Результат интеллектуальной деятельности: ОДНОВРЕМЕННОЕ УЛЬТРАЗВУКОВОЕ НАБЛЮДЕНИЕ ТРЕХМЕРНОГО ОБЪЕМА С МНОЖЕСТВА НАПРАВЛЕНИЙ
Вид РИД
Изобретение
Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к системам ультразвуковой визуализации, которые отображают трехмерный объем в одновременных видах с множества направлений.
Системы ультразвуковой диагностической визуализации традиционно используют для того, чтобы визуализировать плоскость тела в реальном времени. Зонд с преобразователем с одномерным (1D) массивом или механически заметающим преобразователем с одним элементом можно приводить в действие для того, чтобы повторно сканировать плоскость тела для того, чтобы получать последовательности изображений в реальном времени для отображения анатомических структур вживую. В последнее время разработаны преобразователи с двухмерными (2D) массивами и механически заметающие 1D массивы для сканирования объемной области тела. Такие зонды можно использовать для того, чтобы получать трехмерные (3D) изображения сканируемого объема, также в реальном времени. Способ отображения, широко используемый для трехмерного отображения сканируемых ультразвуком объемов, называют кинетическим параллаксом, в котором набор трехмерных данных об объеме воспроизводят из серии различных направлений наблюдения. Когда оператор перемещает средство управления на ультразвуковой системе для того, чтобы изменить направление наблюдения, воспроизводящий объем процессор воспроизводит объем во вновь выбранном направлении наблюдения и движение в различных направлениях дает видимость движения трехмерного объема на экране дисплея. Отдельные плоскости можно выбирать из набора трехмерных данных для наблюдения, способ известен как многопланарная реконструкция (MPR).
Это происходит в моменты, когда желательно наблюдать интересующую объемную область (ROI) с различных направлений. При использовании стандартного средства наблюдения это следует выполнять посредством наблюдения ROI с одного направления, затем поворачивать или вращать трехмерную ROI таким образом, чтобы ее можно было видеть со второго направления. Сравнение двух видов следует выполнять посредством запоминания того, чтобы было видно на первом виде, затем перемещения вида во второе направление и выполнять сравнение на основе воспоминания о первом виде. Для сравнения тонких анатомических различий предпочтительно не полагаться на запоминание или перемещение видов назад и вперед в попытке поставить диагноз. Предпочтительно иметь возможность видеть оба вида одновременно с тем, чтобы клиницист смотрел на оба вида одновременно, при этом ставя диагноз.
В соответствии с принципами настоящего изобретения, описан диагностическая ультразвуковая система, которая позволяет клиницисту наблюдать объем с множества внешних перспектив наблюдения одновременно. Когда клиницист манипулирует одним видом, манипуляцию применяют ко второму виду с тем, чтобы оба вида менялись синхронно, поскольку клиницист будет ожидать изменения видов, если оба изменены аналогичным образом. Любой или оба вида также можно детально исследовать посредством MPR наблюдения. Систему по настоящему изобретению, в частности, можно использовать для того, чтобы направлять инвазивное устройство, такое как игла или катетер, внутрь тела.
НА ЧЕРТЕЖАХ:
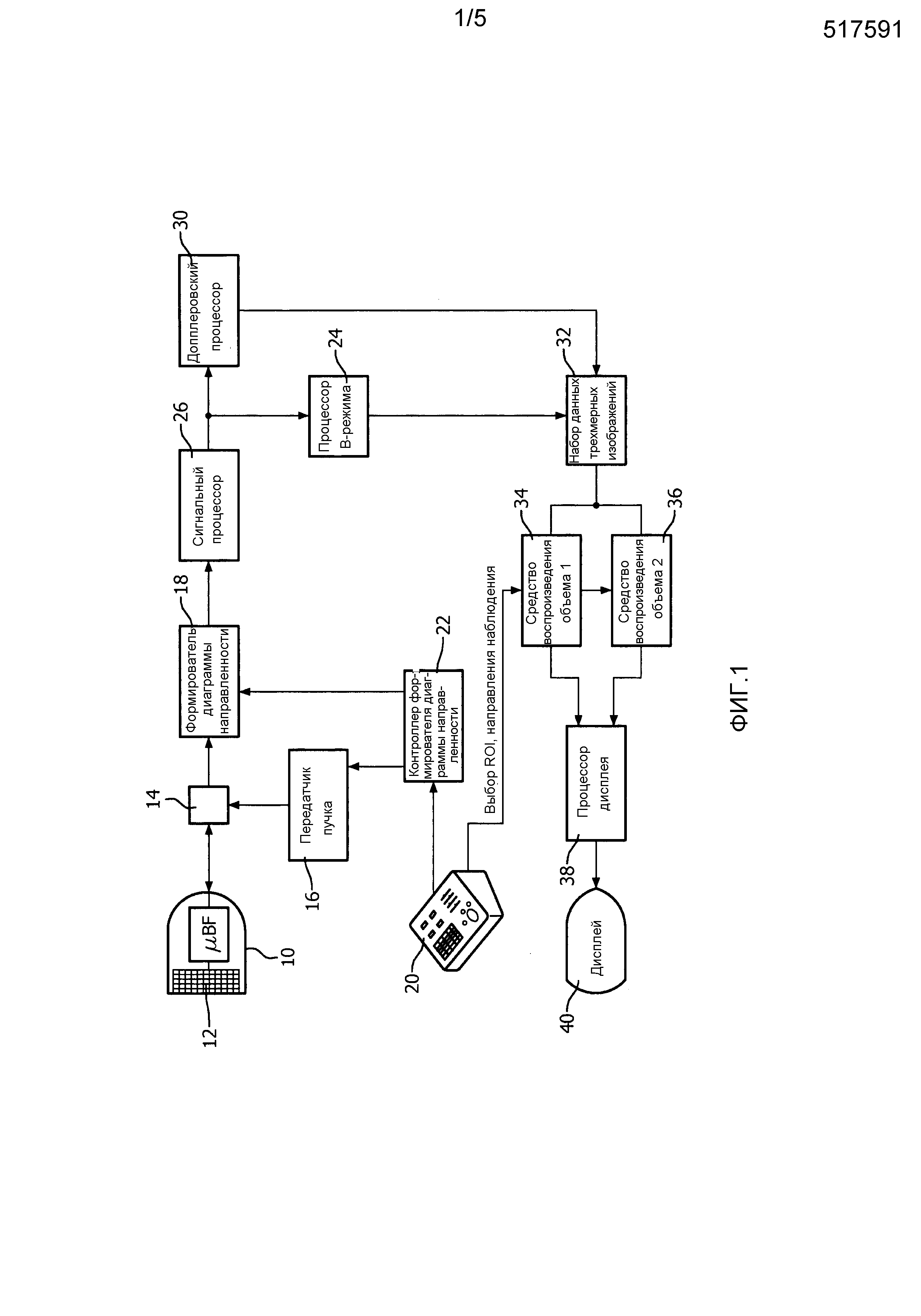
На фиг. 1 в форме блок-схемы проиллюстрирована система ультразвуковой диагностической визуализации, сконструированная в соответствии с принципами настоящего изобретения.
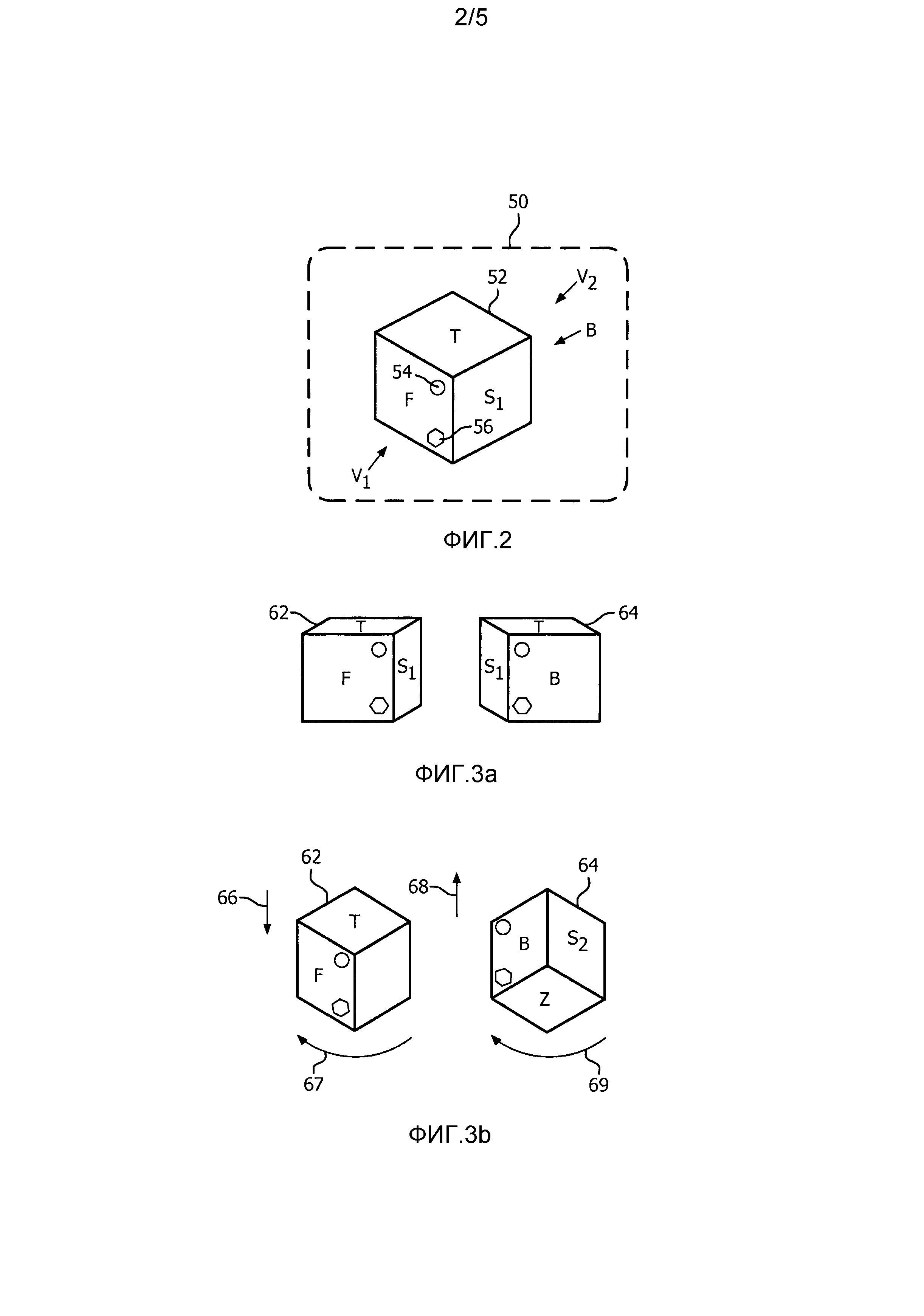
На фиг. 2 представлена кубическая ROI и две различных ориентации наблюдения.
На фиг. 3a-3d проиллюстрированы одновременные изменения двух ориентаций наблюдения кубической ROI с фиг. 2 посредством манипуляции одним из видов.
На фиг. 4 проиллюстрированы два одновременных вида кубической ROI с фиг. 2 с ортогональных ориентаций наблюдения.
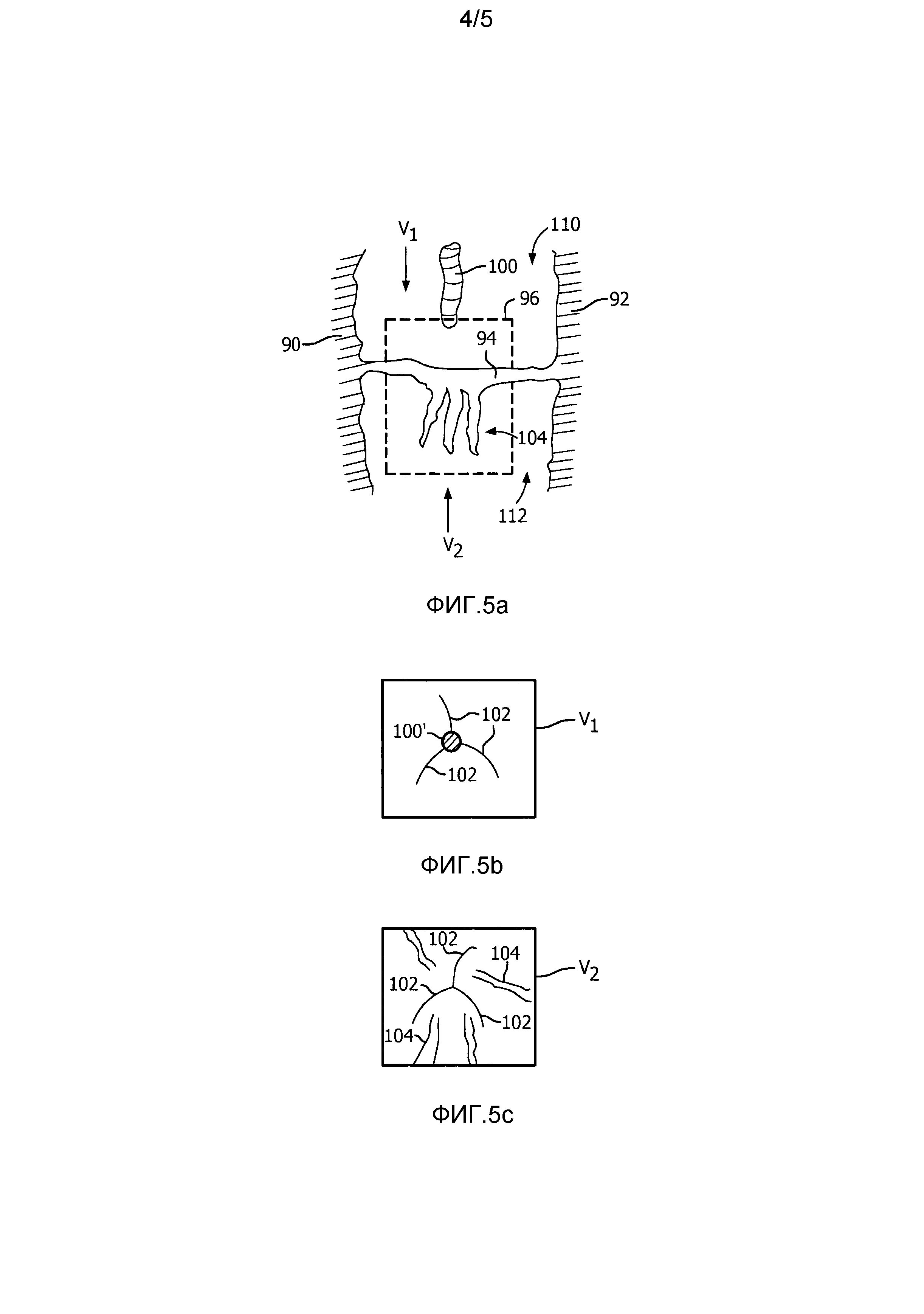
На фиг. 5а-5с проиллюстрированы одновременные виды с различных направлений объемной ROI, которая содержит клапан сердца.
На фиг. 6а-6с проиллюстрированы одновременные виды процедуры катетеризации с ортогональных направлений наблюдения.
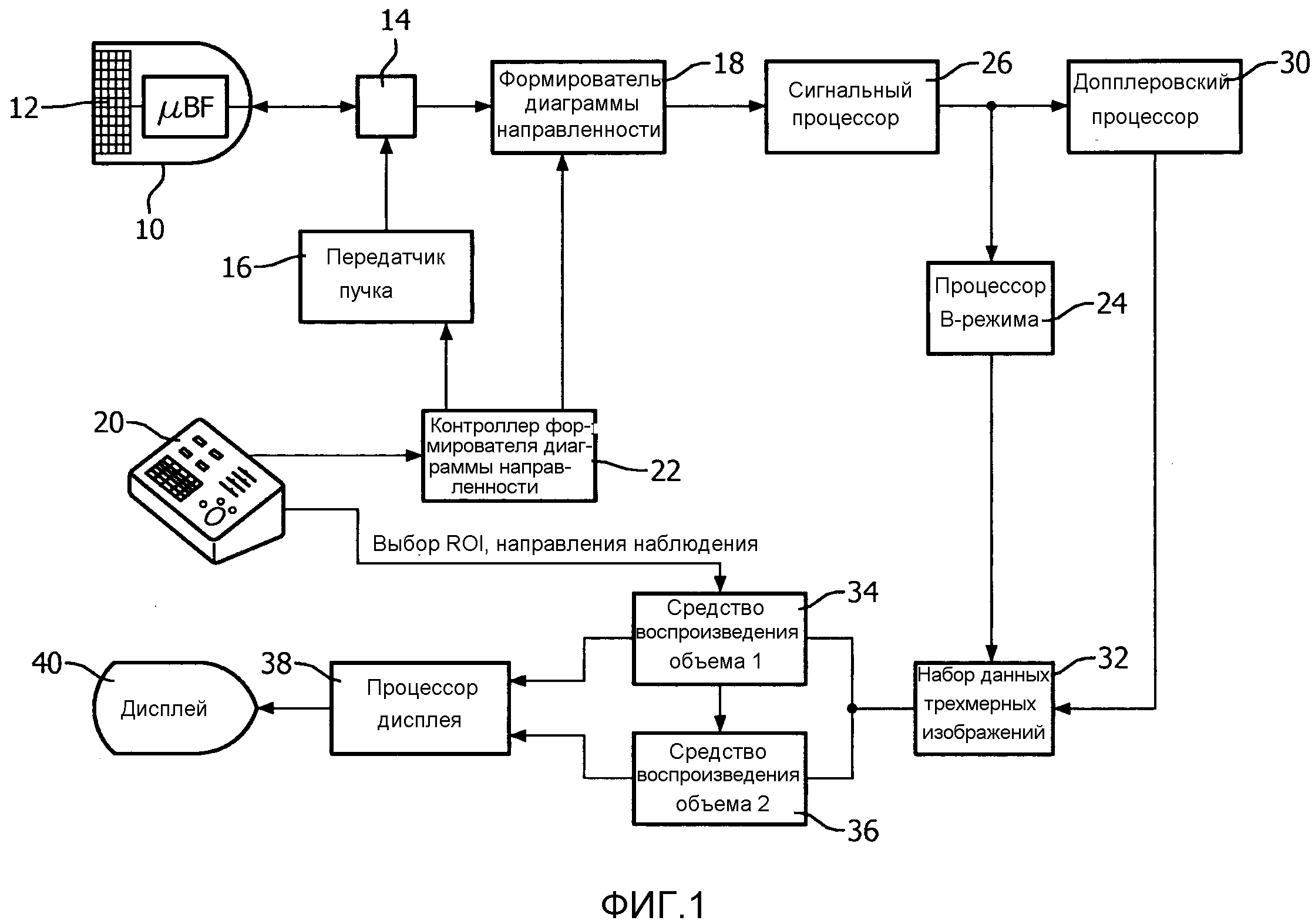
Сначала, со ссылкой на фиг. 1, система ультразвуковой диагностической визуализации, сконструированная в соответствии с принципами настоящего изобретения, представлена в форме блок-схемы. Ультразвуковой зонд 10, способный к трехмерной визуализации, содержит преобразователь 12 с двухмерным массивом, который передает электронно направляемые и фокусируемые пучки через объемную область и принимает отдельные или множественные принимаемые пучки в ответ на каждый передаваемый пучок. Группы смежных элементов преобразователя, обозначаемые как «лоскуты» или «подмассивы», как единое целое приводит в действие микроформирователь диаграммы направленности (μBF) в зонде 12, который осуществляет частичное формирование диаграммы направленности принимаемых эхо-сигналов и тем самым снижает число проводников в кабеле между зондом и основной системой. Подходящие двухмерные массивы описаны в патенте США 6,419,633 (Robinson et al.) и в патенте США 6,368,281 (Solomon et al.). Микроформирователи диаграммы направленности описаны в патентах США 5,997,479 (Savord et al.) и 6,013,032 (Savord). Характеристиками передаваемого пучка массива управляет передатчик 16 пучка, который управляет аподизированными апертурными элементами массива для того, чтобы испускать фокусированный пучок желаемой ширины в желаемом направлении через объемную область тела. Передаваемые импульсы от передатчика 16 пучка соединяют с элементами массива посредством переключателя 14 передачи/приема. Эхо-сигналы, принимаемые элементами массива и микроформирователем диаграммы направленности в ответ на передаваемый пучок, передают в системный формирователь 18 диаграммы направленности, где эхо-сигналы с частично сформированной диаграммой направленности от микроформирователя диаграммы направленности обрабатывают для формирования полностью отдельных принимаемых пучков или множества принимаемых пучков с полностью сформированной диаграммой направленности в ответ на передаваемый пучок. Подходящий формирователь диаграммы направленности для этих целей описан в указанном выше патенте Savord ’032.
Принимаемые пучки, формируемые посредством формирователя 18 диаграммы направленности, передают в сигнальный процессор 26, который осуществляет функции, такие как фильтрация и квадратурная демодуляция. Эхо-сигналы обрабатываемых принимаемых пучков передают в допплеровский процессор 30 и/или процессор 24 В-режима. Допплеровский процессор 30 обрабатывает информацию эхо в сигналы информации о допплеровской мощности или скорости. Для визуализации в В-режиме осуществляют детектирование эхо принимаемых пучков огибающей и сигналы логарифмически сжимают до подходящего динамического диапазона посредством процессора 24 В-режима. Эхо и допплеровские сигналы из сканируемой объемной области обрабатывают для формирования одного или более наборов данных трехмерных изображений, которые хранят в буфере 32 наборов данных трехмерных изображений. Данные трехмерного изображения можно обрабатывать для отображения несколькими путями. Один путь состоит в получении множества двухмерных плоскостей из объема. Это описано в патенте США 6,443,896 (Detmer). Такие плоские изображения объемной области получают посредством многоплоскостного переформатирования, как известно в данной области. В соответствии с настоящим изобретением данные трехмерного изображения также можно воспроизводить для формирования трехмерных отображений в перспективе или с кинетическим параллаксом с помощью средств 34 и 36 воспроизведения объема. Получаемые изображения, которые могут представлять собой В-режим, допплер или и то, и другое, как описано в патенте США 5,720,291 (Schwartz), передают в процессор 38 дисплея, из которого их отображают на дисплее 40 изображений. Пользовательское средство управления контроллера 22 формирователя диаграммы направленности, первое пользовательское средство управления, которое обеспечивает выбор первого и второго направлений наблюдения, в которых интересующая трехмерная область (ROI) подлежит наблюдению, второе пользовательское средство управления, приводимое в действие пользователем для выбора ROI в пределах объемной области, третье пользовательское средство управления, выполненное с возможностью изменения ориентации объемной области, и другие функции ультразвуковой системы обеспечивают через пользовательский интерфейс или панель 20 управления.
Ясное понимание манипуляции одновременными видами трехмерной ROI можно получить, обратившись к фиг. 2-4. На этих рисунках кубическую ROI 52, расположенную в объемной области 50, используют для прозрачности иллюстрации. Как видно на фиг. 2, кубическая ROI 52 имеет переднюю грань F, верхнюю грань Т, боковые грани S1 и S2, и заднюю (В) и нижнюю (Z) грани, последние три не видны на фиг. 2. Трехмерная ROI 52 имеет два прохода, идущих от передней грани к задней грань, один изображен в виде круглого прохода 54, а другой изображен в виде шестиугольного прохода 56. Два направления наблюдения V1 и V2 также представлены на фиг. 2, в которых наблюдают трехмерную ROI спереди F и сзади В, соответственно.
На фиг. 3а-4 представлены одновременные трехмерные виды трехмерной ROI, формируемой посредством одновременной работы средства 1 воспроизведения объема и средства 2 воспроизведения объема в соответствии с принципами настоящего изобретению. Два трехмерных вида отображают клиницисту одновременно на дисплее 40, как проиллюстрировано на этих рисунках. Средство 1 воспроизведения объема воспроизводит трехмерную ROI, рассматриваемую в направлении передней грани F, а средство 2 воспроизведения объема воспроизводит трехмерную ROI, рассматриваемую в направлении задней грани В. Направления наблюдения, используемые для воспроизведения, таким образом, противопоставлены друг другу на 180°. В виде 62 передней грани на фиг. 3а направление наблюдения идет слегка вправо и вверх от передней грани трехмерной ROI с тем, чтобы можно было видеть верхнюю Т и боковую S1 грани. Для вида 64 задней грани направление наблюдения идет слегка влево и вверх от задней грани В с тем, чтобы также можно было видеть боковую S1 и верхнюю Т грани на этом виде. Легкую вариацию относительно точно 180° видов можно использовать, как показано на фиг. 3а, или оба вида могут представлять собой точно противоположные на 180°, как показано на фиг. 4. Как проиллюстрировано на фиг. 3а, проходы 54, 56, идущие через трехмерную ROI, видны на правой стороне передней грани F и на левой стороне задней грани В, как клиницист будет ожидать видеть их.
На фиг. 3b клиницист манипулировал пользовательским средством управления из пользовательского интерфейса, таким как шаровой манипулятор на панели 20 управления, или переназначаемым клавишным средством управления на экране дисплея для того, чтобы вращать трехмерную ROI 62 на левой стороне дисплея слегка влево, как показано стрелкой 67. Клиницист также манипулировал пользовательским средством управления для того, чтобы наклонять трехмерную ROI слегка вниз, как показано стрелкой 66, с тем, чтобы можно было видеть больше верхней грани Т. Когда клиницист манипулирует левой трехмерной ROI 62 таким образом, вид 64 трехмерной ROI справа двигается соответствующим образом, как если бы клиницист манипулировал правым видом для того, чтобы перемещать аналогичным образом. Правый вид 64 сзади трехмерной ROI вращается на то же количество влево, как указано стрелкой 69, и наклоняется вверх на то же количество (стрелка 68), что и наклон левого вида трехмерной ROI, что заставляет нижнюю грань Z стать более видимой. Таким образом, посредством манипуляции одним видом трехмерной ROI, соответствующие корректировки выполняются в другом виде трехмерной ROI. Клиницист имеет чувство перемещения одной трехмерной ROI с использованием корректировок средства управления и видит получаемое изменение в обоих видах спереди и сзади трехмерной ROI, как если бы клиницист смотрел на одну и ту же ROI и ее движение с двух различных видов.
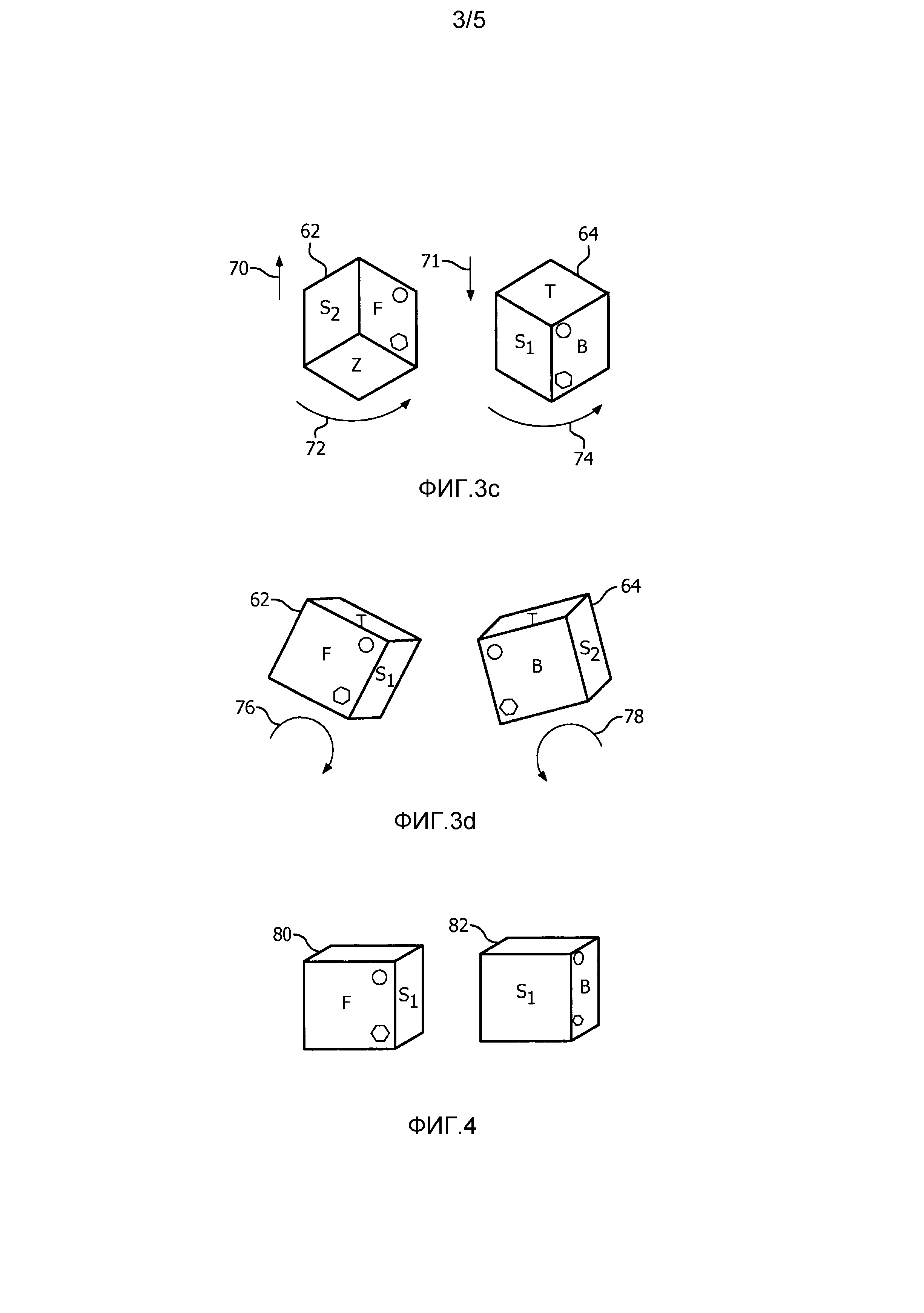
На фиг. 3с проиллюстрированы передний и задний виды 62 и 64 трехмерной ROI после того, как клиницист повернул ROI вправо (как указано стрелками 72 и 74) и наклонил вид ROI спереди вверх (как указано стрелками 70) с тем, чтобы была видна нижняя грань Z. Как показано на рисунке, вид сзади 64 перемещается соответствующим образом. Наклон 70 ROI вверх, как видно спереди, выглядит сзади как наклон вниз, как указано стрелкой 71, что заставляет верхнюю грань Т стать более видимой сзади. Как левый, так и правый виды двигаются синхронно, когда клиницист корректирует ориентацию одного из видов.
На фиг. 3d проиллюстрирован результат вращения левого вида для того, чтобы наклонить правую сторону трехмерной ROI 62 вниз. Когда это происходит, вид трехмерной ROI сзади 64 наклоняется вниз на левой стороне, как указано стрелкой 78. Это представляет собой то, каким клиницист будет ожидать поведение правого вида, когда вращают левый вид: сторона S1 грани наклоняется вниз на обоих видах. Один и тот же результат можно получать, наклоняя правый вид 64 вниз на левой стороне, что вызывает соответствующий эффект наклона правой стороны вида 62 вниз вправо. Таким образом, перемещение ROI на одном из видов вызывает то же движение другого вида, которое видно с другой ориентации наблюдения.
На фиг. 4 представлены два вида трехмерной ROI, причем левый вид 80 смотрит на трехмерную ROI с передней грани F, а правый вид 82 смотрит на трехмерную ROI с боковой грани S1. Как в предыдущих примерах, манипуляция одним из видов трехмерной ROI будет вызывать такое же движение трехмерной ROI на другом виде, но как если смотреть с другой точки наблюдения. Два вида трехмерной ROI, таким образом, могут находиться под углом 180° друг к другу, как показано на фиг. 3a-3d, или под углом 90° друг к другу, как показано на фиг. 4, или под каким-либо другим промежуточным углом между видами, например, между 0° и 180°. Кроме того, система согласно изобретению выполнена с возможностью визуализации инвазивного объекта движущимся в направлении наблюдателя или в направлении от него в первом трехмерном виде, когда им манипулируют в первом направлении по отношению к интересующей анатомической структуре, и с возможностью одновременной визуализации инвазивного объекта движущимся латерально относительно наблюдателя на втором трехмерном виде, когда им манипулируют в первом направлении по отношению к интересующей анатомической структуре.
На фиг. 5а-5с проиллюстрировано клиническое применение ультразвуковой системы по настоящему изобретению. В этом примере катетера 100 проводят в предсердие 110 сердца при подготовке к прохождению через митральный или трехстворчатый клапан 94 и в желудочек 112. Видно, что клапан сердца 94 прикреплен к стенкам 90 и 92 миокарда на противоположных сторонах сердца. От лепестков клапана в желудочке идут сухожильные хорды 104, которые прикрепляют лепестки клапана к сосочковым мышцам в желудочке. Ультразвуковую систему по настоящему изобретению используют для того, чтобы направлять процедуру катетеризации посредством визуализации сердца, как проиллюстрировано на фиг. 5а, и определения трехмерной ROI 96 в пределах такой объемной области. Как проиллюстрировано на фиг. 5а, эта трехмерная ROI расширяется в камеры сердца по обеим сторонам клапана и включает клапан, через который должен быть введен катетер 100. Для трехмерной ROI, определенной таким образом, трехмерную ROI наблюдают одновременно как с поверхности в предсердии 110, так и с поверхности в желудочке, как показано на фиг. 5b и 5с. На виде V1 из предсердия 110, как показано на фиг. 5b, клиницист может видеть катетер 100’, когда он подходит щели 102 между лепестками клапана. На другой стороне клапана на виде V2 с фиг. 5с видны щели 102 лепестков клапанов, через которые скоро появится катетер, и сухожильные хорды 104, идущие назад от лепестков клапана. Посредством наблюдения клапана 94 с обеих сторон в трех измерениях, клиницист может направлять катетер 100 в направлении центра клапана сердца 94 и видеть его введение через клапан сердца, когда катетер появляется на желудочковой стороне клапана 94.
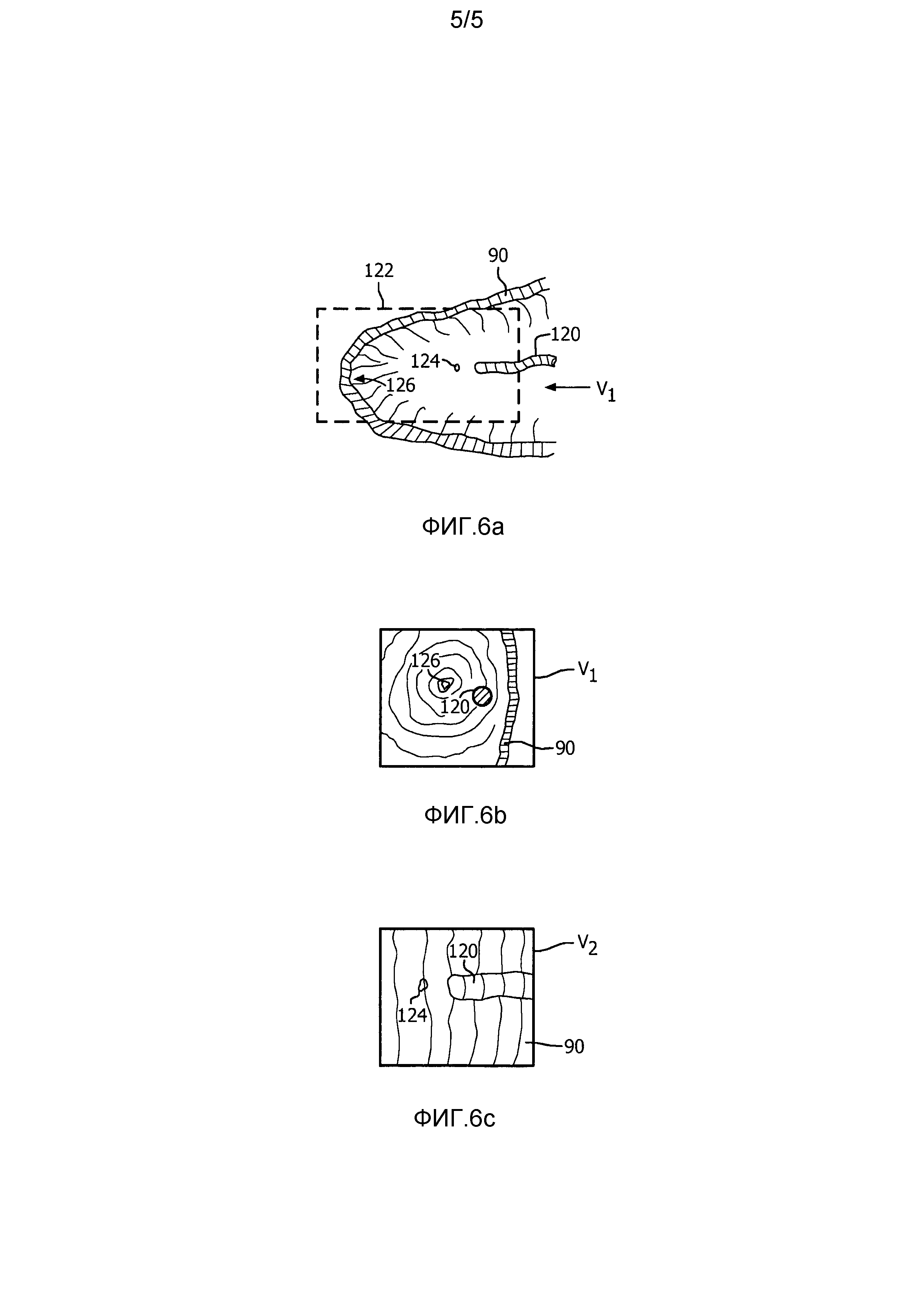
На фиг. 6а-6с проиллюстрирован другой пример клинической процедуры, осуществляемой с использованием ультразвуковой системы по настоящему изобретению. В этом примере трехмерную ROI наблюдают в двух ортогональных направлениях наблюдения V1 и V2. В этом примере катетер 120 направляют для того, чтобы осуществлять клиническую процедуру в пятне 124 на стенке миокарда 90 сердца. Трехмерная ROI очерчена, как показано контуром 122 на фиг. 6а, который содержит катетер 120, пятно 124, которое подлежит лечению, и дальнюю сторону 126 камеры сердца, в которой нужно осуществлять процедуру. Эту трехмерную ROI 122 наблюдают в двух ортогональных направлениях наблюдения, V1, как показано на фиг. 6а, и во втором направлении, смотрящем в плоскость рисунка на фиг. 6а. На фиг. 6b проиллюстрирована трехмерная ROI 122, как наблюдают с направления V1. На этом виде катетер 120 можно видеть аксиально вблизи стенки 90 миокарда и приближающимся к дальнему концу 126 камеры сердца, в которой расположен катетер. Ортогональный вид V2 представлен на фиг. 6с. На этом виде катетер 120 виден приближающимся к точке 124, в которой нужно осуществлять процедуру, и он находится в ориентации, приблизительно параллельной стенке сердца 90. Два ортогональных вида дают клиницисту чувство того, как катетер проходит вдоль стенки сердца, его расстояние до стенки сердца, и насколько дальше катетер нужно продвинуть, чтобы достичь точки 124, в которой нужно осуществлять процедуру.
Катетер-преобразователь с расположенными в шахматном порядке рядами микромашинных ультразвуковых преобразователей
Измерение показателя здоровья с использованием времени восстановления ткани
Визуализация представляющей интерес ткани в данных контрастированного изображения
Устройство для удаления волос
Роботизированное управление эндоскопом на основе анатомических признаков
Устройство для тепловой обработки с фильтрующим элементом
Устройство с чувствительным элементом и способ мониторинга показателя жизнедеятельности субъекта
Способ и устройство для формирования трехмерного изображения
Система для борьбы с биологическим обрастанием
Система защиты человека от рассеянного рентгеновского излучения
Автоматическая сегментация трехплоскостных изображений для ультразвуковой визуализации в реальном времени
Ультразвуковая диагностика работы сердца посредством сегментации камеры с одной степенью свободы
Ультразвуковая диагностика работы сердца с использованием сегментации модели сердечной камеры под контролем пользователя

