Результат интеллектуальной деятельности: Робот промышленный
Вид РИД
Изобретение
Изобретение относится к области промышленной робототехники и может быть использовано при проектировании роботов с внешними магнитными системами, а также может использоваться для механизации и технологических операций.
Известен промышленный робот (Авторское свидетельство Литвиненко A.M. №1537517, опубл. 23.01.90, бюл. №3, заявка 4365867/31-08 от 20.01.88), содержащий внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, в котором перемещаются закрепленные на вращающемся основании якори, соединенные с редукторами и далее со звеньями робота. Имеется поворотное основание (колонна с приводом поворота), рука со схватом, цилиндрический кольцевой зазор, образованный полюсными наконечниками, имеется также привод поворота плеча, на плече установлен блок приводов поворота локтя, поворота схвата, ротации схвата. Также он снабжен дополнительной рукой с приводами ее перемещения, при этом ось поворота дополнительной руки расположена концентрично оси поворота основной руки, а магнитные системы приводов выдвижения основной и дополнительной руки расположены коаксиально.
Недостатком данного изобретения является большие массогабаритные показатели, а также низкие технологические возможности, обусловленные малой маневренностью кинематической цепи.
Наиболее близким по технической сущности является промышленный робот (Авторское свидетельство Литвиненко A.M. СССР №1342723, опубл. 07.10.87, бюл. №37, заявка 4076643/31-08 от 20.06.86), содержащий внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, в котором перемещаются закрепленные на вращающемся основании якори, соединенные с редукторами и далее со звеньями робота. Имеется поворотное основание (колонна с приводом поворота), рука со схватом, цилиндрический кольцевой зазор образован полюсными наконечниками, имеется также привод поворота плеча, на плече установлен блок приводов поворота локтя, поворота схвата, ротации схвата.
Недостатком прототипа является низкие технологические возможности, обусловленные малой маневренностью кинематической цепи.
Изобретение направленно на повышение зоны обслуживания и уменьшение массы робота.
Это достигается тем, что робот промышленный содержит основание, платформу с рукой и схватом, внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, при этом на платформе и основании расположены сферические шарниры, причем между сферическими шарнирами основания и платформы установлены приводы поступательного перемещения, приводы поступательного перемещения выполнены в виде подвижного и неподвижного штоков, соединенных сферическими шарнирами соответственно с платформой и основанием, и четырех жестких токопроводящих шин, соединенных между собой с помощью подшипников и гибких токопроводящих элементов, при этом две жесткие токопроводящие шины в месте их перегиба соединены с подвижным штоком, а две другие жесткие токопроводящие шины в месте их перегиба соединены с неподвижным штоком.
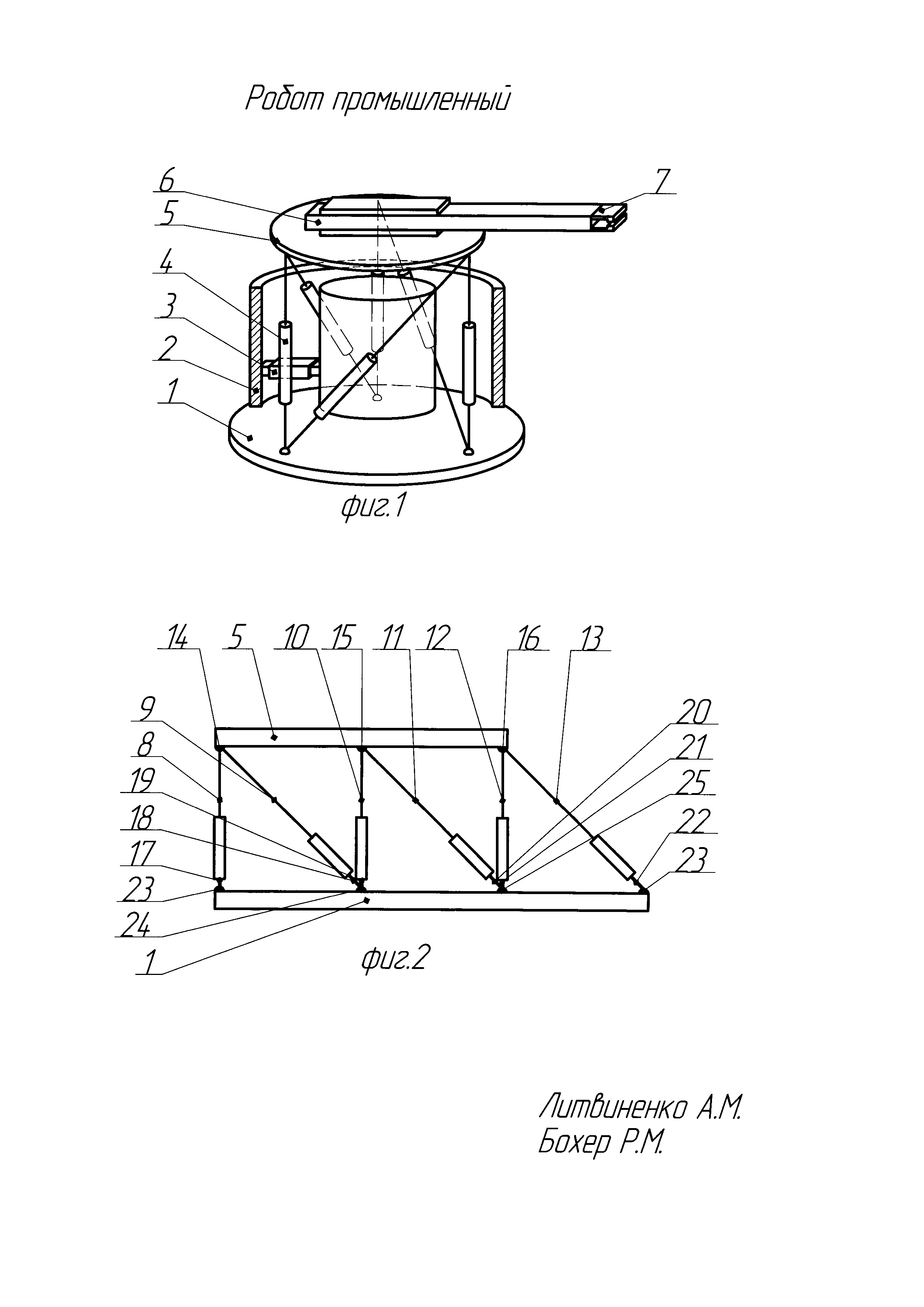
Изобретение иллюстрируется чертежом, где на фиг. 1 показан заявленный робот, вид спереди в разрезе. Схема соединения основания с платформой в развертке изображена на фиг. 2. Зона обслуживания изображена на фиг. 3. На фиг. 4 представлена схема работы привода поступательного перемещения.
Робот промышленный содержит основание 1, статор с полюсами 2 и обмотками 3, привод поступательного перемещения 4, платформу 5, на которой установлена рука 6 со схватом 7. Приводы поступательного перемещения 4 соединены с платформой 5 с помощью подвижных штоков 8, 9, 10, 11, 12, 13, соединяющихся с платформой 5 сферическими шарнирами 14, 15, 16. Привод поступательного перекрещения 4 имеет неподвижный шток 17, 18, 19, 20, 21, 22, который соединен сферическими шарнирами 23, 24, 25 с основанием 1. Привод поступательного перемещения содержит жесткие токопроводящие шины 26, 27, 28, 29, соединенные между собой подшипниками 30, 31, 32, 33 и гибкими токопроводящими элементами 34, 35, 36, 37, 38, 39. Жесткие токопроводящие шины 26, 27 в месте их перегиба соединены с подвижными штоками 40, а также подвижный шток 40 имеет две пружины 41, 42. Жесткие токопроводящие шины 28, 29 в месте их перегиба соединены с неподвижным штоком 43, на котором также имеются изолированные втулки 44, 45, которые являются выводами токопроводящих элементов 38, 39. Токопроводящие элементы 38, 39 крепятся к неподвижному штоку с помощью изолированной трубки 46.
Привод поступательного перемещения работает следующим образом. Для перемещения платформы в требуемом направлении необходимо подключить к источнику электрической энергии (не показан) обмотку 3 статора, который создаст магнитный поток в зазоре между полюсами 2, и привод поступательного перемещения 4. При включении источника электрической энергии ток в приводе поступательного перемещения протекает через токопроводящий элемент 39, который электрически соединен с шиной 29, шина 29 на противоположном конце электрически соединена с токопроводящим элементом 37, который электрически соединен с шиной 27, шина 27 соединена с подвижным штоком 40 и электрически с токопроводящим элементом 35. Данное соединение образует ветвь 47, которая вследствие протекания тока создает магнитное поле. Другая ветвь 48 подключена к токопроводящему элементу 35, который через токопроводящие элемент 34 передает ток на шину 26, шина 26 электрически соединена с противоположного конца с токопроводящим элементом 36, который подключен к шина 28, шина 28 электрически соединена с токопроводящим элементом 38. Ветвь 48 получает ток с токопроводящего элемента 35 и создает магнитное поле, но так как направление тока, протекающего по этим ветвям, противоположно, то происходит взаимное отталкивание ветвей 47 и 48. Это приводит к опусканию подвижного штока 40. Магнитное поле, создаваемое в зазоре между полюсами 6 статора, взаимодействует с магнитным полем ветвей 47 и 48, создаваемых в приводе поступательного перемещения, тем самым влияет на скорость и тяговое усилие привода поступательного перемещения. Для того чтобы поднять подвижный шток 40, используются пружины 41 и 42, для этого необходимо регулировать в приводе поступательного перемещения подаваемое напряжение и ток. Использование вышеописанного исполнения робота позволяет увеличить зону обслуживания, снизить массогабаритные показатели робота.
Введение платформы с рукой и схватом, внешней магнитной системы с обмотками, выполненной в виде индуктора с цилиндрическим зазором, платформа в основании редуктора снабжена сферическими шарнирами, причем между сферическими шарнирами основания и платформы установлены приводы поступательного перемещения, позволяет увеличить зону обслуживания, а привод поступательно перемещения, выполненный в виде четырех жестких токопроводящих шин, уменьшает массогабаритные показатели робота.
Робот промышленный, содержащий основание, платформу с рукой и схватом, внешнюю магнитную систему с обмотками, выполненную в виде индуктора с цилиндрическим зазором, при этом на платформе и основании расположены сферические шарниры, причем между сферическими шарнирами основания и платформы установлены приводы поступательного перемещения, отличающийся тем, что приводы поступательного перемещения выполнены в виде подвижного и неподвижного штоков, соединенных сферическими шарнирами соответственно с платформой и основанием, и четырех жестких токопроводящих шин, соединенных между собой с помощью подшипников и гибких токопроводящих элементов, при этом две жесткие токопроводящие шины в месте их перегиба соединены с подвижным штоком, а две другие жесткие токопроводящие шины в месте их перегиба соединены с неподвижным штоком.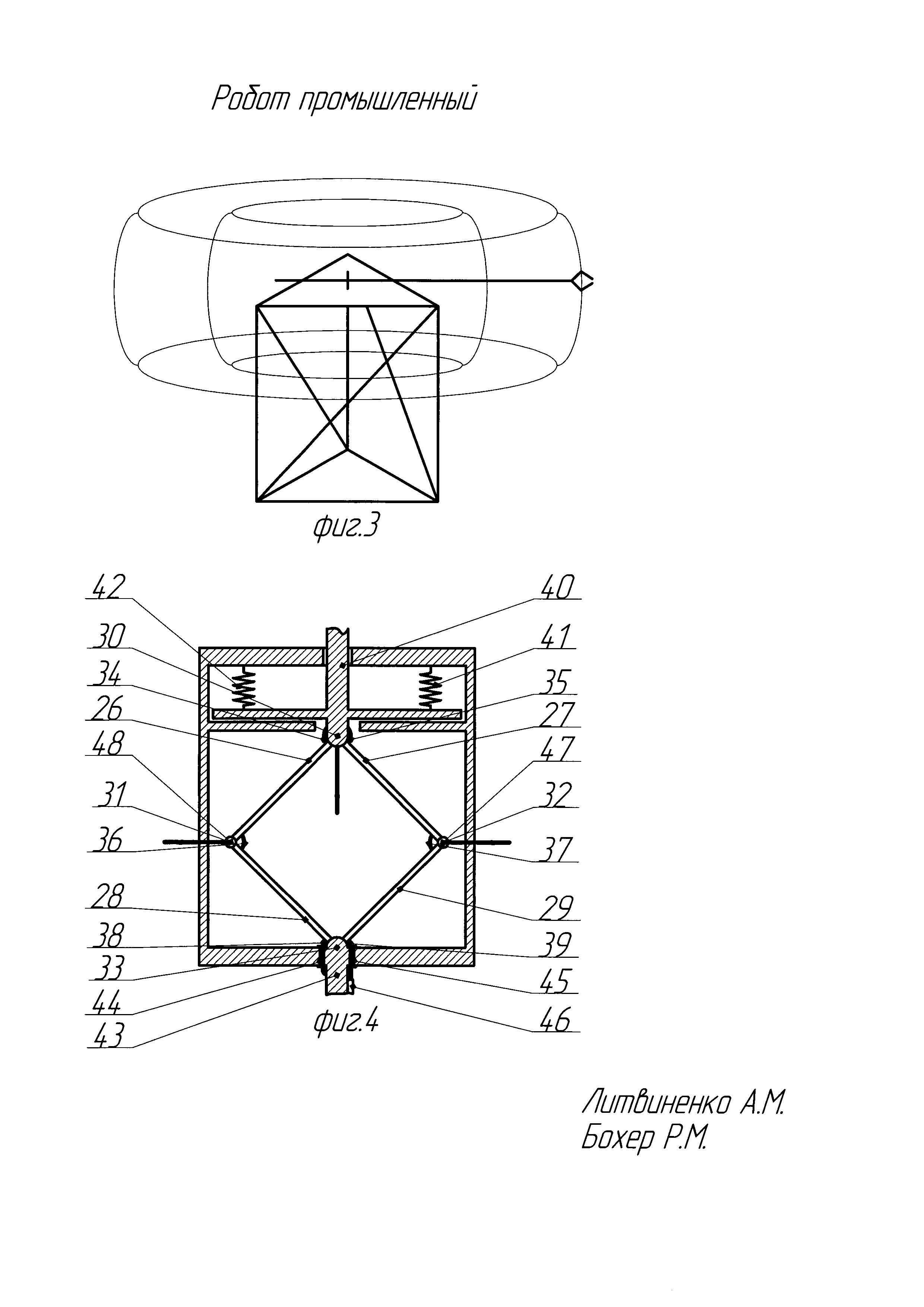
Вертикальный ротор
Ротор сегментного ветроэлектрогенератора
Генератор индукторный
Ветроэлектрогенераторная установка
Тормоз кривошипного пресса
Муфта кривошипно-шатунного пресса
Ветродвигатель
Ротор сегментного ветроэлектрогенератора
Орбитальный мотор-редуктор
Безредукторный ветроэлектроагрегат
Тракт охлаждения теплонапряженных конструкций
Пресс для штамповки с кручением
Статор ветроэлектрогенератора
Ветроэлектроагрегат
Способ подачи топлива в газотурбинный двигатель
Испаритель криогенной жидкости
Мехатронно-модульный робот
Индукторный синхронный генератор
Автотракторный бесконтактный электрогенератор
Ротор

