Результат интеллектуальной деятельности: Способ комплексной калибровки пеленгатора - корреляционного интерферометра на мобильном носителе
Вид РИД
Изобретение
Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано для калибровки мобильного пеленгатора, реализующего алгоритм корреляционного интерферометра.
Необходимая точность мобильных пеленгаторов контролируется и обеспечивается специальной калибровкой [1, с. 217-220 - Вартанесян В.А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. - М: Воениздат МО СССР, 1966. - 248 с.].
Известен способ калибровки пеленгатора [2, с. 570 - Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Советское радио, 1964. - 640 с.], включающий прием контрольных сигналов тестовых источников радиоизлучения (ИРИ) с известными координатами. Он позволяет проконтролировать работоспособность пеленгатора, но обеспечивает низкую точность калибровки [3, с. 280 - Левин Б.Р. Теоретические основы статистической радиотехники. Книга вторая. - М.: Советское радио, 1972] в связи с отсутствием необходимого числа тестовых ИРИ при пеленговании с различных направлений (по азимуту и углу места), не позволяющим принять меры по снижению ошибок пеленгования, что является его недостатком.
Известен способ калибровки пеленгатора, осуществляемый путем облета летательного средства (самолета) с тестовым ИРИ на борту по маршруту, вокруг центра которого размещен мобильный пеленгатор, с пересечением предварительно выбранных ориентиров [1, с. 218]. При этом, согласно этому способу, точность заходов летательного средства над ориентирами маршрута должна быть не хуже 1°. Известный способ позволяет производить калибровку мобильного пеленгатора и оценивать ошибку пеленгования. Кроме того, его можно использовать для калибровки не только в азимутальных направлениях, но и по углу места. Недостатком является то, что точность калибровки ограничена и требует больших временных затрат на ее проведение. Это объясняется сложностью выполнения калибровочных работ, связанных с ограниченностью по времени пребывания летательного средства над ориентиром при измерении векторов амплитудно-фазового распределения (АФР), необходимых для калибровки пеленгатора - корреляционного интерферометра, при пролете летательного средства над каждым ориентиром. Кроме того, для уменьшения случайных ошибок летательному средству необходимо совершить несколько заходов над ориентиром.
Известен способ калибровки мобильного пеленгатора - корреляционного интерферометра с применением навигационной аппаратуры потребителя глобальной навигационной спутниковой системы (НАП ГНСС) [4, Способ калибровки мобильного пеленгатора - корреляционного интерферометра с применением навигационной аппаратуры потребителя глобальной навигационной спутниковой системы. Патент RU №2573819, МПК G01S 7/40, опубл. 27.01.2016, бюл. №3], принятый за прототип, который включает:
- определение необходимого числа позиций тестового источника радиоизлучений (ИРИ) (К) для контрольных измерений в заданном секторе азимутальных углов и сборку измерительного стенда, включающего подвижные аппаратно-программные средства с тестовым ИРИ и стационарную часть, подключенную к пеленгатору;
- последовательную установку носителя в v-q ( ,V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот;
,V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот;
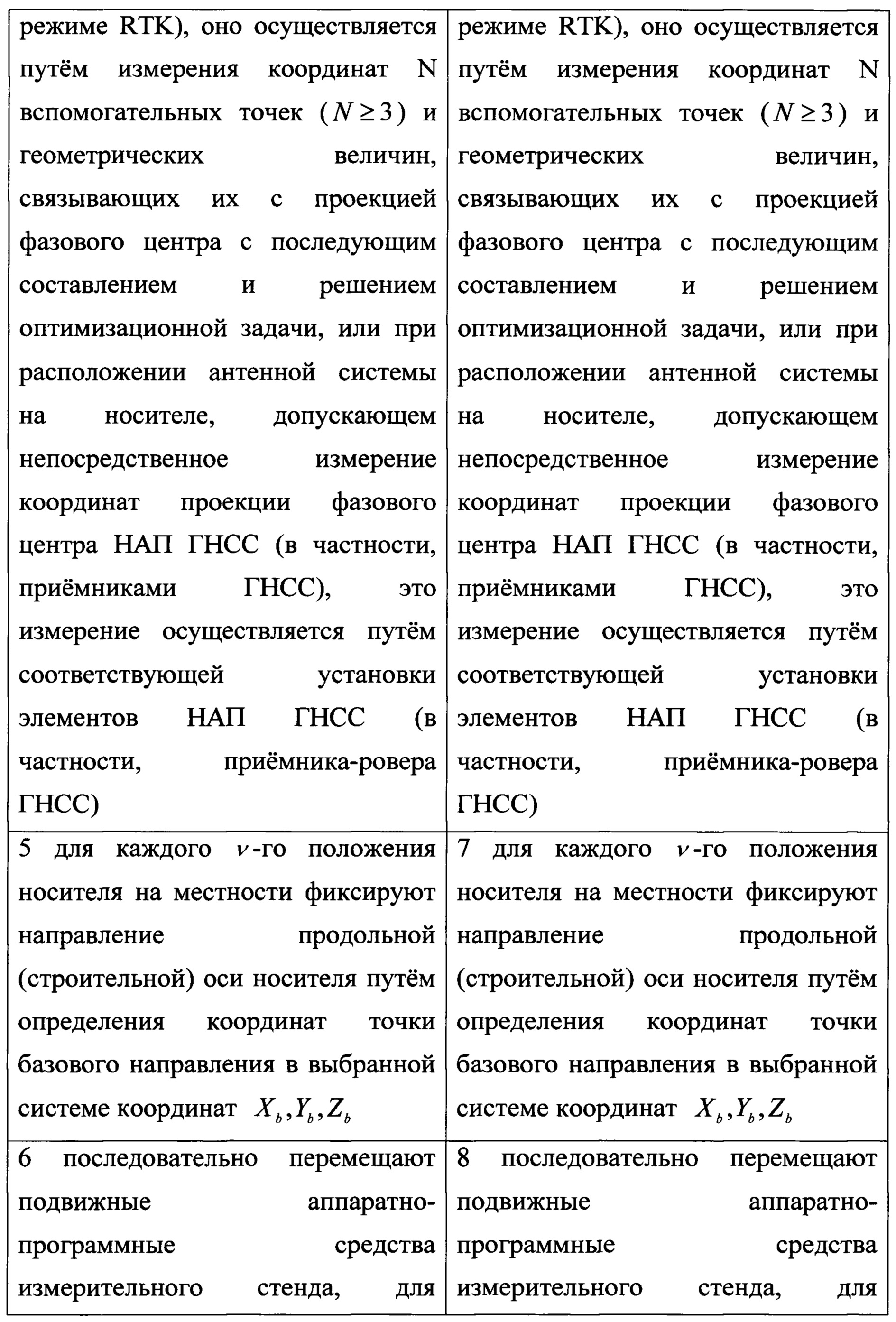
- осуществление для каждого v-го положения носителя на местности определения координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0,Y0,Z0: при расположении антенной системы на носителе, не допускающем непосредственное измерение координат проекции НАП ГНСС (в частности, приемниками ГНСС в режиме RTK), оно осуществляется путем измерения координат N вспомогательных точек (N≥3) и геометрических величин, связывающих их с проекцией фазового центра с последующим составлением и решением оптимизационной задачи, или при расположении антенной системы на носителе, допускающем непосредственное измерение координат проекции фазового центра НАП ГНСС (в частности, приемниками ГНСС), это измерение осуществляется путем соответствующей установки элементов НАП ГНСС (в частности, приемника-ровера ГНСС);
- фиксацию для каждого v-го положения носителя на местности направления продольной (строительной) оси носителя путем определения координат точки базового направления в выбранной системе координат Xb, Yb, Zb;
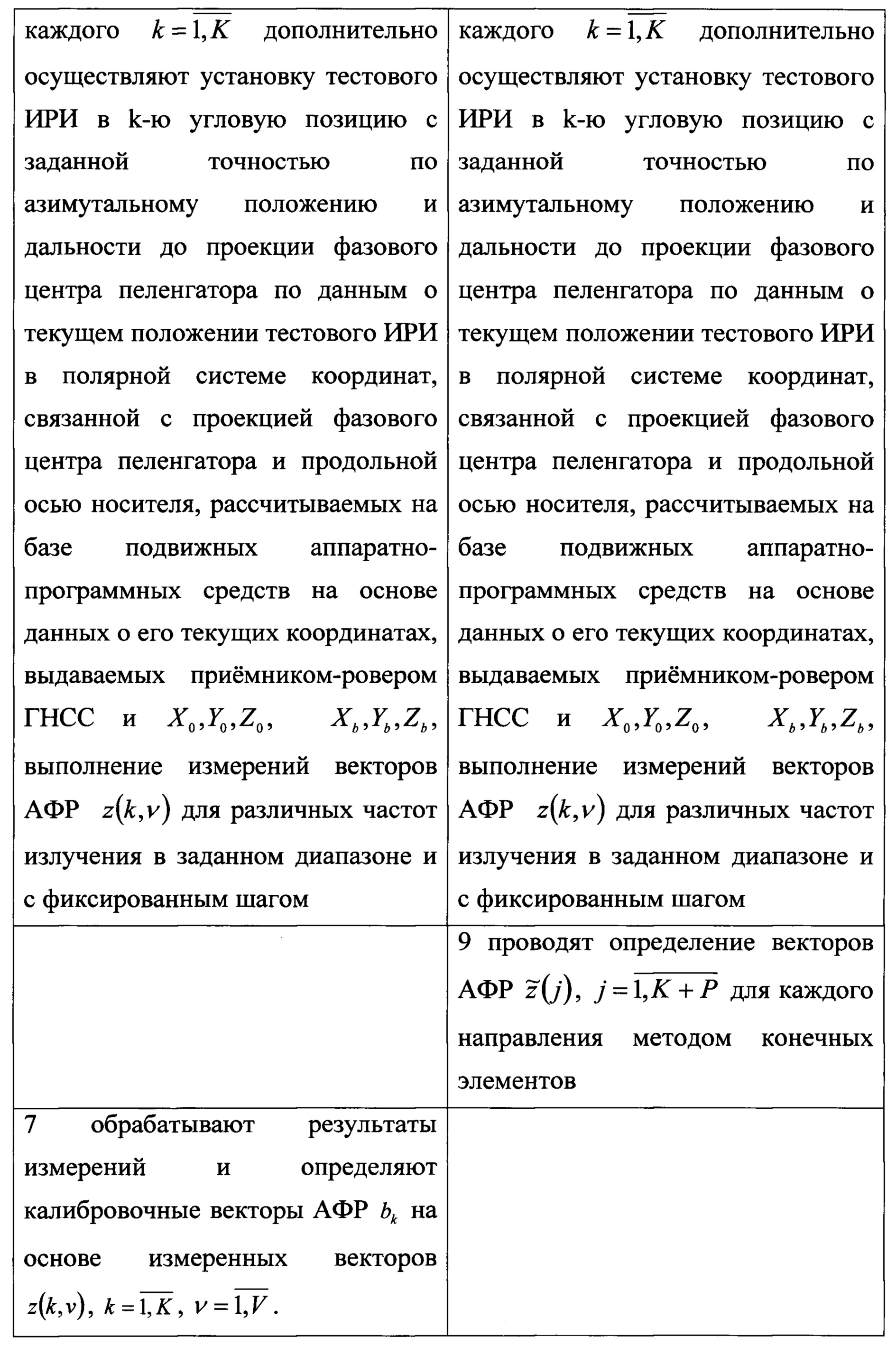
- последовательное перемещение подвижных аппаратно-программных средств измерительного стенда, осуществление для каждого  установки тестового ИРИ в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового ИРИ в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером ГНСС и X0,Y0,Z0, Xb,Yb,Zb, выполнение измерений векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом;
установки тестового ИРИ в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового ИРИ в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером ГНСС и X0,Y0,Z0, Xb,Yb,Zb, выполнение измерений векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом;
- обработку результатов измерений и определение калибровочных векторов АФР bk на основе измеренных векторов z(k,v), ,  .
.
Способ-прототип позволяет выполнить калибровку мобильного пеленгатора, реализующего алгоритм корреляционного интерферометра, с заданной точностью расположения ИРИ.
Однако в способе-прототипе калибровка осуществляется только в заданных секторах азимутальных углов и имеет ограничения по углу места. В свою очередь отсутствие учета угла места при выполнении калибровки приводит к ее низкой точности для соответствующих направлений из-за необеспечения условий для проведения измерений.
Кроме того, конструкции мобильного носителя во время проведения калибровки (при нахождении на земле) и при применении пеленгатора могут отличаться, например, для мобильного носителя в виде летно-подъемного средства при наземном положении иметь выдвижные удерживающие конструктивные элементы. Эти отличия не позволяют качественно выполнить калибровку в тех локальных угловых секторах относительно фазового центра антенной системы пеленгатора, в которых находятся такие конструктивные элементы, т.е. калибровка в этих секторах будет иметь низкую точность из-за необеспечения условий для проведения измерений.
Таким образом, недостатками способа-прототипа являются низкая точность калибровки в секторе углов (азимутальных и угломестных), где условия для проведения измерений не обеспечены.
Предлагаемый способ свободен от указанных недостатков и при этом сохраняет достоинство способа-прототипа - высокую точность калибровки в азимутальных секторах, в которых обеспечиваются условия для проведения измерений.
Задачей, на решение которой направлено изобретение, является повышение точности калибровки мобильного пеленгатора - корреляционного интерферометра.
Для решения указанной задачи предлагается способ комплексной калибровки пеленгатора - корреляционного интерферометра на мобильном носителе, при котором собирают измерительный стенд, включающий подвижные аппаратно-программные средства с тестовым ИРИ и стационарную часть, подключенную к пеленгатору, последовательно устанавливают носитель в v-e ( , V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот, для каждого v-го положения носителя на местности осуществляют определение координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0,Y0,Z0: при расположении антенной системы на носителе, не допускающем непосредственное измерение координат проекции НАП ГНСС (в частности, приемниками ГНСС в режиме RTK), оно осуществляется путем измерения координат N вспомогательных точек (N≥3) и геометрических величин, связывающих их с проекцией фазового центра с последующим составлением и решением оптимизационной задачи, или при расположении антенной системы на носителе, допускающем непосредственное измерение координат проекции фазового центра НАП ГНСС (в частности, приемниками ГНСС), это измерение осуществляется путем соответствующей установки элементов НАП ГНСС (в частности, приемника-ровера ГНСС), для каждого v-го положения носителя на местности фиксируют направление продольной (строительной) оси носителя путем определения координат точки базового направления в выбранной системе координат Xb,Yb,Zb, последовательно перемещают подвижные аппаратно-программные средства измерительного стенда, для каждого
, V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот, для каждого v-го положения носителя на местности осуществляют определение координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0,Y0,Z0: при расположении антенной системы на носителе, не допускающем непосредственное измерение координат проекции НАП ГНСС (в частности, приемниками ГНСС в режиме RTK), оно осуществляется путем измерения координат N вспомогательных точек (N≥3) и геометрических величин, связывающих их с проекцией фазового центра с последующим составлением и решением оптимизационной задачи, или при расположении антенной системы на носителе, допускающем непосредственное измерение координат проекции фазового центра НАП ГНСС (в частности, приемниками ГНСС), это измерение осуществляется путем соответствующей установки элементов НАП ГНСС (в частности, приемника-ровера ГНСС), для каждого v-го положения носителя на местности фиксируют направление продольной (строительной) оси носителя путем определения координат точки базового направления в выбранной системе координат Xb,Yb,Zb, последовательно перемещают подвижные аппаратно-программные средства измерительного стенда, для каждого  дополнительно осуществляют установку тестового ИРИ в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового ИРИ в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером ГНСС и X0,YQ,Z0, Xb,Yb,Zb, выполнение измерений векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом отличающийся тем, что определяют множество пространственных угловых секторов
дополнительно осуществляют установку тестового ИРИ в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового ИРИ в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером ГНСС и X0,YQ,Z0, Xb,Yb,Zb, выполнение измерений векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом отличающийся тем, что определяют множество пространственных угловых секторов  , где условия для проведения измерений не обеспечены, формируют множество азимутальных угловых секторов, где условия измерений обеспечены
, где условия для проведения измерений не обеспечены, формируют множество азимутальных угловых секторов, где условия измерений обеспечены  ,
,  - множество пространственных угловых секторов, в которых необходимо провести калибровку, задают необходимое число позиций К тестового источника радиоизлучений (ИРИ) для множества
- множество пространственных угловых секторов, в которых необходимо провести калибровку, задают необходимое число позиций К тестового источника радиоизлучений (ИРИ) для множества  и необходимое число позиций Р для множества
и необходимое число позиций Р для множества  , выполняют измерения геометрических размеров носителя и пеленгатора и создают трехмерную модель носителя с установленным на нем пеленгатором, проводят определение векторов АФР
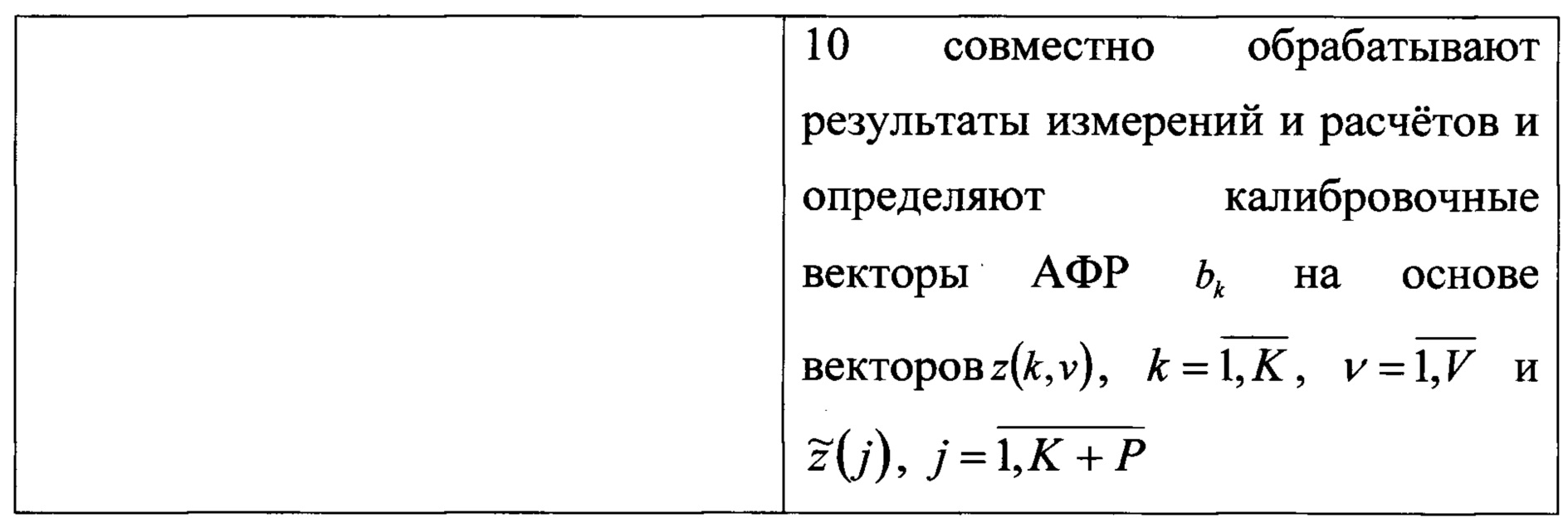
, выполняют измерения геометрических размеров носителя и пеленгатора и создают трехмерную модель носителя с установленным на нем пеленгатором, проводят определение векторов АФР  для каждого направления методом конечных элементов, совместно обрабатывают результаты измерений и расчетов и определяют калибровочные векторы АФР bk на основе векторов z(k,v),
для каждого направления методом конечных элементов, совместно обрабатывают результаты измерений и расчетов и определяют калибровочные векторы АФР bk на основе векторов z(k,v),  ,
,  и
и  ,
,  .
.
Технический результатом является повышение точности калибровки мобильного пеленгатора - корреляционного интерферометра в азимутальных и угломестных секторах углов, где условия для проведения измерений не обеспечены, при сохранении высокой точности калибровки в азимутальных секторах, в которых условия для проведения измерений обеспечиваются.
Указанный технический результат достигают за счет введения новой совокупности операций по определению множества секторов углов, где условия для проведения измерений не обеспечены, формированию множества секторов, где условия измерений обеспечены, выполнению измерений геометрических размеров носителя и пеленгатора и созданию трехмерной модели носителя с установленным на нем пеленгатором, определению векторов АФР для каждого направления методом конечных элементов, обработке результатов измерений и расчетов, и определения калибровочных векторов.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
В практическом плане способ осуществляют следующим образом:
1. Определяют множество пространственных угловых секторов  , где условия для проведения измерений не обеспечены, формируют множество азимутальных угловых секторов, где условия измерений обеспечены
, где условия для проведения измерений не обеспечены, формируют множество азимутальных угловых секторов, где условия измерений обеспечены  ,
,  - множество пространственных угловых секторов, в которых необходимо провести калибровку.
- множество пространственных угловых секторов, в которых необходимо провести калибровку.
2. Задают необходимое число позиций K тестового источника радиоизлучений (ИРИ) для множества  и необходимое число позиций Р для множества
и необходимое число позиций Р для множества  .
.
3. Собирают измерительный стенд, включающий подвижные аппаратно-программные средства с тестовым ИРИ и стационарную часть, подключенную к пеленгатору.
4. Выполняют измерения геометрических размеров носителя и пеленгатора и создают трехмерную модель носителя с установленным на нем пеленгатором.
5. Последовательно устанавливают носитель в v-e ( , V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот.
, V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот.
6. Для каждого v-го положения носителя на местности осуществляют определение координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0, Y0, Z0: при расположении антенной системы на носителе, не допускающем непосредственное измерение координат проекции НАП ГНСС (в частности, приемниками ГНСС в режиме RTK), оно осуществляется путем измерения координат N вспомогательных точек (N≥3) и геометрических величин, связывающих их с проекцией фазового центра с последующим составлением и решением оптимизационной задачи, или при расположении антенной системы на носителе, допускающем непосредственное измерение координат проекции фазового центра НАП ГНСС (в частности, приемниками ГНСС), это измерение осуществляется путем соответствующей установки элементов НАП ГНСС (в частности, приемника-ровера ГНСС).
7. Для каждого v-го положения носителя на местности фиксируют направление продольной (строительной) оси носителя путем определения координат точки базового направления в выбранной системе координат Xb, Yb, Zb.
8. Последовательно перемещают подвижные аппаратно-программные средства измерительного стенда, для каждого  дополнительно осуществляют установку тестового ИРИ в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового ИРИ в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером ГНСС и X0,Y0,Z0, Xb,Yb,Zb, выполнение измерений векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом.
дополнительно осуществляют установку тестового ИРИ в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового ИРИ в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером ГНСС и X0,Y0,Z0, Xb,Yb,Zb, выполнение измерений векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом.
9. Проводят определение векторов АФР  ,
,  для каждого направления методом конечных элементов.
для каждого направления методом конечных элементов.
10. Совместно обрабатывают результаты измерений и расчетов и определяют калибровочные векторы АФР bk на основе векторов z(k,v),  ,
,  и
и  ,
,  .
.
Для выполнения пунктов 1, 2 определяют множество пространственно-угловых секторов  , где условия для проведения измерений не обеспечены, например направления, где происходит затенение антенной решетки пеленгатора или невозможно физическое размещение тестового ИРИ, формируют множество азимутальных угловых секторов, где условия измерений обеспечены, как
, где условия для проведения измерений не обеспечены, например направления, где происходит затенение антенной решетки пеленгатора или невозможно физическое размещение тестового ИРИ, формируют множество азимутальных угловых секторов, где условия измерений обеспечены, как  ,
,  - множество пространственных угловых секторов, в котором необходимо провести калибровку.
- множество пространственных угловых секторов, в котором необходимо провести калибровку.
Определяют необходимое число позиций К тестового ИРИ для контрольных измерений для множества  , например задают шаг изменения азимутального положения тестового ИРИ Δθ, шаг изменения угломестного положения тестового ИРИ Δϕ, начальное (нулевое) азимутальное положение θ0=0, начальное (нулевое) угломестное положение ϕ0=0. Аналогично определяют необходимое число позиций Р тестового ИРИ для контрольных измерений для множества
, например задают шаг изменения азимутального положения тестового ИРИ Δθ, шаг изменения угломестного положения тестового ИРИ Δϕ, начальное (нулевое) азимутальное положение θ0=0, начальное (нулевое) угломестное положение ϕ0=0. Аналогично определяют необходимое число позиций Р тестового ИРИ для контрольных измерений для множества  .
.
Для выполнения пункта 3 собирают измерительный стенд по схеме, например, соответствующий фиг.
Для выполнения пункта 4 измеряют геометрические размеры носителя и пеленгатора, в том числе определяют материалы, из которых они выполнены. Строят трехмерную модель носителя с установленным на нем пеленгатором.
Для выполнения пунктов 5, 6 последовательно устанавливают носитель с пеленгатором в v-e ( , V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот.
, V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового ИРИ в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот.
После каждой установки носителя в v-e положение на местности осуществляют определение координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0,Y0,Z0:
- при расположении антенной системы на носителе, не допускающем непосредственного измерения координат проекции НАП ГНСС (в частности, приемником-ровером ГНСС), оно осуществляется путем измерения координат N вспомогательных точек (Xn,Yn,Zn),  , N≥3 (приемником-ровером ГНСС совместно с приемником-базой ГНСС в режиме RTK) и геометрических величин (углов и дальностей, например, тахеометром), связывающих их с проекцией фазового центра с последующим составлением уравнений связи переменных и решением оптимизационной задачи определения координат проекции фазового центра X0,Y0,Z0 [5, с. 1410-1412 - Строцев А.А., Колесников С.С., Сухенький И.А. Методика калибровки мобильного пеленгатора - многоканального корреляционного интерферометра с применением GNSS приемников // Сборник докладов XX Международной научно-технической конференции «Радиолокация, навигация, связь». - Воронеж: НПФ «Саквое», 2014 г., т. 2. - С. 1407-1418];
, N≥3 (приемником-ровером ГНСС совместно с приемником-базой ГНСС в режиме RTK) и геометрических величин (углов и дальностей, например, тахеометром), связывающих их с проекцией фазового центра с последующим составлением уравнений связи переменных и решением оптимизационной задачи определения координат проекции фазового центра X0,Y0,Z0 [5, с. 1410-1412 - Строцев А.А., Колесников С.С., Сухенький И.А. Методика калибровки мобильного пеленгатора - многоканального корреляционного интерферометра с применением GNSS приемников // Сборник докладов XX Международной научно-технической конференции «Радиолокация, навигация, связь». - Воронеж: НПФ «Саквое», 2014 г., т. 2. - С. 1407-1418];
- при расположении антенной системы на носителе, допускающем непосредственное измерение координат проекции фазового центра НАП ГНСС, это измерение осуществляют путем соответствующей установки элементов НАП ГНСС.
Для выполнения пункта 7 фиксируют на местности направление продольной (строительной) оси носителя путем определения с помощью НАП ГНСС (в частности, путем установки вешки с приемником-ровером ГНСС на линии визирования, совпадающей с продольной (строительной) осью носителя, с последующим проведением измерений совместно с приемником-базой ГНСС в режиме RTK) координат точки базового направления в выбранной системе координат Xb,Yb,Zb.
Для выполнения пункта 8 осуществляют перемещение и установку тестового ИРИ в k-ю, , угловую позицию на расстояние (d±δd) метров от фазового центра пеленгатора с заданной допустимой абсолютной погрешностью δθ. В частности, для автоматизации процедуры установки тестового ИРИ в условиях практической горизонтальности участка местности проведения калибровочных работ выполняют следующие операции:
- определяют истинный курс носителя:
где  - пространственные топоцентрические горизонтальные прямоугольные координаты точки базового направления относительно проекции фазового центра антенной системы,
- пространственные топоцентрические горизонтальные прямоугольные координаты точки базового направления относительно проекции фазового центра антенной системы,

В0, L0 - эллипсоидальные геодезические координаты (широта и долгота) проекции фазового центра антенной системы, вычисленные по значениям координат X0,Y0,Z0 в соответствии с [6 - ГОСТ Р 51794-2008. Глобальные навигационные спутниковые системы. Системы координат. Методы преобразований координат определяемых точек. - М.: Стандартинформ, 2009] в выбранной системе координат,
- по текущим координатам X,Y,Z положения тестового ИРИ, измеренных приемником-ровером ГНСС совместно с приемником-базой ГНСС в режиме RTK в выбранной системе координат, определяют координаты положения ИРИ в пространственной топоцентрической горизонтальной прямоугольной системе координат [7, с. 19 - Машимов М.М. Геодезия. Теоретическая геодезия: Справочное пособие / Под ред. В.П. Савиных и В.Р. Ященко. - М.: Недра, 1991. - 268 с.] с центром в точке проекции фазового центра антенной системы:
 ;
;
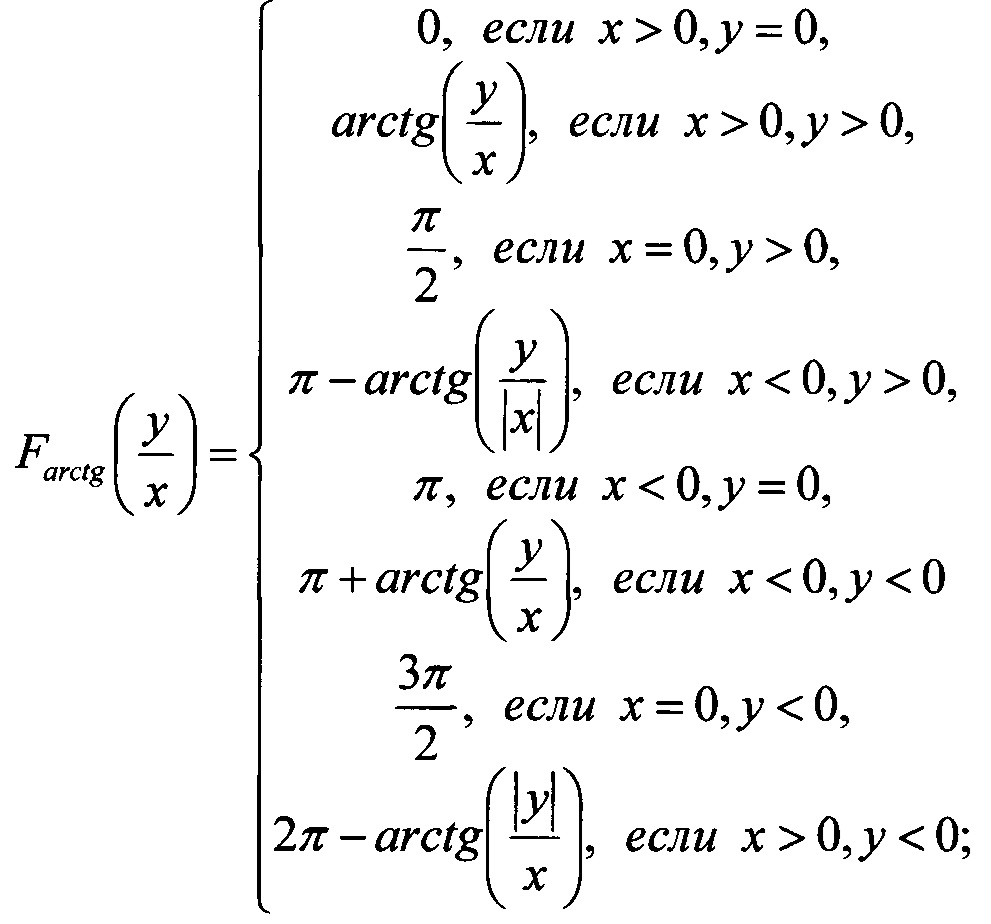
- определяют курсовой азимут положения тестового ИРИ в текущей точке с координатами X,Y,Z относительно проекции фазового центра антенной системы
- определяют расстояния между положением ИРИ в текущей точке с координатами X,Y,Z и проекцией фазового центра антенной системы
 ;
;
- перемещая подвижные аппаратно-программные средства с приемником-ровером ГНСС (ПАПС с ГНСС-ПР) 3 контролируют положение тестового ИРИ при его установке в k-ю угловую позицию с заданной точностью по азимутальному положению (kΔθ) и по требуемой дальности (d) до проекции фазового центра пеленгатора, т.е. контролируют выполнение условий:
 ,
,
где δθ и δd - заданные максимально допустимые абсолютные погрешности по азимуту и дальности. При одновременном выполнении этих условий УУ-2 12 формирует оповещение оператору о занятии тестовым ИРИ требуемого углового положения.
После установки тестового ИРИ в k-ю угловую позицию выполняют измерения векторов АФР z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом посредством:
- передачи оповещения УУ-1 7 об установке ПАПС с ГНСС-ПР 3 в заданную угловую позицию и готовности к работе ИРИ;
- формирования сигналов управления пеленгатором по частоте и длительности пеленгации на заданной частоте;
- формирования сигналов управления для УУ-2 12 на изменение режимов работы генератора сигналов ИРИ и о завершении измерений и переходе к следующей угловой позиции или завершении процесса калибровки;
- получение данных от АПСП 6 о значениях z(k,v),  ,
,  для заданных частот и их хранение.
для заданных частот и их хранение.
Для выполнения пункта 9 проводят определение векторов АФР  ,
,  для каждого направления методом конечных элементов на основе построенной трехмерной модели при помощи ПО-МКЭ 18, предназначенного для решения электродинамических задач методом конечных элементов, установленного на ПЭВМ 17. Векторы АФР
для каждого направления методом конечных элементов на основе построенной трехмерной модели при помощи ПО-МКЭ 18, предназначенного для решения электродинамических задач методом конечных элементов, установленного на ПЭВМ 17. Векторы АФР  ,
,  получают как комплексные амплитуды напряжения на выходах элементов антенной решетки пеленгатора.
получают как комплексные амплитуды напряжения на выходах элементов антенной решетки пеленгатора.
Для выполнения пункта 10 проводят верификацию результатов измерений z(k,v) с помощью рассчитанных векторов АФР  . Если фазы компонент векторов z(k,v) и
. Если фазы компонент векторов z(k,v) и  отличаются больше, чем на γ, определяемое требованиями к точности пеленгатора, то векторы z(k,v) считаются не верифицированными, и их измерения повторяют до тех пор, пока они не пройдут верификацию, либо вместо векторов z(k,v) используют вектора
отличаются больше, чем на γ, определяемое требованиями к точности пеленгатора, то векторы z(k,v) считаются не верифицированными, и их измерения повторяют до тех пор, пока они не пройдут верификацию, либо вместо векторов z(k,v) используют вектора  .
.
Затем обрабатывают результаты измерений и расчетов и определяют калибровочные векторы АФР bk на основе векторов z(k,v),  ,
,  и
и  ,
,  по следующему правилу: для множества
по следующему правилу: для множества  определение калибровочных векторов bk осуществляется на основе векторов z(k,v), прошедших верификацию. Вместо векторов z(k,v) не прошедших верификацию, используются векторы
определение калибровочных векторов bk осуществляется на основе векторов z(k,v), прошедших верификацию. Вместо векторов z(k,v) не прошедших верификацию, используются векторы  . Для множества
. Для множества  определение калибровочных векторов bk осуществляется на основе векторов
определение калибровочных векторов bk осуществляется на основе векторов  .
.
Следовательно, предлагаемый способ, так же, как и прототип, обладает высокой точностью калибровки за счет использования НАП ГНСС в дифференциальном и кинематическом режиме, в частности, высокоточных приемников ГНСС в режиме RTK. Кроме того, он имеет преимущество в виде повышения точности калибровки мобильного пеленгатора - корреляционного интерферометра в секторе углов, где условия для проведения измерений не обеспечены.
Таким образом, предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1.

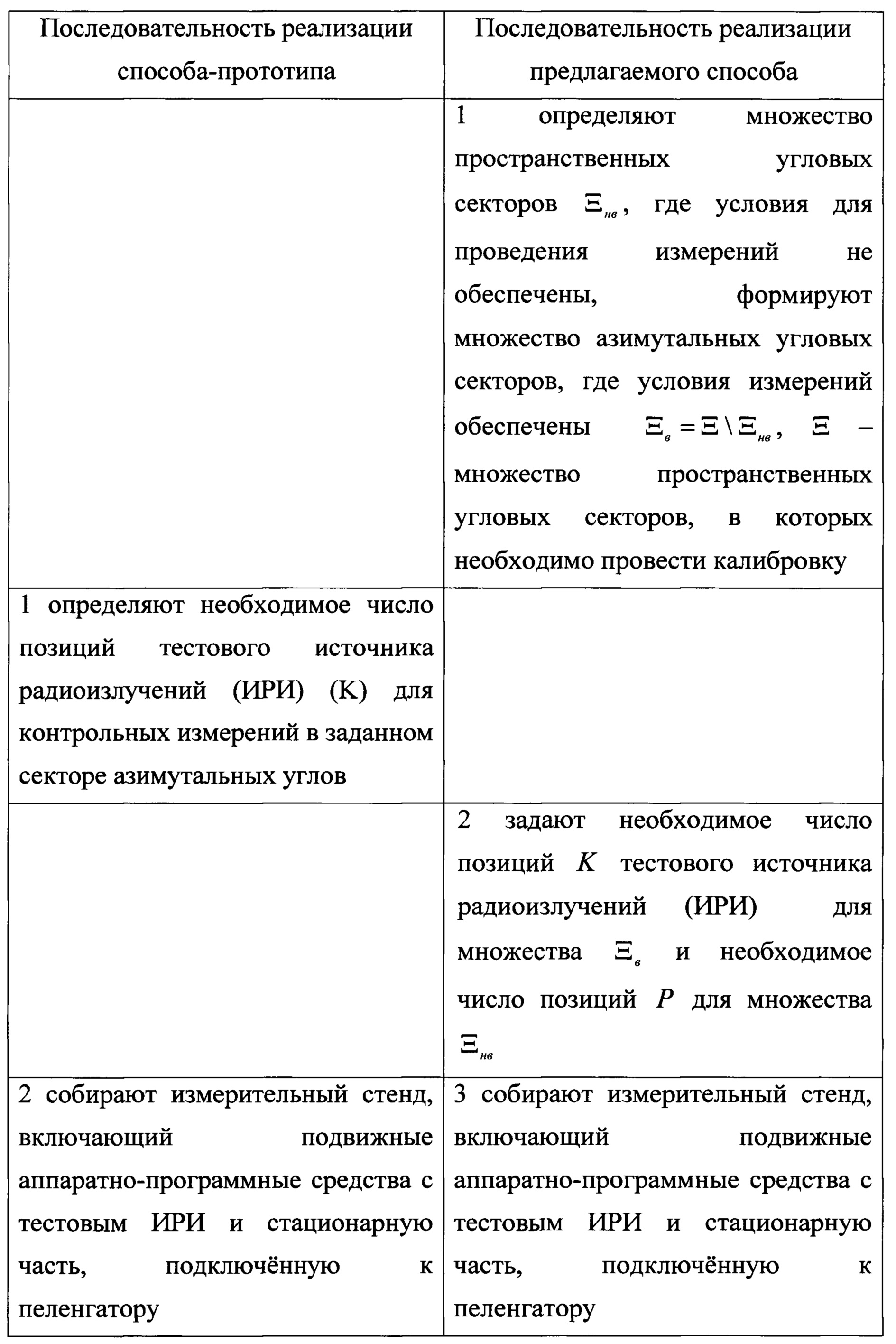
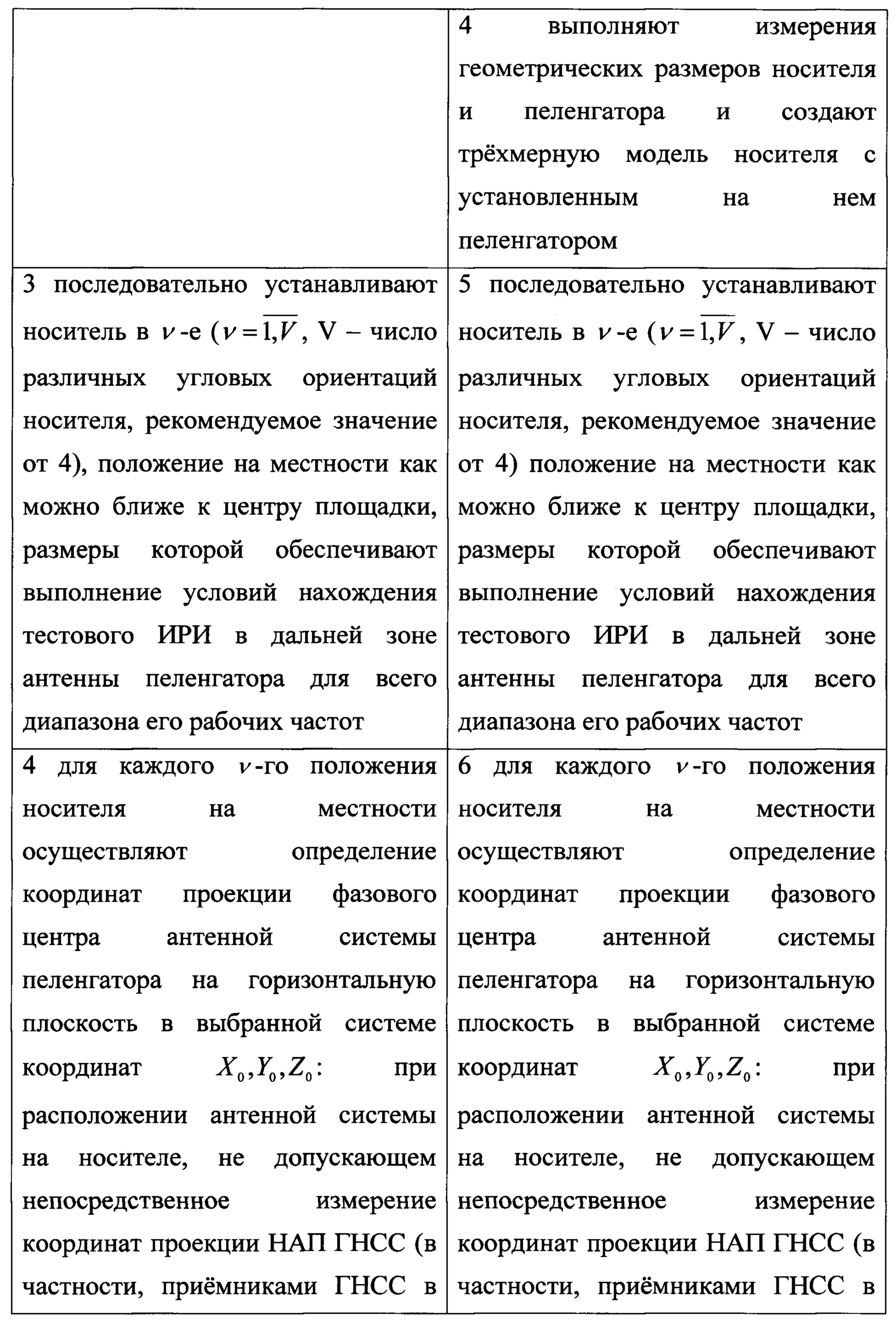
Из представленной таблицы сравнения последовательности реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе, относительно способа-прототипа, введена новая совокупность операций по определению сектора углов, где условия для проведения измерений не обеспечены, формированию сектора, где условия измерений обеспечены, выполнению измерений геометрических размеров носителя и пеленгатора и создания трехмерной модели носителя с установленным на нем пеленгатором, определению векторов АФР для каждого направления методом конечных элементов, совместной обработке результатов измерений и расчетов, и определению калибровочных векторов, приводящих к положительному эффекту - повышению точности калибровки мобильного пеленгатора - корреляционного интерферометра в азимутальных и угломестных секторах углов, где условия для проведения измерений не обеспечены, при сохранении высокой точности калибровки в азимутальных секторах, в которых условия для проведения измерений обеспечиваются.
Таким образом, предлагаемый способ так же, как и способ-прототип, позволяет выполнить калибровку мобильного пеленгатора, реализующего алгоритм корреляционного интерферометра, с заданной точностью расположения ИРИ. Кроме того, предлагаемый способ, относительно способа-прототипа, обеспечивает повышение точности калибровки мобильного пеленгатора - корреляционного интерферометра в азимутальных и угломестных секторах углов, где условия для проведения измерений не обеспечены, при сохранении высокой точности калибровки в азимутальных секторах, в которых условия для проведения измерений обеспечиваются.
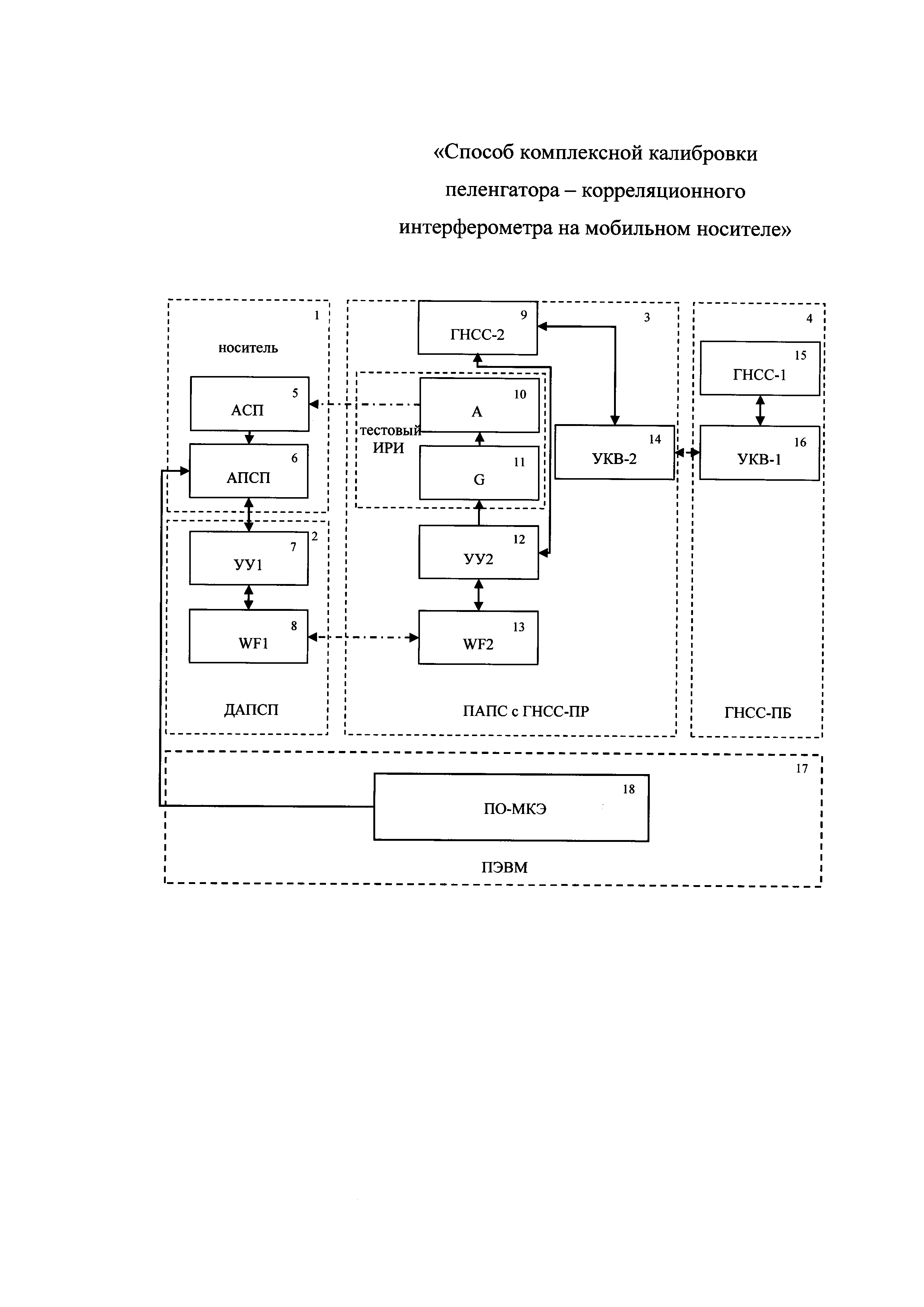
На фиг. показана схема измерительного стенда, реализующего заявляемый способ.
На фигуре:
1 - носитель;
АСП 5 - антенная система пеленгатора;
АПСП 6 - аппаратно-программные средства пеленгатора;
ДАПСП 2 - дополнительные аппаратно-программные средства пеленгатора, входящие в состав измерительного стенда;
УУ1 7, УУ2 12 - устройства управления, аппаратно реализованные на ЭВМ;
WF1 8, WF2 13 - устройства беспроводной связи (Wi-Fi роутер, Wi-Fi адаптер);
ПАПС с ГНСС-ПР 3 - подвижные аппаратно-программные средства с приемником-ровером ГНСС;
G 11 - генератор сигналов ИРИ;
А 10 - антенна ИРИ;
ГНСС-1 15, ГНСС-2 9 - приемники ГНСС;
УКВ-1 16,УКВ-2 14 - УКВ-модемы приемников ГНСС;
ГНСС-ПБ 4 - приемник-база ГНСС;
ПЭВМ 17 - персональная электронно-вычислительная машина;
ПО-МКЭ 18 - программное обеспечение для моделирования методом конечных элементов.
В представленном на фиг. варианте аппаратная часть НАП ГНСС состоит из двух приемников ГНСС (ГНСС-1 15, ГНСС-2 9), двух УКВ-модемов (УКВ-1 16, УКВ-2 14) и ЭВМ (устройств управления УУ-1 7, УУ-2 12), при этом для реализации дифференциального и кинематического режима ее функционирования используется режим Real Time Kinematic (RTK) - фазовый дифференциальный режим определения местоположения подвижных объектов в режиме реального времени, обеспечивающий сантиметровую точность определения координат [8, с. 23 - Евстафьев О.В. Наземная инфраструктура ГНСС для точного позиционирования // Геопрофи. - 2008. - №1. - С. 21-24]. Один из приемников (ГНСС-2 9) реализует функции ровера - подвижной части НАП ГНСС, расположенной на одной вертикальной оси с антенной тестового ИРИ, второй приемник (ГНСС-1 15) - функции базы - контрольной станции, передающей посредством УКВ-модемов дифференциальные поправки роверу в режиме реального времени. Получение, обработка и визуализация текущих координат приемника-ровера с учетом дифференциальных поправок в выбранной системе координат осуществляется на устройстве управления УУ-2 12. Кроме того, на базе устройства управления УУ-2 12 осуществляется:
- решение задачи определения координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0,Y0,Z0 по автоматически сохраняемым измерениям приемника-ровера координат N вспомогательных точек (N≥3) и дополнительно измеряемым (например, тахеометром, установленным в точке проекции фазового центра) и вводимым в специальное программное обеспечение геометрических величин, связывающих координаты вспомогательных точек с проекцией фазового центра;
- хранение результатов измерения или вычисления координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X0,Y0,Z0;
- хранение результатов измерения с помощью приемника-ровера НАП ГНСС координат точки базового направления в выбранной системе координат Xb,Yb,Zb;
- хранение данных о требуемых К угловых положениях, диапазоне и шаге изменения частоты излучения тестового ИРИ;
- вычисление на основе координат X0,Y0,Z0, Xb,Yb,Zb и текущего положения тестового ИРИ в системе координат, в которой производятся измерения и вычисления, его текущего положения в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя;
- вычисление и визуализация отклонений текущего положения тестового ИРИ от требуемой k-й угловой позиции по азимутальному положению и дальности до проекции фазового центра пеленгатора по ранее определенным данным;
- управление режимами работы генератора сигналов ИРИ G 11;
- беспроводная связь посредством устройств WF1 8, WF2 13 с УУ-1 7;
- оповещение оператора, осуществляющего перемещение ПАПС с ГНСС-ПР 3 о завершении измерений и переходе к следующей угловой позиции или завершении процесса калибровки;
- оповещение УУ-1 7 об установке ПАПС с ГНСС-ПР 3 в заданную угловую позицию и готовности к работе ИРИ.
Кроме того, на базе устройства управления УУ-1 7 осуществляется:
- формирование сигналов управления для УУ-2 12 на изменение режимов работы генератора сигналов ИРИ G 11 и о завершении измерений и переходе к следующей угловой позиции или завершении процесса калибровки;
- беспроводная связь посредством устройств WF1 8, WF2 13 с УУ-2 12;
- формирование сигналов управления пеленгатором по частоте и длительности пеленгации на заданной частоте;
- получение данных от АПСП 6 о значениях z(k,v),  ,
,  для заданных частот и их хранение;
для заданных частот и их хранение;
- обработка результатов измерений и определение калибровочных векторов АФР bk на основе измеренных векторов z(k,v),  ,
,  .
.
Помимо УКВ-модемов для реализации передачи данных от базы к роверу могут быть использованы GSM-модемы или иные средства.
Наличие в составе НАП ГНСС двух приемников ГНСС 9 и 15 позволяет применить при нахождении местоположения объектов (проекции фазового центра антенной системы пеленгатора, точки базового направления и тестового ИРИ) один из двух методов определения координат - относительный или абсолютный.
Кроме того, при обеспечении требуемой точности могут быть использованы локальные, региональные или широкозонные дифференциальные подсистемы ГНСС. В этом случае в составе НАП ГНСС измерительного стенда достаточно использование одного приемника ГНСС.
Способ комплексной калибровки пеленгатора - корреляционного интерферометра на мобильном носителе, при котором собирают измерительный стенд, включающий подвижные аппаратно-программные средства с тестовым источником радиоизлучения и стационарную часть, подключенную к пеленгатору, последовательно устанавливают носитель в v-e (, V - число различных угловых ориентаций носителя, рекомендуемое значение от 4) положение на местности как можно ближе к центру площадки, размеры которой обеспечивают выполнение условий нахождения тестового источника радиоизлучения в дальней зоне антенны пеленгатора для всего диапазона его рабочих частот, для каждого v-го положения носителя на местности осуществляют определение координат проекции фазового центра антенной системы пеленгатора на горизонтальную плоскость в выбранной системе координат X,Y,Z: при расположении антенной системы на носителе, не допускающем непосредственное измерение координат проекции наземной аппаратурой потребителя глобальной навигационной спутниковой системы - приемниками глобальной навигационной спутниковой системы в режиме Real Time Kinematic, оно осуществляется путем измерения координат N вспомогательных точек (N≥3) и геометрических величин, связывающих их с проекцией фазового центра с последующим составлением и решением оптимизационной задачи определения координат проекции фазового центра антенной системы пеленгатора в выбранной системе координат, или при расположении антенной системы на носителе, допускающем непосредственное измерение координат проекции фазового центра наземной аппаратурой потребителя глобальной навигационной спутниковой системы - приемниками глобальной навигационной спутниковой системы, это измерение осуществляется путем соответствующей установки элементов наземной аппаратуры потребителя глобальной навигационной спутниковой системы - приемника-ровера глобальной навигационной спутниковой системы, для каждого v-го положения носителя на местности фиксируют направление продольной (строительной) оси носителя путем определения координат точки базового направления в выбранной системе координат X,Y,Z, последовательно перемещают подвижные аппаратно-программные средства измерительного стенда, для каждого дополнительно осуществляют установку тестового источника радиоизлучения в k-ю угловую позицию с заданной точностью по азимутальному положению и дальности до проекции фазового центра пеленгатора по данным о текущем положении тестового источника радиоизлучения в полярной системе координат, связанной с проекцией фазового центра пеленгатора и продольной осью носителя, рассчитываемых на базе подвижных аппаратно-программных средств на основе данных о его текущих координатах, выдаваемых приемником-ровером глобальной навигационной спутниковой системы и X,Y,Z, X,Y,Z, выполнение измерений векторов амплитудно-фазовых распределений z(k,v) для различных частот излучения в заданном диапазоне и с фиксированным шагом, отличающийся тем, что определяют множество пространственных угловых секторов Ξ, где условия для проведения измерений не обеспечены, формируют множество азимутальных угловых секторов, где условия измерений обеспечены Ξ=Ξ \ Ξ, Ξ - множество пространственных угловых секторов, в которых необходимо провести калибровку, задают необходимое число позиций K тестового источника радиоизлучений для множества Ξ и необходимое число позиций Р для множества Ξ, выполняют измерения геометрических размеров носителя и пеленгатора и создают трехмерную модель носителя с установленным на нем пеленгатором, проводят определение векторов амплитудно-фазовых распределений , для каждого направления методом конечных элементов, совместно обрабатывают результаты измерений и расчетов и определяют калибровочные векторы амплитудно-фазовых распределений b на основе векторов z(k,v), , и , .
Симметричный вибратор укв
Симметричный вибратор
Волноводно-микрополосковый переход с запредельной нагрузкой
Антенная решетка
Резонатор на поверхностных акустических волнах с использованием отражателей в качестве нагревательных элементов
Способ и устройство электрического управления фазой волноводного фазовращателя
Запредельная волноводная нагрузка
Миниатюрный широкополосный квадратурный направленный ответвитель на элементах с сосредоточенными параметрами
Способ формирования диаграммы направленности
Устройство формирования диаграммы направленности активной фазированной антенной решетки
Симметричный вибратор укв
Симметричный вибратор
Волноводно-микрополосковый переход с запредельной нагрузкой
Антенная решетка
Резонатор на поверхностных акустических волнах с использованием отражателей в качестве нагревательных элементов
Способ и устройство электрического управления фазой волноводного фазовращателя
Запредельная волноводная нагрузка
Миниатюрный широкополосный квадратурный направленный ответвитель на элементах с сосредоточенными параметрами
Способ формирования диаграммы направленности
Устройство формирования диаграммы направленности активной фазированной антенной решетки

