Результат интеллектуальной деятельности: МЕТОД И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ФОТОГРАФИИ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА СООТВЕТСТВУЮЩУЮ ЗАЯВКУ
[0001] Настоящая заявка основана на и заявляет о приоритете по китайской заявке на патент №201410438203.9, поданной 29 августа 2014 г., полное содержание которой включено сюда посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение в целом относится к области обработки изображений и, более конкретно, к способу получения фотографии и устройству для получения фотографии.
ВВОДНАЯ ИНФОРМАЦИЯ
[0003] Траекторная фотография представляет собой фотографию, которая может показать траекторию движущегося объекта. Траекторная фотография может предоставить пользователю новый визуальный эффект.
[0004] Как правило, в предшествующем уровне техники, чтобы захватить траекторию движущегося объекта, пользователь обладает некоторыми профессиональными навыками фотографирования. В основном, в процессе фотографирования требуется штатив для фиксации камеры, и траекторная фотография высокого качества может быть получена путем координации соответствующей выдержки со скоростью перемещения движущегося объекта. Однако поскольку операция является сложной и специализированной, обычный пользователь не может получить высококачественную траекторную фотографию.
КРАТКОЕ ИЗЛОЖЕНИЕ
[0005] Чтобы преодолеть проблемы в предшествующем уровне техники, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за сложности и специализации процесса, предоставляется способ получения фотографии и устройство для получения фотографии. Техническим решением является следующее:
[0006] Согласно первому аспекту вариантов осуществления настоящего изобретения предусмотрен способ получения фотографии, включающий:
получение n кадров изображений, в которых n≥2;
выявление первых фоновых областей и движущихся объектов в n кадрах изображений;
синтезирование целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами, причем целевая фотография содержит по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, размещенного на одной фоновой области.
[0007] В одном из вариантов осуществления настоящего изобретения получение n кадров изображений включает в себя:
съемку в быстром непрерывном режиме съемки для получения n кадров изображений, причем быстрый непрерывный режим съемки является режимом для съемки при каждом заданном интервале.
[0008] В одном из вариантов осуществления настоящего изобретения получение n кадров изображений включает в себя:
съемку видео;
извлечение n кадров изображений из видео.
[0009] В одном из вариантов осуществления настоящего изобретения способ также включает:
определение того, что электронное устройство в данный момент находится в стационарном состоянии,
причем этап получения n кадров изображений выполняется, если электронное устройство в данный момент находится в стационарном состоянии.
[0010] В одном из вариантов осуществления настоящего изобретения определение того, что электронное устройство в данный момент находится в стационарном состоянии, включает:
получение данных от датчика, расположенного на электронном устройстве, причем датчик содержит один или несколько датчиков ускорения силы тяжести, гироскоп и электронный датчик компаса;
определение изменения данных датчика, при котором определяется, что электронное устройство в данный момент находится в стационарном состоянии, если данные датчика не изменяются;
и/или
определение изменения второй фоновой области, полученной датчиком изображения электронного устройства, при котором определяется, что электронное устройство в данный момент находится в стационарном состоянии, если вторая фоновая область не изменяется.
[0011] В одном из вариантов осуществления настоящего изобретения выявление первых фоновых областей и движущихся объектов в n кадрах изображений включает:
выявление первых фоновых областей в n кадрах изображений;
обнаружение движущихся объектов со скоростями движения, достигающими заданной скорости в первых фоновых областях, согласно соседним изображениям.
[0012] В одном из вариантов осуществления настоящего изобретения синтезирование целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами включает в себя:
выявление одинаковой фоновой области в n кадрах изображений;
извлечение по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечение по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений;
синтезирование целевой фотографии согласно одной первой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрытием части, не превышающей заданное пороговое значение.
[0013] В одном из вариантов осуществления настоящего изобретения синтезирование целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами включает в себя:
получение целевой фоновой области путем монтажа первых фоновых областей с частичным перекрытием;
извлечение по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечение по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений;
синтезирование целевой фотографии согласно целевой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрытием части, не превышающей заданное пороговое значение.
[0014] Согласно второму аспекту вариантов осуществления настоящего изобретения предусмотрено устройство получения фотографии, включающее:
модуль получения изображения, сконфигурированный для получения n кадров изображений, где n≥2;
модуль выявления изображения, сконфигурированный для выявления первых фоновых областей и движущихся объектов в n кадрах изображений;
модуль синтезирования фотографии, сконфигурированный для синтезирования целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами, причем целевая фотография содержит по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, размещенного на одной фоновой области.
[0015] В одном из вариантов осуществления настоящего изобретения модуль получения изображения включает:
первый субмодуль съемки, сконфигурированный для съемки в быстром непрерывном режиме съемки для получения n кадров изображений, причем быстрый непрерывный режим съемки является режимом для съемки при каждом заданном интервале.
[0016] В одном из вариантов осуществления настоящего изобретения модуль получения изображения включает:
второй субмодуль съемки, сконфигурированный для съемки видео;
субмодуль извлечения изображения, сконфигурированный для извлечения n кадров изображений из видео.
[0017] В одном из вариантов осуществления настоящего изобретения устройство также включает:
модуль определения стационарного состояния, сконфигурированный для определения того, что электронное устройство в данный момент находится в стационарном состоянии;
причем модуль получения изображения дополнительно сконфигурирован для выполнения операции получения n кадров изображений, если электронное устройство в данный момент находится в стационарном состоянии.
[0018] В одном из вариантов осуществления настоящего изобретения модуль определения стационарного состояния включает:
первый субмодуль определения, сконфигурированный для получения данных от датчика, расположенного на электронном устройстве, причем датчик содержит один или несколько датчиков ускорения силы тяжести, гироскоп и электронный датчик компаса; и для обнаружения изменения данных датчика, причем если данные датчика не изменяются, происходит определение того, что электронное устройство в данный момент находится в стационарном состоянии;
и/или
второй субмодуль определения, сконфигурированный для определения изменения второй фоновой области, полученной датчиком изображения электронного устройства, при котором определяется, что электронное устройство в данный момент находится в стационарном состоянии, если вторая фоновая область не изменяется.
[0019] В одном из вариантов осуществления настоящего изобретения модуль выявления изображения включает:
субмодуль выявления фоновой области, сконфигурированный для выявления первых фоновых областей в n кадрах изображений;
субмодуль определения скорости движения, сконфигурированный для определения движущихся объектов со скоростями движения, достигающими заданной скорости в первых фоновых областях, согласно соседним изображениям.
[0020] В одном из вариантов осуществления настоящего изобретения модуль синтезирования фотографии включает:
субмодуль выявления одинаковой фоновой области, сконфигурированный для выявления одинаковых первых фоновых областей в n кадрах изображений;
первый субмодуль извлечения, сконфигурированный для извлечения по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечения по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений;
первый субмодуль синтезирования, сконфигурированный для синтезирования целевой фотографии согласно одной первой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрытием части, не превышающей заданное пороговое значение.
[0021] В одном из вариантов осуществления настоящего изобретения модуль синтезирования фотографии включает:
субмодуль монтажа фоновой области, сконфигурированный для получения целевой фоновой области, путем монтажа первых фоновых областей с частичным перекрытием;
второй субмодуль извлечения, сконфигурированный для извлечения по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечения по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений;
второй субмодуль синтезирования, сконфигурированный для синтезирования целевой фотографии согласно целевой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрытием части, не превышающей заданное пороговое значение.
[0022] Технические решения, предлагаемые в вариантах осуществления настоящего изобретения, имеют следующие преимущества.
[0023] Путем получения n кадров изображений, где n≥2; выявления первых фоновых областей и движущихся объектов в n кадрах изображений и путем синтезирования целевой фотографии согласно первым фоновым областям и движущимся объектам, причем целевая фотография включает в себя по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, находящегося в одной первой фоновой области, могут быть решены проблемы в предшествующем уровне техники, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за того, что операция является сложной и специализированной, и достигается результат, когда высококачественная траекторная фотография может быть получена пользователем без выполнения сложных операций.
[0024] Следует понимать, что предшествующее общее описание и последующее подробное описание являются только иллюстративными и пояснительными, и не ограничивают изобретения, как заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0025] Прилагаемые чертежи, включенные в документ и составляющие часть данного описания, иллюстрируют варианты осуществления в соответствии с изобретением, и вместе с описанием служат для объяснения принципов изобретения.
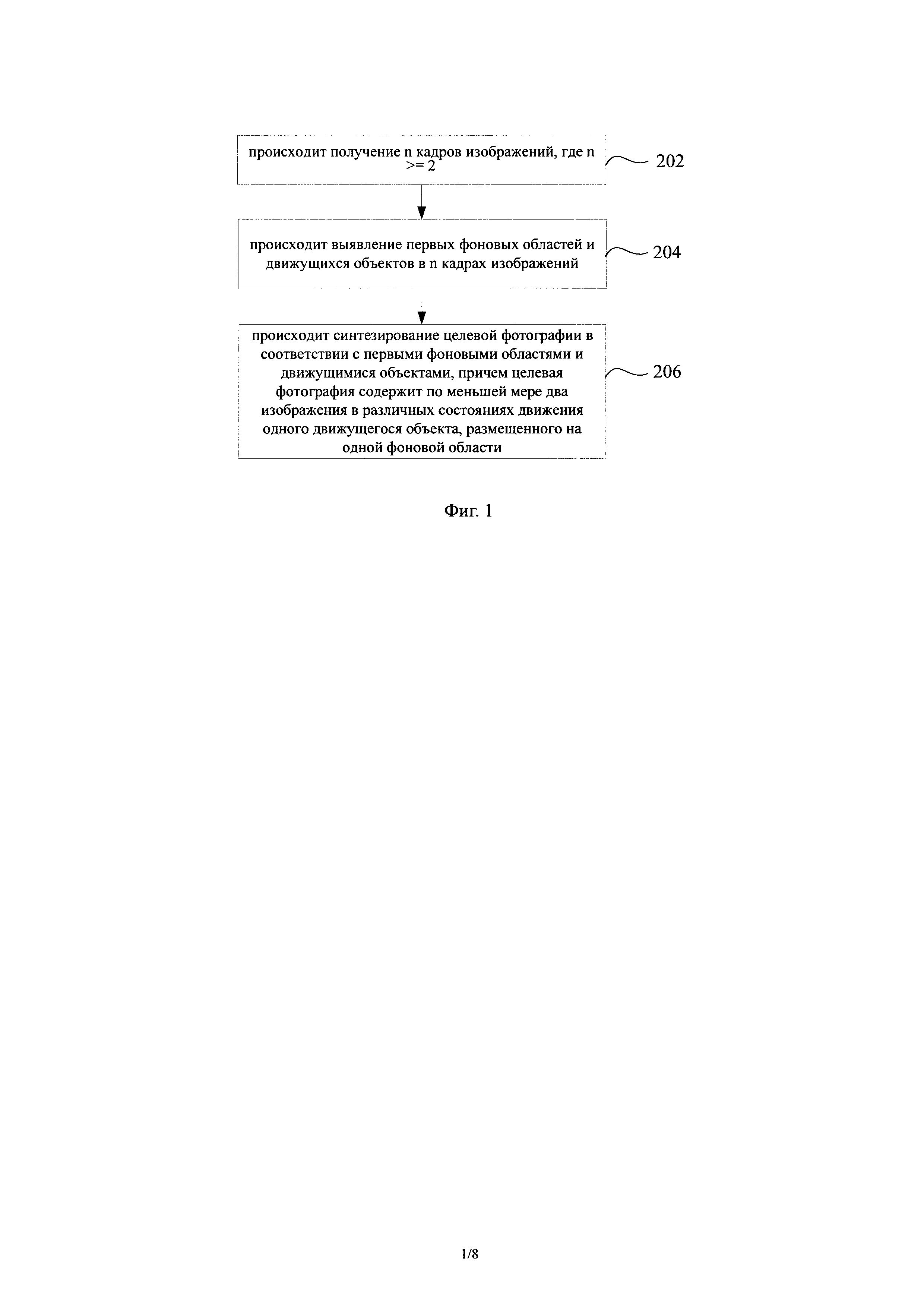
[0026] На Фиг. 1 показана блок-схема, иллюстрирующая способ получения фотографии согласно примерному варианту осуществления настоящего изобретения.
[0027] На Фиг. 2 показана блок-схема, иллюстрирующая способ получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
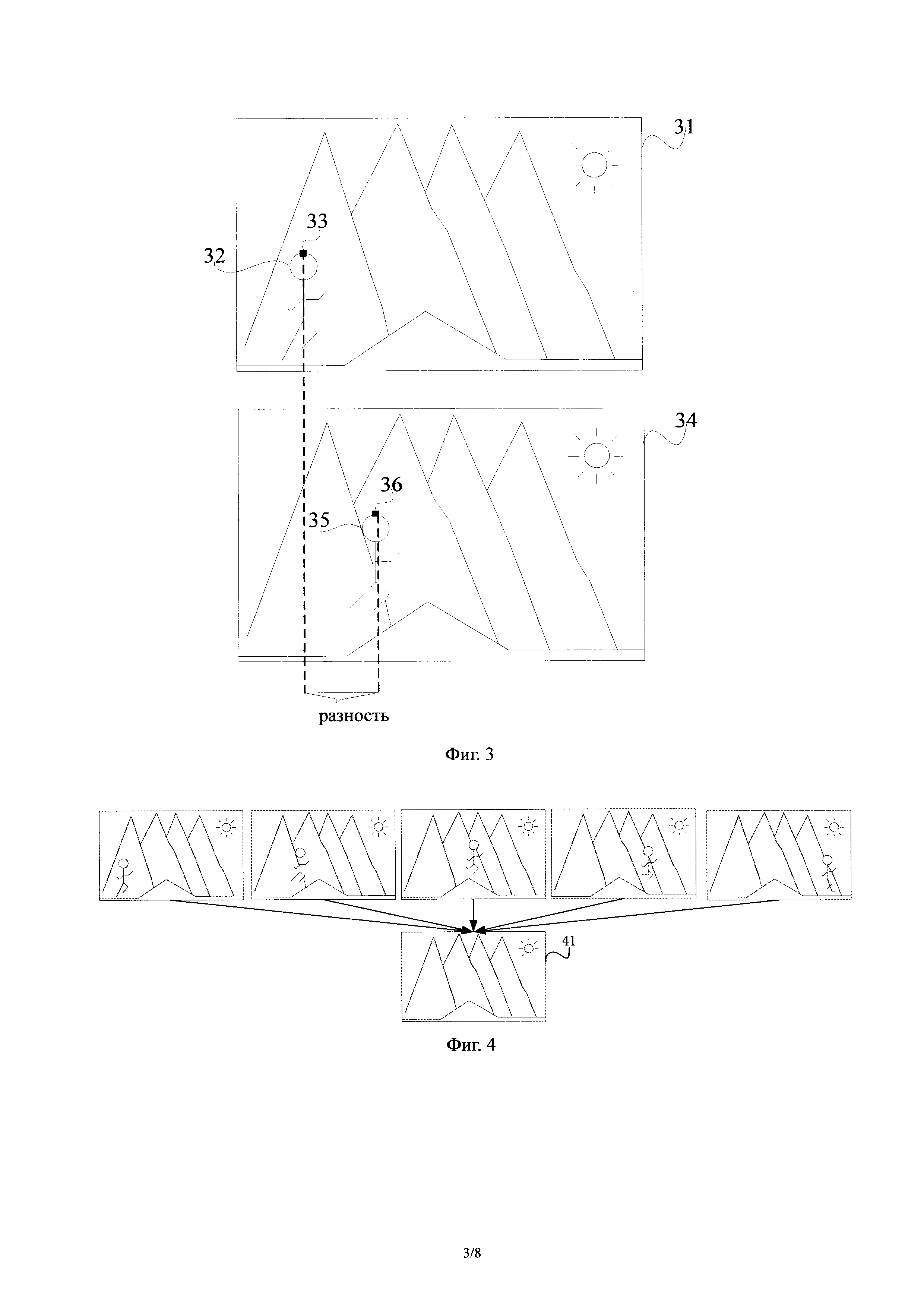
[0028] На Фиг. 3 представлена принципиальная схема варианта осуществления способа получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
[0029] На Фиг. 4 представлена принципиальная схема варианта осуществления способа получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
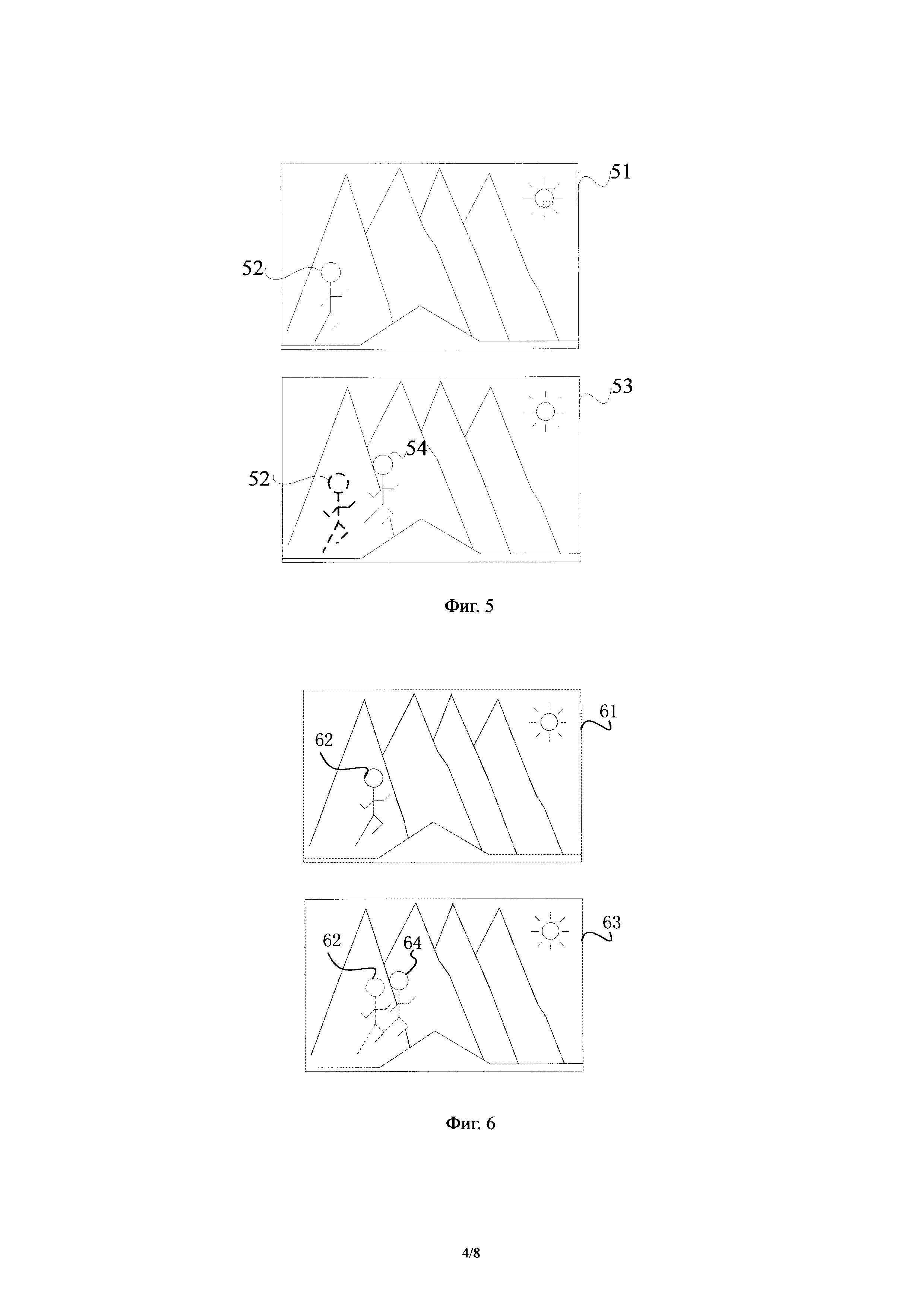
[0030] На Фиг. 5 представлена принципиальная схема варианта осуществления способа получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
[0031] На Фиг. 6 представлена принципиальная схема варианта осуществления способа получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
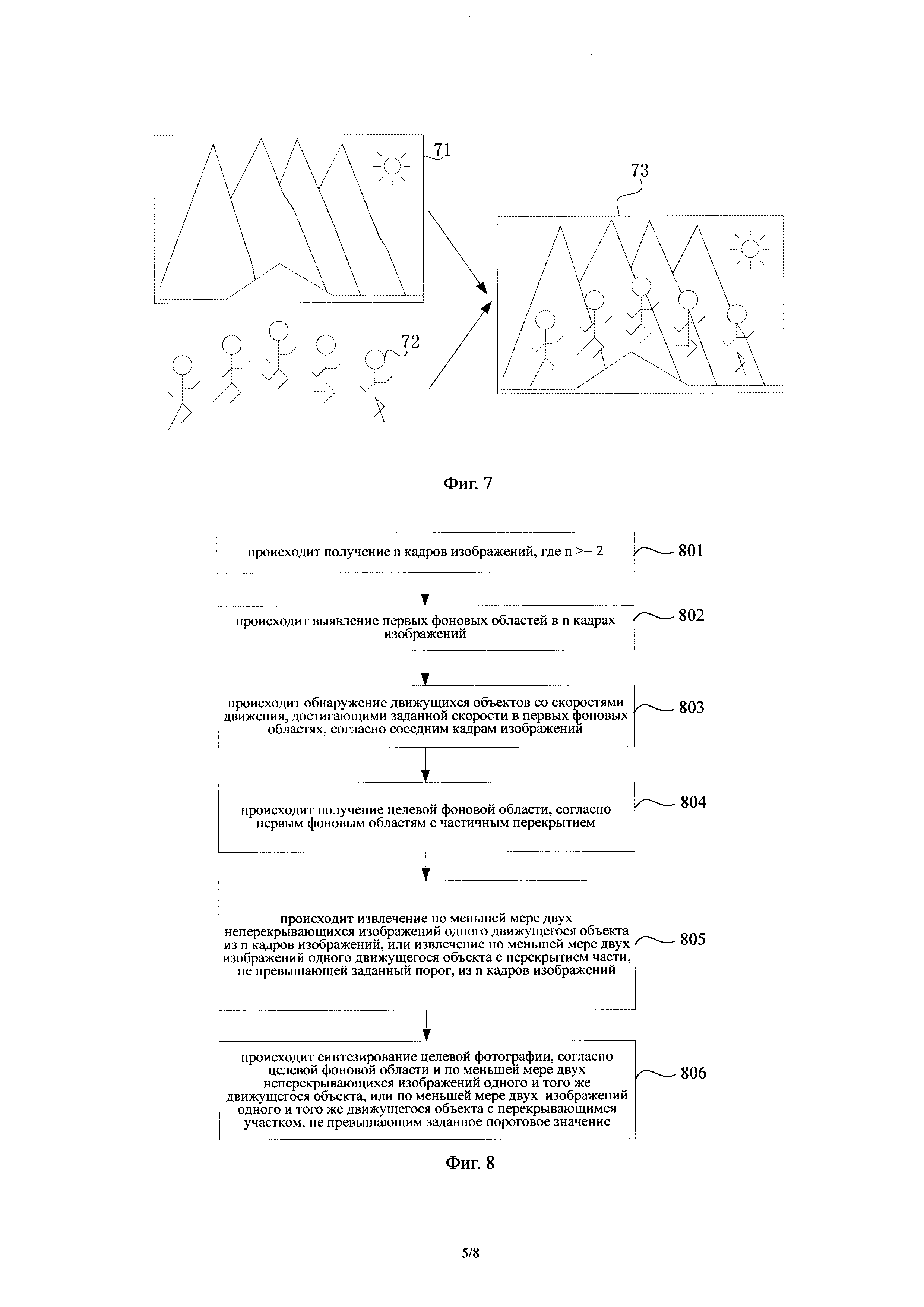
[0032] На Фиг. 7 представлена принципиальная схема варианта осуществления способа получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
[0033] На Фиг. 8 показана блок-схема, иллюстрирующая способ получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
[0034] На Фиг. 9 представлена принципиальная схема варианта осуществления способа получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
[0035] На Фиг. 10 показана структурная схема устройства для получения фотографии согласно примерному варианту осуществления настоящего изобретения.
[0036] На Фиг. 11 показана структурная схема устройства для получения фотографии согласно другому примерному варианту осуществления настоящего изобретения.
[0037] На Фиг. 12 показана структурная схема электронного устройства, согласно примерному варианту осуществления настоящего изобретения.
[0038] В соответствии с описанными выше прилагаемыми чертежами предлагаются варианты осуществления настоящего изобретения, которые будут описаны более подробно ниже. Эти прилагаемые чертежи и соответствующее описание никаким образом не ограничивают объем изобретения, и концепция настоящего изобретения предназначена специалистам в данной области, со ссылкой на конкретные варианты осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0039] Ниже будет приведено подробное описание примерных вариантов осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Следующее описание ссылается на прилагаемые чертежи, на которых одинаковые номера на разных чертежах представляют собой одинаковые или аналогичные элементы, если не указано иное. Реализации, изложенные в последующем описании примерных вариантов осуществления, не являются всеми реализациями, соответствующими изобретению. Они являются просто примерами устройств и способов, которые соответствуют аспектам, связанным с изобретением, как изложено в прилагаемой формуле изобретения.
[0040] Способ получения фотографии, в соответствии с вариантами осуществления настоящего изобретения, может быть реализован с помощью электронного устройства, которое обладает возможностью обработки изображений и возможностью фотографирования. Электронным устройством может быть смартфон, планшет, электронная книга, ноутбук (камера), и т.д.
[0041] Чтобы в дальнейшем упростить описание, в качестве примера был выбран способ получения фотографии, который выполняется электронным устройством, имеющим возможность обработки изображений и фотографирования. Выбор электронного устройства не ограничивается данным документом.
[0042] На Фиг. 1 показана блок-схема, иллюстрирующая способ получения фотографии согласно примерному варианту осуществления настоящего изобретения. В данном варианте осуществления для примера был выбран способ получения фотографии, который выполняется электронным устройством, имеющим возможность обработки изображений и фотографирования. Способ получения фотографии может включать в себя следующие этапы.
[0043] На этапе 102 происходит получение n кадров изображений, где n≥2.
[0044] На этапе 104 происходит выявление первых фоновых областей и движущихся объектов в n кадрах изображений.
[0045] На этапе 106 происходит синтезирование целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами, причем целевая фотография содержит по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, размещенного на одной фоновой области.
[0046] В заключение, с помощью способа получения фотографии согласно примерному варианту осуществления настоящего изобретения путем получения n кадров изображений, где n≥2; выявления первых фоновых областей и движущихся объектов в n кадрах изображений и путем синтезирования целевой фотографии согласно первым фоновым областям и движущимся объектам, причем целевая фотография включает в себя по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, находящегося в одной первой фоновой области, могут быть решены проблемы, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за того, что операция является сложной и специализированной, и достигается результат, когда высококачественная траекторная фотография может быть получена пользователем без выполнения сложных операций.
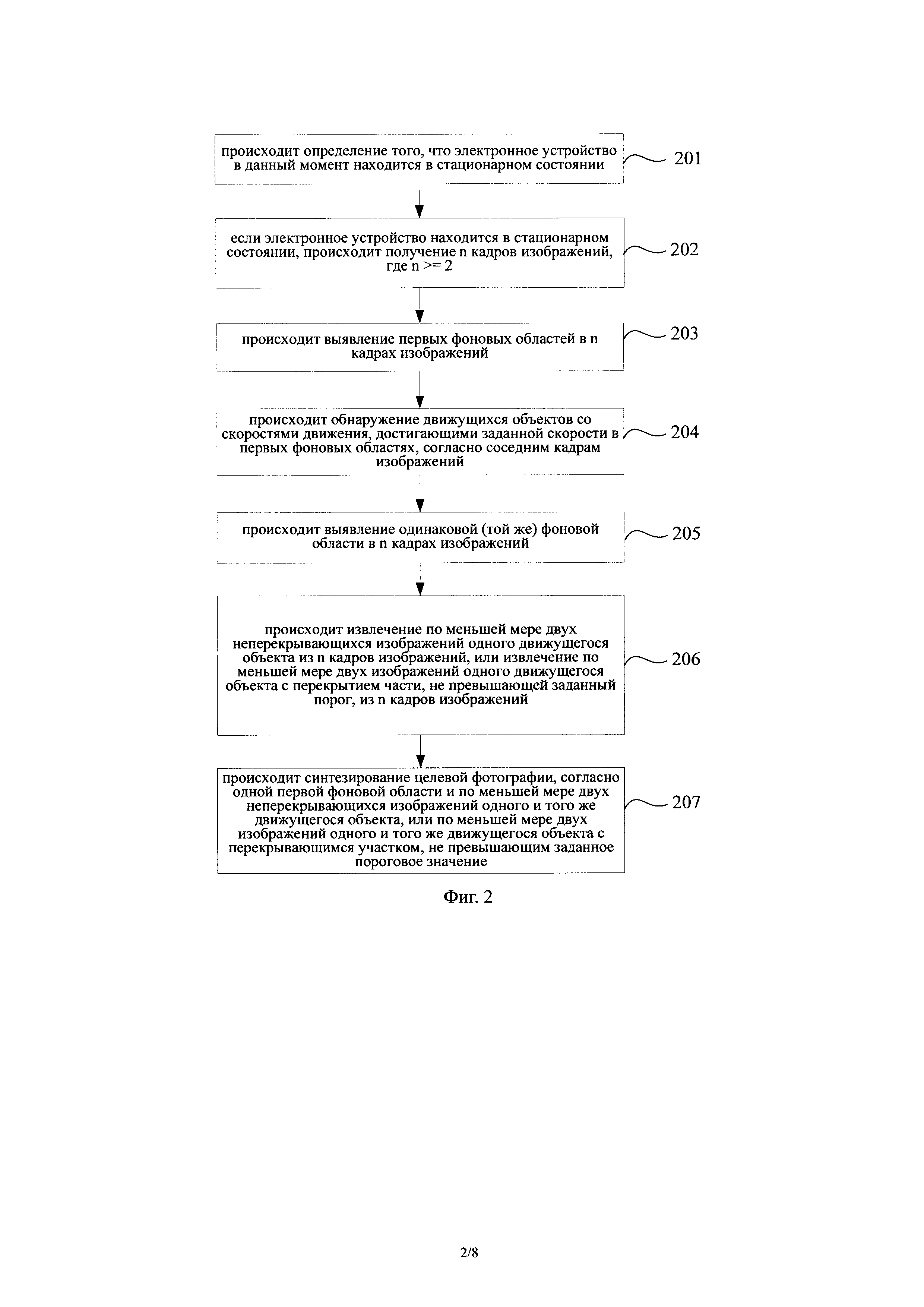
[0047] На Фиг. 2 показана блок-схема, иллюстрирующая способ получения фотографии согласно примерному варианту осуществления настоящего изобретения. В данном варианте осуществления для примера был выбран способ получения фотографии, который выполняется электронным устройством, имеющим возможность обработки изображений и фотографирования. Способ получения фотографии может включать в себя следующие этапы.
[0048] На этапе 201 происходит определение того, что электронное устройство в данный момент находится в стационарном состоянии.
[0049] Если функция съемки электронного устройства включена, электронное устройство может обнаружить, находится ли оно в настоящее время в стационарном состоянии. Этап 201 может быть реализован посредством любого из следующих двух способов или их сочетания.
[0050] Согласно первому способу электронное устройство получает данные отдатчика, расположенного на электронном устройстве, причем датчик содержит один или несколько датчиков ускорения силы тяжести, гироскоп и электронный датчик компаса; и затем электронное устройство определяет изменения данных датчика, причем если данные датчика не изменяются, происходит определение того, что электронное устройство в данный момент находится в стационарном состоянии.
[0051] Согласно второму способу электронное устройство определяет изменения второй фоновой области, полученной датчиком изображения электронного устройства, при котором определяется, что электронное устройство в данный момент находится в стационарном состоянии, если вторая фоновая область не изменяется.
[0052] Когда два способа реализуются в сочетании друг с другом, первый способ может быть выполнен в первую очередь, а затем может быть выполнен второй способ, если данные датчика не изменяются.
[0053] Если результатом определения является то, что электронное устройство в данный момент находится в стационарном состоянии, следует этап 202; при определении того, что электронное устройство находится в нестационарном состоянии, повторяется этап 201.
[0054] На этапе 202, если электронное устройство находится в стационарном состоянии, происходит получение n кадров изображений, где n≥2.
[0055] Если электронное устройство находится в стационарном состоянии в текущий момент, происходит получение n кадров изображений. Этап 202 может включать в себя следующие подэтапы:
1) электронное устройство сначала снимает видео;
2) электронное устройство извлекает n кадров изображений из видео.
[0056] Электронное устройство может извлечь каждый кадр изображения из видео, чтобы получить n кадров изображений. Как правило, n кадров изображений выстраиваются в последовательность, в зависимости от времени съемки, от раннего к позднему. N кадров изображений имеют такую же или подобную первую фоновую область. Электронное устройство может получить n кадров изображений согласно способу извлечения одного кадра изображения, с интервалом в несколько предварительно определенных кадров изображений.
[0057] Например, если предположить, что видео включает в себя 24 кадра изображений, электронное устройство может извлечь каждый кадр изображений из видео, и всего может быть получено 24 кадра изображений; электронное устройство может извлекать один кадр изображений с интервалом в 4 кадра изображений, и всего может быть получено 6 кадров изображений.
[0058] В качестве другого возможного осуществления, электронное устройство может получить n кадров изображений осуществляя съемку в быстром непрерывном режиме, причем быстрый непрерывный режим является режимом для съемки через каждый заданный интервал.
[0059] На этапе 203 происходит выявление первых фоновых областей в n кадрах изображений.
[0060] Электронному устройству необходимо выявить первые фоновые области в n кадрах изображений. Альтернативно, этап 203 может включать в себя следующие подэтапы:
1) электронное устройство осуществляет операцию вычисления разности для двух соседних кадров изображений, чтобы получить разностное изображение;
так как полутона и позиции пикселей на первых фоновых областях как правило не изменяются, разностное изображение, полученное путем операции вычисления разности для двух соседних кадров изображений, представляет собой изображение движущихся объектов;
2) электронное устройство осуществляет операцию вычисления разности для каждого из двух соседних кадров изображений и разностного изображения для получения фонового изображения, соответствующего двум соседними кадрам изображений;
так как разностное изображение получается в качестве изображения движущихся объектов, алгоритм вычисления разности выполняется для каждого из двух соседних кадров изображений и разностного изображения, и электронное устройство может получить фоновое изображение, соответствующее двум соседним кадрам изображений.
[0061] Следует пояснить, что указанный способ показан только в качестве примера, и метод определения электронным устройством первых фоновых областей в n кадрах изображений не ограничивается этим вариантом осуществления.
[0062] На этапе 204 происходит обнаружение движущихся объектов со скоростями движения, достигающими заданной скорости в первых фоновых областях, согласно соседним кадрам изображений.
[0063] Если скорости движущихся объектов являются слишком низкими, слишком много изображений движущихся объектов попадает на синтезированную траекторную фотографию, и изображения движущихся объектов могут перекрываться, что повлияет на качество траекторной фотографии. Изображениями движущихся объектов являются области, соответствующие движущимся объектами в n кадрах изображений. В качестве альтернативного этапа, электронное устройство может обнаруживать скорости движущихся объектов. Этап 204 может включать в себя следующие подэтапы:
1) электронное устройство выявляет движущиеся объекты в n кадрах изображений;
в первую очередь электронное устройство обнаруживает движущиеся объекты в n кадрах изображений посредством технологии обнаружения переднего плана и/или технологии обнаружения движущейся цели;
2) для любого из движущихся объектов электронное устройство получает координаты одного пикселя в изображении движущегося объекта в одном кадре изображения;
например, как показано на Фиг. 3, происходит получение координат пикселя 33 в изображении 32 движущегося объекта в кадре изображения 31;
3) электронное устройство получает координаты соответствующего пикселя в изображении движущегося объекта в соседнем кадре изображения, соответствующем одному кадру изображения;
например, как показано на Фиг. 3, координаты соответствующего пикселя 36 в изображении 35 движущегося объекта в соседнем кадре изображения 34, соответствующем одному кадру изображения 31;
4) электронное устройство вычисляет скорость движения движущегося объекта в соответствии с разницей в двух вышеуказанных координатах;
электронное устройство вычисляет разность координат пикселя 35 и координат пикселя 36, и вычисляет скорость движения движущегося объекта в соответствии с этой разницей и разницей во времени между соседним кадром изображения и одним кадром изображения;
электронное устройство сравнивает вычисленную скорость движущегося объекта с заданной скоростью, и если скорость движения движущегося объекта превышает предварительно заданную скорость, движущийся объект является движущимся объектом со скоростью движения, достигающей заданной скорости в первых фоновых областях.
[0064] На этапе 205 происходит выявление одинаковой (той же) фоновой области в n кадрах изображений.
[0065] Поскольку n кадров изображений снимаются в стационарном состоянии, n кадров изображений имеют ту же первую фоновую область или аналогичную первую фоновую область. После выявления первых фоновых областей n кадров изображений, электронное устройство может также определить одинаковую первую фоновую область из n кадров изображений в качестве фоновой области синтезируемой траекторной фотографии.
[0066] Как показано на Фиг. 4, есть 5 кадров изображений; так как полутона и позиции пикселей на первой фоновой области не изменяются, путем выполнения операции вычисления разности для 5 кадров изображений электронное устройство может выявить одинаковую первую фоновую область 41 для 5 кадров изображений.
[0067] На этапе 206 происходит извлечение по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечение по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений.
[0068] В результате возможной реализации этого этапа, изображения одинакового движущегося объекта могут перекрываться в n кадрах изображений, оказывая таким образом влияние на качество синтезируемой траекторной фотографии. Поэтому электронное устройство должно извлечь неперекрывающиеся изображения из n кадров изображений, и этап 206 может включать в себя следующие этапы:
1) электронное устройство получает два набора координат, соответствующих изображениям одного движущегося объекта в двух кадрах изображений соответственно;
как показано на Фиг. 5, электронное устройство получает набор координат А изображения 52 одного движущегося объекта в одном кадре изображения 51, и получает набор координат В изображения 54 того же движущегося объекта в одном кадре изображения 53;
2) электронное устройство определяет, являются ли они теми же самыми координатами в двух наборах координат; если да, то определяется, что два изображения одного движущегося объекта перекрываются, и одно из двух изображений одного движущегося объекта удаляется; если нет, то принимаются оба изображения одного движущегося объекта;
как показано на Фиг. 5, электронное устройство определяет наличие одинаковых координат в наборе координат А и наборе координат В; например, при отсутствии одинаковых координат в наборе координат А и наборе координат В, то определяется, что изображение 54 одного движущегося объекта и изображение 52 того же движущегося объекта не перекрываются.
[0069] В результате другого возможного осуществления этого этапа, если перекрывающийся участок является маленьким, качество синтезированной траекторной фотографии не страдает. Таким образом, электронное устройство может извлечь по крайней мере два изображения одного и того же движущегося объекта, с перекрывающимся участком, не превышающим заданный порог, из n кадров изображений, для чего предлагаются следующие этапы:
1) электронное устройство получает два набора координат, соответствующих изображениям одного движущегося объекта в двух кадрах изображений соответственно;
как показано на Фиг. 6, электронное устройство получает набор координат А изображения 62 одного движущегося объекта в одном кадре изображения 61, и получает набор координат В изображения 64 того же движущегося объекта в одном кадре изображения 63;
2) электронное устройство вычисляет соотношение одинаковых координат в двух наборах координат;
происходит получение количества одинаковых координат в двух наборах координат, а затем рассчитывается соотношение одинаковых координат в двух наборах координат;
3) если соотношение меньше или равно заданному пороговому значению, электронное устройство извлекает изображение одного и того же движущегося объекта из двух кадров изображений;
как показано на Фиг. 6, заданное пороговое значение составляет 10%; соотношение одинаковых координат в наборе координат А изображения 62 одного движущегося объекта и наборе координат В изображения 64 того же движущегося объекта составляет 5%, тогда электронное устройство извлекает изображение 62 одного движущегося объекта и изображение 64 того же движущегося объекта. Конечно, если соотношение превышает установленное пороговое значение, электронное устройство извлекает одно из двух изображений одного движущегося объекта и отбрасывает другое.
[0070] На этапе 207 происходит синтезирование целевой фотографии согласно одной первой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрывающимся участком, не превышающим заданное пороговое значение.
[0071] Электронное устройство синтезирует целевую фотографию (т.е. траекторную фотографию), согласно одной первой фоновой области, выявленной из n кадров изображений на этапе 208, и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта, или по меньшей мере двух изображений одного и того же движущегося объекта с перекрывающимся участком, не превышающим заданное пороговое значение, извлеченных на этапе 207.
[0072] Как показано на Фиг. 7, электронное устройство выявляет одну первую фоновую область 81 из пяти кадров изображений, и извлекает пять изображений 72 одного движущегося объекта и синтезирует целевую фотографию 73, в соответствии с одной первой фоновой областью 71 и пятью изображениями 72 одного движущегося объекта.
[0073] Здесь одним движущимся объектом может быть движущийся объект со скоростью движения, превышающей заданное пороговое значение, выбранный электронным устройством на этапе 204. В процессе синтезирования электронное устройство в первую очередь выбирает ту же первую фоновую области в качестве фоновой области целевой фотографии. Затем, для различных изображений одного движущегося объекта, в соответствии с исходными относительными позициями каждого изображения одного движущегося объекта относительно одной первой фоновой области в n кадрах изображений, электронное устройство копирует каждое изображение одного движущегося объекта в соответствующую позицию на той же первой фоновой области, чтобы получить целевую фотографию.
[0074] В заключение, с помощью способа получения фотографии согласно примерному варианту осуществления настоящего изобретения путем получения n кадров изображений, где n≥2; выявления первых фоновых областей и движущихся объектов в n кадрах изображений и путем синтезирования целевой фотографии согласно первым фоновым областям и движущимся объектам, причем целевая фотография включает в себя по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, находящегося в одной первой фоновой области, могут быть решены проблемы в предыдущем уровне техники, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за того, что операция является сложной и специализированной, и достигается результат, когда высококачественная траекторная фотография может быть получена пользователем без выполнения сложных операций.
[0075] Используя способ получения фотографии в соответствии с примерным вариантом осуществления настоящего изобретения, путем обнаружения того, что электронное устройство в данный момент находится в стационарном состоянии, может быть получено n кадров изображений, если электронное устройство в данный момент находится в стационарном состоянии; таким образом обеспечивается высокое качество синтезированной траекторной фотографии.
[0076] Используя способом получения фотографии в соответствии с примерным вариантом осуществления настоящего изобретения, путем извлечения по крайней мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечения по меньшей мере двух изображений одного движущегося объекта с перекрывающимся участком, не превышающим заданный порог, из n кадров изображений, может быть решена проблема серьезного перекрытия изображений в синтезированной траекторной фотографии; тем самым обеспечивается высокое качество синтезированной траекторной фотографии.
[0077] В процессе реализации, если первые фоновые области n кадров изображений не совсем одинаковы, но каждая первая фоновая область сильно пересекается с другой первой фоновой областью, электронное устройство может также монтировать первые фоновые области с пересечением, чтобы получить целевую фоновую область, аналогичную панорамной фотографии, затем может синтезировать траекторную фотографию, согласно целевой фоновой области и, по меньшей мере, двух неперекрывающихся изображений одного движущегося объекта или по меньшей мере двух изображений одного движущегося объекта с перекрывающимся участком, не превышающим заданное пороговое значение.
[0078] На Фиг. 8 показана блок-схема, иллюстрирующая способ получения фотографии согласно примерному варианту осуществления настоящего изобретения. В данном варианте осуществления для примера был снова выбран способ получения фотографии, который выполняется электронным устройством, имеющим возможность обработки изображений и фотографирования. Способ получения фотографии может включать в себя следующие этапы.
[0079] На этапе 801 происходит получение n кадров изображений, где n≥2.
[0080] Если электронное устройство находится в стационарном состоянии в текущий момент, происходит получение n кадров изображений. Этап 202 может включать в себя следующие подэтапы:
1) электронное устройство сначала снимает видео;
2) электронное устройство извлекает n кадров изображений из видео.
[0081] Электронное устройство может извлечь каждый кадр изображения из видео, чтобы получить n кадров изображений. Как правило, n кадров изображений выстраиваются в последовательность, в зависимости от времени съемки, от раннего к позднему. N кадров изображений имеют такую же или подобную первую фоновую область. Электронное устройство может получить n кадров изображений согласно способу извлечения одного кадра изображения, с интервалом в несколько предварительно определенных кадров изображений.
[0082] Например, если предположить, что видео включает в себя 24 кадра изображений, электронное устройство может извлечь каждый кадр изображений из видео, и всего может быть получено 24 кадра изображений; электронное устройство может извлекать один кадр изображений с интервалом в 4 кадра изображений, и всего может быть получено 6 кадров изображений.
[0083] В качестве другого возможного осуществления, электронное устройство может получить n кадров изображений осуществляя съемку в быстром непрерывном режиме, причем быстрый непрерывный режим является режимом для съемки через каждый заданный интервал.
[0084] На этапе 802 происходит выявление первых фоновых областей в n кадрах изображений.
[0085] Электронному устройству необходимо выявить первые фоновые области в n кадрах изображений. Альтернативно, этап 802 может включать в себя следующие подэтапы:
1) электронное устройство осуществляет операцию вычисления разности для двух соседних кадров изображений, чтобы получить разностное изображение;
так как полутона и позиции пикселей на первых фоновых областях как правило не изменяются, разностное изображение, полученное путем операции вычисления разности для двух соседних кадров изображений, представляет собой изображение движущихся объектов;
2) электронное устройство осуществляет операцию вычисления разности для каждого из двух соседних кадров изображений и разностного изображения для получения фонового изображения, соответствующего двум соседними кадрам изображений;
так как разностное изображение получается в качестве изображения движущихся объектов, алгоритм вычисления разности выполняется для каждого из двух соседних кадров изображений и разностного изображения, и электронное устройство может получить фоновое изображение, соответствующее двум соседним кадрам изображений.
[0086] Следует пояснить, что указанный способ показан только в качестве примера, и метод определения электронным устройством первых фоновых областей в n кадрах изображений не ограничивается этим вариантом осуществления.
[0087] На этапе 803 происходит обнаружение движущихся объектов со скоростями движения, достигающими заданной скорости в первых фоновых областях, согласно соседним кадрам изображений.
[0088] Если скорости движущихся объектов являются слишком низкими, слишком много изображений движущихся объектов попадает на синтезированную траекторную фотографию, и изображения движущихся объектов могут перекрываться, что повлияет на качество траекторной фотографии. Изображениями движущихся объектов являются области, соответствующие движущимся объектами в n кадрах изображений. В качестве альтернативного этапа, электронное устройство может обнаруживать скорости движущихся объектов. Этап 803 может включать в себя следующие подэтапы:
1) электронное устройство выявляет движущиеся объекты в n кадрах изображений;
в первую очередь электронное устройство обнаруживает движущиеся объекты в n кадрах изображений посредством технологии обнаружения переднего плана и/или технологии обнаружения движущейся цели;
2) для любого из движущихся объектов электронное устройство получает координаты одного пикселя в изображении движущегося объекта в одном кадре изображения;
например, как показано на Фиг. 3, происходит получение координат пикселя 33 в изображении 32 движущегося объекта в кадре изображения 31;
3) электронное устройство получает координаты соответствующего пикселя в изображении движущегося объекта в соседнем кадре изображения, соответствующем одному кадру изображения;
например, как показано на Фиг. 3, координаты соответствующего пикселя 36 в изображении 35 движущегося объекта в соседнем кадре изображения 34, соответствующем одному кадру изображения 31;
4) электронное устройство вычисляет скорость движения движущегося объекта в соответствии с разницей в двух вышеуказанных координатах;
электронное устройство вычисляет разность координат пикселя 35 и координат пикселя 36, и вычисляет скорость движения движущегося объекта в соответствии с этой разницей и разницей во времени между соседним кадром изображения и одним кадром изображения;
электронное устройство сравнивает вычисленную скорость движущегося объекта с заданной скоростью, и если скорость движения движущегося объекта превышает предварительно заданную скорость, движущийся объект является движущимся объектом со скоростью движения, достигающей заданной скорости в первых фоновых областях.
[0089] На этапе 804 происходит получение целевой фоновой области, согласно первым фоновым областям с частичным перекрытием.
[0090] Поскольку n кадров изображений может быть снято в нестационарном состоянии или в относительном стационарном состоянии (например, в двигающемся автомобиле), первые фоновые области, соответствующие n кадрам изображений, могут быть не совсем одинаковыми. Если первые фоновые области, соответствующие n кадрам изображений, не совсем одинаковые, и могут существовать перекрывающиеся участки, электронное устройство монтирует первые фоновые области для получения целевой фоновой области, в соответствии с перекрывающимся участком.
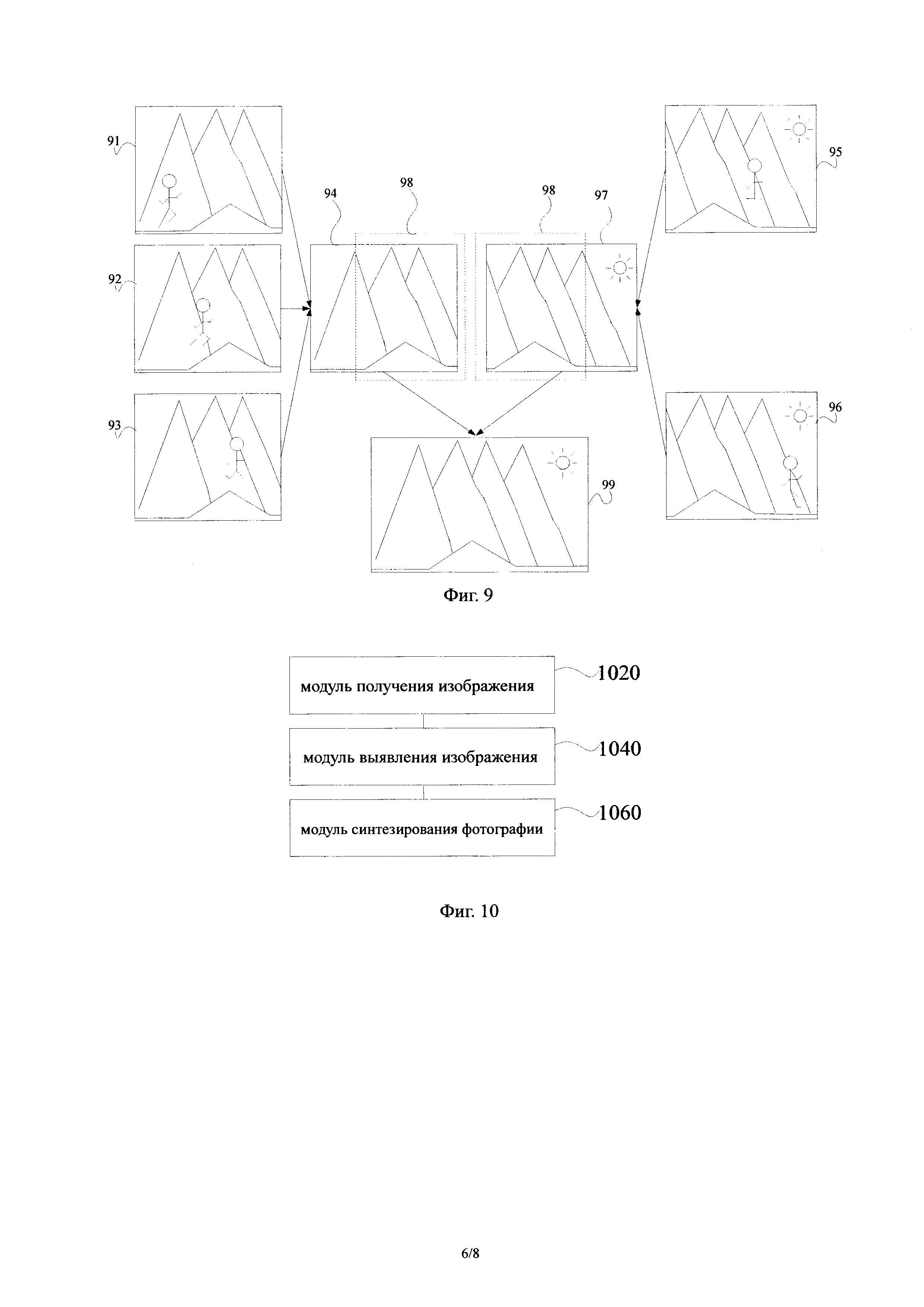
[0091] Как показано на Фиг. 9, изображение 91, изображение 92 и изображение 93 соответствуют одной фоновой области 94, изображение 95 и изображение 96 соответствуют одной первой фоновой области 97, но первая фоновая область 94 и первая фоновая область 97 не совсем одинаковы, причем существует перекрывающийся участок 98 в первой фоновой области 94 и первой фоновая области 97, электронное устройство монтирует первую фоновую область 97 и первую фоновую область 98, в соответствии с перекрывающимся участком 94, для получения целевой фоновой области 99.
[0092] На этапе 805 происходит извлечение по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечение по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений.
[0093] В результате возможной реализации этого этапа, изображения одинакового движущегося объекта могут перекрываться в n кадрах изображений, оказывая таким образом влияние на качество синтезируемой траекторной фотографии. Поэтому электронное устройство должно извлечь неперекрывающиеся изображения из n кадров изображений, и этап 805 может включать в себя следующие этапы:
1) электронное устройство получает два набора координат, соответствующих изображениям одного движущегося объекта в двух кадрах изображений соответственно;
как показано на Фиг. 5, электронное устройство получает набор координат А изображения 52 одного движущегося объекта в одном кадре изображения 51, и получает набор координат В изображения 54 того же движущегося объекта в одном кадре изображения 53;
2) электронное устройство определяет, являются ли они теми же самыми координатами в двух наборах координат; если да, то определяется, что два изображения одного движущегося объекта перекрываются, и одно из двух изображений одного движущегося объекта удаляется; если нет, то принимаются оба изображения одного движущегося объекта;
как показано на Фиг. 5, электронное устройство определяет наличие одинаковых координат в наборе координат А и наборе координат В; например, при отсутствии одинаковых координат в наборе координат А и наборе координат В, то определяется, что изображение 54 одного движущегося объекта и изображение 52 того же движущегося объекта не перекрываются.
[0094] В результате другого возможного осуществления этого этапа, если перекрывающийся участок является маленьким, качество синтезированной траекторной фотографии не страдает. Таким образом, электронное устройство может извлечь по крайней мере два изображения одного и того же движущегося объекта, с перекрывающимся участком, не превышающим заданный порог, из n кадров изображений, для чего предлагаются следующие этапы:
1) электронное устройство получает два набора координат, соответствующих изображениям одного движущегося объекта в двух кадрах изображений соответственно;
как показано на Фиг. 6, электронное устройство получает набор координат А изображения 62 одного движущегося объекта в одном кадре изображения 61, и получает набор координат В изображения 64 того же движущегося объекта в одном кадре изображения 63;
2) электронное устройство вычисляет соотношение одинаковых координат в двух наборах координат;
происходит получение количества одинаковых координат в двух наборах координат, а затем рассчитывается соотношение одинаковых координат в двух наборах координат;
3) если соотношение меньше или равно заданному пороговому значению, электронное устройство извлекает изображение одного и того же движущегося объекта из двух кадров изображений;
как показано на Фиг. 6, заданное пороговое значение составляет 10%; соотношение одинаковых координат в наборе координат А изображения 62 одного движущегося объекта и наборе координат В изображения 64 того же движущегося объекта составляет 5%, тогда электронное устройство извлекает изображение 62 одного движущегося объекта и изображение 64 того же движущегося объекта. Конечно, если соотношение превышает установленное пороговое значение, электронное устройство извлекает одно из двух изображений одного движущегося объекта и отбрасывает другое.
[0095] На этапе 806 происходит синтезирование целевой фотографии согласно целевой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрывающимся участком, не превышающим заданное пороговое значение.
[0096] Электронное устройство синтезирует целевую фотографию (т.е. траекторную фотографию), согласно целевой фоновой области, смонтированной на этапе 804, и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта, или по меньшей мере двух изображений одного и того же движущегося объекта с перекрывающимся участком, не превышающим заданное пороговое значение, извлеченных электронным устройством на этапе 805.
[0097] Здесь одним движущимся объектом может быть движущийся объект со скоростью движения, превышающей заданное пороговое значение, выбранный электронным устройством на этапе 803. В процессе синтезирования электронное устройство в первую очередь выбирает целевую фоновую область в качестве фоновой области целевой фотографии. Затем, для различных изображений одного движущегося объекта, в соответствии с исходными относительными позициями каждого изображения одного движущегося объекта относительно целевой фоновой области в n кадрах изображений, электронное устройство копирует каждое изображение одного движущегося объекта в соответствующую позицию на целевой фоновой области, чтобы получить целевую фотографию.
[0098] Как показано на Фиг. 7, электронное устройство монтирует первые фоновые области с перекрывающимся участком для получения целевой фоновой области, и извлекает пять изображений 72 одного движущегося объекта и синтезирует целевую фотографию 73, в соответствии с целевой фоновой областью 71 и пятью изображениями 72 одного движущегося объекта.
[0099] В заключение, с помощью способа получения фотографии согласно примерному варианту осуществления настоящего изобретения путем получения n кадров изображений, где n≥2; выявления первых фоновых областей и движущихся объектов в n кадрах изображений и путем синтезирования целевой фотографии согласно первым фоновым областям и движущимся объектам, причем целевая фотография включает в себя по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, находящегося в одной первой фоновой области, могут быть решены проблемы в предыдущем уровне техники, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за того, что операция является сложной и специализированной, и достигается результат, когда высококачественная траекторная фотография может быть получена пользователем без выполнения сложных операций.
[00100] Используя способ получения фотографии, в соответствии с примерным вариантом осуществления настоящего изобретения, путем монтажа первых фоновых областей с перекрывающимся участком для получения целевой фоновой области, и путем синтезирования целевой фотографии согласно целевой фоновой области и по меньшей мере двух неперекрывающихся изображений одного движущегося объекта или по меньшей мере двух изображений одного движущегося объекта с перекрывающимся участком, не превышающим заданное пороговое значение, может быть достигнут эффект создания панорамы траектории.
[00101] Варианты создания устройства, в соответствии с настоящим изобретением, заключаются в следующем. Устройство используется для осуществления способа, в соответствии с вариантами осуществления настоящего изобретения. Относительно подробностей, которые не описаны в вариантах осуществления устройства, делается ссылка на варианты осуществления способа.
[00102] На Фиг. 10 показана структурная схема устройства для получения фотографии согласно примерному варианту осуществления настоящего изобретения. Устройство согласно этому варианту осуществления может представлять собой полное электронное устройство или его часть, с возможностью обработки изображений посредством программного обеспечения, аппаратных средств или их комбинации. Устройство может включать:
модуль получения изображения 1020, сконфигурированный для получения n кадров изображений, где n≥2;
модуль выявления изображения 1040, сконфигурированный для выявления первых фоновых областей и движущихся объектов в n кадрах изображений;
модуль синтезирования фотографии 1060, сконфигурированный для синтезирования целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами, причем целевая фотография содержит по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, размещенного на одной фоновой области.
[00103] В заключение, с помощью устройства получения фотографии согласно примерному варианту осуществления настоящего изобретения путем получения n кадров изображений, где n≥2; выявления первых фоновых областей и движущихся объектов в n кадрах изображений и путем синтезирования целевой фотографии согласно первым фоновым областям и движущимся объектам, причем целевая фотография включает в себя по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, находящегося в одной первой фоновой области, могут быть решены проблемы в предыдущем уровне техники, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за того, что операция является сложной и специализированной, и достигается результат, когда высококачественная траекторная фотография может быть получена пользователем без выполнения сложных операций.
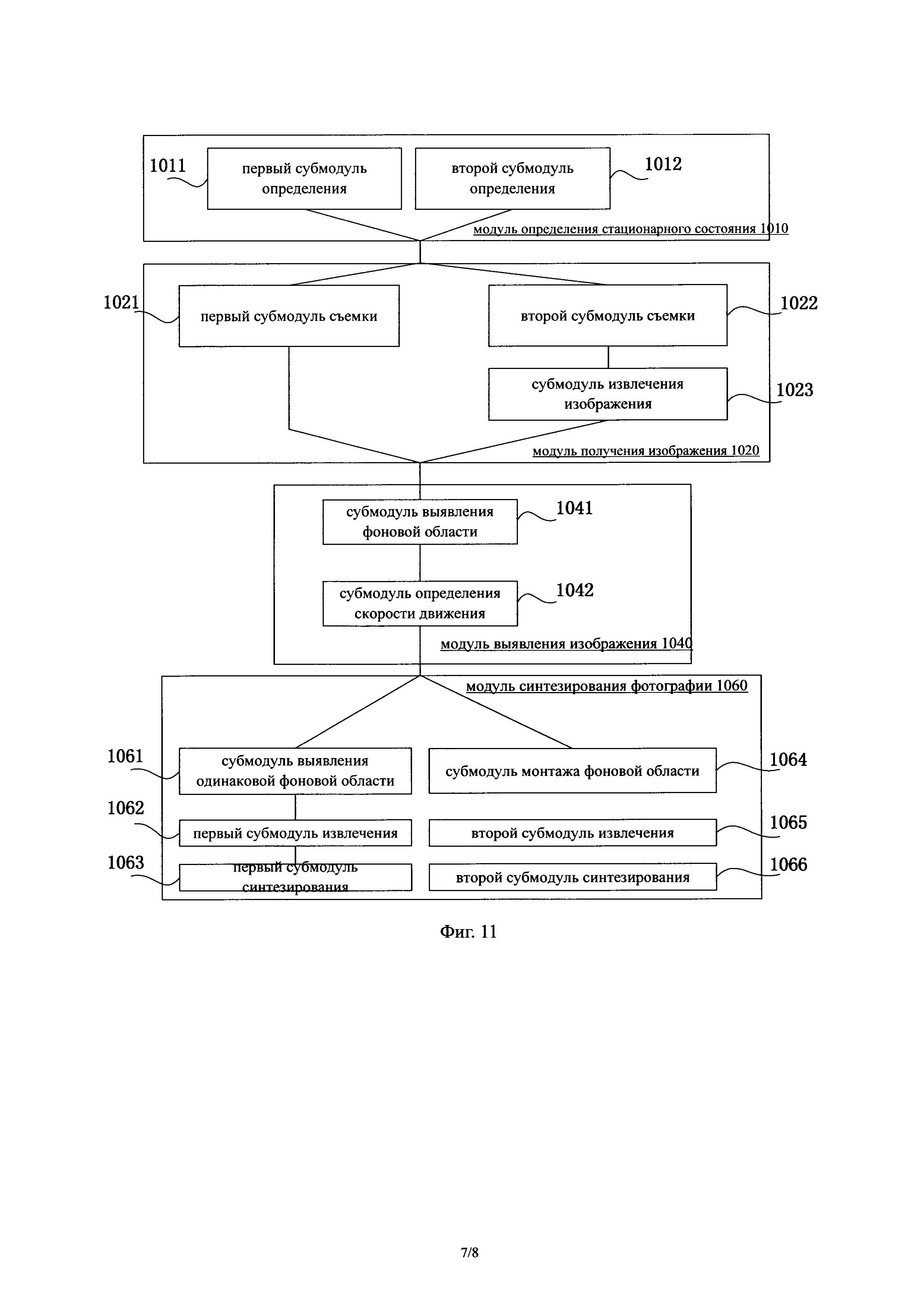
[00104] На Фиг. 11 показана структурная схема устройства для получения фотографии согласно другому примерному варианту осуществления настоящего изобретения. Устройство согласно этому варианту осуществления может представлять собой полное электронное устройство или его часть, с возможностью обработки изображений посредством программного обеспечения, аппаратных средств или их комбинации. Устройство может включать:
модуль получения изображения 1020, сконфигурированный для получения n кадров изображений, где n≥2;
модуль выявления изображения 1040, сконфигурированный для выявления первых фоновых областей и движущихся объектов в n кадрах изображений;
модуль синтезирования фотографии 1060, сконфигурированный для синтезирования целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами, причем целевая фотография содержит по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, размещенного на одной фоновой области.
[00105] В качестве альтернативы модуль получения изображения 1020 включает в себя:
первый субмодуль съемки 1021, сконфигурированный для съемки в быстром непрерывном режиме съемки для получения n кадров изображений, причем быстрый непрерывный режим съемки является режимом для съемки при каждом заданном интервале.
[00106] В качестве альтернативы модуль получения изображения 1020 включает в себя:
второй субмодуль съемки 1022, сконфигурированный для съемки видео;
субмодуль извлечения изображения 1023, сконфигурированный для извлечения n кадров изображений из видео.
[00107] В качестве альтернативы устройство дополнительно включает:
модуль определения стационарного состояния 1010, сконфигурированный для определения того, что электронное устройство в данный момент находится в стационарном состоянии;
причем модуль получения изображения 1020 дополнительно сконфигурирован для выполнения операции получения n кадров изображений, если электронное устройство в данный момент находится в стационарном состоянии.
[00108] В качестве альтернативы модуль определения стационарного состояния 1010 включает в себя:
первый субмодуль определения 1011, сконфигурированный для получения данных от датчика, расположенного на электронном устройстве, причем датчик содержит один или несколько датчиков ускорения силы тяжести, гироскоп и электронный датчик компаса; и для обнаружения изменения данных датчика, причем если данные датчика не изменяются, происходит определение того, что электронное устройство в данный момент находится в стационарном состоянии;
и/или
второй субмодуль определения 1012, сконфигурированный для определения изменения второй фоновой области, полученной датчиком изображения электронного устройства, при котором определяется, что электронное устройство в данный момент находится в стационарном состоянии, если вторая фоновая область не изменяется.
[00109] В качестве альтернативы модуль выявления изображения 1040 включает в себя:
субмодуль выявления фоновой области 1041, сконфигурированный для выявления первых фоновых областей в n кадрах изображений;
субмодуль определения скорости движения 1042, сконфигурированный для определения движущихся объектов со скоростями движения, достигающими заданной скорости в первых фоновых областях, согласно соседним изображениям.
[00110] В качестве альтернативы модуль синтезирования фотографии 1060 включает в себя:
субмодуль выявления одинаковой фоновой области 1061, сконфигурированный для выявления одинаковых первых фоновых областей в n кадрах изображений;
первый субмодуль извлечения 1062, сконфигурированный для извлечения по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечения по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений;
первый субмодуль синтезирования 1063, сконфигурированный для синтезирования целевой фотографии согласно одной первой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрытием части, не превышающей заданное пороговое значение.
[00111] В качестве альтернативы модуль синтезирования фотографии 1060 включает в себя:
субмодуль монтажа фоновой области 1064, сконфигурированный для получения целевой фоновой области, путем монтажа первых фоновых областей с частичным перекрытием;
второй субмодуль извлечения 1065, сконфигурированный для извлечения по меньшей мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечения по меньшей мере двух изображений одного движущегося объекта с перекрытием части, не превышающей заданный порог, из n кадров изображений;
второй субмодуль синтезирования 1066, сконфигурированный для синтезирования целевой фотографии согласно целевой фоновой области и по меньшей мере двух неперекрывающихся изображений одного и того же движущегося объекта или по меньшей мере двух изображений одного и того же движущегося объекта с перекрытием части, не превышающей заданное пороговое значение.
[00112] В заключение, с помощью устройства получения фотографии согласно примерному варианту осуществления настоящего изобретения путем получения n кадров изображений, где n≥2; выявления первых фоновых областей и движущихся объектов в n кадрах изображений и путем синтезирования целевой фотографии согласно первым фоновым областям и движущимся объектам, причем целевая фотография включает в себя по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, находящегося в одной первой фоновой области, могут быть решены проблемы в предыдущем уровне техники, когда обычный пользователь не может получить высококачественную траекторную фотографию из-за того, что операция является сложной и специализированной, и достигается результат, когда высококачественная траекторная фотография может быть получена пользователем без выполнения сложных операций.
[00113] Используя устройство получения фотографии в соответствии с примерным вариантом осуществления настоящего изобретения, путем обнаружения того, что электронное устройство в данный момент находится в стационарном состоянии, может быть получено n кадров изображений, если электронное устройство в данный момент находится в стационарном состоянии; таким образом обеспечивается высокое качество синтезированной траекторной фотографии.
[00114] Используя устройство получения фотографии в соответствии с примерным вариантом осуществления настоящего изобретения путем извлечения по крайней мере двух неперекрывающихся изображений одного движущегося объекта из n кадров изображений или извлечения по меньшей мере двух изображений одного движущегося объекта с перекрывающимся участком, не превышающим заданный порог, из n кадров изображений, может быть решена проблема серьезного перекрытия изображений в синтезированной траекторной фотографии; тем самым обеспечивается высокое качество синтезированной траекторной фотографии.
[00115] Что касается устройств в вышеописанных вариантах осуществления, конкретные способы выполнения операций для отдельных модулей были подробно описаны в вариантах осуществления, относящихся к способам получения фотографии, и не описываются здесь снова.
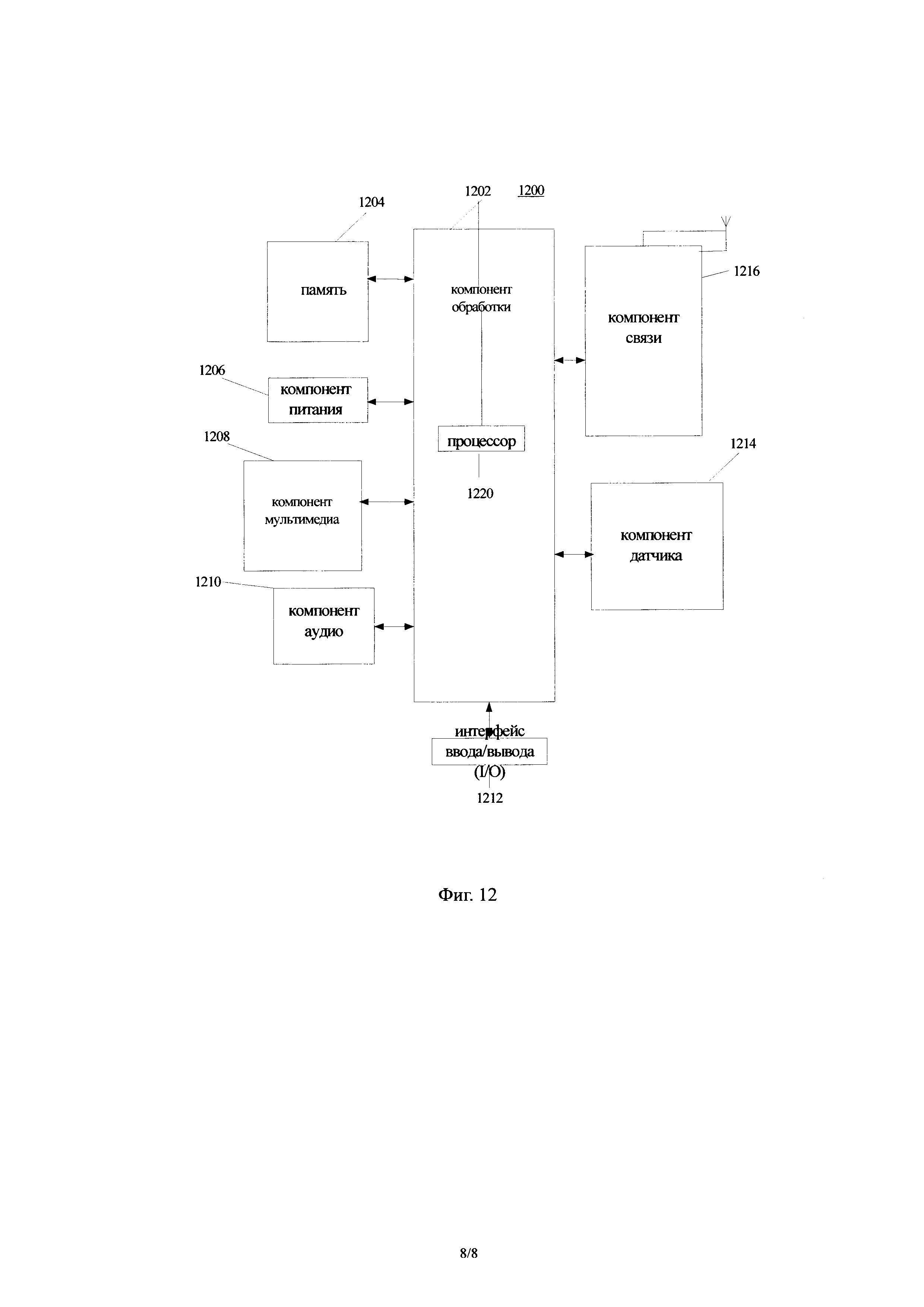
[00116] На Фиг. 12 показана структурная схема устройства 1200 для получения фотографии согласно варианту осуществления настоящего изобретения. Например, устройство 1200 может быть электронным устройством с возможностью обработки изображений.
[00117] Как показано на Фиг. 12, устройство 1200 может включать в себя один или несколько следующих компонентов: компонент обработки 1202, память 1204, компонент питания 1206, компонент мультимедиа 1208, компонент аудио 1210, интерфейс ввода/вывода (I/O) 1212, компонент сенсора 1214, и компонент связи 1216.
[00118] Компонент обработки 1202 обычно управляет всеми операциями устройства 1200, например, операциями, связанными с дисплеем, телефонными звонками, передачей данных, работой камеры и записи. Компонент обработки 1202 может включать в себя один или несколько процессоров 1220 для выполнения инструкций, связанных со всеми или некоторыми этапами вышеописанных способов. Кроме того, компонент обработки 1202 может включать в себя один или несколько модулей, которые облегчают взаимодействие между компонентом обработки 1202 и другими компонентами. Например, компонент обработки 1202 может включать в себя мультимедийный модуль для облегчения взаимодействия между компонентом мультимедиа 1208 и компонентом обработки 1202.
[00119] Память 1204 сконфигурирована для хранения различных типов данных для поддержки работы устройства 1200. Примеры таких данных включают в себя инструкции для любых типов применения или способов эксплуатации устройства 1200, контактные данные, данные телефонной книги, сообщения, фотографии, видео и т.д. Память 1204 может быть реализована с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств, или их комбинации, например, статического оперативного запоминающего устройства (SRAM), электрически стираемого программируемого ПЗУ (EEPROM), стираемого программируемого ПЗУ (EPROM), программируемого ПЗУ (PROM), ПЗУ (ROM), магнитной памяти, флэш-памяти, магнитного или оптического диска.
[00120] Компонент питания 1206 обеспечивает питание различным компонентам устройства 1200. Компонент питания 1206 может включать в себя систему управления электропитанием, один или более источников питания, а также другие компоненты, связанные с производством, управлением и распределением электроэнергии в устройстве 1200.
[00121] Компонент мультимедиа 1208 включает в себя экран, обеспечивающий выходной интерфейс между устройством 1200 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть выполнен в виде сенсорного экрана для получения входных сигналов от пользователя. Сенсорная панель включает в себя один или несколько сенсорных датчиков для определения прикосновений и жестов на сенсорной панели. Сенсорные датчики могут определять не только границу прикосновения или движения пальца, но также и продолжительность и давление, связанные с прикосновением или движением. В некоторых вариантах осуществления компонент мультимедиа 1208 включает переднюю и/или заднюю камеры. Передняя и задняя камера могут получать внешние мультимедийные данные, когда устройство 1200 находится в режиме работы, например, в режиме фотографирования или в режиме видео. Каждая из камер может представлять собой систему фиксированных оптических линз, или иметь фокус и возможность оптического увеличения.
[00122] Компонент аудио 1210 сконфигурирован для вывода и/или ввода звуковых сигналов. Например, компонент аудио 1210 включает в себя микрофон («MIC»), сконфигурированный для приема внешнего аудио сигнала, когда устройство 1200 находится в режиме работы, например, в режиме вызова, режиме записи и в режиме распознавания голоса. Принятый аудио сигнал может в дальнейшем сохраняться в памяти 1204 или передаваться с помощью компонента связи 1216. В некоторых вариантах осуществления компонент аудио 1210 дополнительно включает в себя динамик для вывода аудио сигналов.
[00123] Интерфейс ввода/вывода 1212 обеспечивает интерфейс между компонентом обработки 1202 и модулями интерфейса периферийных устройств, таких как клавиатура, колесо управления, кнопки и тому подобное. Кнопки могут включать в себя, помимо прочего, кнопку «домой», кнопку громкости, кнопку пуска и кнопку блокировки.
[00124] Компонент датчика 1214 включает в себя один или несколько датчиков для оценки состояния различных аспектов устройства 1200. Например, компонент датчика 1214 может обнаружить состояние включения/выключения устройства 1200, относительное положение компонента (например, дисплея и клавиатуры) устройства 1200. Компонент датчика 1214 может также обнаружить изменение положения устройства 1200 или компонента устройства 1200, наличие или отсутствие контакта пользователя с устройством 1200, ориентацию или ускорение/замедление устройства 1200 и изменение температуры устройства 1200. Компонент датчика 1214 может включать в себя бесконтактный датчик, сконфигурированный для обнаружения присутствия близлежащих объектов без физического контакта. Компонент датчика 1214 может также включать в себя датчик света, такой как датчик изображения CMOS или CCD, для использования в получении изображений. В некоторых вариантах осуществления компонент датчика 1214 может также включать в себя акселерометр, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00125] Компонент связи 1216 сконфигурирован для обеспечения проводной или беспроводной связи между устройством 1200 и другими терминалами. Устройство 1200 может получить доступ к беспроводной сети на основе стандарта связи, такого как WiFi, 2G, 3G или их комбинации. В одном примерном варианте осуществления компонент связи 1216 принимает широковещательный сигнал или трансляцию связанной информации от внешней системы управления вещанием по широковещательному каналу. В одном примерном варианте осуществления компонент связи 1216 дополнительно включает в себя модуль связи малого радиуса действия (NFC) для обеспечения связи ближнего радиуса действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциации инфракрасной передачи данных (IrDA), технологии ультра-широкополосного вещания (UWB), технологии Bluetooth (ВТ) и других технологий.
[00126] В примерных вариантах осуществления устройство 1200 может быть реализовано с одним или несколькими электронными элементами, например, специализированными интегральными схемами (ASIC), цифровыми процессорами сигналов (DSP), устройствами цифровой обработки сигналов (DSPD), программируемыми логическими устройствами (PLD), программируемыми вентильными матрицами (FPGA), контроллерами, микроконтроллерами, микропроцессорами или другими электронными компонентами, для реализации описанных выше способов.
[00127] В примерных вариантах осуществления предусмотрен также энергонезависимый машиночитаемый носитель данных с инструкциями, такими как память 1204 с инструкциями, выполняемыми процессором 1220 устройства 1200 для реализации описанных выше способов. Например, энергонезависимый машиночитаемый носитель данных может представлять собой ПЗУ, ОЗУ, CD-ROM, магнитную ленту, гибкий диск, оптическое устройство хранения данных и тому подобное.
[00128] Варианты осуществления настоящего изобретения предусматривают также энергонезависимый машиночитаемый носитель данных. Энергонезависимый машиночитаемый носитель данных, в соответствии с вариантами осуществления настоящего изобретения, может содержать инструкции, которые, при выполнении процессором в устройстве, заставляют устройство выполнить способ получения фотографии. Способ включает:
получение n кадров изображений, в которых n≥2;
выявление первых фоновых областей и движущихся объектов в n кадрах изображений;
синтезирование целевой фотографии в соответствии с первыми фоновыми областями и движущимися объектами, причем целевая фотография содержит по меньшей мере два изображения в различных состояниях движения одного движущегося объекта, размещенного на одной фоновой области.
[00129] Другие варианты осуществления изобретения будут очевидны для специалистов в данной области при рассмотрении описания и изучении изобретения. Предполагается, что эта заявка охватывает любые изменения, варианты применения или адаптацию изобретения, согласно изложенным общим принципам, и включая такие отклонения от настоящего изобретения, которые известны или являются обычной практикой в данной области. Предполагается, что описание и примеры будут рассматриваться только в качестве примера, с истинной сущностью и объемом изобретения, указанным в прилагаемой формуле изобретения.
[00130] Следует понимать, что настоящее изобретение не ограничивается точной конструкцией, описанной выше и проиллюстрированной на сопроводительных чертежах, и что различные модификации и изменения могут быть сделаны без отступления от объема изобретения. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта

