Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ И УСТРОЙСТВО ОБЪЕДИНЕНИЯ/КОНСОЛИДАЦИИ С МНОЖЕСТВОМ МОДУЛЕЙ ОБРАБОТКИ
Вид РИД
Изобретение
Настоящее изобретение относится к контролю достоверности в навигационных системах.
В частности, оно касается способа и устройства контроля достоверности в модулях обработки, использующих инерциальные измерения, получаемые от инерциального измерительного блока (в дальнейшем тексте называемого также блоком UMI), а также измерения, получаемые с сигналами, поступающими от группировок радионавигационных спутников. В дальнейшем тексте эти измерения будут называться измерениями, получаемыми от навигационного устройства.
Изобретение применяется также для данных измерений, получаемых только из сигналов группировок радионавигационных спутников.
Область техники
Для обеспечения навигации летательных аппаратов, а также морских судов обычно используют гибридные приборы INS/GNSS (от англо-саксонского "Inertial Navigation System" и "Global Navigation Satellite System").
Инерциальная аппаратура, использующая данные от блока UMI для вычисления данных местоположения, скорости и ориентации, выдает мало зашумленные данные, которые являются точными в краткосрочном плане. Однако в долгосрочном плане эффективность этой инерциальной аппаратуры при определении местоположения снижается (более или менее быстро, например, в зависимости от качества датчиков, акселерометров или гироскопов и от осуществляемых обработок). Данные, поступающие от радионавигационной спутниковой системы, очень мало отклоняются в долгосрочном плане, но они часто оказываются зашумленными и имеют переменную точность. Кроме того, инерциальные измерения всегда доступны, тогда как данные GNSS доступны не всегда и могут быть искаженными и зашумленными.
Гибридная система INS/GNSS комбинирует данные, поступающие от блока UMI, и данные, выдаваемые одним или несколькими приемниками спутниковой радионавигации, которые могут работать на разных группировках, чтобы получать данные о положении и о скорости из двух источников. Точность измерений, выдаваемых приемником или приемниками GNSS, позволяет контролировать инерциальный дрейф, и мало зашумленные инерциальные измерения позволяют фильтровать шум на измерениях приемника.
Современные авиационные навигационные системы вычисляют радиус безопасности вокруг выдаваемого положения, который ограничивает погрешность истинного положения заданным риском достоверности. Именно эта пара факторов в виде радиуса безопасности и соответствующего уровня достоверности определяет достоверность выдаваемого положения.
Этот подход применим также и для других переменных, таких как положение на земле (широта, долгота), и, в частности, для одномерных данных, таких как высота, для которых классически вычисляют также дистанцию безопасности.
Сущность изобретения
Изобретение обеспечивает способ контроля достоверности данных, который определяет радиусы безопасности, учитывающие исключительно редкие события или отказы, например, с вероятностью наступления менее 10-7 за час работы. В этом случае возникает необходимость в учете событий, которые имеют такие вероятности наступления за час работы, которыми обычно пренебрегают.
В качестве примера очень редких событий, потенциально сказывающихся на информации о положении или скорости, можно указать неуказанную двойную неисправность радионавигационных спутников, неуказанную двойную неисправность UMI или неуказанную общую неисправность радионавигационной системы, вероятность появления которой составляет около 10-8 на час работы в случае радионавигационной системы GPS Navstar).
В связи с этим предложен способ контроля достоверности значения навигационных данных, выдаваемых устройством объединения/консолидации, содержащим множество модулей обработки, каждый из которых вырабатывает навигационное решение на основании измерений, поступающих от одного или нескольких независимых навигационных устройств, согласно которому для каждого модуля обработки определяют радиус безопасности, соответствующий заданной вероятности отказа,
отличающийся тем, что определяют по меньшей мере одну консолидированную зону, которая объединяет зоны безопасности, центры которых находятся на значениях решений на выходе модулей обработки и которые соответствуют радиусам безопасности, определенным для этих модулей, при этом радиус безопасности указанного устройства объединения/консолидации для указанной вероятности отказа определяют таким образом, чтобы он соответствовал указанной консолидированной зоне.
В случае данных измерений, поступающих исключительно от радионавигационной системы, модуль обработки осуществляет, например, автономную обработку достоверности положения, производимую приемником (известную под сокращением Р-RAIM), или ее эквивалент для скорости (V-RAIM) с целью вычисления соответствующих значений радиусов безопасности. В случае данных, получаемых от UMI и от GNSS, модуль обработки производит, например, гибридизацию и обработку проверки достоверности типа AAIM.
Предпочтительно такой способ можно дополнить следующими признаками, рассматриваемыми отдельно или в любых возможных комбинациях:
- если измерения по меньшей мере одного навигационного устройства используют на входе двух модулей обработки, то другие навигационные устройства, измерения которых используются на входе соответственно одного и другого из этих двух модулей обработки, выбирают таким образом, чтобы они были независимыми с точки зрения их возможного отказа;
- если по меньшей мере два навигационных устройства являются зависимыми с точки зрения их возможного отказа, то по меньшей мере два модуля обработки, использующих измерения соответственно одного и другого из этих навигационных устройств, являются такими, чтобы другие навигационные устройства, которые они используют на входе, были независимыми с точки зрения их возможного отказа;
- после определения центра консолидированной окружности определяют радиус указанной консолидированной окружности как радиус окружности, охватывающей окружности, центр которых находится на значениях решения на выходе модулей обработки и радиусы которых равны их радиусам безопасности;
- охватывающей окружностью является окружность с минимальным радиусом, охватывающая окружности с центрами на значениях решения на выходе модулей обработки;
- центр консолидированной окружности определяют как центр, равный средней и, в случае необходимости, взвешенной величине значений решения на выходе различных модулей обработки;
- на выходе модулей обработки применяют обнаружение и исключение возможных отказов;
- на выходах модулей обработки применяют тесты на когерентность, в зависимости от которых обнаруживают возможные отказы;
- выходы тестов когерентности анализируют для обнаружения на данных, соответствующих этим выходам, характеристических сигнатур определенных отказов;
- навигационные устройства, общие для модуля обработки, являются блоками UMI, а также радионавигационными приемниками, при этом обработка, применяемая на выходах модулей обработки или на измерениях на их входах, позволяет обнаружить отказ одного или нескольких спутников, и/или инерциального измерительного блока, и/или системы GNSS, и/или приемника GNSS, и/или блока UMI одного типа;
- на уровне модулей обработки применяют обнаружение неисправности оборудования UMI.
Изобретение обеспечивает устройство объединения/консолидации, содержащее множество модулей обработки, каждый из которых вырабатывает гибридное навигационное решение на основании измерений, поступающих от одного или нескольких независимых навигационных устройств, при этом указанное устройство объединения-консолидации содержит средства обработки, которые определяют для каждого модуля обработки радиус безопасности, соответствующий заданной вероятности отказа, отличающееся тем, что содержит модуль консолидации, который определяет по меньшей мере одну консолидированную зону, охватывающую зоны безопасности, центры которых находятся на значениях решения на выходе модулей обработки и которые соответствуют радиусам безопасности, определенным для этих модулей, при этом радиус безопасности указанного устройства объединения/консолидации для указанной вероятности отказа определяют таким образом, чтобы он соответствовал указанной консолидированной зоне.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
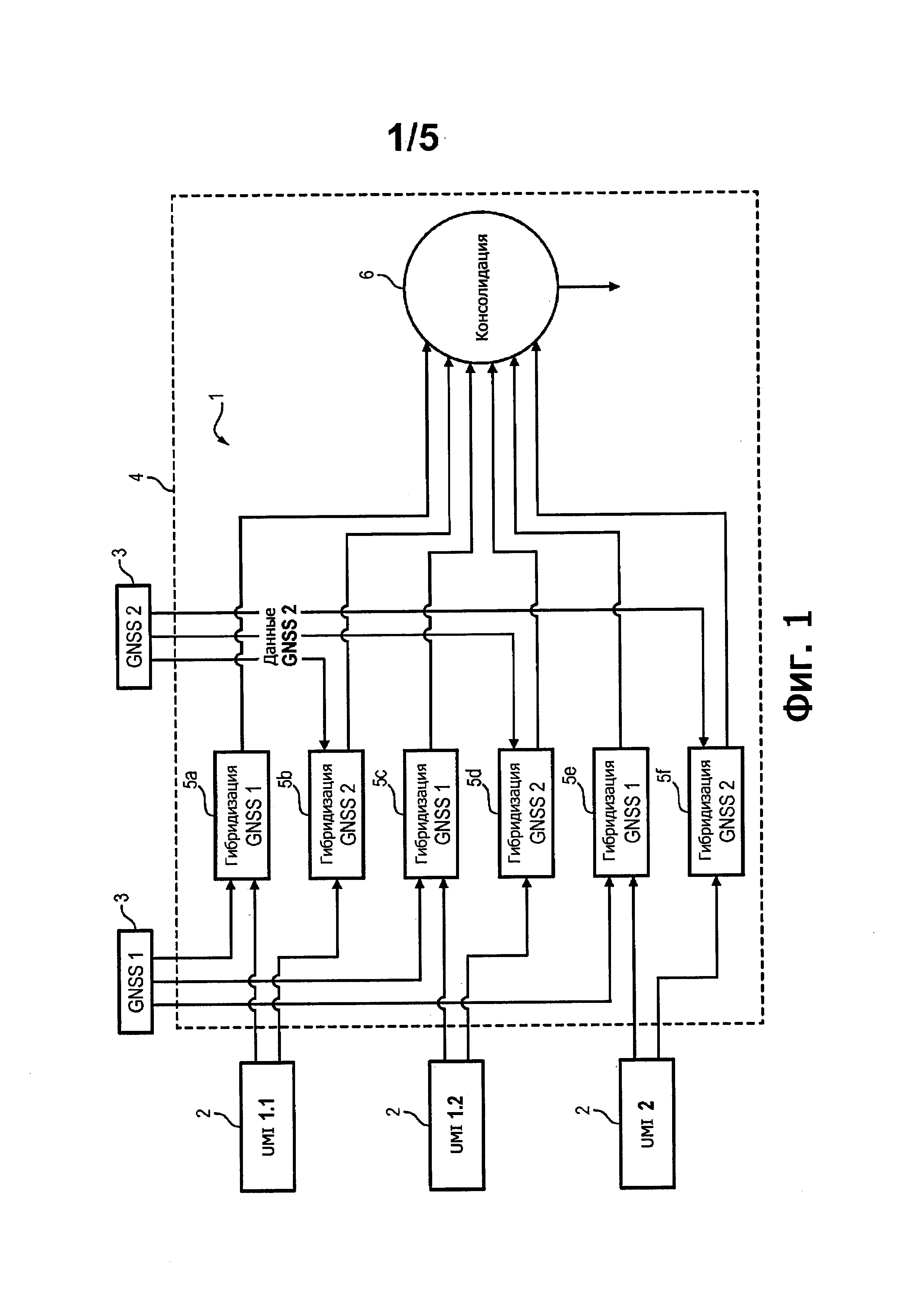
фиг. 1 - архитектура устройства объединения/консолидации, связанного с модулями обработки типа гибридной системы инерциальной навигации/ GNSS, согласно варианту выполнения изобретения;
фиг. 2 - схема возможного варианта осуществления изобретения;
фиг. 3а-3е - различные примеры характеристических сигнатур видов отказов, которые можно обнаруживать в варианте осуществления изобретения;
фиг. 4, 5 и 6 - возможные примеры архитектуры консолидации для навигационного устройства согласно варианту выполнения изобретения.
Варианты осуществления изобретения
Пример архитектуры и консолидации
На фиг. 1 схематично показана навигационная система 1, которая установлена (или предназначена для установки), например, на летательном аппарате или на морском судне.
Эта навигационная система 1 использует различные навигационные устройства UMI и GNSS и содержит для этого различные инерциальные измерительные блоки 2, а также приемники 3 сигналов GNSS от разных типов спутниковых группировок. Кроме того, она содержит устройство 4 объединения/консолидации (вычислительная платформа), которое включает в себя с одной стороны шесть модулей обработки 5a-5f типа фильтров Кальмана и с другой стороны модуль 6 консолидации.
В частности, в представленном примере предусмотрены три инерциальных измерительных блока UMI 1.1, UMI 1.2 и UMI 2, при этом два первых блока являются блоками одного типа (тип 1), а третий является блоком другого типа (тип 2). Приемники 3 обеспечивают псевдоизмерения по меньшей мере на двух спутниковых группировках, одна GNSS 1 из которых является, например, группировкой системы GPS, а другая GNSS 2 является, например, группировкой систем GALILEO или GLONASS.
Каждый модуль обработки 5a-5f получает:
- данные с выхода блока 2, которые являются измерениями инерциальных инкрементов, выполненными датчиками (гироскопами, акселерометрами) блока,
- и данные псевдоизмерений с выхода приемника 3.
В частности, модуль 5а одновременно получает данные GNSS 1 и данные блока UMI 1.1, модуль 5b получает данные GNSS 2 и данные блока UMI 1.1, модуль 5с получает данные GNSS 1 и данные блока UMI 1.2, модуль 5d получает данные GNSS 2 и данные блока UMI 1.2, модуль 5е получает данные GNSS 1 и данные блока UMI 2 и, наконец, модуль 5f получает данные GNSS 2 и данные блока UMI2 (см. таблицу ниже).
Алгоритмы, применяемые на уровне модулей 5a-5f, могут быть алгоритмами любого типа, например типа алгоритмов поиска цели AAIM. В рамках применения этих алгоритмов вычисляют радиусы безопасности для заданных вероятностей отказа при помощи модулей обработки 5a-5f.
Для ознакомления с подробными примерами вычисления радиусов безопасности, выполняемого на уровне модуля обработки можно обратиться к патентной заявке ЕР2374022 (А1), поданной на имя заявителя под названием «Конструктивно надежное устройство гибридизации в замкнутом контуре».
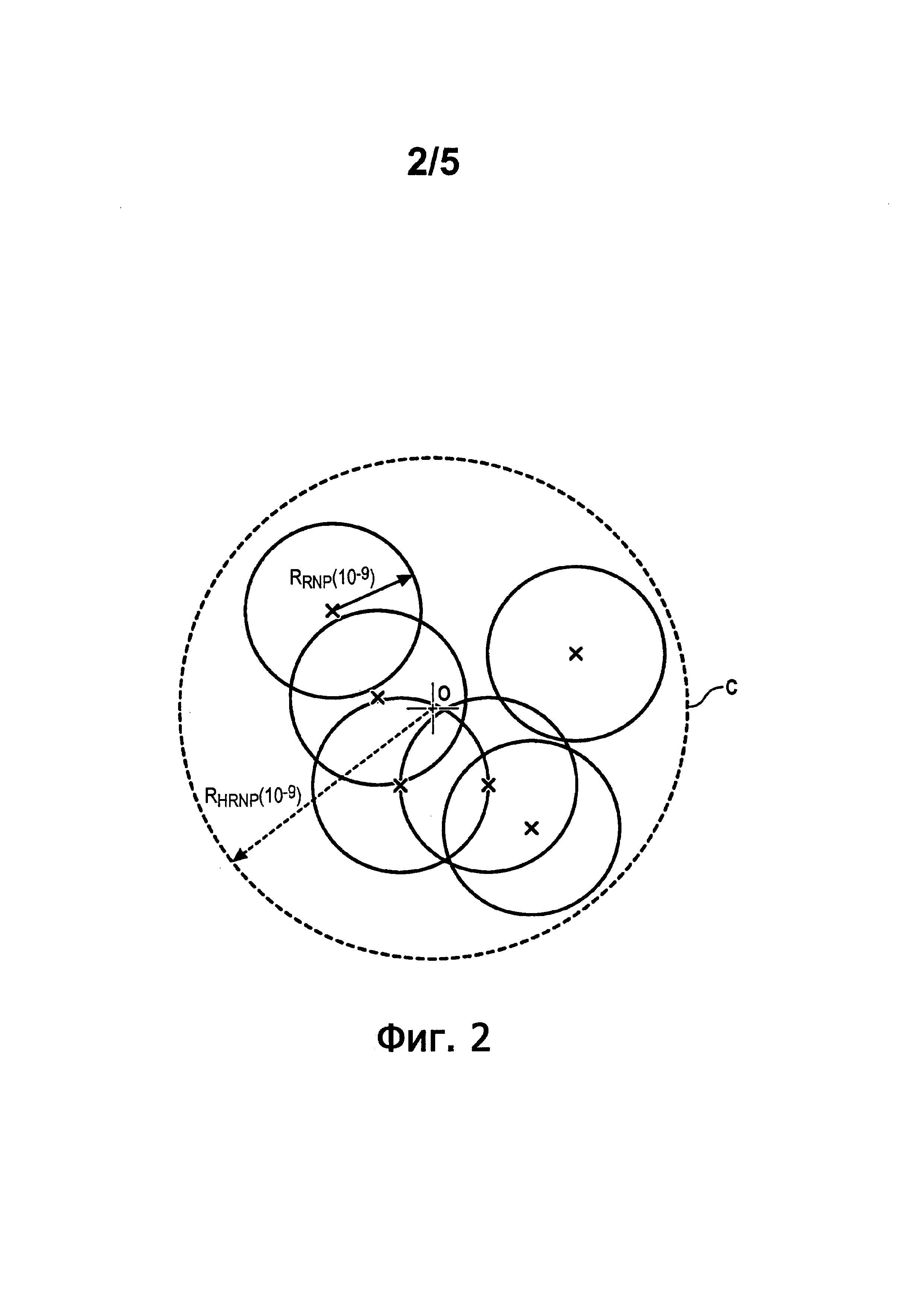
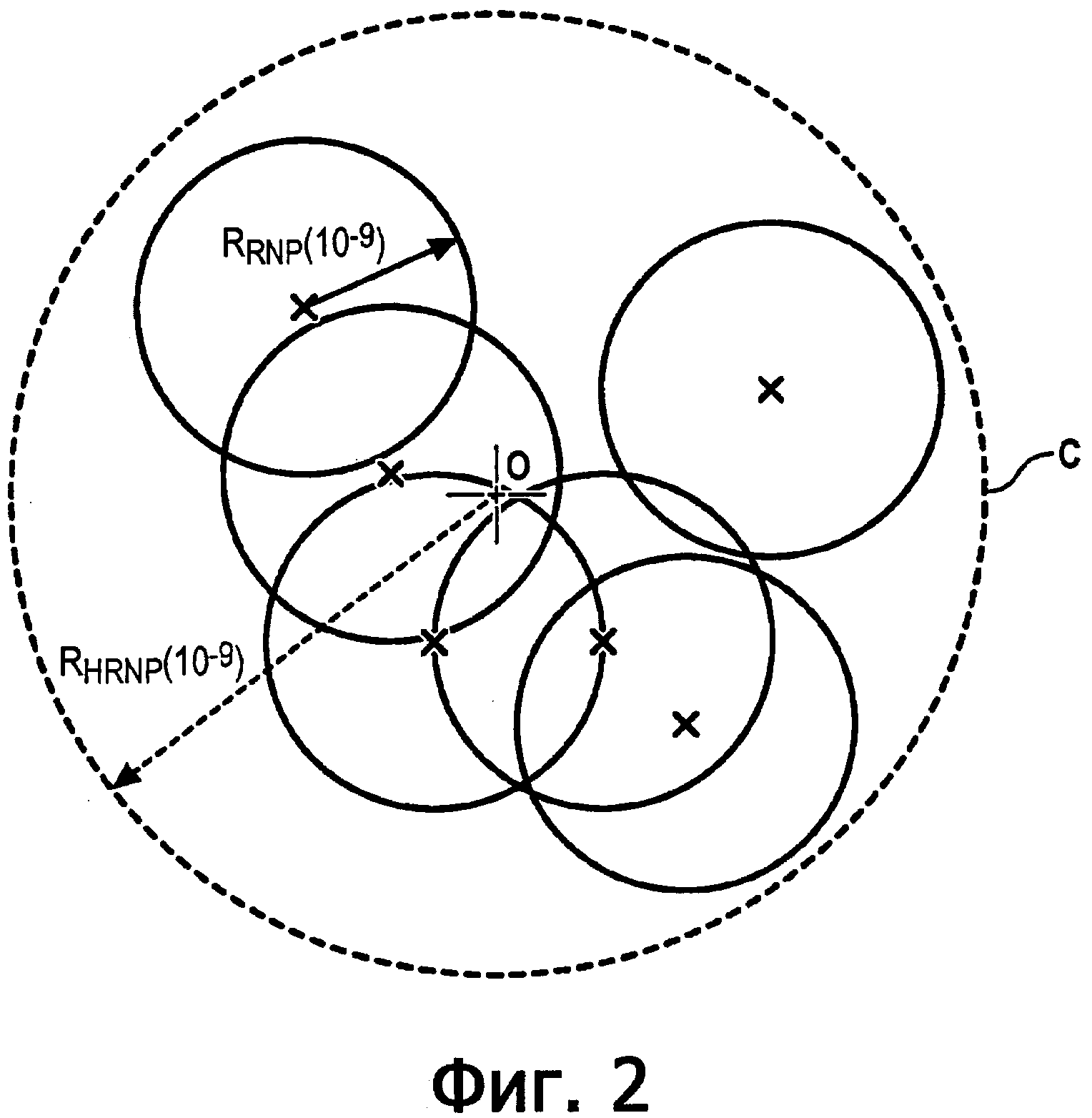
Консолидация, применяемая модулем 6 консолидации, позволяет определить для каждого модуля обработки 5a-5f окружность, радиус которой равен радиусу безопасности указанного модуля для искомой вероятности отказа и центром которой является значение решения, выдаваемое на выходе указанным модулем обработки (окружности, показанные на фиг. 2 сплошными линиями).
В представленном примере применяют шесть модулей обработки и, таким образом, получают шесть окружностей.
Кроме того, на основании этих шести окружностей модуль 6 определяет охватывающую окружность (показана пунктирной линией). При этом можно применять различные методики определения.
Определяют центр О консолидированной окружности в зависимости от значений на выходе различных модулей обработки 5а-5f. Например, центром этой окружности можно выбрать среднюю, в случае необходимости взвешенную величину значений решений на выходе модулей обработки 5a-5f.
После выбора центра О в качестве выбранной окружности С можно взять охватывающую окружность с минимальным радиусом или любую другую охватывающую окружность.
При этом радиус R этой окружности используют как радиус безопасности для вероятности безопасности. Следует отметить, что переменная, для которой определяют таким образом радиус безопасности, может представлять собой двухмерные данные положения на земле или скорости или может представлять собой одномерные данные, например, высоты или азимутальной скорости.
Радиус безопасности соответствует максимальной погрешности при данной вероятности появления погрешности.
Иллюстрация осуществления изобретения
Определения
В дальнейшем тексте определяют ограничительное условие (или гипотезу) "RNP" (от Rare Normal Performance) как возможное присутствие неисправностей или простых или комбинированных событий на уровне блока UMI, приемника GNSS или спутниковой группировки, или комбинации неисправностей на уровне этих различных элементов, которые могут появиться с вероятностью более 10-7 на час работы.
Определяют ограничительное условие (или гипотезу) "HRNP" (от Hyper Rare Normal Performance) как возможное присутствие неисправностей или событий на уровне блока UMI, приемника GNSS или спутниковой группировки, или комбинации неисправностей на уровне этих различных элементов, которые могут появляться с вероятностью менее 10-7 и более 10-9 на час работы. Среди неисправностей, учитываемых при HRNP, но не при RNP, можно указать следующие:
- две неуказанные неисправности спутника на группировке «HRNP GNSS 1» или «HRNP GNSS 2»,
- неуказанная общая неисправность спутниковой группировки или неуказанная неисправность приемника «HRNP GNSS 1» или «HRNP GNSS2»,
- общий вид для UMI типа 1 (одновременная неисправность на UMI 1.1 и UMI 1.2) «HRNPUMIT1»,
- одновременная неуказанная неисправность двух блоков UMI разного типа «HRNP UMI T1 Т2»,
- «анормальная» погрешность относительно указанного бюджета погрешности (псевдорасстояния, псевдоскорости, дельта-области), предполагаемого для нормального (то есть гауссова) распределения.
Гипотезы
В соответствии с нормой DO-229D для отказов, действующих на псевдорасстояниях GPS NAVSTAR, считается, что события, такие как тройная неисправность спутника или одновременная неисправность спутниковой группировки и блока UMI, имеют вероятность появления на час полета, которой можно пренебречь относительно значения 10-9/час работы.
Данные, поступающие от спутниковых группировок, считаются независимыми (независимые антенны, независимые приемники, независимые системы GNSS…).
Каждая из обработок (модули 5a-5f) позволяет получить горизонтальное положение и скорость с радиусом безопасности на 10-9 /час работы (без учета событий на уровне блоков UMI и спутниковых группировок, вероятность наступления которых может находиться в пределах от 10-7 до 10-9 /час работы).
Соответствующим примером модуля обработки является гибридное устройство, описанное в патентной заявке FR2939900.
Для каждого модуля обработки определяют радиус безопасности на 10-7/час работы с ограничительной гипотезой RNP (радиус обозначают «RRNP(10-7)».
Затем для каждого модуля обработки вычисляют радиус безопасности на 10-9/час работы с ограничительной гипотезой RNP (радиус обозначают «RRNP(10-9)».
С этой целью этот радиус безопасности экстраполируют, принимая в качестве распределения двухмерное гауссово распределение между вероятностями 10-7 и 10-9.
Таким образом, на выходе каждого модуля обработки 5a-5f получают значение радиуса безопасности RRNP(10-9) (как для горизонтальной скорости, так и для горизонтального положения) при 10-9/час работы с ограничительной гипотезой RNP.
Консолидация
Консолидация выходов модулей обработки 5a-5f, применяемая на уровне модуля 6, определяет консолидированный радиус безопасности для устройства 4 объединения/консолидации. Это определение осуществляют, как было описано выше со ссылками на фиг.1 и 2, вычисляя окружность, которая охватывает все считающиеся достоверными решения, то есть включенные во все диски с радиусом RRNP(10-9) на выходе модулей обработки для выбранного консолидированного двухмерного значения (скорость или положение).
Таким образом, модуль 6 выдает горизонтальное положение (и скорость) и радиус безопасности «RRNP(10-9)» на 10-9/час работы без ограничительной гипотезы RNP, но пренебрегая при этом простыми или комбинированными отказами с вероятностью появления ниже 10-9/час работы.
Анализ поведения в случае «очень редких» отказов
Чтобы проиллюстрировать возможные операции консолидации, анализируют случаи с вероятностью появления между 10-7/на час работы и 10-9/на час работы, то есть HRNP и  , заполняя ячейки указанной выше таблицы следующим образом:
, заполняя ячейки указанной выше таблицы следующим образом:
- с «ОК», если входы модуля обработки соблюдают гипотезу RNP
- с «КО», если входы модуля обработки не соблюдают гипотезу RNP, но соблюдают гипотезу HRNP.
Эта таблица изменяется в зависимости от гипотезы условий работы.
При гипотезе RNP таблица имеет следующий вид:

При гипотезе HRNP и в случае локально не обнаруженного отказа системы GNSS1, например, такого как неисправность двух спутников, общая неисправность группировки или неисправность на уровне приемника, таблица имеет следующий вид:

При гипотезе HRNP и в случае (локально) не обнаруженного отказа системы GNSS2, например, такого как неисправность двух спутников, общая неисправность группировки или неисправность на уровне приемника, таблица имеет следующий вид:

При гипотезе HRNP и в случае UMI Т1 получаем следующую таблицу:

При гипотезе HRNP и в случае UMI Т1 или (и) Т2 получаем следующие две таблицы:

или

Таким образом, для всех имеющихся 6 модулей с радиусами безопасности на 10-9 /час работы, вычисленными при гипотезе RNP, по меньшей мере два модуля (не обязательно идентифицированных) являются «надежными», так как они соблюдают гипотезы, связанные с полученными радиусами безопасности.
Таким образом, истинное горизонтальное положение, как и истинная горизонтальная скорость, имеет вероятность на час полета менее 10-9/час работы за пределами каждой из двух окружностей безопасности, выдаваемых этими двумя (по меньшей мере) модулями обработки, при этом центром каждой окружности является выдаваемое решение.
Следовательно, вероятность на час полета того, что истинное положение (или скорость) (в точке прибора, общей для вычислений модулей) находится за пределами любой окружности, охватывающей эти шесть окружностей, меньше 10-9 в том числе в очень редком случае отказа HRNP и .
Обнаружение отказов, возможные исключения и обслуживание
Осуществляемую консолидацию можно дополнить обработкой, позволяющей обнаруживать некоторые виды отказов и автоматически управлять ими посредством временного или окончательного исключения за период полета оптимальной навигации, во время которого обнаруживается неисправность.
Для этого, например, на уровне модуля 6 применяют алгоритм FDE (Fault Detection and Exclusion) между выходами шести модулей обработки. Этот алгоритм позволяет обнаружить и, в случае необходимости, изолировать неуказанную неисправность HRNP, но . Кроме того, его дополняют обработками на уровне каждого модуля обработки 5а-5f для обнаружения возможных неисправностей на уровне аппаратных узлов (блок UMI, вычислительное устройство, приемник GNSS).
Вышеупомянутые таблицы показывают, что редкие неисправности HRNP, но имеют особые сигнатуры: например, неисправность GNSS1 скажется на всех модулях обработки, использующих GNSS1, но не скажется на других.
Обработка FDE 6 модулей использует эти сигнатуры для обнаружения и изолирования воздействия отказов.
Для этого, например, все результаты подвергают следующим тестам между подтвержденными решениями.
- Выходы ГИБР X и ГИБР Y двух модулей обработки 5a-5f являются «RNP-когерентными» (соответственно «RNP-некогерентными»), если по меньшей мере одна точка является общей для всех решений при 10-9 RNP, выдаваемых каждым модулем. Это ответствует проверке того, превышает или нет норма 2 между двумя выходами сумму двух радиусов безопасности плюс эффект асинхронности между этими выходами.
- Выходы ГИБР X и ГИБР Y двух модулей обработки 5a-5f являются «RNP-исключенными» (соответственно «RNP-не исключенными»), если норма 2 между двумя решениями превышает в k раз, при k≥1, сумму двух радиусов безопасности плюс, например, эффект асинхронности между этими выходами.
Следует отметить, что эти два теста происходят не одновременно.
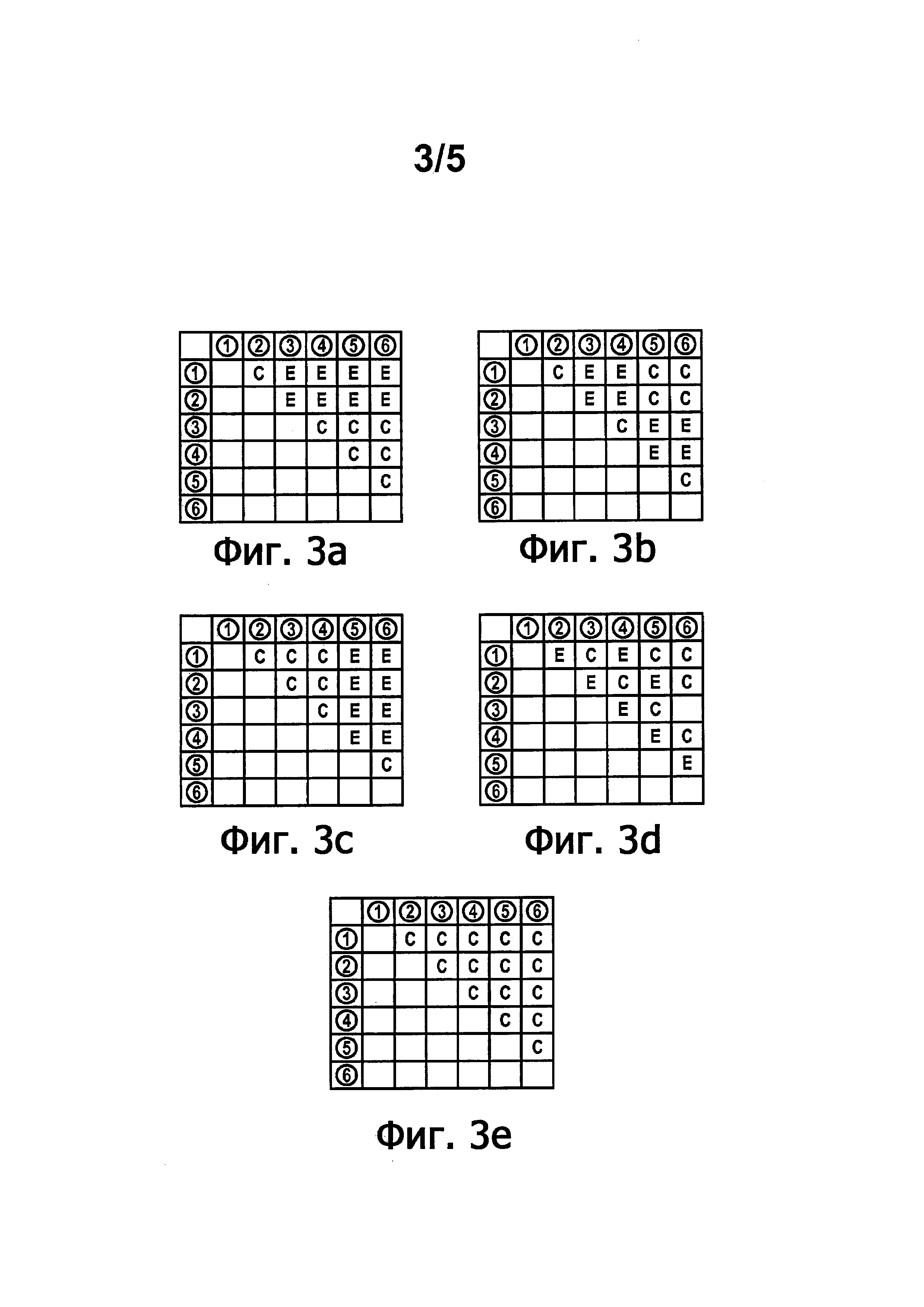
Вышеупомянутые тесты применяют для определения сигнатур, характерных для определенных видов отказов.
Сигнатуры различных видов отказов представлены в таблицах на фиг. 3а-3е.
Строки и столбцы 1-6 соответствуют модулям 5a-5f.
Ячейки, обозначенные С, соответствуют случаям RNP-когерентности, тогда как ячейки, обозначенные Е, соответствуют RNP-исключениям.
Картина на таблице 3а характерна для неисправности UMI 1.1, картина на таблице 3b характерна для неисправности UMI 1.2, картина на таблице 3c характерна для неисправности UMI 2 или общей неисправности блоков UMI типа 1, и, наконец, картина на таблице 3d характерна для неисправности GNSS1 или GNSS2 или для двух неисправностей спутников (GNSS1 или GNSS2).
Что касается фиг. 3е, то она является типичной для случая, когда неисправность отсутствует или когда присутствует только одна неисправность спутника.
После того как модуль 6 консолидации определит и обнаружит характеристическую сигнатуру, он может, в зависимости от случая, изолировать неверные навигационные решения (случай сигнатур, соответствующих, например, неисправности UMI 1.1 или UMI 1.2) или запустить дополнительные тесты, или получить указания извне.
В представленном выше описании был рассмотрен случай осуществления нескольких последовательных обработок между модулями обработки 5a-5f и модулем 6. Разумеется, можно также предусмотреть другие варианты, в которых обработку FDE осуществляют на всех измерениях, поступающих на вход различных модулей обработки 5a-5f от систем GNSS и от блоков UMI.
Поведение в случае работы в «инерциальном» режиме
Работа в «инерциальном» режиме (на базе только блоков UMI, используемых для обеспечения навигации в отсутствие гибридизации) на всех или некоторых модулях обработки происходит естественным образом, например, когда
- одна из двух систем GNSS1 или GNSS2 недоступна,
- приемник неисправен,
- используемый частотный диапазон зашумлен и не может быть использован приемником,
- геометрическая конфигурация и количество задействованных спутников не достаточны для подтверждения измерений приемника через P-RAIM (и V-RAIM, если гибридное устройство работает в режиме определения «дельта-области» или скорости).
При работе этого типа:
- гибридные навигационные выходы (выходы «ГИБР» модулей 5a-5f), данные и радиус безопасности изменяют когерентно в зависимости от движений;
- выработанные таким образом консолидированные значения (горизонтальные положение или скорость и соответствующее значение RHRNP(10-9)) остаются действительными.
Другие конфигурации осуществления или выполнения
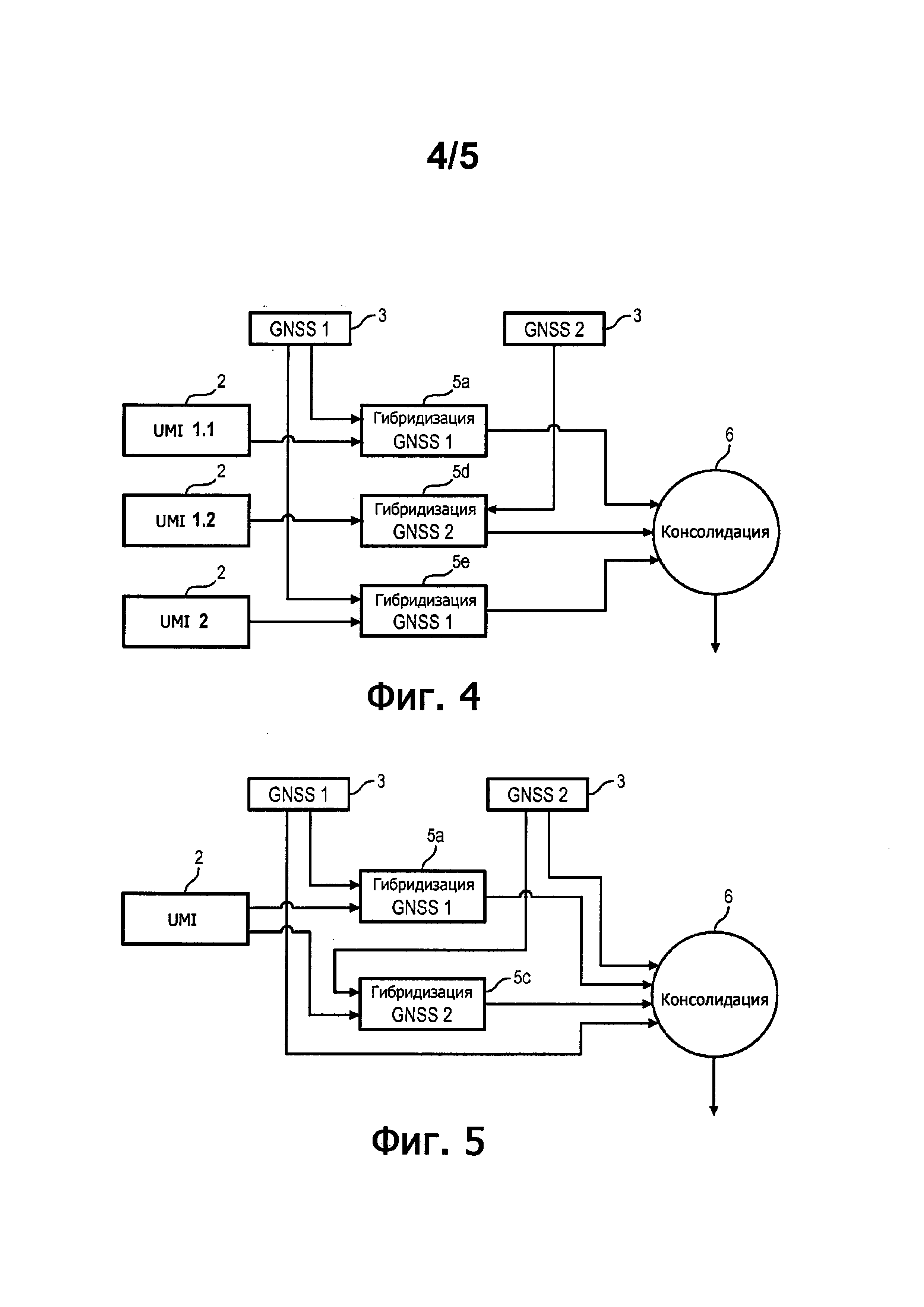
На фиг. 4 представлена другая возможная архитектура объединения/консолидации. В частности, в этом варианте, представленном на фиг. 4, сохранены только модули обработки 5а, 5d и 5е.
При такой архитектуре радионавигационные измерения GNSS1 используются одновременно на входе модулей обработки 5а и 5е, но другие входы одного или другого из этих двух модулей являются полностью независимыми, что касается их возможного отказа, так как речь идет об измерениях, поступающих от блока UMI 1.1 и от блока UMI 1.2, которые являются блоками двух независимых типов.
Точно так же, модули 5а и 5d получают на входе измерения от двух навигационных устройств, которые не являются независимыми с точки зрения их возможного отказа, так как они являются устройствами одного типа (UMI 1.1 и UMI 1.2). Вместе с тем, другие входные данные этих двух модулей поступают от навигационных устройств (в данном случае GNSS1 и GNSS2), которые являются независимыми с точки зрения их возможного отказа.
Преимуществом этой архитектуры является возможность обеспечения одинаковой надежности консолидированного измерения с такой же вероятностью, что и для каждого из модулей обработки, причем при полной вычислительной нагрузке, в два раза меньшей по сравнению с архитектурой, показанной на фиг. 1. Следовательно, она требует меньшей вычислительной мощности.
На фиг. 5 представлена еще одна возможная архитектура объединения/консолидации, в которой сохранены только модули обработки 5а и 5с.
При такой архитектуре радионавигационные измерения GNSS1 используются на входе модуля обработки 5а, а радионавигационные измерения GNSS2 используются на входе модуля обработки 5с.
Точно так же, модули 5а и 5с получают на входе измерения от двух навигационных устройств, которые не являются независимыми с точки зрения их возможного отказа, так как они являются устройствами одного типа (UMI 1.1 и UMI 1.2). Вместе с тем, другие входные данные этих двух модулей поступают от навигационных устройств (в данном случае GNSS1 и GNSS2), которые являются независимыми с точки зрения их возможного отказа.
В отличие от архитектур, показанных на фиг. 1 и на фиг. 4, эта архитектура не требует использования навигационных устройств разных типов. Следовательно, она является более простой в реализации, чем архитектуры, представленные на фиг. 1 и 4.
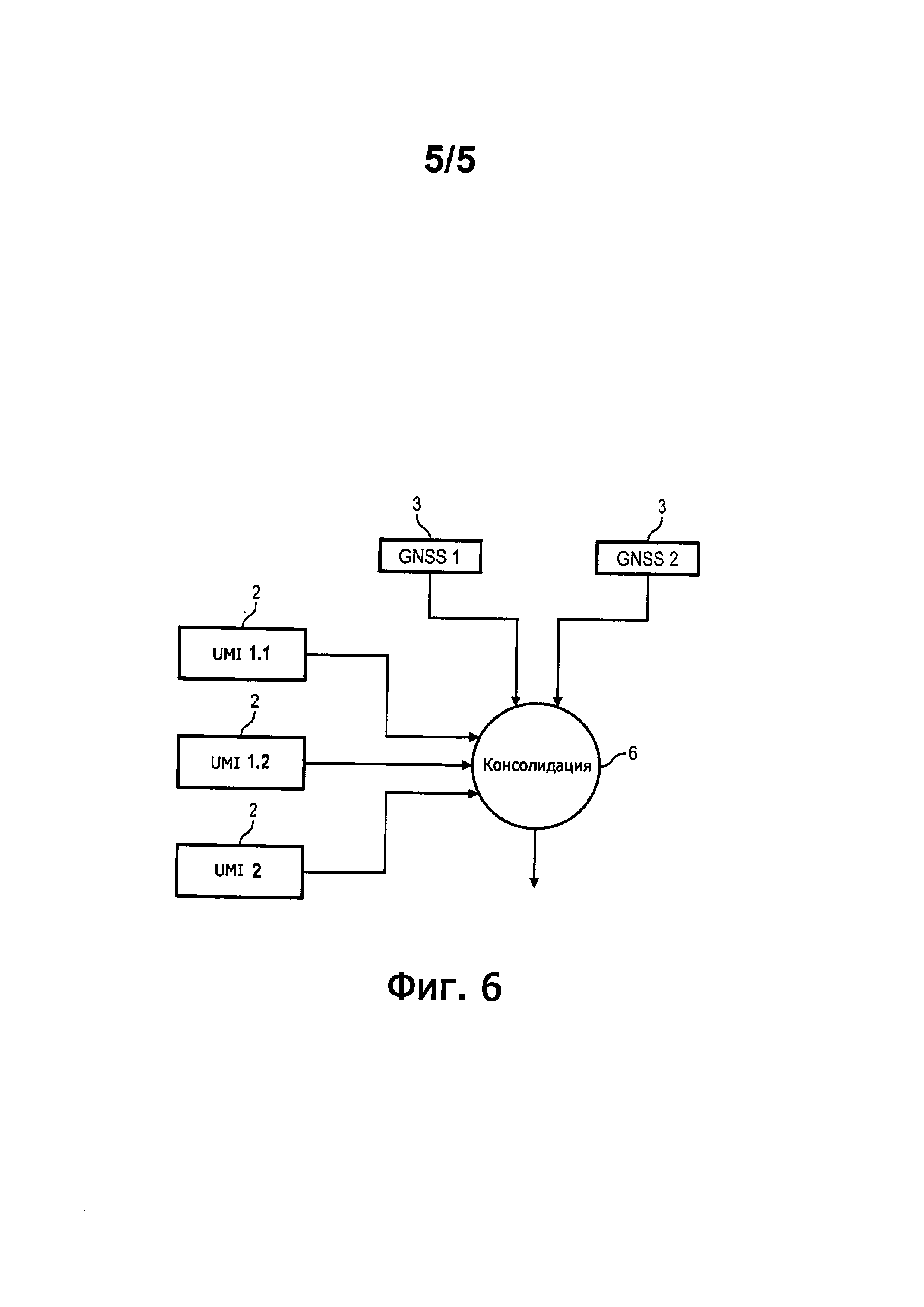
На фиг. 6 представлена еще одна возможная архитектура объединения/консолидации, в которой модули обработки отсутствуют, и модуль объединения/консолидации использует измерения, поступающие от навигационных устройств GNSS1 и GNSS2, которые являются независимыми с точки зрения их возможного отказа.
В целом предложенный способ можно применять для любых навигационных систем, использующих навигационные устройства с разными гипотезами неисправностей.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

