МАНИПУЛЯТОР И ПОДВИЖНОЕ УСТРОЙСТВО
Вид РИД
Изобретение
Изобретение относится к манипулятору для контактного и/или инвазивного исследования или лечения человека или животного под воздействием повышенного или изменяющегося ускорения и к подвижному устройству, по меньшей мере, с одним фиксирующим устройством для аккомодации и/или фиксации тела человека или животного, которое предусмотрено на первом несущем элементе, который установлен свободно вращающимся вокруг первой главной оси, а также к использованию манипулятора в подвижном устройстве.
Известны устройства для тренировки пилотов или подготовки лиц к состояниям повышенного изменяющегося ускорения, при этом фиксирующее устройство для аккомодации и/или фиксации тела расположено свободно вращающимся вокруг первой главной оси. Человек испытывает повышенное ускорение в результате вращения на определенном стандартном расстоянии от главной оси вращения. Величина ускорения составлена из радиального ускорения и гравитационного ускорения. Величина вектора может таким образом меняться путем изменения угловой скорости вокруг первой главной оси и/или путем изменения стандартного расстояния.
Более того, можно предусмотреть дополнительные степени свободы и приводные устройства, чтобы расположить тело человека или животного в подвижном устройстве относительно результирующего вектора ускорения. Расположение результирующего вектора ускорения относительно положения тела можно таким образом выбрать путем такого позиционирования.
Примерами таких устройств являются пилотажные тренажеры, однозвенные центрифуги, многозвенные центрифуги с перемещающейся кареткой, многозвенные центрифуги с перемещающейся вверх кареткой, медицинские центрифуги с множеством кабинок, свободно вращающихся вокруг главной оси, и т.д. В заявке ЕР 2351001 А1, например, показано типичное устройство.
Для контроля физических функций занимающих место таких подвижных устройств можно измерить параметры, такие как частота пульса или частота дыхания согласно предшествующему уровню техники. Однако дополнительные измерения, такие как, например, эхоизображения органов, анализы крови или что-либо подобное, невозможны в системах с повышенным или изменяющимся ускорением. Причина такова, что в силу изменения ускорения, органы тела также испытывают движение в теле и, по меньшей мере, частично изменяют положение. Более того, части тела или все тело, возможно, также перемещаются в силу воздействия повышенного ускорения. Если измерительные инструменты установлены статически устойчиво на теле, может случиться так, что результаты измерения фальсифицируются описанными изменениями в теле и, таким образом, не предоставляют важной информации. Чтобы улучшить исследование или лечение, необходимо, таким образом, предусмотреть возможность регулировок измерительного инструмента. Однако поскольку лечение или исследование медицинским персоналом, например, невозможно в системах с повышенным или изменяющимся ускорением, действия должны выполняться манипуляторами или роботами. Более того, дистанционная операция по защите рабочего персонала также предпочтительна при использовании источника радиации на функциональной головке, например, для рентгеновских снимков.
Однако роботы или манипуляторы, соответствующие предшествующему уровню техники, не подходят для выдерживания нагрузок, например, в центрифуге или в чем-либо подобном. Более того, роботы или манипуляторы, соответствующие предшествующему уровню техники, содержат органы управления, которые не подготовлены и не предназначены для того, чтобы учитывать повышенные или изменяющиеся ускорения. Более того, в исследованиях испытуемых объектов роботами имеется риск получения травм, возникающих в случае неправильных действий робота.
Задачей изобретения является создание подвижного устройства и манипулятора, который пригоден и подготовлен, чтобы делать возможным исследование или лечение человека или животного при повышенном или изменяющемся ускорении. Эта задача включает в себя подзадачи, заключающиеся в том, что исследование можно проводить с дистанционным управлением из положения вне подвижного устройства, в том, что исследование проводится манипулятором, который выполнен с возможностью использования в системах с изменяющимся или повышенным ускорением, и в том, что устраняется непредумышленное повреждение тела манипулятором.
Задача согласно изобретению решается тем, что функциональную головку можно перемещать относительно основания по множеству степеней свободы, перемещаемыми приводными устройствами, и тем, что, по меньшей мере, одно приводное устройство является приводным устройством, ограничивающим усилие.
С этой целью можно предусмотреть, чтобы контактное усилие между функциональной головкой и телом систематически ограничивалось приводным устройством, ограничивающим усилие, в частности, чтобы контактное усилие ограничивалось посредством нагнетательного клапана приводного устройства, ограничивающего усилие, чтобы контактное усилие можно было выбирать и/или чтобы нагнетательный клапан являлся управляющим клапаном. Более того, устройство согласно изобретению содержит признаки, заключающиеся в том, что когда выбранное максимальное контактное усилие превышается, подвижный элемент приводного устройства, ограничивающего усилие, по существу отсоединяется от основного элемента приводного устройства, ограничивающего усилие. Отсоединение происходит, например, путем открывания клапана сброса давления.
Кроме того, устройство согласно изобретению предпочтительно содержит признаки, которые заключаются в том, что приводные устройства управляются и/или регулируются одной или более системами управления, и что приводные устройства и системы управления подготовлены для работы с повышенным и/или изменяющимся ускорением, что позиционирующее и/или контактное усилие функциональной головки, соприкасающейся с телом, меняется относительно тела под воздействием повышенного и/или изменяющегося ускорения, и/или что функциональную головку можно направлять к телу в выбираемом положении.
Дополнительные признаки согласно изобретению могут заключаться в том, что приводное устройство, ограничивающее усилие, содержит один или более беспоршневых приводов, одно или более устройств воздушной мышцы, один или более устройств пневмобаллона, одно или более устройств пневматического цилиндра с пневматическими цилиндрами с поршнями, установленными по существу свободными от трения прилипания, одно или более электрических линейных устройств, не имеющих зубчатой передачи, с якорями, установленными по существу свободными от трения прилипания, и/или одну или более направляющих, что приводные устройства содержат линейную ось, реечный привод, параллельный кинематический привод, шестиногую конструкцию, треногу, роботизированную руку, вращающийся привод, привод карданного вала и/или Декартов привод, и/или что каждое приводное устройство содержит основной элемент, подвижный элемент и привод для перемещения подвижного элемента относительно основного элемента по степени или основным степеням свободы, и/или что приводные устройства установлены последовательно, при этом подвижный элемент приводного устройства в каждом случае соединяется или сцепляется с основным элементом следующего приводного устройства.
Кроме того, можно предусмотреть, чтобы перемещение функциональной головки относительно основания могло бы быть дистанционно-управляемым или автоматизированным, в частности, дистанционно-управляемым или автоматизированным посредством одной или более систем управления и/или одного или более устройств ввода данных, чтобы устройство ввода данных содержало устройства ввода, такие как джойстики, ползунки, информационные перчатки, компьютерные программы, автоматизированные программы и/или подобные устройства, чтобы функциональная головка содержала компоненты, устройства для исследования и/или лечения, такие как, например, ультразвуковая измерительная головка, оптические записывающие приборы, акустические записывающие приборы, приборы для измерения сопротивления, устройство для инъекций, устройство для жидкостного анализа, прибор для забора крови, аналитический прибор, прибор для химического анализа, источник излучения, например, рентгеновских лучей, гамма- или инфракрасного излучения, источник лазерного излучения, приборы для взятия выборки, приборы для измерения температуры, приборы для измерения тока, детекторы излучения, приборы для эндоскопического исследования, приборы для оптического исследования глаз и/или дополнительные радиологические, инвазивные или контактные приборы для диагностических или лечебных целей.
Также признаки согласно изобретению могут заключаться в том, что манипулятор согласно изобретению расположен на подвижном устройстве согласно изобретению, что подвижное устройство является пилотажным тренажером, однозвенной центрифугой, центрифугой с перемещающейся вверх кареткой, тренировочной центрифугой, тренировочной центрифугой для использования при нулевой гравитации, медицинской центрифугой или медицинской центрифугой с множеством кабинок, расположенных свободно вращающимися вокруг первой оси вращения, чтобы был предусмотрен основной несущий элемент, сцепленный или соединенный с первым несущим элементом, упомянутый основной несущий элемент соединен, сцеплен или способен быть соединенным с основанием манипулятора, и/или чтобы функциональная головка могла перемещаться посредством приводного устройства, ограничивающего усилие, или посредством приводных устройств, ограничивающих усилие, по существу по тангенциальной плоскости главной оси.
Дополнительные признаки заключаются в том, что функциональную головку во время вращения вокруг главной оси можно направить к телу или расположить относительно тела дистанционно-управляемым или автоматизированным образом путем приведения в действие манипулятора посредством устройства ввода данных, что функциональную головку во время вращения вокруг главной оси можно направить к телу, можно прижать к телу или расположить относительно тела в выбираемом положении и/или с выбираемым контактным усилием дистанционно-управляемым или автоматизированным образом приведением в действие манипулятора посредством устройства ввода данных, что расположение и/или контактное усилие между функциональной головкой и телом во время вращения вокруг главной оси может изменяться дистанционно-управляемым или автоматизированным образом путем приведения в действие манипулятора посредством устройства ввода данных, и/или что контактное усилие систематически ограничивается, в частности, что контактное усилие ограничивается нагнетательным клапаном приводного устройства, ограничивающего усилие, при этом контактное усилие является выбираемым и при этом нагнетательный клапан является управляющим клапаном.
Если максимальное контактное усилие превышается, подвижный элемент приводного устройства, ограничивающего усилие, по существу отсоединяется, предпочтительно отсоединяется в направлении действия, от основного элемента приводного устройства, ограничивающего усилие.
Согласно изобретению предусматривается манипулятор, который может направлять функциональную головку к телу под воздействием повышенного или изменяющегося ускорения. Такая функциональная головка содержит компоненты, устройства для исследования и/или лечения, такие как, например, ультразвуковая измерительная головка, оптические записывающие приборы, акустические записывающие приборы, приборы для измерения сопротивления, устройство для инъекций, устройство для жидкостного анализа, прибор для забора крови, аналитический прибор, прибор для химического анализа, источник излучения, например, рентгеновских лучей, гамма- или инфракрасного излучения, источник лазерного излучения, приборы для взятия выборки, приборы для измерения температуры, приборы для измерения тока, детекторы излучения, приборы для эндоскопического исследования, приборы для оптического исследования глаз и/или дополнительные радиологические, инвазивные или контактные приборы для диагностических или лечебных целей.
Задачи, такие как, например, ультразвуковые изображения органов и/или кровеносных сосудов, прослушивание функции сердца и/или легких, измерения сопротивляемости кожи, изготовление рентгеновских снимков, иррадиация, нагрев, например, для увеличения потока крови, измерение потока крови в более глубокой ткани, измерения жира тела, измерения тока мозга, кардиологические измерения, инвазивные или контактные задачи для диагностических или лечебных целей, можно выполнить устройством согласно изобретению.
Манипулятор содержит одно или более приводных устройств, которые обеспечивают перемещение функциональной головки относительно основания. Манипулятор выполнен таким образом, чтобы устранить непредумышленное повреждение тела функциональной головкой и/или манипулятором. С этой целью предпочтительно предусмотрен системный безопасный механизм, который ограничивает усилие, которое прилагает манипулятор к телу. С этой целью, по меньшей мере, одно приводное устройство манипулятора выполнено в виде гибкого или чувствительного приводного устройства. Примерами таких приводных устройств, ограничивающих усилие, являются, например устройства, которые содержат исполнительные элементы по существу свободные от трения прилипания, такие как воздушные мышцы, пневматические исполнительные элементы, пневмобаллоны и т.д., с приборами такого типа подвижный элемент можно переместить относительно основного элемента изменением длины упругого элемента, такого как, например, воздушная мышца или пневмобаллон. Дополнительно устройство может содержать датчик пути, а также упругий элемент, такой как, например, пружина, действующая против воздушной мышцы или пневмобаллона. Кроме датчика пути также предпочтительно предусматривается датчик усилия, который используется для управления и ограничения усилия, прикладываемого приводным устройством. Исполнительный элемент предпочтительно можно привести в действие пневматически давлением газа, в частности, давлением воздуха. С этой целью газ, сжатый в компрессоре, вводится в упругий элемент. Такое введение давления в упругий элемент регулируется и/или управляется управляющим клапаном. Для систематического ограничения усилия давление газа может действовать через клапан сброса давления таким образом, что когда нужное максимальное усилие достигается, например, подвижным элементом на теле, клапан сброса давления открывается и, таким образом, ограничивает давление и усилие. Давление прямо пропорционально приложенному усилию на участке, к которому давление прикладывается.
Примерами устройств, ограничивающих усилие, являются:
- устройства беспоршневых пневматических приводов, таких как вышеупомянутые устройства пневмобаллона с цилиндром сильфонного типа или устройства воздушной мышцы с воздушной мышцей,
- устройства пневмобаллона с цилиндром сильфонного типа с противодействующей пружиной,
- устройства воздушной мышцы с противодействующей спиральной пружиной,
- устройство множества цилиндров сильфонного типа или воздушных мышц,
- устройства пневматических цилиндров с пневматическим цилиндром с поршнем, установленным свободным от трения прилипания, такие как, например, газовые цилиндры с графитными поршнями,
- электрические линейные устройства, не имеющие зубчатую передачу, с якорями, установленными по существу свободными от трения прилипания, с воздушным креплением или с магнитным креплением,
- устройство множества приводов, такие как пневматические цилиндры, устройства воздушной мышцы и/или устройств пневмобаллонов в виде параллельного кинематического устройства.
- устройства пневматических приводов, например, с пневматическими пружинами, упругими элементами, спиральными пружинами, направляющими,
- комбинации одного или более вышеупомянутых устройств,
- и так далее.
Приводное устройство, ограничивающее усилие, в частности, приводное устройство, ограничивающее усилие, с одним или более вышеупомянутых пневматических приводов, при необходимости, может содержать одну или более направляющих. Эти направляющие служат для стабилизации перемещения подвижного элемента по соответствующей степени свободы. Эти направляющие также пригодны и подготовлены для использования под воздействием повышенного и/или изменяющегося ускорения. Примерами таких направляющих являются линейные направляющие, вращающиеся направляющие и, в частности, направляющие, которые по существу свободны от трения прилипания.
Помимо регулирования приводов, внимание следует уделить трению и инерции движения подвижного элемента, чтобы ограничить усилие. В частности, исполнительные элементы, которые по существу свободны от трения прилипания, пригодны для использования в качестве приводного устройства, ограничивающего усилие в манипуляторе согласно изобретению.
Управление перемещением функциональной головкой, в частности, управление приводами, имеет место посредством системы управления. Система управления подсоединяется к отдельным приводам и подготовлена к управлению или регулированию приводов. С этой целью каждой осью приводных устройств можно управлять или иметь возможность управлять по отдельности, или можно предусмотреть многоосное управление. Следовательно, при отдельном управлении осями каждой линейной степенью свободы можно управлять по отдельности. Более того, каждой вращательной степенью свободы можно управлять по отдельности.
В случае многоосного управления множеством осей управляют одновременно посредством одного или более устройствами ввода данных. Характеристики перемещения манипулятора можно приспособить путем преобразования координатной системы управления в произвольную точку. Точку управления можно предпочтительно разместить в точке соприкосновения функциональной головки с телом.
Кроме того, можно предусмотреть устройство ввода данных. Устройство ввода данных по существу используется для ввода команд к системе управления, которые передаются, например, для выполнения перемещения приводов манипулятора. Такими устройствами ввода информации, например, могут являться джойстики, ползунки, информационные перчатки, оптические записывающие устройства, а также компьютеры и/или компьютерная программа. Предпочтительно, устройства ввода информации можно располагать вне подвижного устройства, например, в диспетчерской. Посредством устройств ввода информации функциональную головку можно направить дистанционно-управляемым или автоматизированным образом к телу, чтобы выполнять исследования и/или лечение.
Чтобы повысить легкость управления, устройства ввода данных можно также обеспечить управляемым или регулируемым усилием настройки. Эти устройства ввода, известные под термином «обратная связь по усилию» передают сигналы усилий, доставляемых манипулятором или функциональной головкой к устройствам ввода данных. Создается прямой «чувствительный» контакт, когда происходит операция. Более того, можно предусмотреть оптическое записывающее устройство, например, видеокамеру, которая передает видеосигнал на монитор. С помощью этого монитора оператор также может визуально наблюдать исследование. Оптическое записывающее устройство предпочтительно присоединено к основному несущему элементу, к основанию манипулятора и/или фиксирующему устройству. Предпочтительно монитор находится в зоне устройства ввода данных.
Манипулятор определен как устройство, которое может перемещать функциональную головку относительно основания по одной или более степеням свободы. Манипулятор является управляемым и/или регулируемым и предпочтительно дистанционно-управляемым. Манипулятор может содержать различные приводные устройства, которые установлены последовательно или параллельно. Установка приводных устройств последовательно определяется как установка, при которой второе приводное устройство предусмотрено на первых подвижных компонентах первого приводного устройства. Перемещение второго приводного устройства, таким образом, зависит от перемещения первого приводного устройства.
Перемещение первого приводного устройства, таким образом, зависит от перемещения второго приводного устройства. Обеспечение параллельности приводных устройств соответствует, например, параллельному кинематическому устройству. В параллельном кинематическом устройстве степени свободы разъединены в кинематическом смысле, а соединение посредством управления, однако, может иметь место в случае многоосных органов управления. Манипулятор согласно изобретению подготовлен и пригоден для использования в системах с повышенным и/или изменяющимся ускорением.
Повышенное и/или изменяющееся ускорение определяется как состояние ускорения, при котором манипулятор испытывает повышенные или изменяющиеся усилия ускорения. В частности, это означает, что манипулятор перемещается сам по себе. В результате такого перемещения, в частности, в результате внесения изменений в перемещение, усилия ускорения действуют на манипулятор и функциональную головку, причем упомянутые усилия ускорения отклоняются от усилий ускорения окружающей среды, например, усилий в силу гравитационного ускорения. Ускорения больше нуля рассматриваются в качестве ускорений, повышенных в пространстве невесомости, поскольку ускорение окружающей среды по существу равно нулю. Повышенное и/или изменяющееся ускорение предпочтительно рассматривается в качестве состояния постоянно повышенного ускорения, которое возникает, например, в центрифуге. Под воздействием гравитационного ускорения таким ускорением могло бы быть, например, повышенное ускорение приблизительно от 1.2G до 6G, т.е. в от 1.2 до 6 раз больше ускорения в силу гравитации. В подвижных устройствах согласно изобретению, например, в центрифуге, могут, однако, возникать ускорения до 15G и больше. В пространстве невесомости повышенное ускорение могло бы соответствовать, например, ускорениям приблизительно от 0,1G до 6G и больше. Манипулятор предпочтительно вращается по орбите вокруг главной оси. Ускорение относительно окружающей среды повышается вращением на определенном стандартном расстоянии от главной оси.
Приводное устройство, ограничивающее усилие, можно перемещать по тангенциальной плоскости главной оси. Тангенциальная плоскость определяется как плоскость, которая по существу соответствует перпендикулярной плоскости на полярном радиусе через главную ось. Полярный радиус предпочтительно расположен перпендикулярно главной оси. Следовательно, тангенциальной плоскостью предпочтительно является тангенциальная плоскость орбиты вокруг главной оси, причем тангенциальная плоскость также предпочтительно продолжается параллельно главной оси. Направление полярного радиуса по существу соответствует направлению вектора ускорения, воздействующего на тело или манипулятор, или направлению вектора ускорения, который генерируется подвижным устройством. Например, в случае чисто линейно перемещаемых кареток тангенциальная плоскость определяется как перпендикулярная плоскость генерируемого вектора ускорения.
Направление воздействия приводного устройства, ограничивающего усилие, например, при ультразвуковом исследовании, может простираться перпендикулярно поверхности тела, или также может располагаться под углом от 30° до 50° к телу.
Устройство, которое может содержать различные инструменты, датчики, записывающие устройства или аналитические устройства называется функциональной головкой. Можно предусмотреть множество таких компонентов или также всего лишь один.
Согласно изобретению функциональную головку можно направить манипулятором в различные положения и с помощью различных контактных усилий к телу и вдоль тела. Более того, положение функциональной головки относительно тела можно изменять повышенным и/или изменяющимся ускорением. Манипулятор предпочтительно содержит шесть степеней свободы. Перемещение приводных устройств предпочтительно происходит с позиционным управлением. Перемещение приводных устройств, ограничивающих усилие, предпочтительно происходит с управлением усилием.
Более того, контактное усилие или прижимающее усилие функциональной головки на тело можно удерживать при постоянной или приведенной величине манипулятором согласно изобретению и приводным устройством, ограничивающим усилие. Величину можно дистанционно ввести, например, через устройство ввода данных или автоматически предварительно выбрать программой. Контактное или прижимающее усилие предпочтительно независимо или не связано с перемещением подвижного устройства и ускорением, воздействующим на тело и/или манипулятор. Контактное усилие можно изменять, выбирать и/или ограничивать через устройство ввода данных. Чтобы управлять перемещением, в частности вращением функциональной головки, можно предусмотреть, чтобы точка вращения функциональной головки находилась в точке контакта функциональной головки с телом. Управление можно выполнить, при необходимости, управлением линейных приводов или в виде многоосного управления.
Согласно изобретению манипулятор предусматривается на подвижном устройстве, если это уместно. Примерами подвижных устройств являются пилотажные тренажеры, центрифуги, центрифуги с перемещающейся кареткой, с линейно перемещающейся кареткой медицинские центрифуги, тренировочные центрифуги и т.д. Практическими применениями манипуляторов в сочетании с подвижным устройством являются, например, исследование людей в однозвенных центрифугах или исследование людей в линейно перемещаемых устройствах, например, при продольной динамической имитации. Более того, подвижное устройство согласно изобретению можно предусмотреть в пространстве невесомости, например, на космических станциях или космических кораблях. В особенности в случае длительного времени, проведенного людьми или животными в космическом пространстве, имитация ускорений, например, посредством центрифуги, является необходимой, чтобы предотвратить мышечную атрофию и ослабление костной системы. С этой целью, например, одну или более кабинок устанавливают свободно вращающимися вокруг главной оси. При вращении отдельных кабинок на определенном стандартном расстоянии, люди, находящиеся в кабинках испытывают определенное ускорение. При наличии тренировочных устройств, таких как, например, эргонометр, тренировочные единицы, таким образом, можно выполнять в пространстве невесомости под воздействием нормального, изменяющегося или повышенного ускорения. Такие медицинские центрифуги, а также тренировочные центрифуги можно также использовать для научных целей, на земле под воздействием гравитационного ускорения. Такие подвижные устройства также соответствуют использованию настоящего изобретения.
Ниже будет описано изобретение более подробно с помощью конкретных, представленных в схематичном виде примеров вариантов осуществления изобретения.
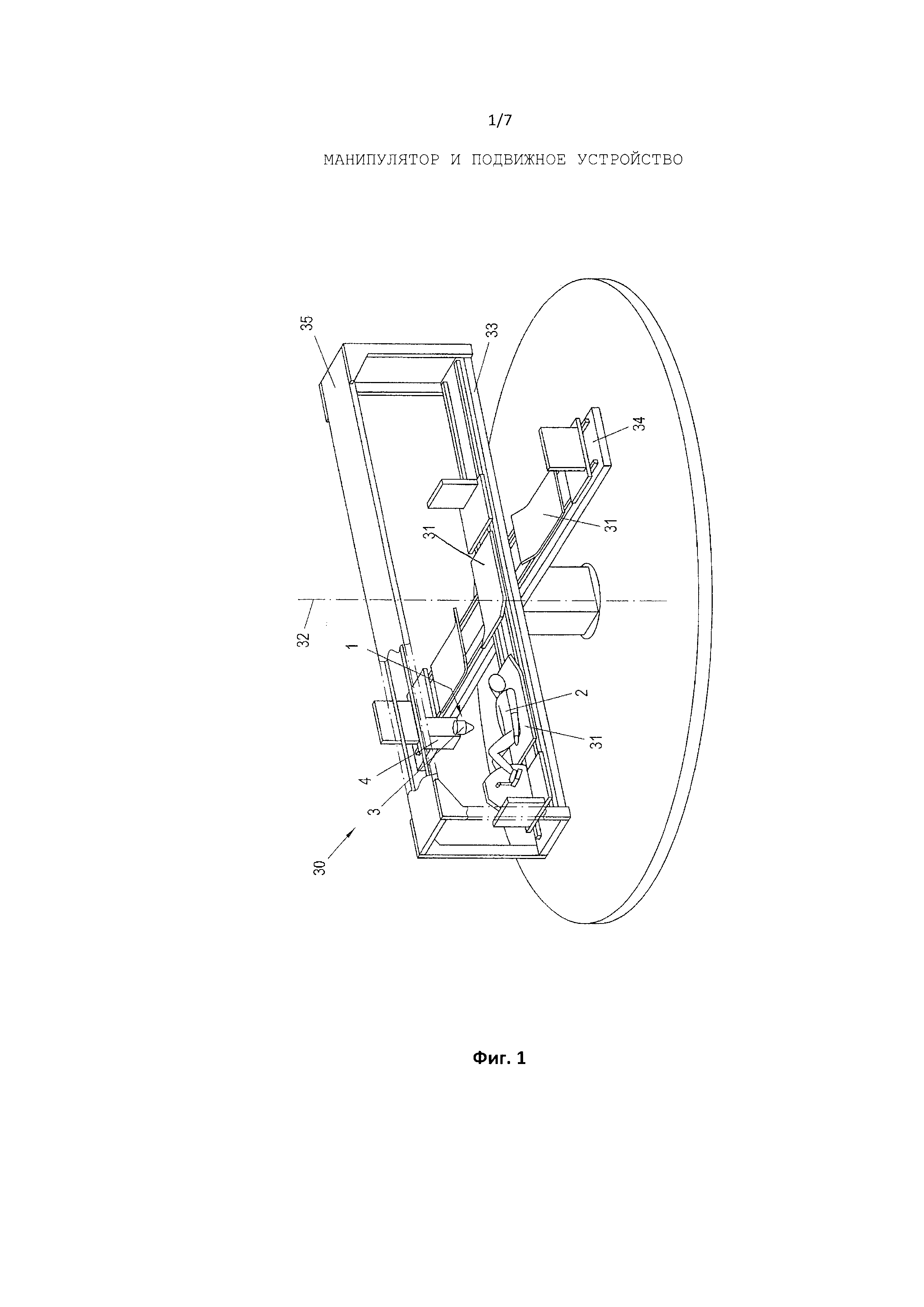
На фиг. 1 показан схематичный косой вид подвижного устройства согласно изобретению, содержащего манипулятор согласно изобретению.
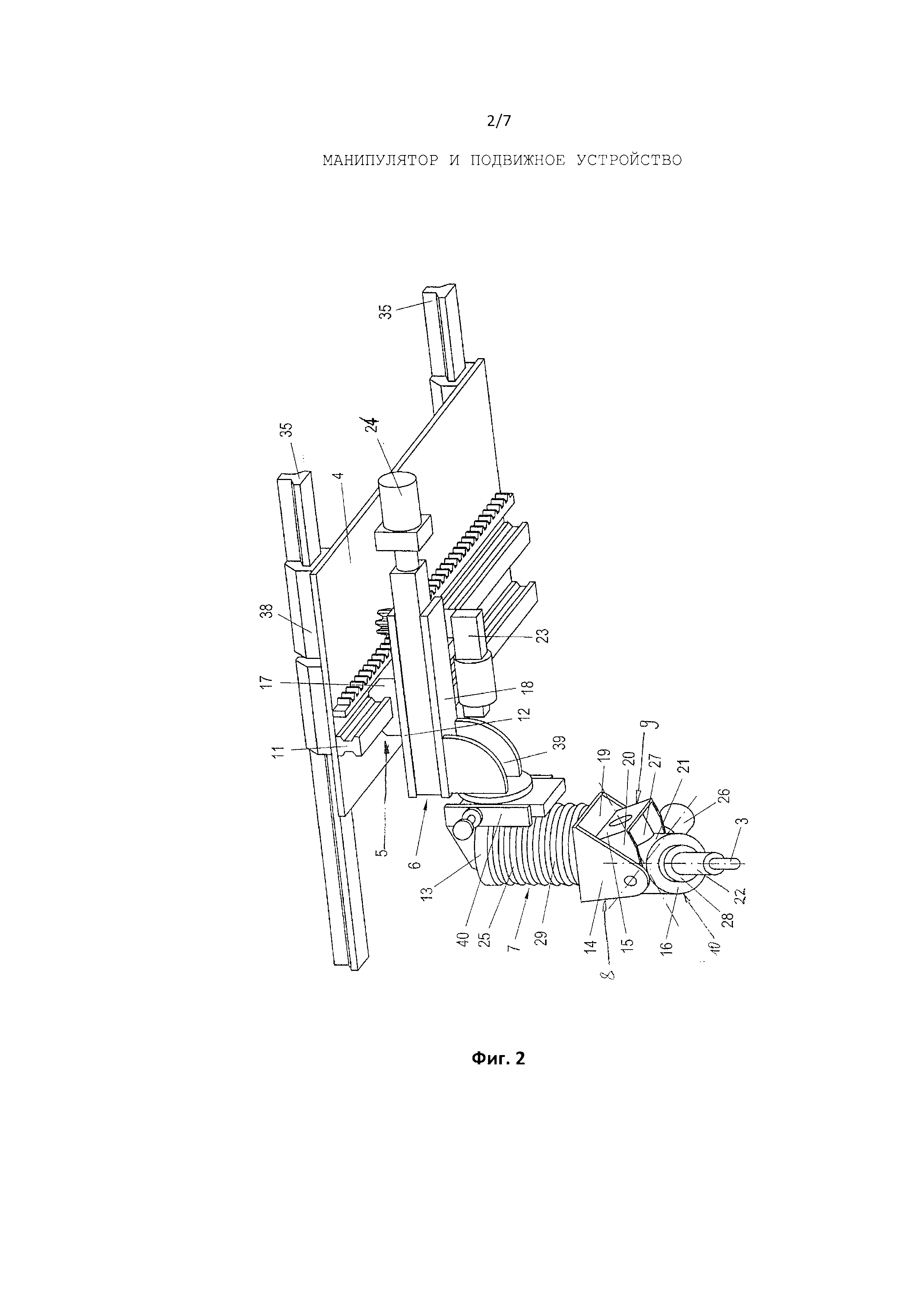
На фиг. 2 показан возможный вариант манипулятора.
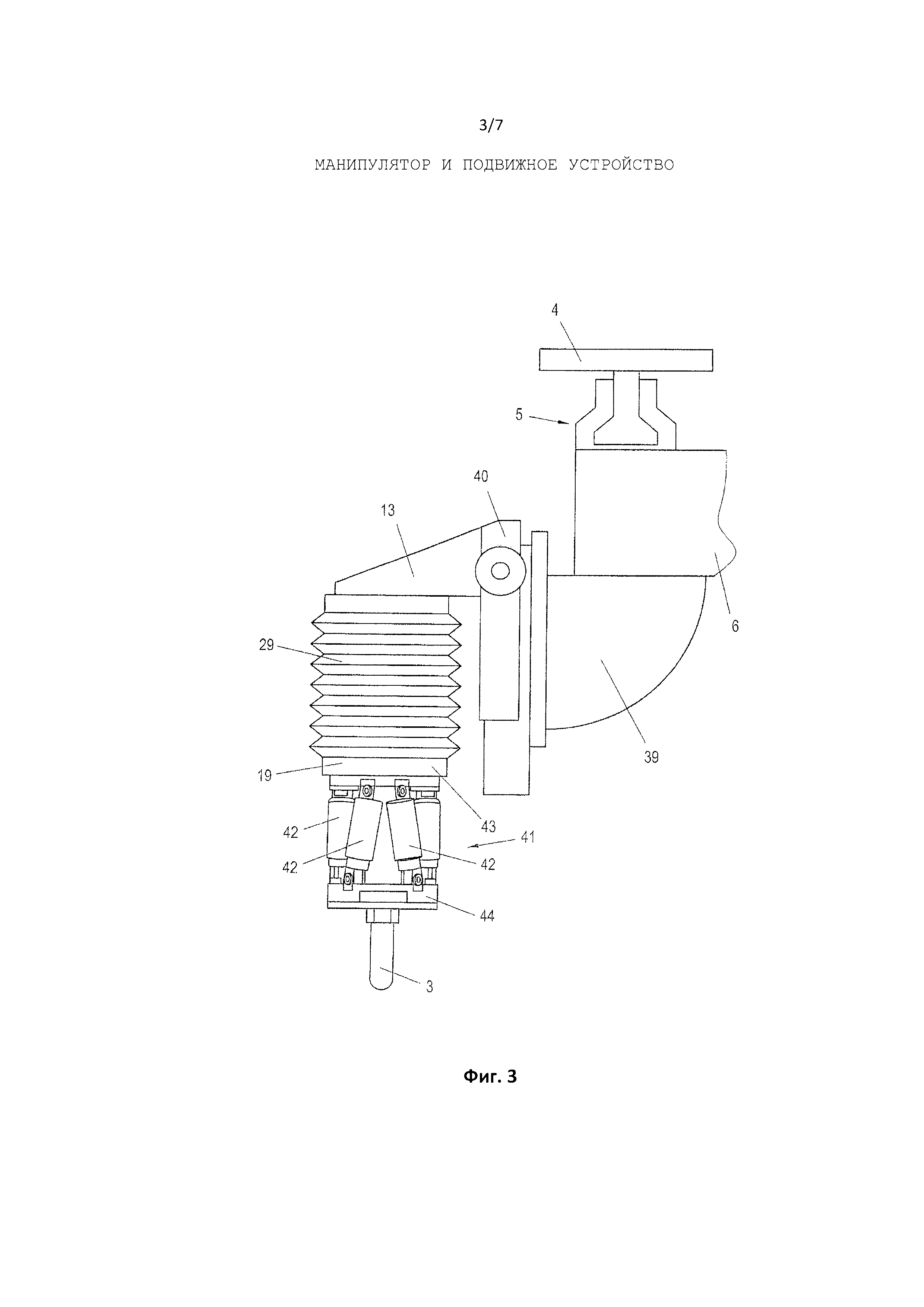
На фиг. 3 показан дополнительный возможный вариант манипулятора, в частности, деталь приводного устройства, ограничивающего усилие.
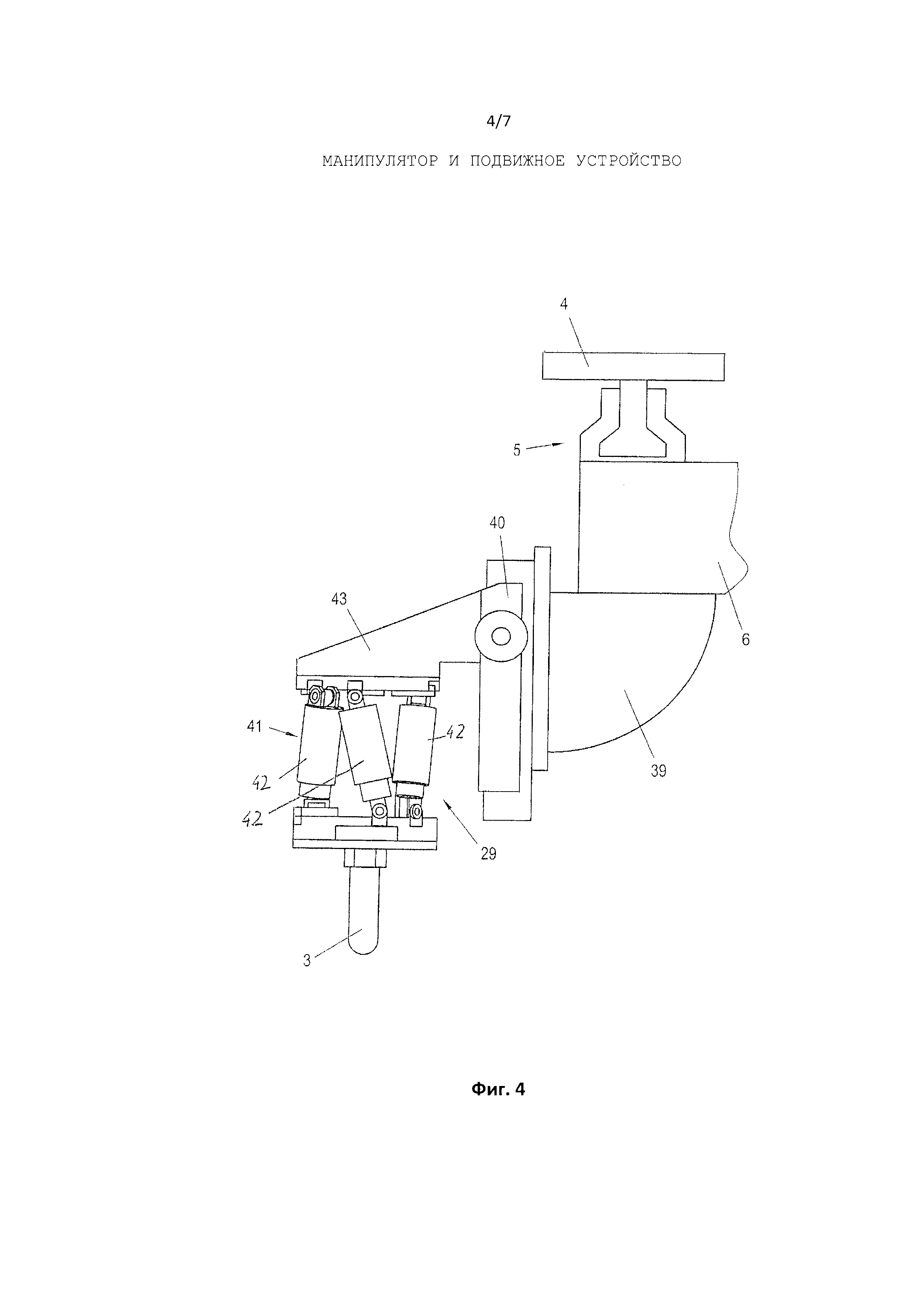
На фиг. 4 показан дополнительный вариант манипулятора с приводным устройством, ограничивающим усилие.
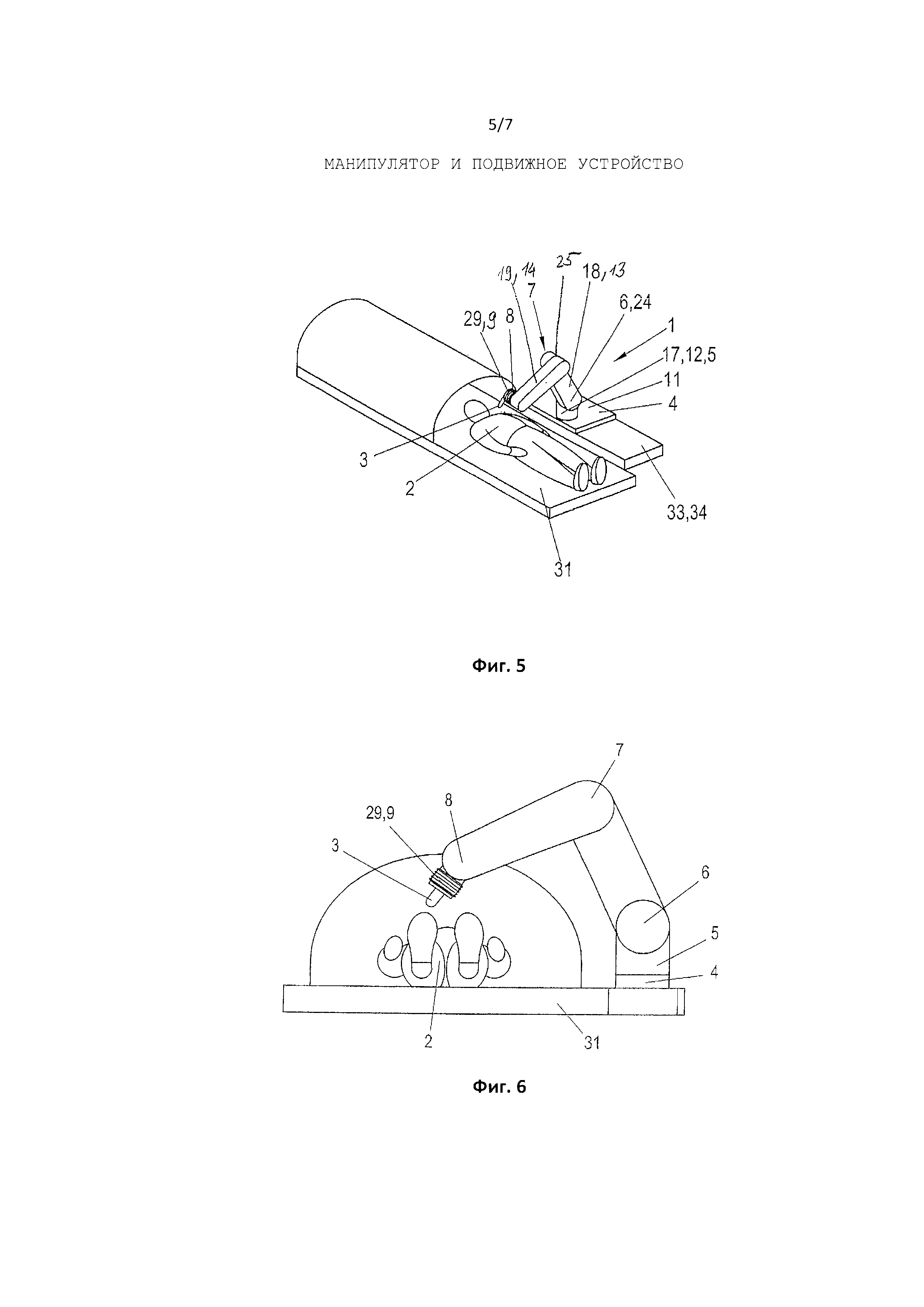
На фиг. 5 показан возможный вариант манипулятора с частями подвижного устройства в косом виде.
На фиг. 6 показан тот же манипулятор, что и на фиг. 5, но в другом виде.
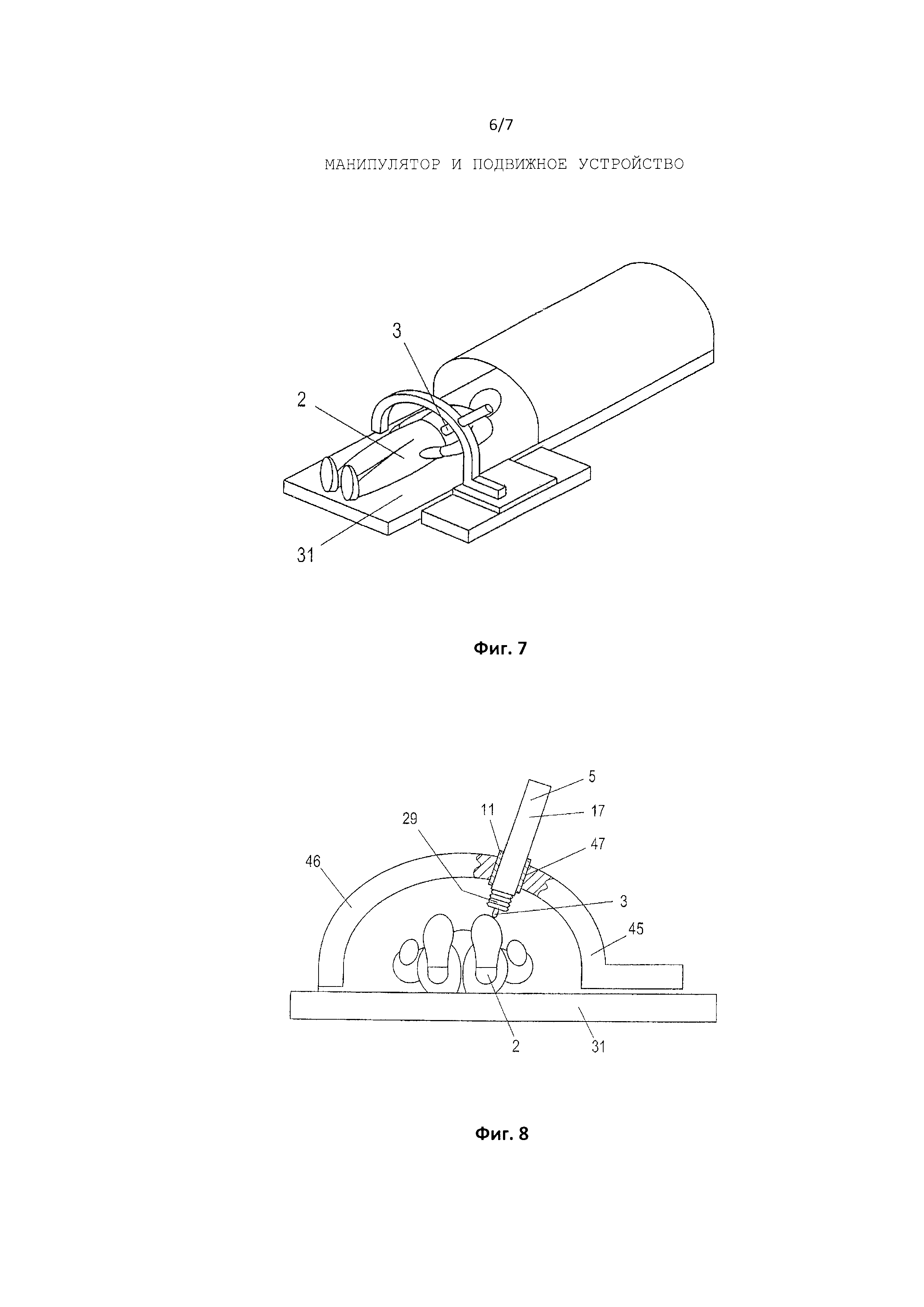
На фиг. 7 показан дополнительный вариант возможного манипулятора с частями подвижного устройства в схематичном косом виде.
На фиг. 8 показан тот же манипулятор, что и на фиг. 7, но в другом виде.
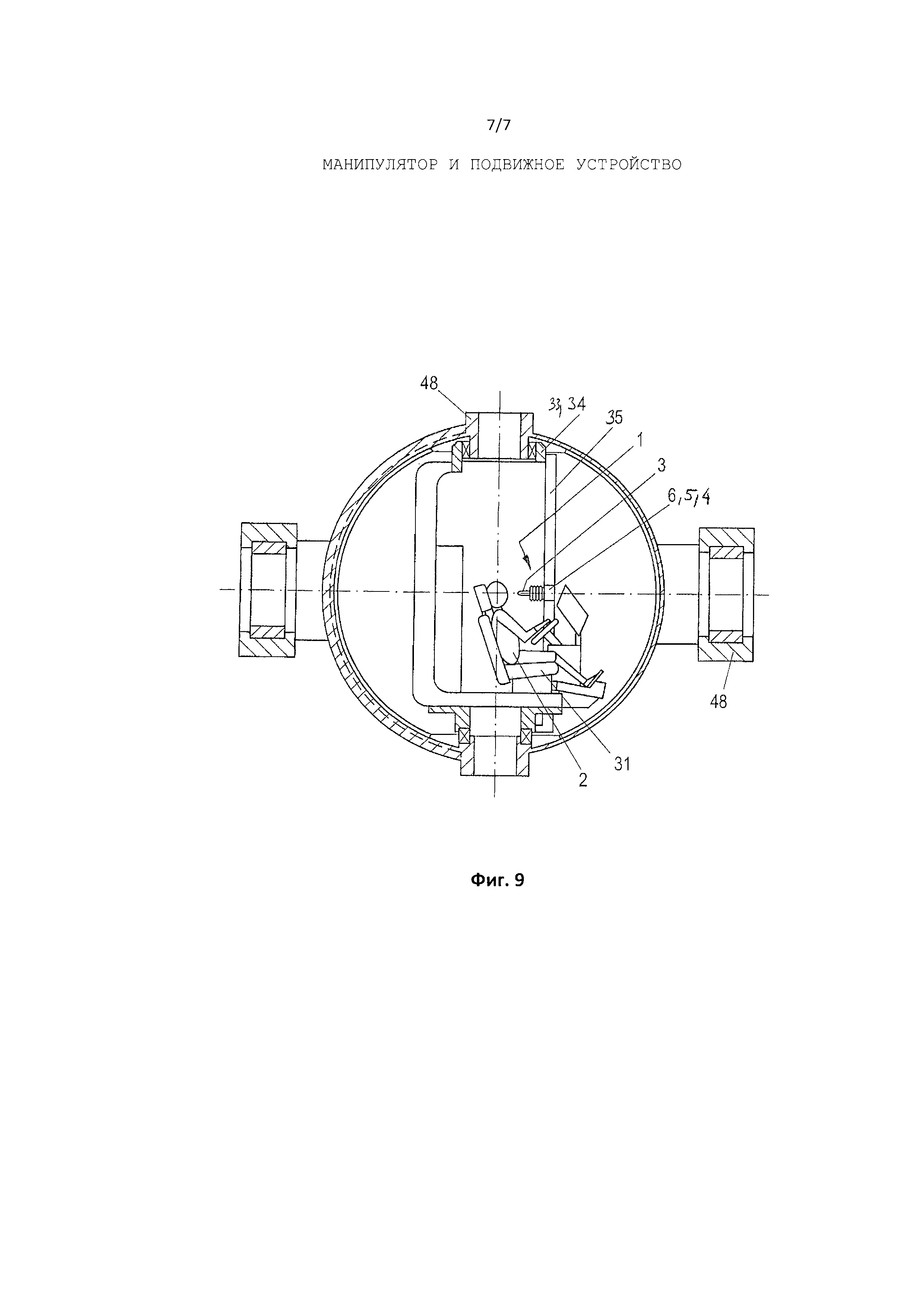
На фиг. 9 показан дополнительный вариант манипулятора и части подвижного устройства
На фиг. 1 показана схема подвижного устройства 30, содержащая множество фиксирующих устройств 31, которые расположены с возможностью вращения вокруг главной оси 32. Схема соответствует возможному подвижному устройству медицинской центрифуги или тренировочной центрифуге для использования в состоянии невесомости или под воздействием гравитационного ускорения.
Тело 2 испытуемого объекта лежит на фиксирующем устройстве 31. В настоящем варианте фиксирующее устройство 31 расположено с возможностью смещения вдоль первого несущего элемента 33. При вращении первого несущего элемента 33 вокруг главной оси 32, тело 2 испытывает повышенное ускорение. Ускорение составлено из главного ускорения, обычно гравитационного ускорения и радиального ускорения. Во время использования в состоянии невесомости, основное ускорение по существу равняется нулю. Величина радиального ускорения по существу зависит от угловой скорости и стандартного расстояния от главной оси 32. Чтобы можно было изменить результирующее ускорение на тело, по меньшей мере, одно, предпочтительно все устройства 31 ускорения выполнены с возможностью смещения в настоящем изобретении, при этом направление смещения по существу простирается радиально относительно главной оси 32 и/или по первому или второму несущему элементу 33, 34. Основной несущий элемент 35 жестко прикреплен к первому несущему элементу 33. В настоящем изобретении упомянутый основной несущий элемент содержит рельсовые участки, на которых расположено основание 4 манипулятора 1 с возможностью линейного смещения. Это смещение основания 4 на основном несущем элементе 35 предпочтительно используется для грубой настройки и позиционирования манипулятора 1 в зоне тела 2 человека. Функциональная головка 3 расположена подвижно посредством приводных устройств на основании 4 манипулятора 1. Изображение манипулятора 1 на фиг.2 очень упрощено и представлено в схематичном виде. Для проведения лечения или исследований на теле человека или животного, функциональную головку манипулятора 1 можно направить к телу 2 человека с помощью системы управления 36 (система здесь не представлена). Это происходит, например, через устройство ввода данных. При необходимости вращением подвижного устройства можно также управлять с помощью той же системы управления.
Подвижное устройство 30 на фиг. 1 соответствует схематичному изображению устройства для медицинского исследования или лечения человека или животного под воздействием повышенного или изменяющегося ускорения. С этой целью множество фиксирующих устройств 31 предусмотрено на первом и втором несущем элементе 33, 34, расположенных в виде креста. Выполнение или загрузку испытаний, например, можно осуществить под повышенными усилиями ускорения на таком подвижном устройстве. Фиксирующие устройства 31 предпочтительно присоединены подвижным образом к первому и второму несущим элементам. В результате перемещения фиксирующего устройства с телом 2 человека, результирующее усилие ускорения, действующее на человека, можно уменьшить без влияния на испытание на трех оставшихся фиксирующих устройствах. Предпочтительно подвижное устройство вращается вокруг главной оси с постоянной угловой скоростью. Результирующее ускорение, действующее на тело 2 можно изменить выбором расстояния до тела 2 от этой главной оси 32.
Чтобы можно было проводить исследования или лечение на теле 2 при таких обстоятельствах, предусмотрена функциональная головка 3 манипулятора 1, чтобы перемещаться на основном несущем элементе 35. С помощью системы управления и устройств ввода данных, функциональную головку 3 можно направить к телу 2 манипулятором. Например, можно взять и сделать анализ образцов крови, можно получить ультразвуковые изображения органов с повышенной нагрузкой или можно провести дополнительные испытания с помощью функциональной головки 3.
Как уже было упомянуто, абсолютно существенным для этой цели является то, что устраняется непредумышленное повреждение человека 2 функциональной головкой. С этой целью манипулятор 1 согласно изобретению содержит, по меньшей мере, одно приводное устройство, ограничивающее усилие, которое имеет мобильную степень свободы, которая является ограничивающей усилие, т.е. гибкой, чувствительной или «податливой».
На фиг. 2 показан подробный косой вид манипулятора 1 согласно изобретению и части подвижного устройства 30. Основание 4 соединено рельсами с основным несущим элементом 35. С этой целью предусмотрены направляющие элементы 38 основания 4, чтобы линейно перемещаться по рельсовым частям основного несущего элемента 35. Таким образом, основание 4 предпочтительно смещается относительно основного несущего элемента 35 и блокируется в нужном положении. В настоящем варианте такое смещение используется для грубого позиционирования манипулятора 1 в зоне тела 2. Первое приводное устройство 5 предусмотрено на основании 4. Упомянутое приводное устройство содержит первый основной элемент 11, первый подвижный элемент 17 и первый приводной элемент 23 для перемещения первого подвижного элемента 17 относительно первого основного элемента 11. В настоящем варианте первым приводным устройством является по существу линейная ось. С этой целью направляющие элементы первого подвижного устройства 17 входят в канавки, предпочтительно в канавки первого основного элемента 11, являющегося рельсовым. Первый привод 23 предусмотрен для перемещения, при этом упомянутый первый привод подготовлен для перемещения первого подвижного элемента 17 относительно первого основного элемента 11. В настоящем варианте этим является зубчатая рейка, предусмотренная на первом основном элементе 11, и зубчатое колесо для зацепления в зубчатой рейке, при этом упомянутое зубчатое колесо приводится в действие первым приводом 23 и предусмотрено на первом подвижном элементе 17. Первым приводом 23 можно управлять и/или регулировать системой 36 управления. Если необходимо, можно предусмотреть два рельсовых основных элемента для повышения устойчивости.
Таким образом, посредством первого приводного устройства 5 предусматривается первая регулируемая степень свободы для перемещения функциональной головки 3 относительно основания 4. Второе приводное устройство 6 предусмотрено на первом подвижном элементе 17. Упомянутый второй приводной элемент содержит второй основной элемент 12, который присоединен по существу жестко к первому подвижному элементу 17. Более того, второе приводное устройство 6 содержит второй привод 24 для перемещения второго подвижного элемента 18 относительно второго основного элемента 12. Таким образом, посредством второго приводного устройства 6 предусматривается дополнительная регулируемая степень свободы для перемещения функциональной головки 3 относительно основания 4. В настоящем варианте вторым приводным устройством является линейная ось. Линейная ось запускает перемещение по линейной степени свободы, при этом перемещение управляется и/или регулируется системой 36 управления. Второй подвижный элемент 18, таким образом, перемещается линейно относительно второго основного элемента 12 посредством привода 24. В результате настоящего расположения двух линейных осей первого и второго приводных устройств 5 и 6, функциональная головка 3 может таким образом перемещаться по плоскости в двумерном пространстве. Направление перемещения первого приводного устройства 5 и направление перемещения второго приводного устройства 6 предпочтительно по существу перпендикулярны друг другу. В настоящем варианте оба подвижные устройства предпочтительно перемещаются в перпендикулярной плоскости главной оси.
Третье приводное устройство 7 предусмотрено на втором подвижном элементе 18 второго приводного устройства б. В настоящем варианте соединение третьего приводного устройства 7 со вторым подвижным элементом 18 происходит посредством поворотного устройства 39 и подающего устройства 40. Поворотное устройство 39 и подающее устройство 40 являются по существу жесткими соединениями, которые под действием болта, например, используются для грубой настройки положения третьего приводного устройства 7 относительно второго приводного устройства 6. Посредством поворотного устройства 39 функциональная головка 3 и третье приводное устройство 7 могут отворачиваться, чтобы, например, облегчить вход и выход человека. Подающее устройство 40 используется для грубой настройки расстояния функциональной головки относительно тела 2 человека. Поворотное устройство 39 и подающее устройство 40 являются предпочтительно жесткими и не приводятся в действие во время нормальной работы. Альтернативно, однако, третье приводное устройство, в частности третий основной элемент, также может быть жестко присоединен ко второму подвижному элементу. В таком альтернативном варианте без поворотного устройства и/или подающего устройства можно обойтись.
В настоящем варианте третье приводное устройство 7 является приводным устройством 39, ограничивающим усилие. Устройство содержит третий основной элемент 13 и третий подвижный элемент 19 и третий привод 25. Третий привод 25 для перемещения третьего подвижного элемента 19 относительно третьего основного элемента 13 является приводом, ограничивающим усилие. С этой целью, в принципе, подходит любой привод, ограничивающий усилие, который позволяет ограничение усилия в системах с повышенным или изменяющимся ускорением.
В представленном варианте направление перемещения третьего приводного устройства 7 или приводного устройства 29, ограничивающего усилие, простирается перпендикулярно направлению перемещения первого приводного устройства 5 и перпендикулярно направлению перемещения второго приводного устройства 6. Пространственное перемещение, по существу перемещение, задаваемое в прямоугольных координатах, функциональной головки 3 относительно основания 4, таким образом, запускается тремя управляемыми степенями свободы первого, второго и третьего приводными устройствами 5, 6, 7. Направление перемещения приводного устройства, ограничивающего усилие, предпочтительно простирается перпендикулярно направлению вектора радиального ускорения и, следовательно, в тангенциальной плоскости главной оси. Величина ускорения, вызываемого вращением функциональной головки 3 и манипулятора 1 вокруг главной оси 32 подвижного устройства 30, таким образом, не влияет или только слабо влияет на объединенные усилия в приводном устройстве 29, ограничивающем усилие.
Однако это находится в полном соответствии с замыслом изобретения свободно выбирать направление перемещения приводного устройства 29, ограничивающего усилие, относительно усилий ускорения или относительно главной оси 32.
Четвертое приводное устройство 8 предусмотрено на третьем приводном устройстве 7, в частности на третьем подвижном элементе 19. Упомянутое четвертое приводное устройство, в свою очередь, содержит четвертый основной элемент 14 и четвертый подвижный элемент 20, при этом четвертый подвижный элемент 20 можно привести в действие и вращать относительно четвертого основного элемента 14 четвертым приводом 26.
Четвертое приводное устройство 8, таким образом, запускает первую управляемую степень свободы. Пятое приводное устройство 9 предусмотрено на четвертом приводном устройстве 8, в частности на четвертом подвижном элементе 20. Упомянутое пятое приводное устройство содержит вращательную степень свободы пятого подвижного элемента 21 относительно пятого основного элемента 15, причем упомянутая вращательная степень свободы управляется пятым приводом 27. На пятом приводном устройстве 9 предусмотрено шестое приводное устройство 10, которое содержит шестой привод 28, который запускает вращение шестого подвижного элемента 22 относительно шестого основного элемента 16. Вращение шарнирно установленной функциональной головки 3 запускается расположением на одной линии четвертого, пятого и шестого приводных устройств 8, 9, 10. Более того, четвертый основной элемент 14 жестко присоединен к третьему подвижному элементу, пятый основной элемент 15 жестко присоединен к четвертому подвижному элементу 20, шестой основной элемент 16 жестко присоединен к пятому подвижному элементу 21, шестой подвижный элемент 22 жестко присоединен к функциональной головке 3.
Следовательно, в настоящем варианте шесть приводимых в действие, управляемых и/или регулируемых приводных устройств упорядочены последовательно. Три приводных устройства позволяют перемещение по линейным осям, а три приводных устройства позволяют вращение вокруг осей вращения. Две последовательные оси вращения или линейные оси предпочтительно расположены перпендикулярно друг другу в каждом случае. Приводное устройство, ограничивающее усилие, является предпочтительно управляемым по усилию, другие приводные устройства предпочтительно являются управляемыми по пути или управляемыми по положению. Контактное усилие приводного устройства, ограничивающего усилие, кроме того, может быть выбираемым и/или ограниченным.
На фиг. 3 показан дополнительный вариант части манипулятора согласно изобретению. В манипуляторе функциональная головка 3 расположена так, чтобы перемещаться по множеству степеней свободы посредством множества приводных устройств.
Функциональная головка жестко или с возможностью вращения соединена или сцеплена с подвижным элементом 44 параллельного кинематического устройства. Параллельное кинематическое устройство 41 содержит основной элемент 43, множество приводов 42 и подвижный элемент 44, который может перемещаться относительно параллельного кинематического устройства/основного элемента 43 приводами 42. Приводы 42 предпочтительно являются линейными осями, например, пневматическими или гидравлическими цилиндрами. Они присоединены к системе управления и управляются предпочтительно отдельно друг от друга или вместе. Наклон подвижного элемента 40 относительно основного элемента 43 можно получить различным изменением длины отдельных приводов. Параллельные перемещения подвижного элемента 44 относительно основного элемента 43 также возможны при соответствующем управлении приводами 42. Таким образом, пространственное перемещение функциональной головки 3 запускается при соответствующем управлении приводами 42. Режим работы параллельного кинематического устройства соответствует, например, режиму работы шестиногой конструкции или режиму работы треноги.
В настоящем варианте основной элемент 43 предусмотрен на приводном устройстве 29, ограничивающем усилие. Как показано на фиг. 2, приводное устройство 29 является линейно действующим приводным устройством, ограничивающим усилие. Устройство содержит третий основной элемент 13 и третий подвижный элемент 19, при этом третий подвижный элемент 19 жестко присоединен к основному элементу 43. Как показано на фиг. 2, третий основной элемент 13 присоединен к подающему устройству 40 и поворотному устройству 39. Режим работы поворотного устройства 39 и подающего устройства 40 по существу соответствует действию эквивалентных частей на фиг. 2. Оставшаяся конструкция варианта также по существу соответствует конструкции на фиг. 2. Следовательно, поворотное устройство предусмотрено жестким поворотным устройством на втором приводном устройстве, которое содержит второй основной элемент 12, второй подвижный элемент 18 и второй привод 24 для перемещения второго подвижного элемента относительно второго основного элемента. Второй основной элемент 12 присоединен к первому приводному устройству 5. В отношении конструкции первое приводное устройство 5 также соответствует первому приводному устройству на фиг. 2. Первое приводное устройство 5 предусмотрено на основании 4. Это основание 4 можно присоединить, как показано на фиг. 1, к подвижному устройству 30 с возможностью смещения или жестко.
Настоящий вариант на фиг. 3 отличается от варианта на фиг. 2 по существу конфигурацией приводных устройств для перемещения функциональной головки относительно приводного устройства 29, ограничивающего усилие. В то время как на фиг. 2 запускается вращение множества элементов вокруг осей по существу перпендикулярных друг другу, параллельное кинематическое устройство используется для наклона и пространственного перемещения функциональной головки 3 согласно варианту на фиг. 3.
На фиг. 4 показано дополнительное устройство согласно изобретению. Первое приводное устройство 5 и второе приводное устройство 6 снова предусмотрены на основании 4. Поворотное устройство 39 и подающее устройство 40 снова предусмотрены на втором приводном устройстве 6. Подающее устройство 40 жестко присоединено к основному элементу 43. Конструкция манипулятора соответствует конструкции варианта на фиг. 2 и фиг. 3 в отношении первого приводного устройства 5, второго приводного устройства 6, а также поворотного устройства 39 и подающего устройства 40. Согласно варианту на фиг.4 приводное устройство 29, ограничивающее усилие, является параллельным кинематическим устройством 41. Каждый отдельный привод 42 параллельного кинематического устройства 41 может быть устройством, ограничивающим усилие, или чувствительным устройством. В качестве альтернативы этому все параллельное кинематическое устройство может быть устройством, ограничивающим усилие как блок. Таким образом, вариант на фиг.4 по существу соответствует варианту на фиг. 3, при этом приводное устройство, ограничивающее усилие, с параллельным кинематическим устройством объединено в параллельное кинематическое устройство, ограничивающее усилие.
На фиг. 5 показан возможный дополнительный вариант манипулятора согласно изобретению в схематичном виде. Фиксирующее устройство 31 для аккомодации или фиксации тела 2 расположено подобно фиксирующему устройству на фиг. 1. Например, вертикальная ось тела проходит радиально, при этом головка указывает в направлении главной оси 32. Компонент ускорения, который генерируется вращением фиксирующего устройства 31 вокруг главной оси 32 также проходит, по существу следуя вертикальной оси тела. В настоящем варианте манипулятор 1 содержит основание 4, которое расположено с возможностью смещения или жестко на первом или втором несущем элементе 33, 34 подвижного устройства. Более того, манипулятор содержит первое приводное устройство 5 с первым основным элементом 11, который жестко присоединен к основанию 4. Первый подвижный элемент 17 может перемещаться или приводиться в действие относительно первого основного элемента 11 первым приводом 23. Перемещение происходит путем вращения вокруг оси, которая проходит по существу параллельно главной оси 32. Второй основной элемент 12 предусмотрен на первом подвижном элементе 17. Второй подвижный элемент 18 может перемещаться относительно этого второго основного элемента 12 посредством второго привода 24. Вместе компоненты формируют второе приводное устройство б. Этот привод также является вращающимся приводом, при этом ось вращения проходит преимущественно перпендикулярно оси первого приводного устройства 5. Второй подвижный элемент 18 выполнен в форме звена, и в зоне, удаленной от второго привода, присоединен к третьему приводному устройству 7. Третье приводное устройство 7, в свою очередь, содержит третий основной элемент 13, который жестко присоединен ко второму подвижному элементу 18. Более того, третье приводное устройство содержит третий привод 25, который может вращаться в третьем выполненном в форме звена подвижном элементе 19 вокруг оси вращения, которая проходит по существу перпендикулярно оси вращения второго приводного устройства 6. Третий основной элемент 19 и второй подвижный элемент могут представлять собой одно целое в предпочтительном варианте.
Четвертое приводное устройство 8 предусмотрено на третьем приводном устройстве 7, в частности, на третьем подвижном элементе 19. Пятое приводное устройство 9, которое является приводным устройством 29, ограничивающим усилие, предусмотрено на четвертом приводном устройстве 8.
На фиг. 6 также показано то же самое устройство, что и на фиг. 5 с основанием 4, на котором предусмотрено первое приводное устройство 5 с возможностью вращения. Второе приводное устройство 6 предусмотрено на первом приводном устройстве 5, третье приводное устройство 7 предусмотрено на втором приводном устройстве 6, четвертое приводное устройство 8 предусмотрено на третьем приводном устройстве 7, и пятое приводное устройство 9 предусмотрено на четвертом приводном устройстве 8, при этом упомянутое пятое приводное устройство является приводным устройством 29, ограничивающим усилие. Функциональная головка 3 предусмотрена на приводном устройстве 29, ограничивающем усилие, на фиг. 5 и фиг. 6. Функциональную головку можно направить к телу 2 перемещением манипулятора 1, в частности, перемещением подвижных элементов 17, 18, 19, 20 приводами 23, 24, 25, 26, 27 и 29.
На фиг. 7 и фиг. 8 показаны различные виды дополнительного варианта устройства согласно изобретению манипулятора и подвижного устройства. Снова, положение фиксирующего устройства 31 для тела 2 соответствует положению на фиг. 1. Манипулятор для перемещения функциональной головки 3 к телу 2 человека содержит привод 45 в форме дуги. Дугообразный привод 45 содержит основной элемент 46, который продолжается в форме дуги вокруг или над телом 2 человека. На основном элементе расположен свободно смещаемый подвижный элемент 47 привода в форме дуги, при этом функциональная головка 3 по существу нацелена внутрь в направлении тела 2.
Первое приводное устройство 5 предусмотрено на подвижном элементе 47 привода 45 в форме дуги. Упомянутое первое приводное устройство содержит первый основной элемент 11 и первый подвижный элемент 17. Первый подвижный элемент 17 может перемещаться линейно относительно первого основного элемента. Направление линейного перемещения по существу следует радиальному направлению мгновенного положения по основному элементу 46 привода в форме дуги.
Приводное устройство 29 предусмотрено в продолжение первого подвижного элемента 17. Предусмотренной на упомянутом приводном устройстве является функциональная головка 3, которая нацелена в направлении тела 2 и может быть доставлена и прижата к телу манипулятором.
На фиг. 9 показано дополнительное применение манипулятора согласно изобретению и подвижного устройства согласно изобретению.
Фиксирующее устройство 31 для тела 2 человека предусмотрено в или на кабине тренажера. Согласно предыдущему уровню техники кабина тренажера предусмотрена, например, на однозвенной или многозвенной центрифуге. С этой целью кабина тренажера установлена свободно вращающейся и управляемой одним или более качающимися кольцами 48. Наиболее удаленное качающееся кольцо предпочтительно присоединено к звену центрифуги. Согласно предыдущему уровню техники это звено вращается вокруг главной оси 32. Кабина тренажера расположена на стандартном расстоянии от оси 32 вращения. Манипулятор 1, в свою очередь, предусмотрен в кабине тренажера, предпочтительно в зоне фиксирующего устройства 31. В настоящем варианте упомянутый манипулятор представлен схематично. Манипулятор снова содержит функциональную головку 3, которую можно направить к телу 2 человека множеством управляемых приводных устройств. По меньшей мере, одно приводное устройство является приводным устройством 29, ограничивающим усилие.
Функциональная головка 3 линейно перемещается посредством первого приводного устройства 5. Функциональную головку 3 можно линейно перемещать в дополнительном направлении посредством второго приводного устройства 6. Манипулятор согласно настоящему изобретению на фиг. 9 или согласно варианту на фиг. 1 - фиг. 8 предпочтительно предусмотрен на основании.
Согласно дополнительному варианту множество приводных устройств являются приводными устройствами, ограничивающими усилие. Этот вариант соответствует варианту на фиг.2, при этом в дополнение к третьему приводному устройству второе приводное устройство также является приводным устройством, ограничивающим усилие.
В дополнение к третьему приводному устройству фиг. 2, второе и первое приводные устройства являются приводными устройствами, ограничивающими усилие, согласно дополнительному варианту.
Согласно дополнительному варианту приводные устройства, оси перемещения которых лежат по существу в тангенциальной плоскости главной оси, являются приводными устройствами, ограничивающими усилие. Например, оси перемещения первого и третьего приводного устройства лежат по существу в тангенциальной плоскости главной оси на фиг. 2.
В следующем ниже описании будет дополнительно изложено примерное использование манипулятора согласно изобретению подвижные устройства согласно изобретению для ультразвукового исследования с повышенным ускорением. Для исследования или лечения тела 2, тело 2 прикрепляется к фиксирующему устройству 31 или помещается на фиксирующее устройство 31. Фиксирующее устройство соединено с первым несущим элементом 33 или со вторым несущим элементом 34. Если подвижное устройство неподвижно, человек лежит или сидит на фиксирующем устройстве 31 и, при необходимости, может прикрепить себя ремнями к фиксирующему устройству. В случае однозвенных центрифуг пилотажные тренажеры или кабина тренажера, как показано на фиг. 9, человек сидит в имитационной кабине самолета. В подвижном устройстве согласно фиг. 1 человек лежит на фиксирующем устройстве, которое, может быть, содержит эргонометрические элементы или другие устройства для нагрузки человека.
Затем манипулятор вводится в зону тела 2 человека. Это происходит, например, смещением основания 4 по основному несущему элементу 35 или путем дистанционного управления или автоматической работой приводных устройств, например, первого приводного устройства 5. Функциональная головка направляется и нажимает на нужную точку тела.
В отношении ультразвукового исследования, функциональная головка является ультразвуковой головкой. Ультразвуковая головка размещается напротив тела в состоянии покоя подвижного элемента таким образом, чтобы нужное изображение появилось на оценочном блоке, например, в диспетчерской или на мобильном устройстве. Перемещение подвижного устройства начинается в этом основном положении, в котором функциональная головка направляется манипулятором к нужной точке тела 2. В случае варианта на фиг. 1 первый и второй несущие элементы 33, 34 вращаются вокруг главной оси 32. В других вариантах, например, в варианте на фиг. 9 представленная кабина тренажера также вращаются вокруг главной оси 32 посредством главного звена (не представлен). В результате повышенного и/или изменяющегося ускорения, рассматриваемые органы тела 2 или само тело, возможно, также изменяют положение. Чтобы получить нужное изображение, функциональную головку можно перемещать манипулятором. Это происходит дистанционно управляемым или автоматизированным перемещением приводных устройств. Система 36 управления и устройство 37 ввода данных предусмотрены для управления перемещением функциональной головки и манипулятора. Например, другой человек может управлять перемещением функциональной головки относительно тела 2 из диспетчерской такими элементами как джойстики, ползунки, информационные перчатки и т.д. Более того, функциональную головку согласно манипуляторам на фиг. 2 - фиг. 8 можно привести в действие и перемещать по множеству степеней свободы. Следовательно, с одной стороны угол функциональной головки относительно тела можно изменять через вращательные степени свободы. С другой стороны, положение функциональной головки относительно тела можно изменять через поступательные степени свободы. Чтобы исследовать другую точку тела, функциональную головку можно приподнять над телом и направить и нажать на другую точку устройством ввода данных и управлением приводных устройств.
Непредумышленное повреждение тела предотвращается приводным устройством, ограничивающим усилие. Приводное устройство, степень свободы или направление воздействия которого производит давление, которое оказывает влияние на тело 2, предпочтительно является приводным устройством, ограничивающим усилие. Например, это линейная степень свободы, направление действия которой простирается перпендикулярно поверхности тела.
Если функциональная головка направляется к телу 2 дистанционным управлением, это происходит с предварительно отрегулированным или выбранным усилием или с предварительно отрегулированным или выбранным максимальным усилием. Даже в случае выхода из строя приводных устройств, которые не являются ограничивающими усилие, непредумышленное повреждение тела функциональной головкой предотвращается, поскольку главный компонент усилия кинематического устройства является ограничивающим усилие.
Для выполнения других исследований и лечения, функциональная головка может содержать компоненты, исследовательские и/или лечебные устройства, например, такие как ультразвуковая измерительная головка, оптические записывающие устройства, акустические записывающие устройства, устройства для измерения сопротивления, устройство для инъекций, устройство для жидкостного анализа, прибор для забора крови, аналитический прибор, прибор для химического анализа, источник излучения, например, рентгеновских лучей, гамма- или инфракрасного излучения, источник лазерного излучения, приборы для взятия выборки, приборы для измерения температуры, приборы для измерения тока, детекторы излучения, дополнительные радиологические, инвазивные или контактные приборы для диагностических или лечебных целей. Перемещение функциональной головки и выполнение исследования или лечения происходит описанным образом.
Подвижные устройства, представленные на фиг. 1 и фиг. 9, являются примерными подвижными устройствами. Манипулятор согласно изобретению предусматривается на подвижных устройствах. Манипулятор согласно изобретению содержит множество приводных устройств, при этом, по меньшей мере, одно из этих приводных устройств является приводным устройством, ограничивающим усилие.
Манипулятор содержит функциональную головку, которая подготовлена для проведения контактного и/или инвазивного исследования или лечения животного или человека. С этой целью функциональную головку можно предпочтительно перемещать по множеству поступательных степеням свободы и вращать вокруг множества вращательных степеней свободы. Различные варианты степеней свободы на фиг. 2, 3 и 4, в частности, вариант приводного устройства, ограничивающего усилие, с приводным устройством карданного вала, параллельное кинематическое устройство или параллельное кинематическое устройство, ограничивающее усилие, можно также разместить на манипуляторе, представленном на фиг. 5 - фиг. 8. Таким образом, например, параллельное кинематическое устройство на фиг. 4, ограничивающее усилие, можно разместить на руке робота на фиг. 6. Например, параллельное кинематическое устройство с независимым приводным устройством, ограничивающим усилие, расположенным на нем, можно также предусмотреть на подвижном элементе дугообразного привода 47 на фиг. 7 и 8. Комбинации фиг. 2, 3, 4 с различными вариантами манипуляторов на фиг. 2 и фиг. 5-8 также соответствуют идее изобретения. Манипуляторы согласно фиг. 2-8 и/или общей части описания можно приспособить на подвижных устройствах, например, на фиг. 1-9 общей части описания.
Список позиций
1 - манипулятор
2 - тело
3 - функциональная головка
4 - основание
5 - первое приводное устройство (Y)
6 - второе приводное устройство(X)
7 - третье приводное устройство(Z)
8 - четвертое приводное устройство
9 - пятое приводное устройство
10 - шестое приводное устройство
11 - первый основной элемент
12 - второй основной элемент
13 - третий основной элемент
14 - четвертый основной элемент
15 - пятый основной элемент
16 - шестой основной элемент
17 - первый подвижный элемент
18 - второй подвижный элемент
19 - третий подвижный элемент
20 - четвертый подвижный элемент
21 - пятый подвижный элемент
22 - шестой подвижный элемент
23 - первый привод
24 - второй привод
25 - третий привод
26 - четвертый привод
27 - пятый привод
28 - шестой привод
29 - приводное устройство, ограничивающее усилие
30 - подвижное устройство
31 - фиксирующее устройство
32 - главная ось
33 - первый несущий элемент
34 - второй несущий элемент
35 - основной несущий элемент
36 - система управления
37 - устройство ввода данных
38 - направляющий элемент
39 - поворотное устройство
40 - подающее устройство
41 - параллельное кинематическое устройство
42 - привод - параллельное кинематическое устройство
43 - основной элемент параллельного кинематического устройства
44 - подвижный элемент параллельного кинематического устройства
45 - дуговой привод
46 - основной элемент дугового привода
47 - подвижный элемент дугового привода
48 - (качающееся) кольцо
Тренажер для имитации перемещения и ориентации
Устройство и способ моделирования ускорений
Устройство для пространственного перемещения субъектов
Устройство для пространственного перемещения по меньшей мере одного человека
Тренажер для имитации перемещения и ориентации
Устройство и способ моделирования ускорений
Устройство для пространственного перемещения субъектов
Устройство для пространственного перемещения по меньшей мере одного человека

