Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЛАСТИ
Вид РИД
Изобретение
Данная заявка основана на и претендует на приоритет патентной заявки Китая № 201510726012.7, поданной 30 октября 2015 года и полностью включенной в настоящую заявку посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение в основном относится к области обработки изображений, и более конкретно к способу и устройству для идентификации области.
Уровень техники
Автоматическая идентификация удостоверения личности (идентификационной карты) является технологией для идентификации символьной (текстовой) информации на удостоверении личности путем обработки изображения.
Соответствующая технология обеспечивает способ автоматической идентификации удостоверения личности, который включает в себя сканирование удостоверения личности посредством сканирующего устройства для удостоверения личности при неподвижном относительном расположении для получения сканированного изображения удостоверения личности; осуществление символьного распознавания для символов заданных n областей в сканированном изображении для получения информации о по меньшей мере одном из следующего: имени, поле, национальности, дате рождения, адресе и идентификационном номере гражданина. Однако трудно идентифицировать изображение удостоверения личности, полученное непосредственно путем фотографирования.
Раскрытие изобретения
В свете указанных проблем в соответствующей области техники, в настоящем раскрытии предложены способ и устройство для идентификации области.
В соответствии с первым аспектом настоящего изобретения предложен способ для идентификации области, содержащий: идентификацию заданного края в изображении идентификатора, причем заданный край является краем, расположенным в заданном направлении идентификатора; когда были идентифицированы n предполагаемых заданных краев, определение одного из n предполагаемых заданных краев в качестве целевого заданного края, при этом n≥2; идентификацию по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края.
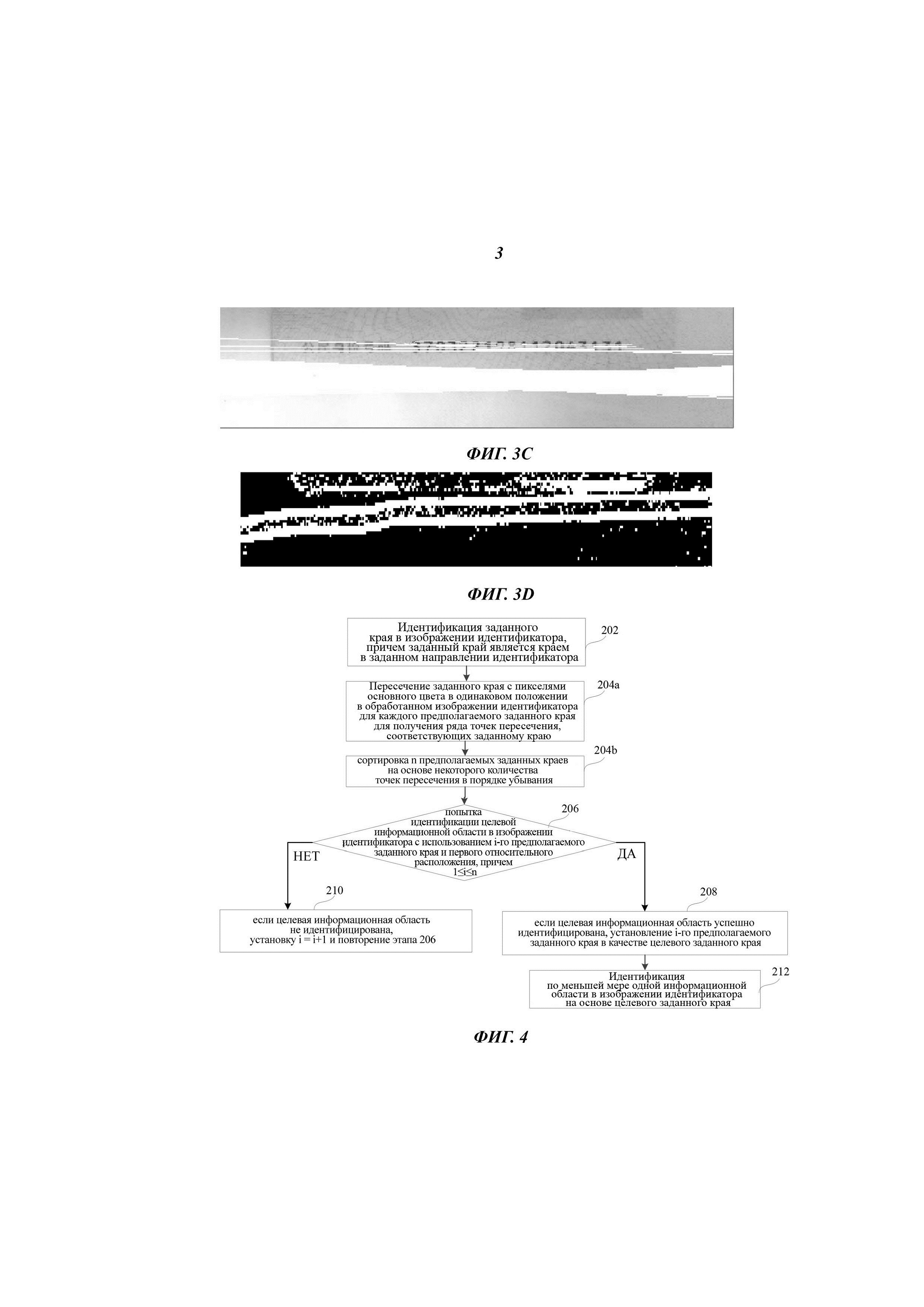
Согласно альтернативному варианту осуществления определение одного из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, содержит: сортировку n предполагаемых заданных краев; попытку идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения, причем 1≤i≤n, и при этом первое относительное расположение является относительным расположением между целевым заданным краем и целевой информационно областью; если целевая информационная область успешно идентифицирована, определение i-го предполагаемого заданного края в качестве целевого заданного края; если целевая информационная область не идентифицирована, задание i=i+1 и повторение этапа попытки идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения.
Согласно альтернативному варианту осуществления сортировка n предполагаемых заданных краев содержит: пересечение заданного края с пикселями основного цвета в одинаковом положении в обработанном изображении идентификатора для каждого предполагаемого заданного края с целью получения ряда соответствующих точек пересечения для заданного края, причем обработанное изображение идентификатора является изображением, подвергнутым фильтрации на горизонтальном фильтре Собеля и бинаризации; сортировку n предполагаемых заданных краев на основе ряда точек пересечения в порядке убывания.
Согласно альтернативному варианту осуществления попытка идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения содержит: обрезку интересующей области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения; идентификацию наличия символьной области, удовлетворяющей заданным характеристикам, в интересующей области, при этом заданные характеристики представляют собой характеристики, которыми обладает символьная область в целевой информационной области.
Согласно альтернативному варианту осуществления идентификация наличия символьной области, удовлетворяющей заданным характеристикам, в интересующей области содержит: бинаризацию интересующей области для получения бинаризованной интересующей области; вычисление первой гистограммы для бинаризованной интересующей области в горизонтальном направлении, причем первая гистограмма содержит вертикальную координату пикселей в каждой строке и количество пикселей основного цвета среди пикселей в каждой строке; вычисление второй гистограммы для бинаризованной интересующей области в вертикальном направлении, причем вторая гистограмма содержит горизонтальную координату пикселей в каждом столбце и количество пикселей основного цвета среди пикселей в каждом столбце; при этом, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, соответствует заданному диапазону высоты, и количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, соответствует заданному количеству, то символьная область, удовлетворяющая заданным характеристикам, успешно идентифицируется в интересующей области; если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, не соответствует заданному диапазону высоты, и количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, не соответствует заданному количеству, то символьная область, удовлетворяющая заданным характеристикам, не идентифицируется в интересующей области.
Согласно альтернативному варианту осуществления идентификация заданного края в изображении идентификатора содержит: фильтрацию изображения идентификатора на горизонтальном фильтре Собеля и бинаризацию изображения идентификатора для получения обработанного изображения идентификатора; выполнение обнаружения линии в заданной области в обработанном изображении идентификатора для получения по меньшей мере одной линии; когда получены n линий, идентификацию n линий в качестве n предполагаемых заданных краев, причем n≥2.
Согласно альтернативному варианту осуществления идентификация по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края содержит определение по меньшей мере одной информационной области на основе целевого заданного края и второго относительного расположения, при этом второе относительное расположение представляет собой относительное расположение между целевым заданным краем и информационной областью.
Согласно второму аспекту настоящего изобретения предлагается устройство для идентификации области, содержащее: модуль идентификации, выполненный с возможностью идентификации заданного края в изображении идентификатора, при этом заданный край является краем, расположенным в заданном направлении идентификатора; модуль определения, выполненный с возможностью определения одного из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, при этом n≥2; модуль идентификации области, выполненный с возможностью идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края.
Согласно альтернативному варианту осуществления модуль определения содержит: первый подмодуль сортировки, выполненный с возможностью сортировки n предполагаемых заданных краев; первый подмодуль идентификации, выполненный с возможностью осуществления попытки идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения, при этом 1≤i≤n, и при этом первое относительное расположение является относительным расположением между целевым заданным краем и целевой информационной областью; второй подмодуль идентификации, выполненный с возможностью определения i-го предполагаемого заданного края в качестве целевого заданного края, если целевая информационная область успешно идентифицирована; третий подмодуль идентификации, выполненный с возможностью задания i=i+1 и возврата к первому подмодулю идентификации, если целевая информационная область не идентифицирована.
Согласно альтернативному варианту осуществления первый подмодуль сортировки содержит подмодуль пересечения, выполненный с возможностью пересечения заданного края с пикселями основного цвета в одинаковом положении в обработанном изображении идентификатора для каждого предполагаемого заданного края с целью получения ряда соответствующих точек пересечения для заданного края, при этом обработанное изображение идентификатора является изображением, подвергнутым фильтрации на горизонтальном фильтре Собеля и бинаризации; второй подмодуль сортировки, выполненный с возможностью сортировки n предполагаемых заданных краев на основе ряда точек пересечения в порядке убывания.
Согласно альтернативному варианту осуществления первый подмодуль идентификации содержит подмодуль обрезки, выполненный с возможностью обрезки интересующей области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения; четвертый подмодуль идентификации, выполненный с возможностью идентификации наличия символьной области, удовлетворяющей заданным характеристикам в интересующей области, при этом заданные характеристики представляют собой характеристики, которыми обладает символьная область в целевой информационной области.
Согласно альтернативному варианту осуществления четвертый подмодуль идентификации содержит подмодуль бинаризации, в интересующей области бинаризации интересующей области для получения бинаризированной интересующей области; первый подмодуль вычисления, в интересующей области вычисления первой гистограммы для бинаризированной интересующей области в горизонтальном направлении, причем первая гистограмма содержит вертикальную координату пикселей в каждой строке и количество пикселей основного цвета среди пикселей в каждой строке; второй подмодуль вычисления, выполненный с возможностью вычисления второй гистограммы для бинаризированной интересующей области в вертикальном направлении, причем вторая гистограмма содержит горизонтальную координату пикселей в каждом столбце и количество пикселей основного цвета среди пикселей в каждом столбце; подмодуль символьной идентификации, выполненный с возможностью успешной идентификации символьной области, удовлетворяющей заданным характеристикам, в интересующей области, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, соответствует заданному диапазону высоты, и количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, соответствует заданному количеству; пятый подмодуль идентификации, выполненный с возможностью отказа от идентификации символьной области, удовлетворяющей заданным характеристикам, в интересующей области, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, не соответствует заданному диапазону высоты, или количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, не соответствует заданному количеству.
Согласно альтернативному варианту осуществления модуль идентификации содержит: подмодуль фильтрации, выполненный с возможностью фильтрации изображения идентификатора на горизонтальном фильтре Собеля и его бинаризации для получения обработанного изображения идентификатора; подмодуль обнаружения, выполненный с возможностью выполнения обнаружения линии в заданной области в обработанном изображении идентификатора для получения по меньшей мере одной линии; подмодуль идентификации края, выполненный с возможностью идентификации n линий в качестве n предполагаемых заданных краев, когда получены n линий, причем n≥2.
Согласно альтернативному варианту осуществления модуль идентификации области выполнен с возможностью определения по меньшей мере одной информационной области на основе целевого заданного края и второго относительного расположения, при этом второе относительное расположение представляет собой относительное расположение между целевым заданным краем и информационной областью.
Согласно третьему аспекту настоящего изобретения предлагается устройство для идентификации области, содержащее процессор; память для хранения инструкций, выполняемых процессором; при этом процессор выполнен с возможностью: идентификации заданного края в изображении идентификатора, при этом заданный края является краем, расположенным в заданном направлении идентификатора; определения одного из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, при этом n≥2; идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края.
Варианты осуществления настоящего изобретения могут обеспечивать по меньшей мере следующие выгодные эффекты: решение проблем в соответствующей области техники, связанных с трудностью идентификации некоторых информационных областей в изображении идентификатора, полученном непосредственно путем фотографирования, а также с неточностью положений некоторых информационных областей. Путем определения целевого заданного края на основе n предполагаемых заданных краев в изображении идентификатора и определения по меньшей мере одной информационной области на основе целевого заданного края может быть точно определено положение информационных областей.
Следует понимать, что вышеприведенное общее раскрытие изобретения и последующее подробное раскрытие изобретения приведены исключительно в качестве примера и не ограничивают сущность настоящего изобретения.
Краткое описание чертежей
Прилагаемые графические материалы, включенные в настоящее описание и составляющие его часть, изображают варианты осуществления настоящего изобретения и совместно с описанием служат для объяснения основных положений настоящего изобретения.
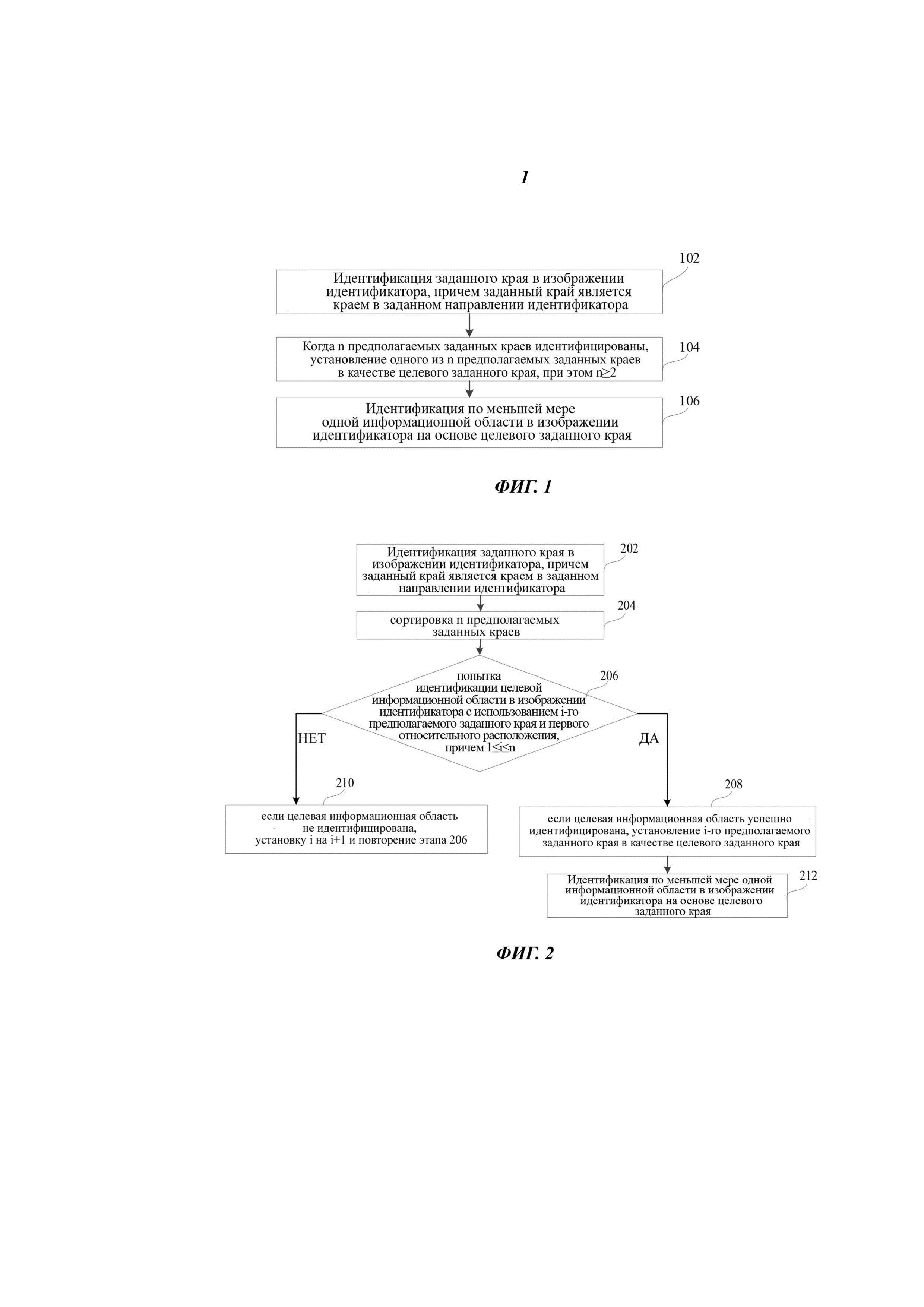
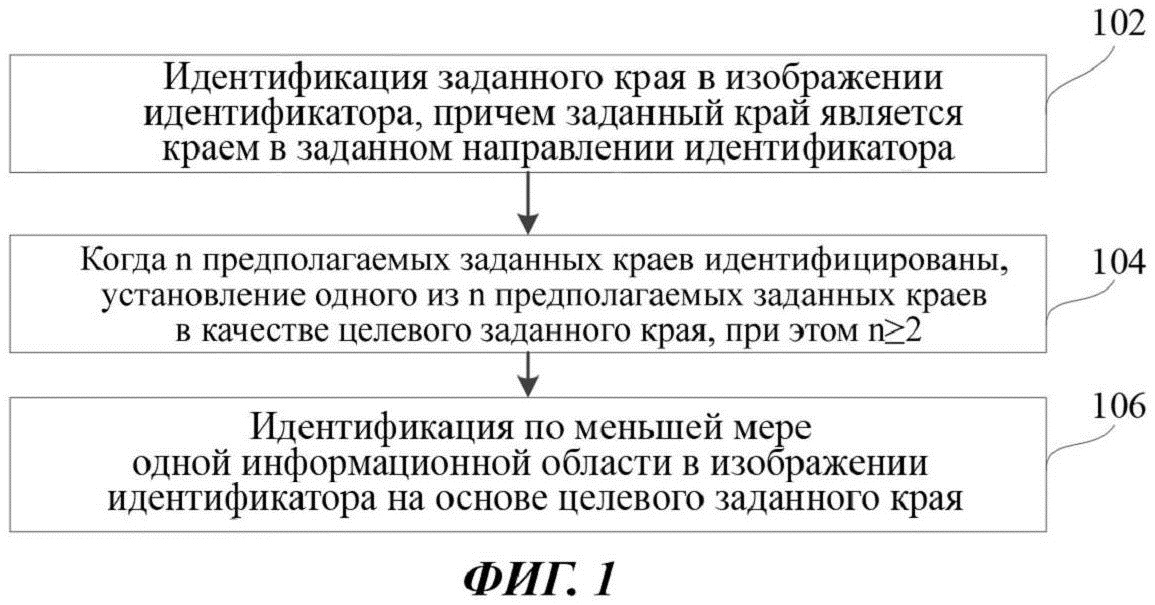
На фиг. 1 представлена блок-схема способа идентификации области согласно одному из примеров осуществления.
На фиг. 2 представлена блок-схема способа идентификации области согласно другому примеру осуществления.
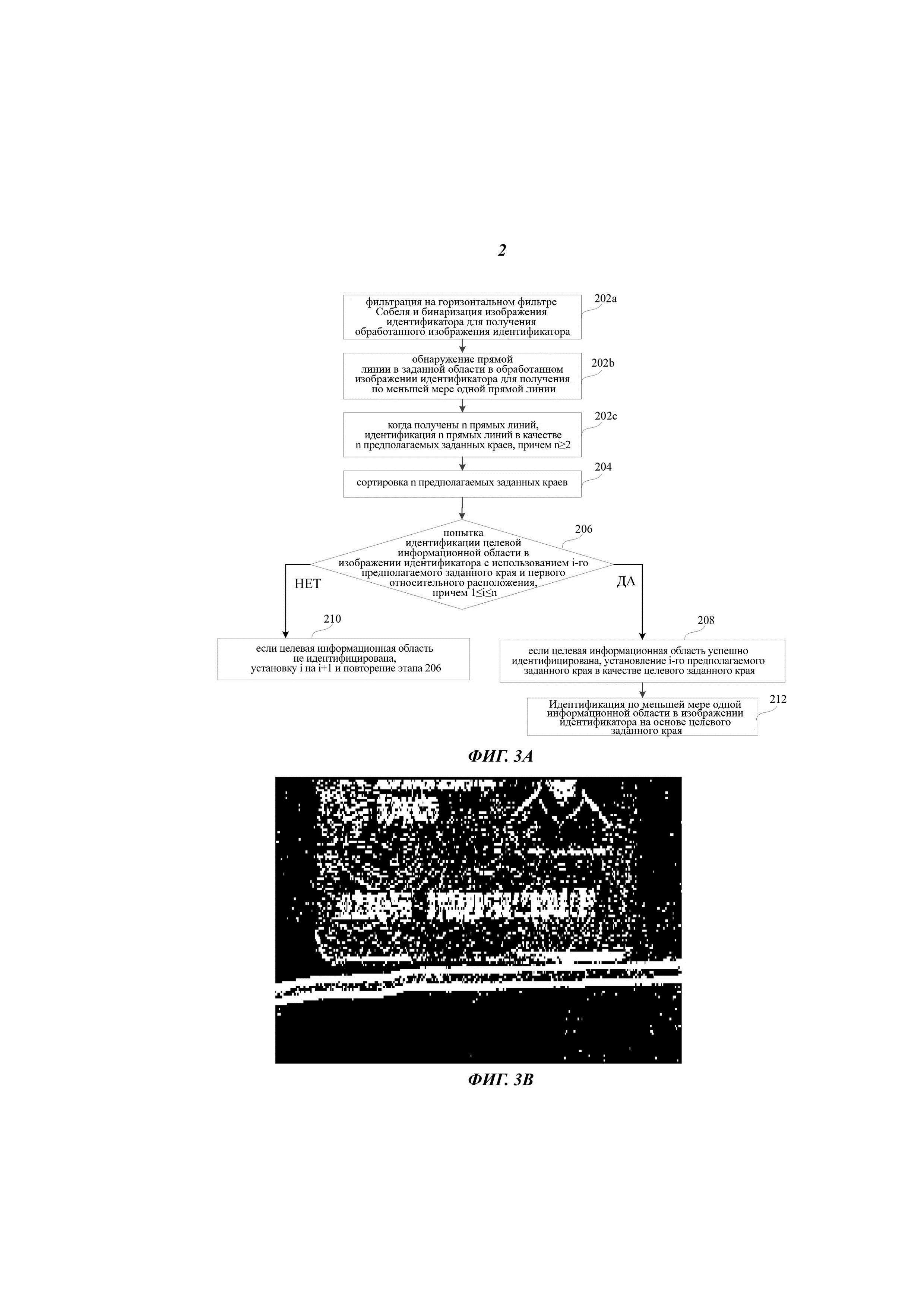
На фиг. 3А представлена блок-схема способа идентификации области согласно другому примеру осуществления.
На фиг. 3В представлена схематическая иллюстрация бинаризации изображения идентификатора согласно одному из примеров осуществления.
На фиг. 3С представлена схематическая иллюстрация обнаружения прямой линии в изображении идентификатора согласно одному из примеров осуществления.
На фиг. 3D представлена схематическая иллюстрация n предполагаемых заданных краев в изображении идентификатора согласно одному из примеров осуществления.
На фиг. 4 представлена блок-схема способа идентификации области согласно другому примеру осуществления.
На фиг. 5А представлена блок-схема способа идентификации области согласно другому примеру осуществления.
На фиг. 5В представлена схематическая иллюстрация определения целевой информационной области согласно одному из примеров осуществления.
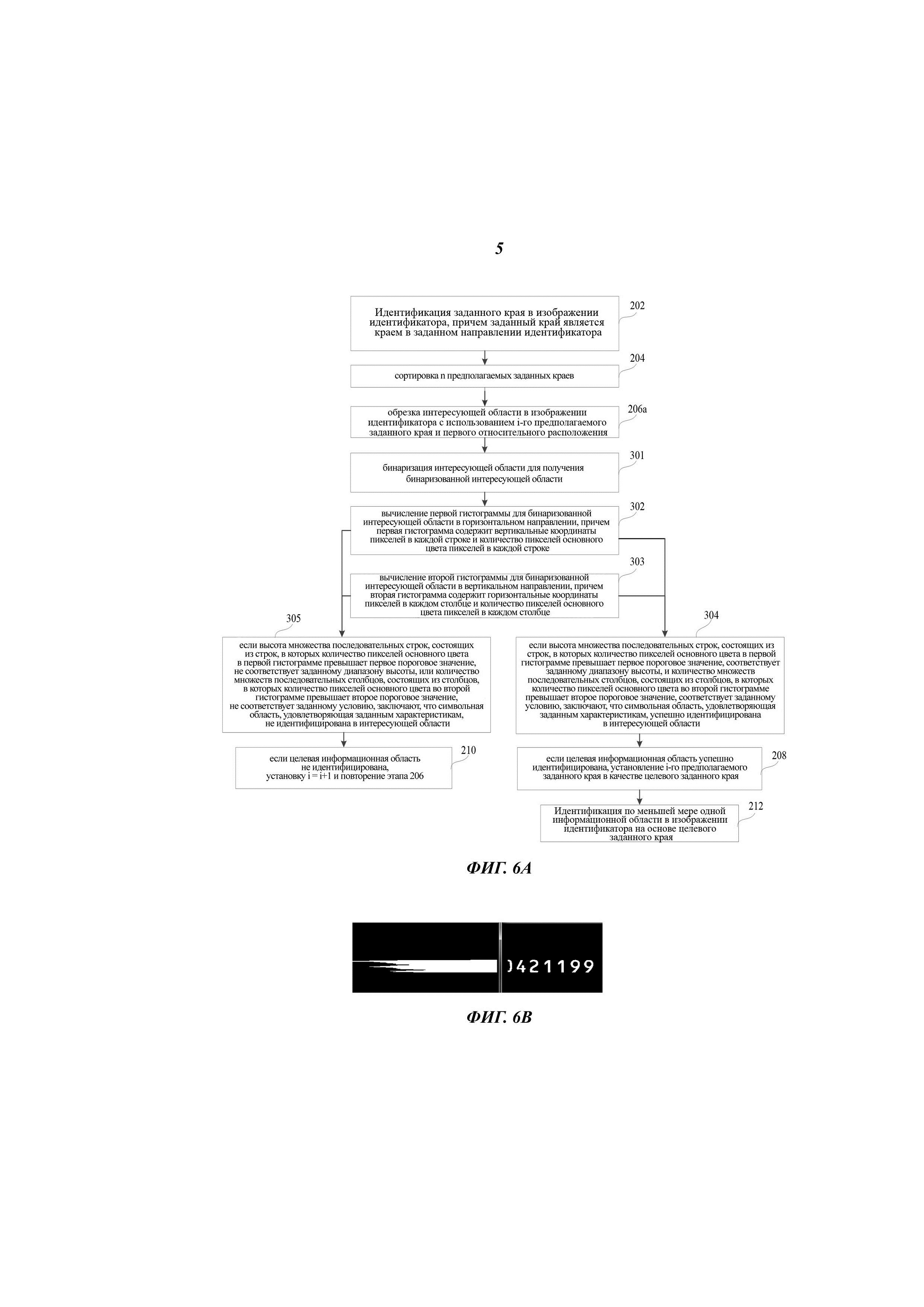
На фиг. 6А представлена блок-схема способа идентификации области согласно другому примеру осуществления.
На фиг. 6В представлено схематическая иллюстрация вычисления первой гистограммы в горизонтальном направлении согласно одному из примеров осуществления.
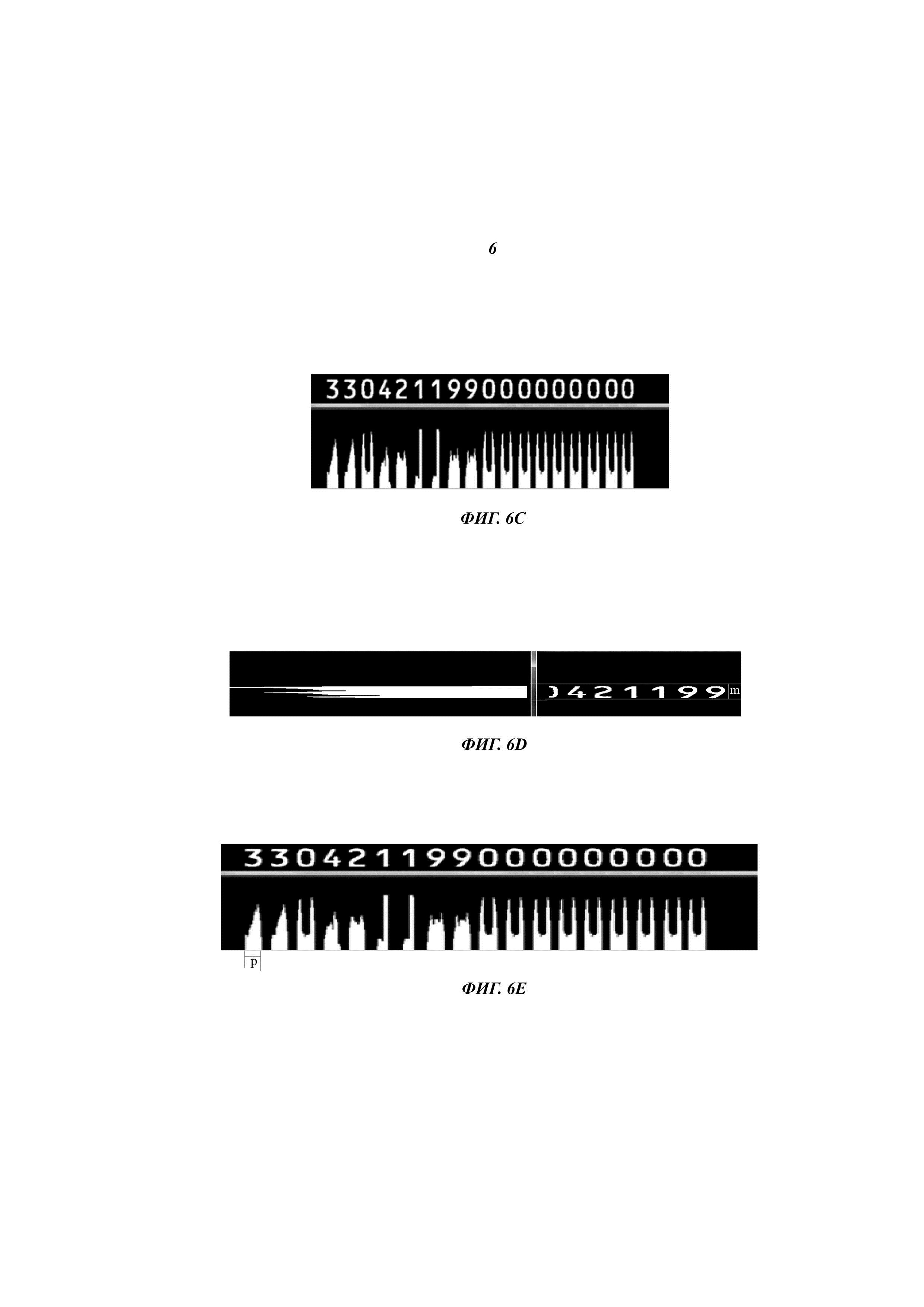
На фиг. 6С представлена схематическая иллюстрация вычисления второй гистограммы в вертикальном направлении согласно одному из примеров осуществления.
На фиг. 6D представлена схематическая иллюстрация множества последовательных строк согласно одному из примеров осуществления.
На фиг. 6Е представлена схематическая иллюстрация множества последовательных столбцов согласно одному из примеров осуществления.
На фиг. 7 представлена блок-схема способа идентификации области согласно другому примеру осуществления.
На фиг. 8 представлена структурная схема устройства для идентификации области согласно одному из примеров осуществления.
На фиг. 9 представлена структурная схема устройства для идентификации области согласно другому примеру осуществления.
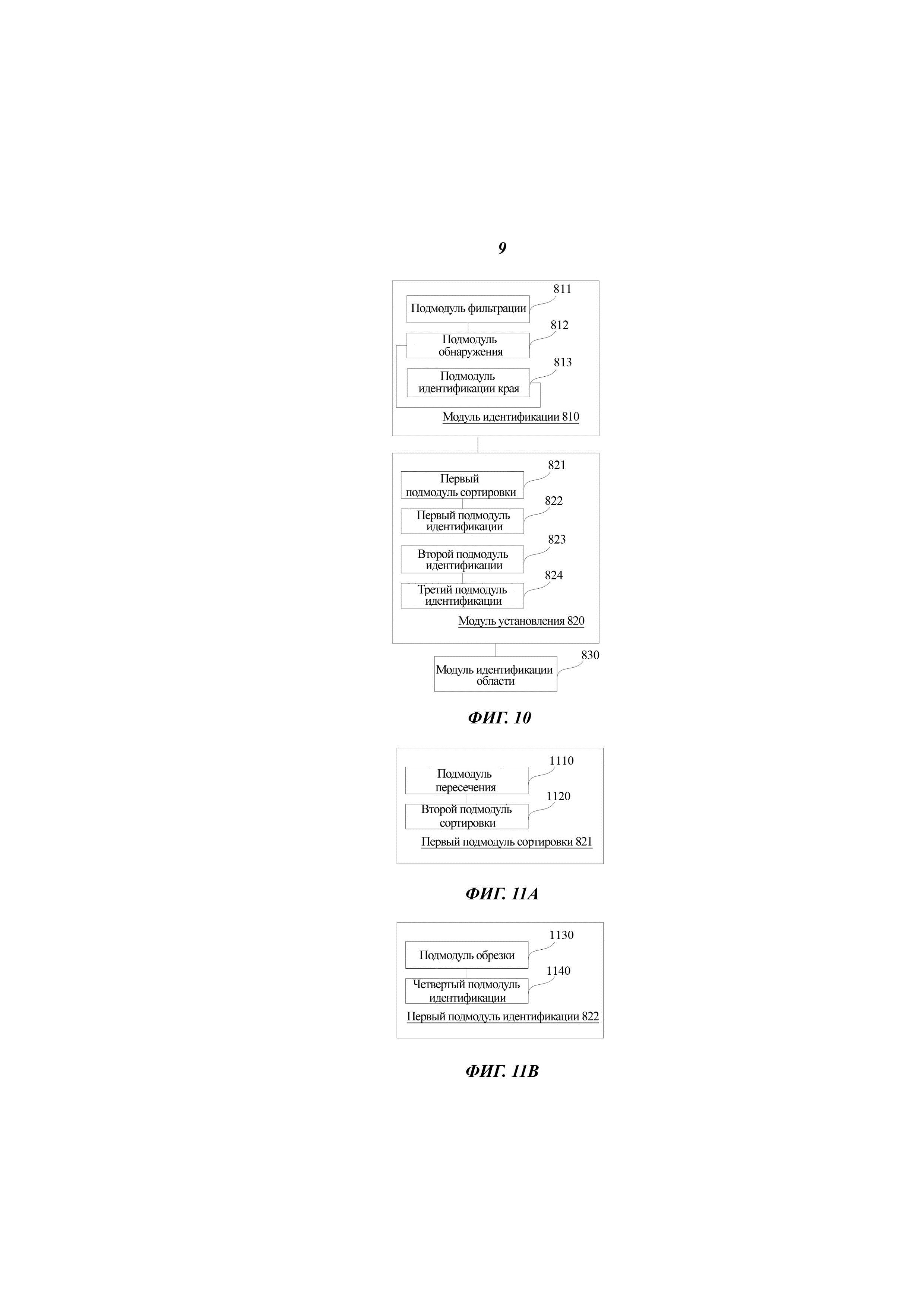
На фиг. 10 представлена структурная схема устройства для идентификации области согласно другому примеру осуществления.
На фиг. 11А представлена структурная схема первого подмодуля сортировки устройства для идентификации области согласно одному из примеров осуществления.
На фиг. 11В представлена структурная схема первого подмодуля идентификации устройства для идентификации области согласно одному из примеров осуществления.
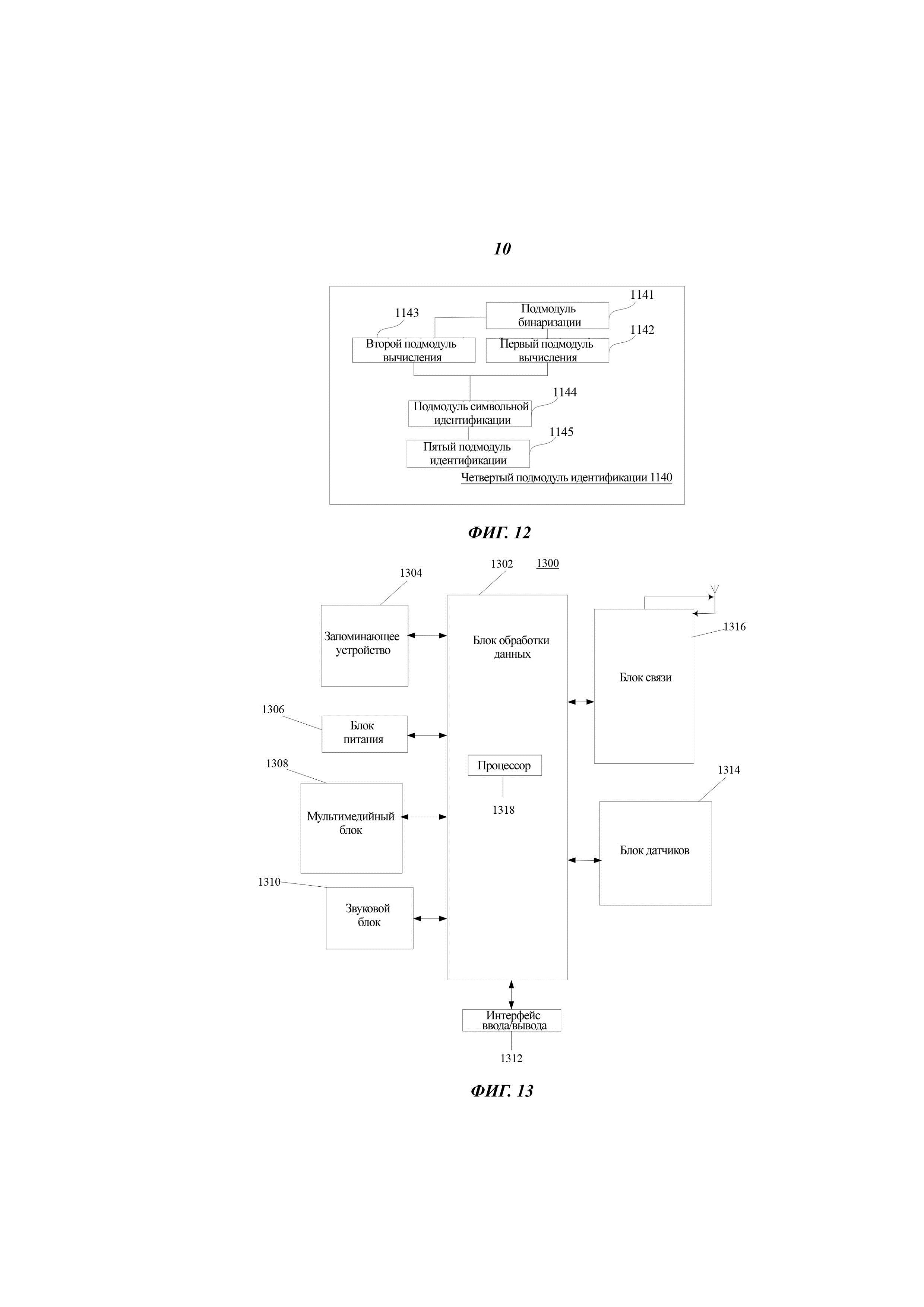
На фиг. 12 представлена структурная схема четвертого подмодуля идентификации устройства для идентификации области согласно одному из примеров осуществления.
На фиг. 13 представлена структурная схема устройства для идентификации области согласно одному из примеров осуществления.
Осуществление изобретения
Далее рассмотрены подробно варианты осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Нижеследующее раскрытие ссылается на прилагаемые чертежи, причем одинаковые номера позиций обозначают одинаковые или подобные элементы, если не указано обратное. Варианты осуществления, изложенные в нижеследующем раскрытии примеров осуществления не представляют всех вариантов осуществления, согласующихся с настоящим изобретением. Напротив, они служат только примерами устройств и способов, согласующихся с аспектами настоящего изобретения, изложенными в прилагаемой формуле изобретения.
На фиг. 1 представлена блок-схема способа идентификации области согласно одному из примеров осуществления. Как показано на фиг. 1, способ идентификации области может содержать следующие этапы.
На этапе 102 идентифицируют заданный край в изображении идентификатора, при этом заданный край представляет собой край в заданном направлении идентификатора.
Изображение идентификатора может представлять собой изображение, полученное непосредственно путем фотографирования идентификатора, такое как изображение удостоверения личности (идентификационной карты), изображение карточки социального страхования и т.п.
Заданный край может являться любым из следующего: верхним краем, нижним краем, левым краем, правым краем идентификатора. В вариантах осуществления настоящего изобретения в качестве примера взят нижний край, а ситуации, в которых заданный край является верхним краем, левым краем или правым краем, не рассматриваются.
На этапе 104, когда были идентифицированы n предполагаемых заданных краев, определяют один из n предполагаемых заданных краев в качестве целевого заданного края, при этом n≥2.
Поскольку результат фотографирования изображения идентификатора находится под влиянием множества факторов, таких как угол фотографирования, фон, условия освещения и параметры фотографирования, при идентификации заданного края может быть идентифицировано более одного заданного края (т.е. n предполагаемых заданных краев).
При n≥2 один из n предполагаемых заданных краев определяют в качестве целевого заданного края идентификатора в изображении идентификатора.
Целевой заданный край может рассматриваться в качестве реального заданного края, истинного заданного края или заданного края с высокой точностью.
На этапе 106 на основе целевого заданного края идентифицируют по меньшей мере одну информационную область в изображении идентификатора.
Положение целевого заданного края в изображении идентификатора относительно неподвижно; таким образом, в изображении идентификатора могут быть определены соответствующие информационные области идентификатора на основе целевого заданного края.
Информационная область относится к области, несущей символьную информацию в изображении идентификатора, такую как по меньшей мере одно из следующего: информационная область имени, информационная область даты рождения, информационная область пола, информационная область адреса, информационная область идентификационного номера гражданина, информационная область порядкового номера, информационная область организации, выдавшей идентификатор, информационная область срока действия и т.п.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия, осуществляют идентификацию заданного края в изображении идентификатора, при этом заданный край является краем, расположенным в заданном направлении идентификатора; определяют один из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, при этом n≥2; осуществляют идентификацию по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края. Это может решить проблемы в соответствующей области техники, такие как трудность идентификации некоторых информационных областей в изображении идентификатора, полученном непосредственно с помощью фотографирования, а также неточность положений некоторых информационных областей. Путем определения целевого заданного края на основе n предполагаемых заданных краев в изображении идентификатора и определения по меньшей мере одной информационной области на основе целевого заданного края, можно точно определить местоположение информационных областей.
На фиг. 2 представлена блок-схема способа идентификации области согласно другому примеру осуществления. Как показано на фиг. 2, способ идентификации области может содержать следующие этапы.
На этапе 202 идентифицируют заданный край в изображении идентификатора, при этом заданный край является краем в заданном направлении идентификатора.
Опционально при фотографировании идентификатора в интерфейсе фотографирования может быть обеспечен прямоугольный участок для наведения фотографирования. Пользователь может сфотографировать идентификатор для получения изображения идентификатора при совмещении прямоугольного участка с идентификатором.
Опционально заданный край идентификатора в изображении идентификатора может быть идентифицирован посредством технологии обнаружения прямой линии на основе полученного посредством фотографирования изображения идентификатора.
Когда в изображении идентификатора идентифицирован только один заданный край посредством технологии обнаружения прямой линии, идентифицированный заданный край определяют в качестве целевого заданного края идентификатора в изображении идентификатора, и способ переходит на этап 212.
Когда посредством технологии обнаружения прямой линии в изображении идентификатора идентифицированы n (предполагаемых) заданных краев идентификатора вследствие таких факторов, как угол фотографирования, фон, условия освещения и параметры фотографирования, способ переходит на этапы 204–210 для обработки n предполагаемых заданных краев, причем n≥2.
На этапе 204 сортируют n предполагаемых заданных краев.
После получения n предполагаемых заданных краев могут быть отсортированы на основе вероятности того, что соответствующий предполагаемый заданный край является целевым заданным краем в порядке убывания.
На этапе 206 может быть сделана попытка идентифицировать целевую информационную область в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения, при этом 1≤i≤n.
Трудность идентификации целевой информационной области обычно невелика. На этом этапе, в предположении, что i-й предполагаемый заданный край является целевым заданным краем, используют i-й предполагаемый заданный край для попытки идентификации целевой информационной области. Если целевая информационная область успешно идентифицирована, i-й предполагаемый заданный край определяют в качестве целевого заданного края, однако если целевая информационная область не идентифицирована, определяют, что i-й предполагаемый заданный край не является целевым заданным краем.
На этапе, на котором полагают, что i-й предполагаемый заданный край является целевым заданным краем, i-й предполагаемый заданный край используется для попытки идентификации целевой информационной области, при этом отсортированные на этапе 204 заданные края проверяют один за другим.
Первое относительное расположение является относительным расположением между целевым заданным краем и целевой информационной областью.
На этапе 208, если целевая информационная область успешно идентифицирована, i-й предполагаемый заданный край определяют в качестве целевого заданного края.
Если целевая информационная область успешно идентифицирована в изображении идентификатора на основе i-го предполагаемого заданного края и первого относительного расположения, то i-й предполагаемый заданный край определяют в качестве целевого заданного края.
На этапе 210, если целевая информационная область не идентифицирована, то i увеличивают на 1, и способ возвращается на этап 206.
Если целевая информационная область не идентифицирована в изображении идентификатора на основе i-го предполагаемого заданного края и первого относительного расположения, i задают как i+1, и (i+1)-й предполагаемый заданный край определяют в качестве целевого заданного края. Осуществляют попытку идентифицировать целевую информационную область в изображении идентификатора с использованием (i+1)-го предполагаемого заданного края и первого относительного расположения.
На этапе 212 идентифицируют по меньшей мере одну информационную область в изображении идентификатора на основе целевого заданного края.
На основе целевого заданного края, определенного на этапе 208, и второго относительного расположения определяют по меньшей мере одну информационную область.
Информационная область может включать в себя: информационную область имени, информационную область даты рождения, информационную область пола, информационную область адреса, информационную область идентификационного номера гражданина, информационную область порядкового номера, информационную область организации, выдавшей идентификатор, информационную область срока действия и т.п.
Второе относительное расположение является относительным расположением между целевым заданным краем и информационной областью. Первое относительное расположение является подмножеством второго относительного расположения.
Например, второе относительное расположение может включать в себя: относительное расположение между целевым заданным краем и информационной областью имени, относительное расположение между целевым заданным краем и информационной областью даты рождения или относительное расположение между целевым заданным краем и информационной областью пола и т.д.
Подводя итог, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия идентифицируют заданный край в изображении идентификатора, при этом заданный край является краем, расположенным в заданном направлении идентификатора; сортируют n предполагаемых заданных краев; осуществляют попытку идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения, при этом 1≤i≤n, и при этом первое относительное расположение является относительным расположением между целевым заданным краем и целевой информационной областью; и идентифицируют по меньшей мере одну информационную область в изображении идентификатора на основе целевого заданного края. Проблемы в соответствующей области техники, такие как трудность идентификации некоторых информационных областей в изображении идентификатора, полученном непосредственно путем фотографирования, а также неточность положений некоторых информационных областей, могут быть решены. Путем определения целевого заданного края на основе n предполагаемых заданных краев в изображении идентификатора и определения по меньшей мере одной информационной области на основе целевого заданного края можно точно определить положение информационных областей.
При этом путем сортировки n предполагаемых заданных краев, можно добиться повышения скорости определения целевого заданного края и точного определения положения целевого заданного края.
В альтернативном варианте осуществления на основе варианта осуществления, показанного на фиг. 2, идентификация заданного края в изображении идентификатора на этапе 202 может быть реализована альтернативно посредством следующих шагов 202а – 202с, что показано на фиг. 3А.
На этапе 202а изображение идентификатора подвергают фильтрации на горизонтальном фильтре Собеля и бинаризации для получения обработанного изображения идентификатора.
Сначала изображение идентификатора подвергают фильтрации на горизонтальном фильтре Собеля, другими словами, фильтруют посредством оператора Собеля в горизонтальном направлении. Затем отфильтрованное изображение идентификатора подвергают бинаризации. Бинаризация означает сравнение уровней яркости пикселей в изображении идентификатора с заданным пороговым уровнем яркости для разделения пикселей в изображении идентификатора на две группы: группа пикселей, уровни яркости которых превышают заданный пороговый уровень яркости, и группа пикселей, уровни яркости которых меньше заданного порогового уровня яркости. Эти две группы пикселей представлены двумя разными цветами – черным и белым – в изображении идентификатора, таким образом получают бинаризованное изображение идентификатора, показанное на фиг. 3В. Пиксели цвета переднего плана называются пикселями основного цвета и представлены белыми пикселями на фиг. 3В, а пиксели цвета фона называются пикселями фонового цвета и представлены черными пикселями на фиг. 3В.
На этапе 202b проводят обнаружение прямой линии для заданной области в обработанном изображении идентификатора для получения по меньшей мере одной прямой линии.
Заданная область является областью, расположенной в заданном направлении идентификатора. Например, заданная область может быть областью нижнего края идентификатора в изображении идентификатора, или заданная область может быть областью верхнего края идентификатора в изображении идентификатора и т.д.
После получения обработанного изображения идентификатора проводят обнаружение прямой линии, включая построение прямой по точкам или преобразование Хафа, для обработанного изображения идентификатора, так, чтобы получить по меньшей мере одну прямую линию, как показано на фиг. 3С.
На этапе 202с, когда получены n линий, указанные n линий идентифицируют в качестве n предполагаемых заданных краев, причем n≥2.
Например, для обработанного изображения идентификатора проводят обнаружение прямой линии для области нижнего края идентификатора в изображении идентификатора. Путем построения прямой по точкам или преобразования Хофа могут быть получены n предполагаемых заданных краев, тогда область n предполагаемых нижних краев идентификатора в бинаризованном изображении идентификатора является такой, как показано на фиг. 3D.
Когда получена только одна прямая линия, то эту линию идентифицируют в качестве целевого заданного края в изображении идентификатора, и затем способ переходит на этап 212.
Таким образом, в способе идентификации области согласно указанному варианту осуществления настоящего раскрытия, изображение идентификатора подвергают фильтрации на горизонтальном фильтре Собеля и бинаризации для получения обработанного изображения идентификатора; выполняют обнаружение прямой линии для заданной области в обработанном изображении идентификатора для получения по меньшей мере одной прямой линии; идентифицируют n линий в качестве n предполагаемых заданных краев. В результате повышается точность обнаружения целевого заданного края в изображении идентификатора и точность последующей идентификации информационной области.
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанном на фиг. 2, сортировку n предполагаемых заданных краев на этапе 204 можно осуществлять альтернативно посредством последующих этапов 204а и 204b, что показано на фиг. 4.
На этапе 204а каждый предполагаемый заданный край пересекают с пикселями основного цвета в одинаковом положении в обработанном изображении идентификатора для получения ряда точек пересечения, соответствующих предполагаемому заданному краю, при этом обработанное изображение идентификатора является изображением, подвергнутым фильтрации на горизонтальном фильтре Собеля и бинаризации.
После получения n предполагаемых заданных краев, изображение идентификатора сначала подвергают фильтрации на горизонтальном фильтре Собеля, другими словами, изображение идентификатора подвергают фильтрации посредством оператора Собеля в горизонтальном направлении. Затем отфильтрованное изображение идентификатора бинаризуют.
Каждый предполагаемый заданный край пересекают с пикселями основного цвета в одинаковом положении в обработанном изображении идентификатора. То есть, подсчитывают пиксели каждого предполагаемого заданного края, содержащие основной цвет в одинаковых положениях в бинаризованном изображении идентификатора.
На этапе 204b n предполагаемых заданных краев сортируют на основе указанного ряда точек пересечения в порядке убывания.
После получения ряда соответствующих точек пересечения для каждого предполагаемого заданного края, n предполагаемых заданных крав сортируют на основе указанного ряда точек пересечения в порядке убывания для получения n отсортированных предполагаемых заданных краев.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия путем сортировки n предполагаемых заданных краев может быть увеличена скорость определения целевого заданного края, повышена точность определения положения целевого заданного края и точность последующей идентификации информационной области.
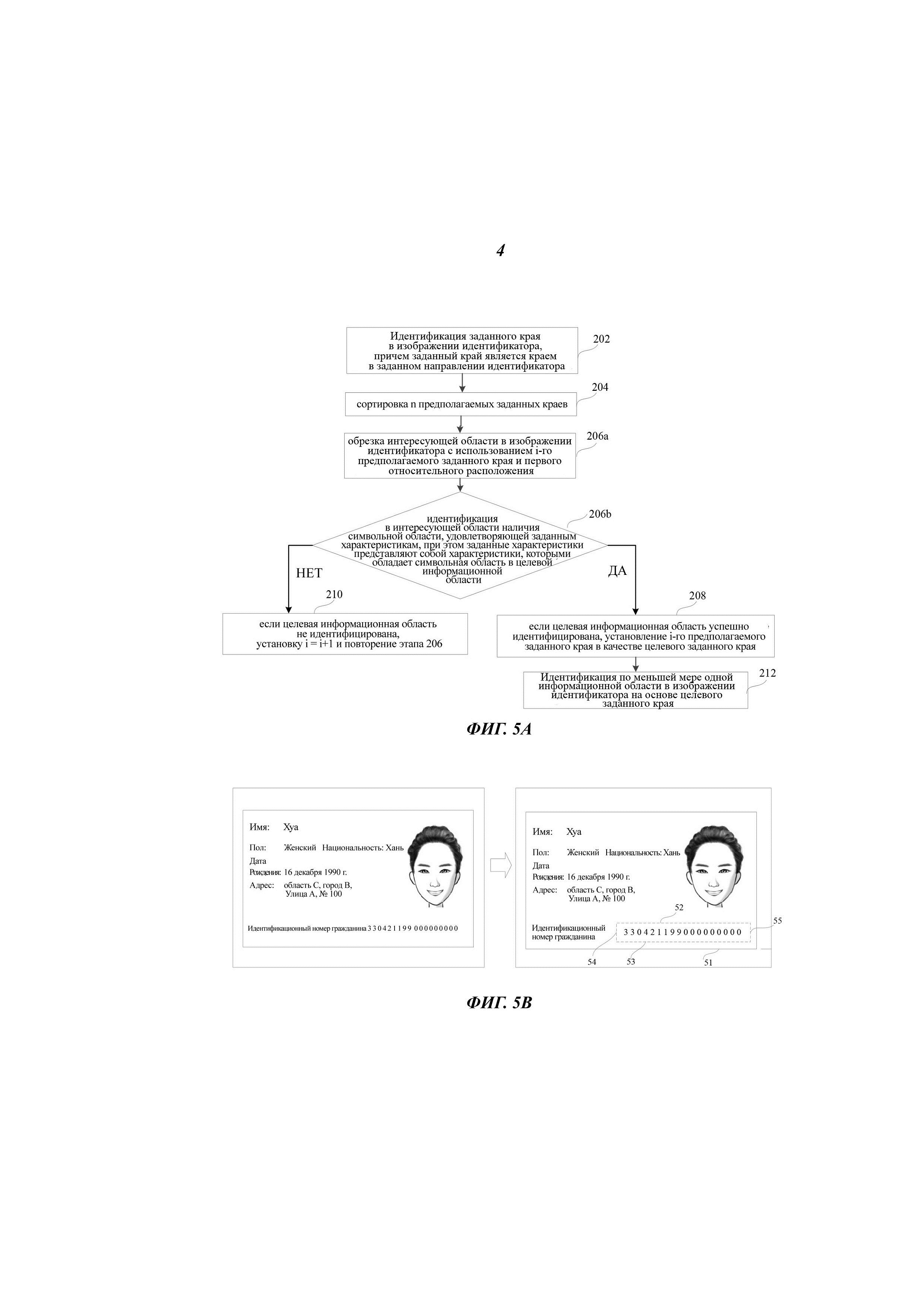
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанном на фиг. 2, попытку идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения на этапе 206 можно осуществлять альтернативно путем следующих этапов 206а и 206b, что показано на фиг. 5А.
На этапе 206а интересующую область в изображении идентификатора обрезают с использованием i-го предполагаемого заданного края и первого относительного расположения.
На основе i-го предполагаемого заданного края и первого относительного расположения могут быть определены приблизительные положения верхнего края, нижнего края, левого края и правого края интересующей области. Следовательно, интересующая область в изображении идентификатора может быть обрезана на основе определенных таким образом верхнего края, нижнего края, левого края и правого края интересующей области.
Например, в предположении, что целевым заданным краем является нижний край удостоверения личности, i-й предполагаемый заданный край на фиг 3С определяют в качестве нижнего края удостоверения 51 личности. На основе относительного расположения между нижним краем удостоверения 51 личности и идентификационным номером гражданина могут быть определены приблизительные положения верхнего края 52, нижнего края 53, левого края 54 и правого края 55, что показано на фиг. 5В.
Интересующая область обозначает область, определенную на основе i-го предполагаемого заданного края и первого относительного расположения.
На этапе 206b идентифицируют наличие символьной области, удовлетворяющей заданным характеристикам, в интересующей области, при этом заданные характеристики являются характеристиками, которыми обладает символьная область в целевой информационной области.
После обрезки интересующей области идентифицируют наличие символьной области, удовлетворяющей заданным характеристикам, в интересующей области на основе заданных характеристик.
Заданные характеристики являются характеристиками, которыми обладает символьная область в целевой информационной области. Например, целевая информационная область может быть информационной областью идентификационного номера гражданина. Характеристиками могут являться: содержание 18 последовательных символьных областей (или 18 числовых областей), малое символьное пространство между двумя соседними символьными областями и высота каждой символьной области, лежащая в заданном диапазоне.
Если наличие символьной области, удовлетворяющей заданным характеристикам, в интересующей области идентифицировано, целевая информационная область идентифицируется успешно.
Если идентифицировано, что символьной области, удовлетворяющей заданным характеристикам, в интересующей области нет, то целевая информационная область не идентифицируется.
Альтернативно идентификация наличия символьной области, удовлетворяющей заданным характеристикам, в интересующей области на этапе 206b может быть осуществлена посредством следующих этапов 301-305, что показано на фиг. 6А.
На этапе 301 интересующую область бинаризуют для получения бинаризованной интересующей области.
Например, положив предположение, что интересующей областью является информационная область идентификационного номера гражданина, интересующую область можно опционально предварительно обработать. Предварительная обработка может включать в себя такие операции, как шумоподавление, фильтрация, выделение краев и т.д. Предварительно обработанная интересующая область может быть бинаризована.
На этапе 302 вычисляют первую гистограмму для бинаризованной интересующей области в горизонтальном направлении, при этом первая гистограмма содержит вертикальные координаты пикселей в каждой строке и количество пикселей основного цвета среди пикселей в каждой строке.
Первую гистограмму для бинаризованной интересующей области вычисляют в горизонтальном направлении, при этом первая гистограмма представляет вертикальные координаты пикселей в каждой строке в вертикальном направлении и количество пикселей основного цвета среди пикселей в каждой строке в горизонтальном направлении. Пиксели основного цвета являются белыми пикселями в бинаризованном изображении, что показано на фиг. 6В.
На этапе 303 вычисляют вторую гистограмму для бинаризованной интересующей области в вертикальном направлении, причем вторая гистограмма содержит горизонтальные координаты пикселей в каждом столбце и количество пикселей основного цвета среди пикселей в каждом столбце.
Вторую гистограмму для бинаризованной интересующей области вычисляют в вертикальном направлении, причем вторая гистограмма представляет горизонтальные координаты пикселей в каждом столбце в горизонтальном направлении и количество пикселей основного цвета среди пикселей в каждом столбце в вертикальном направлении, что показано на фиг. 6С.
На этапе 304, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, соответствует заданному диапазону высоты, и количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, соответствует заданному количеству, то символьная область, удовлетворяющая заданным характеристикам, успешно идентифицируется в интересующей области.
Количество пикселей основного цвета среди пикселей в каждой строке может быть получено на основе первой гистограммы. Путем сравнения количества пикселей основного цвета среди пикселей в каждой строке с первым пороговым значением может быть получена высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение.
Множество последовательных строк означает множество m последовательных строк пикселей, если количество пикселей основного цвета в каждой из m строк превышает первое пороговое значение. Как показано на фиг. 6D, для каждой из m последовательных строк пикселей на фиг. 6D количество пикселей основного цвета в левой гистограмме превышает первое пороговое значение. m последовательных строк пикселей соответствуют строке идентификационного номера гражданина «0421299» в изображении идентификатора. Высота m последовательных строк пикселей является, таким образом, высотой множества последовательных строк.
Количество пикселей основного цвета среди пикселей в каждом столбце может быть получено на основе второй гистограммы. Путем сравнения количества пикселей основного цвета среди пикселей в каждом столбце со вторым пороговым значением, может быть получено количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение.
Множество последовательных столбцов означает множество p последовательных столбцов пикселей, если количество пикселей основного цвета в каждом из p столбцов превышает второе пороговое значение. Как показано на фиг. 6Е, множество последовательных столбцов обозначено «p», т.е. последовательные белые области, сформированные во второй гистограмме. Для каждого из p последовательных столбцов пикселей на фиг. 6Е количество пикселей основного цвета в нижней гистограмме превышает второе пороговое значение. p последовательных столбцов пикселей соответствуют символьной области «3» в изображении идентификатора.
Если высота множества последовательных строк соответствует заданному диапазону высоты, и количество множеств последовательных столбцов удовлетворяет заданному условию, то определяют, что символьная область, удовлетворяющая заданным характеристикам, успешно идентифицирована в интересующей области.
На этапе 305, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, не соответствует заданному диапазону высоты, или количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, не соответствует заданному условию, определяют, что символьная область, удовлетворяющая заданным характеристикам, не идентифицирована в интересующей области.
Если высота множества последовательных строк не соответствует заданному диапазону высоты, или количество множеств последовательных столбцов не удовлетворяет заданному условию, то символьная область, удовлетворяющая заданным характеристикам не идентифицируется в интересующей области.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия путем бинаризации интересующей области, вычисления первой гистограммы и второй гистограммы бинаризованной интересующей области в горизонтальном направлении и вертикальном направлении соответственно и определения того, идентифицирована ли символьная область, удовлетворяющая заданным характеристикам, на основе высоты множества последовательных строк в первой гистограмме и количества множеств последовательных столбцов во второй гистограмме, можно увеличить точность определения положения символьной области.
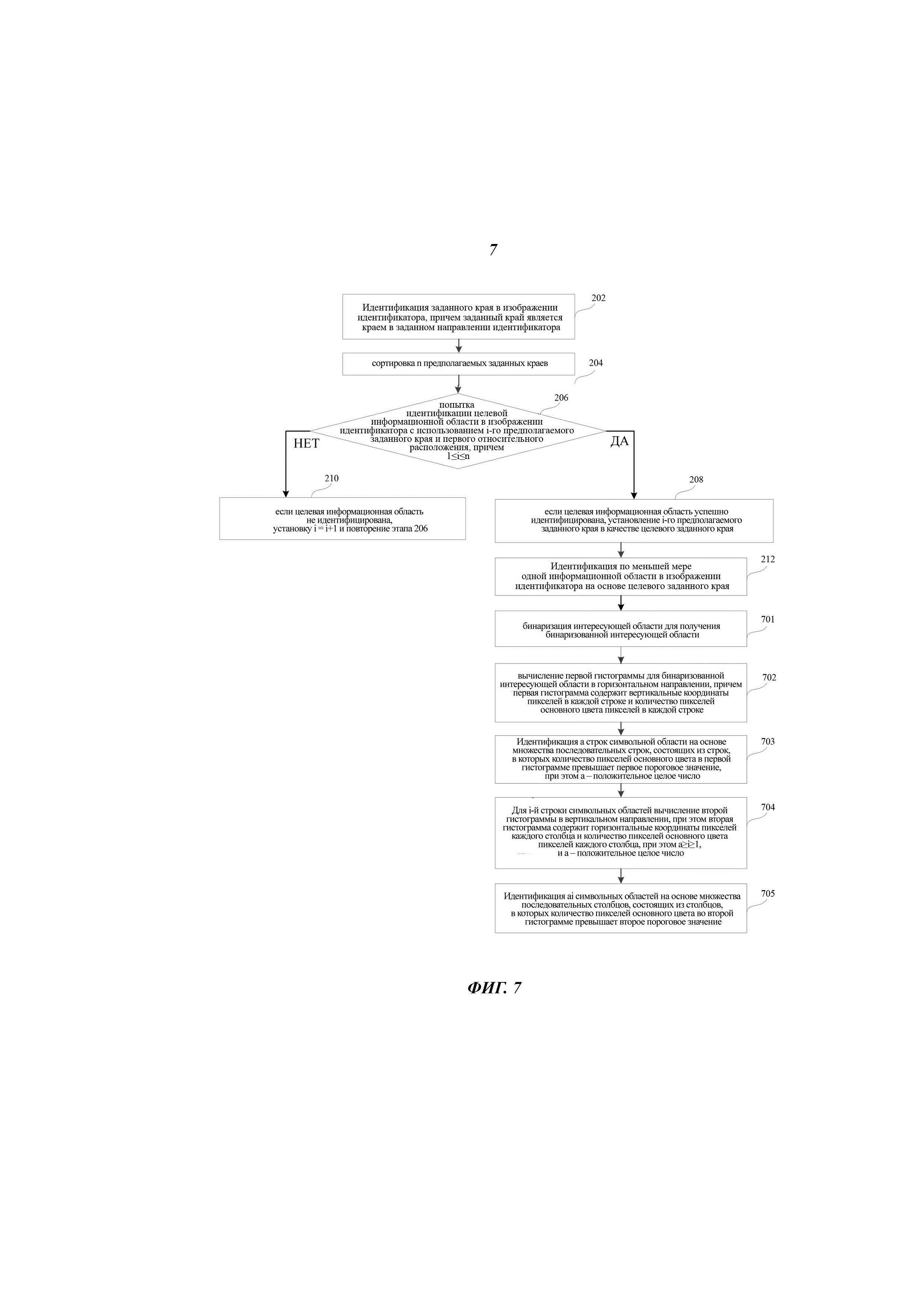
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанным на фиг. 2, после идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края, могут быть идентифицированы символы в информационной области на основе следующих этапов, как показано на фиг. 7.
На этапе 701 интересующую информационную область бинаризуют для получения бинаризованной интересующей области.
В предположении, например, что интересующей областью является область идентификационного номера гражданина, эта интересующая область может быть предварительно обработана. Предварительная обработка может включать в себя такие операции, как шумоподавление, фильтрация, выделение краев и т.д. Предварительно обработанная интересующая область может быть бинаризована.
На этапе 702 вычисляют первую гистограмму бинаризованной интересующей области в горизонтальном направлении, причем первая гистограмма содержит вертикальные координаты пикселей в каждой строке и количество пикселей основного цвета среди пикселей в каждой строке.
На этапе 703 идентифицируют a строк символьных областей на основе множества последовательных строк, состоящих из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, причем a представляет собой положительное целое число.
Количество пикселей основного цвета среди пикселей каждой строки может быть получено на основе первой гистограммы. Путем сравнения количества пикселей основного цвета среди пикселей каждой строки с первым пороговым значением, множество последовательных строк, состоящее из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, определяют в качестве строки, в которой расположена символьная область.
Если информационной областью является информационная область адреса или другая информационную область, символьная область может содержать две или более строк. В данном случае каждое множество последовательных строк может быть идентифицировано в качестве строки символьной области, и a множеств последовательных строк идентифицируют в качестве a строк символьных областей.
На этапе 704 для i-й строки символьных областей вычисляют вторую гистограмму в вертикальном направлении, при этом вторая гистограмма содержит горизонтальные координаты пикселей каждого столбца и количество пикселей основного цвета среди пикселей каждого столбца, при этом a≥i≥1, и i – положительное целое число.
Для идентифицированной строки идентификационного номера гражданина вычисляют вторую гистограмму в вертикальном направлении, при этом вторая гистограмма представляет горизонтальную координату пикселей каждого столбца в горизонтальном направлении и количество пикселей основного цвета среди пикселей каждого столбца в вертикальном направлении.
На этапе 705 ai символьных областей идентифицируют на основе множества последовательных столбцов, состоящего из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение.
Количество пикселей основного цвета среди пикселей в каждом столбце может быть получено на основе второй гистограммы. Путем сравнения количества пикселей основного цвета среди пикселей каждого столбца со вторым пороговым значением, множество последовательных столбцов, состоящее из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, может быть определено в качестве столбца, в котором расположена символьная область.
Каждое множество последовательных столбцов может быть идентифицировано в качестве одной символьной области, и b множеств последовательных столбцов идентифицируют в качестве b символьных областей. На фиг. 6Е могут быть идентифицированы 18 символьных областей.
При наличии a строк символьных областей этапы 701 и 705 выполняют один раз для каждой строки символьной области, таким образом, всего их выполняют a раз.
Для каждой идентифицированной символьной области символы, содержащиеся в символьной области, могут быть идентифицированы посредством технологии распознавания символов. Символы могут быть китайскими символами, английскими буквами, цифрами или единичными символами на других языках.
Подводя итог, в способе идентификации области согласно данному варианту осуществления настоящего изобретения путем бинаризации информационной области, вычисления первой гистограммы бинаризованной информационной области в горизонтальном направлении, определения a строк символьных областей в информационной области, вычисления второй гистограммы a строк символьных областей в вертикальном направлении и идентификации символьной области, которой соответствует каждый символ, можно повысить точность идентификации символьных областей в информационной области.
Ниже раскрываются варианты осуществления устройства согласно настоящему изобретению, которое может быть использовано для выполнения вариантов осуществления способа по настоящему изобретению. Детали, не описанные в вариантах осуществления устройства, можно найти в описании вариантов осуществления способа согласно настоящему раскрытию.
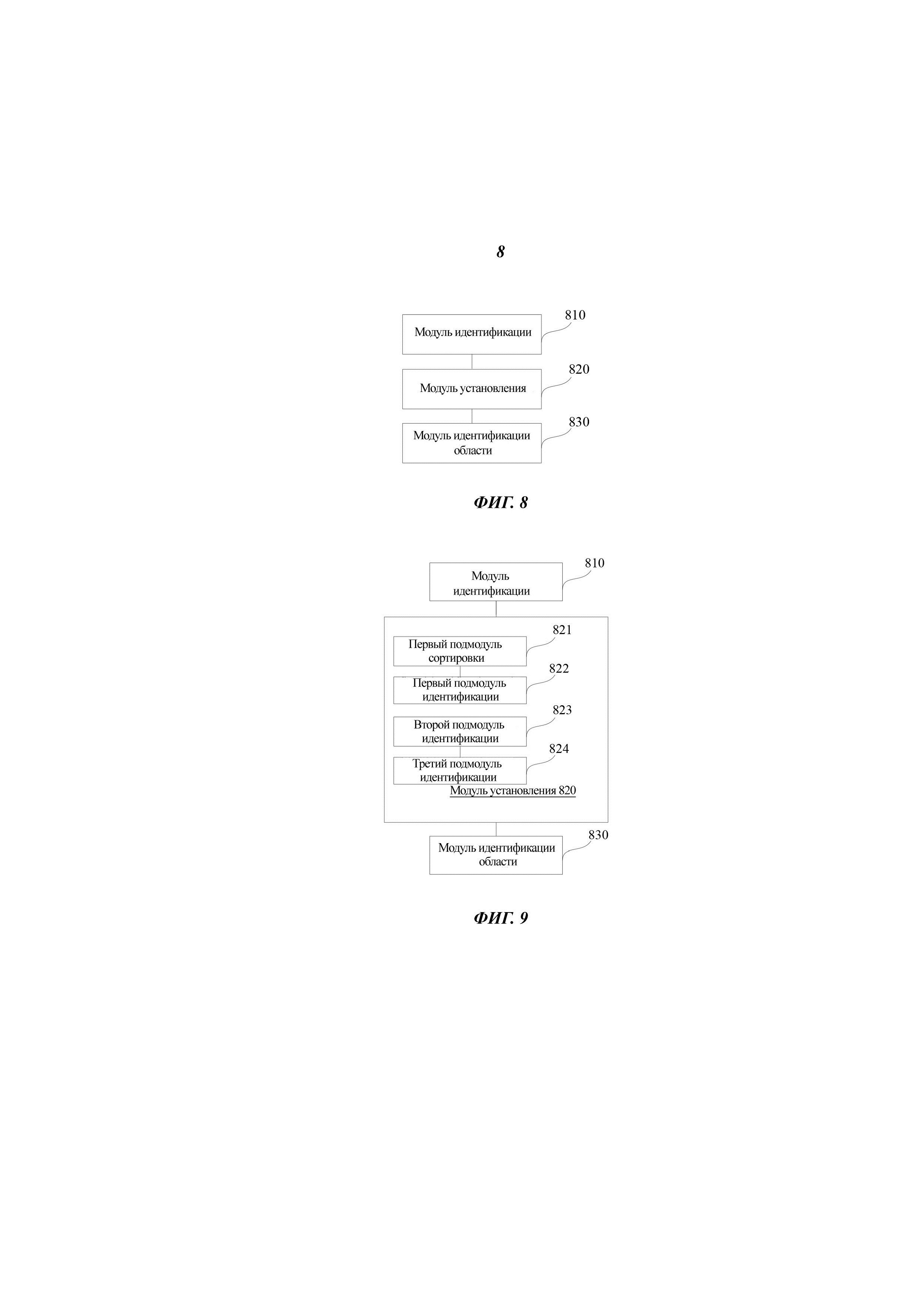
На фиг. 8 представлена структурная схема устройства для идентификации области согласно одному из примеров осуществления. Как показано на фиг. 8, устройство содержит, но не ограничивается следующим.
Модуль 810 идентификации выполнен с возможностью идентификации заданного края в изображении идентификатора, причем заданный края является краем в заданном направлении идентификатора.
Изображение идентификатора может быть изображением, полученным непосредственно путем фотографирования идентификатора, например, изображением удостоверения личности, изображением карточки социального страхования и т.п.
Заданный край может являться любым из следующего: верхним краем, нижним краем, левым краем, правым краем идентификатора.
Модуль 820 определения выполнен с возможностью определения одного из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, причем n≥2.
При n≥2 модель 820 определения выполнена с возможностью определения одного из n предполагаемых заданных краев в качестве целевого заданного края идентификатора в изображении идентификатора.
Целевой заданный край может рассматриваться в качестве реального заданного края, истинного заданного края или заданного края с высокой точностью.
Модуль 830 идентификации области сконфигурирован для идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края.
Информационная область относится к области, несущей символьную информацию в изображении идентификатора, такую как по меньшей мере одно из следующего: информационная область имени, информационная область даты рождения, информационная область пола, информационная область адреса, информационная область идентификационного номера гражданина, информационная область порядкового номера, информационная область организации, выдавшей идентификатор, информационная область срока действия и т. п.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего изобретения, путем идентификации заданного края в изображении идентификатора, причем заданный края является краем, расположенным в заданном направлении идентификатора; определения одного из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, при этом n≥2; и идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного каря, можно решить проблемы в соответствующей области техники, состоящие в трудности идентификации некоторых информационных областей в изображении идентификатора, полученном непосредственно путем фотографирования, а также неточности положений некоторых информационных областей, и можно достичь точного определения положения информационных областей путем определения целевого заданного края на основе n предполагаемых заданных краев в изображении идентификатора и определения по меньшей мере одной информационной области на основе целевого заданного края.
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанном на фиг. 8, модуль 820 определения может содержать следующие подмодули, как показано на фиг. 9.
Первый подмодуль 821 сортировки выполнен с возможностью сортировки n предполагаемых заданных краев.
После получения n предполагаемых заданных краев сортируют посредством первого подмодуля 821 сортировки на основе вероятности того, что n предполагаемых заданных краев являются целевым заданным краем, в порядке убывания.
Первый подмодуль 822 идентификации выполнен с возможностью осуществления попытки идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения, причем 1≤i≤n.
В предположении, что i-й предполагаемый заданный край является целевым заданным краем, первый подмодуль 822 идентификации пытается использовать i-й предполагаемый заданный край для идентификации целевой информационной области. Если целевая информационная область успешно идентифицирована, то i-й предполагаемый заданный край определяют в качестве целевого заданного края. Если целевая информационная область не идентифицирована, то определяют, что i-й предполагаемый заданный край не является целевым заданным краем.
На этапе, на котором предполагают, что i-й предполагаемый заданный край является целевым заданным краем, первый подмодуль 822 идентификации пытается использовать i-й предполагаемый заданный край для идентификации целевой информационной области, при этом заданные края, отсортированные в первом подмодуле 821 сортировки, проверяются один за другим.
Первое относительное расположение представляет собой относительное расположение между целевым заданным краем и целевой информационной областью.
Второй подмодуль 823 идентификации выполнен с возможностью определения i-го предполагаемого заданного края в качестве целевого заданного края, если целевая информационная область успешно идентифицирована.
Если целевая информационная область в изображении идентификатора успешно идентифицирована посредством первого подмодуля 822 идентификации на основе i-го предполагаемого заданного края и первого относительного расположения, второй подмодуль 823 идентификации выполнен с возможностью определения i-го предполагаемого заданного края в качестве целевого заданного края.
Третий подмодуль 824 идентификации выполнен с возможностью задания i как i+1 и возврата к первому подмодулю 822 идентификации для выполнения функции первого подмодуля 822 идентификации, если целевая информационная область не идентифицирована.
Альтернативно модуль 830 идентификации области дополнительно выполнен с возможностью определения по меньшей мере одной информационной области на основе целевого заданного края и второго относительного расположения. Второе относительное расположение является относительным расположением между целевым заданным краем и информационной областью.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия, путем идентификации заданного края в изображении идентификатора, причем заданный край является краем, расположенным в заданном направлении идентификатора; сортировки n предполагаемых заданных краев; осуществления попытки идентификации целевой информационной области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения, причем 1≤i≤n, и при этом первое относительное расположение является относительным расположением между целевым заданным краем и целевой информационной областью; и идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края, можно решить проблемы в соответствующей области техники, состоящие в трудности идентификации некоторых информационных областей в изображении идентификатора, полученного непосредственно путем фотографирования, и в неточности положений некоторых информационных областей, и можно достичь точного определения положения информационных областей путем определения целевого заданного края на основе n предполагаемых заданных краев в изображении идентификатора и определения по меньшей мере одной информационной области на основе целевого заданного края.
При этом путем сортировки n предполагаемых заданных краев можно достичь увеличения скорости определения целевого заданного края и точного определения положения целевого заданного края.
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанном на фиг. 9, модель 810 идентификации может содержать следующие подмодули, как показано на фиг. 10.
Подмодуль 811 фильтрации выполнен с возможностью фильтрации идентификационного изображении на горизонтальном фильтре Собеля и его бинаризации для получения обработанного изображения идентификатора.
Бинаризация означает сравнение уровней яркости пикселей в изображении идентификатора с заданным пороговым уровнем яркости и разделение пикселей в изображении идентификатора на две группы: группа пикселей, уровни яркости которых превышают заданный пороговый уровень яркости, и группа пикселей, уровни яркости которых меньше заданного порогового уровня яркости. Эти две группы пикселей представлены двумя разными цветами – черным и белым – в изображении идентификатора, таким образом получая бинаризованное изображение идентификатора.
Подмодуль 812 обнаружения выполнен с возможностью выполнения обнаружения прямой линии в заданной области в обработанном информационном изображении с целью получения по меньшей мере одной прямой линии.
Заданная область может быть областью в заданном направлении идентификатора.
После получения обработанного изображения идентификатора посредством подмодуля 811 фильтрации, подмодуль 812 обнаружения проводит обнаружение прямой линии, включая построение прямой по точкам или преобразование Хофа, для обработанного изображения идентификатора с целью получения по меньшей мере одной линии.
Подмодуль 813 идентификации края выполнен с возможностью идентификации n линий в качестве предполагаемых заданных краев, когда получены n линий, причем n≥2.
Когда получена только одна линия, эту линию идентифицируют в качестве целевого заданного края в изображении идентификатора, и выполнение переходит к реализации функции модуля 830 идентификации области.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия путем фильтрации изображения идентификатора на горизонтальном фильтре Собеля и его бинаризации для получения обработанного изображения идентификатора, осуществления обнаружения прямой линии в заданной области в обработанном изображении идентификатора для получения по меньшей мере одной линии, и идентификации n линий в качестве n предполагаемых заданных краев, повышается точность обнаружения целевого заданного края в изображении идентификатора и точность последующей идентификации информационной области.
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанном на фиг. 9, первый подмодуль 821 сортировки может содержать следующие подмодули, как показано на фиг. 11А.
Подмодуль 1110 пересечения выполнен с возможностью пересечения предполагаемого заданного края с пикселями основного цвета в одинаковом положении в обработанном изображении идентификатора для каждого предполагаемого заданного края с целью получения ряда точек пересечения, соответствующих предполагаемому заданному краю.
Обработанное изображение идентификатора является изображением, обработанным посредством подмодуля 811 фильтрации.
После получения n предполагаемых заданных краев посредством подмодуля 813 идентификации края, изображение идентификатора вначале подвергают фильтрации на горизонтальном фильтре Собеля, другими словами, изображение идентификатора подвергают фильтрации с помощью оператора Собеля в горизонтальном направлении. Далее отфильтрованное изображение идентификатора бинаризуют.
Пересечение заданного края с пикселями основного цвета в одинаковом положении в обработанном изображении идентификатора для каждого предполагаемого заданного края посредством подмодуля 1110 пересечения означает вычисление количества пикселей каждого предполагаемого заданного края, содержащих основной цвет в одинаковых положениях в бинаризованном изображении идентификатора.
Второй подмодуль 1120 сортировки выполнен с возможностью сортировки n предполагаемых заданных краев на основе указанного ряда точек пересечения в порядке убывания.
После получения ряда соответствующих точек пересечения для каждого предполагаемого заданного края посредством подмодуля 1110 пересечения второй подмодуль 1120 сортировки сортирует n предполагаемых заданных краев на основе ряда точек пересечения в порядке убывания для получения n отсортированных предполагаемых заданных краев.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия путем сортировки n предполагаемых заданных краев можно увеличить скорость определения целевого заданного края, повысить точность определения положения целевого заданного края и точность последующей идентификации информационной области.
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанном на фиг. 9, первый подмодуль 822 идентификации может содержать следующие подмодули, как показано на фиг. 11В.
Подмодуль 1130 обрезки выполнен с возможностью обрезки интересующей области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения.
На основе i-го предполагаемого заданного края и первого относительного расположения можно определить приблизительные положения верхнего края, нижнего края, левого края и правого края интересующей области. Следовательно, подмодуль 1130 обрезки может обрезать интересующую область в изображении идентификатора на основе определенных таким образом верхнего края, нижнего края, левого края и правого края интересующей области.
Интересующая область означает область, определенную на основе i-го предполагаемого заданного края и первого относительного расположения.
Четвертый подмодуль 1140 идентификации выполнен с возможностью идентификации наличия символьной области, удовлетворяющей заданным характеристикам, в интересующей области, причем заданные характеристики являются характеристиками, которыми обладает символьная область в целевой информационной области.
После обрезки интересующей области посредством подмодуля 1130 обрезки, четвертый подмодуль 1140 идентификации идентифицирует наличие символьной области, удовлетворяющей заданным характеристикам, в интересующей области на основе заданных характеристик.
Заданные характеристики являются характеристиками, которыми обладает символьная область в целевой информационной области.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия путем обрезки интересующей области в изображении идентификатора с использованием i-го предполагаемого заданного края и первого относительного расположения может быть увеличена скорость определения целевого заданного края, повышена точность определения положения целевого заданного края и точность последующей идентификации информационной области.
В альтернативном варианте осуществления в соответствии с вариантом осуществления, показанным на фиг. 11В, четвертый подмодуль 1140 идентификации может содержать следующие подмодули, как показано на фиг. 12.
Подмодуль 1141 бинаризации выполнен с возможностью бинаризации интересующей области для получения бинаризованной интересующей области.
В предположении, что интересующая область является, например, областью идентификационного номера гражданина, подмодуль 1141 бинаризации может альтернативно предварительно обработать интересующую область. Предварительная обработка может содержать такие операции, как шумоподавление, фильтрация, выделение краев и т.д. Предварительно обработанная интересующая область может быть бинаризована.
Первый подмодуль 1142 вычисления выполнен с возможностью вычисления первой гистограммы бинаризованной интересующей области в горизонтальном направлении, причем первая гистограмма содержит вертикальные координаты пикселей в каждой строке и количество пикселей основного цвета среди пикселей в каждой строке.
Первый подмодуль 1142 вычисления вычисляет первую гистограмму интересующей области, обработанной посредством подмодуля 1141 бинаризации, в горизонтальном направлении, при этом первая гистограмма представляет вертикальные координаты пикселей в каждой строке в вертикальном направлении и количество пикселей основного цвета среди пикселей в каждой строке в горизонтальном направлении.
Второй подмодуль 1143 вычисления выполнен с возможностью вычисления второй гистограммы бинаризованной интересующей области в вертикальном направлении, при этом вторая гистограмма содержит горизонтальные координаты пикселей в каждом столбце и количество пикселей основного цвета среди пикселей в каждом столбце.
Второй подмодуль 1143 вычисления вычисляет вторую гистограмму интересующей области, обработанной посредством подмодуля 1141 бинаризации, в вертикальном направлении, при этом вторая гистограмма представляет горизонтальные координаты пикселей в каждом столбце в горизонтальном направлении и количество пикселей основного цвета среди пикселей в каждом столбце в вертикальном направлении.
Подмодуль 1144 символьной идентификации выполнен с возможностью определения того, что символьная область, удовлетворяющая заданным характеристикам, успешно идентифицирована в интересующей области, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, соответствует заданному диапазону высоты, и количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, удовлетворяет заданному условию.
Количество пикселей основного цвета среди пикселей в каждой строке может быть получено на основе первой гистограммы. Путем сравнения количества пикселей основного цвета среди пикселей каждой строки с первым пороговым значением, подмодуль 1144 символьной идентификации может получить высоту множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение.
Множество последовательных строк означает множество m последовательных строк пикселей, в которых количество пикселей основного цвета превышает первое пороговое значение.
Количество пикселей основного цвета среди пикселей в каждом столбце может быть получено на основе второй гистограммы. Путем сравнения количества пикселей основного цвета среди пикселей в каждом столбце со вторым пороговым значением, подмодуль 1144 символьной идентификации может получить количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение.
Пятый подмодуль 1145 идентификации выполнен с возможностью определения того, что символьная область, удовлетворяющая заданным характеристикам, не идентифицирована в интересующей области, если высота множества последовательных строк, состоящего из строк, в которых количество пикселей основного цвета в первой гистограмме превышает первое пороговое значение, не соответствует заданному диапазону высоты, или количество множеств последовательных столбцов, состоящих из столбцов, в которых количество пикселей основного цвета во второй гистограмме превышает второе пороговое значение, не удовлетворяет заданному условию.
Если высота множества последовательных строк не соответствует заданному диапазону высоты, или количество множеств последовательных столбцов не удовлетворяет заданному условию, пятый подмодуль 1145 идентификации определяет, что символьная область, удовлетворяющая заданным характеристикам, не идентифицирована в интересующей области.
Таким образом, в способе идентификации области согласно данному варианту осуществления настоящего раскрытия путем бинаризации интересующей области, вычисления первой гистограммы и второй гистограммы бинаризованной интересующей области в горизонтальном направлении и вертикальном направлении соответственно, определения того, идентифицирована ли символьная область, удовлетворяющая заданным характеристикам, на основе высоты множества последовательных строк в первой гистограмме и количества множеств последовательных столбцов во второй гистограмме, может быть повышена точность определения положения символьной области.
В примере осуществления настоящего изобретения предложено устройство для идентификации области, которое может реализовывать способ идентификации области, предложенный в настоящем раскрытии. Устройство содержит процессор; память для хранения инструкций, выполняемых процессором; при этом процессор выполнен с возможностью: идентификации заданного края в изображении идентификатора, при этом заданный края является краем, расположенным в заданном направлении идентификатора; определения одного из n предполагаемых заданных краев в качестве целевого заданного края, когда были идентифицированы n предполагаемых заданных краев, при этом n≥2; и идентификации по меньшей мере одной информационной области в изображении идентификатора на основе целевого заданного края.
Относительно устройства в вышеприведенных вариантах осуществления, конкретные способы, с помощью которых соответствующие модули выполняют операции, были раскрыты подробно в вариантах осуществления в отношении соответствующих способов и не будут рассматриваться далее.
На фиг. 13 представлена структурная схема устройства для идентификации области согласно одному из примеров осуществления. Например, устройство 1300 может быть мобильным телефоном, компьютером, цифровым широковещательным терминалом, устройством обмена сообщениями, игровой консолью, планшетом, медицинским устройством, спортивным тренажером, карманным персональным компьютером и т. п.
Согласно фиг.13, устройство 1302 может содержать один или более из следующих компонентов: блок 1302 обработки, память 1304, блок 1306 питания, мультимедийный блок 1308, звуковой блок 1310, интерфейс 1312 ввода/вывода (I/O), блок 1304 датчиков и блок 1316 связи.
Блок 1302 обработки обычно управляет всеми операциями устройства 1300, такими как операции, связанные с отображением, телефонными звонками, передачей данных, операциями с камерой и операциями записи. Блок 1302 обработки может содержать один или более процессоров 1318 для выполнения инструкций по осуществлению всех или части этапов раскрытых выше способов. Более того, блок 1302 обработки может содержать один или более модулей, способствующих взаимодействию между блоком 1302 обработки и другими блоками. Например, блок 1302 обработки может содержать мультимедийный модуль, способствующий взаимодействию между блоком 1302 обработки и мультимедийным блоком 1308.
Память 1304 выполнена с возможностью хранения данных различных типов для обеспечения работы устройства 1300. Примеры таких данных могут включать в себя инструкции для любых приложений или способов, выполняемых на устройстве 1300, контактные данные, данные телефонной книжки, сообщения, картинки, видео и т. п. Память 1304 может быть реализовано с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств или их комбинации, например, статическое оперативное запоминающее устройство (статическое ОЗУ), электрически стираемое перепрограммируемое постоянное запоминающее устройство (ЭСППЗУ), стираемое перепрограммируемое постоянное запоминающее устройство (СППЗУ), программируемое постоянное запоминающее устройство (ППЗУ), постоянное запоминающее устройство (ПЗУ), магнитное запоминающее устройство, флеш-память, магнитный или оптический диск.
Блок 1306 питания обеспечивает питание для различных блоков устройства 1300. Блок 1306 питания может содержать систему управления питанием, один или более источников питания и любые другие компоненты, связанные с генерацией, управлением и распределением энергии для устройства 1300.
Мультимедийный блок 1308 содержит экран, обеспечивающий интерфейс вывода между устройством 1300 и пользователем. В некоторых вариантах осуществления экран может содержать жидкокристаллический дисплей (ЖКД) и сенсорную панель (СП). Если экран содержит сенсорную панель, то экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель содержит один или более датчиков для обнаружения прикосновений, проводок и жестов на сенсорной панели. Датчики прикосновения могут не только обнаруживать границы прикосновения или проводок, но также определять период времени и давление, связанное с прикосновением или проводкой. В некоторых вариантах осуществления мультимедийный блок 1308 содержит фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера могут принимать внешние мулитимедийные данные, когда устройство 1300 находится в рабочем режиме, например, режиме фотографирования или режиме видео. Как фронтальная камера, так и задняя камера могут являться неподвижными системами оптических линз или иметь возможность фокусировки и увеличения.
Звуковой блок 1310 выполнен с возможностью выдачи и/или приема звуковых сигналов. Например, звуковой блок 1310 содержит микрофон, выполненный с возможностью приема внешнего звукового сигнала, когда устройство 1300 находится в рабочем режиме, например, в режиме разговора, режиме записи или режиме распознавания голоса. Принятый звуковой сигнал может быть далее сохранен в памяти 1304 или передан через блок 1316 связи. В некоторых вариантах осуществления звуковой блок 1310 также содержит динамик для выдачи звуковых сигналов.
Интерфейс 1312 ввода/вывода обеспечивает интерфейс между блоком 1302 обработки и периферийными модулями интерфейса, периферийными модулями интерфейса могут являться, например, клавиатура, нажимаемое колесико, кнопки и т.п. Кнопки могут включать в себя, но не ограничиваться, кнопку «Домой», кнопку громкости, кнопку запуска и кнопку блокировки.
Блок 1314 датчиков содержит один или более датчиков для обеспечения оценок состояния различных частей устройства 1300. Например, блок 1314 датчиков может обнаруживать состояние открыто/закрыто устройства 1300, относительное расположение компонентов (например, экрана и клавиатуры устройства 1300), изменение положения устройства 1300 или компонента устройства 1300, наличие или отсутствие контакта пользователя с устройством 1300, ориентация или ускорение/замедление устройства 1300 и изменение температуры устройства 1300. Блок 1314 датчиков может содержать датчик приближения, выполненный с возможностью обнаружения наличия рядом находящегося объекта без физического контакта. Блок 1314 датчиков может также содержать датчик света, такой как КМОП или ПЗС преобразователь изображений, для использования в приложениях, связанных с построением изображений. В некоторых вариантах осуществления блок 314 датчиков может также содержать акселерометр, гироскоп, магнитный датчик, датчик давления или температурный датчик.
Блок 1316 связи выполнен с возможностью обеспечения связи, проводной или беспроводной, между устройством 1300 и другими устройствами. Устройство 1300 может осуществлять доступ в беспроводную сеть на основе стандарта связи, например, WiFi, 2G или 3G или их комбинации. В одном из вариантов осуществления блок 1316 связи принимает широковещательный сигнал или сопряженную широковещательную информацию от внешней системы управления широковещательной передачей через широковещательный канал. В одном из вариантов осуществления блок 1316 связи также содержит модуль связи малого радиуса действия (NFC) для обеспечения связи на коротких расстояниях. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), технологии сверхширокополосной (UWB) связи, технологии Bluetoth (BT) и других технологий.
В примерах осуществления настоящего изобретения устройство 1300 может быть реализовано с помощью одного или более компонентов из числа специализированных интегральных микросхем (ASIC), процессоров цифровых сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для выполнения раскрытых выше способов.
В примерах осуществления настоящего изобретения также предусмотрен долговременный машиночитаемый носитель информации, содержащий инструкции, например, имеющиеся в памяти 1304, выполняемые процессором 1318 в устройстве 1300, для осуществления раскрытых выше способов. Например, долговременный машиночитаемый носитель информации может являться ПЗУ, ОЗУ, CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных и т. п.
Иные варианты осуществления настоящего изобретения должны быть понятны специалисту в данной области техники из рассмотрения спецификации и осуществления на практике настоящего раскрытия. Подразумевается, что данная заявка охватывает любые варианты, назначения или доработки настоящего раскрытия, исходя из его основных принципов и включает в себя такие отступления от настоящего раскрытия, которые могут следовать из известной информации или обычной практики в данной области техники. Предполагается, что данная спецификация и примеры осуществления будут рассматриваться только в качестве примеров, включенных в объем и предмет настоящего изобретения, указанного в нижеследующей формуле изобретения.
Следует понимать, что идея настоящего изобретения не ограничена конкретной конструкцией, которая была раскрыта выше и проиллюстрирована на прилагаемых чертежах, и что могут быть сделаны различные модификации и изменения без отступления от объема настоящего изобретения. Предполагается, что объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
Способ и устройство для отображения информации уведомления
Способ и устройство для получения информации
Способ и устройство для блокировки файла
Способ и устройство для управления полномочиями
Способ и устройство для обработки идентификатора видеофайла
Способ, устройство и система для установления беспроводного сетевого соединения
Способ и оборудование для управления устройством
Способ и устройство для обработки уведомления о безопасности
Способ и устройство для совместного использования фотографии
Способ и устройство для обеспечения стационарного состояния балансирующего транспортного средства
Способ и устройство для отображения информации уведомления
Способ и устройство для получения информации
Способ и устройство для блокировки файла
Способ и устройство для управления полномочиями
Способ и устройство для обработки идентификатора видеофайла
Способ, устройство и система для установления беспроводного сетевого соединения
Способ и оборудование для управления устройством
Способ и устройство для обработки уведомления о безопасности
Способ и устройство для совместного использования фотографии
Способ и устройство для обеспечения стационарного состояния балансирующего транспортного средства

