Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ УСТРОЙСТВ ПРИ РАЗДЕЛЕНИИ ЗАГОТОВКИ ВДОЛЬ ЛИНИИ РАЗДЕЛЕНИЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение касается способа управления системой устройств при разделении заготовки вдоль линии разделения согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
При реализации способа ручного разделения заготовки вдоль линии разделения оператор в процессе обработки должен двигаться к конечным точкам разделительной линии, вручную управляя моторизованным подающим устройством. Если полотно пилы окружено защитным кожухом полотна, то точки выхода полотна пилы в заготовке плохо видны оператору или не видны вообще, так что оператор во время обработки не может определить конечные точки линии разделения.
Из европейской заявки ЕР 1693173 А1 известен по меньшей мере на отдельных этапах автоматизированный способ управления системой устройств при разделении заготовки вдоль линии разделения. Система устройств состоит из направляющей рейки, расположенной на направляющей рейке с возможностью сдвига пильной головки, и моторизованного механизма подачи для перемещения пильной головки вдоль направляющей рейки. Пильная головка включает в себя полотно пилы, которое закреплено на стойке пилы и приводится в движение вокруг оси вращения. Стойка пилы изготовлена с возможностью поворота (наклона) вокруг оси качания. Движение наклона стойки пилы вокруг оси качания изменяет глубину резки полотном пилы в заготовке. Вращение полотна пилы вокруг оси вращения осуществляют с помощью приводного двигателя, а движение наклона стойки пилы осуществляют с помощью двигателя поворота. Приводной двигатель и двигатель поворота расположены в корпусе для оборудования пильной головки. Моторизованное устройство подачи включает в себя направляющие салазки и двигатель подачи, который размещается в корпусе для оборудования пильной головки. Пильная головка установлена на направляющих салазках и выполнена с возможностью сдвига вдоль направляющей рейки в направлении подачи посредством двигателя подачи. В корпусе для оборудования, помимо двигателей, предусмотрено контрольное устройство для управления пильной головкой и моторизованным устройством подачи.
Известный способ управления системой устройств при разделении заготовки содержит последовательность из трех этапов, которые выполняют друг за другом. На первом этапе способа стойку пилы наклоняют на некоторый угол наклона, который соответствует глубине резки для частичного разреза. На втором этапе способа пильную головку продвигают вдоль направляющей рейки вдоль направления подачи "туда" до первой конечной точки линии разделения. На третьем этапе способа пильную головку продвигают вдоль направляющей рейки вдоль направления подачи "обратно" до второй конечной точки линии разделения. Три этапа способа повторяют до тех пор, пока не будет достигнута желаемая глубина резки разделяющего разреза. По меньшей мере на отдельных этапах автоматизированный способ требует, чтобы оператор вводил конечные точки разделительной линии, но не содержит никакой информации, как оператор задает координаты конечных точек.
Сущность изобретения
Задача настоящего изобретения состоит в разработке способа управления системой устройств при разделении заготовки вдоль линии разделения, так чтобы при реализации способа оператору было проще определять конечные точки.
Эту задачу согласно изобретению решают с помощью упомянутого в начале способа управления системой устройств при разделении заготовки вдоль линии разделения посредством признаков независимого пункта формулы изобретения. Предпочтительные усовершенствования представлены в зависимых пунктах формулы изобретения.
Согласно изобретению предусматривается, что пильную головку располагают на направляющей рейке в стартовом положении и вводят первую частичную длину от стартового положения до первой конечной точки разделительной линии. Оператор может разместить пильную головку на направляющей рейке в произвольном стартовом положении между первой и второй конечными точками разделительной линии. Расчет координат первой конечной точки осуществляют в контрольном устройстве системы устройств, исходя из первой частичной длины (первой части длины). При этом, помимо модуля, первая часть длины включает в себя также и направление, в котором первую часть длины измеряют, начиная от стартового положения.
В качестве стартового положения в случае качающейся стойки пилы можно использовать, например, положение оси качания стойки пилы, так как положение оси качания в направлении подачи остается неизменным во время движения наклона. Стартовое положение, а также положительное и отрицательное направления относительно стартового положения обозначают маркировкой на пильной головке. Оператор измеряет расстояние от стартового положения до первой конечной точки и задает (вводит) модуль вместе с направлением, в котором замеряют первую часть длины.
В предпочтительном варианте вводят всю длину от первой конечной точки до второй конечной точки разделительной линии. На основании первой части длины и общей длины в контрольном устройстве системы устройств выполняется расчет положений конечных точек разделительной линии. Вводить всю длину целесообразно, если совокупная длина разделяющего разреза определена в задании на обработку. Если общая длина известна, то необходимо измерить только часть длины между стартовым положением пильной головки и одной из конечных точек. Сложность измерения уменьшается в сравнении с задачей на обработку, при которой необходимо измерять две длины.
В альтернативном предпочтительном варианте вводят вторую часть длины от стартового положения до второй конечной точки разделительной линии. При этом, помимо модуля, вторая часть длины включает в себя также и направление, в котором вторую часть длины измеряют, начиная от стартового положения. На основании первой и второй части длины (модуль и направление) в контрольном устройстве системы устройств выполняется расчет положений конечных точек разделительной линии. Ввод второй части длины целесообразен тогда, когда общая длина разделяющего разреза не установлена задачей на обработку, а измерение общей длины требует более значительных затрат.
В предпочтительном варианте исполнения оператор вводит через управляющее устройство первую часть длины, вторую часть длины и/или общую длину разделительной линии. Ввод значений длины вручную обладает тем преимуществом, что для измерения дистанции оператор может использовать любое измерительное устройство.
В альтернативном предпочтительном варианте исполнения первую часть длины, вторую часть длины и/или общую длину разделительной линии вводят через сенсорное устройство (посредством датчиков). Применение сенсорного устройства обладает тем преимуществом, что измеренные значения длины можно передать непосредственно с сенсорного устройства на контрольное устройство системы устройств, благодаря чему снижается риск ошибок при передаче.
Особо предпочтительно передавать первую часть длины, вторую часть длины и/или общую длину разделительной линии с сенсорного устройства на систему устройств через коммуникационное соединение. Оператор измеряет одну или несколько длин с помощью сенсорного устройства и устанавливает коммуникационное соединение между сенсорным устройством и контрольным устройством системы устройств. Поскольку передача значений длины осуществляется через коммуникационное соединение, сенсорное устройство можно применять на нескольких системах устройств.
Примеры исполнения
Ниже дано пояснение примеров исполнения изобретения на основании чертежа. Чертеж необязательно отображает примеры исполнения строго масштабно, напротив, чертеж (там, где он служит пояснению) выполнен в схематическом и/или несколько искаженном виде. Что касается дополнений к положениям, непосредственно видимым из чертежа, то дана ссылка на соответствующий уровень техники. При этом следует учитывать, что возможны разнообразные модификации и изменения, касающиеся формы и подробностей формы исполнения, без отклонения от общей идеи изобретения. Признаки изобретения, изложенные в описании, в чертеже, а также в формуле изобретения, могут быть существенны для варианта исполнения изобретения как каждый по отдельности, так и в произвольном сочетании. Кроме того, изобретение охватывает все сочетания по меньшей мере двух признаков, изложенных в описании, чертеже и/или в формуле изобретения. Общая идея изобретения не ограничена точной формой или подробностями показанной и описанной ниже предпочтительной формы исполнения и не лимитирована объектом, который был бы более ограничен, чем заявленный в формуле изобретения объект. В случае указанных диапазонов параметров значения, лежащие в пределах названных границ, также следует считать изложением граничных значений, необходимо их произвольное применение и испрашивание. В целях простоты изложения ниже для идентичных или сходных деталей, или же для деталей с идентичной или сходной функцией применяют одинаковые обозначения.
Представлены:
ФИГ. 1 - система устройств на основании направляющих, состоящая из направляющей рейки, пильной головки, расположенной на направляющей рейке с возможностью сдвига, и моторизованного механизма подачи для перемещения пильной головки вдоль направляющей рейки;
ФИГ. 2 - система устройств ФИГ. 1 при создании разделяющего разреза между первой и второй конечной точкой без перекрываний; и
ФИГ. 3 - система устройств ФИГ. 1 при создании разделяющего разреза между первой и второй конечной точкой с перекрываниями.
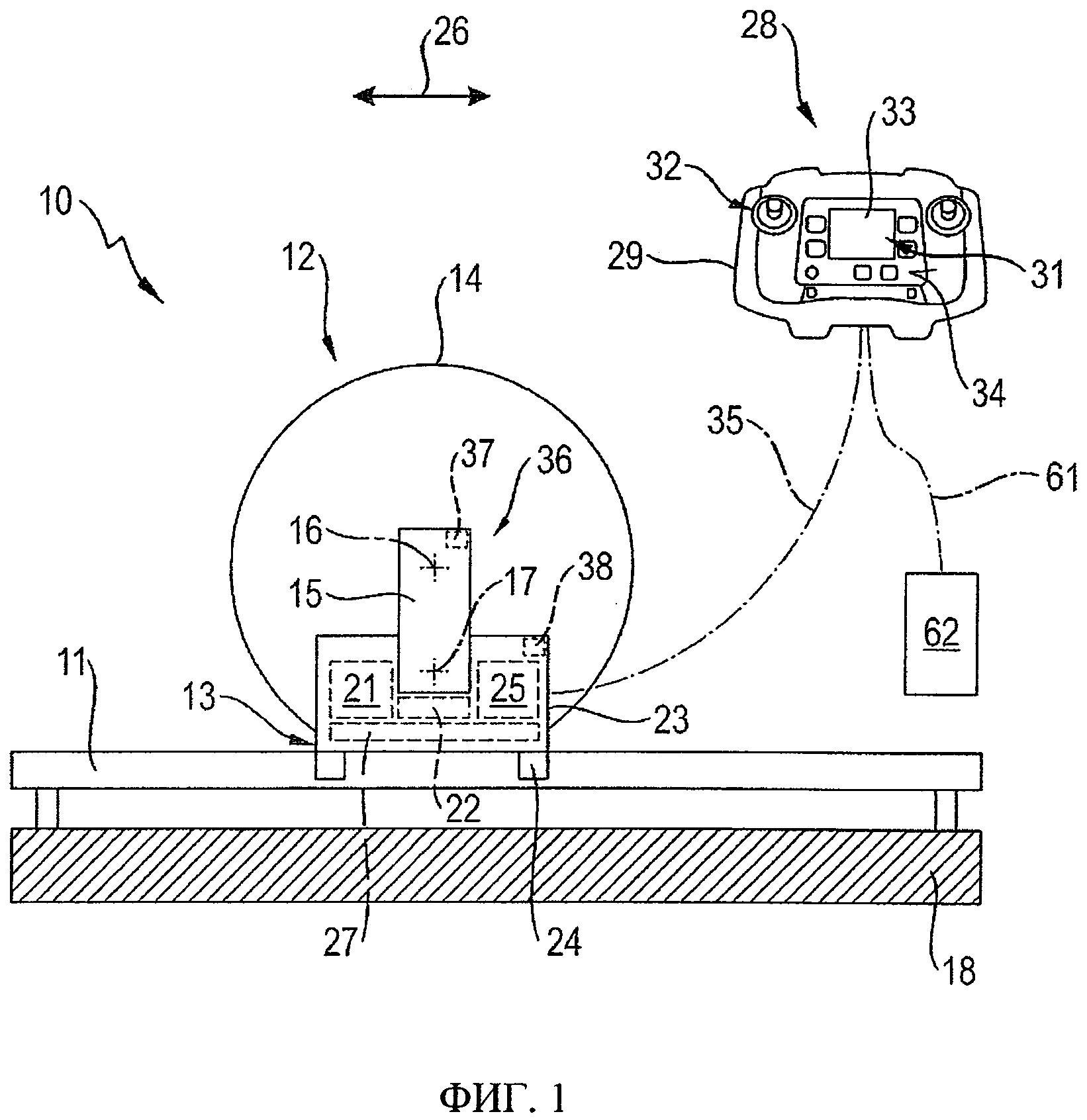
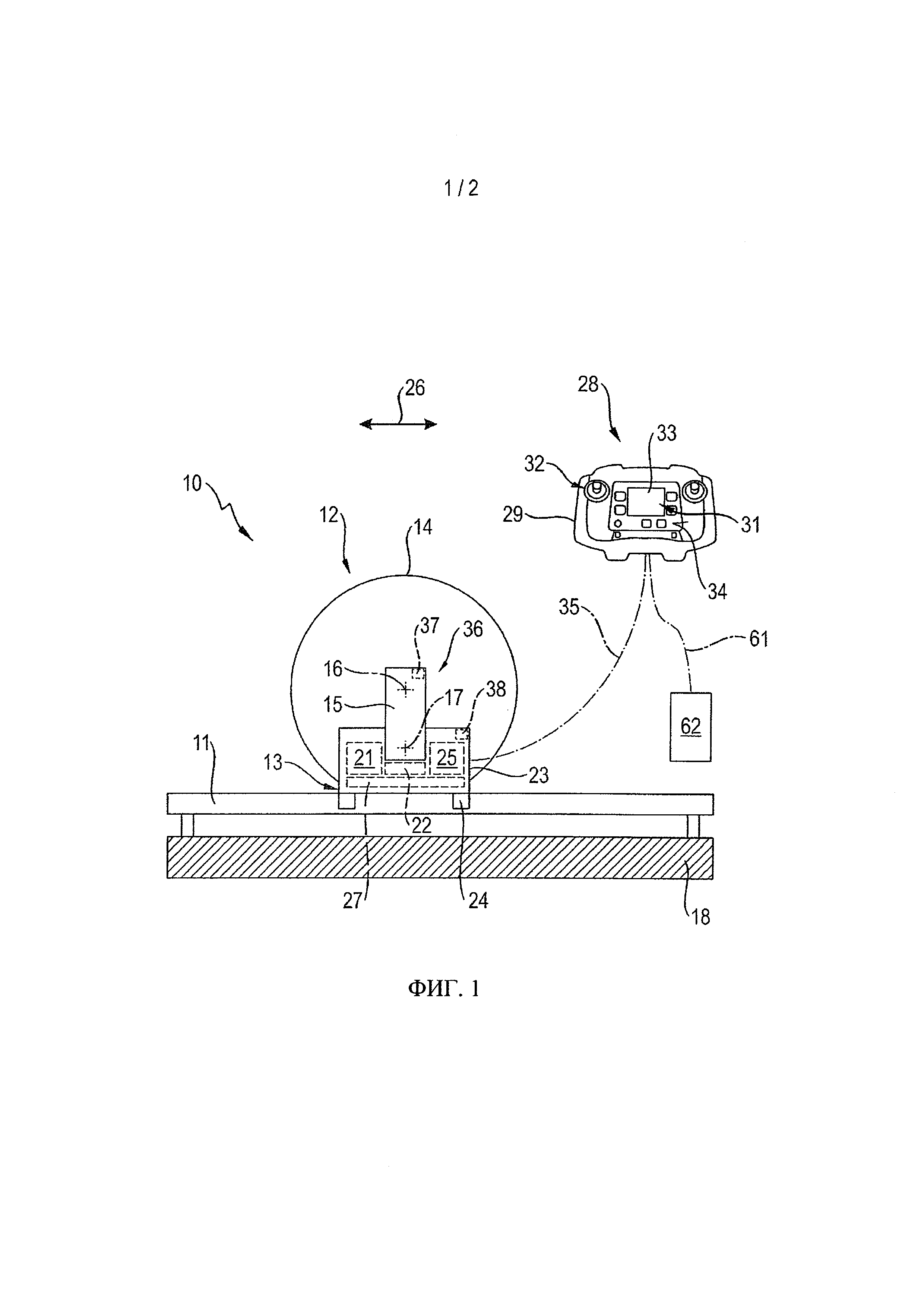
ФИГ. 1 демонстрирует схематическое изображение системы устройств 10 на основе направляющих, состоящей из направляющей рейки 11, расположенного на направляющей рейке 11 с возможностью сдвига рабочего инструмента 12 и моторизованного механизма подачи 13 для перемещения рабочего инструмента 12 вдоль направляющей рейки 11.
Рабочий инструмент выполнен в виде пильной головки 12 и включает в себя полотно пилы 14, которое закреплено на стойке пилы 15 и приводится в движение вокруг оси вращения 16. Стойка пилы 15 изготовлена с возможностью поворота(наклона) вокруг оси качания. Движение наклона стойки пилы 15 вокруг оси качания 17 изменяет глубину резки полотном пилы 14. Угол наклона стойки пилы 15 с диаметром полотна пилы 14 определяет, насколько глубоко полотно пилы 14 погружается в подлежащую обработке заготовку 18. В качестве альтернативы движению наклона стойки пилы 15 вокруг оси качания 17 можно перемещать стойку пилы 15, например, с помощью линейного привода или другого приводного устройства. Для защиты оператора полотно пилы 14 может быть окружено защитным кожухом, который закрепляют на раме пилы 15 с помощью держателя кожуха полотна 9.
Вращение полотна пилы 14 вокруг оси вращения 16 осуществляют с помощью приводного двигателя 21, а движение наклона стойки пилы 15 вокруг оси качания 17 осуществляют с помощью двигателя для качания 22. Приводной двигатель 21 и двигатель поворота 22 расположены в корпусе 23 для оборудования пильной головки 12. Моторизованное устройство подачи 13 включает в себя направляющие салазки 24 и двигатель подачи 25, который размещается в корпусе для оборудования 23. Пильная головка 12 закреплена на направляющих салазках 24 и выполнена с возможностью сдвига вдоль направляющей рейки 11 в направлении подачи 26 посредством двигателя подачи 25. В корпусе для оборудования 23, помимо двигателей 21, 22, 25, размещено контрольное устройство 27 для управления пильной головкой 12 и моторизованным устройством подачи 13.
Управление системой устройств 10 осуществляют посредством управляющего устройства 28, которое в представленной форме исполнения ФИГ. 1 выполнено как устройство дистанционного управления. Устройство дистанционного управления 28 включает в себя корпус устройства 29, расположенное в корпусе устройства 29 второе контрольное устройство 31, а также пульт управления 32 и индикаторное устройство 33, которые расположены на верхней стороне 34 корпуса устройства 29. Второе контрольное устройство 31 через коммуникационное соединение 35 соединено с первым контрольным устройством 27. Коммуникационное соединение 35 выполнено как кабельное соединение или как беспроводное коммуникационное соединение, например, в форме инфракрасного соединения, соединения Bluetooth, WLAN или Wi-Fi. Помимо указанных технологий беспроводного соединения для передачи данных годятся все уже известные и перспективные технологии беспроводного соединения.
Для наблюдения за системой устройств 10 и за процессом обработки у системы устройств 10 имеется сенсорное устройство 36 с несколькими сенсорными элементами (датчиками). Первый сенсорный элемент 37 выполнен как датчик угла наклона, а второй сенсорный элемент 38 - как датчик перемещения. Датчик угла наклона 37 измеряет мгновенный угол наклона стойки пилы 15. Угол наклона стойки пилы 15 с диаметром полотна пилы 14 определяет, насколько глубоко полотно пилы 14 погружается в заготовку 18. Датчик перемещения 38 замеряет текущее положение пильной головки 12 на направляющей рейке 11. Результаты измерения с датчика угла наклона 37 и датчика перемещения 38 передаются на первое контрольное устройство 27.
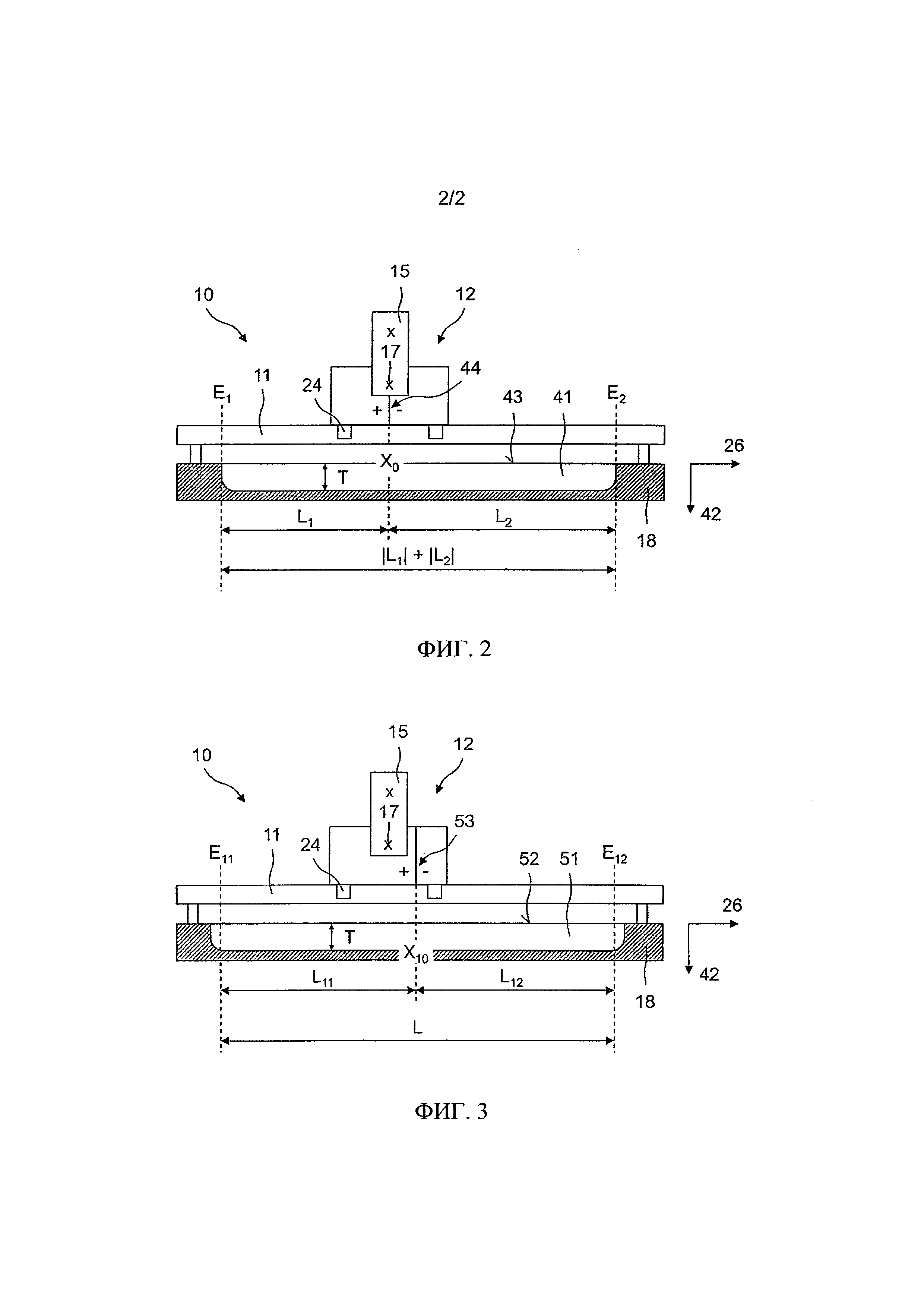
ФИГ. 2 демонстрирует систему устройств 10 с ФИГ 1 в первом варианте. С помощью системы устройств 10 в заготовке 18 создают разделяющий разрез 41. В направлении глубины 42 разделяющий разрез 41 характеризуется глубиной резки Т, а в направлении подачи 26 проходит вдоль разделительной линии 43 между первой конечной точкой E1 и второй конечной точкой Е2. Разделяющий разрез 41 создают несколькими частичными разрезами, пока не будет достигнута желательная глубина резки Т. В случае представленного на ФИГ. 2 разделительного разреза 41 на конечных точках E1, Е2 перекрывание невозможно, так что глубина разделительного разреза 41 на конечных точках Е1, Е2 меньше, чем глубина резки Т.
Пильную головку 12 с помощью направляющих салазок 24 размещают в стартовом положении Х0 на направляющей рейке. Стартовое положение Х0 пильной головки 12 находится между первой и второй конечной точкой E1, Е2 линии разделения и определяется положением оси качания 17 стойки пилы 15. Положение оси качания 17 в направлении подачи 26 во время движения наклона стойки пилы 15 вокруг оси качания 17 остается неизменным. Стартовое положение Х0, а также положительное и отрицательное направления относительно стартового положения Х10 обозначают маркировкой 44 на пильной головке.
Положения первой и второй конечной точки Е1, Е2 в направлении подачи 26 задают путем введения части длины. Расстояние от стартового положения Х0 до первой конечной точки Е1 задает первую часть длины L1, а расстояние от стартового положения Х0 до второй конечной точки Е2 задает вторую часть длины L2. Согласно маркировке 44 первую часть длины L1 замеряют в положительном направлении, а вторую часть длины L2 - в отрицательном направлении. Оператор измеряет первую и вторую часть длины L1, L2 и с помощью пульта управления 32 вводит результаты измерений частей длины L1, L2 вместе с направлениями частей длины в устройство дистанционного управления 28. Помимо частей длины L1, L2 оператор вводит в устройство дистанционного управления 28 желательную глубину Т разделяющего разреза 41, а также параметры устройства, как, например, диаметр полотна пилы 14, и подлежащей обработке заготовки. Кроме того, оператор определяет, должно ли перекрывание (прорез избыточной длины) иметь место в одной из конечных точек Е1, Е2, в обеих конечных точках Е1, Е2 или ни в одной из конечных точек Е1, Е2. В первом или втором контрольном устройстве 27, 31, на основании частей длины L1, L2, параметров устройства и прочей информации вырабатывают управляющие команды для выполнения разделяющего разреза 41. Разделяющий разрез 41 создают несколькими следующими друг за другом частичными разрезами в заготовке 18, пока не будет достигнута желаемая глубина резки Т.
ФИГ. 3 демонстрирует систему устройств 10 с ФИГ. 1 во втором варианте. С помощью системы устройств 10 в заготовке 18 создают разделяющий разрез 51. В направлении глубины 42 разделяющий разрез 51 характеризуется глубиной резки Т, а в направлении подачи 26 проходит вдоль разделительной линии 52 между первой конечной точкой Е11 и второй конечной точкой Е12. Конечные точки Е11, Е12 ФИГ. 3 отличаются от конечных точек Е1, Е2 ФИГ. 2 тем, что допускаются перекрывания, а разделяющий разрез 51 в конечных точках Е11, Е12 достигает глубины резки Т.
Пильную головку 12 с помощью направляющих салазок 24 размещают в стартовом положении Х10 на направляющей рейке. Стартовое положение Х10 пильной головки 12 находится между первой и второй конечной точкой Е11, Е12 линии разделения и определяется маркировкой 53 на корпусе устройства 23 пильной головки 12. Маркировка 53 указывает стартовое положение Х10, а также положительное направление и отрицательное направление, исходя из стартового положения Х10.
Положения конечных точек Е11, Е12 в направлении подачи 26 задают, вводя значение одной части длины (модуль и направление) и общей длины. Расстояние от стартового положения Х0 до первой конечной точки Е11 задает первую часть длины L11, а расстояние между первой и второй конечной точкой Е11, Е12 задает общую длину L. Из первой части длины L11, направления, в котором измеряют первую часть длины L1, и общей длины L в первом или во втором контрольном устройстве 27, 31 рассчитывают положения конечных точек Е11, Е12. Вместо общей длины L пользователь может ввести вторую часть длины L12 (модуль и направление) между стартовым положением Х10 и второй конечной точкой Е12. Общую длину L разделяющего разреза 51 получают как сумму модулей первой и второй частей длины |L11|+|L12|. Вводить общую длину L имеет смысл, если задана общая длина L разделяющего разреза 51, например, в случае проема в стене для двери высотой 2,30 м. Если известна общая длина L, то необходимо замерить только одну часть длины между стартовым положением Х10 пильной головки 12 и одной из конечных точек Е11, Е12.
Оператор может вручную ввести части длины L11, L12 или общую длину L разделяющего разреза 51 с помощью пульта управления 32. В качестве альтернативы система устройств может соединяться коммуникационным соединением 61 с сенсорным устройством 62 для измерения расстояний (см. ФИГ. 1). Оператор с помощью сенсорного устройства 62 измеряет одну из длин, и измеренная длина передается через коммуникационное соединение 61 на первое или второе контрольное устройство 27, 31 системы устройств. В случае формы исполнения ФИГ. 1 сенсорное устройство 62 соединено коммуникационным соединением 61 со вторым контрольным устройством 31.
Для измерения расстояний с помощью лазера на конечной точке, длину (расстояние до) которой измеряют, должна иметься отражающая и/или рассеивающая поверхность для лазерного луча. Измерение расстояний с помощью лазера можно поддерживать с помощью активной или пассивной цели. Еще в одном варианте сенсорное устройство 62 для измерения расстояний может быть интегрировано в систему устройств 10.
Режущая часть для сверлильной коронки
Применение многокомпонентной строительной растворной смеси на эпоксидноаминной основе
Забивающее устройство
Оптический узел с коническим зеркалом
Способ изготовления сплошного кольцевого сверла для колонковой сверлильной коронки
Способ крепления
Реакционноспособная смоляная композиция и ее применение
Смоляная смесь, строительный раствор из реактивной смолы, многокомпонентная система строительного раствора и их применение
Состав, образующий изолирующий слой, и его применение
Способ проверки свойств объекта в основе
Крепежный элемент
Распорный дюбель с распорным участком с прорезями
Смоляная смесь на основе смолы из сложных виниловых эфиров, строительный раствор из реактивной полимерной смолы, содержащий эту смесь, а также его применение
Способ управления системой устройств с рабочим инструментом и моторизованным устройством подачи

