Результат интеллектуальной деятельности: Способ коррекции бесплатформенной инерциальной навигационной системы
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной навигационной инерциальной системы путем создания способа непрерывной автономной коррекции углов курса, тангажа и крена подвижного объекта.
Традиционно углы ориентации вычисляют путем пересчета показаний датчиков угловых скоростей (ДУС) ωх, ωу, ωz в угловые скорости  ,
,  ,
,  с последующим их интегрированием. Недостатком такой системы является накапливаемая во времени погрешность и, как следствие, ограниченное время работы. Для устранения указанного недостатка в систему необходимо вводить дополнительную информацию, характеризующую угловую ориентацию БПЛА. Источниками такой информации служат датчики линейного ускорения (ДЛУ) и магнитометрические датчики. Основные погрешности данной системы возникают в результате действия постоянных или медленно меняющихся ускорений, нестабильности напряженности магнитного поля Земли и из-за наличия девиации в измерениях магнитного курса. В настоящий момент данная проблема решается путем отключения коррекции на высокоманевренных участках полета или путем комплексирования с другими системами ориентации, а также использованием различных трудоемких способов списания девиации.
с последующим их интегрированием. Недостатком такой системы является накапливаемая во времени погрешность и, как следствие, ограниченное время работы. Для устранения указанного недостатка в систему необходимо вводить дополнительную информацию, характеризующую угловую ориентацию БПЛА. Источниками такой информации служат датчики линейного ускорения (ДЛУ) и магнитометрические датчики. Основные погрешности данной системы возникают в результате действия постоянных или медленно меняющихся ускорений, нестабильности напряженности магнитного поля Земли и из-за наличия девиации в измерениях магнитного курса. В настоящий момент данная проблема решается путем отключения коррекции на высокоманевренных участках полета или путем комплексирования с другими системами ориентации, а также использованием различных трудоемких способов списания девиации.
Проблема коррекции бесплатформенных инерциальных навигационных систем (БИНС) по курсу заключается в том, что из-за замены съемного оборудования или смены груза может возникать необходимость списания девиации перед каждым вылетом. А коррекция углов крена и тангажа затруднена тем, что при маневрировании ЛА моменты времени, когда статические оценки крена и тангажа обладают достаточной точностью, могут возникать недопустимо редко. В связи с этим предлагается способ адаптивной коррекции углов курса, крена и тангажа, в котором коррекция выполняется непрерывно.
Известен способ измерения магнитного курса подвижного объекта патент №2130588, МПК 7 G01C 21/00, опубл. 20.05.1999 г.
Способ используется в навигационном приборостроении и предназначен для измерения магнитного курса и углов наклона подвижных объектов. Для измерения магнитного курса используют информацию о векторах магнитного поля Земли и линейного ускорения подвижного объекта. Вычисление одного из углов наклона подвижного объекта, необходимого для определения магнитного курса, производят из равенства априорно известной горизонтальной или вертикальной составляющей вектора напряженности магнитного поля Земли с его вычисленным значением по измеренной датчиками информации. Вычисление другого угла наклона производят по измеренной датчиками информации и определенному первому углу наклона.
Недостатком данного способа является наличие существенных погрешностей измерения магнитного курса из-за остаточной девиации и измерения углов ориентации ЛА при маневрировании.
Известен Способ коррекции бесплатформенной инерциальной навигационной системы, описанный в патенте №2564380, МПК G01C 21/06, опубликован 27.09.2015 г., принятый нами за прототип.
В известном способе коррекцию БИНС осуществляют по сигналам, поступающим с акселерометров, входящих в состав инерциальной навигационной системы (ИНС). Для этого определяют модуль абсолютного ускорения, действующего на объект, на котором установлена ИНС, и в момент времени, когда абсолютное ускорение равно ускорению силы тяжести для местности, где находится ИНС, в установившемся режиме полета определяют углы тангажа и крена объекта. Для непрерывной коррекции углов тангажа и крена используют сигналы, соответствующие угловой скорости объекта, и сигнал, соответствующий земной скорости объекта. Комплексирование этих сигналов и сигналов, соответствующих линейным ускорениям, преобразованных с учетом параметров полета объекта, и адаптивную оценку углов крена и тангажа осуществляют посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модуля перегрузки, угловых скоростей и земной скорости объекта.
В указанном способе непрерывная коррекции БИНС осуществляется по крену и тангажу по сигналам ДЛУ, но отсутствует коррекция гироскопического курса.
Целью заявляемого изобретения является обеспечение непрерывной коррекции БИНС по углам курса, крена и тангажа с требуемой точностью, в том числе и при маневрировании летательного аппарата.
Поставленная цель достигается за счет того, что согласно способу коррекции БИНС, при котором коррекция углов крена и тангажа подвижного объекта осуществляется путем обработки сигналов ДЛУ и ДУС, использования адаптивной обработки посредством фильтра Калмана и измерения магнитного курса магнитометрическим датчиком, дополнительно определяют вертикальную и горизонтальную проекции абсолютного значения магнитного поля Земли на плоскости магнитного меридиана с учетом угла магнитного наклонения по известным координатам местоположения, определяют разность измеренных значений проекций магнитного поля Земли трехкомпонентным магнитометрическим датчиком и проекций составляющих магнитного поля Земли, определенных по текущим координатам подвижного объекта при помощи матрицы направляющих косинусов на связанную ось, и, минимизируя полученную разность путем использования фильтра Калмана, получают скорректированные текущие значения магнитного курса, углов тангажа и крена объекта.
В случае когда подвижным объектом является летательный аппарат (ЛА), абсолютную величину напряженности магнитного поля Земли определяют, в частности, путем усреднения абсолютных значений магнитного поля, определяемых по измерениям трехкомпонентного магнитометрического датчика при выполнении ЛА маневра «полет по кругу».
Благодаря предлагаемому способу коррекции БИНС происходит списание остаточной полукруговой и четвертной девиации магнитометрического датчика, повышается точность оценивания углов магнитного курса, крена и тангажа, причем значение магнитного курса не содержит ошибки, обусловленной аномальными магнитными полями. В результате, зависимость маятниковой коррекции от вида движения объекта ослабляется до уровня, позволяющего использовать датчики ДУС средней и низкой точности, в том числе микромеханического типа.
Суть способа излагается ниже.
По измерениям датчиков ДУС, ДЛУ и трехосного магнитометра оценивается вектор состояния:

Здесь ψ - магнитный курс, ϑ - тангаж, γ - крен, V - модуль земной скорости, i - номер дискретного момента времени измерений датчиков.
Изменение крена, тангажа и угла рыскания описывается с помощью кватерниона ориентации, для которого угол рыскания принимается равным магнитному курсу.

Расчет кватерниона (2) по вектору (1), необходимый для определения его начального значения и уточнения на каждом шаге коррекции, выполняется с помощью известных соотношений.

q1=c1c2c3-s1s2s3, q2=c1c2s3+s1s2c3, q3=c1s2s3+s1c2c3, q1=c1s2s3-s1c2c3.
Вычисление кватерниона (2) сопровождается его нормированием.
 После вычисления (4) исходный кватернион q заменяется на нормированный кватернион
После вычисления (4) исходный кватернион q заменяется на нормированный кватернион  .
.
По кватерниону ориентации определяется матрица поворота А(3,3) направляющих косинусов.

Расчет тангажа, крена и угла рыскания по матрице поворота выполняется с помощью соотношений

При счислении ориентации используется кватернион угловых скоростей.

где ωх, ωу, ωz - измерения, поступающие с блока датчиков угловых скоростей [1/с].
Определение текущего кватерниона ориентации выполняется с помощью одношагово-го алгоритма, имеющего вид:

где Δt - шаг дискретизации измерений по времени, «ο» - операция произведения кватернионов.
Вектор состояния адаптивного фильтра Калмана представлен в выражении (1). Все возмущения принимаются нормальными процессами белого шума.
Уравнения (1) являются линейными относительно вектора возмущений w и могут быть записаны в векторном виде
 Соответствующая детерминированная модель имеет вид
Соответствующая детерминированная модель имеет вид

Априорная информация о начальном состоянии принимается в виде нормального распределения вектора состояния для начального времени t0:

Здесь ψ0 - начальное значение угла рыскания, равное ψM.
Измерения вектора состояния являются дискретными с малым шагом дискретизации по времени Δt=ti-fi-1.
Вектор измерений сигналов для дискретных моментов времени ti имеет вид

Для определения магнитного курса используют трехкомпонентный магнитометрический датчик.
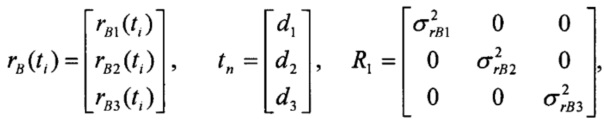
Рассмотрим плоскость магнитного меридиана, которая является вертикальной плоскостью, проходящей через точку текущего местоположения летательного аппарата. Она содержит в себе вектор напряженности геомагнитного поля, который обозначим  где d1, d2, d3 - горизонтальная, вертикальная и поперечная составляющие. При известных значениях широты ϕ, долготы λ и радиуса Земли r проекции вектора напряженности магнитного поля Земли определяют по известным выражениям [1] итеративным методом:
где d1, d2, d3 - горизонтальная, вертикальная и поперечная составляющие. При известных значениях широты ϕ, долготы λ и радиуса Земли r проекции вектора напряженности магнитного поля Земли определяют по известным выражениям [1] итеративным методом:




Y=Y',


где ϕ' и ϕ - геоцентрическая и геодезическая географические широты местности. Отсюда определяем искомые величины:
d1=X⋅cosD; d2=-Z; d3=Y⋅cosD.
Отметим, что абсолютная величина напряженности магнитного поля Земли может быть определена способом усреднения определяемых абсолютных значений магнитного поля по измерениям трехкомпонентного магнитометрического датчика, путем совершения маневра «полет по кругу».
Ориентацию аппарата определяют относительно текущей нормальной земной системы координат, повернутой в горизонте в направлении магнитного меридиана.
Тогда при произвольной ориентации аппарата трехкомпонентный магнитометрический датчик измеряет проекции вектора tn на оси чувствительности датчика. Далее полагаем, что оси чувствительности совпадают со строительными осями летательного аппарата. Вектор наблюдений, обозначаемый далее Z1, содержит измерения трехосного магнитометрического датчика, а вектор наблюдений, обозначаемый далее Z2, содержит измерения акселерометров, поступающих с блока датчиков линейных ускорений.

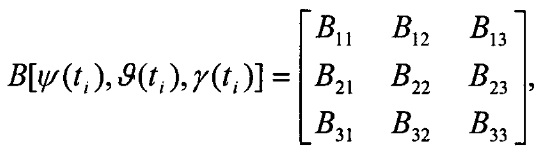
где B(t) - матрица направляющих косинусов между связанной с ЛА системой координат и нормальной земной системой координат, повернутой на угол магнитного склонения D на горизонтальной плоскости.

Здесь νi - вектор ошибок измерений с заданной ковариационной матрицей R2.
Функции  ,
,  ,
,  определяют связь измерений перегрузок с параметрами полета. Точные соотношения для этих функций имеют вид.
определяют связь измерений перегрузок с параметрами полета. Точные соотношения для этих функций имеют вид.

Здесь Vx, Vy, Vz - проекции вектора земной скорости на связанные оси ЛА.
Полный учет соотношений (15) при ограничении состава датчиков только акселерометрами и гироскопами не представляется возможным, поэтому принимается упрощающее допущение о малости углов атаки и скольжения, а также допущение о постоянстве модуля путевой скорости в интервале дискретизации Δt.
При этом имеют место соотношения: Vx=V,  и уравнения (15) упрощаются.
и уравнения (15) упрощаются.

С учетом (16) матрица Якоби вектора наблюдений (13,14) имеет вид:


Соотношения (13) являются приближенными. Степень приближения зависит от отклонения модуля перегрузки от единицы. Чем больше модуль перегрузки отличается от единицы, тем менее точны эти уравнения и тем больше дисперсии  ,
,  ,
,  . Данные дисперсии задаются линейной функцией следующего вида:
. Данные дисперсии задаются линейной функцией следующего вида:

где 
Приближенность соотношений (15) учитывается с помощью включения в модель динамики вектора состояния (1) дополнительных возмущений, уровень которых определяется мерой отличия модуля перегрузки от единицы и модуля угловой скорости от нуля.
Текущий вектор состояния (1) рассчитывается по кватерниону (2) с учетом (4), (5), (6), после чего полагается, что он известен с точностью до указанных дополнительных возмущений. При этом уравнения объекта принимаются в виде:

Здесь xjq - вектор, в котором компоненты крена, тангажа и угла рыскания рассчитаны по соотношениям (6), а компонента скорости принимается равной ее априорному значению на момент текущих измерений; wi - вектор возмущений с переменной ковариационной матрицей Qi:

В соответствии с (10) матрица дискретной модели объекта, используемая в алгоритме фильтра Калмана для прогноза ковариационной матрицы ошибок оценивания, принимается единичной. Адаптивный алгоритм фильтра Калмана имеет следующий вид:




Дисперсии возмущений в ковариационной матрице (21) задаются нелинейными функциями модуля перегрузки и модуля угловой скорости.

Суть данных функций заключается в том, что чем больше модуль перегрузки отличается от единицы и модуль угловой скорости от нуля, тем больше должны быть СКО возмущений, действующих на модель (10). Для этого функции (23) задаются в кусочно-линейном виде, а узлы их интерполяции определяются путем настройки на обучающем множестве характерных процессов динамики ЛА. Настройка функций (23) осуществляется отдельно, для каждого типа ЛА.
Таким образом, с помощью предложенного способа решают задачу определения вектора  по наблюдениям (12) с учетом одношагового алгоритма ориентации (8).
по наблюдениям (12) с учетом одношагового алгоритма ориентации (8).
Получаемый при этом вектор (1) на каждом шаге пересчитывают в кватернион (2) в соответствии с соотношениями (3).
Техническим результатом использования изобретения является повышение точности и обеспечение непрерывности коррекции углов курса, тангажа и крена в условиях маневрирования в полете. Изобретение позволяет использовать магнитометрические датчики, датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа. Кроме того, в процессе определения магнитного курса списывается остаточная девиация трехкомпонентного магнитометрического датчика магнитного курса и способ нечувствителен к кратковременным магнитным аномалиям магнитного поля Земли.
Литература
1. Chulliat, A., S. Macmillan, P. Aiken, С. Beggan, М. Nair, В. Hamilton, A. Woods, V. Ridley, S. Maus and A. Thomson, 2015, The US/UK World Magnetic Modelfor 2015-2020: Technical Report, National Geophysical Data Center, NOAA. doi: 10.7289/V5TB14V7.
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю
Устройство для определения углов пространственной ориентации подвижного объекта
Способ определения центра масс летательного аппарата и устройство для его осуществления
Бесплатформенная инерциальная курсовертикаль
Способ коррекции бесплатформенной инерциальной навигационной системы
Способ определения координат центра масс самолета в полете и устройство для его осуществления
Способ определения тяги двигателей самолета
Устройство определения погрешностей измерения углов атаки и скольжения
Способ определения погрешности измерения воздушной скорости и устройство для его осуществления

