Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО НАВИГАЦИИ
Вид РИД
Изобретение
Перекрестная ссылка на родственные заявки
[0001] Это заявка основана и по ней испрашивается приоритет по заявке на патент Китая № 201510634512.8, поданной 29 сентября 2015 года, содержание которой полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее раскрытие относится к области техники навигации и, в частности, к способу и устройству навигации.
Уровень техники
[0003] В настоящее время вместе с быстрым развитием городской модернизации такие места, как торговые центры, становятся более крупными, и пользователи не могут быстро найти свои адреса назначения только лишь на основе указательных знаков или карт. Тем самым, чтобы облегчить для пользователей возможность быстро находить адреса назначения, срочно требуется способ навигации.
[0004] В уровне техники для навигации вне помещения навигация в значительной степени выполняется с помощью карт и информации о местоположении; в то время как для навигации внутри помещения, в целом, заранее вручную устанавливается инфракрасный датчик, затем посредством предварительно установленного инфракрасного датчика может быть определена позиция, в которой пользователь находится в настоящее время, после этого на основе начальной позиции и конечной позиции пользователя определяется путь навигации, и, наконец, навигация выполняется на основе позиции, в которой пользователь находится в настоящее время, и пути навигации.
Сущность изобретения
[0005] Чтобы преодолеть проблемы уровня техники, настоящее раскрытие обеспечивает способ и устройство навигации.
[0006] В соответствии с первым аспектом вариантов осуществления настоящего раскрытия обеспечен способ навигации, включающий в себя:
[0007] прием информации начальной точки и информации конечной точки, отправленной целевым устройством;
[0008] сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки; и
[0009] отправку видеоданных навигации по целевому пути целевому устройству.
[0010] В сочетании с первым аспектом в первом возможном методе реализации упомянутого выше первого аспекта сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[0011] сбор видеоданных навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки, информация начальной точки включает в себя информацию позиции начальной точки, и информация конечной точки включает в себя информацию позиции конечной точки.
[0012] В сочетании с первым возможным методом реализации в первом аспекте во втором возможном методе реализации упомянутого выше первого аспекта информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[0013] сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки включает в себя:
[0014] извлечение опорной информации начальной точки из изображения окружения начальной точки и извлечение опорной информации конечной точки из изображения окружения конечной точки;
[0015] определение опорной информации начальной точки как информации позиции начальной точки и определение опорной информации конечной точки как информации позиции конечной точки; и
[0016] сбор видеоданных навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки.
[0017] В сочетании с первым возможным методом реализации в первом аспекте в третьем возможном методе реализации упомянутого выше первого аспекта информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[0018] сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки включает в себя:
[0019] извлечение текстовой информации начальной точки из изображения окружения начальной точки и извлечение текстовой информации конечной точки из изображения окружения конечной точки;
[0020] определение текстовой информации начальной точки как информации позиции начальной точки и определение текстовой информации конечной точки как информации позиции конечной точки; и
[0021] сбор видеоданных навигации по целевому пути на основе текстовой информации начальной точки и текстовой информации конечной точки.
[0022] В сочетании с первым аспектом в четвертом возможном методе реализации упомянутого выше первого аспекта сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[0023] выделение видеоданных навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[0024] В сочетании с первым аспектом в пятом возможном методе реализации упомянутого выше первого аспекта сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[0025] сбор видеоданных навигации по целевому пути из множества сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[0026] В сочетании с любым возможным методом реализации в первом аспекте до пятого возможного метода реализации в первом аспекте в шестом возможном методе реализации упомянутого выше первого аспекта перед сбором видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки способ дополнительно включает в себя:
[0027] сбор видеоданных навигации по потенциальному пути.
[0028] В сочетании с шестым возможным методом реализации в первом аспекте в седьмом возможном методе реализации упомянутого выше первого аспекта сбор видеоданных навигации по потенциальному пути включает в себя:
[0029] сбор мобильных видеоданных и информации позиции, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[0030] привязку информации позиции к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути.
[0031] В сочетании с седьмым возможным методом реализации в первом аспекте в восьмом возможном методе реализации упомянутого выше первого аспекта информация позиции включает в себя опорную информацию или текстовую информацию.
[0032] В сочетании с первым аспектом в девятом возможном методе реализации упомянутого выше первого аспекта после отправки видеоданных навигации по целевому пути целевому устройству способ дополнительно включает в себя:
[0033] прием запроса перепланирования пути, отправленного целевым устройством;
[0034] сбор новых видеоданных навигации по целевому пути на основе запроса перепланирования пути; и
[0035] отправку новых видеоданных навигации по целевому пути целевому устройству, в результате чего целевое устройство выполняет навигацию на основе новых видеоданных навигации по целевому пути.
[0036] В соответствии со вторым аспектом вариантов осуществления настоящего раскрытия обеспечен способ навигации, включающий в себя:
[0037] сбор информации начальной точки и информации конечной точки;
[0038] отправку информации начальной точки и информации конечной точки к серверу;
[0039] прием видеоданных навигации по целевому пути от начальной точки до конечной точки, отправленных сервером, видеоданные навигации по целевому пути собраны сервером на основе информации начальной точки и информации конечной точки; и
[0040] в ответ на принятую операцию инициирования навигации широковещательную передачу видеоданных навигации по целевому пути.
[0041] В сочетании со вторым аспектом в первом возможном методе реализации упомянутого выше второго аспекта информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[0042] сбор информации начальной точки и информации конечной точки включает в себя:
[0043] сбор данных изображения окружения начальной точки и изображения окружения конечной точки при приеме команды навигации.
[0044] В сочетании со вторым аспектом во втором возможном методе реализации упомянутого выше второго аспекта широковещательная передача видеоданных навигации по целевому пути включает в себя:
[0045] обнаружение текущей скорости перемещения; и
[0046] широковещательную передачу видеоданных навигации по целевому пути на основе скорости перемещения, в результате чего скорость широковещательной передачи видеоданных навигации по целевому пути равна скорости перемещения.
[0047] В сочетании со вторым аспектом в третьем возможном методе реализации упомянутого выше второго аспекта широковещательная передача видеоданных навигации по целевому пути включает в себя:
[0048] отображение информации запроса подтверждения маршрута, когда широковещательно передается позиция целевого изображения в видеоданных навигации по целевому пути, информация запроса подтверждения маршрута выполнена с возможностью предлагать пользователю подтвердить, происходит ли отклонение от целевого пути; и
[0049] Отправку запроса перепланирования маршрута на сервер при приеме команды перепланирования маршрута на основе информации запроса подтверждения маршрута, в результате чего сервер собирает новые видеоданные навигации по целевому пути на основе запроса перепланирования маршрута.
[0050] В сочетании со вторым аспектом до третьего возможного метода реализации второго аспекта в четвертом возможном методе реализации упомянутого выше второго аспекта способ дополнительно включает в себя:
[0051] сбор мобильных видеоданных и информации позиции; и
[0052] отправку мобильных видеоданных и информации позиции на сервер, в результате чего сервер привязывает мобильные видеоданные к целевому изображению, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных.
[0053] В сочетании со вторым аспектом до третьего возможного метода реализации второго аспекта в пятом возможном методе реализации упомянутого выше второго аспекта способ дополнительно включает в себя:
[0054] сбор мобильных видеоданных и информации позиции;
[0055] привязку мобильных видеоданных к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[0056] отправку видеоданных навигации по потенциальному пути на сервер.
[0057] В соответствии с третьим аспектом вариантов осуществления настоящего раскрытия обеспечено навигационное устройство, включающее в себя:
[0058] первый модуль приема, выполненный с возможностью принимать информацию начальной точки и информацию конечной точки, отправленную целевым устройством;
[0059] первый модуль сбора данных, выполненный с возможностью собирать видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, принятой первым модулем приема; и
[0060] первый модуль отправки, выполненный с возможностью отправлять видеоданные навигации по целевому пути, собранные первым модулем сбора данных, целевому устройству.
[0061] В сочетании с третьим аспектом в первом возможном методе реализации упомянутого выше третьего аспекта первый модуль сбора данных включает в себя:
[0062] первый блок сбора данных, выполненный с возможностью собирать видеоданные навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки, информация начальной точки включает в себя информацию позиции начальной точки, и информация конечной точки включает в себя информацию позиции конечной точки.
[0063] В сочетании с первым возможным методом реализации в третьем аспекте во втором возможном методе реализации упомянутого выше третьего аспекта информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[0064] первый блок сбора данных включает в себя:
[0065] первый подблок извлечения, выполненный с возможностью извлекать опорную информацию начальной точки из изображения окружения начальной точки и извлекать опорную информацию конечной точки из изображения окружения конечной точки;
[0066] первый подблок определения, выполненный с возможностью определять опорную информацию начальной точки, извлеченную первым подблоком извлечения, как информацию позиции начальной точки и определять опорную информацию конечной точки, извлеченную первым подблоком извлечения, как информацию позиции конечной точки; и
[0067] первый подблок сбора данных, выполненный с возможностью собирать видеоданные навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки, определенной первым подблоком определения.
[0068] В сочетании с первым возможным методом реализации в третьем аспекте в третьем возможном методе реализации упомянутого выше третьего аспекта информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[0069] первый блок сбора данных включает в себя:
[0070] второй подблок извлечения, выполненный с возможностью извлекать текстовую информацию начальной точки из изображения окружения начальной точки и извлекать текстовую информацию конечной точки из изображения окружения конечной точки;
[0071] второй подблок определения, выполненный с возможностью определять текстовую информацию начальной точки, извлеченную вторым подблоком извлечения, как информацию позиции начальной точки, и определить текстовую информацию конечной точки, извлеченную вторым подблоком извлечения, как информацию позиции конечной точки; и
[0072] второй подблок сбора, выполненный с возможностью собирать видеоданные навигации по целевому пути на основе текстовой информации начальной точки и текстовой информации конечной точки, определенной вторым подблоком определения.
[0073] В сочетании с третьим аспектом в четвертом возможном методе реализации упомянутого выше третьего аспекта первый модуль сбора данных включает в себя:
[0074] блок выделения, выполненный с возможностью выделять видеоданные навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[0075] В сочетании с третьим аспектом в пятом возможном методе реализации упомянутого выше третьего аспекта первый модуль сбора данных включает в себя:
[0076] второй блок сбора данных, выполненный с возможностью собирать видеоданные навигации по целевому пути из множества сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[0077] В сочетании с любым возможным методом реализации в третьем аспекте до пятого возможного метода реализации в третьем аспекте в шестом возможном методе реализации упомянутого выше третьего аспекта устройство дополнительно включает в себя:
[0078] второй модуль сбора данных, выполненный с возможностью собирать видеоданные навигации по потенциальному пути.
[0079] В сочетании с шестым возможным методом реализации в третьем аспекте в седьмом возможном методе реализации упомянутого выше третьего аспекта второй модуль сбора данных включает в себя:
[0080] третий блок сбора данных, выполненный с возможностью собирать мобильные видеоданные и информацию позиции, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[0081] блок привязки, выполненный с возможностью привязывать информацию позиции, собранную третьим блоком сбора данных, с целевым изображением, чтобы получить видеоданные навигации по потенциальному пути.
[0082] В сочетании с седьмым возможным методом реализации в третьем аспекте в восьмом возможном методе реализации упомянутого выше третьего аспекта информация позиции включает в себя опорную информацию или текстовую информацию.
[0083] В сочетании с третьим аспектом в девятом возможном методе реализации упомянутого выше третьего аспекта устройство дополнительно включает в себя:
[0084] второй модуль приема, выполненный с возможностью принимать запрос перепланирования пути, отправленный целевым устройством;
[0085] третий модуль сбора данных, выполненный с возможностью собирать новые видеоданные навигации по целевому пути на основе запроса перепланирования пути, принятого вторым модулем приема; и
[0086] второй модуль отправки, выполненный с возможностью отправлять новые видеоданные навигации по целевому пути, собранные третьим модулем сбора данных, целевому устройству, в результате чего целевого устройство выполняет навигацию на основе новых видеоданных навигации по целевому пути.
[0087] В соответствии с четвертым аспектом вариантов осуществления настоящего раскрытия обеспечено навигационное устройство, включающее в себя:
[0088] первый модуль сбора данных, выполненный с возможностью собирать информацию начальной точки и информацию конечной точки;
[0089] первый модуль отправки, выполненный с возможностью отправлять информацию начальной точки и информацию конечной точки, собранную первым модулем сбора данных, на сервер;
[0090] модуль приема, выполненный с возможностью принимать видеоданные навигации по целевому пути от начальной точки до конечной точки, отправленные сервером, видеоданные навигации по целевому пути собраны сервером на основе информации начальной точки и информации конечной точки, отправленной первым модулем отправки; и
[0091] модуль широковещательной передачи, выполненный с возможностью в ответ на принятую операцию по инициированию навигации широковещательно передавать видеоданные навигации по целевому пути, принятые модулем приема.
[0092] В сочетании с четвертым аспектом в первом возможном методе реализации упомянутого выше четвертого аспекта информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[0093] первый модуль сбора данных включает в себя:
[0094] блок сбора данных, выполненный с возможностью принимать команду навигации, собирать данные изображения окружения начальной точки и изображения окружения конечной точки.
[0095] В сочетании с четвертым аспектом во втором возможном методе реализации упомянутого выше четвертого аспекта модуль широковещательной передачи включает в себя:
[0096] блок обнаружения, выполненный с возможностью обнаруживать текущую скорость перемещения; и
[0097] блок широковещательной передачи, выполненный с возможностью широковещательно передавать видеоданные навигации по целевому пути на основе скорости перемещения, обнаруженной блоком обнаружения, в результате чего скорость широковещательной передачи видеоданных навигации по целевому пути равна скорости перемещения.
[0098] В сочетании с четвертым аспектом в третьем возможном методе реализации упомянутого выше четвертого аспекта модуль широковещательной передачи включает в себя:
[0099] блок отображения, выполненный с возможностью отображать информацию запроса подтверждения маршрута, когда широковещательно передается позиция целевого изображения в видеоданных навигации по целевому пути, информация запроса подтверждения маршрута выполнена с возможностью предлагать пользователю подтвердить, происходит ли отклонение от целевого пути; и
[00100] блок отправки, выполненный с возможностью при приеме команды перепланирования маршрута на основе информации запроса подтверждения маршрута, отображенной блоком отображения, отправлять запрос перепланирования маршрута на сервер, в результате чего сервер собирает новые видеоданные навигации по целевому пути на основе запроса перепланирования маршрута.
[00101] В сочетании с любым возможным методом реализации в четвертом аспекте до третьего возможного метода реализации в четвертом аспекте в четвертом возможном методе реализации упомянутого выше четвертого аспекта устройство дополнительно включает в себя:
[00102] второй модуль сбора данных, выполненный с возможностью собирать мобильные видеоданные и информацию позиции; и
[00103] второй модуль отправки, выполненный с возможностью отправлять мобильные видеоданные и информацию позиции, собранные вторым модулем сбора данных, на сервер, в результате чего сервер привязывает мобильные видеоданные к целевому изображению, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному в стационарном состоянии во время захвата мобильных видеоданных.
[00104] В сочетании с любым возможным методом реализации в четвертом аспекте до третьего возможного метода реализации в четвертом аспекте в пятом возможном методе реализации упомянутого выше четвертого аспекта устройство дополнительно включает в себя:
[00105] третий модуль сбора данных, выполненный с возможностью собирать мобильные видеоданные и информацию позиции;
[00106] модуль привязки, выполненный с возможностью привязывать мобильные видеоданные, собранные третьим модулем сбора данных, к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному в стационарном состоянии во время захвата мобильных видеоданных; и
[00107] третий модуль отправки, выполненный с возможностью отправлять видеоданные навигации по потенциальному пути, полученные посредством привязки модулем привязки, на сервер.
[00108] В соответствии с пятым аспектом вариантов осуществления настоящего раскрытия обеспечено навигационное устройство, включающее в себя:
[00109] процессор; и
[00110] память для хранения команд, исполняемых процессором;
[00111] причем процессор выполнен с возможностью:
[00112] принимать информацию начальной точки и информацию конечной точки, отправленную целевым устройством;
[00113] собирать видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки; и
[00114] отправлять видеоданные навигации по целевому пути целевому устройству.
[00115] В соответствии с шестым аспектом вариантов осуществления настоящего раскрытия обеспечено навигационное устройство, включающее в себя:
[00116] процессор; и
[00117] память для хранения команд, исполняемых процессором;
[00118] причем процессор выполнен с возможностью:
[00119] собирать информацию начальной точки и информацию конечной точки;
[00120] отправлять информацию начальной точки и информацию конечной точки на сервер;
[00121] принимать видеоданные навигации по целевому пути от начальной точки до конечной точки, отправленные сервером, видеоданные навигации по целевому пути собраны сервером на основе информации начальной точки и информации конечной точки; и
[00122] в ответ на принятую операцию инициирования навигации широковещательно передавать видеоданные навигации по целевому пути.
[00123] Технические решения, предоставленные вариантами осуществления настоящего раскрытия, могут иметь следующие благоприятные эффекты: в вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, навигация может быть выполнена более интуитивно, понижается порог навигации, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00124] Следует понимать, что приведенное выше общее описание и последующее подробное описание являются только иллюстративными и пояснительными и не ограничивают изобретение.
Краткое описание чертежей
[00125] Прилагаемые чертежи, которые включены в это описание и составляют его часть, иллюстрируют варианты осуществления, совместимые с изобретением, и вместе с описанием служат для того, чтобы разъяснить принципы изобретения.
[00126] Фиг. 1 - блок-схема последовательности операций способа навигации в соответствии с иллюстративным вариантом осуществления.
[00127] Фиг. 2 - блок-схема последовательности операций способа навигации в соответствии с иллюстративным вариантом осуществления.
[00128] Фиг. 3 - блок-схема последовательности операций способа навигации в соответствии с иллюстративным вариантом осуществления.
[00129] Фиг. 4 - блок-схема навигационного устройства, в соответствии с иллюстративным вариантом осуществления.
[00130] Фиг. 5 - блок-схема первого модуля сбора данных в соответствии с иллюстративным вариантом осуществления.
[00131] Фиг. 6 - блок-схема первого блока сбора данных в соответствии с иллюстративным вариантом осуществления.
[00132] Фиг. 7 - блок-схема первого блока сбора данных в соответствии с иллюстративным вариантом осуществления.
[00133] Фиг. 8 - блок-схема первого модуля сбора данных в соответствии с иллюстративным вариантом осуществления.
[00134] Фиг. 9 - блок-схема первого модуля сбора данных в соответствии с иллюстративным вариантом осуществления.
[00135] Фиг. 10 - блок-схема навигационного устройства в соответствии с иллюстративным вариантом осуществления.
[00136] Фиг. 11 - блок-схема второго модуля сбора данных в соответствии с иллюстративным вариантом осуществления.
[00137] Фиг. 12 - блок-схема навигационного устройства в соответствии с иллюстративным вариантом осуществления.
[00138] Фиг. 13 - блок-схема навигационного устройства в соответствии с иллюстративным вариантом осуществления.
[00139] Фиг. 14 - блок-схема первого модуля сбора данных в соответствии с иллюстративным вариантом осуществления.
[00140] Фиг. 15 - блок-схема модуля широковещательной передачи в соответствии с иллюстративным вариантом осуществления.
[00141] Фиг. 16 - блок-схема модуля широковещательной передачи в соответствии с иллюстративным вариантом осуществления.
[00142] Фиг. 17 - блок-схема навигационного устройства в соответствии с иллюстративным вариантом осуществления.
[00143] Фиг. 18 - блок-схема навигационного устройства в соответствии с иллюстративным вариантом осуществления.
[00144] Фиг. 19 - блок-схема устройства для навигации в соответствии с иллюстративным вариантом осуществления.
[00145] Фиг. 20 - блок-схема устройства для навигации в соответствии с иллюстративным вариантом осуществления.
Осуществление изобретения
[00146] Далее будут подробно описаны иллюстративные варианты осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Последующее описание относится к прилагаемым чертежам, на которых одинаковые номера на разных чертежах представляют одинаковые или подобные элементы, если не указано иначе. Реализации, изложенные в последующем описании иллюстративных вариантов осуществления, не представляют все реализации, совместимые с изобретением. Вместо этого они являются лишь примерами совместимые с аспектами относящихся к изобретению устройств и способов, описанных в приложенной формуле изобретения.
[00147] Фиг. 1 является блок-схемой последовательности операций способа навигации в соответствии с иллюстративным вариантом осуществления. Как показано на фиг. 1, способ навигации используется на сервере и включает в себя следующие этапы.
[00148] На этапе 101 принимается информация начальной точки и информация конечной точки, отправленная целевым устройством.
[00149] На этапе 102 собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки.
[00150] На этапе 103 видеоданные навигации по целевому пути отправляются целевому устройству.
[00151] В вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, навигация может быть выполнена более интуитивно, понижается порог навигации, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00152] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[00153] сбор видеоданных навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки, информация начальной точки включает в себя информацию позиции начальной точки, и информация конечной точки включает в себя информацию позиции конечной точки.
[00154] В другом варианте осуществления настоящего раскрытия информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00155] сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки включает в себя:
[00156] извлечение опорной информации начальной точки из изображения окружения начальной точки и извлечение опорной информации конечной точки из изображения окружения конечной точки;
[00157] определение опорной информации начальной точки как информации позиции начальной точки и определение опорной информации конечной точки как информации позиции конечной точки; и
[00158] сбор видеоданных навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки.
[00159] В другом варианте осуществления настоящего раскрытия информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00160] сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки включает в себя:
[00161] извлечение текстовой информации начальной точки из изображения окружения начальной точки и извлечение текстовой информации конечной точки из изображения окружения конечной точки;
[00162] определение текстовой информации начальной точки как информации позиции начальной точки и определение текстовой информации конечной точки как информации позиции конечной точки; и
[00163] сбор видеоданных навигации по целевому пути на основе текстовой информации начальной точки и текстовой информации конечной точки.
[00164] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[00165] выделение видеоданных навигации по целевому пути от одних сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[00166] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[00167] сбор видеоданных навигации по целевому пути из множества сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[00168] В другом варианте осуществления настоящего раскрытия перед сбором видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки способ дополнительно включает в себя:
[00169] сбор видеоданных навигации по потенциальному пути.
[00170] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по потенциальному пути включает в себя:
[00171] сбор мобильных видеоданных и информации позиции, информация позиции представляют собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[00172] привязку информации позиции к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути.
[00173] В другом варианте осуществления настоящего раскрытия информация позиции включает в себя опорную информацию или текстовую информацию.
[00174] В другом варианте осуществления настоящего раскрытия после отправки видеоданных навигации по целевому пути целевому устройству способ дополнительно включает в себя:
[00175] прием запроса перепланирования пути, отправленный целевым устройством;
[00176] сбор новых видеоданных навигации по целевому пути на основе запроса перепланирования пути; и
[00177] отправку новых видеоданных навигации по целевому пути целевому устройству, в результате чего целевое устройство выполняет навигацию на основе новых видеоданных навигации по целевому пути.
[00178] Любая комбинация всех упомянутых выше факультативных технических решений может сформировать альтернативный вариант осуществления настоящего раскрытия, и в настоящем документе варианты осуществления настоящего раскрытия не будут подробно прорабатываться по отдельности.
[00179] Фиг. 2 является блок-схемой последовательности операций способа навигации в соответствии с иллюстративным вариантом осуществления. Как показано на фиг. 2, способ навигации используется в целевом устройстве и включает в себя следующие этапы.
[00180] На этапе 201 собирается информация начальной точки и информация конечной точки.
[00181] На этапе 202 информация начальной точки и информация конечной точки отправляется на сервер.
[00182] На этапе 203 принимаются видеоданные навигации по целевому пути от начальной точки до конечной точки, отправленный сервером, видеоданные навигации по целевому пути собираются сервером на основе информации начальной точки и информации конечной точки.
[00183] В вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, видеоданные навигации по целевому пути от начальной точки до конечной точки собираются на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройство, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, навигация может быть выполнена более интуитивно, понижается порог навигации, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00184] В другом варианте осуществления настоящего раскрытия информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00185] сбор информации начальной точки и информации конечной точки включает в себя:
[00186] при приеме команды навигации сбор данных изображения окружения начальной точки и изображения окружения конечной точки.
[00187] В другом варианте осуществления настоящего раскрытия широковещательная передача видеоданных навигации по целевому пути включает в себя:
[00188] обнаружение текущей скорости перемещения; и
[00189] широковещательную передачу видеоданных навигации по целевому пути на основе скорости перемещения, в результате чего скорость широковещательной передачи видеоданных навигации по целевому пути равна скорости перемещения.
[00190] В другом варианте осуществления настоящего раскрытия широковещательная передача видеоданных навигации по целевому пути включает в себя:
[00191] когда широковещательно передается позиция целевого изображения в видеоданных навигации по целевому пути, отображение информации запроса подтверждения маршрута, информация запроса подтверждения маршрута выполнена с возможностью предлагать пользователю подтверждать, происходит ли отклонение от целевого пути, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[00192] при приеме команды перепланирования маршрута на основе информации запроса подтверждения маршрута отправление запроса перепланирования маршрута на сервер, в результате чего сервер собирает новые видеоданные навигации по целевому пути на основе запроса перепланирования маршрута.
[00193] В другом варианте осуществления настоящего раскрытия способ дополнительно включает в себя:
[00194] сбор мобильных видеоданных и информации позиции; и
[00195] отправку мобильных видеоданных и информации позиции на сервер, в результате чего сервер привязывает мобильные видеоданные к целевому изображению.
[00196] В другом варианте осуществления настоящего раскрытия способ дополнительно включает в себя:
[00197] сбор мобильных видеоданных и информации позиции;
[00198] привязку мобильных видеоданных к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути; и
[00199] отправку видеоданных навигации по потенциальному пути на сервер.
[00200] Любая комбинация всех упомянутых выше факультативных технических решений может сформировать альтернативный вариант осуществления настоящего раскрытия, и в настоящем документе варианты осуществления настоящего раскрытия не будут подробно прорабатываться по отдельности.
[00201] Фиг. 3 является блок-схемой последовательности операций способа навигации в соответствии с иллюстративным вариантом осуществления. Как показано на фиг. 3, способ включает в себя следующие шаги.
[00202] На этапе 301 целевое устройство собирает информацию начальной точки и информацию конечной точки и отправляет информацию начальной точки и информацию конечной точки на сервер.
[00203] в вариантах осуществления настоящего раскрытия информация начальной точки и информация конечной точки могут представлять собой не только текстовую информацию, информацию изображения, речевую информацию и т.п., но также могут представлять собой комбинацию по меньшей мере двух элементов информации среди текстовой информации, информации изображения и речевой информации, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00204] Когда информация начальной точки и информация конечной точки представляют собой информацию изображения, т.е., информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки, при приеме команды навигации целевое устройство может собрать данные изображения окружения начальной точки и изображения окружения конечной точки, определить изображение окружения начальной точки как информацию начальной точки, определить изображение окружения конечной точки как информацию конечной точки и затем отправить информацию начальной точки и информацию конечной точки на сервер.
[00205] При сборе данных изображения окружения начальной точки целевое устройство может захватить изображение окружения позиции текущего местоположения, чтобы получить изображение окружения начальной точки. Чтобы улучшить эффективное использование изображения окружения начальной точки, при захвате изображения окружения позиции, в которой целевое устройство находится в настоящее время (т.е., текущей позиции целевого устройства) целевое устройство может захватить изображение позиции, имеющей текстовую информацию, или позиции, имеющей опорную точку в текущей позиции, чтобы получить изображение окружения начальной точки. Текстовая информация представляет собой относительно броское заметное слово в текущей позиции целевого устройства, и текстовая информация способна идентифицировать текущую позицию целевого устройства; и опорная точка может представлять собой здание, щит на автобусной остановке и т.п., что особым образом не определено вариантами осуществления настоящего раскрытия.
[00206] При сборе данных изображения окружения конечной точки целевое устройство может не только непосредственно выполнять его поиск из библиотеки изображений, сохраненной в целевом устройстве, но также может собрать данные изображения окружения конечной точки из сервера, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00207] При сборе данных изображения окружения конечной точки из сервера целевое устройство может принять описательную информацию изображение конечной точки, введенную пользователем, и отправить описательную информацию изображению конечной точки на сервер; при приеме описательной информации изображение конечной точки сервер может собрать данные по меньшей мере одного изображения, сопоставимого с описательной информацией изображения конечной точки, из библиотеки сохраненных изображений и отправить по меньшей мере одно изображение целевому устройству; при приеме по меньшей мере одного изображения целевое устройство может отобразить по меньшей мере одно изображение, и при приеме команды выбора назначенного изображения целевое устройство может определить назначенное изображение как изображение окружения конечной точки, назначенное изображение представляет собой любое изображение среди по меньшей мере одного изображения.
[00208] Следует разъяснить, что описательная информация изображения конечной точки может представлять собой не только текстовую информацию, речевую информацию и т.п., но также может представлять собой комбинацию по меньшей мере двух элементов информации в текстовой информации и речевой информации, что особым образом не определено вариантами осуществления настоящего раскрытия. Кроме того, команда выбора назначенного изображения используется для того, чтобы выбрать назначенное изображение по меньшей мере из одного изображения и может быть инициирована пользователем; пользователь может инициировать команду выбора назначенного изображения через назначенную операцию, и назначенная операция может представлять собой операцию щелчка, операцию проведения пальцем по экрану, голосовую операцию и т.п., что особым образом не определено вариантами осуществления настоящего раскрытия.
[00209] Также следует разъяснить, что когда целевое устройство непосредственно выполняет поиск изображения окружения конечной точки из библиотеки изображений, сохраненной в целевом устройстве пользователем, необходимо сохранить библиотеку изображений в целевом устройстве, и когда в библиотеке изображений имеется много изображений, занимаемый объем памяти целевого устройства является относительно большим, и чтобы реализовать навигацию, каждое устройство, которому требуется навигация, должно хранить библиотеку изображений; однако когда целевое устройство собирает данные изображения окружения конечной точки из сервера, поскольку библиотека изображений сохранена на сервере, все устройства, которым требуется навигация, могут собрать данные изображения из сервера, и это экономит объем памяти устройства, но устройство должно взаимодействовать с сервером, и это увеличивает количество взаимодействий и время взаимодействия. Тем самым в реальных приложениях для разных требований могут быть выбраны разные методы сбора данных, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00210] Целевое устройство может представлять собой интеллектуальные очки, смартфон, интеллектуальные часы и т.п., что особым образом не определено вариантами осуществления настоящего раскрытия.
[00211] Кроме того, команда навигации используется для навигации и может быть инициирована пользователем через назначенную операцию, что особым образом не определено вариантами осуществления настоящего раскрытия. Кроме того, способ навигации, обеспеченный вариантами осуществления настоящего раскрытия, может быть применен не только в навигации внутри помещения, но также в навигации вне помещения, что также особым образом не определено вариантами осуществления настоящего раскрытия.
[00212] Кроме того, способ навигации, обеспеченный вариантами осуществления настоящего раскрытия, может быть применен не только в навигации внутри помещения, но также применен в навигации вне помещения. Навигация внутри помещения выполняет навигацию на позиции текущего местоположения внутри помещения, позиция текущего местоположения внутри помещения обычно получается через позицию текущего местоположения, и позиция текущего местоположения может быть определена посредством информации географического положения текущего местоположения, тем самым, чтобы улучшить точность внутренней навигации, целевое устройство может определить информацию географического положения текущего местоположения, затем отправить информацию географическом положения текущего местоположения на сервер. Навигация вне помещения представляет собой навигацию между двумя разными позициями вне помещения, и две разные позиции вне помещения также обычно определяются посредством информации позиции, то есть, навигация вне помещения должна определить информацию географического положения начальной точки и информацию географического положения конечной точки. Таким образом, чтобы улучшить точность навигации вне помещения, целевое устройство может дополнительно определить информацию географического положения текущей позиции, определить информацию географического положения текущей позиции как информацию географического положения начальной точки, определить информацию географического положения конечной точки и затем отправить информацию географического положения начальной точки и информацию географического положения конечной точки на сервер.
[00213] Для навигации вне помещения при определении информации географического положения конечной точки целевое устройство может принять описательную информацию изображения конечной точки, введенную пользователем, и отправить описательную информацию изображению конечной точки на сервер; при приеме описательной информации изображения конечной точки сервер может собрать по меньшей мере одну информацию географического положения, сопоставленную с описательной информацией конечной точки, и отправить по меньшей мере одну информацию географического положения целевому устройству; при приеме по меньшей мере одной информации географического положения целевое устройство может отобразить по меньшей мере одну информацию географического положения, и при приеме команды выбора назначенной информации географического положения целевое устройство может определить назначенную информацию географического положения как информацию географического положения конечной точки, назначенная информация географического положения представляет собой любую информацию географического положения среди по меньшей мере одной информации географического положения.
[00214] Следует разъяснить, что целевое устройство может определить информацию географического положения текущей позиции через позиционирование с помощью системы глобального позиционирования (GPS), ручной вход или комбинацию позиционирования GPS и ручного входа, и информация географического положения может представлять собой текстовую информацию, речевую информацию или комбинацией текстовой информации и речевой информации, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00215] Кроме того, команда выбора назначенной информации географического положения используется для выбора назначенной информации географического положения по меньшей мере из одной информации географического положения, и команда выбора назначенной информации географического положения может быть инициирована пользователем через назначенную операцию, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00216] На этапе 302 при приеме информации начальной точки и информации конечной точки сервер собирает видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки.
[00217] Чтобы выполнять навигацию более интуитивно, варианты осуществления настоящего раскрытия выполняют навигацию через видеоданные навигации, то есть, при приеме информации начальной точки и информации конечной точки сервер должен собрать видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки. При сборе видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки посредством сервера сервер может собрать видеоданные навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки, причем информация начальной точки включает в себя информацию позиции начальной точки, и информация конечной точки включает в себя информацию позиции конечной точки.
[00218] Как упомянуто выше на этапе 301, информация начальной точки может включать в себя изображение окружения начальной точки, информация конечной точки включает в себя изображение окружения конечной точки, и информация начальной точки и информация конечной точки могут представлять собой не только опорную информацию, но также представлять собой текстовую информацию, и безусловно, могут представлять собой информацию GPS и т.п. Примеры вариантов осуществления настоящего раскрытия приведены посредством использования условия, в котором информация начальной точки и информация конечной точки представляют собой опорную информацию или текстовую информацию, тем самым сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки может включать в себя следующие два метода.
[00219] В первом методе сервер извлекает опорную информацию начальной точки из изображения окружения начальной точки и извлекает опорную информацию конечной точки из изображения окружения конечной точки; определяет опорную информацию начальной точки как информацию позиции начальной точки и определяет опорную информацию конечной точки как информацию позиции конечной точки; и собирает видеоданные навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки.
[00220] При сборе видеоданных навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки сервер может выделять видеоданные навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе опорной информации начальной точки и опорной информации конечной точки. В качестве альтернативы, сервер может собрать видеоданные навигации по целевому пути из множества сохраненных видеоданных навигации по потенциальному пути на основе опорной информации начальной точки и опорной информации конечной точки.
[00221] Операция выделения видеоданных навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе опорной информации начальной точки и опорной информации конечной точки посредством сервера может состоять в следующем: сервер анализирует несколько кадров экранов видеоданных из видеоданных навигации по потенциальному пути и соответствующим образом извлекает один фрагмент потенциальной опорной информации из нескольких кадров экранов видеоданных, чтобы получить несколько фрагментов потенциальной опорной информации; затем выбирает потенциальную опорную информацию, совпадающую с опорной информацией начальной точки, из нескольких фрагментов потенциальной опорной информации и определяет экран видеоданных, имеющий выбранную потенциальную опорную информацию, как экран видеоданных начальной точки; и выбирает потенциальную опорную информацию, совпадающую с конечной опорной информацией, из нескольких фрагментов потенциальной опорной информации и определяет экран видеоинформации, имеющий выбранную потенциальную опорную информацию, как экран видеоданных конечной точки; после этого сервер выделяет видеоданные между экраном видеоданных начальной точки и экраном видеоданных конечной точки из видеоданных навигации по потенциальному пути, чтобы получить видеоданные навигации по целевому пути.
[00222] Когда сервер собирает видеоданные навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути на основе опорной информации начальной точки и опорной информации конечной точки, каждые из нескольких видеоданных навигации по потенциальному пути включает в себя один фрагмент потенциальной опорной информации начальной точки и один фрагмент потенциальной опорной информации конечной точки, тем самым при выборе видеоданных навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути на основе опорной информации начальной точки и опорной информации конечной точки сервер может собрать потенциальную опорную информацию начальной точки и потенциальную опорную информацию конечной нескольких видеоданных навигации по потенциальному пути; выбрать видеоданные навигации по потенциальному пути, имеющие потенциальную опорную информацию начальной точки, совпадающую с опорной информацией начальной точки, из нескольких видеоданных навигации по потенциальному пути на основе потенциальной опорной информации начальной точки нескольких видеоданных навигации по потенциальному пути; решить, совпадает ли потенциальная опорная информация конечной точки выбранных видеоданных навигации по потенциальному пути с опорной информацией конечной точки; когда потенциальная опорная информация конечной точки выбранных видеоданных навигации по потенциальному пути не совпадает с опорной информацией конечной точки, использовать потенциальную опорную информацию конечной точки выбранных видеоданных навигации по потенциальному пути как опорную информацию начальной точки и вернуться к выполнению этапа выбора видеоданных навигации по потенциальному пути, имеющих потенциальную опорную информацию начальной точки, совпадающую с опорной информацией начальной точки, из нескольких видеоданных навигации по потенциальному пути на основе потенциальной опорной информации начальной точки нескольких видеоданных навигации по потенциальному пути, пока текстовая идентификация конечной точки выбранных видеоданных навигации по потенциальному пути не совпадет с опорной информацией конечной точки. Таким образом, сервер может выбрать по меньшей мере одни видеоданные навигации по потенциальному пути на целевом пути из нескольких видеоданных навигации по потенциальному пути и преобразовать по меньшей мере одни видеоданные навигации по потенциальному пути в видеоданные навигации по целевому пути.
[00223] Во втором методе сервер извлекает текстовую информацию начальной точки из изображения окружения начальной точки и извлекает текстовую информацию конечной точки из изображения окружения конечной точки; определяет текстовую информацию начальной точки как информацию позиции начальной точки и определяет текстовую информацию конечной точки как информацию позиции конечной точки; и собирает видеоданные навигации по целевому пути на основе текстовой информации начальной точки и текстовой информации конечной точки.
[00224] Что касается второго метода, сервер может выполнить распознавание текста на изображении окружения начальной точки, чтобы получить текстовую информацию начальной точки, и выполнить распознавание текста на изображении окружения конечной точки, чтобы получить текстовую информацию конечной точки, и затем сервер выделяет видеоданные навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе текстовой информации начальной точки и текстовой информации конечной точки. В качестве альтернативы, сервер может выполнить распознавание текста на изображении окружения начальной точки, чтобы получить текстовую информацию начальной точки, и выполнить распознавание текста на изображении окружения конечной точки, чтобы получить текстовую информацию конечной точки, и затем собрать видеоданные навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути на основе текстовой информации начальной точки и текстовой информации конечной точки.
[00225] Операция выделения видеоданных навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе текстовой информации начальной точки и текстовой информации конечной точки посредством сервера может состоять в следующем: сервер анализирует несколько кадров экранов видеоданных из видеоданных навигации по потенциальному пути и соответствующим образом извлекает один фрагмент потенциальной текстовой информации из нескольких кадров экранов видеоданных, чтобы получить несколько фрагментов потенциальной текстовой информации; затем выбирает потенциальную текстовую информацию, совпадающую с текстовой информацией начальной точки, из нескольких фрагментов потенциальной текстовой информации и определяет экран видеоданных, имеющий выбранную потенциальную текстовую информацию, как экран видеоданных начальной точки; и выбирает потенциальную текстовую информацию, совпадающую с конечной текстовой информацией, из нескольких фрагментов потенциальной текстовой информации и определяет экран видеоданных, имеющий выбранную потенциальную текстовую информацию, как экран видеоданных конечной точки; после этого сервер выделяет видеоданные между экраном видеоданных начальной точки и экраном видеоданных конечной точки из видеоданных навигации по потенциальному пути, чтобы получить видеоданные навигации по целевому пути.
[00226] В вариантах осуществления настоящего раскрытия каждые из нескольких видеоданных навигации по потенциальному пути могут включать в себя потенциальную текстовую информацию начальной точки и потенциальную текстовую информацию конечной точки. Тем самым при выборе видеоданных навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути на основе текстовой информации начальной точки и текстовой информации конечной точки сервер может собрать потенциальную текстовую информацию начальной точки и потенциальную текстовую информацию конечной точки нескольких видеоданных навигации по потенциальному пути; выбрать видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию начальной точки, совпадающую с текстовой информацией начальной точки, из нескольких видеоданных навигации по потенциальному пути на основе потенциальной текстовой информации начальной точки нескольких видеоданных навигации по потенциальному пути; определить, совпадает ли потенциальная текстовая информация конечной точки выбранных видеоданных навигации по потенциальному пути с текстовой информацией конечной точки; когда потенциальная текстовая информация конечной точки выбранных видеоданных навигации по потенциальному пути не совпадает с текстовой информацией конечной точки, использовать потенциальную текстовую информацию конечной точки выбранных видеоданных навигации по потенциальному пути как текстовую информацию начальной точки, вернуться к выполнению этапа выбора видеоданных навигации по потенциальному пути, имеющих потенциальную текстовую информацию начальной точки, совпадающую с текстовой информацией начальной точки, из нескольких видеоданных навигации по потенциальному пути на основе потенциальной текстовой информации начальной точки нескольких видеоданных навигации по потенциальному пути, пока текстовая идентификация конечной точки выбранных видеоданных навигации по потенциальному пути не совпадет с опорной информацией конечной точки. Таким образом, сервер может выбрать по меньшей мере одни видеоданные навигации по потенциальному пути на целевом пути из нескольких видеоданных навигации по потенциальному пути и преобразовать по меньшей мере одни видеоданные навигации по потенциальному пути в видеоданные навигации по целевому пути.
[00227] Например, сервер выполняет распознавание текста на изображении окружения начальной точки, чтобы получить текстовую информацию A начальной точки, и выполняет распознавание текста на изображении окружения конечной точки, чтобы получить текстовую информацию F конечной точки, в предположении, что несколько видеоданных навигации по потенциальному пути, собранных сервером, представляют собой соответственно видеоданные 21 навигации, видеоданные 22 навигации, видеоданные 23 навигации, видеоданные 24 навигации и видеоданные 25 навигации, потенциальная текстовая информация начальной точки видеоданных 21 навигации представляет собой A, потенциальная текстовая информация конечной точки видеоданных 21 навигации представляет собой B, потенциальная текстовая информация начальной точки видеоданных 22 навигации представляет собой D, потенциальная текстовая информация конечной точки видеоданных 22 навигации представляет собой F, потенциальная текстовая информация начальной точки видеоданных 23 навигации представляет собой B, потенциальная текстовая информация конечной точки видеоданных 23 навигации представляет собой D, потенциальная текстовая информация начальной точки видеоданных 24 навигации представляет собой G, потенциальная текстовая информация конечной точки видеоданных 24 навигации представляет собой H, потенциальная текстовая информация начальной точки видеоданных 25 навигации представляет собой M, потенциальная текстовая информация конечной точки видеоданных 25 навигации представляет собой N, видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию начальной точки, совпадающую с текстовой информацией начальной точки, выбранной из пяти видеоданных навигации по потенциальному пути на основе текстовой информации A начальной точки посредством сервера, представляют собой видеоданные 21 навигации, но потенциальная текстовая информация B конечной точки видеоданных 21 навигации отличается от текстовой информации F конечной точки, тем самым сервер использует потенциальную текстовую информацию B конечной точки видеоданных 21 навигации как текстовую информацию начальной точки; видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию начальной точки, совпадающую с текстовой информацией начальной точки, выбранной из пяти видеоданных навигации по потенциальному пути, представляют собой видеоданные 23 навигации, но потенциальная текстовая информация D конечной точки видеоданных 23 навигации отличается от текстовой информации F конечной точки, тем самым сервер используют потенциальную текстовую информацию D конечной точки видеоданных 23 навигации как текстовую информацию начальной точки; видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию начальной точки, совпадающую с текстовой информацией начальной точки, выбранной из пяти видеоданных навигации по потенциальному пути, представляют собой видеоданные 22 навигации, и потенциальная текстовая информация F конечной точки видеоданных 22 навигации совпадает с текстовой информацией F конечной точки, при этом сервер определяет видеоданные 21 навигации, видеоданные 23 навигации и видеоданные 22 навигации как по меньшей мере одни видеоданные навигации по потенциальному пути на целевом пути, и составляет видеоданные навигации по целевому пути на основе этих по меньшей мере одних видеоданных навигации по потенциальному пути.
[00228] Следует разъяснить, что сервер может собрать видеоданные навигации по целевому пути в соответствии с двумя упомянутыми выше методами соответственно, и сервер также может объединить два упомянутые выше метода для сбора видеоданных навигации по целевому пути, чтобы увеличить точность сбора видеоданных навигации по целевому пути.
[00229] Кроме того, упомянутая выше информация начальной точки и информация конечной точки могут представлять собой не только текстовую информацию, информацию изображения, но также могут представлять собой информацию GPS и т.п. Тем самым сервер может не только собрать видеоданные навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки через упомянутые выше способы, сервер может также выделять видеоданные навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки. В качестве альтернативы, сервер может собрать видеоданные навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки. Между тем способ выделения видеоданных навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки посредством сервера может совпадать с упомянутыми выше способами, и способ сбора видеоданных навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки посредством сервера может совпадать с упомянутыми выше способами, и это не прорабатывается вариантами осуществления настоящего раскрытия.
[00230] Кроме того, прежде чем собрать видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки посредством сервера, сервер может дополнительно собрать видеоданные навигации по потенциальному пути.
[00231] При сборе видеоданных навигации по потенциальному пути сервер может собрать мобильные видеоданные и информацию позиции, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и затем сервер привязывает информацию позиции к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути. Информация позиции может включать в себя опорную информацию или текстовую информацию. В реальных приложениях информация позиции может дополнительно включать в себя другую информацию, такую как информация географического положения, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00232] Кроме того, при выполнении навигации вне помещения, и когда сервер принимает информацию географического положения начальной точки и информацию географического положения конечной точки, отправленную целевым устройством, чтобы улучшить точность навигации вне помещения, сервер также может выделять видеоданные навигации между географическим положением начальной точки и географическим положением конечной точки из сохраненных видеоданных навигации по потенциальному пути на основе информации географического положения начальной точки и информации географического положения конечной точки и выделять видеоданные навигации по целевому пути из выделенных видеоданных навигации в соответствии с упомянутыми выше способами, при этом информация географического положения каждого экрана видеоданных привязана в видеоданных навигации по потенциальному пути. При сборе видеоданных навигации по целевому пути из сохраненных нескольких видеоданных навигации по потенциальному пути сервер также может выбрать видеоданные навигации по потенциальному пути между географическим положением начальной точки и географическим положением конечной точки из нескольких видеоданных навигации по потенциальному пути на основе информации географического положения начальной точки и информации географического положения конечной точки и собрать видеоданные навигации по целевому пути из выбранных видеоданных навигации по потенциальному пути в соответствии с упомянутыми выше способами.
[00233] При выполнении навигации внутри помещения несколько видеоданных навигации по потенциальному пути могут представлять собой видеоданные навигации по потенциальному пути нескольких мест, то есть, несколько видеоданных навигации по потенциальному пути могут представлять собой видеоданные навигации по потенциальному пути, соответствующие нескольким элементам информации географического положения, и когда несколько видеоданных навигации по потенциальному пути сохраняют видеоданные навигации по потенциальному пути, соответствующие нескольким элементам информации географического положения, в целом сохраняются соответствующие отношения между информацией географического положения и видеоданными навигации по потенциальному пути, и места каждого элемента информации географического положения могут включать в себя несколько пространств внутри помещения, тем самым, чтобы выполнить навигацию внутри помещения в местах информации географического положения и улучшить точность навигации внутри помещения, при приеме информации географического положения текущей позиции целевого устройства сервер может собрать несколько видеоданных навигации по потенциальному пути, соответствующих информации географического положения, из соответствующих отношений между информацией географического положения и видеоданными навигации по потенциальному пути на основе информации географического положения и затем собрать видеоданные навигации по целевому пути из нескольких видеоданных навигации по потенциальному пути, соответствующих информации географического положения.
[00234] Кроме того, прежде чем сервер собирает несколько видеоданных навигации по потенциальному пути, соответствующих информации географического положения, из нескольких видеоданных навигации по потенциальному пути, мобильные видеоданные и информация позиции, собранные сервером, могут быть отправлены множеством устройств захвата видеоданных или могут быть отправлены одним устройством захвата видеоданных, и когда информация позиции представляет собой информацию географического положения, информация позиции, соответствующая каждому целевому изображению в мобильных видеоданных, является одинаковой, тем самым сервер может принять мобильные видеоданные и информацию географического положения, отправленную по меньшей мере одним устройством захвата видеоданных; для каждого устройства захвата видеоданных среди по меньшей мере одного устройства захвата видеоданных сервер может идентифицировать множество целевых изображений из мобильных видеоданных, отправленных устройством захвата видеоданных; проанализировать мобильные видеоданные, отправленные устройством захвата видеоданных, на основе множества целевых изображений, чтобы получить множество видеоданных навигации по потенциальному пути; и сохранить множество видеоданных навигации по потенциальному пути на основе информации географического положения устройства захвата видеоданных.
[00235] Поскольку мобильные видеоданные могут включать в себя множество целевых изображений, и каждое целевое изображение получено посредством захвата позиции внутри помещения, имеющей опорную информацию или текстовую информацию, множество целевых изображений, идентифицированных из мобильных видеоданных, может выполнять различие в множестве позиций внутри помещения, то есть, мобильные видеоданные могут идентифицировать множество позиций внутри помещения. Кроме того, поскольку может иметься множество позиций внутри помещения на одном пути, и позиции внутри помещения на разных путях могут отличаться, то есть, целевой путь, по которому перемещается целевое устройство, может отличаться от пути, соответствующего мобильным видеоданным, загруженным устройством захвата видеоданных, тем самым, чтобы сформировать множество путей для удовлетворения требованиям навигации большего количества пользователей, сервер может проанализировать мобильные видеоданные на основе множества целевых изображений в мобильных видеоданных, чтобы получить множество видеоданных навигации по потенциальному пути.
[00236] Поскольку видеоданные могут включать в себя множество кадров видеоизображений, и когда существует по меньшей мере два кадра последовательных видеоизображений, имеющих одно и то же изображение, во множестве кадров видеоизображений, по меньшей мере два кадра последовательных видеоизображений, имеющих одно и то же изображение, могут быть определены как целевое изображение. Тем самым при идентификации множества целевых изображений из мобильных видеоданных, отправленных устройством захвата видеоданных, сервер может собрать множество кадров видеоизображений, включенных в мобильные видеоданные, и сравнить смежные видеоизображения во множестве кадров видеоизображений, и когда существует по меньшей мере два кадра последовательных видеоизображений, имеющих одно и то же изображение, во множестве кадров видеоизображений, сервер может определить по меньшей мере два кадра последовательных видеоизображений, имеющих одно и то же изображение, как целевое изображение и затем идентифицировать множество целевых изображений из мобильных видеоданных.
[00237] В качестве альтернативы, сервер также может определить подобие между смежными по меньшей мере двумя кадрами видеоизображений во множестве кадров видеоизображений, и когда подобие между смежными по меньшей мере двумя кадрами видеоизображений больше, чем назначенное подобие, определить смежные по меньшей мере два кадра видеоизображений как целевое изображение мобильных видеоданных. Назначенное подобие может быть назначено заранее. Например, назначенное подобие может составлять 80%, 90% и т.п., что особым образом не определено вариантами осуществления настоящего раскрытия.
[00238] Например, мобильные видеоданные, отправленные устройством захвата видеоданных, представляют собой мобильные видеоданные 1, несколько кадров видеоизображений, включенных в мобильные видеоданные 1, собранные сервером, представляют собой соответственно изображение 1, изображение 2, изображение 3, изображение 4, изображение 5, изображение 6, изображение 7, изображение 8, изображение 9, изображение 10, … и изображение 50, сервер сравнивает смежные видеоизображения в нескольких кадрах видеоизображений, определяет, что изображение 1, изображение 2 и изображение 3 в нескольких кадрах видеоизображений являются последовательными видеоизображениями, имеющими одно и то же изображение, определяет, что изображение 8 и изображение 9 являются последовательными видеоизображениями, имеющими одно и то же изображение, определяет, что изображение 15, изображение 16 и изображение 17 являются последовательными видеоизображениями, имеющими одно и то же изображение, определяет, что изображение 22, изображение 23 и изображение 24 являются последовательными видеоизображениями, имеющими одно и то же изображение, определяет, что изображение 30 и изображение 31 являются последовательными видеоизображениями, имеющими одно и то же изображение, определяет, что изображение 43, изображение 44 и изображение 45 являются последовательными видеоизображениями, имеющими одно и то же изображение, и определяет, что изображение 49 и изображение 50 являются последовательными видеоизображениями, имеющими одно и то же самое, тогда изображение 1, изображение 2 и изображение 3 определены как первое целевое изображение мобильных видеоданных, изображение 8 и изображение 9 определены как второе целевое изображение мобильных видеоданных, изображение 15, изображение 16 и изображение 17 определены как третье целевое изображение мобильных видеоданных, изображение 22, изображение 23 и изображение 24 определены как четвертое целевое изображение мобильных видеоданных, изображение 31 и изображение 32 определены как пятое целевое изображение мобильных видеоданных, изображение 43, изображение 44 и изображение 45 определено как шестое целевое изображение мобильных видеоданных, и изображение 49 и изображение 50 определены как седьмое целевое изображение мобильных видеоданных.
[00239] Операция декомпозиции мобильных видеоданных, отправленных устройством захвата видеоданных, на основе нескольких целевых изображений для получения нескольких видеоданных навигации по потенциальному пути посредством сервера может состоять в следующем: выполнение распознавания текста на нескольких целевых изображениях соответственно для получения нескольких элементов ключевой текстовой информации; и декомпозиция мобильных видеоданных, отправленных устройством захвата видеоданных, на основе нескольких элементов ключевой текстовой информации для получения нескольких видеоданных навигации по потенциальному пути, причем все несколько видеоданных навигации по потенциальному пути включают в себя потенциальную текстовую информацию начальной точки и потенциальную текстовую информацию конечной точки, и потенциальная текстовая информация конечной точки первых видеоданных навигации по потенциальному пути совпадает с потенциальной текстовой информацией начальной точки во вторых видеоданных навигации по потенциальному пути в нескольких видеоданных навигации по потенциальному пути, первые видеоданные навигации по потенциальному пути и вторые видеоданные навигации по потенциальному пути представляют собой любые видеоданные навигации по потенциальному пути в нескольких видеоданных навигации по потенциальному пути, и вторые видеоданные навигации по потенциальному пути являются смежными видеоданными навигации по потенциальному пути рядом с первыми видеоданными навигации по потенциальному пути.
[00240] В качестве альтернативы, сервер выполняет распознавание текста на нескольких целевых изображениях для получения нескольких элементов ключевой опорной информации; анализирует мобильные видеоданные, отправленные устройством захвата видеоданных, на основе нескольких элементов ключевой опорной информации для получения нескольких видеоданных навигации по потенциальному пути, причем все несколько видеоданных навигации по потенциальному пути включают в себя потенциальную опорную информацию начальной точки и потенциальную опорную информацию конечной точки, и потенциальная опорная информация конечной точки первых видеоданных навигации по потенциальному пути совпадает с потенциальной опорной информацией начальной точки во вторых видеоданных навигации по потенциальному пути в нескольких видеоданных навигации по потенциальному пути, первые видеоданные навигации по потенциальному пути и вторые видеоданные навигации по потенциальному пути представляют собой любые видеоданные навигации по потенциальному пути в нескольких видеоданных навигации по потенциальному пути, и вторые видеоданные навигации по потенциальному пути являются смежными видеоданными навигации по потенциальному пути рядом с первыми видеоданными навигации по потенциальному пути.
[00241] Кроме того, операция сохранения нескольких видеоданных навигации по потенциальному пути на основе информации географического положения устройства захвата видеоданных посредством сервера может состоять в следующем: сервер может сохранить информацию географического положения устройства захвата видеоданных и несколько видеоданных навигации по потенциальному пути в соответствующих отношениях между информацией географического положения и видеоданными навигации по потенциальному пути.
[00242] Например, несколько целевых изображений, идентифицированных из мобильных видеоданных 1 посредством сервера, представляют собой соответственно изображение 1, изображение 8, изображение 16, изображение 23, изображение 30, изображение 44 и изображение 49, сервер выполняет распознавание текста на нескольких изображениях, и затем полученная ключевая текстовая информация изображения 1 представляет собой A, полученная ключевая текстовая информация изображения 8 представляет собой B, полученная ключевая текстовая информация изображения 16 представляет собой C, полученная ключевая текстовая информация изображения 23 представляет собой D, полученная ключевая текстовая информация изображения 30 представляет собой E, полученная ключевая текстовая информация изображения 44 представляет собой F, и полученная ключевая текстовая информация изображения 49 представляет собой G, на основе нескольких элементов ключевой текстовой информации, мобильные видеоданные 1 подвергаются декомпозиции на несколько видеоданных навигации по потенциальному пути, которые соответственно представляют собой видеоданные 1 навигации, видеоданные 2 навигации, видеоданные 3 навигации, видеоданные 4 навигации, видеоданные 5 навигации и видеоданные 6 навигации, и текстовая информация начальной точки видеоданных 1 навигации представляет собой A, текстовая информация конечной точки видеоданных 1 навигации представляет собой B, текстовая информация начальной точки видеоданных 2 навигации представляет собой B, текстовая информация конечной точки видеоданных 2 навигации представляет собой C, текстовая информация начальной точки видеоданных 3 навигации представляет собой C, текстовая информация конечной точки видеоданных 3 навигации представляет собой D, текстовая информация начальной точки видеоданных 4 навигации представляет собой D, текстовая информация конечной точки видеоданных 4 навигации представляет собой E, текстовая информация начальной точки видеоданных 5 навигации представляет собой E, текстовая информация конечной точки видеоданных 5 навигации представляет собой F, текстовая информация начальной точки видеоданных 6 навигации представляет собой F, текстовая информация конечной точки видеоданных 6 навигации представляет собой G; при условии, что информация географического положения устройства захвата видеоданных представляет собой информацию географического положения 1, тогда сервер может сохранить информацию географического положения 1 и несколько видеоданных навигации по потенциальному пути в соответствующих отношениях между информацией географического положения и видеоданными навигации по потенциальному пути, как показано ниже в таблице 1.
[00243]
|
[00244] Следует разъяснить, что варианты осуществления настоящего раскрытия проиллюстрированы только с помощью соответствующих отношений между информацией географического положения и видеоданными навигации по потенциальному пути, как показано выше в таблице 1, и это не ограничивает варианты осуществления настоящего раскрытия.
[00245] Кроме того, целевым устройством может являться любое устройство из нескольких устройств захвата видеоданных. Целевым устройством также может являться другое устройство в дополнение к нескольким устройствам захвата видеоданных. Таким образом, целевым устройством может являться устройство захвата видеоданных или может являться устройство в дополнение к устройству захвата видеоданных, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00246] Кроме того, поскольку целевым устройством может являться устройство захвата видеоданных, целевое устройство также может собирать мобильные видеоданные и информацию позиции; отправлять мобильные видеоданные и информацию позиции на сервер, в результате чего сервер привязывает мобильные видеоданные к информации позиции. Затем сервер также может подвергнуть декомпозиции мобильные видеоданные на несколько видеоданных навигации по потенциальному пути и сохранить несколько видеоданных навигации по потенциальному пути. В качестве альтернативы, целевое устройство также может собирать мобильные видеоданные и информацию позиции, привязывать мобильные видеоданные к информации позиции для получения видеоданных навигации по потенциальному пути и отправлять видеоданные навигации по потенциальному пути на сервер.
[00247] Сервер должен идентифицировать несколько целевых изображений из мобильных видеоданных, отправленных устройством захвата видеоданных, и подвергнуть декомпозиции мобильные видеоданные на основе нескольких целевых изображений, и текстовая идентификация в нескольких целевых изображениях используется для идентификации позиций внутри помещения, тем самым, при регистрации мобильных видеоданных на маршруте обхода целевое устройство должно оставаться в позиции, имеющей опорную информацию или имеющей текстовую информацию, таким образом, несколько целевых изображений формируются в мобильных видеоданных. Продолжительность пребывания целевого устройства в позиции, имеющей опорную информацию или имеющей текстовую информацию, может быть определено пользователем, и продолжительность пребывания может составить 1 секунду, 2 секунды и т.п., что особым образом не определено вариантами осуществления настоящего раскрытия.
[00248] Следует разъяснить, что при выполнении навигации внутри помещения видеоизображения, включенные в мобильные видеоданные, отправленные устройством захвата видеоданных или целевым устройством, могут представлять собой изображения позиции внутри помещения, тем самым видеоизображения, включенные в сохраненные видеоданные навигации по потенциальному пути, также могут представлять собой изображения позиции внутри помещения.
[00249] Кроме того, способ распознавания текста в нескольких целевых изображениях посредством сервера может быть отнесен к соответствующей технологии, которая не прорабатывается в вариантах осуществления настоящего раскрытия.
[00250] Кроме того, сервер сохраняет видеоданные навигации по потенциальному пути на основе соответствующих отношений между информацией географического положения и видеоданными навигации по потенциальному пути, тем самым может быть достигнуто точное соответствие между видеоданными навигации по потенциальному пути и соответствующей информацией географического положения, и эффективность и точность навигации внутри помещения увеличиваются; и несколько устройств захвата видеоданных отправляют на сервер захваченные мобильные видеоданные и информацию географического положения позиции, в которой мобильные видеоданные захвачены, тем самым сервер может своевременно обновлять сохраненные несколько видеоданных навигации по потенциальному пути, что дополнительно увеличивает точность навигации.
[00251] На этапе 303 сервер отправляет видеоданные навигации по целевому пути целевому устройству.
[00252] Из упомянутого выше этапа 302 может быть известно, что видеоданные навигации по целевому пути могут быть получены посредством выделения видеоданных навигации по потенциальному пути или могут быть составлены по меньшей мере из одних видеоданных навигации по потенциальному пути. Когда видеоданные навигации по целевому пути составлены по меньшей мере из одних видеоданных навигации по потенциальному пути, сервер может определить последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути на основе потенциальной текстовой информации начальной точки и потенциальной текстовой информации конечной точки этих по меньшей мере одних видеоданных навигации по потенциальному пути и отправить последовательность пути и эти по меньшей мере одни видеоданные навигации по потенциальному пути целевому устройству. Кроме того, сервер может отправить эти по меньшей мере одни видеоданные навигации по потенциальному пути целевому устройству на основе последовательности пути, в результате чего целевое устройство определяет последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути на основе времени приема этих по меньшей мере одних видеоданных навигации по потенциальному пути. Если в сети между сервером и целевым устройством произойдет сбой, то последовательность приема этих по меньшей мере одних видеоданных навигации по потенциальному пути будет отличаться от последовательности пути, определенной сервером, и тогда последовательность пути, определенная целевым устройством, будет отличаться от последовательности пути, определенной на стороне сервера, тем самым, при приеме этих по меньшей мере одних видеоданных навигации по потенциальному пути целевое устройство может также выполнить распознавание текста на этих по меньшей мере одних видеоданных навигации по потенциальному пути, чтобы определить последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути на основе потенциальной текстовой информации начальной точки и потенциальной текстовой информации конечной точки этих по меньшей мере одних видеоданных навигации по потенциальному пути, или сервер может извлечь потенциальную опорную информацию начальной точки и потенциальную опорную информацию конечной точки из этих по меньшей мере одних видеоданных навигации по потенциальному пути, чтобы определить последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути на основе потенциальной опорной информации начальной точки и потенциальной опорной информации конечной точки этих по меньшей мере одних видеоданных навигации по потенциальному пути, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00253] При определении последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути на основе потенциальной текстовой информации начальной точки и потенциальной текстовой информации конечной точки этих по меньшей мере одних видеоданных навигации по потенциальному пути посредством сервера сервер выбирает для третьих видеоданных навигации по потенциальному пути видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию начальной точки, совпадающую с потенциальной текстовой информацией конечной точки третьих видеоданных навигации по потенциальному пути, из набора видеоданных, третьи видеоданные навигации по потенциальному пути представляют собой любые видеоданные навигации по потенциальному пути среди этих по меньшей мере одних видеоданных навигации по потенциальному пути, и набор видеоданных включает в себя остальные видеоданные навигации по потенциальному пути в дополнение к третьим видеоданным навигации по потенциальному пути; устанавливает последовательность пути выбранных видеоданных навигации по потенциальному пути после третьих видеоданных навигации по потенциальному пути; решает, существуют ли другие видеоданные навигации по потенциальному пути в дополнение к выбранным видеоданным навигации по потенциальному пути в наборе видеоданных, если существуют, использует выбранные видеоданные навигации по потенциальному пути в качестве третьих видеоданных навигации по потенциальному пути и удаляет выбранные видеоданные навигации по потенциальному пути из набора видеоданных, чтобы обновить набор видеоданных, и возвращается к выполнению этапа выбора видеоданных навигации по потенциальному пути, имеющих потенциальную текстовую информацию начальной точки, совпадающую с потенциальной текстовой информацией конечной точки третьих видеоданных навигации по потенциальному пути, из набора видеоданных на основе обновленного набора видеоданных, до тех пор пока нет видеоданных навигации по потенциальному пути в наборе видеоданных, тем самым определяя последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути.
[00254] Способ определения последовательности пути этих по меньшей мере одних видеоданных навигации по потенциальному пути на основе потенциальной опорной информации начальной точки и потенциальной опорной информации конечной точки этих по меньшей мере одних видеоданных навигации по потенциальному пути посредством сервера совпадает со способом определения последовательности пути на основе текстовой информации, и это не прорабатывается в вариантах осуществления настоящего раскрытия.
[00255] Например, эти по меньшей мере одни видеоданные навигации по потенциальному пути представляют собой видеоданные 21 навигации, видеоданные 23 навигации и видеоданные 22 навигации, потенциальная текстовая информация начальной точки видеоданных 21 навигации представляет собой A, потенциальная текстовая информация конечной точки видеоданных 21 навигации представляет собой B, потенциальная текстовая информация начальной точки видеоданных 22 навигации представляет собой D, потенциальная текстовая информация конечной точки видеоданных 22 навигации представляет собой F, потенциальная текстовая информация начальной точки видеоданных 23 навигации представляет собой B, и потенциальная текстовая информация конечной точки видеоданных 23 навигации представляет собой D, в предположении, что третьи видеоданные навигации по потенциальному пути представляют собой видеоданные 21 навигации, тогда видеоданные 22 навигации и видеоданные 23 навигации составляют набор видеоданных, из набора видеоданных видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию конечной точки, совпадающую с потенциальной текстовой информацией B конечной точки видеоданных 21 навигации выбираются как видеоданные 23 навигации, и это определяется, что в наборе видеоданных существуют другие видеоданные навигации по потенциальному пути в дополнение к видеоданным 23 навигации, тогда видеоданные 23 навигации используются в качестве третьих видеоданных навигации по потенциальному пути, и видеоданные 23 навигации удаляются из набора видеоданных для получения обновленного набора видеоданных, из обновленного набора видеоданных видеоданные навигации по потенциальному пути, имеющие потенциальную текстовую информацию конечной точки, совпадающую с потенциальной текстовой информацией D конечной точки видеоданных 23 навигации, выбираются как видеоданные 22 навигации, и определяется, что в обновленном наборе видеоданных, в котором удалены видеоданные 22 навигации, нет других видеоданных навигации по потенциальному пути, тем самым, последовательность пути этих по меньшей мере одних видеоданных навигации по потенциальному пути представляет собой видеоданные 21 навигации, видеоданные 23 навигации и видеоданные 22 навигации.
[00256] Следует разъяснить, что при определении видеоданных навигации по целевому пути сервер может определить несколько видеоданных пути навигации и затем выбрать видеоданные пути навигации по умолчанию из нескольких видеоданных пути навигации и определить видеоданные пути навигации по умолчанию как видеоданные навигации по целевому пути и отправить их целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути. Кроме того, сервер может соответственно отправить несколько видеоданных пути навигации целевому устройству, в результате чего пользователь выбирает видеоданные пути навигации из нескольких видеоданных пути навигации для выполнения навигации, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00257] На этапе 304, когда целевое устройство принимает видеоданные навигации по целевому пути от начальной точки до конечной точки, отправленные сервером в ответ на принятую операцию инициирования навигации, видеоданные навигации по целевому пути широковещательно передаются.
[00258] Когда целевое устройство принимает видеоданные навигации по целевому пути от начальной точки до конечной точки, отправленные сервером, если целевое устройство принимает операцию инициирования навигации, целевое устройство может ответить на операцию инициирования навигации и широковещательно передать видеоданные навигации по целевому пути. Операция инициирования навигации может быть инициирована пользователем, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00259] Когда целевое устройство широковещательно передает видеоданные навигации по целевому пути, целевое устройство также может обнаружить текущую скорость движения и затем широковещательно передать видеоданные навигации по целевому пути на основе текущей скорости движения, в результате чего скорость широковещательной передачи видеоданных навигации по целевому пути равна текущей скорости движения, что улучшает эффект навигации.
[00260] Когда видеоданные навигации по целевому пути составлены по меньшей мере из одних видеоданных навигации по потенциальному пути, поскольку эти по меньшей мере одни видеоданные навигации по потенциальному пути имеют определенную последовательность пути, когда целевое устройство выполняет навигацию на основе этих по меньшей мере одних видеоданных навигации по потенциальному пути, целевое устройство может широковещательно передать эти по меньшей мере одни видеоданные навигации по потенциальному пути на основе последовательности пути этих по меньшей мере одних видеоданных навигации по потенциальному пути; для каждых видеоданных навигации по потенциальному пути в этих по меньшей мере одних видеоданных навигации по потенциальному пути при широковещательной передачи позиции, привязанной к информации позиции в видеоданных навигации по потенциальному пути, отображается информация запроса подтверждения маршрута, информация запроса подтверждения маршрута выполнена с возможностью предлагать пользователю определить, имеется ли отклонение от пути навигации, и информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; при приеме команды перепланирования маршрута на основе информации запроса подтверждения маршрута целевое устройство отправляет запрос перепланирования маршрута на сервер. При приеме запроса перепланирования маршрута, отправленного целевым устройством, сервер собирает новые видеоданные навигации по целевому пути в соответствии с запросом перепланирования маршрута и отправляет новые видеоданные навигации по целевому пути целевому устройству, в результате чего целевое устройство выполняет навигацию на основе новых видеоданных навигации по целевому пути.
[00261] Следует разъяснить, что поскольку при сохранении нескольких видеоданных навигации по потенциальному пути, подвергнутых декомпозиции из мобильных видеоданных, сервер привязывает каждые видеоданные навигации по потенциальному пути к информации позиции для каждых видеоданных навигации по потенциальному пути в этих по меньшей мере одних видеоданных навигации по потенциальному пути, при широковещательной передаче позиции в видеоданных навигации по потенциальному пути, привязанных к информации позиции, целевое устройство может приостановить широковещательную передачу видеоданных навигации по потенциальному пути и отобразить информацию запроса подтверждения маршрута.
[00262] Когда при приеме команды перепланирования целевое устройство может определить, что путь навигации, по которому в настоящее время выполняется навигация, не соответствует желаемому пути пользователя, тогда целевое устройство может перепланировать путь навигации через сервер. Кроме того, когда при приеме команды подтверждения на основе информации запроса подтверждения маршрута целевое устройство определяет, что путь навигации, по которому в настоящее время выполняется навигация, соответствует желаемому пути пользователя, тогда целевое устройство может продолжить широковещательно передавать видеоданные навигации по потенциальному пути, и если широковещательно передаваемые в настоящее время видеоданные навигации по потенциальному пути являются последними видеоданными навигации по потенциальному пути в этих по меньшей мере одних видеоданных навигации по потенциальному пути, широковещательная передача видеоданных навигации по потенциальному пути останавливается.
[00263] Следует разъяснить, что информация запроса подтверждения маршрута может представлять собой текстовую информацию, речевую информацию или комбинацию текстовой информации и речевой информации, что особым образом не определено вариантами осуществления настоящего раскрытия. Кроме того, команда перепланирования маршрута и команда подтверждения могут быть инициированы пользователем через назначенную операцию, что особым образом не определено вариантами осуществления настоящего раскрытия.
[00264] Кроме того, когда сервер принимает запрос перепланирования маршрута, отправленный целевым устройством, если запрос перепланирования маршрута несет новую информацию начальной точки, сервер может повторно выбрать видеоданные навигации по целевому пути на основе новой информации начальной точки и информации конечной точки; и отправить повторно выбранные видеоданные навигации по целевому пути целевому устройству, в результате чего целевое устройство выполняет навигацию на основе повторно выбранных видеоданных навигации по целевому пути.
[00265] Следует разъяснить, что при выполнении навигации внутри помещения место, в котором целевое устройство отправляет запрос перепланирования маршрута, может совпасть с местом первоначальной информации начальной точки или может отличаться от места первоначальной информации начальной точки. Тем самым запрос перепланирования маршрута, отправленный целевым устройством на сервер, может не нести новую информацию географического положения или может нести новую информацию географического положения, новая информация географического положения представляет собой информацию географического положения места, в котором целевое устройство отправляет запрос перепланирования маршрута. Если запрос перепланирования маршрута не несет новую информацию географического положения, сервер может повторно выбрать видеоданные навигации по целевому пути из нескольких видеоданных навигации по потенциальному пути, собранных на этапе 302. Если запрос перепланирования маршрута несет новую информацию географического положения, сервер может повторно собрать несколько видеоданных навигации по потенциальному пути, соответствующих новой информации географического положения, из сохраненных нескольких видеоданных навигации по потенциальному пути на основе новой информации географического положения, затем выбрать видеоданные навигации по целевому пути на основе повторно собранных нескольких видеоданных навигации по потенциальному пути.
[00266] В вариантах осуществления настоящего раскрытия при выполнении навигации вне помещения через видеоданные навигации по целевому пути навигация может быть выполнена более интуитивно, и порог навигации понижается; и при выполнении навигации внутри помещения опорная информация или текстовая информация, естественным образом существующая в месте внутри помещения, могут быть применены в качестве идентификационной точки, и навигация выполняется посредством идентификации опорной информации или текстовой информации в видеоданных навигации, чтобы определить видеоданные навигации по целевому пути на целевом пути, тем самым экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов. Кроме того, во время выполнения навигации при помощи видеоданных навигации по целевому пути, пользователь может судить, происходит ли отклонение в целевом пути, по которому в настоящее время перемещаются, определяя видеоданные навигации по целевому пути и фактический тракт в режиме реального времени, и если отклонение происходит, видеоданные навигации по целевому пути могут быть определены снова, который улучшает точность навигации.
[00267] Фиг. 4 является блок-схемой навигационного устройства в соответствии с иллюстративным вариантом осуществления. Как показано на фиг. 4, устройство включает в себя первый модуль 401 приема, первый модуль 402 сбора данных и первый модуль 403 отправки.
[00268] Первый модуль 401 приема выполнен с возможностью принимать информацию начальной точки и информацию конечной точки, отправленную целевым устройством.
[00269] Первый модуль 402 сбора данных выполнен с возможностью собирать видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, принятой первым модулем 401 приема.
[00270] Первый модуль 403 отправки выполнен с возможностью отправлять видеоданные навигации по целевому пути, собранные первым модулем 402 сбора данных, целевому устройству.
[00271] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 5, первый модуль 402 сбора данных включает в себя первый блок 4021 сбора данных.
[00272] Первый блок 4021 сбора данных выполнен с возможностью собирать видеоданные навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки, информация начальной точки включает в себя информацию позиции начальной точки, и информация конечной точки включает в себя информацию позиции конечной точки.
[00273] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 6, информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00274] первый блок 4021 сбора данных включает в себя: первый подблок 40211 извлечения, первый подблок 40212 определения и первый подблок 40213 сбора данных.
[00275] Первый подблок 40211 извлечения выполнен с возможностью извлекать опорную информацию начальной точки из изображения окружения начальной точки и извлекать опорную информацию конечной точки из изображения окружения конечной точки.
[00276] Первый подблок 40212 определения выполнен с возможностью определять опорную информацию начальной точки, извлеченную первым подблоком 40211 извлечения, как информацию позиции начальной точки и определять опорную информацию конечной точки, извлеченную первым подблоком 40211 извлечения, как информацию позиции конечной точки.
[00277] Первый подблок 40213 сбора выполнен с возможностью собирать видеоданные навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки, определенной первым подблоком 40212 определения.
[00278] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 7, информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00279] первый блок 4021 сбора данных включает в себя: второй подблок 40214 извлечения, второй подблок 40215 определения и второй подблок 40216 сбора.
[00280] Второй подблок 40214 извлечения выполнен с возможностью извлекать текстовую информацию начальной точки из изображения окружения начальной точки и извлекать текстовую информацию конечной точки из изображения окружения конечной точки.
[00281] Второй подблок 40215 определения выполнен с возможностью определять текстовую информацию начальной точки, извлеченную вторым подблоком 40214 извлечения, как информацию позиции начальной точки и определять текстовую информацию конечной точки, извлеченную вторым подблоком извлечения, как информацию позиции конечной точки.
[00282] Второй подблок 40216 сбора выполнен с возможностью собирать видеоданные навигации по целевому пути на основе текстовой информации начальной точки и текстовой информации конечной точки, определенной вторым подблоком 40215 определения.
[00283] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 8, первый модуль 402 сбора данных включает в себя: блок 4022 выделения.
[00284] Блок 4022 выделения выполнен с возможностью выделять видеоданные навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[00285] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 9, первый модуль 402 сбора данных включает в себя: второй блок 4023 сбора данных.
[00286] Второй блок 4023 сбора данных выполнен с возможностью собирать видеоданные навигации по целевому пути из множества сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[00287] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 10, устройство дополнительно включает в себя: второй модуль 404 сбора данных.
[00288] Второй модуль 404 сбора данных выполнен с возможностью собирать видеоданные навигации по потенциальному пути.
[00289] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 11, второй модуль 404 сбора данных включает в себя: третий блок 4041 сбора данных и блок 4042 привязки.
[00290] Третий блок 4041 сбора данных выполнен с возможностью собирать мобильные видеоданные и информацию позиции, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных.
[00291] Блок 4042 привязки выполнен с возможностью привязывать информацию позиции, собранную третьим блоком сбора данных, к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути.
[00292] В другом варианте осуществления настоящего раскрытия информация позиции включает в себя опорную информацию или текстовую информацию.
[00293] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 12, устройство дополнительно включает в себя: второй модуль 405 приема, третий модуль 406 сбора данных и второй модуль 407 отправки.
[00294] Второй модуль 405 приема выполнен с возможностью принимать запрос перепланирования пути, отправленный целевым устройством.
[00295] Третий модуль 406 сбора данных выполнен с возможностью собирать новые видеоданные навигации по целевому пути на основе запроса перепланирования пути, принятого вторым модулем 405 приема.
[00296] Второй модуль 407 отправки выполнен с возможностью отправлять новые видеоданные навигации по целевому пути, собранные третьим модулем 406 сбора данных, целевому устройству, в результате чего целевое устройство выполняет навигацию на основе новых видеоданных навигации по целевому пути.
[00297] В вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00298] Что касается устройств в упомянутых выше вариантах осуществления, заданные методы выполнения операций для индивидуальных модулей были подробно описаны в вариантах осуществления относительно способов, которые не будут подробно прорабатываться в настоящем документе.
[00299] Фиг. 13 является блок-схемой навигационного устройства в соответствии с иллюстративным вариантом осуществления. Как показано на фиг. 13, устройство включает в себя: первый модуль 1301 сбора данных, первый модуль 1302 отправки, модуль 1303 приема и модуль 1304 широковещания.
[00300] Первый модуль 1301 сбора данных выполнен с возможностью собирать информацию начальной точки и информацию конечной точки.
[00301] Первый модуль 1302 отправки выполнен с возможностью отправлять информацию начальной точки и информацию конечной точки, собранную первым модулем 130 сбора данных, на сервер.
[00302] Модуль 1303 приема выполнен с возможностью принимать видеоданные навигации по целевому пути от начальной точки до конечной точки, отправленные сервером, видеоданные навигации по целевому пути собираются сервером на основе информации начальной точки и информации конечной точки, отправленной первым модулем 1302 отправки.
[00303] Модуль 1304 широковещания выполнен с возможностью в ответ на принятую операцию инициирования навигации широковещательно передавать видеоданные навигации по целевому пути, принятые модулем 1303 приема.
[00304] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 14, первый модуль 1301 сбора данных включает в себя: блок 13011 сбора данных.
[00305] Блок 13011 сбора данных выполнен с возможностью при приеме команды навигации собирать данные изображения окружения начальной точки и изображения окружения конечной точки.
[00306] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 15, модуль 1304 широковещания включает в себя: блок 13041 обнаружения и блок 13042 широковещания.
[00307] Блок обнаружения 13041 выполнен с возможностью обнаруживать текущую скорость перемещения.
[00308] Блок 13042 широковещания выполнен с возможностью широковещательно передавать видеоданные навигации по целевому пути на основе скорости перемещения, обнаруженной блоком обнаружения, в результате чего скорость широковещательной передачи видеоданных навигации по целевому пути равна скорости перемещения.
[00309] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 16, модуль широковещания включает в себя: блок 13043 отображения и блок 13044 отправки.
[00310] Блок 13043 отображения выполнен с возможностью отображать информацию запроса подтверждения маршрута, когда широковещательно передается позиция целевого изображения в видеоданных навигации по целевому пути, информация запроса подтверждения маршрута выполнена с возможностью предлагать пользователю подтвердить, происходит ли отклонение от целевого пути.
[00311] Блок 13044 отправки выполнен с возможностью при приеме команды перепланирования маршрута на основе информации запроса подтверждения маршрута, отображенной блоком отображения, отправлять запрос перепланирования маршрута на сервер, в результате чего сервер собирает новые видеоданные навигации по целевому пути на основе запроса перепланирования маршрута.
[00312] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 17, устройство дополнительно включает в себя: второй модуль 1305 сбора данных и второй модуль 1306 отправки.
[00313] Второй модуль 1305 сбора данных выполнен с возможностью собирать мобильные видеоданные и информацию позиции.
[00314] Второй модуль 1306 отправки выполнен с возможностью отправлять мобильные видеоданные и информацию позиции, собранные вторым модулем сбора данных, на сервер, в результате чего сервер привязывает мобильные видеоданные к целевому изображению, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному в стационарном состоянии во время захвата мобильных видеоданных.
[00315] В другом варианте осуществления настоящего раскрытия, как показано на фиг. 18, устройство дополнительно включает в себя: третий модуль 1307 сбора данных, модуль 1308 привязки и третий модуль 1309 отправки.
[00316] Третий модуль 1307 сбора данных выполнен с возможностью собирать мобильные видеоданные и информацию позиции.
[00317] Модуль 1308 привязки выполнен с возможностью привязывать мобильные видеоданные, собранные третьим модулем сбора данных, к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному в стационарном состоянии во время захвата мобильных видеоданных.
[00318] Третий модуль 1309 отправки выполнен с возможностью отправлять видеоданные навигации по потенциальному пути, полученные посредством привязки модулем привязки, на сервер.
[00319] В вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00320] Что касается устройств в упомянутых выше вариантах осуществления, заданные методы выполнения операций для индивидуальных модулей были подробно описаны в вариантах осуществления относительно способов, которые не будут подробно прорабатываться в настоящем документе.
[00321] Фиг. 19 является блок-схемой 1900 устройства для навигации в соответствии с иллюстративным вариантом осуществления. Например, устройство 1900 может быть обеспечено как сервер. Согласно фиг. 19 устройство 1900 включает в себя компонент 1922 обработки, который дополнительно включает в себя один или более процессоров, и ресурсы памяти, представленные памятью 1932, для хранения команд, исполняемых компонентом 1922 обработки, таких как прикладные программы. Прикладные программы, хранящиеся в памяти 1932, могут включать в себя один или несколько модулей, каждый из которых соответствует множеству команд. Устройство 1900 также может включать в себя компонент 1926 электропитания, выполненный с возможностью выполнять управление электропитанием устройства 1900, проводной или беспроводной сетевой интерфейс (интерфейсы) 1950, выполненные с возможностью соединять устройство 1900 с сетью, и интерфейс 1958 ввода/вывода (I/O). Устройство 1900 может работать на основе операционной системы, хранящейся в памяти 1932, такой как Windows ServerТМ, Mac OS XТМ, UnixТМ, LinuxТМ, FreeBSDТМ и т.п.
[00322] Кроме того, компонент 1922 обработки выполнен с возможностью исполнять команды, чтобы выполнить следующий способ навигации, включающий в себя:
[00323] прием информации начальной точки и информации конечной точки, отправленной целевым устройством;
[00324] сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки; и
[00325] отправку видеоданных навигации по целевому пути целевому устройству.
[00326] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[00327] сбор видеоданных навигации по целевому пути на основе информации позиции начальной точки и информации позиции конечной точки, информация начальной точки включает в себя информацию позиции начальной точки, и информация конечной точки включает в себя информацию позиции конечной точки.
[00328] В другом варианте осуществления настоящего раскрытия информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00329] сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки включает в себя:
[00330] извлечение опорной информации начальной точки из изображения окружения начальной точки и извлечение опорной информации конечной точки из изображения окружения конечной точки;
[00331] определение опорной информации начальной точки как информации позиции начальной точки и определение опорной информации конечной точки как информации позиции конечной точки; и
[00332] сбор видеоданных навигации по целевому пути на основе опорной информации начальной точки и опорной информации конечной точки.
[00333] В другом варианте осуществления настоящего раскрытия информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00334] сбор видеоданных навигации по целевому пути на основе информации начальной точки и информации конечной точки включает в себя:
[00335] извлечение текстовой информации начальной точки из изображения окружения начальной точки и извлечение текстовой информации конечной точки из изображения окружения конечной точки;
[00336] определение текстовой информации начальной точки как информации позиции начальной точки и определение текстовой информации конечной точки как информации позиции конечной точки; и
[00337] сбор видеоданных навигации по целевому пути на основе текстовой информации начальной точки и текстовой информации конечной точки.
[00338] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[00339] выделение видеоданных навигации по целевому пути из сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[00340] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки включает в себя:
[00341] сбор видеоданных навигации по целевому пути из множества сохраненных видеоданных навигации по потенциальному пути на основе информации начальной точки и информации конечной точки.
[00342] В другом варианте осуществления настоящего раскрытия перед сбором видеоданных навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки способ дополнительно включает в себя:
[00343] сбор видеоданных навигации по потенциальному пути.
[00344] В другом варианте осуществления настоящего раскрытия сбор видеоданных навигации по потенциальному пути включает в себя:
[00345] сбор мобильных видеоданных и информации позиции, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[00346] привязку информации позиции к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути.
[00347] В другом варианте осуществления настоящего раскрытия информация позиции включает в себя опорную информацию или текстовую информацию.
[00348] В другом варианте осуществления настоящего раскрытия после отправки видеоданных навигации по целевому пути целевому устройству способ дополнительно включает в себя:
[00349] прием запроса перепланирования пути, отправленного целевым устройством;
[00350] сбор новых видеоданных навигации по целевому пути на основе запроса перепланирования пути; и
[00351] отправку новых видеоданных навигации по целевому пути целевому устройству, в результате чего целевое устройство выполняет навигацию на основе новых видеоданных навигации по целевому пути.
[00352] В вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00353] Фиг. 20 является блок-схемой устройства 2000 для навигации в соответствии с иллюстративным вариантом осуществления. Например, устройство 2000 может представлять собой мобильный телефон, компьютер, терминал цифрового вещания, устройство обмена сообщениями, игровую консоль, планшет, медицинское устройство, тренажерное оборудование, карманный персональный компьютер, интеллектуальные очки, интеллектуальные часы и т.п.
[00354] Согласно фиг. 20 устройство 2000 может включать в себя один или более следующих компонентов: компонент 2002 обработки, память 2004, компонент 2006 электропитания, мультимедийный компонент 2008, звуковой компонент 2010, интерфейс 2012 ввода/вывода (I/O), компонент 2014 датчика и компонент 2016 связи.
[00355] Компонент 2002 обработки обычно управляет всеми операциями устройства 2000, такими как операции, связанные с отображением, телефонными вызовами, передачей данных, операции камеры и операции записи. Компонент 2002 обработки может включать в себя один или несколько процессоров 2020 для исполнения команд для выполнения всех или части этапов в описанных выше способах. Кроме того, компонент 2002 обработки может включать в себя один или несколько модулей, которые обеспечивают возможность взаимодействия между компонентом 2002 обработки и другими компонентами. Например, компонент 2002 обработки может включать в себя мультимедийный модуль для обеспечения возможности взаимодействия между мультимедийным компонентом 2008 и компонентом 2002 обработки.
[00356] Память 2004 выполнена с возможностью хранить различные типы данных для поддержки работы устройства 2000. Примеры таких данных включают в себя команды для любых приложений или способов, работающих на устройстве 2000, контактные данные, данные телефонной книги, сообщения, изображения, видеоданные и т.д. Память 2004 может быть реализована с использованием устройств энергозависимой или энергонезависимой памяти любого типа или их комбинации, таких как статическое оперативное запоминающее устройство (СОЗУ; SRAM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ; EEPROM), стираемое программируемое постоянное запоминающее устройство (СППЗУ; EPROM), программируемое постоянное запоминающее устройство (ППЗУ), постоянное запоминающее устройство (ПЗУ), магнитная память, флэш-память, магнитный или оптический диск.
[00357] Компонент 2006 электропитания обеспечивает электропитание различным компонентам устройства 2000. Компонент 2006 электропитания может включать в себя систему управления питанием, один или несколько источников питания и любые другие компоненты, связанные с генерированием, управлением и распределением электропитания в устройстве 2000.
[00358] Мультимедийный компонент 2008 включает в себя экран, обеспечивающий интерфейс вывода между устройством 2000 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель включает в себя один или более сенсорных датчиков для восприятия прикосновений, скольжений и жестов на сенсорной панели. Сенсорные датчики могут воспринимать не только границу прикосновения или действие скольжения, но также воспринимать промежуток времени и давление, связанные с прикосновением или действием скольжения. В некоторых вариантах осуществления мультимедийный компонент 2008 включает в себя фронтальную камеру и/или камеру заднего вида. Фронтальная камера и/или камера заднего вида могут принимать внешние мультимедийные данные, в то время как устройство 2000 находится в режиме работы, таком как режим фотографирования или режим видео. Каждая камера из фронтальной камеры и камеры заднего вида может являться системой с фиксированной оптической линзой или иметь возможность фокусировки и оптического масштабирования.
[00359] Звуковой компонент 2010 выполнен с возможностью выводить и/или вводить звуковые сигналы. Например, звуковой компонент 2010 включает в себя микрофон (MIC), выполненный с возможностью принимать внешний звуковой сигнал, когда устройство 2000 находится в режиме работы, таком как режим вызова, режим записи и режим распознавания речи. Принятый звуковой сигнал затем может быть сохранен в памяти 2004 или передан через компонент 2016 связи. В некоторых вариантах осуществления звуковой компонент 2010 дополнительно включает в себя динамик для вывода звуковых сигналов.
[00360] Интерфейс 2012 ввода/вывода обеспечивает интерфейс между компонентом 2002 обработки и модулями периферийного интерфейса, такими как клавиатура, круг с кнопками, кнопки и т.п. Кнопки могут включать в себя, но без ограничения, кнопку возврата на домашнюю страницу, кнопку громкости, кнопку запуска и кнопку блокировки.
[00361] Компонент 2014 датчика включает в себя один или более датчиков для обеспечения оценки статуса различных аспектов устройства 2000. Например, компонент 2014 датчика может обнаружить открытый/закрытый статус устройства 2000, относительное расположение компонентов, например, дисплея и кнопочной панели устройства 2000, изменение позиции устройства 2000 или компонента устройства 2000, присутствие или отсутствие контакта пользователя с устройством 2000, ориентацию или ускорение/замедление устройства 2000 и изменение температуры устройства 2000. Компонент 2014 датчика может включать в себя датчик близости, выполненный с возможностью обнаруживать присутствие находящихся рядом объектов без физического контакта. Компонент 2014 датчика также может включать в себя светочувствительный датчик, такой как датчик изображений на комплементарных металлооксидных полупроводниках (КМОП; CMOS) или на приборах с зарядовой связью (ПЗС; CCD), для использования в приложениях обработки изображений. В некоторых вариантах осуществления компонент 2014 датчика также может включать в себя акселерометр, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00362] Компонент 2016 связи выполнен с возможностью обеспечивать проводную или беспроводную связь между устройством 2000 и другими устройствами. Устройство 2000 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G или 3G, или их комбинации. В одном иллюстративном варианте осуществления компонент 2016 связи принимает сигнал вещания или информацию широковещательной передачи от внешней системы управления широковещательной передачи через канал широковещания. В одном иллюстративном варианте осуществления компонент 2016 связи дополнительно включает в себя модуль связи малого радиуса действия (NFC), чтобы обеспечить возможность ближней связи. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), технологии ультраширокополосной передачи (UWB), технологии Bluetooth (BT) и других технологий.
[00363] В иллюстративных вариантах осуществления устройство 2000 может быть реализовано с помощью одной или более специализированных интегральных схем (СИС; ASIC), процессоров цифровой обработки сигналов (ПЦОС; DSP), устройств цифровой обработки сигналов (УЦОС; DSPD), программируемых логических интегральных схем (ПЛИС; PLD), программируемых пользователем вентильных матриц (ППВМ; FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для выполнения описанных выше способов.
[00364] В иллюстративных вариантах осуществления также обеспечен постоянный машиночитаемый запоминающий носитель, включающий в себя команды, как память 2004, включающая в себя команды, причем упомянутые выше команды являются исполняемыми процессором 2020 в устройстве 2000 для выполнения описанных выше способов. Например, постоянный машиночитаемый запоминающий носитель может представлять собой ПЗУ, ОЗУ, компакт-диск только для чтения (CD-ROM), магнитную ленту, гибкий диск, оптическое устройство хранения данных и т.п.
[00365] Постоянный машиночитаемый запоминающий носитель, когда команды в запоминающем носителе исполняются процессором целевого устройства, предписывает целевому устройству выполнять способ навигации, при этом способ включает в себя:
[00366] сбор информации начальной точки и информации конечной точки;
[00367] отправку информации начальной точки и информации конечной точки на сервер; и
[00368] прием видеоданных навигации по целевому пути от начальной точки до конечной точки, отправленных сервером, видеоданные навигации по целевому пути собраны сервером на основе информации начальной точки и информации конечной точки.
[00369] В другом варианте осуществления настоящего раскрытия информация начальной точки включает в себя изображение окружения начальной точки, и информация конечной точки включает в себя изображение окружения конечной точки; и
[00370] сбор информации начальной точки и информации конечной точки включает в себя:
[00371] при приеме команды навигации сбор данных изображения окружения начальной точки и изображения окружения конечной точки.
[00372] В другом варианте осуществления настоящего раскрытия широковещательная передача видеоданных навигации по целевому пути включает в себя:
[00373] обнаружение текущей скорости перемещения; и
[00374] широковещательную передачу видеоданных навигации по целевому пути на основе скорости перемещения, в результате чего скорость широковещательной передачи видеоданных навигации по целевому пути равна скорости перемещения.
[00375] В другом варианте осуществления настоящего раскрытия широковещательная передача видеоданных навигации по целевому пути включает в себя:
[00376] когда широковещательно передается позиция целевого изображения в видеоданных навигации по целевому пути, отображение информации запроса подтверждения маршрута, информация запроса подтверждения маршрута выполнена с возможностью предлагать пользователю подтвердить, происходит ли отклонение от целевого пути, информация позиции представляет собой информацию позиции, соответствующую целевому изображению, захваченному устройством захвата видеоданных, находящимся в стационарном состоянии во время захвата мобильных видеоданных; и
[00377] при приеме команды перепланирования маршрута на основе информации запроса подтверждения маршрута отправку запроса перепланирования маршрута на сервер, в результате чего сервер собирает новые видеоданные навигации по целевому пути на основе запроса перепланирования маршрута.
[00378] В другом варианте осуществления настоящего раскрытия способ дополнительно включает в себя:
[00379] сбор мобильных видеоданных и информации позиции; и
[00380] отправку мобильных видеоданных и информации позиции на сервер, в результате чего сервер привязывает мобильные видеоданные к целевому изображению.
[00381] В другом варианте осуществления настоящего раскрытия способ дополнительно включает в себя:
[00382] сбор мобильных видеоданных и информации позиции;
[00383] привязку мобильных видеоданных к целевому изображению, чтобы получить видеоданные навигации по потенциальному пути; и
[00384] отправку видеоданных навигации по потенциальному пути на сервер.
[00385] В вариантах осуществления настоящего раскрытия принимается информация начальной точки и информация конечной точки, отправленная целевым устройством, собираются видеоданные навигации по целевому пути от начальной точки до конечной точки на основе информации начальной точки и информации конечной точки, и видеоданные навигации по целевому пути отправляются целевому устройству, в результате чего целевое устройство выполняет навигацию на основе видеоданных навигации по целевому пути, таким образом, экономится устанавливаемый вручную однородный инфракрасный датчик, достигается большая универсальность и применимость, и экономится множество физических устройств и трудовых ресурсов.
[00386] Другие варианты осуществления изобретения будут очевидны для специалистов в области техники на основе рассмотрения описания и практического применения раскрытого в настоящем документе изобретения. Предполагается, что эта заявка охватывает любые изменения, употребления или адаптации изобретения, которые следуют его общим принципам и включают в себя такие отклонения от настоящего раскрытия, которые согласуются с известной или обычной практикой применения в области техники. Предполагается, что описание и примеры будут рассматриваться лишь как иллюстративные, а истинные объем и сущность изобретения обозначены посредством последующей формулы изобретения.
[00387] Очевидно, что настоящее изобретение не ограничено точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны без отступления от его объема. Предполагается, что объем изобретения должен быть ограничен только приложенной формулой изобретения.
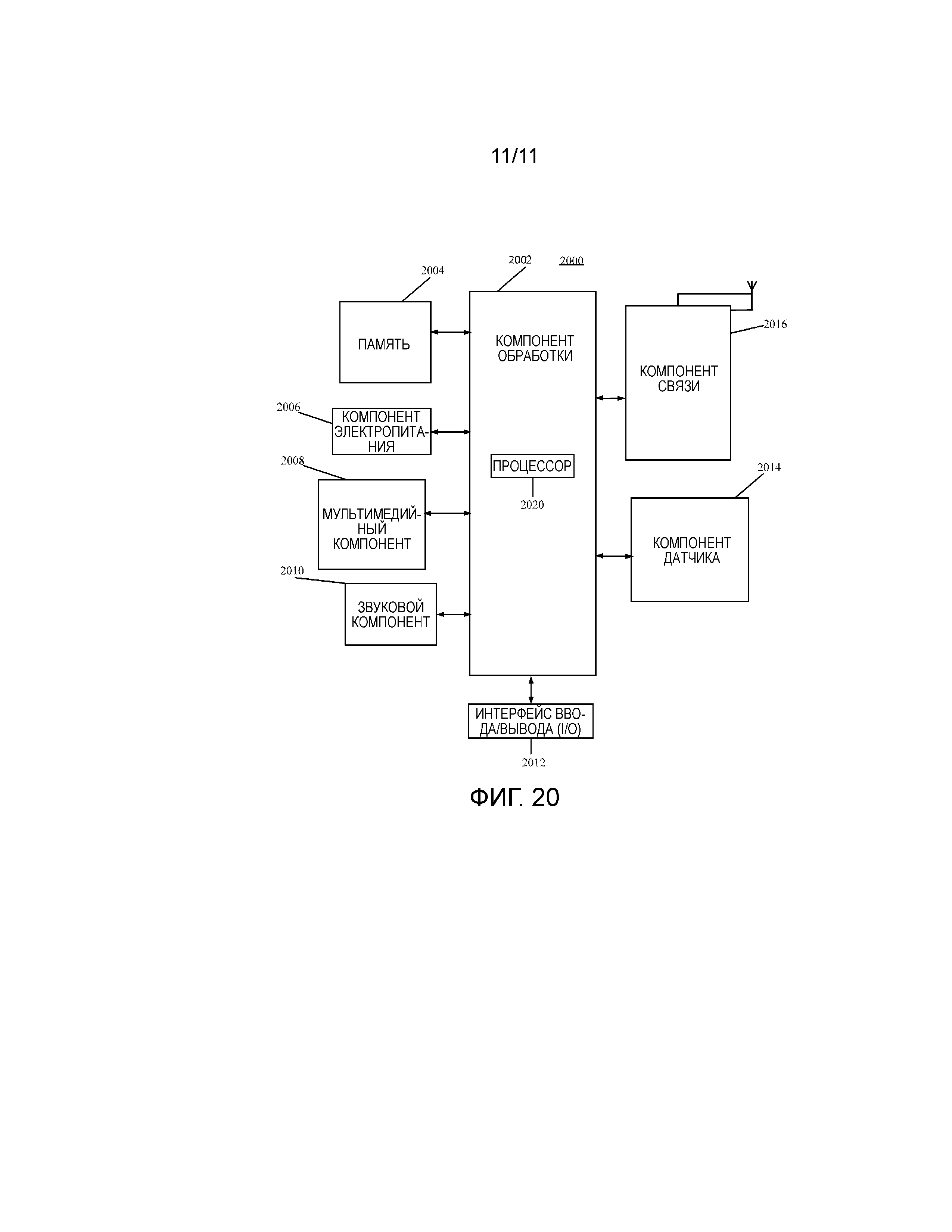
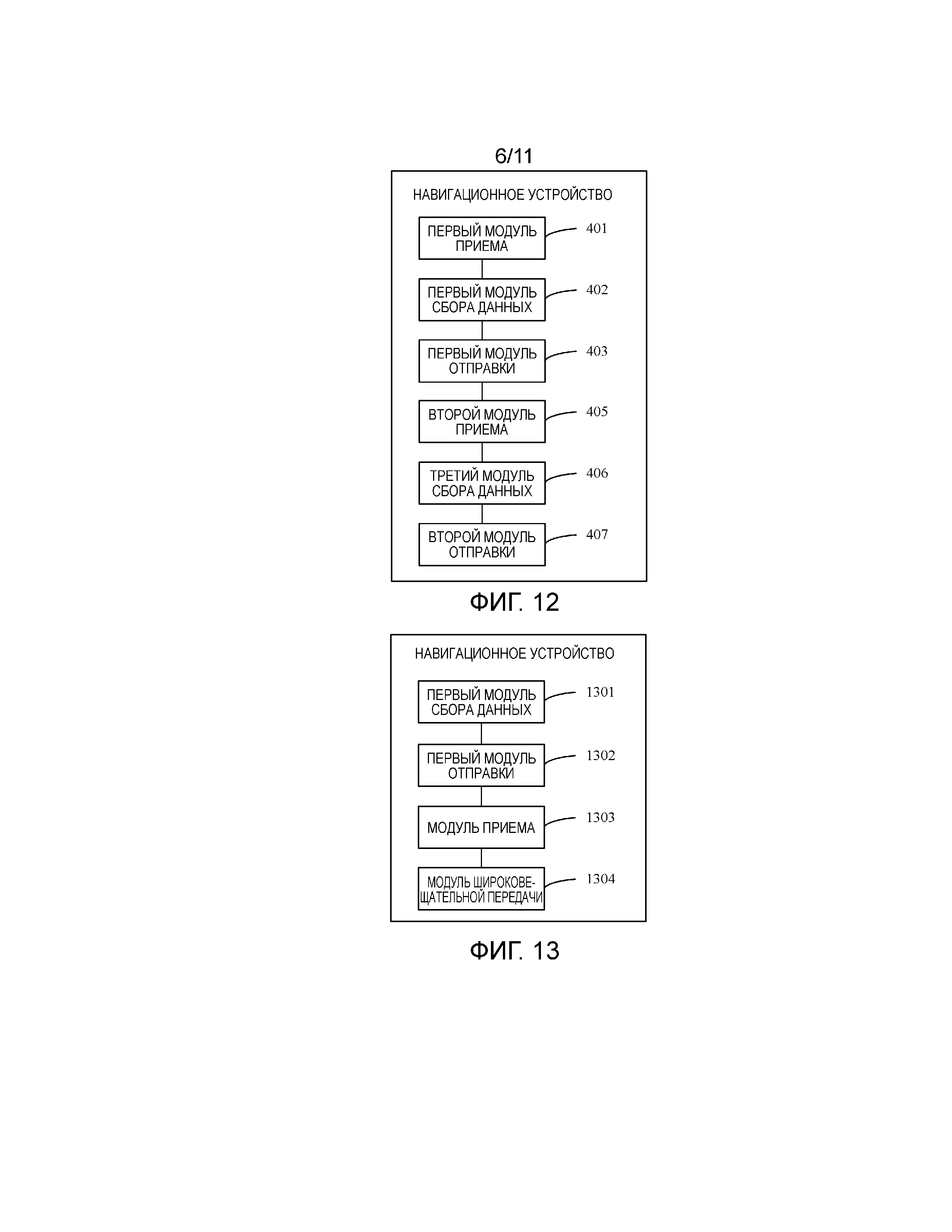
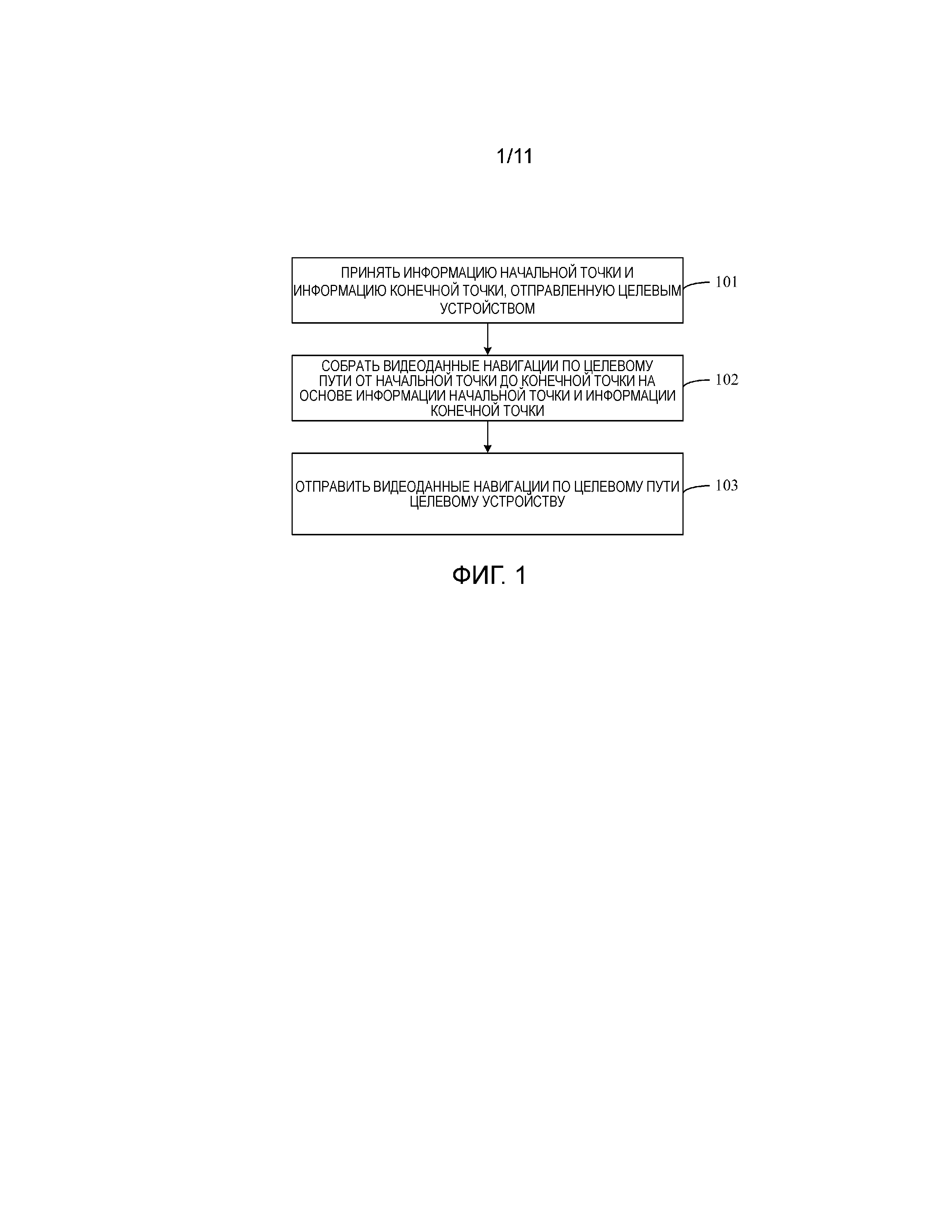
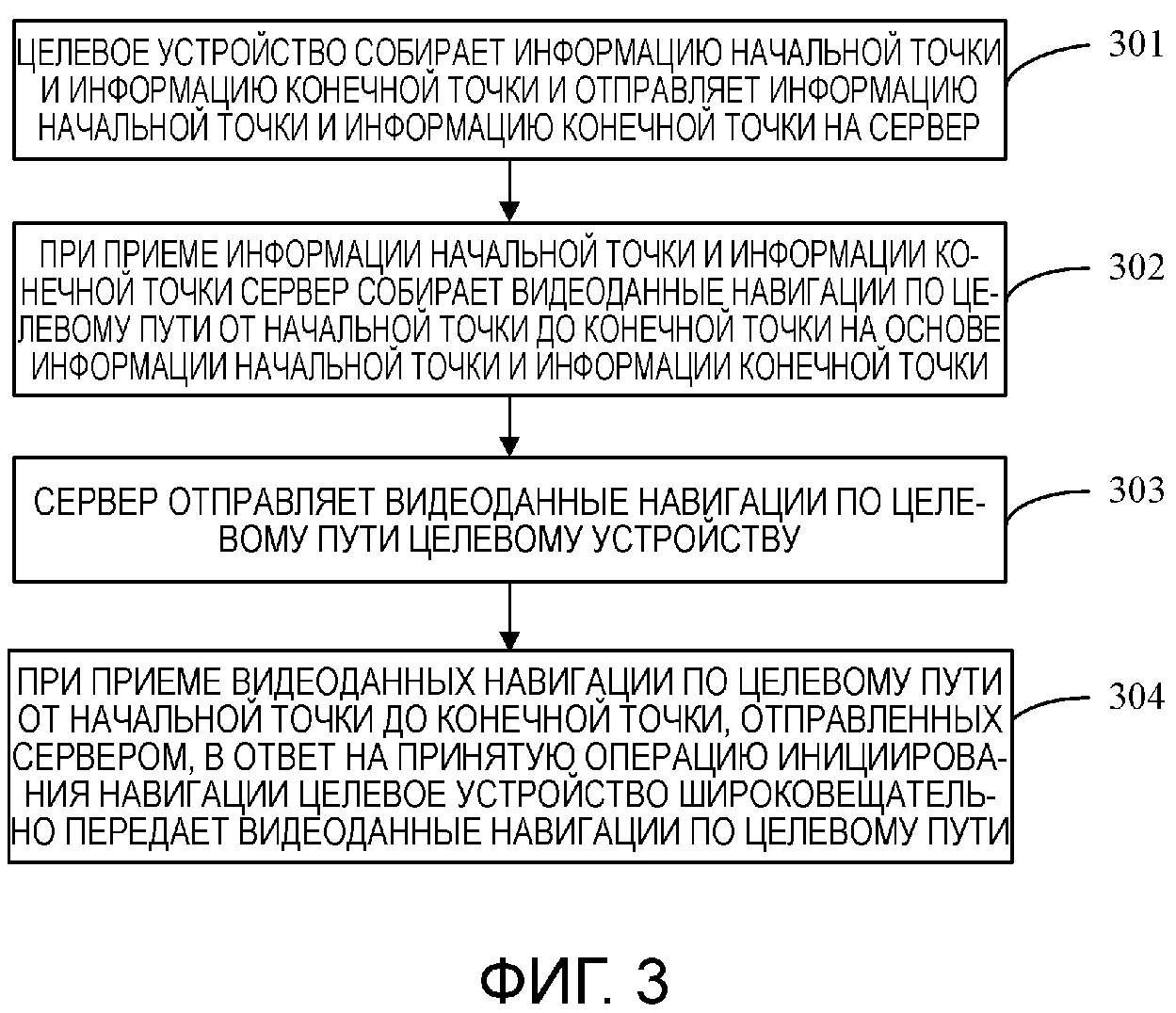
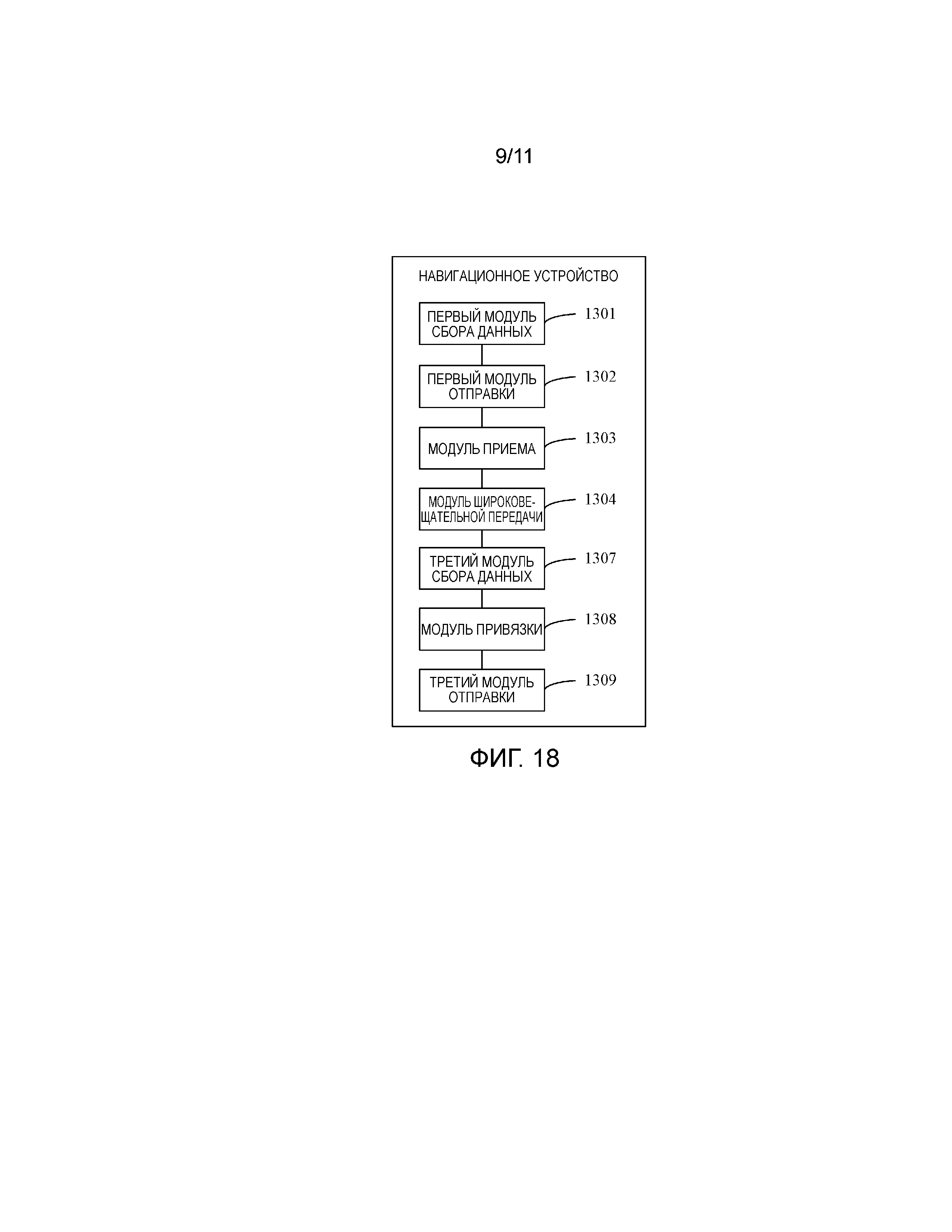
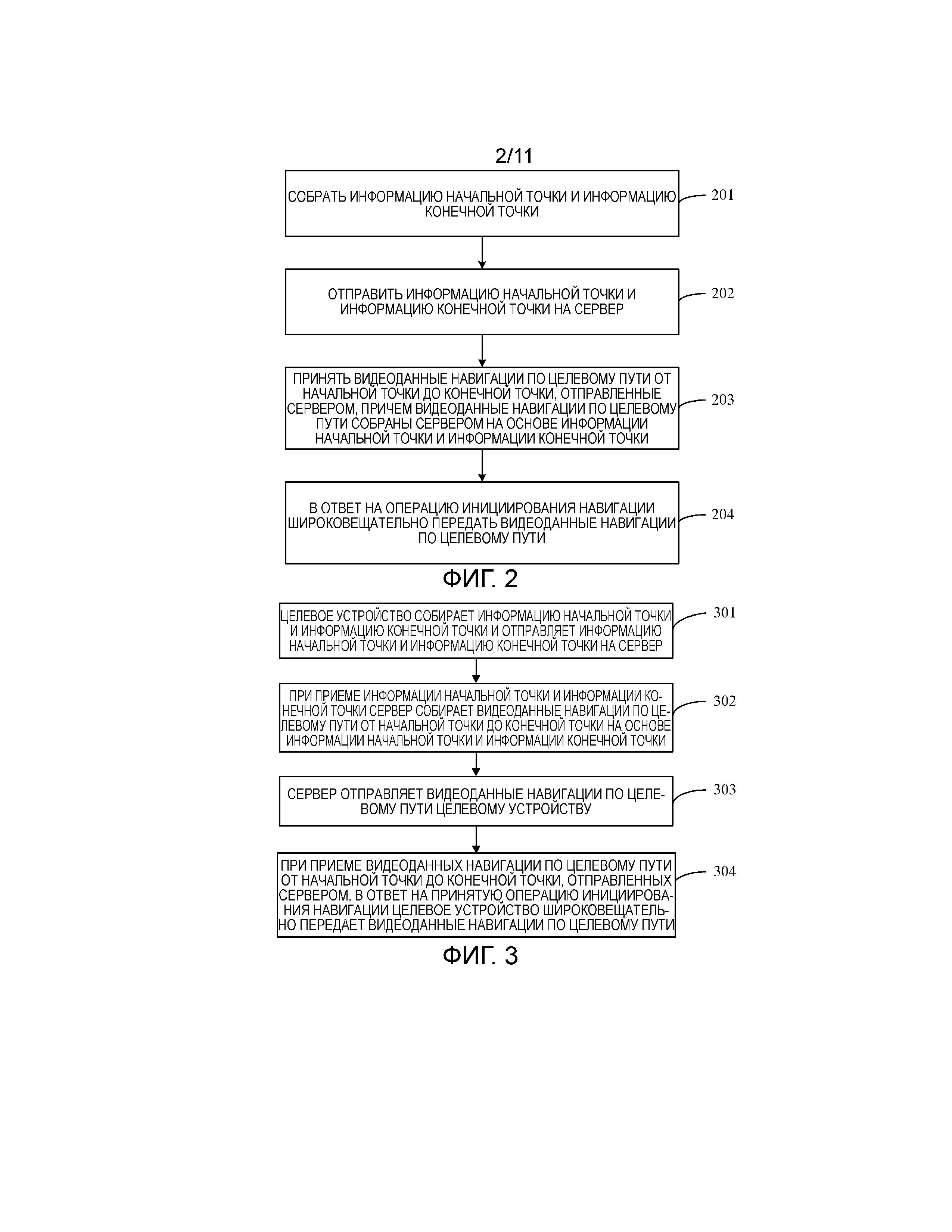
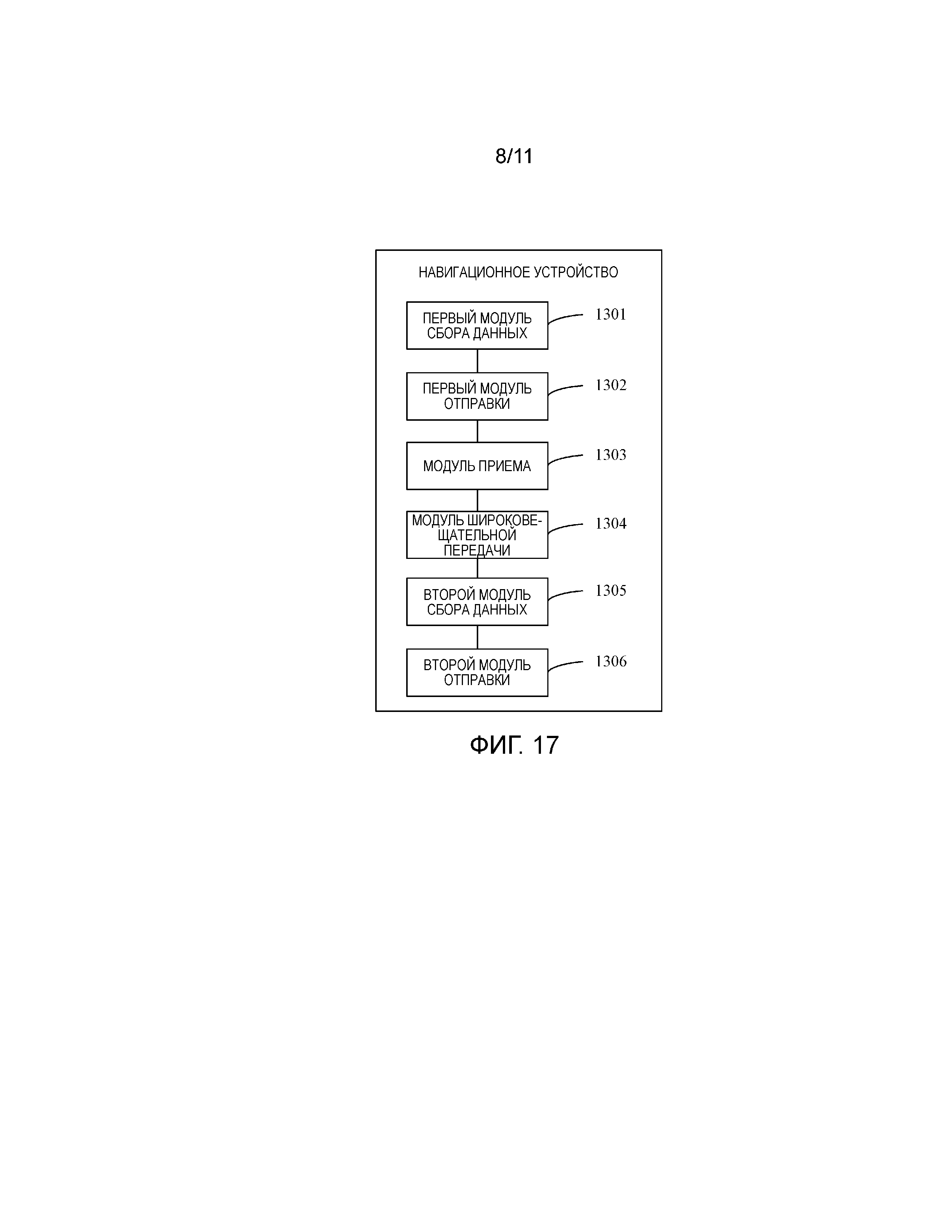
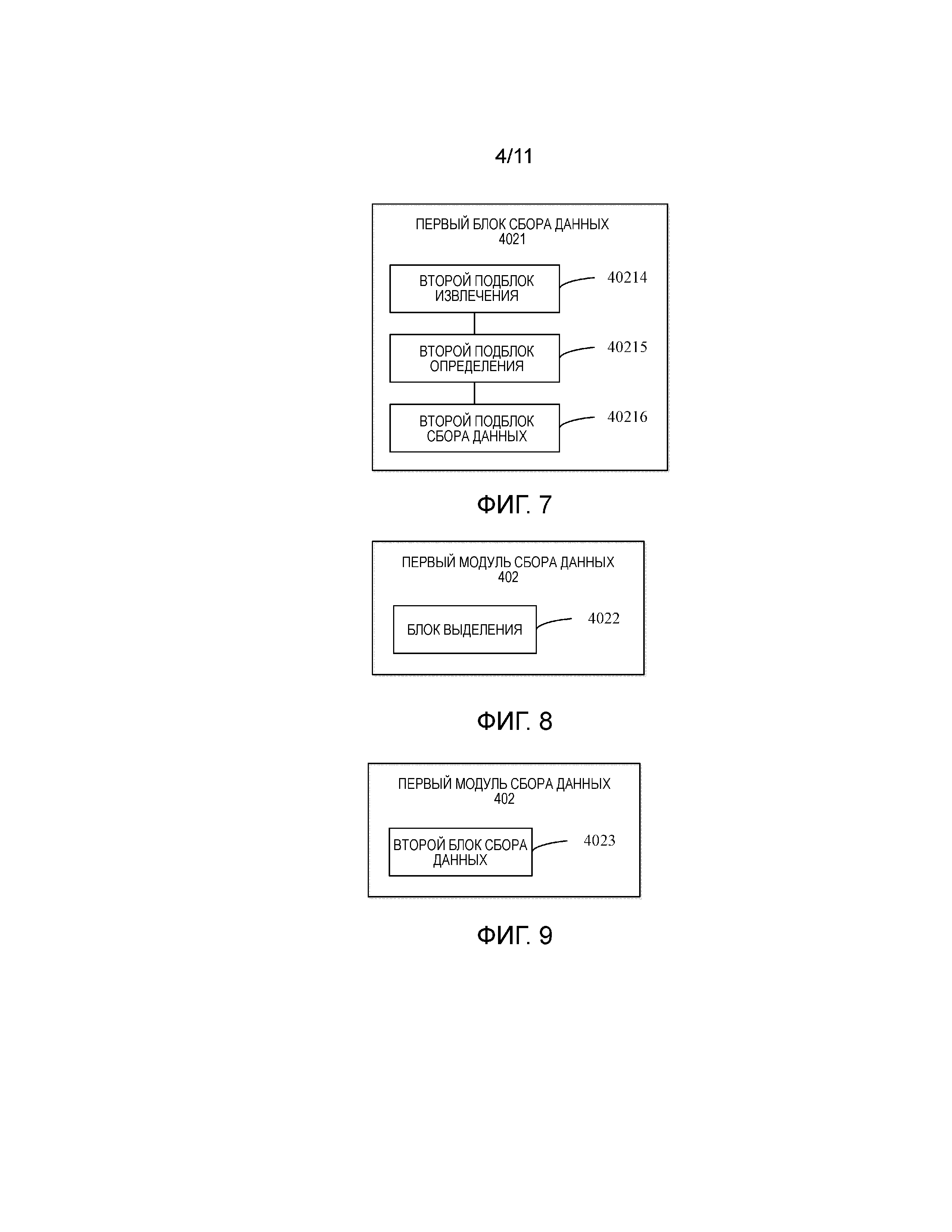
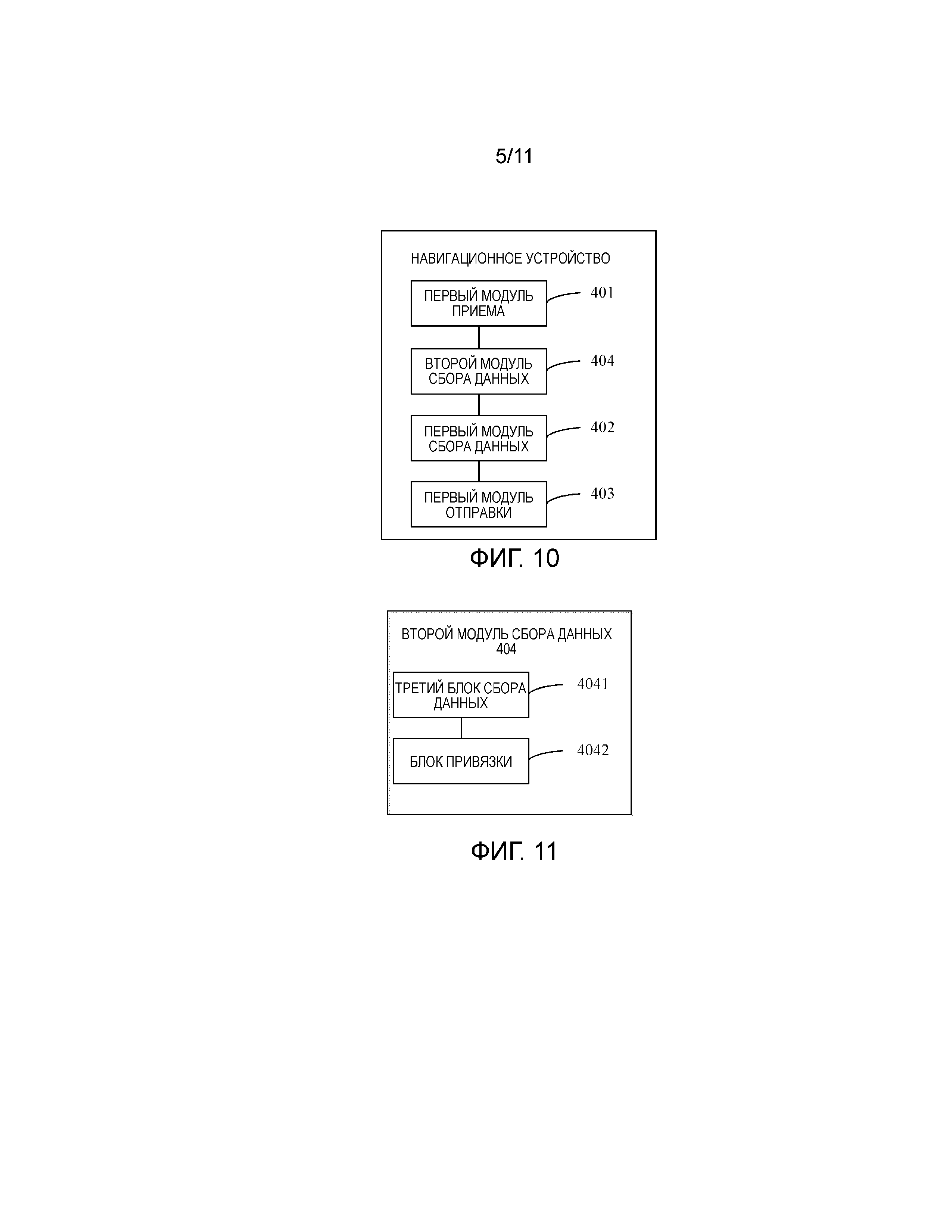
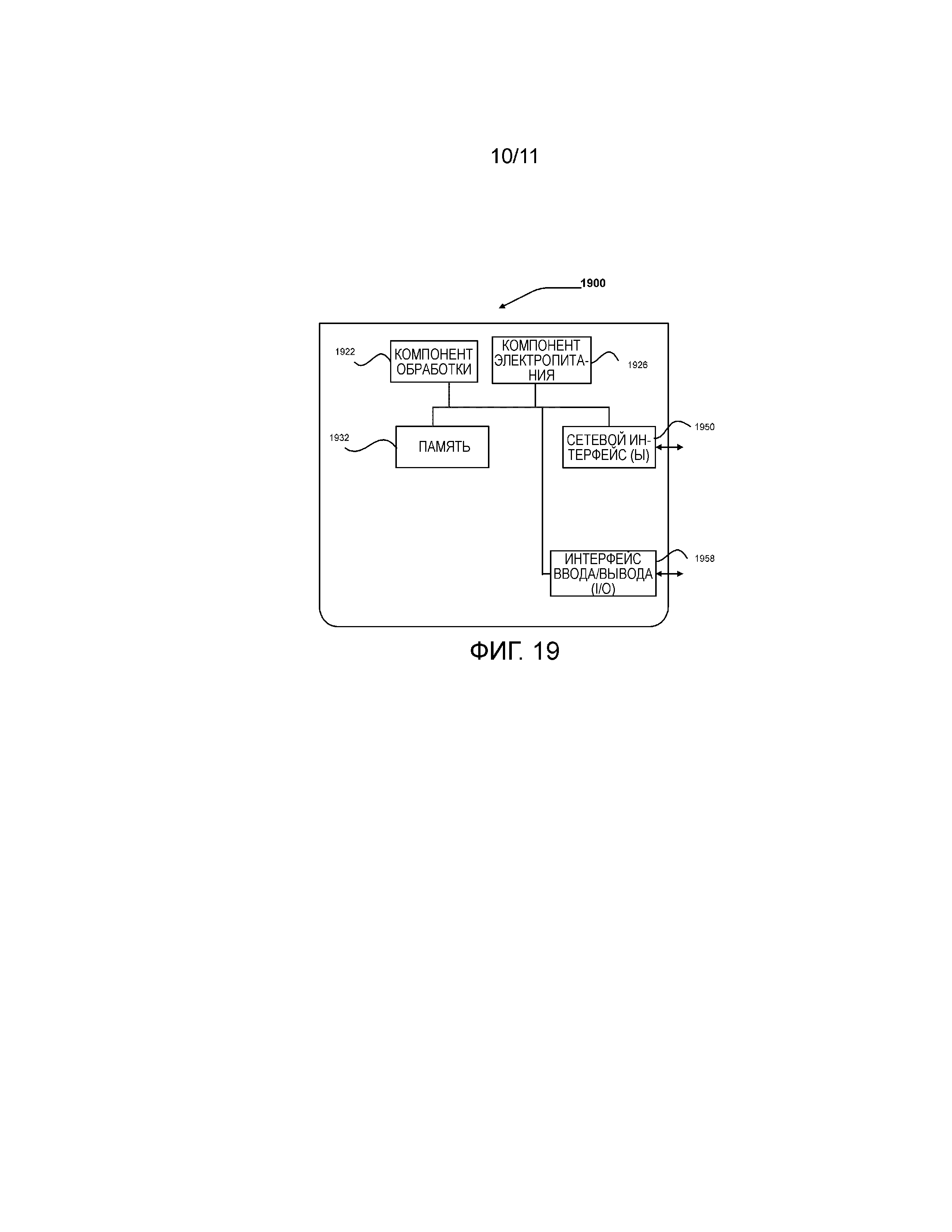
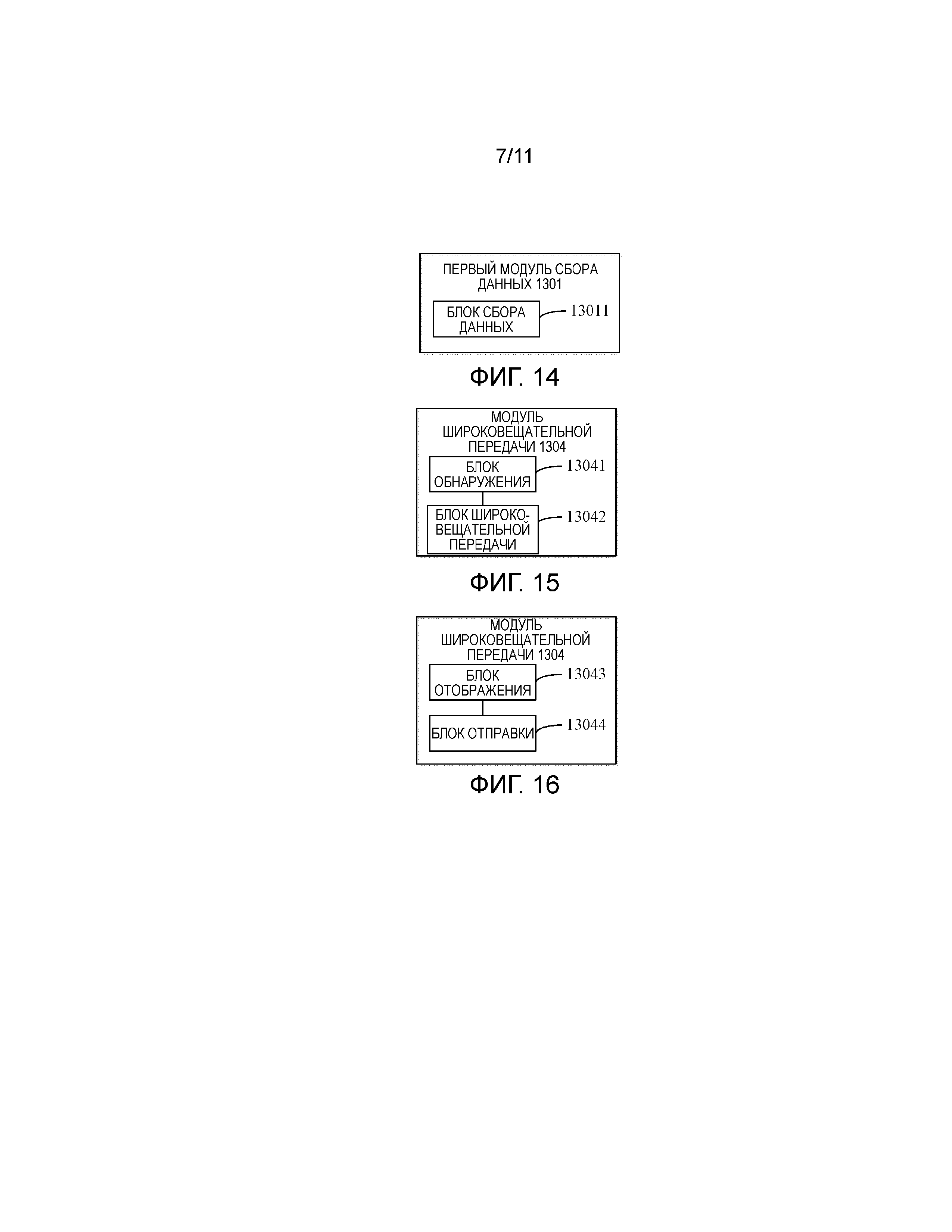
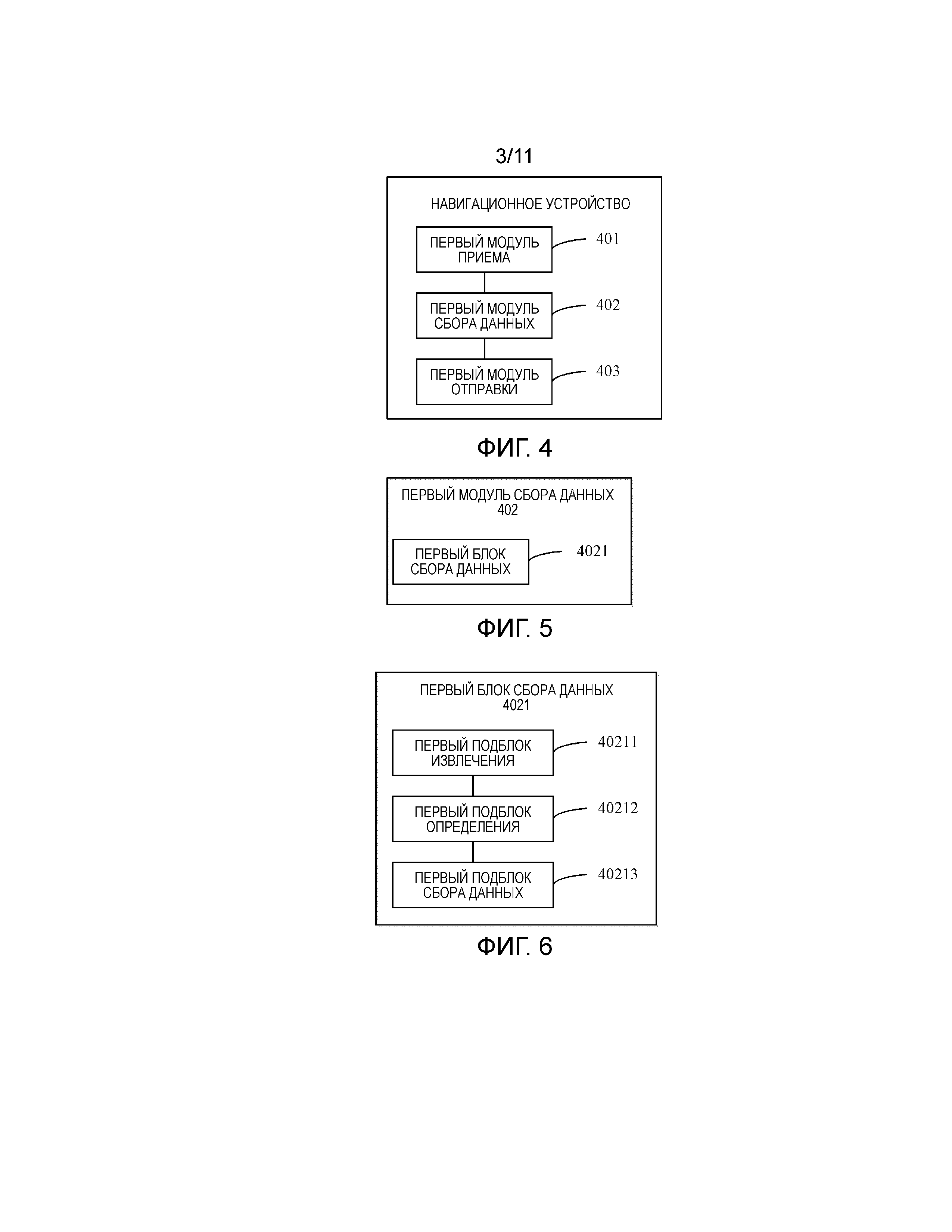
Способ и устройство для отображения информации уведомления
Способ, устройство и система для подсчета расхода электроэнергии
Способ и устройство для управления мгновенным сообщением
Способ и устройство для получения информации
Способ и устройство для блокировки файла
Способ и устройство для отображения изображения
Способ и устройство для управления полномочиями
Способ и устройство для обработки идентификатора видеофайла
Способ, устройство и система для установления беспроводного сетевого соединения
Способ и оборудование для управления устройством
Способ и устройство для отображения информации уведомления
Способ, устройство и система для подсчета расхода электроэнергии
Способ и устройство для управления мгновенным сообщением
Способ и устройство для получения информации
Способ и устройство для блокировки файла
Способ и устройство для отображения изображения
Способ и устройство для управления полномочиями
Способ и устройство для обработки идентификатора видеофайла
Способ, устройство и система для установления беспроводного сетевого соединения
Способ и оборудование для управления устройством

