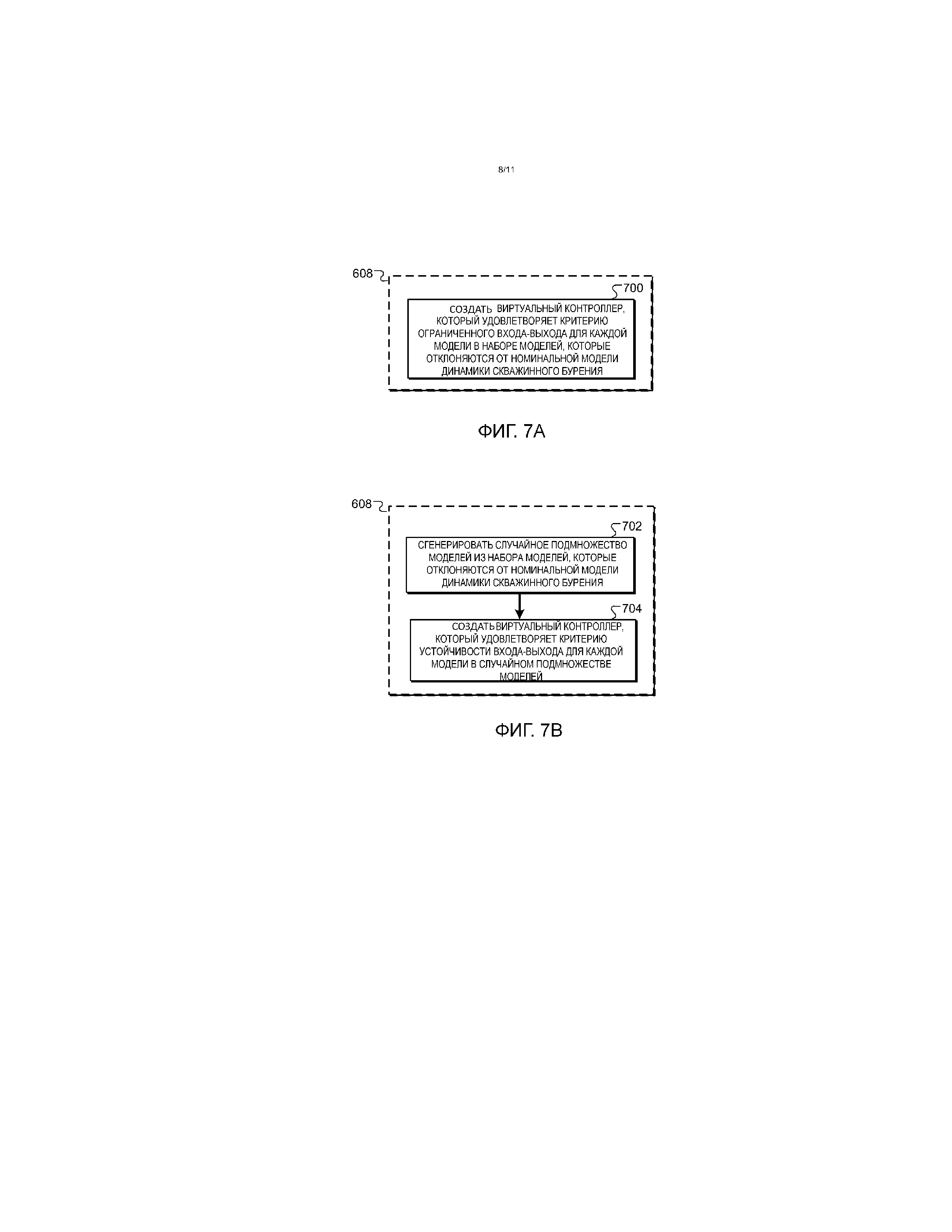
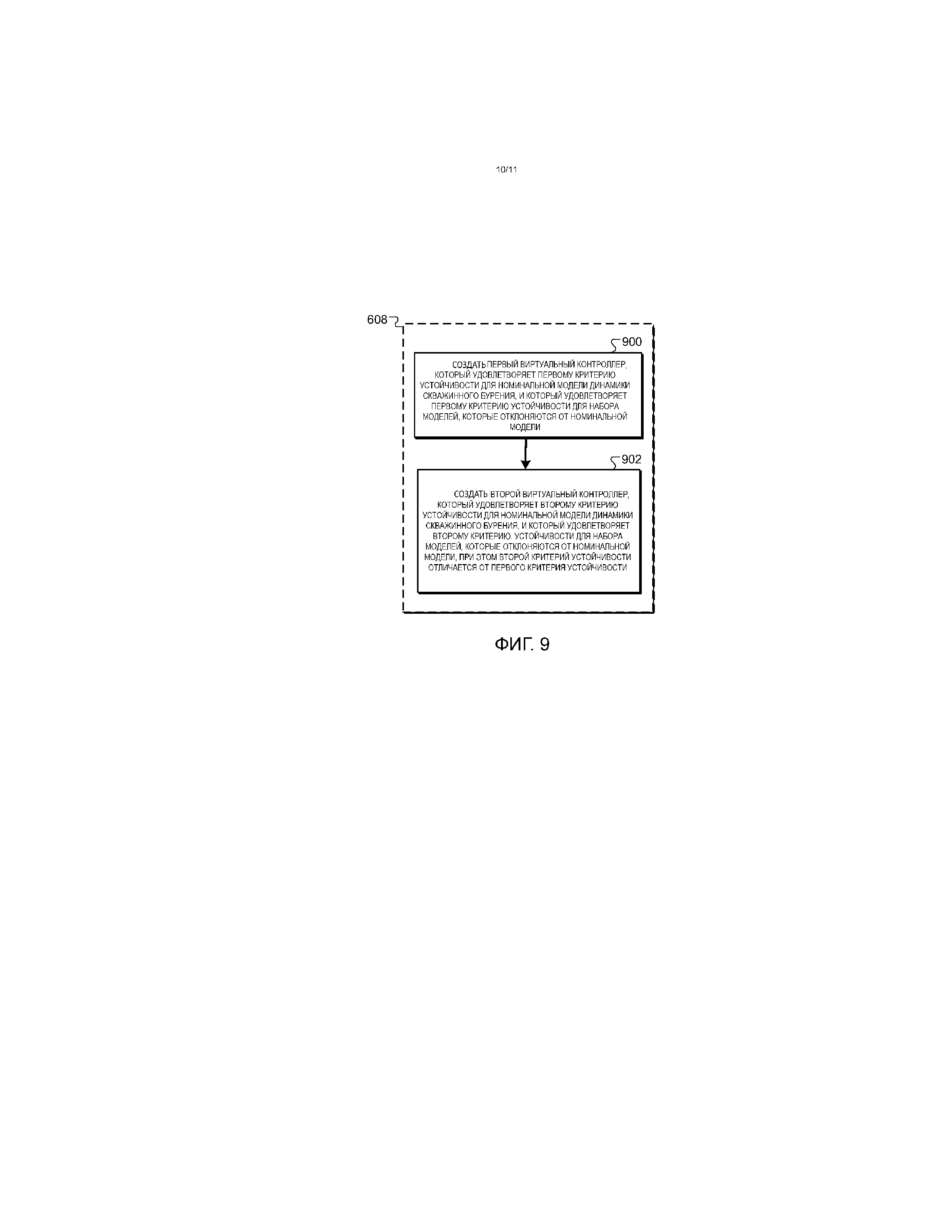
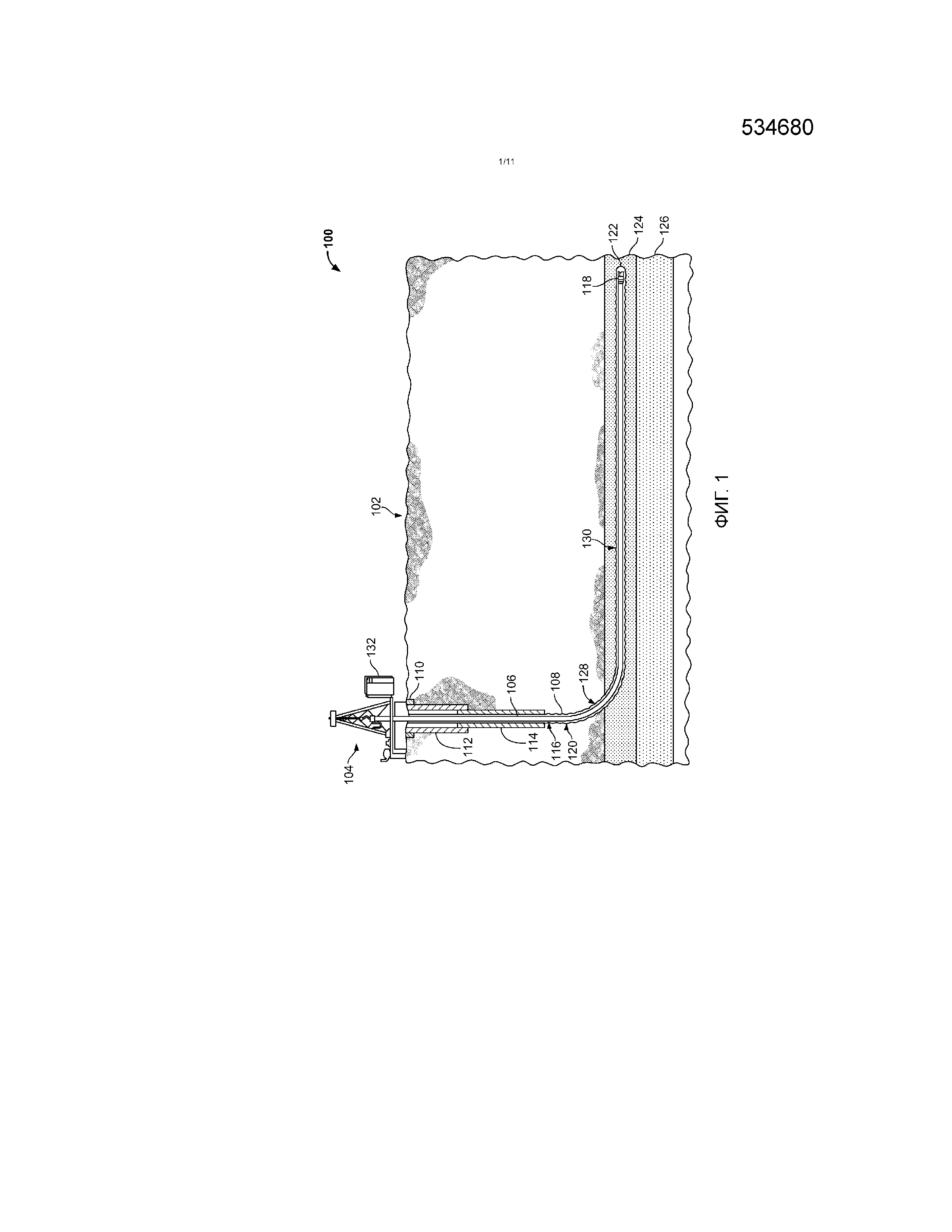
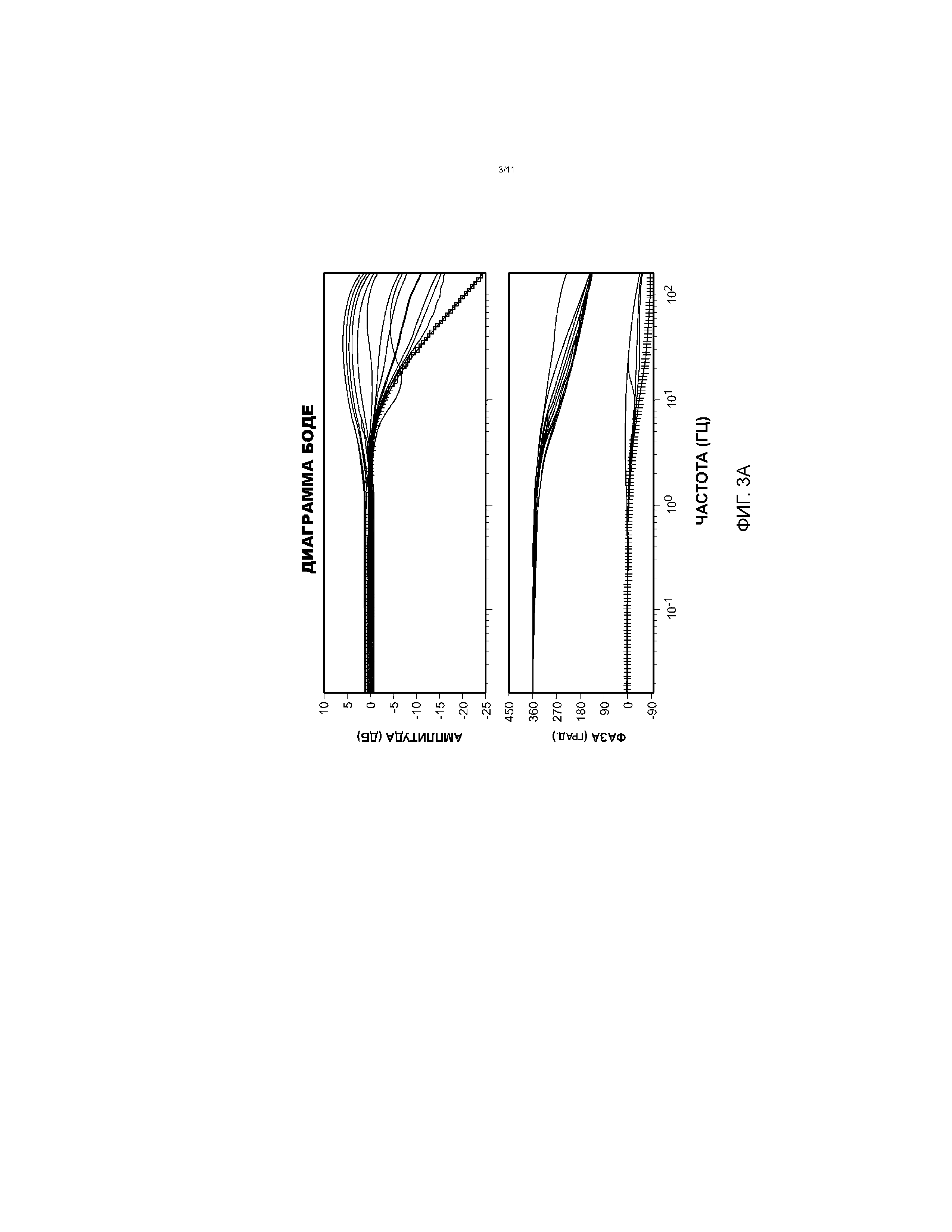
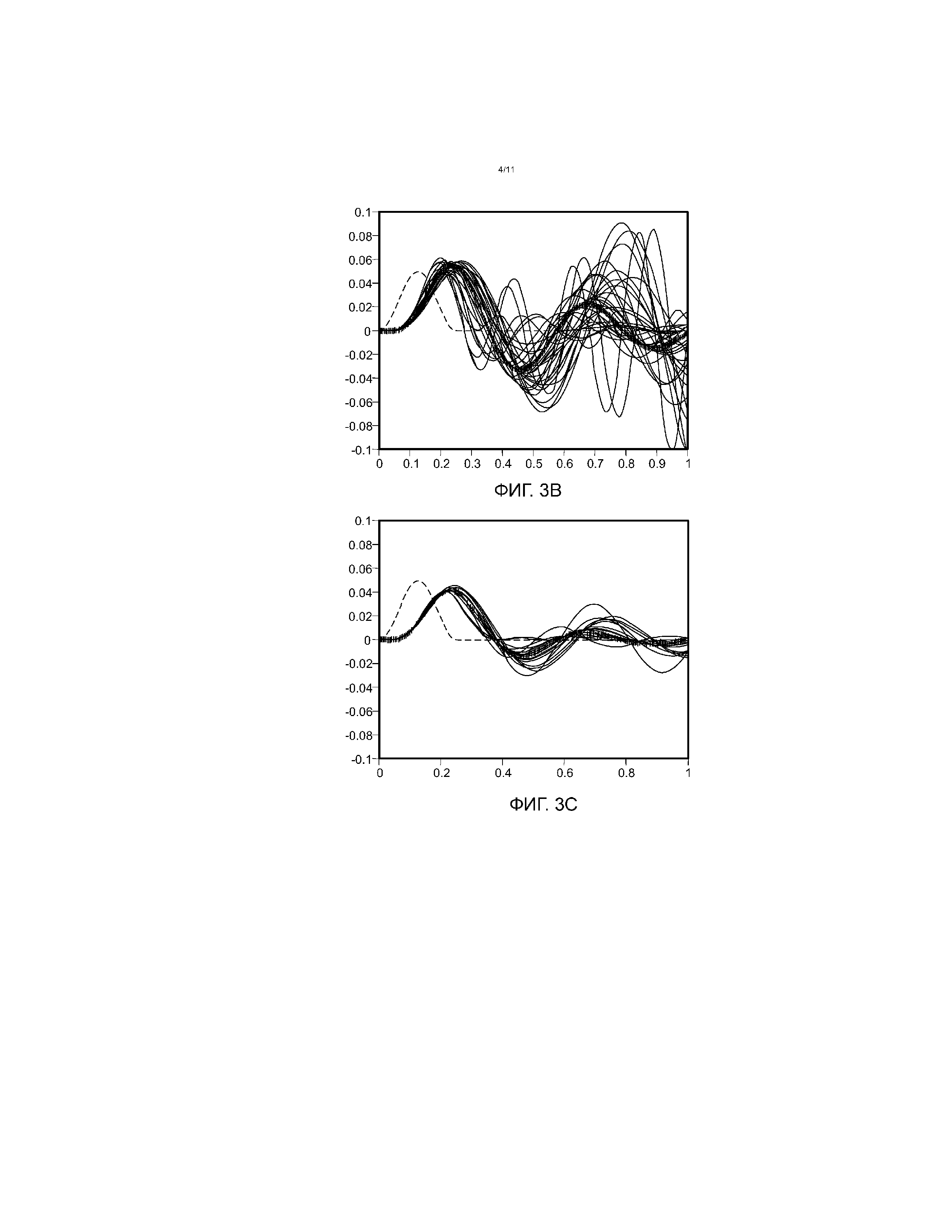
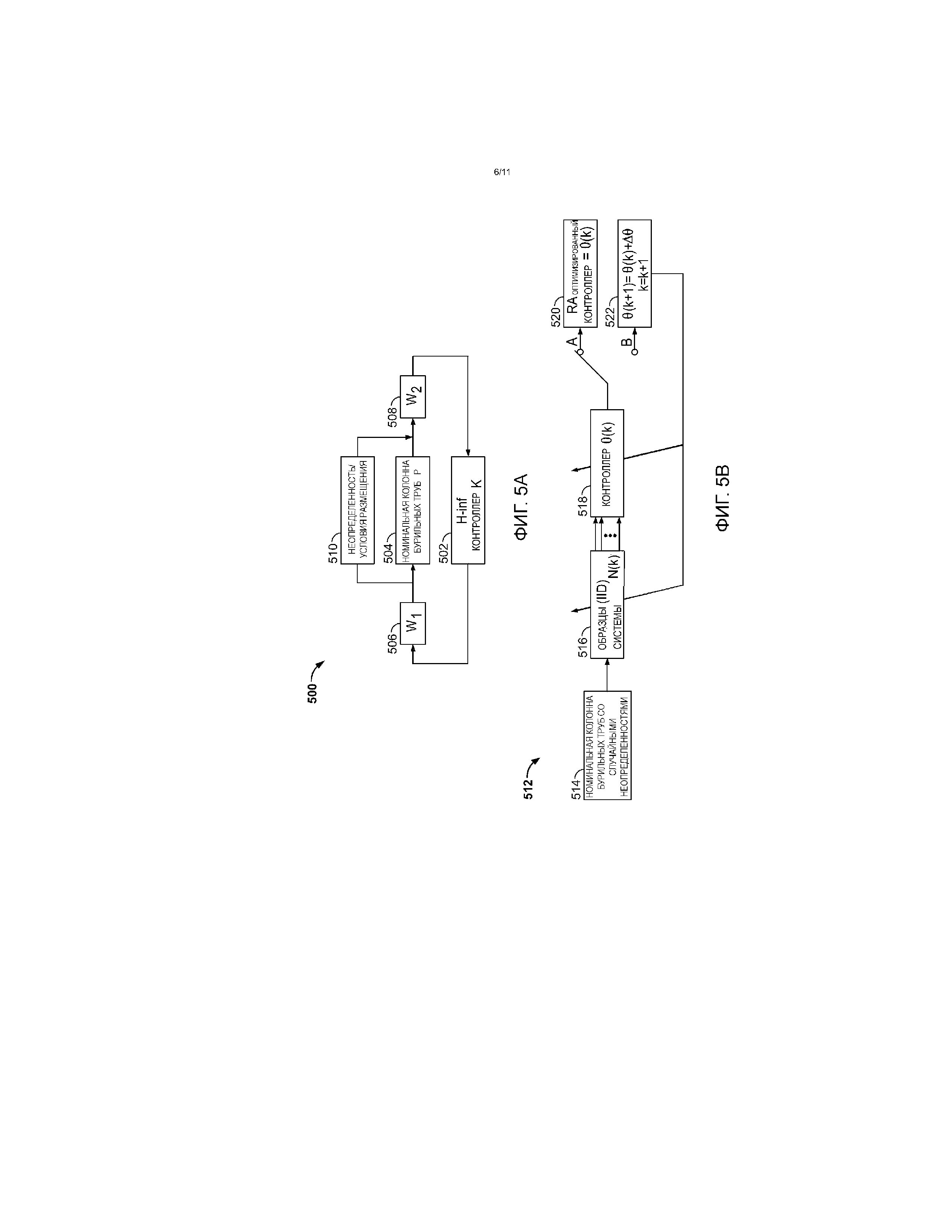
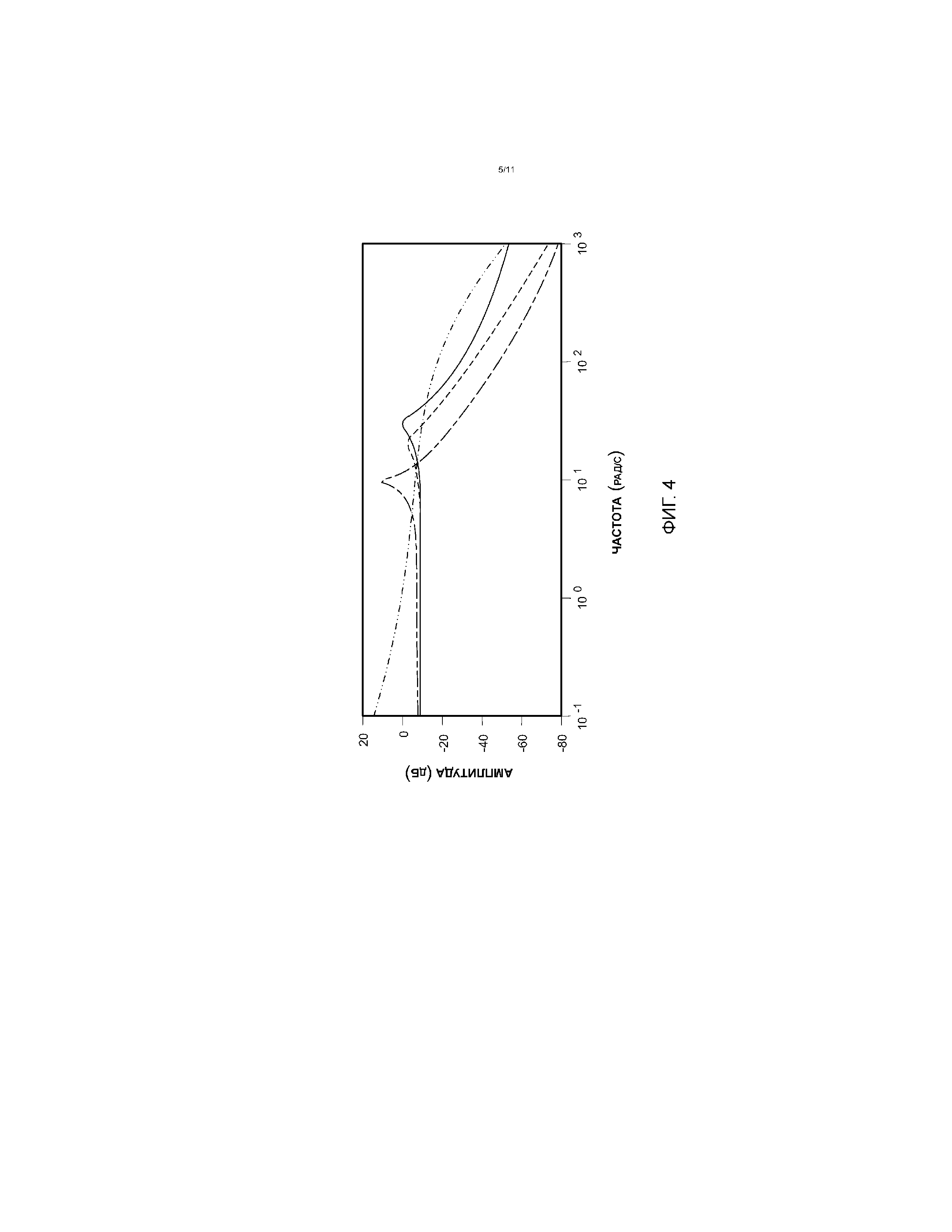
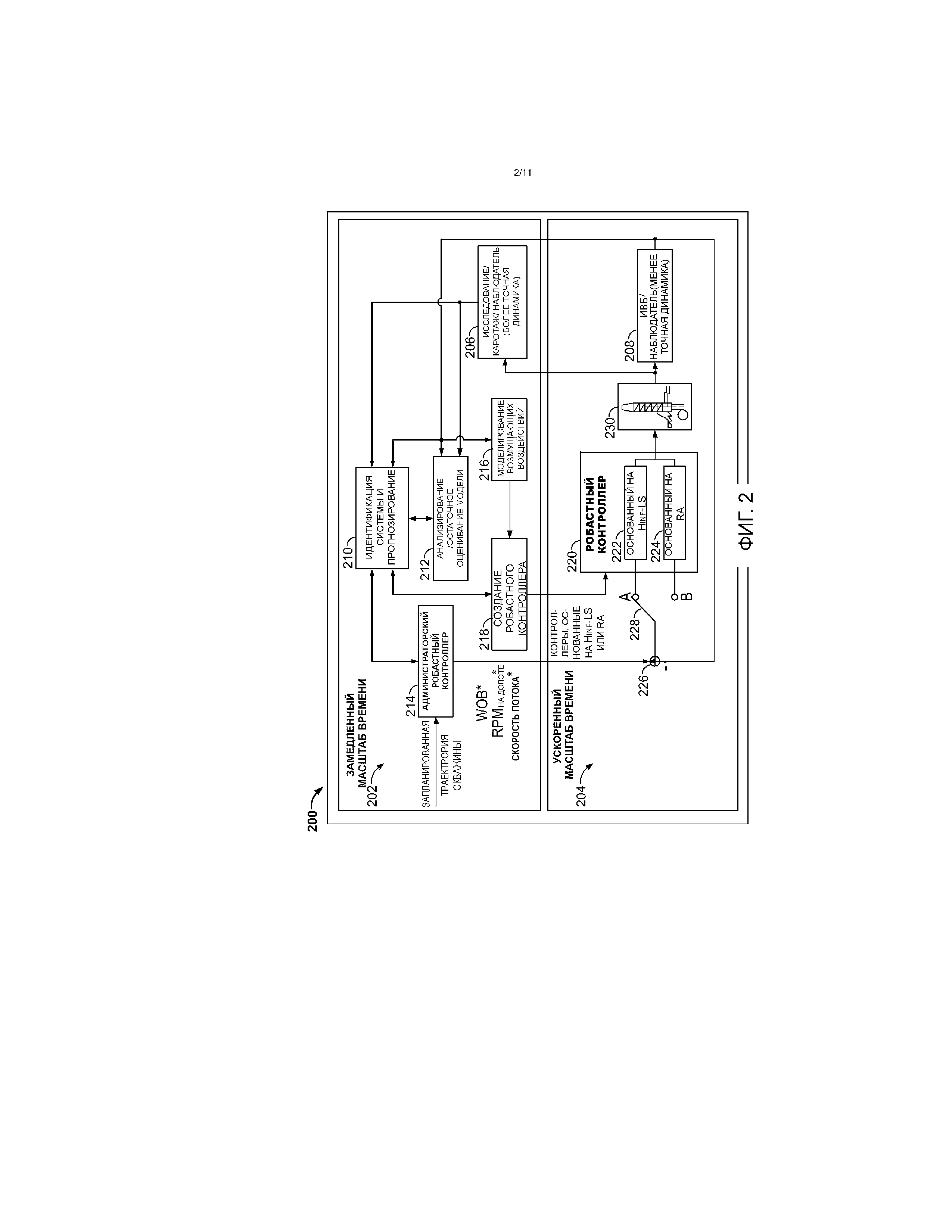
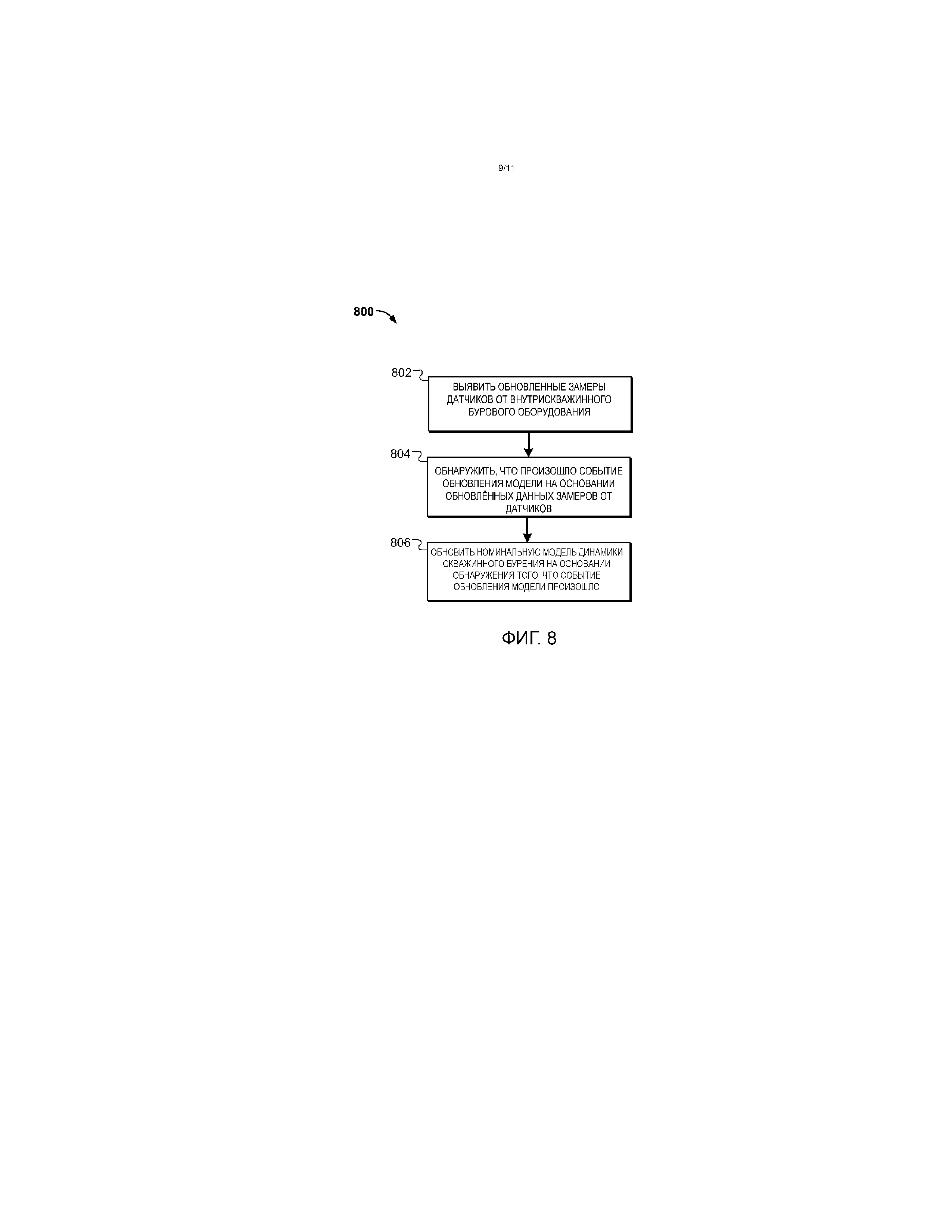
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Регулируемая система ограничения потока для использования в подземной скважине
Устройство регулирования потока для установки в скважине (варианты) и способ регулирования потока
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Устройство регулирования потока для установки в скважине (варианты) и способ регулирования потока
Регулируемый ограничитель потока для использования в подземной скважине

