Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ОТОБРАЖЕНИЯ РАБОЧЕГО РЕЖИМА УСТРОЙСТВА
Вид РИД
Изобретение
[0001] По настоящей заявки испрашивается приоритет в соответствии с китайской заявкой на патент №201510496957.4, поданной 13 августа 2015 г., содержание которой полностью включено в настоящую заявку в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится в целом к области техники отображения и, в частности, к способу и устройству отображения рабочего режима устройства.
УРОВЕНЬ ТЕХНИКИ
[0003] В повседневной жизни и работе людям требуются разнообразные бытовые приборы. Например, обычные бытовые приборы могут включать в себя кондиционер, холодильник, стиральную машину, водонагреватель, воздухоочиститель, водоочиститель и т.п.
[0004] Бытовые приборы, как правило, могут иметь различные рабочие режимы. Например, рабочие режимы кондиционера могут включать в себя различные рабочие режимы, такие как охлаждение, обогрев, снижение влажности, вентиляцию и т.п. Рабочий режим устройства всегда может быть отображен на индикаторной панели такого устройства или на экране пульта дистанционного управления в виде текста или пиктограммы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В вариантах осуществления изобретения предлагаются способ и устройство отображения рабочего режима устройства.
[0006] Согласно первому аспекту вариантов осуществления настоящего изобретения, предлагается способ отображения рабочего режима устройства, который содержит: получение данных по рабочему режиму устройства; получение модели анимации частиц, соответствующей рабочему режиму; и определение, согласно модели анимации частиц, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведение, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц, где n≥2, и n является целым числом.
[0007] Или же, модель анимации частиц может включать в себя информацию о траектории движения, соответствующей каждой частице в отдельности. Определение, согласно модели анимации частиц, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведение, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, при этом анимации частиц может включать в себя: определение для каждой частицы положения в каждом из n кадров изображения в соответствии с информацией о траектории движения, соответствующей частице; и воспроизведение n кадров изображения для создания анимации частиц.
[0008] Или же, способ дополнительно включает в себя: выявление для i-ой частицы, находится ли положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения за пределами заданной области отображения, где i и j являются положительными целыми числами; и установку p(i,j+1) в качестве исходного положения i-ой частицы, если положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения.
[0009] Или же, определение для каждой частицы положения в каждом из n кадров изображения в соответствии с информацией о траектории движения, соответствующей частице, может включать в себя: определение для i-ой частицы положения p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения в соответствии с положением p(i,j) i-ой частицы в j-ом кадре изображения и функцией траектории движения  , соответствующей i-ои частице, где i и j являются положительными целыми числами; причем положение p(i,1) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
, соответствующей i-ои частице, где i и j являются положительными целыми числами; причем положение p(i,1) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
[0010] В ином случае, траектория движения, соответствующая функции траектории движения , может включать в себя траекторию прямолинейного движения, траекторию криволинейного движения, траекторию кругового движения и траекторию колебательного движения, либо любое их сочетание.
[0011] Или же, модель анимации частиц может дополнительно включать в себя информацию о стиле отображения, соответствующем каждой частице в отдельности; определение, согласно модели анимации частиц, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведение, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц может дополнительно включать в себя: определение для каждой частицы стиля отображения в каждом из n кадров изображения в соответствии с информацией о стиле отображения, соответствующем частице; причем стиль отображения может включать в себя цвет, размер, форму и время отображения, либо любое их сочетание.
[0012] Или же, способ дополнительно включает в себя: формирование для каждого кадра изображения линии, последовательно соединяющей m частиц, входящих в кадр изображения, где m является целым числом, которое больше или равно 2.
[0013] Согласно второму аспекту вариантов осуществления настоящего изобретения, предлагается устройство отображения рабочего режима устройства, которое содержит: модуль получения режима, выполненный с возможностью получения рабочего режима устройства; модуль получения модели, выполненный с возможностью получения модели анимации частиц, соответствующей рабочему режиму; и модуль воспроизведения анимации, выполненный с возможностью определения, согласно модели анимации частиц, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведения, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц, где n≥2, и n является целым числом.
[0014] Или же, модель анимации частиц может включать в себя информацию о траектории движения, соответствующей каждой частице в отдельности; модуль воспроизведения анимации может включать в себя: субмодуль определения положения и субмодуль воспроизведения анимации; субмодуль определения положения выполнен с возможностью определения для каждой частицы положения в каждом из n кадров изображения в соответствии с информацией о траектории движения, соответствующей частице; а субмодуль воспроизведения анимации, выполнен с возможностью воспроизведения n кадров изображения для создания анимации частиц.
[0015] Или же, модуль воспроизведения анимации может дополнительно включать в себя субмодуль выявления и субмодуль установки; субмодуль выявления выполнен с возможностью выявления для i-ой частицы, находится ли положение p(i,j+l) i-ой частицы в (j+1)-ом кадре изображения за пределами заданной области отображения, где i и j являются положительными целыми числами; а субмодуль установки выполнен с возможностью установки p(i,j+1) в качестве исходного положения i-ой частицы, если положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения.
[0016] Или же, субмодуль определения положения выполнен с возможностью определения для i-ой частицы положения p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения в соответствии с положением p(i,j) i-ой частицы в j-ом кадре изображения и функцией траектории движения , соответствующей i-ой частице, где i и j являются положительными целыми числами; причем положение p(i,j) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
[0017] Или же, траектория движения, соответствующая функции траектории движения , может включать в себя траекторию прямолинейного движения, траекторию криволинейного движения, траекторию кругового движения и траекторию колебательного движения, либо любое их сочетание.
[0018] Или же, модель анимации частиц может дополнительно включать в себя информацию о стиле отображения, соответствующем каждой частице в отдельности; модуль воспроизведения анимации может дополнительно включать в себя субмодуль определения стиля; субмодуль определения стиля выполнен с возможностью определения для каждой частицы стиля отображения в каждом из n кадров изображения в соответствии с информацией о стиле отображения, соответствующем частице; причем стиль отображения может включать в себя цвет, размер, форму и время отображения, либо любое их сочетание.
[0019] Или же, модуль воспроизведения анимации может дополнительно включать в себя субмодуль формирования линий; причем субмодуль формирования линий выполнен с возможностью формирования для каждого кадра изображения линии, последовательно соединяющей m частиц, входящих в кадр изображения, где m является целым числом, которое больше или равно 2.
[0020] Согласно третьему аспекту вариантов осуществления настоящего изобретения, предлагается устройство отображения рабочего режима устройства, которое содержит: процессор и запоминающее устройство для хранения выполняемых процессором инструкций, причем процессор выполнен с возможностью: определения рабочего режима устройства; получения модели анимации частиц, соответствующей рабочему режиму; и определения, согласно модели анимации частиц, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведения, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц, где n≥2, и n является целым числом.
[0021] Варианты осуществления настоящего изобретения могут обеспечить по меньшей мере некоторые из следующих положительных результатов: с помощью отображения рабочего режима устройства в виде анимации частиц проблема представления единичного отображения, вызванная изображением рабочего режима устройства в виде текста или пиктограммы в известном уровне техники, может быть решена, что позволит достичь технического эффекта отображения рабочего режима устройства более понятным и наглядным образом и поможет расширить взаимодействие между пользователем и устройством.
[0022] Необходимо понимать, что предшествующее общее описание и следующее подробное описание носят лишь иллюстративный характер и не ограничивают настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0023] Сопроводительные чертежи, которые включены в данное описание и являются его частью, иллюстрируют варианты осуществления в соответствии с изобретением и совместно с описанием поясняют принципы изобретения.
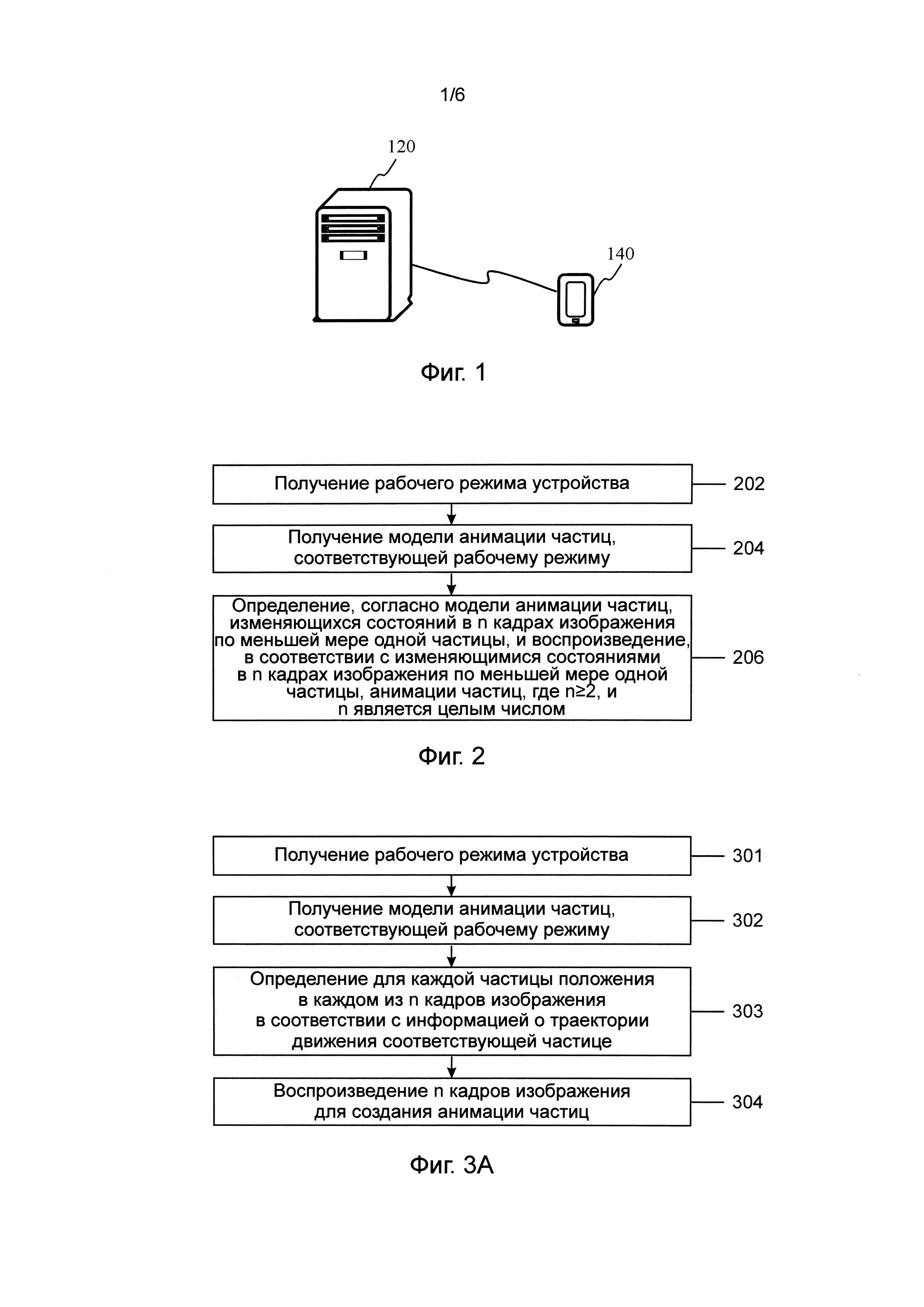
[0024] Фиг. 1 - схема, иллюстрирующая среду осуществления в соответствии с примером осуществления.
[0025] Фиг. 2 - функциональная блок-схема, иллюстрирующая способ отображения рабочего режима устройства в соответствии с примером осуществления.
[0026] Фиг. 3А - функциональная блок-схема, иллюстрирующая способ отображения рабочего режима устройства в соответствии с другим примером осуществления.
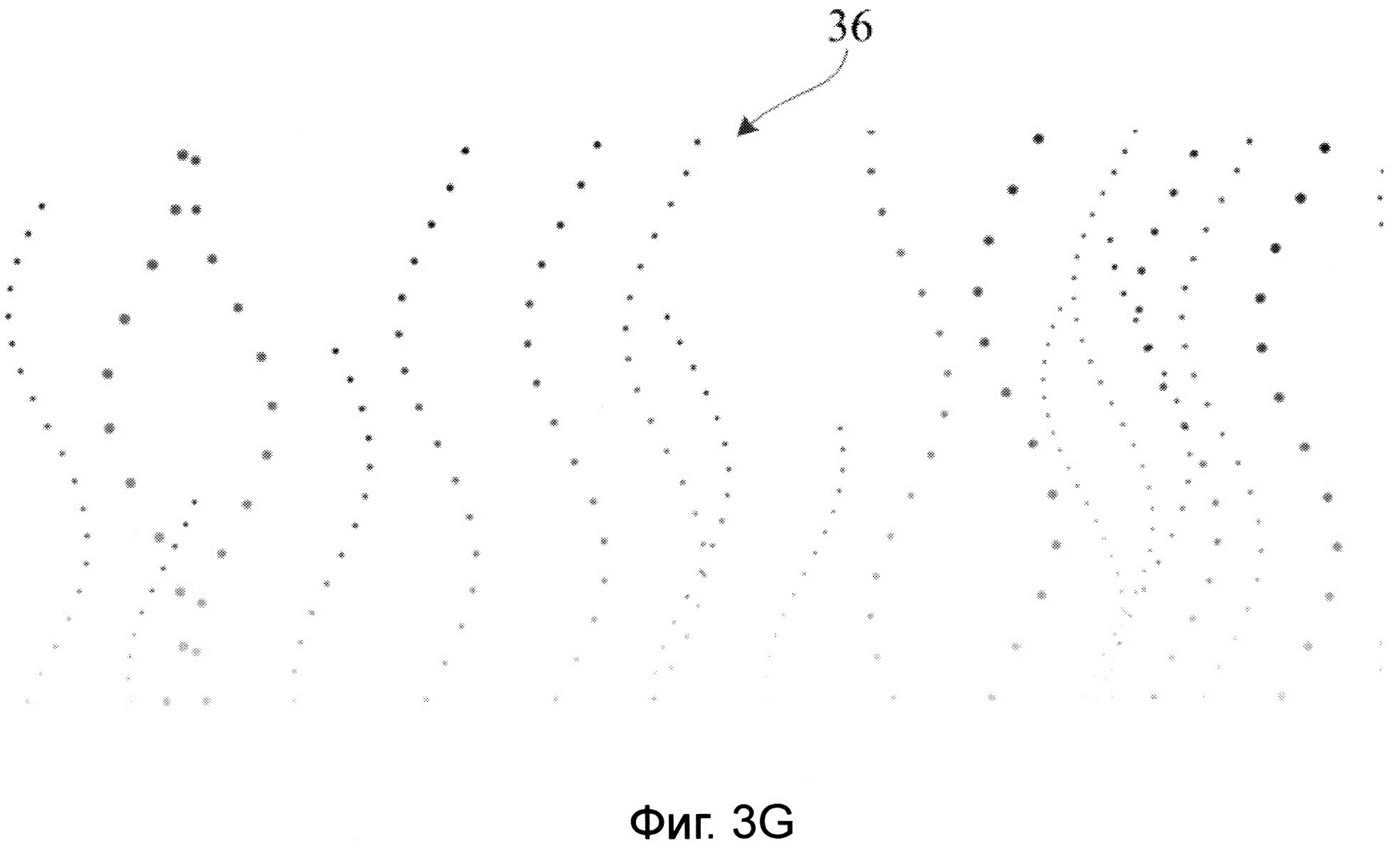
[0027] Фиг. 3В-3Н - схемы, иллюстрирующие траекторию движения частицы в соответствии с примером осуществления.
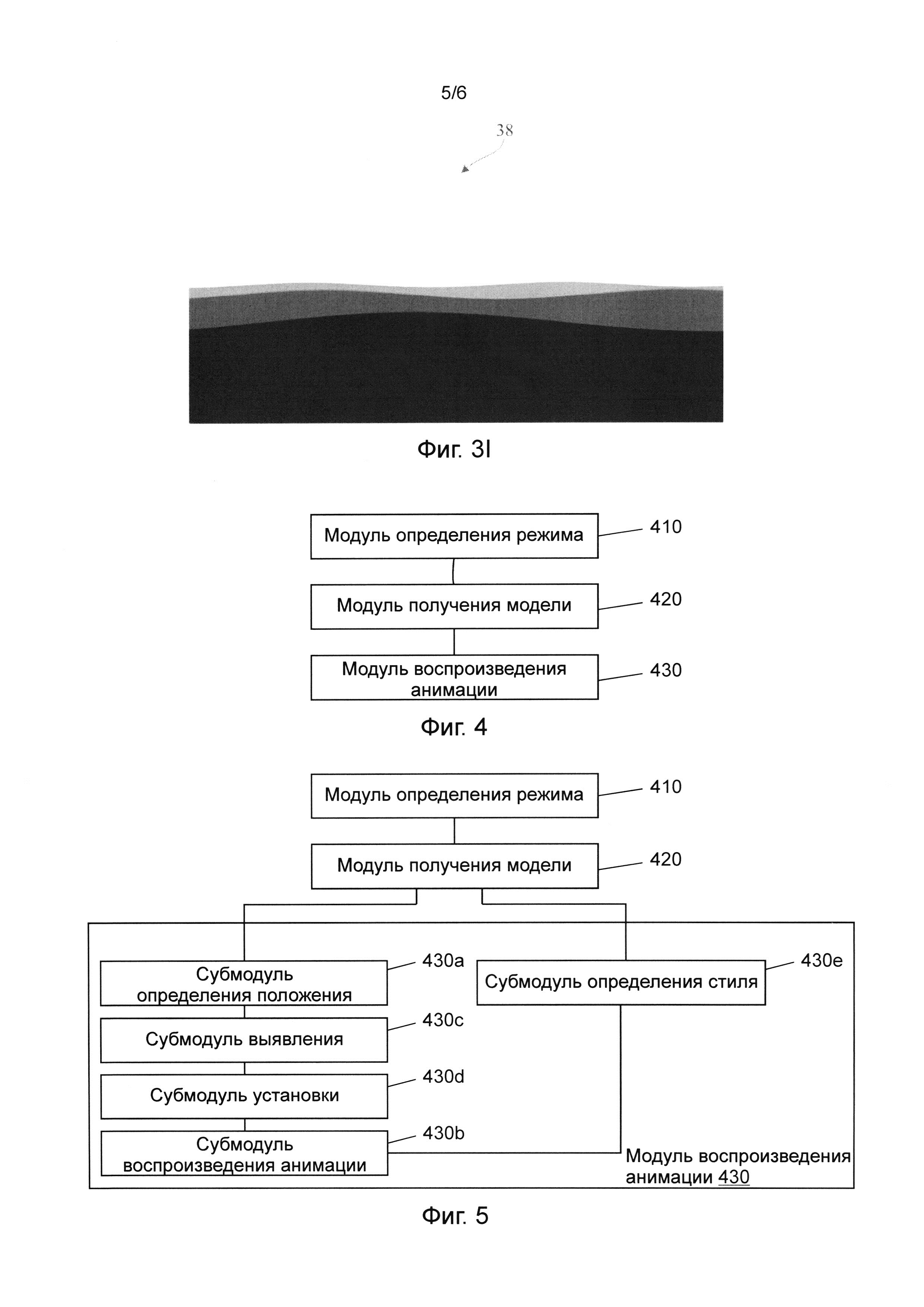
[0028] Фиг. 3I - иллюстрация кадра изображения, в котором линия выступает в качестве элемента в соответствии с другим примером осуществления.
[0029] Фиг. 4 - структурная блок-схема, иллюстрирующая устройство отображения рабочего режима устройства в соответствии с примером осуществления.
[0030] Фиг. 5 - структурная блок-схема, иллюстрирующая устройство отображения рабочего режима устройства в соответствии с другим примером осуществления.
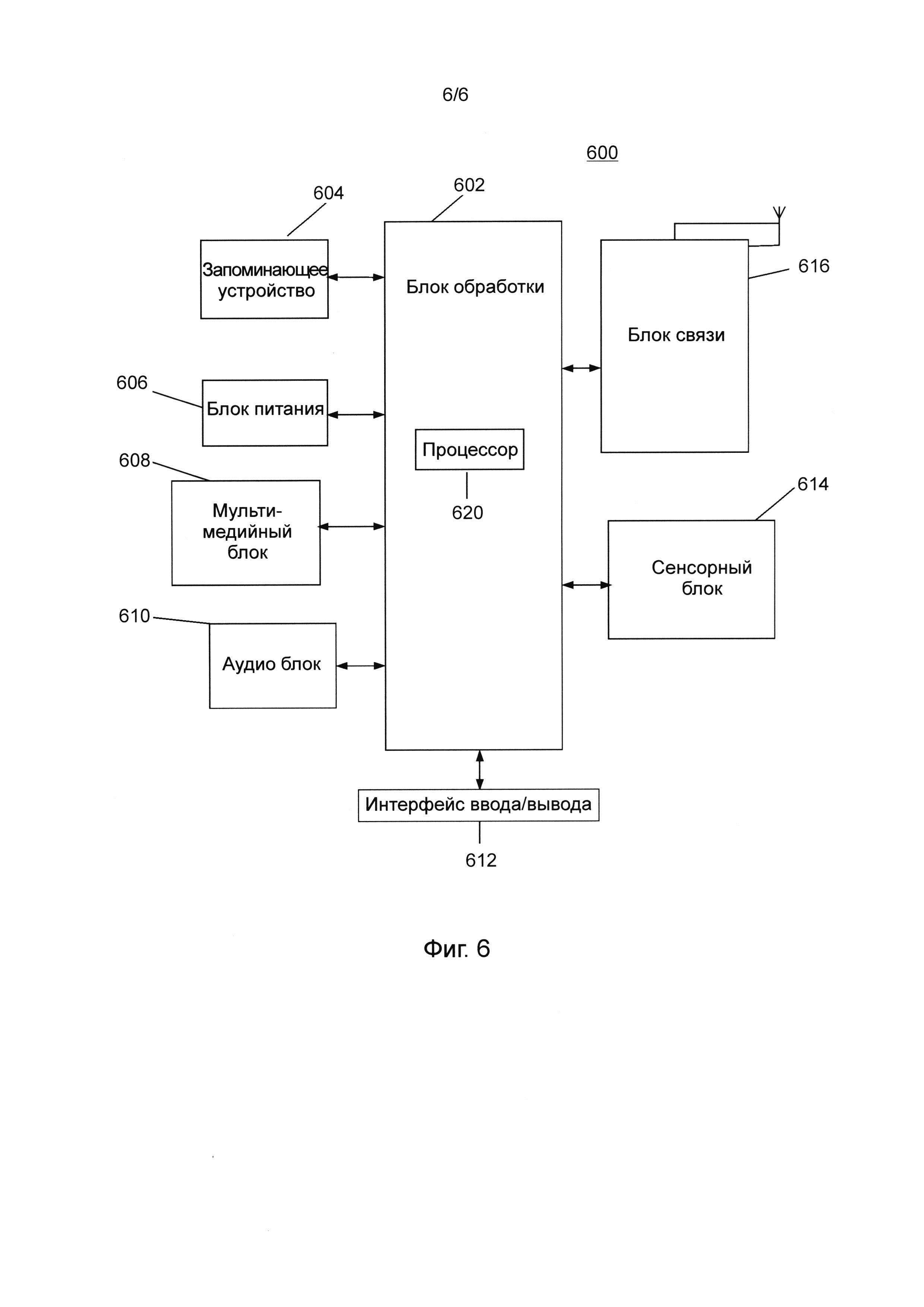
[0031] Фиг. 6 - блок-схема, иллюстрирующая устройство в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0032] Далее следует подробное описание примеров осуществления, примеры которых проиллюстрированы на сопроводительных чертежах. В нижеследующем описании представлены ссылки на сопроводительные чертежи, в которых одни и те же числовые позиции на разных чертежах представляют одни и те же или аналогичные элементы, если не указано иное. Формы реализации, представленные в последующем описании примеров осуществления, не представляют всех форм реализации, соответствующих изобретению. Напротив, они являются только примерами устройства и способов, соответствующих аспектам, связанным с изобретением, как изложено в прилагаемой формуле изобретения.
[0033] На фиг. 1 показана схема, иллюстрирующая среду осуществления в соответствии с примером осуществления. Среда осуществления может включать в себя бытовой прибор 120.
[0034] Бытовой прибор 120 может быть традиционным бытовым прибором либо интеллектуальным бытовым прибором. Например, интеллектуальные бытовые приборы могут включать в себя, помимо прочего, интеллектуальный кондиционер, интеллектуальный холодильник, интеллектуальную стиральную машину, интеллектуальный водонагреватель, интеллектуальную электроварку, интеллектуальный воздухоочиститель, интеллектуальный водоочиститель и т.п.
[0035] Или же, как показано на фиг. 1, среда осуществления может дополнительно включать в себя: устройство 140 управления.
[0036] Устройство 140 управления может быть пультом дистанционного управления или мобильным терминалом, таким как мобильный телефон, планшет и т.п. Устройство 140 управления может быть подключено к бытовому прибору 120 через проводное или беспроводное соединение. Устройство 140 управления может использоваться для управления включением и выключением бытового прибора 120 и рабочим режимом бытового прибора 120. Проводное соединение может включать в себя, но не ограничиваться, проводную сеть, универсальную последовательную шину (USB) и т.п.; беспроводное соединение может включать в себя, помимо прочего, беспроводную сеть, инфракрасное излучение и т.п.
[0037] Кроме того, связь между устройством 140 управления и бытовым прибором 120 может быть связью один-к-одному или один-ко-многим. Это означает, что устройство 140 управления может быть использовано для автономного управления одним бытовым прибором 120, либо для управления множеством аналогичных или различных бытовых приборов 120.
[0038] В бытовом приборе 120 и/или устройстве 140 управления может быть предусмотрена индикаторная панель. Индикаторная панель может использоваться, чтобы отображать анимацию частиц для отображения рабочего режима устройства, рассматриваемого в вариантах осуществления настоящего изобретения.
[0039] Следовательно, способ отображения рабочего режима устройства, описанный в вариантах осуществления настоящего изобретения, может использоваться в бытовом приборе 120 и также может использоваться в устройстве 140 управления, подключенном к бытовому прибору 120. Для упрощения описания в следующих ниже вариантах осуществления соответствующих способов устройство управления используется как основной блок при осуществлении соответствующих этапов в качестве примера, если иное не оговорено в описании, однако данным контекстом оно не ограничивается.
[0040] На фиг. 2 показана функциональная блок-схема, иллюстрирующая способ отображения рабочего режима устройства в соответствии с примером осуществления. Способ может включать в себя следующие этапы.
[0041] На этапе 202 может быть определен рабочий режим устройства.
[0042] На этапе 204 может быть получена модель анимации частиц, соответствующая рабочему режиму.
[0043] На этапе 206 изменяющиеся состояния в n кадрах изображения по меньшей мере одной частицы могут быть определены согласно модели анимации частиц, и анимация частиц может быть воспроизведена в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, где n≥2, и n является целым числом.
[0044] В заключение необходимо отметить, что с помощью отображения рабочего режима устройства в виде анимации частиц способ отображения рабочего режима устройства, описанный в вариантах осуществления настоящего изобретения, может решить проблему представления единичного отображения, вызванную изображением рабочего режима устройства в виде текста или пиктограммы в известном уровне техники, что позволит достичь технического эффекта отображения рабочего режима устройства более понятным и наглядным образом и поможет улучшить взаимодействие между пользователем и устройством.
[0045] На фиг. 3А показана функциональная блок-схема, иллюстрирующая способ отображения рабочего режима устройства в соответствии с другим примером осуществления. В данном варианте осуществления указанный способ используется в устройстве управления, подключенном к бытовому прибору, в качестве примера. Способ может включать в себя следующие этапы.
[0046] На этапе 301 могут быть получен рабочий режим устройства.
[0047] Устройство управления может получать рабочий режим бытового прибора. Бытовые приборы могут включать в себя, но не ограничиваться, кондиционер, холодильник, стиральную машину, водонагреватель, электроварку воздухоочиститель, водоочиститель и т.п. Бытовой прибор может быть традиционным бытовым прибором либо интеллектуальным бытовым прибором.
[0048] Бытовой прибор, как правило, может иметь различные рабочие режимы. Например, рабочие режимы кондиционера могут включать в себя различные рабочие режимы, такие как охлаждение, обогрев, снижение влажности, вентиляцию и т.п. Рабочие режимы электроварки, например, могут включать в себя различные рабочие режимы, такие как приготовление риса, приготовление рисовой каши, приготовление супа, тепловое консервирование и т.п.
[0049] На этапе 302 может быть получена модель анимации частиц, соответствующая рабочему режиму.
[0050] Устройство управления может получать модель анимации частиц, соответствующую рабочему режиму. В одном возможном варианте реализации устройство управления может хранить по меньшей мере одну совокупность взаимосвязей между рабочим режимом и моделью анимации частиц. Устройство управления может запрашивать и получать соответствующую модель анимации частиц из упомянутой выше взаимосвязи после определения режима работы бытового прибора. Кроме того, для одного бытового прибора его различные рабочие режимы обычно могут соответствовать различным моделям анимации частиц.
[0051] Модель анимации частиц может использоваться для определения изменяющихся состояний каждой частицы в анимации частиц. Модель анимации частиц может включать в себя информацию о траектории движения, соответствующей каждой частице в отдельности. Модель анимации частиц может использоваться для определения изменяющихся состояний положения каждой частицы в анимации частиц. Информация о траектории движения, соответствующей каждой частице, может использоваться для определения изменяющихся состояний положения частицы. Информация о траектории движения может быть функцией траектории движения либо может быть заданным положением частицы в каждом кадре изображения, или может быть случайным алгоритмом, используемым для определения положения частицы в каждом кадре изображения.
[0052] В ином случае, модель анимации частиц может дополнительно включать в себя информацию о стиле отображения, соответствующем каждой частице в отдельности. Модель анимации частиц может далее использоваться для определения изменяющихся состояний стиля отображения каждой частицы в анимации частиц. Информация о стиле отображения, соответствующем каждой частице, может использоваться для определения изменяющихся состояний стиля отображения частицы. Стиль отображения может включать в себя, но не ограничиваться, цвет, размер, форму и время отображения, либо любое их сочетание. Различные частицы могут соответствовать одному и тому же стилю отображения либо различным стилям отображения. Для каждой частицы ее стиль отображения может оставаться неизменным либо изменяться во временном интервале.
[0053] На этапе 303 для каждой частицы положение в каждом из n кадров изображения может быть определено в соответствии с информацией о траектории движения, соответствующей частице, где n≥2, и n является целым числом.
[0054] Модель анимации частиц может включать в себя изменяющиеся состояния по меньшей мере одной частицы в n последовательных кадрах изображения. Для каждой частицы устройство управления может определять положение частицы в каждом из n последовательных кадров изображения в соответствии с информацией о траектории движения, соответствующей частице.
[0055] В примере, где информация о траектории движения является функцией траектории движения, в одном возможном варианте реализации, для i-ой частицы положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения может быть определено в соответствии с положением p(i,j) i-ой частицы в j-ом кадре изображения и функцией траектории движения  , соответствующей i-ои частице, где i и j являются положительными целыми числами. Положение p(i,j) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
, соответствующей i-ои частице, где i и j являются положительными целыми числами. Положение p(i,j) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
[0056] Анимация частиц может представлять собой двухмерную плоскую анимацию или трехмерную пространственную анимацию. В случае двухмерной плоской анимации положение p(i,j) i-ой частицы в j-ом кадре изображения может быть представлено как координата положения (x(i,j), y(i, i)). В случае трехмерной пространственной анимации положение p(i,j) i-ой частицы в j-ом кадре изображения может быть представлено как координата положения (x(i,j), y(i,j), z(i,j)).
[0057] Необходимо отметить, что для любой из частиц ее исходное положение может являться заданной постоянной величиной. Например, координата положения, соответствующая исходному положению 1-ой частицы, может быть постоянной величиной (0,100). Или для любой частицы ее исходное положение может быть переменной величиной, выбранной в заданной области. Например, координата положения, соответствующая исходному положению 1-ой частицы, может быть переменной величиной, выбранной в заданной прямоугольной области, сформированной координатами положения (0,98), (0,102), (4,98) и (4,102). Метод выбора величины может быть методом произвольного выбора или методом порядкового выбора.
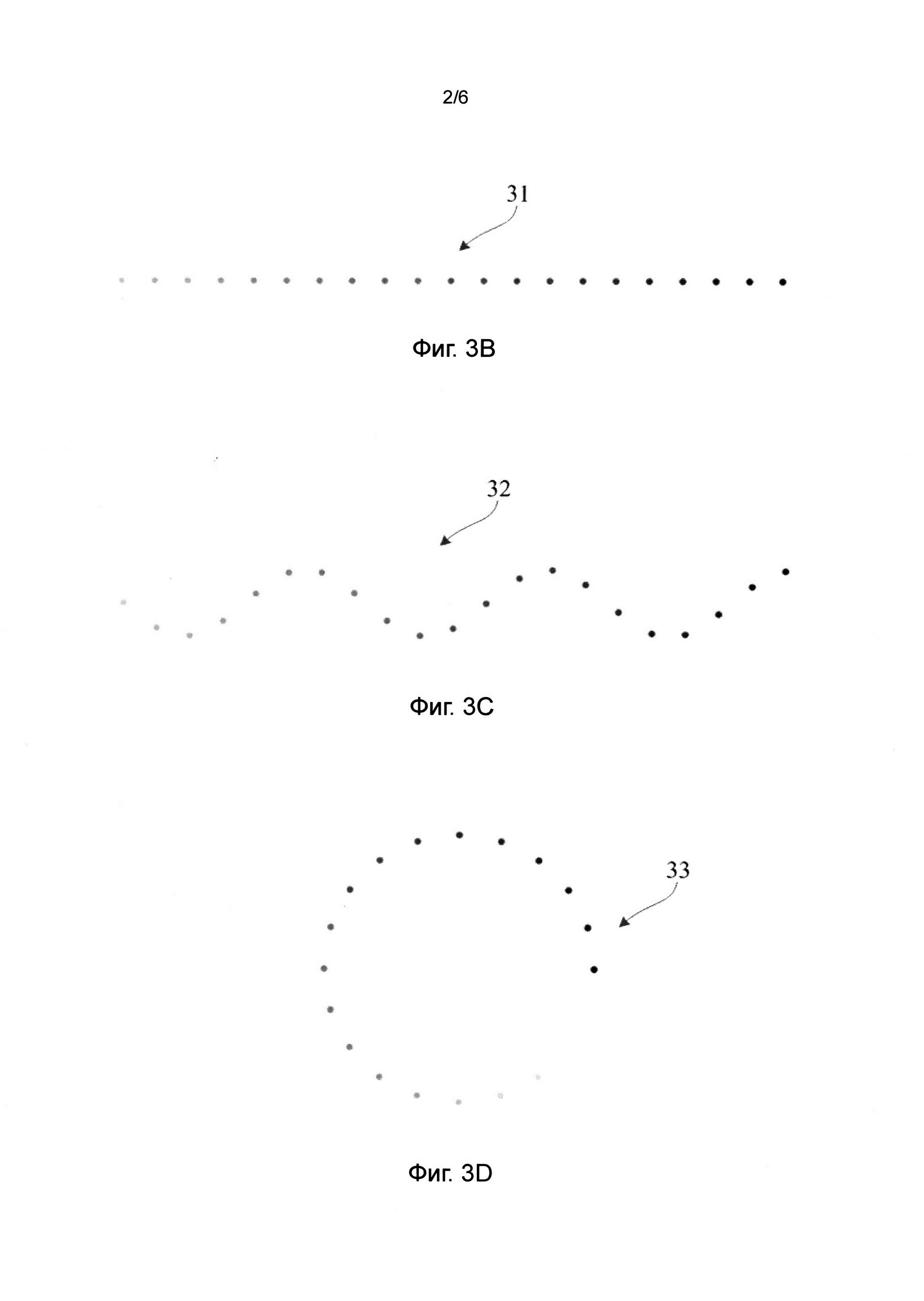
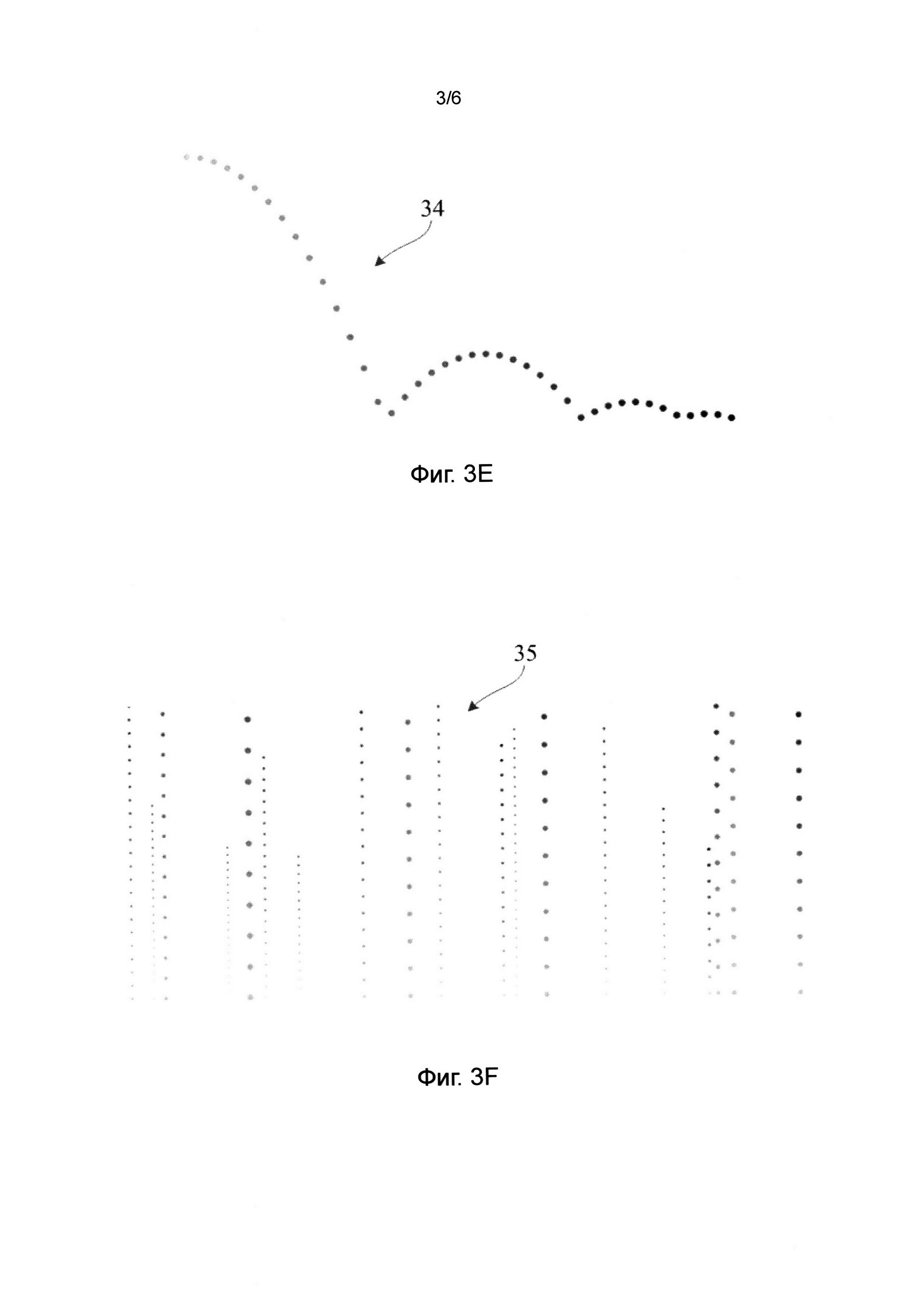
[0058] Или же, траектория движения, соответствующая функции траектории движения, может включать в себя, помимо прочего, траекторию прямолинейного движения, траекторию криволинейного движения, траекторию кругового движения и траекторию колебательного движения, либо любое их сочетание. Что касается фиг. 3В-3Е в их сочетании, на фиг. 3В показана схема, иллюстрирующая траекторию 31 прямолинейного движения одиночной частицы, на фиг. 3С показана схема, иллюстрирующая траекторию 32 криволинейного движения одиночной частицы, на фиг. 3D показана схема, иллюстрирующая траекторию 33 кругового движения одиночной частицы, на фиг. 3Е показана схема, иллюстрирующая траекторию 34 колебательного движения одиночной частицы.
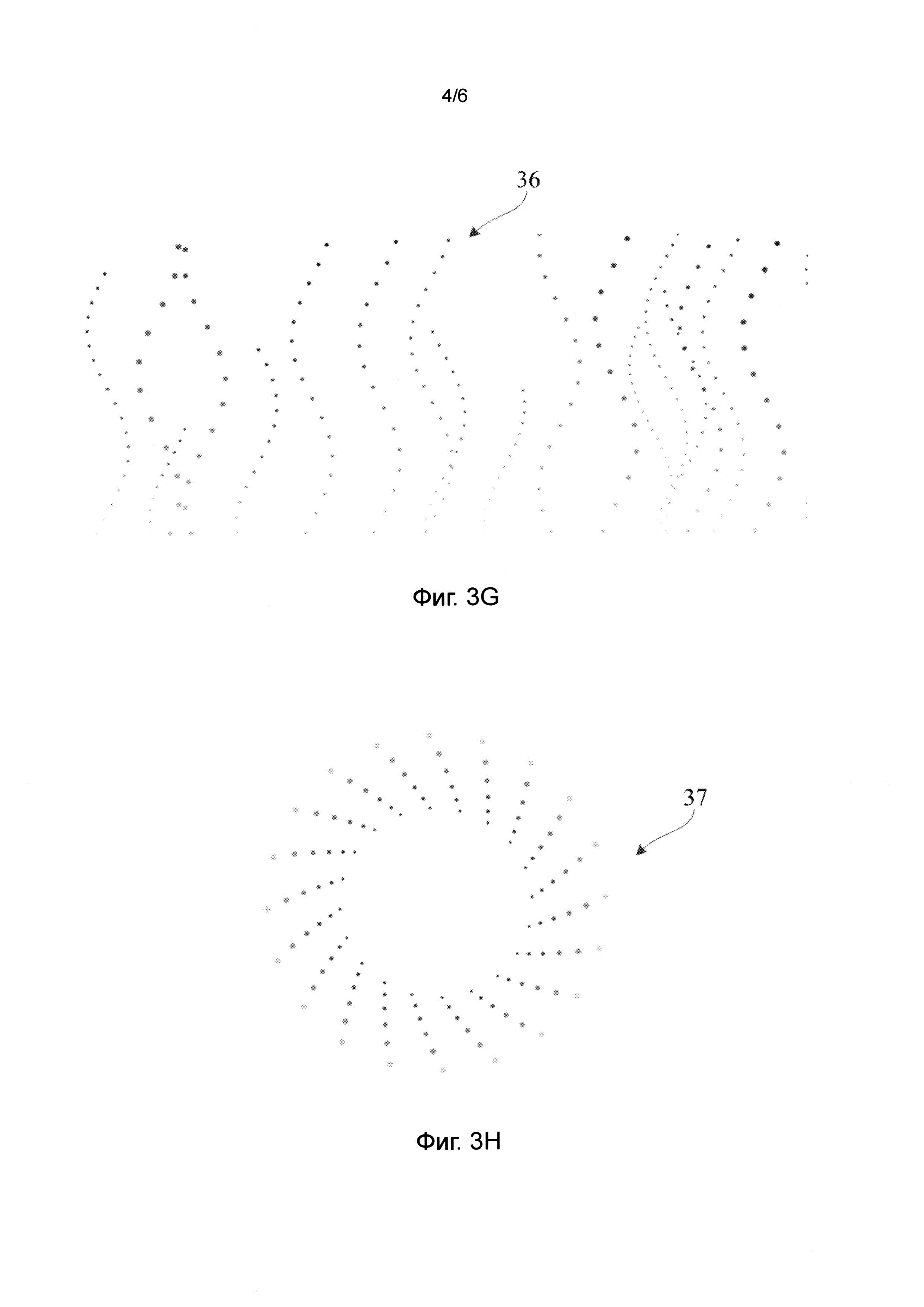
[0059] Упомянутые выше фиг. 3В-3Е иллюстрируют движение одиночной частицы. Модель анимации частиц может включать в себя информацию о траектории движения, соответствующей множеству частиц, соответственно, что создает крупномасштабное движение частиц. Что касается фиг. 3F-3H в их сочетании, на фиг. 3F показана схематическая диаграмма, иллюстрирующая траектории 35 прямолинейного движения множества частиц. Прямолинейное движение множества частиц может быть использовано для представления рабочего режима окончания приготовления риса в электроварке, чтобы отобразить действие водяного пара понятным и наглядным образом. На фиг. 3G показана схема, иллюстрирующая траектории 36 криволинейного движения множества частиц. Криволинейное движение множества частиц может быть использовано для представления рабочего режима очистки воды в водоочистителе, чтобы отобразить действие пузырьков понятным и наглядным образом. На фиг. 3Н показана схема, иллюстрирующая траектории 37 кругового движения множества частиц. Круговое движение множества частиц может быть использовано для представления рабочего режима воздухоочистителя или пылесоса, чтобы отобразить втягивание устройством воздуха понятным и наглядным образом. Разумеется, что на упомянутых выше фиг. 3F-3H различные частицы соответствуют одному и тому же типу траектории движения, в других возможных вариантах реализации различные частицы могут соответствовать различным типам траекторий движения, что создает многообразие анимации частиц.
[0060] В одном возможном варианте реализации для траектории прямолинейного движения может использоваться линейная функция. В примере с траекторией прямолинейного движения одиночной частицы по направлению оси х соответствующая функция траектории движения  может представлять собой: x(i,j+1)=x(i,j)+a x(i,1) может быть заданной величиной. Когда а является константой, функция описывает траекторию равномерного прямолинейного движения по направлению оси х; когда а является переменной, функция описывает траекторию неравномерного прямолинейного движения по направлению оси х. Траектория прямолинейного движения по направлению оси у и траектория прямолинейного движения по направлению оси z могут соотноситься с упомянутой выше траекторией прямолинейного движения по направлению оси х. Кроме того, траектория прямолинейного движения в направлении под углом в двумерной плоскости может быть сформирована при одновременном изменении координат положения на оси х и оси y. Траектория прямолинейного движения в трехмерном пространстве может быть сформирована при одновременном изменении координат положения на оси х, оси y и оси z.
может представлять собой: x(i,j+1)=x(i,j)+a x(i,1) может быть заданной величиной. Когда а является константой, функция описывает траекторию равномерного прямолинейного движения по направлению оси х; когда а является переменной, функция описывает траекторию неравномерного прямолинейного движения по направлению оси х. Траектория прямолинейного движения по направлению оси у и траектория прямолинейного движения по направлению оси z могут соотноситься с упомянутой выше траекторией прямолинейного движения по направлению оси х. Кроме того, траектория прямолинейного движения в направлении под углом в двумерной плоскости может быть сформирована при одновременном изменении координат положения на оси х и оси y. Траектория прямолинейного движения в трехмерном пространстве может быть сформирована при одновременном изменении координат положения на оси х, оси y и оси z.
[0061] В одном возможном варианте реализации для траектории криволинейного движения может использоваться тригонометрическая функция, такая как sin, cos, tan и другие, либо может использоваться степенная функция. В примере с траекторией криволинейного движения одиночной частицы на плоскости, образованной осью х и осью y, соответствующая функция траектории движения может представлять собой: x(i,j+1)=x(i,j)+a, y(i,j+1)=sin(x(i,j+1)). x(i,1) может быть заданной величиной, и а является константой или переменной.
[0062] В одном возможном варианте реализации, в примере с траекторией кругового движения одиночной частицы на плоскости, образованной осью х и осью y, соответствующая функция траектории движения может представлять собой:
angle(i,j+1)=angle(i,j)+a, radius=b;
x(i,j+1)=cos(angle(i,j+1))×radius; y(i,j+1)=sin (angle(i,j+1))×radius.
angle(i,j) представляет собой угол смещения i-ой частицы в j-ом кадре изображения относительно центра окружности, а обозначает переменное количество углов смещения в двух смежных кадрах, radius обозначает радиус, и angle(i,1) может быть заданной величиной. Траектория равномерного кругового движения может быть сформирована, когда а и b являются константами. Траектория движения по спирали может быть сформирована, когда b является переменной.
[0063] Разумеется, что перечисленные выше функции траектории движения приведены лишь в качестве примеров и пояснения и не используются для ограничения изобретения. Кроме того, в приведенном выше описании информация о траектории движения является функцией траектории движения в качестве примера. В других возможных вариантах реализации информация о траектории движения может быть заданным положением частицы в каждом кадре изображения или может быть случайным алгоритмом, используемым для определения положения частицы в каждом кадре изображения.
[0064] Кроме того, для одиночной частицы равномерное движение может быть получено, когда переменное количество положений в двух смежных кадрах является константой; неравномерное движение может быть получено, когда переменное количество положений в двух смежных кадрах является переменной. Например, равномерное прямолинейное движение может быть получено с помощью задания параметра а в функции траектории движения, соответствующей упомянутой выше траектории прямолинейного движения, в качестве константы; неравномерное прямолинейное движение может быть получено с помощью задания параметра а в качестве переменной. Например, равномерное круговое движение может быть получено с помощью задания параметров а и b в функции траектории движения, соответствующей упомянутой выше траектории кругового движения, в качестве константы; неравномерное круговое движение может быть получено с помощью задания параметра а в качестве константы и установки параметра b в качестве переменной.
[0065] На этапе 304 воспроизводится n кадров изображения для создания анимации частиц.
[0066] Устройство управления может воспроизводить n кадров изображения, отображая рабочий режим устройства с помощью анимации частиц.
[0067] Или же, когда модель анимации частиц может дополнительно включать в себя информацию о стиле отображения, соответствующем каждой частице в отдельности, до осуществления упомянутого выше этапа 304 способ дополнительно включает в себя: определение для каждой частицы стиля отображения в каждом из n кадров изображения в соответствии с информацией о стиле отображения, соответствующем частице; причем стиль отображения может включать в себя цвет, размер, форму и время отображения, либо любое их сочетание. Таким образом, модель анимации частиц может дополнительно включать в себя изменяющиеся состояния стиля отображения каждой частицы в дополнение к состояниям движения каждой частицы. Например, цвет частицы может постоянно изменяться во времени; в другом примере размер частицы может постоянно изменяться во времени; в другом примере время отображения различных частиц может быть разделено, и т.д.
[0068] В одном примере анимация частиц, определяемая моделью анимации частиц, может включать в себя множество частиц. Для каждой одиночной частицы такого множества, с одной стороны, частица движется согласно траектории движения, определяемой информацией о траектории движения. С другой стороны, частица изменяет свой стиль отображения в соответствии с информацией о стиле отображения. Например, она может менять цвет, масштаб, мерцание и т.п., чтобы отображать рабочий режим устройства более наглядно и реалистично, и чтобы пользователь мог быстро и точно определять рабочий режим устройства в соответствии с анимацией частиц, с помощью чего можно повысить эффективность взаимодействия человека с машиной.
[0069] Следует добавить, что для более рационального и эффективного использования ресурсов памяти, в настоящем варианте осуществления далее предлагается механизм повторного использования частицы. Для i-ой частицы после определения положения p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения можно выявить, находится ли положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения за пределами заданной области отображения, и p(i,j+1) может быть установлено в качестве исходного положения i-ой частицы, если положение p(i,j1+) i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения. А именно, положение частицы может быть установлено в качестве ее исходного положения, когда частица выходит за пределы своей соответствующей заданной области отображения, что позволяет использовать частицу повторно. Например, в случае анимации частиц, в которой большое количество частиц движется вверх от положения(-ий) ниже заданной области отображения, пользователь может увидеть, что бесконечное количество частиц постоянно появляется из положения(-ий) ниже заданной областью отображения и исчезает выше заданной областью отображения. Однако только ограниченное количество (например, двести) частиц необходимо сохранить. Когда любая из частиц переходит в верхнюю часть заданной области отображения, частица может быть использована повторно и размещена в исходном положении ниже заданной области отображения. Затем частица может снова двигаться снизу вверх, и таким образом повторное использование продолжается.
[0070] Кроме того, как описывалось выше, для любой из частиц ее исходное положение может являться заданной постоянной величиной или может быть переменной величиной, выбранной в заданной области. По этой причине 1-ая частица по-прежнему рассматривается в качестве примера. Если координата положения, соответствующая исходному положению 1-ой частицы, является постоянной величиной (0,100), то координата положения 1-ой частицы может быть переустановлена на постоянное значение (0,100) каждый раз, когда 1-ая частица выходит за пределы заданной области отображения. Если координата положения, соответствующая исходному положению 1-ой частицы, является переменной величиной, выбранной в заданной прямоугольной области, сформированной координатами положения (0,98), (0,102), (4,98) и (4,102), то координата положения 1-ой частицы может быть переустановлена на координату положения, выбранную в упомянутой выше заданной прямоугольной области каждый раз, когда 1-ая частица выходит за пределы заданной области отображения. Например, в случае метода произвольного выбора, координата положения 1-ой частицы может быть переустановлена на (2,99), когда 1-ая частица выходит за пределы заданной области отображения в первый раз; координата положения 1-ой частицы может быть переустановлена на (4,101), когда 1-ая частица выходит за пределы заданной области отображения во второй раз; координата положения 1-ой частицы может быть переустановлена на (1,100), когда 1-ая частица выходит за пределы заданной области отображения в третий раз, и т.д. Кроме того, когда метод выбора величины является методом порядкового выбора, переустановка координаты положения после того, как частица каждый раз выходит за пределы заданной области отображения, может быть определена в соответствии с заданным порядком выбора.
[0071] По сравнению с высвобождением частицы, когда частица выходит за пределы соответствующей заданной области отображения, и воссозданием частицы, при применении упомянутого выше механизма повторного использования частицы эффект анимации, при котором постоянно появляется бесконечное количество частиц, может быть получен всего лишь с ограниченным количеством частиц, которые требуется сохранить. Это поможет и существенно сократить задействованные ресурсы памяти, и избежать проблемы слишком высоких затрат на системные процессы, вызванных повторным высвобождением и созданием частицы. Кроме того, по сравнению с установкой исходного положения частицы в качестве постоянной величины, при установке исходного положения частицы в качестве переменной в заданной области отображения можно реализовать динамическое изменение деталей, исходя из сохранения общего динамического эффекта, представляемого анимацией частиц. Это может повысить четкость и яркость анимации частиц и более качественно отобразить рабочий режим устройства.
[0072] Нужно дополнительно добавить, что в одном возможном варианте реализации после упомянутого выше этапа 303 способ может дополнительно включать в себя следующие этапы: формирование для каждого кадра изображения линии, последовательно соединяющей m частиц, входящих в кадр изображения, где m является целым числом, которое больше или равно 2. Анимация, в которой линия выступает в качестве элемента, может быть реализована с помощью соединения множества частиц. Например, как показано совместно на фиг. 31, фиг. 31 представляет собой схему, иллюстрирующую кадр 38 изображения, в котором линия выступает в качестве элемента. Как показано на фиг. 31, волнистая кривая линия может быть сформирована соединением множества частиц, неоднократно движущихся вверх и вниз по прямой линии в вертикальном направлении для отображения эффекта водного потока или воздушного потока понятным и наглядным образом.
[0073] Необходимо дополнительно добавить, что одиночная частица может быть одиночной пиксельной точкой или может быть окружностью, треугольником, многоугольником, звездочкой или другой специфической формой, образованной некоторым количеством пиксельных точек, данный вариант осуществления не ограничивается контекстом.
[0074] В заключение необходимо отметить, что с помощью отображения рабочего режима устройства в виде анимации частиц, способ отображения рабочего режима устройства, предлагаемый в настоящем варианте осуществления, может решить проблему представления единичного отображения, вызванную изображением рабочего режима устройства в виде текста или пиктограммы в известном уровне техники, что позволит достичь технического эффекта отображения рабочего режима устройства более понятным и наглядным образом и поможет расширить взаимодействие между пользователем и устройством.
[0075] Кроме того, траектория движения частицы может быть определена в соответствии с функцией траектории движения. Поскольку функция траектории движения может иметь ряд регулировочных параметров, может быть достигнуто многообразие анимации частиц. Это может применяться для большего количества устройств и для отображения большего количества рабочих режимов устройства.
[0076] Кроме того, с помощью установки p(i,j+1) в качестве исходного положения i-ой частицы после выявления того, что положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения, может быть достигнуто повторное использование частицы. Таким образом, эффект анимации, при котором постоянно появляется бесконечное количество частиц, может быть получен всего лишь с ограниченным количеством частиц, которые требуется сохранить. Это поможет и существенно сократить задействованные ресурсы памяти, и избежать проблемы слишком высоких затрат на системные процессы, вызванных повторным высвобождением и созданием частицы.
[0077] Необходимо далее добавить, что в упомянутых выше вариантах осуществления приводится только пример отображения рабочего режима таких бытовых приборов, как кондиционер, электроварка, водоочиститель и т.п. с помощью анимации частиц. На практике рабочий режим других электроприборов также можно отобразить с помощью анимации частиц, настоящее изобретение не ограничивается контекстом.
[0078] Ниже представлены варианты осуществления устройства настоящего изобретения, которое может быть использовано для реализации вариантов осуществления способа настоящего изобретения. С подробностями, не описанными в вариантах осуществления устройства настоящего изобретения, можно ознакомиться в вариантах осуществления способа настоящего изобретения.
[0079] На фиг. 4 показана структурная блок-схема, иллюстрирующая устройство отображения рабочего режима устройства в соответствии с примером осуществления. Устройство может использоваться в бытовом приборе 120 в среде осуществления, показанной на фиг. 1, и также может использоваться в устройстве 140 управления, подключенном к бытовому прибору 120. Устройство может включать в себя: модуль 410 определения режима, модуль 420 получения модели и модуль 430 воспроизведения анимации.
[0080] Модуль 410 определения режима может быть выполнен с возможностью получения рабочего режима устройства.
[0081] Модуль 420 получения модели может быть выполнен с возможностью получения модели анимации частиц, соответствующей рабочему режиму, определенному модулем 410 определения режима.
[0082] Модуль 430 воспроизведения анимации может быть выполнен с возможностью определения, согласно модели анимации частиц, полученной модулем 420 получения модели, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведения, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц, где n≥2, и n является целым числом.
[0083] В заключение следует отметить, что с помощью отображения рабочего режима устройства в виде анимации частиц устройство, описанное в данном варианте осуществления, может решить проблему представления единичного отображения, вызванную изображением рабочего режима устройства в виде текста или пиктограммы в известном уровне техники, что позволит достичь технического эффекта отображения рабочего режима устройства более понятным и наглядным образом и поможет расширить взаимодействие между пользователем и устройством.
[0084] На фиг. 5 показана структурная блок-схема, иллюстрирующая устройство отображения рабочего режима устройства в соответствии с другим примером осуществления. Устройство может использоваться в бытовом приборе 120 в среде осуществления, показанной на фиг. 1, и также может использоваться в устройстве 140 управления, подключенном к бытовому прибору 120. Устройство может включать в себя: модуль 410 определения режима, модуль 420 получения модели и модуль 430 воспроизведения анимации.
[0085] Модуль 410 определения режима может быть выполнен с возможностью получения рабочего режима устройства.
[0086] Модуль 420 получения модели может быть выполнен с возможностью получения модели анимации частиц, соответствующей рабочему режиму, определенному модулем 410 определения режима.
[0087] Модуль 430 воспроизведения анимации может быть выполнен с возможностью определения, согласно модели анимации частиц, полученной модулем 420 получения модели, изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведения, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц, где n≥2, и n является целым числом.
[0088] Или же, модель анимации частиц может включать в себя информацию о траектории движения, соответствующей каждой частице в отдельности.
[0089] Соответственно, модуль 430 воспроизведения анимации может включать в себя субмодуль 430а определения положения и субмодуль 430b воспроизведения анимации.
[0090] Субмодуль 430а определения положения может быть выполнен с возможностью определения для каждой частицы положения в каждом из n кадров изображения в соответствии с информацией о траектории движения, соответствующей частице.
[0091] Субмодуль 430b воспроизведения анимации может быть выполнен с возможностью воспроизведения n кадров изображения для создания анимации частиц.
[0092] Соответственно, модуль воспроизведения анимации может дополнительно включать в себя субмодуль 430с выявления и субмодуль 430d установки.
[0093] Субмодуль 430с выявления может быть выполнен с возможностью выявления для i-ой частицы, находится ли положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения за пределами заданной области отображения, где i и j являются положительными целыми числами.
[0094] Субмодуль 430d установки может быть выполнен с возможностью установки p(i,j+1) в качестве исходного положения i-ой частицы, если положение i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения.
[0095] Или же, субмодуль 430а определения положения может быть выполнен с возможностью определения для i-ой частицы положения p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения в соответствии с положением p(i,j) i-ой частицы в j-ом кадре изображения и функцией траектории движения  , соответствующей i-ой частице, где i и j являются положительными целыми числами. Положение p(i,1) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
, соответствующей i-ой частице, где i и j являются положительными целыми числами. Положение p(i,1) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
[0096] Или же, траектория движения, соответствующая функции траектории движения , может включать в себя траекторию прямолинейного движения, траекторию криволинейного движения, траекторию кругового движения и траекторию колебательного движения, либо любое их сочетание.
[0097] Соответственно, модуль 430 воспроизведения анимации может дополнительно включать в себя субмодуль 430е определения стиля.
[0098] Субмодуль 430е определения стиля может быть выполнен с возможностью определения для каждой частицы стиля отображения в каждом из n кадров изображения в соответствии с информацией о стиле отображения, соответствующем частице. Стиль отображения может включать в себя цвет, размер, форму и время отображения, либо любое их сочетание.
[0099] Или же, модуль 430 воспроизведения анимации может дополнительно включать в себя субмодуль формирования линий (не показан).
[0100] Субмодуль формирования линий может быть выполнен с возможностью формирования для каждого кадра изображения линии, последовательно соединяющей m частиц, входящих в кадр изображения, где m является целым числом, которое больше или равно 2.
[0101] В заключение необходимо отметить, что с помощью отображения рабочего режима устройства в виде анимации частиц, устройство отображения рабочего режима устройства, описанное в вариантах осуществления настоящего изобретения, может решить проблему представления единичного отображения, вызванную изображением рабочего режима устройства в виде текста или пиктограммы в известном уровне техники, что позволит достичь технического эффекта отображения рабочего режима устройства более понятным и наглядным образом и поможет расширить взаимодействие между пользователем и устройством.
[0102] Кроме того, траектория движения частицы может быть определена в соответствии с функцией траектории движения. Поскольку функция траектории движения может иметь ряд регулировочных параметров, может быть достигнуто многообразие анимации частиц. Это может применяться для большего количества устройств и для отображения большего количества рабочих режимов устройства.
[0103] Кроме того, с помощью установки p(i,j+1) в качестве исходного положения i-ой частицы после выявления того, что положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения, может быть достигнуто повторное использование частицы. Таким образом, эффект анимации, при котором постоянно появляется бесконечное количество частиц, может быть получен всего лишь с ограниченным количеством частиц, которые требуется сохранить. Это поможет и существенно сократить задействованные ресурсы памяти, и избежать проблемы слишком высоких затрат на системные процессы, вызванных повторным высвобождением и созданием частицы.
[0104] Что касается устройств в приведенных выше вариантах осуществления, конкретные методики, по которым соответствующие модули выполняют операции, были подробно описаны в вариантах осуществления способов и здесь не конкретизируются.
[0105] Устройство отображения рабочего режима устройства далее описывается в примере осуществления настоящего изобретения. В устройстве может использоваться способ отображения рабочего режима устройства, предлагаемый настоящим изобретением. Устройство может включать в себя: процессор; и запоминающее устройство для хранения инструкций, выполняемых процессором. Процессор может быть выполнен с возможностью: определения рабочего режима устройства; получения модели анимации частиц, соответствующей рабочему режиму; и определения согласно модели анимации частиц изменяющихся состояний в n кадрах изображения по меньшей мере одной частицы, и воспроизведения, в соответствии с изменяющимися состояниями в n кадрах изображения по меньшей мере одной частицы, анимации частиц, где n≥2, и n является целым числом.
[0106] Или же, процессор может быть дополнительно выполнен с возможностью: выявления для i-ой частицы, находится ли положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения за пределами заданной области отображения, где i и j являются положительными целыми числами; и установки p(i,j+1) в качестве исходного положения i-ой частицы, если положение p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения находится за пределами заданной области отображения.
[0107] Или же, процессор может быть выполнен с возможностью: определения для i-ой частицы положения p(i,j+1) i-ой частицы в (j+1)-ом кадре изображения в соответствии с положением p(i,j) i-ой частицы в j-ом кадре изображения и функцией траектории движения , соответствующей i-ой частице, где i и j являются положительными целыми числами. Положение p(i,j) i-ой частицы в 1-ом кадре изображения является исходным положением i-ой частицы.
[0108] Или же, траектория движения, соответствующая функции траектории движения , может включать в себя траекторию прямолинейного движения, траекторию криволинейного движения, траекторию кругового движения и траекторию колебательного движения, либо любое их сочетание.
[0109] Или же, модель анимации частиц может далее включать в себя информацию о стиле отображения, соответствующем каждой частице в отдельности.
[0110] Соответственно, процессор может быть дополнительно выполнен с возможностью: определения для каждой частицы стиля отображения в каждом из n кадров изображения в соответствии с информацией о стиле отображения, соответствующем частице. Стиль отображения может включать в себя цвет, размер, форму и время отображения, либо любое их сочетание.
[0111] Или же, процессор может быть далее выполнен с возможностью: формирования для каждого кадра изображения линии, последовательно соединяющей m частиц, входящих в кадр изображения, где m является целым числом, которое больше или равно 2.
[0112] На фиг. 6 показана блок-схема устройства 600 в соответствии с примером осуществления. Например, устройство 600 может быть бытовым прибором, таким как кондиционер, холодильник, стиральная машина, водонагреватель, электроварка, воздухоочиститель, водоочиститель и т.п. Или устройство 600 может также быть устройством управления для управления включением и выключением бытового прибора и рабочим режимом бытового прибора. Устройство управления может быть мобильным терминалом, таким как пульт дистанционного управления, мобильный телефон, планшет и т.п.
[0113] Как показано на фиг. 6, устройство 600 может включать в себя один или более следующих компонентов: блок 602 обработки, запоминающее устройство 604, блок 606 питания, мультимедийный блок 608, аудио блок 610, интерфейс 612 ввода/вывода, сенсорный блок 614 и блок 616 связи.
[0114] Блок 602 обработки, как правило, управляет всеми операциями устройства 600, такими как операции, связанные с отображением, телефонными звонками, передачей данных, операции с камерой и операции записи. Блок 602 обработки может включать в себя один или более процессоров 620 для выполнения инструкций по осуществлению всех или части этапов из описанных выше способов. Кроме того, блок 602 обработки может включать в себя один или более модулей для обеспечения взаимодействия между блоком 602 обработки и другими компонентами. Например, блок 602 обработки может включать в себя мультимедийный модуль для обеспечения взаимодействия между мультимедийным блоком 608 и блоком 602 обработки.
[0115] Запоминающее устройство 604 выполнено с возможностью хранения различных видов данных для обеспечения работы устройства 600. Примеры таких данных включают в себя инструкции для прикладных программ либо способов, осуществляемых устройством 600, контактные данные, данные телефонной книги, сообщения, фотографии, видео и т.д. Запоминающее устройство 604 может быть реализовано с помощью энергозависимых или энергонезависимых запоминающих устройств любого типа или их сочетания, например, статическое запоминающее устройство с произвольной выборкой (SRAM), электрически стираемое программируемое запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[0116] Блок 606 питания обеспечивает питанием различные компоненты устройства 600. Блок 606 питания может включать в себя систему управления питанием, один или более источников электропитания и прочие компоненты, связанные с выработкой, управлением и распределением электропитания устройства 600.
[0117] Мультимедийный блок 608 включает в себя экран, обеспечивающий выходной интерфейс между устройством 600 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран можно реализовать в виде сенсорного экрана, чтобы принимать входные сигналы от пользователя. Сенсорная панель включает в себя один или более сенсорных датчиков для восприятия прикосновений, скольжений и жестов на сенсорной панели. Сенсорные датчики могут не только воспринимать границу касания и скольжения, но также распознавать период времени и нажатие, связанные с касанием или скольжением. В некоторых вариантах осуществления, мультимедийный блок 608 включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и задняя камера могут принимать внешние мультимедийные данные, когда устройство 600 находится в рабочем режиме, например, в режиме фотографирования или режиме видеосъемки. Как передняя камера, так и задняя камера могут быть системой фиксированных оптических линз или иметь функции фокусного и оптического масштабирования.
[0118] Аудио блок 610 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, аудио блок 610 включает в себя микрофон («М1С»), выполненный с возможностью принимать внешний звуковой сигнал, когда устройство 800 находится в рабочем режиме, таком как режим вызова, режим записи и режим распознавания речи. Принятый аудиосигнал может быть далее сохранен в запоминающем устройстве 604 или передан через блок 616 связи. В некоторых вариантах осуществления аудио блок 610 дополнительно включает в себя динамик для вывода аудиосигналов.
[0119] Интерфейс 612 ввода-вывода служит интерфейсом между блоком 602 обработки и периферийными интерфейсными модулями, такими как клавиатура, колесо прокрутки, кнопки и т.п. Кнопки могут включать в себя, но не ограничивать, кнопку возврата в начало, кнопку регулирования громкости, кнопку «Пуск», и кнопку блокировки.
[0120] Сенсорный блок 614 включает в себя один или более датчиков для оценки состояния различных аспектов устройства 600. Например, сенсорный блок 614 может определять состояние включения/выключения устройства 600, относительное положение компонентов (например, дисплея и клавиатуры устройства 600), изменение положения устройства 600 или компонента устройства 600, наличие или отсутствие контакта пользователя с устройством 600, ориентацию или ускорение/замедление устройства 600, и изменение температуры устройства 600. Сенсорный блок 614 может включать в себя датчик приближения, способный обнаруживать присутствие объекта в непосредственной близости без физического контакта. Сенсорный блок 614 может также включать в себя оптический датчик, например, датчик изображений CMOS или CCD, для использования в приложениях, работающих с изображениями. В некоторых вариантах осуществления сенсорный блок 614 может также включать в себя датчик ускорения, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
[0121] Блок 616 связи выполнен с возможностью обеспечения проводной или беспроводной связи между устройством 600 и другими устройствами. Устройство 600 может иметь доступ к беспроводной сети связи на основе стандарта связи, например WiFi, 2G или 3G, либо их сочетании. В одном примере осуществления блок 616 связи принимает широковещательный сигнал или соответственную широковещательную информацию от внешних широковещательных систем управления по широковещательному каналу. В одном примере осуществления блок 616 связи дополнительно включает в себя модуль радиосвязи на коротком расстоянии (NFC) для обеспечения связи ближнего действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной/ВЧ идентификации (RFID), технологии ассоциации ИК техники передачи данных (IrDA), сверхширокополосной технологии (UWB), технологии Bluetooth (ВТ) и других технологий.
[0122] В примерах осуществления устройство 600 может быть реализовано с помощью одной или более специализированных микросхем (ASIC), цифровых сигнальных процессоров (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), матриц программируемых логических вентилей (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для выполнения выше указанных способов.
[0123] В примерах осуществления также предлагается машиночитаемая среда долговременного хранения, например запоминающее устройство 604 с записанными инструкциями, исполняемые процессором 620 в устройстве 600 для осуществления описанных выше способов. Например, машиночитаемая среда долговременного хранения может быть постоянным запоминающим устройством (ROM), оперативным запоминающим устройством (RAM), компакт-диском CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных и т.п.
[0124] В машиночитаемой среде долговременного хранения данных хранятся инструкции, которые при их выполнении процессором устройства 600 вызывают осуществление устройством 600 способа, описанного выше в вариантах осуществления, представленных на фиг. 2 или фиг. 3А.
[0125] Другие варианты осуществления изобретения будут очевидны для специалистов в данной области техники при рассмотрении настоящего описания и применении раскрытого здесь изобретения. Подразумевается, что в сферу действия настоящей заявки включены любые варианты, способы использования либо изменения предлагаемого изобретения в соответствии с его основными принципами, включая отступления от настоящего описания согласно известной или общепринятой практике, применяемой в данной области техники. Предполагается, что описание и примеры даны здесь исключительно в качестве примеров, при этом действительный объем и сущность изобретения указаны в следующих пунктах формулы изобретения.
[0126] Необходимо принять во внимание, что настоящее изобретение не ограничивается конкретной конструкцией, которая была описана выше и проиллюстрирована в сопроводительных чертежах, и что в него могут быть внесены различные модификации и изменения без выхода за границы объема настоящего изобретения. Предполагается, что объем настоящего изобретения должен ограничиваться только прилагаемой формулой изобретения.
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта

