Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству для определения положения, способу определения положения и компьютерной программе определения положения для определения положения интервенционного инструмента внутри субъекта. Кроме того, изобретение относится к интервенционной системе, интервенционному способу и интервенционной компьютерной программе для выполнения интервенционной процедуры.
УРОВЕНЬ ТЕХНИКИ
В интервенционных процедурах обычно применяют флюороскопическую рентгеновскую систему для формирования флюороскопических рентгеновский изображений, которые представляют интервенционный инструмент внутри пациента. Затем положение интервенционного инструмента, в частности, положение наконечника интервенционного инструмента, определяют по флюороскопическому рентгеновскому изображению и показывают на дисплее для обеспечения врачу возможности выполнять интервенционную процедуру с наведением по установленному и показанному положению интервенционного инструмента. Необходимость применения рентгеновского излучения для определения положения интервенционного инструмента внутри пациента приводит к подведению относительно высокой дозы облучения к пациенту и персоналу, выполняющему интервенционную процедуру.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании устройства для определения положения, способа определения положения и компьютерной программы определения положения для определения положения интервенционного инструмента внутри субъекта, с которыми можно уменьшить дозу облучения, подводимую к субъекту. Другая задача настоящего изобретения состоит в создании интервенционной системы, интервенционного способа и интервенционной компьютерной программы для выполнения интервенционной процедуры, которые используют устройство для определения положения.
В соответствии с первым аспектом настоящего изобретения предложено устройство для определения положения для определения положения интервенционного инструмента внутри субъекта, при этом интервенционный инструмент содержит первую часть, подлежащую введению субъекту, и вторую часть, которая должна быть снаружи субъекта, когда первую часть вводят субъекту, причем устройство для определения положения содержит:
- блок обеспечения набора данных изображения для обеспечения набора данных изображения внутренней области субъекта,
- блок обеспечения положения инструмента для определения положения второй части интервенционного инструмента,
- блок обеспечения фактического изображения для обеспечения фактического изображения интервенционного инструмента внутри субъекта,
- блок определения относительного расположения в пространстве для определения относительного расположения в пространстве между положениями второй части снаружи субъекта и первой части внутри субъекта по фактическому изображению и положению второй части, и
- блок определения положения для определения положения первой части в обеспеченном наборе данных изображения в зависимости от положения второй части и относительного расположения в пространстве между первой частью и второй частью.
Поскольку блок определения относительного расположения в пространстве определяет относительное расположение в пространстве между положениями второй части снаружи субъекта и первой части внутри субъекта по фактическому изображению и положению второй части, при этом блок определения положения определяет положение первой части в обеспеченном наборе данных изображения в зависимости от положения второй части и относительного расположения в пространстве между первой частью и второй частью, то фактическое изображение, которое будет обычно формироваться подведением дозы облучения к субъекту, требуется только для определения относительного расположения в пространстве, а не для определения положения первой части. Следовательно, после того, как определено относительное расположение в пространстве, интервенционный инструмент можно перемещать внутри субъекта, и положение интервенционного инструмента внутри субъекта можно определять по фактическому положению второй части снаружи субъекта и установленному относительному расположению в пространстве, без обязательной потребности в формировании дополнительного фактического изображения. Приведенный подход позволяет уменьшить дозу облучения, подводимую к субъекту, если излучение применяют для получения фактического изображения интервенционного инструмента внутри субъекта.
Интервенционный инструмент предпочтительно является иглой или катетером.
Набор данных изображения предпочтительно является набором данных трехмерного изображения, подобным набору данных компьютерной томографии, магнитно-резонансной томографии, ультразвукового исследования, однофотонной эмиссионной компьютерной томографии, позитронной эмиссионной томографии и т.д. Блок обеспечения набора данных изображения может содержать блок памяти, в котором уже хранится набор данных изображения, и из которого может обеспечиваться набор данных изображения. Блок обеспечения набора данных изображения может быть также приемным блоком для приема набора данных изображения по проводному или беспроводному информационному соединению и для обеспечения принятого набора данных изображения. Блок обеспечения набора данных изображения может быть также самим соответствующим средством визуализации.
Блок обеспечения фактического изображения предпочтительно является рентгенографическим блоком для получения фактического изображения рентгеновской проекции интервенционного инструмента внутри субъекта. Фактическое изображение предпочтительно является двумерным флюороскопическим рентгеновским изображением.
Устройство для определения положения предпочтительно дополнительно содержит блок отображения для отображения представления первой части в установленном положении первой части в обеспеченном наборе данных изображения.
Во время интервенционной процедуры обычно важно знать положение наконечника интервенционного инструмента внутри субъекта. Поэтому установленное относительное расположение в пространстве предпочтительно обеспечивает относительное расположение в пространстве между по меньшей мере одной меткой на второй части интервенционного инструмента и наконечником интервенционного инструмента. Метки на второй части интервенционного инструмента зависят от метода, применяемого блоком обеспечения положения инструмента для обеспечения положения второй части интервенционного инструмента. Например, метки могут быть источниками света типа источников инфракрасного света, при этом блок обеспечения положения инструмента может получать по меньшей мере два изображения источников света в разных направлениях, обнаруживать источники света на по меньшей мере двух изображениях и определять положение второй части на основании положений обнаруженных источников света на по меньшей мере двух изображениях.
Субъект предпочтительно является живым существом, таким как пациент или животное, при этом устройство для определения положения может быть выполнено с возможностью определения положения наконечника, например, иглы или катетера внутри живого существа во время процедуры биопсии, абляционной процедуры и т.д.
Обеспеченный набор данных изображения, установленное положение второй части и фактическое изображение по меньшей мере первой части интервенционного инструмента внутри субъекта предпочтительно связаны или могут быть связаны с одной и той же опорной системой координат, чтобы сделать возможным для блока определения относительного расположения в пространстве определять относительное расположение в пространстве между первой и второй частями и для блока определения положения определять положение первой части в обеспеченном наборе данных изображения.
В варианте осуществления, фактическое изображение является двумерным изображением, получаемым блоком обеспечения фактического изображения, являющимся флюороскопическим блоком визуализации, положение которого также можно определять блоком обеспечения положения инструмента или другими блоком определения положения относительно трехмерной опорной системы координат, при этом блок определения относительного расположения в пространстве определяет двумерное положение наконечника интервенционного инструмента по двумерному изображению и преобразует двумерное положение в трехмерное положение в трехмерной опорной системе координат. Кроме того, блок обеспечения положения инструмента предпочтительно определяет также положение второй части относительно трехмерной опорной системы координат, при этом блок определения относительного расположения в пространстве определяет относительное расположение в пространстве между первой частью и второй частью в зависимости от установленных положений первой и второй частей.
Предпочтителен вариант, в котором блок определения относительного расположения в пространстве выполнен с возможностью определения положения дистального наконечника интервенционного инструмента по фактическому изображению и с возможностью определения относительного расположения в пространстве между положением второй части снаружи субъекта, в частности, меток на второй части, и положением первой части посредством определения относительного расположения в пространстве между положением второй части снаружи субъекта и установленным положением дистального наконечника внутри субъекта, при этом блок определения положения выполнен с возможностью определения положения дистального наконечника в обеспеченном наборе данных изображения в зависимости от положения второй части и относительного расположения в пространстве между дистальным наконечником и второй частью. В частности, блок обеспечения фактического изображения может быть выполнен с возможностью обеспечения фактического изображения интервенционного инструмента внутри субъекта, которое представляет дистальный наконечник первой части интервенционного инструмента, при этом блок определения относительного расположения в пространстве выполнен с возможностью определения положения дистального наконечника внутри субъекта посредством обнаружения дистального наконечника в фактическом изображении. Приведенный подход допускает точное определение положения дистального наконечника интервенционного инструмента субъекта обследования.
Блок определения относительного расположения в пространстве может обеспечивать графический пользовательский интерфейс для обеспечения пользователю возможности указывать положение дистального наконечника в фактическом изображении для обнаружения положения дистального наконечника, и/или блок определения относительного расположения в пространстве может быть выполнен с возможностью использования известных методов сегментации, например, основанных на пороговой обработке, для обнаружения положения дистального наконечника в фактическом изображении.
Первая часть интервенционного инструмента предпочтительно является удлиненной и гибкой. В варианте осуществления, упомянутая часть имеет известную длину внутри субъекта, при этом блок определения относительного расположения в пространстве выполнен с возможностью обнаружения формы, в частности, изгиба, интервенционного инструмента внутри субъекта и с возможностью определения положения дистального наконечника внутри субъекта в зависимости от обнаруженной формы внутри субъекта и известной длины внутри субъекта. Кроме того, фактическое изображение может представлять только промежуточную область первой части интервенционного инструмента внутри субъекта, при этом блок определения относительного расположения в пространстве может быть выполнен с возможностью обнаружения формы промежуточной области и, тем самым, определения траектории промежуточной области внутри субъекта, и с возможностью определения положения дистального наконечника путем экстраполяции обнаруженной траектории до конца известной длины внутри субъекта. Приведенный подход допускает точное определение положения дистального наконечника внутри субъекта, даже если сам дистальный наконечник не виден в фактическом изображении.
В варианте осуществления блок определения относительного расположения в пространстве выполнен с возможностью выполнения процедуры оптического измерения формы для определения относительного расположения в пространстве между положением второй части снаружи субъекта и первой частью внутри субъекта, при этом относительное расположение в пространстве определяется на основании формы первой части внутри субъекта и положения второй части снаружи субъекта, причем форма первой части внутри субъекта определяется посредством оптического измерения формы, при ограничительном условии, что измеренная форма первой части должна соответствовать форме первой части, представленной в фактическом изображении. Поэтому фактическое изображение можно использовать для повышения точности процедуры оптического измерения формы. Процедура оптического измерения формы может выполняться в соответствии с процедурой, раскрытой в документе WO 2011/141829 A1, который включен в настоящую заявку путем ссылки.
В предпочтительном варианте блок обеспечения фактического изображения выполнен с возможностью обеспечения по меньшей мере двух фактических изображений, которые были получены в разных направлениях получения, при этом блок определения относительного расположения в пространстве выполнен с возможностью определения положения первой части внутри субъекта по обеспеченным по меньшей мере двум фактическим изображениям. Данный подход дополнительно повышает точность определения относительного расположения в пространстве и, следовательно, определения положения первой части внутри субъекта.
В предпочтительном варианте осуществления, блок определения относительного расположения в пространстве выполнен с возможностью определения относительного расположения в пространстве посредством коррекции первоначально обеспеченного относительного расположения в пространстве на основании первой части внутри субъекта, представленной в фактическом изображении, и положения второй части. Использование точно установленного первоначального относительного расположения в пространстве для определения фактического относительного расположения в пространстве может дополнительно повысить точность определения относительного расположения в пространстве и, следовательно, определения положения первой части внутри субъекта.
Установленное относительное расположение в пространстве предпочтительно обеспечивает относительное расположение в пространстве между по меньшей мере одной меткой на второй части интервенционного инструмента и по меньшей мере одним местоположением на первой части. Например, относительное расположение в пространстве может быть относительным расположением в пространстве между по меньшей мере одной меткой на второй части интервенционного инструмента и дистальным наконечником интервенционного инструмента. Для определения относительного расположения в пространстве положение наконечника и/или форму интервенционного инструмента внутри субъекта можно обнаруживать в фактическом изображении, при этом упомянутую информацию о положении и/или форме можно использовать для определения относительного расположения в пространстве между второй частью снаружи субъекта и первой частью внутри субъекта. В варианте осуществления, относительное расположение в пространстве первоначально обеспечивают позиционированием наконечника интервенционного инструмента в известной точке отсчета и определением положения по меньшей мере одной метки на второй части.
В другом предпочтительном варианте блок обеспечения положения инструмента выполнен с возможностью определения положения второй части интервенционного инструмента с помощью по меньшей мере одного из оптического или магнитного методов. Например, для определения положения второй части интервенционного инструмента, в частности, для сопровождения второй части интервенционного инструмента в то время, когда интервенционный инструмент перемещают, блок обеспечения положения инструмента может быть выполнен с возможностью использования оптических способов сопровождения, раскрытых в документе WO 1999/056654 A1, который включен в настоящую заявку путем ссылки. В частности, вторая часть интервенционного инструмента может содержать источники инфракрасного света в качестве меток, находящихся в положениях, в частности, которые известны по отношению к интервенционному инструменту, при этом блок обеспечения положения инструмента может содержать по меньшей мере две камеры для формирования изображений, представляющих источники инфракрасного света, и определять положение второй части интервенционного инструмента в зависимости от положений источников инфракрасного света в сформированных изображениях.
В соответствии с другим аспектом настоящего изобретения предложена интервенционная система для выполнения интервенционной процедуры, при этом интервенционная система содержит:
- интервенционный инструмент для выполнения интервенционной процедуры внутри субъекта, и
- устройство для определения положения для определения положения интервенционного инструмента внутри субъекта по пункту 1 формулы изобретения.
В соответствии с другим аспектом настоящего изобретения предложен способ определения положения для определения положения интервенционного инструмента внутри субъекта, при этом интервенционный инструмент содержит первую часть, подлежащую введению субъекту, и вторую часть, которая должна быть снаружи субъекта, когда первую часть вводят субъекту, причем способ определения положения содержит этапы, на которых:
- обеспечивают набор данных изображения внутренней области субъекта посредством блока обеспечения набора данных изображения,
- определяют положение второй части интервенционного инструмента посредством блока обеспечения положения инструмента,
- обеспечивают фактическое изображение интервенционного инструмента внутри субъекта посредством блока обеспечения фактического изображения,
- определяют относительное расположение в пространстве между положениями второй части снаружи субъекта и первой части внутри субъекта по фактическому изображению и положению второй части посредством блока определения относительного расположения в пространстве, и
- определяют положение первой части в обеспеченном наборе данных изображения в зависимости от положения второй части и относительного расположения в пространстве между первой частью и второй частью посредством блока определения положения.
В соответствии с другим аспектом настоящего изобретения предложена компьютерная программа определения положения для определения положения интервенционного инструмента внутри субъекта, при этом компьютерная программа определения положения содержит программное кодовое средство, побуждающее устройство для определения положения по пункту 1 формулы изобретения выполнять этапы способа определения положения по пункту 12 формулы изобретения, когда компьютерная программа выполняется компьютером, управляющим устройством для определения положения.
В соответствии с другим аспектом настоящего изобретения предложена интервенционная компьютерная программа для выполнения интервенционной процедуры, при этом интервенционная компьютерная программа содержит программное кодовое средство, побуждающее интервенционную систему по пункту 11 формулы изобретения выполнять следующие этапы, когда компьютерная программа выполняется компьютером, управляющим интервенционной системой:
- выполняют интервенционную процедуру внутри субъекта посредством интервенционного инструмента, и
- определяют положение интервенционного инструмента внутри субъекта по пункту 12 формулы изобретения посредством устройства для определения положения.
Следует понимать, что устройство для определения положения по пункту 1 формулы изобретения, интервенционная система по пункту 11 формулы изобретения, способ определения положения по пункту 12 формулы изобретения, компьютерная программа определения положения по пункту 13 формулы изобретения и интервенционная компьютерная программа по пункту 14 формулы изобретения имеют похожие и/или одинаковые предпочтительные варианты осуществления, в частности, по зависимым пунктам формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может быть также любым сочетанием зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Приведенные и другие аспекты изобретения будут очевидны из пояснения со ссылкой на нижеописанные варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На нижеприведенных чертежах:
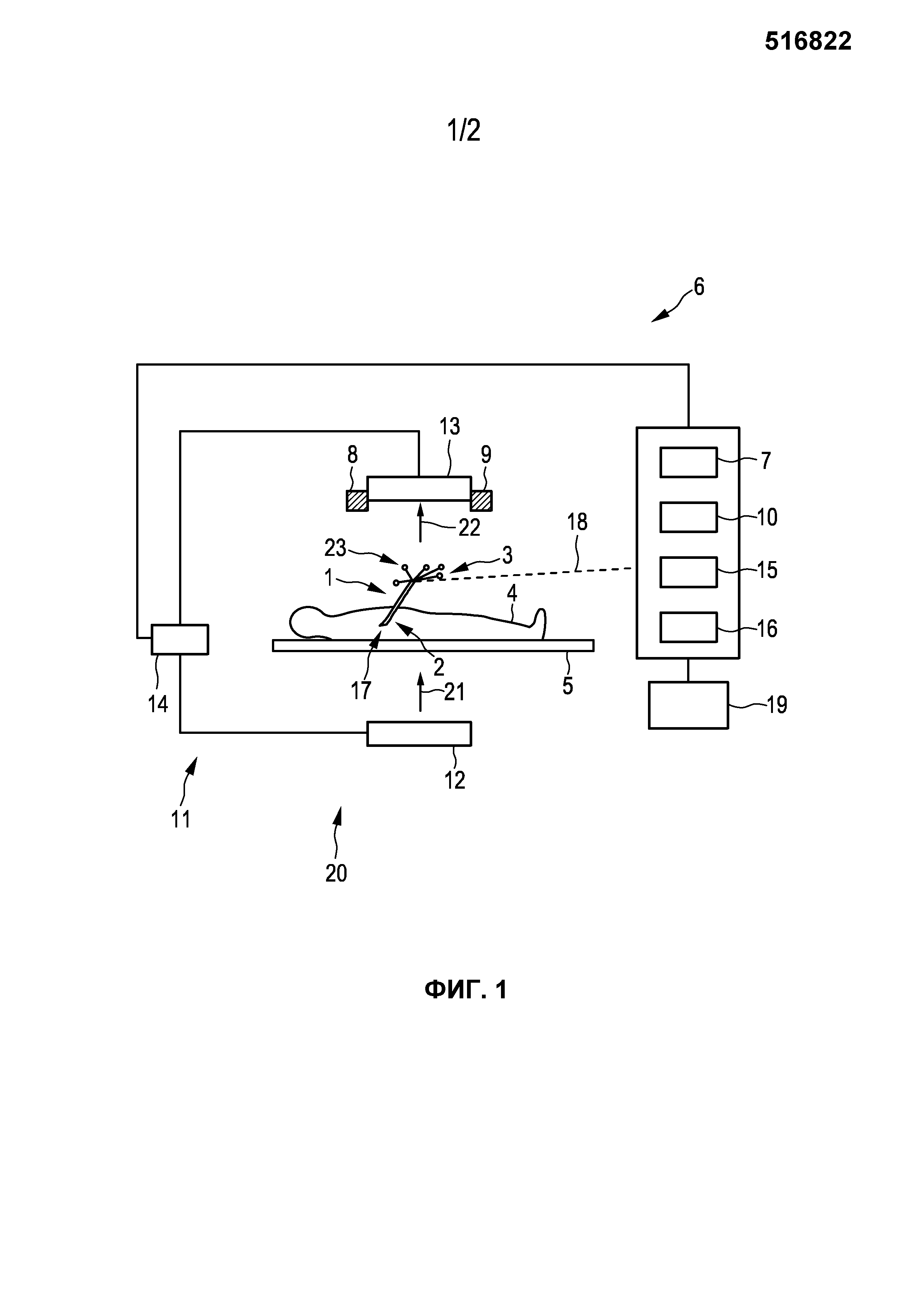
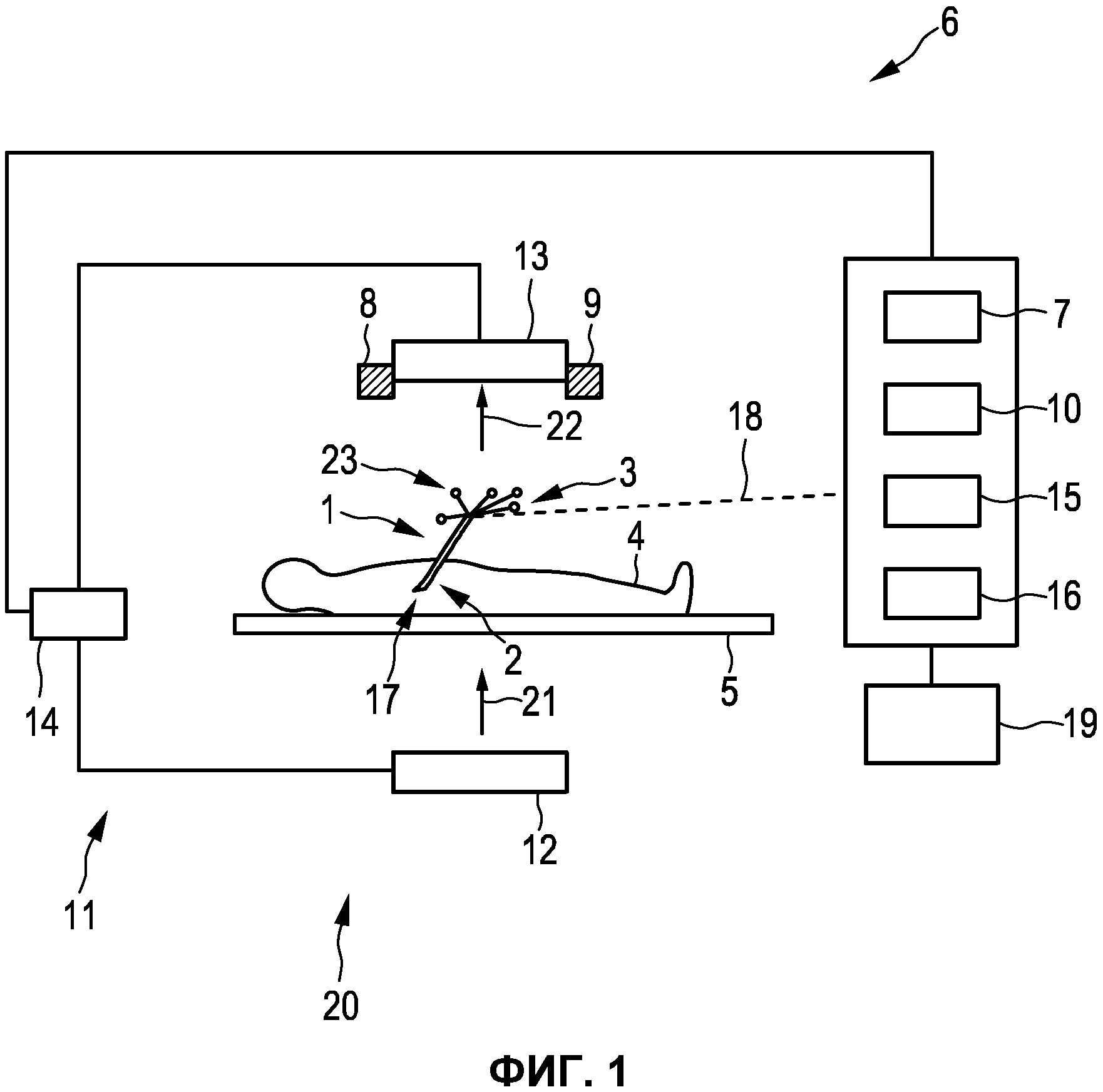
Фиг. 1 – схематическое изображение примерного варианта осуществления интервенционной системы для выполнения интервенционной процедуры, и
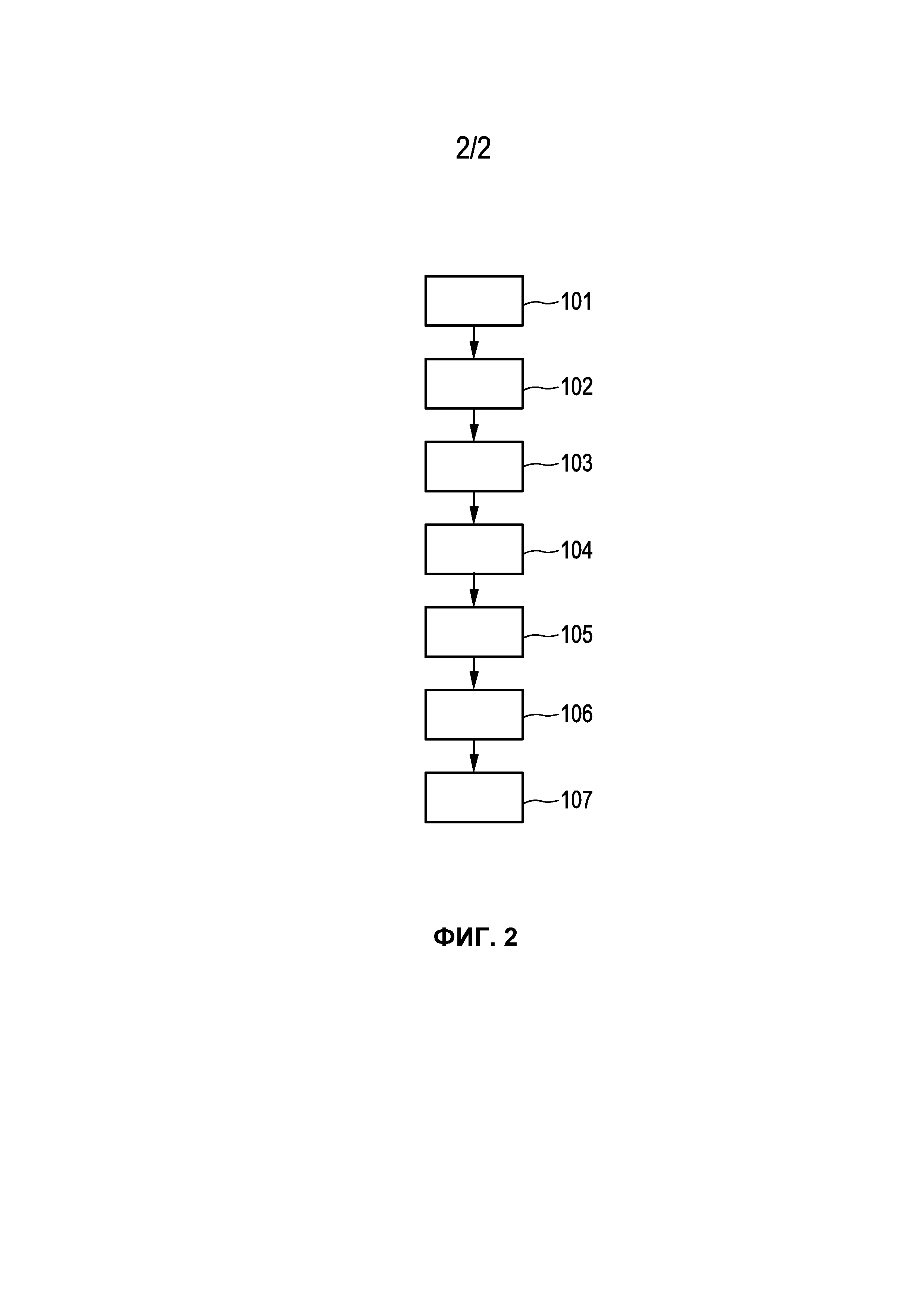
Фиг. 2 – блок-схема последовательности операций примерного варианта осуществления интервенционного способа для выполнения интервенционной процедуры.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 схематически представлен примерный вариант осуществления интервенционной системы 20 для выполнения интервенционной процедуры. Интервенционная система 20 содержит интервенционный инструмент 1, представляющий собой, в данном варианте осуществления, иглу для выполнения интервенционной процедуры внутри пациента 4, размещенного на столе 5. Интервенционная система 20 дополнительно содержит устройство 6 для определения положения для определения положения интервенционного инструмента 1 внутри пациента 4. Интервенционный инструмент 1 содержит первую часть 2, подлежащую введению в пациента 4, и вторую часть 3, которая должна быть снаружи пациента 4, когда первую часть 2 вводят в пациента 4.
Устройство 6 для определения положения содержит блок 7 обеспечения набора данных изображения для обеспечения набора данных изображения внутренней области пациента 4, блок 8, 9, 10 обеспечения положения инструмента для определения положения второй части 3 интервенционного инструмента 1 и блок 11 обеспечения фактического изображения для обеспечения фактического изображения интервенционного инструмента 1 внутри пациента 4. Устройство 6 для определения положения дополнительно содержит блок 15 определения относительного расположения в пространстве для определения относительного расположения в пространстве между положениями второй части 3 снаружи пациента 4 и первой части 2 внутри пациента 4 по фактическому изображению и положению второй части 3 и блок 16 определения положения для определения положения первой части 2 в обеспеченном наборе данных изображения в зависимости от положения второй части 3 и относительного расположения в пространстве между первой частью 2 и второй частью 3.
Блок 11 обеспечения фактического изображения является рентгенографическим блоком для получения фактического изображения рентгеновской проекции интервенционного инструмента 1 внутри пациента 4 во время интервенционной процедуры. В данном варианте осуществления блок 11 обеспечения фактического изображения является флюороскопической рентгеновской системой с C-образной консолью, получающей двумерное флюороскопическое рентгеновское изображение для обеспечения фактического изображения интервенционного инструмента 1 внутри пациента 4. Данная система содержит рентгеновский источник 12 для генерации рентгеновского излучения 21, подлежащего направлению в область внутри пациента 4, где находится интервенционный инструмент 1. Генерируемое рентгеновское излучение 21 проходит сквозь пациента 4, и прошедшее рентгеновское излучение 22 регистрируется блоком 13 регистрации рентгеновского излучения. Рентгеновский источник 12 и блок 13 регистрации рентгеновского излучения установлены на C-образной консоли таким образом, что их можно перемещать, в частности, поворачивать, относительно пациента 4, чтобы сделать для блока 11 обеспечения фактического изображения возможным обеспечение фактического изображения, представляющего искомую область внутри пациента 4 в искомом направлении. Рентгеновский источник 12 и блок 13 регистрации рентгеновского излучения действуют под управлением блока 14 управления флюороскопией.
Набор данных изображения является набором данных трехмерного изображения, являющимся, в данном варианте осуществления, набором данных трехмерного компьютерного томографического изображения. В других вариантах осуществления, набор данных изображения может быть также набором данных двумерного изображения. Кроме того, набор данных изображения может быть набором данных изображения другого средства визуализации, например, набором данных изображения магнитно-резонансной томографии, ультразвукового исследования, однофотонной эмиссионной компьютерной томографии, позитронной эмиссионной томографии и т.д. Блок 7 обеспечения набора данных изображения является блоком памяти, в котором уже хранится набор данных изображения, и из которого может обеспечиваться набор данных изображения. Блок обеспечения набора данных изображения может быть также приемным блоком для приема набора данных изображения по проводному или беспроводному информационному соединению и для обеспечения принятого набора данных изображения. Кроме того, в другом варианте осуществления, блок обеспечения набора данных изображения может быть также самим соответствующим средством визуализации. В данном варианте осуществления, блок 11 обеспечения фактического изображения выполнен с возможностью получения изображений проекций пациента 4 в разных направлениях и с возможностью реконструкции компьютерного томографического изображения в виде обеспеченного набора данных изображения, который сохраняется в блоке памяти, по данным проекций перед выполнением интервенционной процедуры. Однако, набор данных изображения может быть также сформирован системой компьютерной томографии.
Блок обеспечения положения инструмента выполнен с возможностью определения положения второй части 3 интервенционного инструмента 1 оптическим методом. Блок обеспечения положения инструмента содержит две камеры 8, 9 для получения изображений меток 23, присоединенных ко второй части 3 интервенционного инструмента 1. Метки 23 могут быть пассивными метками, которые не посылают в активном режиме оптическое излучение в камеры 8, 9, или упомянутые метки могут быть активными метками, т.е. источниками света, посылающими излучение в камеры 8, 9. Например, метки 23 могут быть источниками инфракрасного света, и камеры 8, 9 могут быть инфракрасными камерами для получения инфракрасных изображений, представляющих источники 23 инфракрасного света. Изображения, полученные камерами 8, 9, подаются в блок 10 определения положения инструмента для определения положения второй части 3 интервенционного инструмента 1, в частности, метки 23 на второй части 3, на основании положений меток 23 в полученных изображениях. Если желательно, после этого можно определить положение всей второй части 3 на основании известных реальных положений меток 23 относительно второй части 3 интервенционного инструмента 1 и установленных положений меток 23. Для определения положения второй части 3 по изображениям, полученным камерами 8, 9, можно применить известные алгоритмы сопровождения, подобные алгоритму сопровождения, раскрытому в документе WO 1999/056654 A1, который включен в настоящую заявку путем ссылки. Для определения положения второй части 3 интервенционного инструмента 1 снаружи пациента 4 можно применять также другие известные оптические или неоптические, например, магнитные методы сопровождения.
В данном варианте осуществления, блок 15 определения относительного расположения в пространстве выполнен с возможностью определения положения дистального наконечника 17 интервенционного инструмента 1 по фактическому изображению и с возможностью определения относительного расположения в пространстве между положением второй части 3 снаружи пациента 4 и положением первой части 2 посредством определения относительного расположения в пространстве между положением второй части 3, в частности, меток 23 второй части, снаружи пациента 4 и установленным положением дистального наконечника 17 внутри пациента 4, при этом блок 16 определения положения выполнен с возможностью определения положения дистального наконечника 17 в обеспеченном наборе данных изображения в зависимости от положения второй части 3 и относительного расположения в пространстве между дистальным наконечником 17 и второй частью 3. В частности, блок 11 обеспечения фактического изображения выполнен с возможностью обеспечения фактического изображения интервенционного инструмента 1 внутри пациента 4, которое представляет дистальный наконечник 17 первой части 2 интервенционного инструмента 1, при этом блок 15 определения относительного расположения в пространстве выполнен с возможностью определения положения дистального наконечника 17 внутри пациента 4 посредством обнаружения дистального наконечника 17 в фактическом изображении. Блок 15 определения относительного расположения в пространстве может обеспечивать графический пользовательский интерфейс для обеспечения пользователю возможности указывать положение дистального наконечника 17 в фактическом изображении для обнаружения положения дистального наконечника 17, и/или блок 15 определения относительного расположения в пространстве может быть выполнен с возможностью использования известных методов сегментации, например, основанных на пороговой обработке, для обнаружения положения дистального наконечника 17 в фактическом изображении.
Определение относительного расположения в пространстве может выполняться коррекцией первоначально обеспеченного относительного расположения в пространстве на основании первой части 2 внутри пациента 4, представленной в фактическом изображении, и положения второй части 3. Для определения первоначального относительного расположения в пространстве, дистальный наконечник 17 интервенционного инструмента 1 можно поместить в известном местоположении снаружи пациента 4 до того, как выполняют интервенционную процедуру, в то время, как положение второй части 3, в частности, меток 23, определяют блоком 8, 9, 10 обеспечения положения инструмента. Таким образом, первоначальное относительное расположение в пространстве можно обеспечить калибровочной процедурой, при этом наконечник 17 размещают в известной базовой точке.
В частности, на основании установленного положения второй части 3 интервенционного инструмента 1 и первоначально обеспеченного относительного расположения в пространстве можно определить нескорректированное положение дистального наконечника 17 внутри пациента 4 во время интервенционной процедуры. Можно задать плоскость проекции, которая содержит данное нескорректированное положение, и которая перпендикулярна оси флюороскопической системы 11, соединяющей рентгеновский источник 12 и рентгеновский детектор 13. На данную плоскость проекции может фактически проецироваться реальное положение дистального наконечника 17 в фактическом изображении, т.е. в флюороскопическом изображении, после чего можно определить смещение между нескорректированным положением дистального наконечника и реальным положением дистального наконечника. Упомянутое смещение можно вносить в первоначальное относительное расположение в пространстве между дистальным наконечником и второй частью, в частности, между дистальным наконечником и метками на второй части, для коррекции относительного расположения в пространстве и, тем самым, определения фактического относительного расположения в пространстве между положением второй части 3 снаружи пациента 4 и положением первой части 2 внутри пациента 4.
Камеры 8, 9 жестко закреплены к рентгеновскому детектору 13 таким образом, что блок 8, 9, 10 обеспечения положения инструмента и блок 11 обеспечения фактического изображения выставлены один относительно другого, т.е. соответствующие положения первой и второй частей, в частности, меток на второй части и дистального наконечника, известны относительно одной и той же опорной системы координат, в которой могут быть выполнены процедуры обнаружения и определения. В качестве альтернативы или дополнения камеры могут быть жестко закреплены к C-образной консоли, служащей опорой для рентгеновского источника 12 и рентгеновского детектора 13. Если в другом варианте осуществления блок обеспечения положения инструмента и блок обеспечения фактического изображения не имеют жесткого соединения между собой, то упомянутые блоки можно выставить другими средствами. Например, блок обеспечения положения инструмента может быть также выполнен с возможностью определения положения блока обеспечения фактического изображения, в частности, флюороскопической системы 11, чтобы выставлять блок обеспечения фактического изображения и блок обеспечения положения инструмента один относительно другого. Для определения положения блока обеспечения фактического изображения, блок обеспечения фактического изображения может содержать метки, которые могут обнаруживаться блоком обеспечения положения инструмента.
Обеспеченный набор данных изображения выставляется относительно положений и изображений, обеспеченных блоком обеспечения положения инструмента и блока обеспечения фактического изображения. Такое выставление может достигаться автоматически, если, например, блок 11 обеспечения фактического изображения применяют не только для обеспечения по меньшей мере одного фактического изображения, а применяют также для обеспечения данных проекций, которые используют для реконструкции набора данных изображения, т.е. в данном варианте осуществления, набора данных рентгеновского компьютерного томографического изображения. В качестве альтернативы или дополнения можно применять другие методы выставления для согласования набора данных изображения внутренней области пациента 4 с положениями и изображениями, обеспечиваемыми блоком обеспечения положения инструмента и блоком обеспечения фактического изображения. Например, элементы, видимые в фактическом изображении и наборе данных изображения, можно использовать для выставления фактического изображения и набора данных изображения одного относительно другого.
Устройство 6 для определения положения дополнительно содержит блок 19 отображения для отображения представления первой части 2, в частности, дистального наконечника 17, в установленном положении в обеспеченном наборе данных изображения, т.е. в данном варианте осуществления, в наборе данных трехмерного компьютерного томографического изображения.
Флюороскопическая система 11 может обеспечивать по меньшей мере два фактических изображения, т.е. по меньшей мере два двумерных флюороскопических рентгеновских изображения, которые были получены в разных направлениях получения, при этом блок 15 определения относительного расположения в пространстве может быть выполнен с возможностью определения положения первой части 2, в частности, положения дистального наконечника 17, внутри пациента по обеспеченным по меньшей мере двум фактическим изображениям.
Первая часть 2 интервенционного инструмента 1 предпочтительно является удлиненной и гибкой. В варианте осуществления, длина части интервенционного инструмента 1 внутри пациента 4 известна, и фактическое изображение не представляет дистальный наконечник 17 интервенционного инструмента. Длина интервенционного инструмента 1 внутри пациента 4 может быть известна, например, по меткам, которые находятся еще снаружи пациента 4, и относительно которых определена соответствующая длина внутри пациента 4, или длину интервенционного инструмента снаружи пациента 4 можно определять и вычитать из суммарной длины интервенционного инструмента 1. В данном варианте осуществления, блок 15 определения относительного расположения в пространстве может быть выполнен с возможностью обнаружения формы, в частности, изгиба, интервенционного инструмента 1 внутри пациента 4 и с возможностью определения положения дистального наконечника 17 внутри пациента 4 в зависимости от обнаруженной формы внутри пациента 4 и известной длины внутри пациента 4. Фактическое изображение может представлять только промежуточную область первой части 2 интервенционного инструмента 1 внутри пациента 4, при этом блок 15 определения относительного расположения в пространстве может быть выполнен с возможностью обнаружения формы промежуточной области для обнаружения, тем самым, траектории промежуточной области внутри пациента 4 и с возможностью определения положения дистального наконечника 17 путем экстраполяции обнаруженной траектории до конца известной длины внутри субъекта 4.
В другом варианте осуществления, блок определения относительного расположения в пространстве может быть выполнен с возможностью выполнения процедуры оптического измерения формы для определения относительного расположения в пространстве между положением второй части 3 снаружи пациента 4 и первой частью 2 внутри пациента 4, при этом относительное расположение в пространстве определяется на основании формы первой части 2 внутри пациента 4 и положения второй части 3 снаружи пациента 4, и, причем форма первой части 2 внутри пациента 4 определяется посредством оптического измерения формы, при ограничительном условии, что установленная форма первой части 2 должна соответствовать форме первой части 2, представленной в фактическом изображении. В частности, форма первой части 2, установленная посредством оптического измерения формы, может фактически проецироваться на двумерную чувствительную поверхность блока 13 регистрации рентгеновского излучения, при этом процедура оптического измерения формы может таким образом определять форму первой части 2 внутри пациента 4, чтобы спроецированная форма была сходной с формой первой части, обнаруженной в реальном изображении. Для выполнения процедуры оптического измерения формы, интервенционный инструмент может содержать оптические волокна, и интервенционный инструмент соединен дополнительным оптическим соединением 18 с блоком определения относительного расположения в пространстве для обеспечения блоку определения относительного расположения в пространстве возможности определять форму первой части интервенционного инструмента внутри пациента. Известный метод оптического измерения формы основан на итерационной реконструкции трехмерной формы волокна по результатам измерений деформаций в оптических волокнах. За более подробным описанием упомянутой известной процедуры оптического измерения формы следует обратиться, например, к документу WO 2011/141829 A1, который включен в настоящую заявку путем ссылки.
В дальнейшем, со ссылкой на блок-схему последовательности операций способа на фиг.2 приведено для примера описание варианта осуществления интервенционного способа для выполнения интервенционной процедуры.
На этапе 101, набор данных изображения внутренней области пациента обеспечивается блоком 7 обеспечения набора данных изображения. В частности, обеспечивается трехмерное компьютерное томографическое изображение пациента 4. На этапе 102 выполняют интервенционную процедуру внутри пациента 4 с использованием интервенционного инструмента 1. Например, в пациента 4 вводят иглу. Затем, на этапе 103 определяют положение второй части интервенционного инструмента посредством блока 8, 9, 10 обеспечения положения инструмента, и на этапе 104 обеспечивают фактическое изображение интервенционного инструмента внутри пациента 4 посредством блока 11 обеспечения фактического изображения. На этапе 105 определяют относительное расположение в пространстве между положением второй части снаружи пациента и первой частью внутри пациента по фактическому изображению и положению второй части посредством блока 15 определения относительного расположения в пространстве. На этапе 106 определяют положение первой части в обеспеченном наборе данных изображения в зависимости от положения второй части и относительного расположения в пространстве между первой частью и второй частью посредством блока 16 определения положения, при этом на этапе 107 блок 19 отображения отображает обеспеченный набор данных изображения вместе с установленным положением первой части.
В других вариантах осуществления приведенные этапы можно выполнять в другом порядке. Например, положение второй части интервенционного инструмента можно определять после обеспечения фактического изображения, или приведенные операции определения и обеспечения можно выполнять одновременно. Кроме того, этапы 105 и 106 также можно выполнять одновременно. Например, относительное расположение в пространстве можно определять коррекцией нескорректированного установленного положения первой части внутри пациента, которое было определено на основании первоначально обеспеченного относительного расположения в пространстве, при этом на основании фактического положения первой части, представленной в фактическом изображении, установленное положение первой части можно скорректировать, тем самым, с одновременной коррекцией и, следовательно, определением относительного расположения в пространстве и положения первой части внутри пациента. Если интервенционная процедура продолжается, например, если интервенционный инструмент перемещают дальше внутри пациента, то фактическое положение первой части, в частности, дистального наконечника интервенционного инструмента, можно определять на основании скорректированного относительного расположения в пространстве и фактического положения второй части, обязательной потребности в дополнительном фактическом изображении, в частности без потребности в дополнительном флюороскопическом рентгеновском изображении.
Этапы 102-107 можно рассматривать как этапы способа определения положения для определения положения интервенционного инструмента внутри субъекта.
Сопровождение интервенционного устройства, т.е. сопровождение интервенционного инструмента, во время минимально инвазивных процедур в теле человека имеет большее значение для обладания способностью точно достигать правильного местоположения для диагностики или лечения. Способ сопровождения интервенционного устройства представляет собой применение рентгеновского наведения. Несмотря на то, что сопровождение можно выполнять с рентгеновским наведением, его недостатком является доза рентгеновского излучения, которая подводится как к пациенту, так и врачу. Для уменьшения упомянутой дозы рентгеновского излучения применено оптическое наведение на базе нескольких камер, прикрепленных к детектору рентгеновского устройства, как раскрыто, например, в документе WO 1999/056654 A1. Упомянутое оптическое наведение допускает сопровождение инструмента без дозы рентгеновского излучения на основании трехмерной визуализации интервенционного устройства снаружи пациента и трехмерной визуализации пациента. Недостаток упомянутого оптического метода состоит в том, что внутреннюю часть тела нельзя видеть, и поэтому сопровождение устройства базируется на том, что можно видеть снаружи тела. Проблема, которая возникает с упомянутым методом оптического наведения, является то, что с момента, когда интервенционное деформируется, например, изгиба иглы во время введения, способ оптического наведения становится менее точным.
Устройство для определения положения, описанное выше со ссылкой на фиг.1, может усовершенствовать определение местонахождения дистального наконечника интервенционного устройства при оптическом сопровождении, с одновременной минимизацией требуемой дозы рентгеновского излучения. Устройство для определения положения может решить присущую известному уровню техники проблему неточного определения местонахождения наконечника интервенционного инструмента посредством выполнения сопровождения интервенционного инструмента с помощью оптических меток, описанных в документе WO 1999/056654 A1, при этом во время введения интервенционного инструмента получают по меньшей мере одно фактическое изображение, т.е. по меньшей мере одно двумерное флюороскопическое рентгеновское изображение, причем из данного изображения выводят изгиб интервенционного инструмента или фактическое положение наконечника интервенционного инструмента, и причем изгиб или фактическое положение наконечника используют при оптическом сопровождении для коррекции прогнозирования интервенционного инструмента внутри тела. В случае, если во время дальнейшего введения интервенционного инструмента предполагается отклонение изгиба от ранее обнаруженного изгиба или приведение наконечника изгибом в положение, отличающееся от спрогнозированного положения наконечника, то врач может выполнить дополнительное обновление определения деформации интервенционного инструмента или определения фактического положения наконечника, чтобы получить более точное оптическое наведение. Таким образом, на основании фактического изображения можно корректировать относительное расположение в пространстве между внешней частью интервенционного инструмента, находящейся снаружи пациента, в частности, между метками на упомянутой внешней части интервенционного инструмента, и наконечником внутри пациента, при этом тогда оптическое наведение может полагаться на данное скорректированное относительное расположение в пространстве, что повышает точность оптического наведения. Для определения деформации интервенционного инструмента и/или положения наконечника внутри пациента предпочтительно получают два флюороскопических изображения под разными углами.
Интервенционная система может быть выполнена с возможностью совместного выставления блока обеспечения положения инструмента, предпочтительно являющегося системой оптического наведения, блока обеспечения фактического изображения, предпочтительно являющегося флюороскопической системой, и набора данных изображения, являющегося, например, набором данных трехмерного изображения из системы компьютерной томографии, системы магнитно-резонансной томографии или комбинированной системы визуализации методами позитронно-эмиссионной томографии и компьютерной томографии. Траектория, по которой интервенционный инструмент следует вводить в пациента, и/или представляющее интерес местоположение, в которое следует провести интервенционный инструмент, могут быть определены в обеспеченном наборе данных изображения. В частности, пользователь может указать траекторию и/или представляющее интерес местоположение в наборе данных изображения, которые могут быть показаны на блоке 19 отображения с использованием, например, графического пользовательского интерфейса и средства ввода, подобного клавиатуре или мыши. Интервенционная система может также содержать блок определения траектории и/или представляющего интерес местоположения для автоматического определения траектории и/или представляющего интерес местоположения. Тогда пользователь может направлять интервенционный инструмент по установленной траектории и/или к представляющему интерес местоположению с использованием блока определения положения инструмента, предпочтительно являющегося системой оптического наведения, при этом определение положения интервенционного инструмента внутри пациента основано на видимой второй части интервенционного инструмента снаружи тела. В таком случае, фактическое изображение, предпочтительно являющееся флюороскопическим изображением частично введенного интервенционного инструмента, можно получать и можно использовать для определения изгиба первой части внутри тела и/или положения дистального наконечника внутри тела. Затем информацию об изгибе и/или информацию о фактическом положении дистального наконечника интервенционного инструмента можно использовать для коррекции оптического наведения интервенционного инструмента. После этого дальнейшее наведение интервенционного инструмента к искомому местоположению внутри тела можно выполнять на основе скорректированного оптического наведения, которое использует скорректированное относительное расположение в пространстве между видимой внешней второй частью интервенционного инструмента и внутренней первой частью интервенционного инструмента.
Интервенционный инструмент можно выставить по отношению к блоку обеспечения положения инструмента, предпочтительно являющемуся оптической системой сопровождения, посредством размещения наконечника интервенционного инструмента относительно известной базовой точки и посредством измерения местоположения меток на второй части интервенционного инструмента относительно базовой точки. Вследствие отклонения или изгиба интервенционного инструмента во время использования, местоположение наконечника может отличаться от положения калибровки настолько, что в известных интервенционных системах сопровождение может быть неточным. Однако, при использовании интервенционной системы, описанной выше со ссылкой на фиг. 1, положение наконечника внутри пациента можно определять точно, даже если интервенционный инструмент отклонен или изогнут.
В частности, после того, как интервенционный инструмент откалиброван врачом посредством размещения наконечника интервенционного инструмента в известной базовой точке, можно определить заданное местоположение внутри пациента. Затем интервенционный инструмент можно частично ввести в пациента, при этом положение наконечника интервенционного инструмента можно определять на основании установленного положения внешней второй части интервенционного инструмента и первоначального относительного расположения в пространстве между второй частью снаружи пациента, в частности, меток второй части снаружи пациента, и наконечником интервенционного инструмента, которое установлено калибровкой устройства для определения положения. Затем можно получать фактическое изображение, т.е. предпочтительно флюороскопическое изображение, при этом флюороскопическое изображение представляет наконечник интервенционного инструмента. Двумерное местоположение наконечника интервенционного инструмента в фактическом изображении можно определять либо вручную, либо автоматически посредством алгоритмов машинного зрения и можно преобразовывать в трехмерную опорную систему координат путем сочетания ориентаций блока обеспечения фактического изображения, в частности, флюороскопической системы, и сопровождаемого интервенционного инструмента. Обе ориентации могут быть обеспечения блоком обеспечения положения инструмента, в частности, оптической системой сопровождения, и/или позиционными кодовыми датчиками. Затем, калибровку интервенционного инструмента, т.е. относительное расположение в пространстве, задающее местоположение наконечника интервенционного инструмента относительно меток второй части интервенционного инструмента, можно обновить регулировкой местоположения наконечника перпендикулярно оси блока обеспечения фактического изображения, т.е. регулировкой местоположения наконечника в пределах или параллельно плоскости изображения. Если желательно по меньшей мере одно дополнительное фактическое изображение под другим угловым направлением, в частности, под угловым направлением, перпендикулярным угловому направлению первого фактического изображения, можно использовать для обеспечения полной трехмерной коррекции местоположения наконечника. Затем врач может продолжить интервенционную процедуру, при наведении с помощью устройства для определения положения, в частности, с оптическим наведением, с использованием обновленной калибровки инструмента, т.е. с использованием обновленного относительного расположения в пространстве между метками на второй части интервенционного инструмента и наконечником интервенционного инструмента. Таким образом, в то время, когда врач проводит интервенционный инструмент внутри пациента, блок отображения может представлять установленное положение наконечника интервенционного инструмента внутри пациента в обеспеченном наборе данных трехмерного изображения, предпочтительно являющегося набором данных трехмерного компьютерного томографического изображения, при этом определение положения наконечника внутри пациента основано на скорректированном относительном расположении в пространстве. Если желательно, то получение фактического изображения, коррекцию относительного расположения в пространстве по фактическому изображению и, следовательно, коррекцию установленного положения наконечника внутри пациента можно повторять.
Вместо выполнения первоначальной калибровочной процедуры для определения первоначального относительного расположения в пространстве между второй частью, в частности, метками второй части, и наконечником интервенционного инструмента, способ определения положения и интервенционный способ можно выполнять без упомянутой первоначальной калибровки. Например, если интервенционный инструмент является удлиненным инструментом, подобным игле, то блок определения положения может сначала определять приблизительное местоположение наконечника, заданное линией, которая определяется как продолжение второй части интервенционного инструмента снаружи пациента в направлении, установленном блоком обеспечения положения. Интервенционный инструмент можно частично ввести в пациента, а блок отображения может показывать приблизительное местоположение наконечника, т.е. соответствующую линию, в обеспеченном наборе данных изображения, представляющем внутреннюю область пациента. Врач может отметить заданные глубины на интервенционном инструменте и прекратить введение значительно раньше, чем будет достигнуто заданное место.
Если длина интервенционного инструмента внутри пациента не известна, то без использования фактического изображения интервенционного инструмента внутри пациента, блок определения положения может определять только приблизительное местоположение наконечника, задаваемое линией продолжения, но не точное положение наконечника интервенционного инструмента. Однако блок определения относительного расположения в пространстве может определять относительное расположение в пространстве между наконечником интервенционного инструмента и метками на второй части интервенционного инструмента на основании установленного положения второй части интервенционного инструмента, в частности, меток на второй части, и фактического изображения, представляющего наконечник интервенционного инструмента. В таком случае, дальнейшее направление действий врача может опираться на установленное относительное расположение в пространстве, т.е. блок определения положения может определять положение наконечника в обеспеченном наборе данных изображения в зависимости от положения второй части интервенционного инструмента и относительного расположения в пространстве между наконечником интервенционного инструмента и второй части, при этом установленное положение наконечника в наборе данных изображения может быть показано на блоке отображения, чтобы обеспечить врачу возможность наведения интервенционного инструмента на основании фактического положения наконечника внутри пациента, показанного в блоке отображения.
В качестве дополнения к устройству для определения положения может выполняться экстраполяция деформации инструмента. Некоторые интервенционные инструменты, подобные игле, с асимметричным наконечником имеют тенденцию сдвигаться в одном направлении. Кривизну иглы можно получить из по меньшей мере одного фактического изображения и использовать для прогнозирования количества и направления сдвига. По мере введения иглы, прогнозируемое местоположение наконечника может обновляться в зависимости от сдвига и длины введения. При обновлении прогнозируемого местоположения наконечника, относительное расположение в пространстве между наконечником интервенционного инструмента и второй частью интервенционного инструмента обновляется, при этом обновленное относительное расположение в пространстве можно использовать для определения положения наконечника интервенционного инструмента, а интервенционный инструмент проводят дальше в искомое местоположение.
Интервенционная система может содержать блок предупреждения обеспечения предупреждения, если установленное положение первой части интервенционного инструмента отклоняется от запланированной траектории.
Хотя в вышеописанных вариантах осуществления блок обеспечения положения инструмента содержит оптическую систему сопровождения, использующую две камеры, в других вариантах осуществления блок обеспечения положения инструмента может также содержать другую оптическую или неоптическую систему сопровождения, подобную упомянутой системе оптического измерения формы, электромагнитным системам сопровождения, шарнирным консолям, радиочастотным системам сопровождения и т.д.
Интервенционную систему и устройство для определения положения можно применять во время минимально инвазивных процедур, требующих сопровождения устройства рентгеновскими методами, например, пункционных биопсий, радиочастотных абляций и т.д.
Другие изменения раскрытых вариантов осуществления могут быть выявлены и внедрены специалистами в данной области техники в процессе применения заявленного изобретения, на основании изучения чертежей, описания и прилагаемой формулы изобретения.
В формуле изобретения, выражение «содержащий» не исключает других элементов или этапов, и признак единственного числа в форме неопределенного артикля не исключает множественного числа.
Единственный блок или устройство могут выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки перечислены во взаимно различных зависимых пунктах формулы изобретения не означает, что в подходящем случае нельзя применить сочетание упомянутых признаков.
Определения, подобные определению относительного расположения в пространстве и определению положения первой части внутри субъекта, выполняемые по меньшей мере одним блоком или устройством, могут выполняться любым другим числом блоков или устройств. Например, этапы 105 и 106 могут выполняться единственным блоком или любым другим числом разных блоков. Определения и/или управление интервенционной системой в соответствии с интервенционным способом и/или управлением устройством для определения положения в соответствии со способом определения положения могут быть реализованы в виде программного кодового средства компьютерной программы и/или в виде специализированного аппаратного обеспечения.
Компьютерная программа может храниться/поставляться на подходящем носителе, например, оптическом носителе данных или полупроводниковом носителе, поставляемом совместно или в составе другого аппаратного обеспечения, но может также поставляться в других формах, например, по сети Internet или в других проводных или беспроводных телекоммуникационных системах.
Никакие ссылочные позиции в формуле изобретения нельзя истолковывать как ограничивающие объем.
Изобретение относится к устройству для определения положения для определения положения интервенционного инструмента внутри субъекта. Относительное расположение в пространстве между положениями второй части интервенционного инструмента снаружи субъекта и первой части интервенционного инструмента внутри субъекта определяется по фактическому изображению интервенционного инструмента внутри субъекта, предпочтительно являющемуся рентгеновским изображением, и обеспеченному положению второй части. После того, как относительное расположение в пространстве определено, можно определить положение интервенционного инструмента внутри субъекта, а интервенционный инструмент перемещают внутри субъекта на основании установленного относительного расположения в пространстве и установленного фактического положения второй части снаружи субъекта, без необходимости получения дополнительного фактического изображения. Приведенный подход может допускать уменьшение дозы облучения, если для получения фактического изображения используют рентгеновское излучение.
Формирование многоспектральных изображений
Система оптического зонда с повышенной скоростью сканирования
Алгоритм для консоли фотонной иглы
Система микроскопии с ослаблением стимулированного излучения
Визуализация физиологических параметров
Вытяжная решетка
Система и способ для отслеживания точки взгляда наблюдателя
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Формирование многоспектральных изображений
Система оптического зонда с повышенной скоростью сканирования
Алгоритм для консоли фотонной иглы
Система микроскопии с ослаблением стимулированного излучения
Визуализация физиологических параметров
Вытяжная решетка
Система и способ для отслеживания точки взгляда наблюдателя
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод

