Результат интеллектуальной деятельности: АВТОМАТИЗАЦИЯ БУРЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ НА ОСНОВЕ СТОХАСТИЧЕСКОЙ ТЕОРИИ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Углеводороды, такие как нефть и газ, как правило, добывают из подземных формаций, которые могут быть расположены на суше или в море. В большинстве случаев формации расположены на тысячи футов под поверхностью, а ствол скважины должен пересечь формацию перед добычей углеводородов. Бурение ствола скважины является трудоемким и требует наличия оборудования, а стоимость операции бурения увеличивается с увеличением продолжительности операции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые конкретные приведенные в качестве примера варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные чертежи.
На фиг. 1 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему бурения в соответствии с аспектами настоящего изобретения.
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему обработки информации в соответствии с аспектами настоящего изобретения.
На фиг. 3 представлена блок-схема, иллюстрирующая приведенную в качестве примера архитектуру управления для системы бурения в соответствии с аспектами настоящего изобретения.
На фиг. 4 представлена диаграмма, иллюстрирующая приведенный в качестве примера оптимальный управляющий входной сигнал в соответствии с аспектами настоящего изобретения.
Несмотря на то что варианты реализации настоящего изобретения были изображены, описаны и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, которые станут понятны специалистам в данной области техники, имеющим преимущества данного изобретения. Изображенные и описанные варианты реализации настоящего изобретения являются примерами и не ограничивают объем изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В контексте настоящего описания система управления информацией может содержать любые устройства или совокупность устройств, выполненных с возможностью вычисления, систематизации, обработки, передачи, получения, извлечения, создания, перенаправления, хранения, отображения, выдачи, обнаружения, записи, воспроизведения, управления или применения любой формы информации, оперативной информации или данных для бизнеса, научных целей, управления или других целей. Например, система обработки информации может являться персональным компьютером, сетевым устройством хранения данных или любым подходящим устройством, и может иметь разный размер, форму, производительность, функциональность и стоимость. Система управления информацией может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов, производящих обработку, таких как центральный процессор (ЦП) или логическое устройство управления аппаратным или программным обеспечением, постоянное запоминающее устройство ПЗУ и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы управления информацией могут включать одно или большее количество дисковых запоминающих устройств, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также с различными устройствами ввода и вывода (I/O), такими как клавиатура, мышь и монитор. Система управления информацией может также содержать одну или большее количество шин, выполненных с возможностью обеспечения обмена данными между различными компонентами аппаратного обеспечения. Она также может содержать одну или большее количество интерфейсных устройств, способных передавать один или большее количество сигналов на контроллер, привод или подобное устройство.
Для целей данного раскрытия машиночитаемый носитель может содержать любое устройство или совокупность устройств, способных хранить данные и/или команды в течение определенного периода времени. Читаемые компьютером носители могут включать, например, носитель данных, такой как запоминающее устройство с прямым доступом (например, жесткий диск или дискета), запоминающее устройство с последовательным доступом (например, магнитная лента), компакт-диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и/или флеш-память, но не ограничиваются ими; а также средства связи, такие как провода, оптоволокно, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или сочетание перечисленного ранее.
Иллюстративные варианты реализации настоящего изобретения более подробно описаны в настоящем описании. Для ясности в настоящем описании могут быть приведены не все признаки фактической реализации. Конечно, следует понимать, что в разработке любого такого фактического варианта осуществления для достижения конкретных целей реализации выполняют многочисленные реализации конкретных решений, которые будут отличаться от одной реализации к другой. Кроме того, следует иметь в виду, что такая разработка может быть сложной и трудоемкой, но, тем не менее, благодаря настоящему описанию, быть рутинным делом для специалиста в данной области техники.
С целью лучшего понимания настоящего изобретения приведены следующие примеры частных вариантов реализации. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты осуществления настоящего изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным или другим нелинейным стволам скважины в любом типе подземной формации. Варианты реализации могут быть применимы к нагнетательным скважинам, а также эксплуатационным скважинам, включая углеводородные скважины. Варианты осуществления могут быть реализованы с использованием приспособления, подходящего для тестирования, извлечения и отбора проб вдоль по секциям формации. Варианты осуществления могут быть реализованы посредством приспособлений, которые, например, могут быть переправлены через канал потока в колонне труб или с использованием кабеля, тросовой проволоки, колонны гибких труб, скважинного робота и т.п.
В контексте настоящего описания предполагается, что термин «соединены» или «соединен» обозначает непрямое либо прямое соединение. Таким образом, если первое устройство соединено со вторым устройством, такое соединение может быть осуществлено через прямое соединение или через непрямое механическое или электрическое соединение посредством других устройств и соединений. Аналогично термин "соединен с возможностью обмена данными" обозначает непрямое либо прямое коммуникационное соединение. Такое соединение может быть проводным или беспроводным соединением, таким как, например, Ethernet или локальная вычислительная сеть (LAN). Данные проводные или беспроводные соединения хорошо известны специалистам в данной области техники, поэтому они не будут подробно рассматриваться в данном документе. Таким образом, если первое устройство соединено со вторым устройством с возможностью обмена информацией, такое соединение может быть осуществлено через прямое соединение или через непрямое соединение с возможностью обмена данными посредством других устройств и соединений.
Современные операции бурения и добычи нефти требуют информации относительно параметров и условий в скважине. Существует несколько способов сбора скважинной информации, включая каротаж во время бурения (LWD) и измерения во время бурения (MWD). При каротаже во время бурения (LWD) данные обычно собирают во время процесса бурения, таким образом исключая необходимость удаления бурового снаряда для введения кабельного каротажного прибора. Следовательно, каротаж во время бурения (LWD) обеспечивает возможность оператору, осуществляющему бурение, вносить точные модификации или исправления в режиме реального времени для оптимизации производительности, при этом сводя к минимуму время простоя. Термин "измерения во время бурения (MWD)" обозначает измерение условий в скважине, относящихся к перемещению и расположению бурового снаряда во время продолжения бурения. Каротаж во время бурения (LWD) более сосредоточен на измерении параметров формации. Хотя существуют различия между измерениями во время бурения (MWD) и каротажем во время бурения (LWD), термины измерения во время бурения (MWD) и каротаж во время бурения (LWD) часто используют взаимозаменяемо. В настоящем описании термин "каротаж во время бурения (LWD)" будет использован с пониманием того, что этот термин включает сбор параметров формации и сбор информации, относящейся к перемещению и расположению бурового снаряда.
Настоящее изобретение описывает автоматизированную систему и способ управления для увеличения скорости проходки (ROP) для операции бурения. Скорость проходки (ROP) характеризуется скоростью, с которой буровое долото проникает через горную породу для продолжения ствола скважины. Увеличение скорости проходки (ROP) уменьшает время, необходимое для достижения целевой формации, и, следовательно, уменьшает стоимость бурения скважины. Хотя автоматизированная система и способ управления, описанные в настоящем описании, направлены на увеличение скорости проходки (ROP) операций бурения, система и способ управления могут быть приспособлены для оптимизации других аспектов операции бурения.
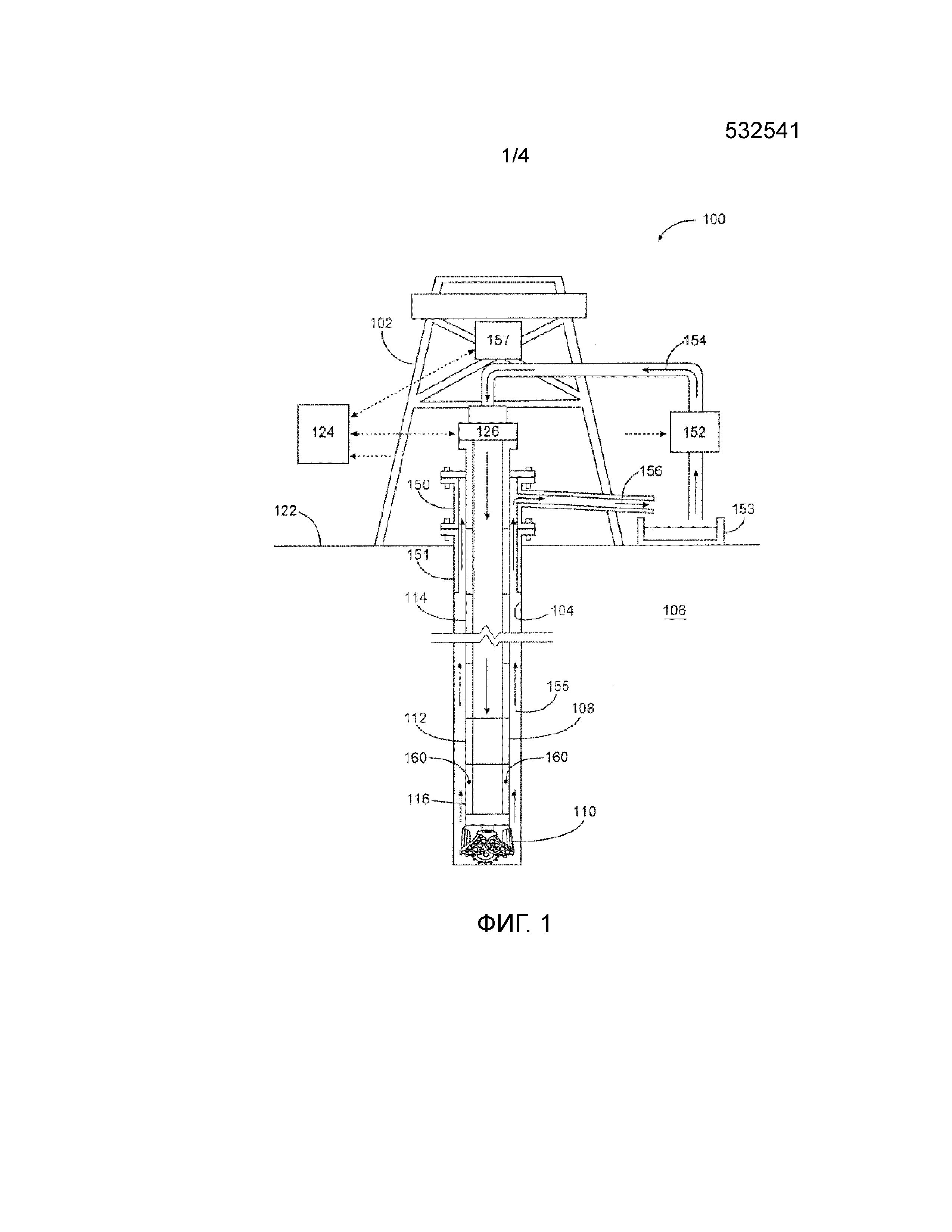
На фиг. 1 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 100 бурения в соответствии с аспектами настоящего изобретения. Система 100 бурения может содержать установку 102, установленную на поверхности 122, расположенную над стволом 104 скважины, находящимся в пределах подземной формации 106. Хотя поверхность 122 изображена в качестве суши на фиг. 1, буровая установка 102 некоторых вариантов реализации может быть расположена в море, причем поверхность 122 содержит бурильную платформу. Буровая установка может быть по меньшей мере частично расположена внутри ствола 104 скважины. Буровая установка может содержать бурильную колонну 114, забойное оборудование (BHA) 108, буровое долото 110 и верхний привод или стол 126 ротора.
Бурильная колонна 114 может содержать множество участков бурильной трубы, соединенных посредством резьбы. Забойное оборудование (BHA) 108 может быть присоединено к бурильной колонне 114, а буровое долото 110 может быть присоединено к забойному оборудованию (BHA) 108. Верхний привод 126 может быть присоединен к бурильной колонне 114 и передавать крутящий момент и вращение на бурильную колонну 114, обеспечивая вращение бурильной колонны 114. Крутящий момент и вращение, передаваемое на бурильную колонну 114, может быть передано на забойное оборудование (BHA) 108 и буровое долото 110, обеспечивая их вращение. Крутящий момент на буровом долоте 110 может быть именован крутящим моментом на долоте (TOB), а скорость вращения бурового долота 110 может быть выражена в оборотах в минуту (RPM). Вращение бурового долота 110 посредством верхнего привода 126 может обеспечивать взаимодействие бурового долота 110 с формацией 106 или ее забуривание в нее, и продолжение ствола 104 скважины. Возможны и другие конфигурации буровой установки, что будет понятно специалисту в данной области техники при ознакомлении с настоящим описанием.
Забойное оборудование (BHA) 108 может содержать приспособления, такие как элементы 116 каротажа во время бурения (LWD)/измерений во время бурения (MWD) и телеметрическую систему 112, и может быть присоединено к бурильной колонне 114. Элементы 116 каротажа во время бурения (LWD)/измерений во время бурения (MWD) могут содержать забойные инструменты, включая датчики 160. Во время бурения датчики 160 и другие инструменты в забойном оборудовании (BHA) 108 могут непрерывно или периодически отслеживать характеристики внутрискважинного бурения и скважинными условиями. Приведенные в качестве примера скважинные условия включают сопротивляемость, проницаемость формации и т.д. Приведенные в качестве примера характеристики внутрискважинного бурения содержат скорость вращения бурового долота 110, крутящий момент на долото (TOB) и усилие на буровое долото 110 (WOB). Данные, созданные элементом 116 каротажа во время бурения (LWD)/измерений во время бурения (MWD), могут храниться во время нахождения инструментов в скважине и могут быть извлечены на поверхность позже после извлечения бурильной колонны. В некоторых вариантах реализации данные, созданные элементом 116 каротажа во время бурения (LWD)/измерений во время бурения (MWD), могут быть переданы на поверхность с использованием телеметрической системы 112. Телеметрическая система 112 может обеспечивать обмен данными с поверхностью через различные каналы, включая проводные и беспроводные каналы обмена данными, а также гидроимпульсы через буровой раствор внутри ствола 104 скважины.
Бурильная колонна 114 может отходить по направлению вниз через устьевую колонную головку 150 в ствол 104 скважины. Устьевая колонная головка 150 может быть присоединена к оборудованию 151 устья скважины, а верхний привод 126 может быть присоединен к устьевой колонной головке 150. Оборудование 151 устья скважины может включать участок, проходящий в ствол 104 скважины. В некоторых вариантах реализации оборудование 109 устья скважины может быть закреплено внутри ствола 104 скважины с использованием цемента, и может взаимодействовать с устьевой колонной головкой 108 и другим оборудованием на поверхности, такое как противовыбросное оборудование (BOP) (не показано), для предотвращения освобождения чрезмерного давления от формации 106 и ствола 104 скважины на поверхности 103.
Во время операций бурения насос 152, расположенный на поверхности 122, может нагнетать буровой раствор со скоростью нагнетания (например, галлонов в минуту) из резервуара 153 текучей среды через верхний конец бурильной колонны 114. Скорость нагнетания на насосе 152 может соответствовать скважинному расходу, отличающемуся от скорости нагнетания вследствие потери текучей среды внутри формации 106. Как обозначено указателями 154, буровой раствор может протекать вниз внутренней части бурильной колонны 114, через буровое долото 106 и в кольцевое пространство 155 ствола скважины. Кольцевое пространство 155 ствола скважины образовано путем вращения бурильной колонны 114 и прикрепленного бурового долота 110 в стволе 104 скважины и определено как пространство между внутренней стенкой или диаметром ствола 104 скважины и наружной поверхностью или диаметром бурильной колонны 114. Кольцевое пространство может выходить за пределы ствола 104 скважины, через оборудование 151 устья скважины и в устьевую колонную головку 150. Устьевая колонная головка 150 может быть присоединена к проходу 156 для текучей среды, обеспечивающему сообщение по текучей среде между устьевой колонной головкой 150 и наземным резервуаром 153. Буровой раствор может выходить из кольцевого пространства 155 ствола скважины и протекать к наземному резервуару 153 через проход 156 для текучей среды.
В некоторых вариантах реализации по меньшей мере некоторые детали буровой установки, включая бурильную колонну 114, забойное оборудование (BHA) 108 и буровое долото 110, могут быть подвешены от буровой установки 102 на крюке 157 в сборе. Общая сила, воздействующая на крюк 157 в сборе по направлению вниз, может быть именована нагрузкой на крюк. Нагрузка на крюк может соответствовать весу буровой установки, от которой отнята любая сила, уменьшающая вес. Приведенные в качестве примера силы включают трение вдоль стенки ствола 104 скважины и силы выталкивания на бурильную колонну 114, обусловленные ее погружением в буровой раствор. При контакте бурового долота 110 с нижней частью формации 106 формация 106 обеспечивает смещение некоторого веса буровой установки, и это смещение может соответствовать усилию на буровое долото (WOB) буровой установки. Крюк 157 в сборе может содержать индикатор веса, показывающий количество веса, подвешенного на крюке 157 в данный момент времени. В некоторых вариантах реализации крюк 157 в сборе может содержать лебедку, или отдельная лебедка может быть присоединена к крюку 157 в сборе, причем лебедка может быть использована для изменения нагрузки на крюк/усилия на буровое долото (WOB).
В некоторых вариантах реализации система 100 бурения может содержать блок 124 управления, расположенный на поверхности 122. Блок 124 управления может содержать систему обработки данных, реализующую систему управления или алгоритм управления для системы 100 бурения. Блок 124 управления может быть с возможностью обмена данными присоединен к одному или большему количеству элементов системы 100 бурения, включая насос 152, крюк 157 в сборе, элементы 116 каротажа во время бурения (LWD)/измерений во время бурения (MWD) и верхний привод 126. В некоторых вариантах реализации система или алгоритм управления может обеспечивать создание и передачу блоком 124 управления сигналов управления к одному или большему количеству элементов системы 100 бурения.
В некоторых вариантах реализации блок управления 124 может принимать входные сигналы от системы 100 бурения и выводить сигналы управления по меньшей мере частично на основании входных сигналов. Входные сигналы могут содержать данные от элементов каротажа во время бурения (LWD)/измерений во время бурения (MWD), включая скважинные условия и характеристики внутрискважинного бурения. Сигналы управления могут изменять один или большее количество параметров бурения системы 100 бурения. Приведенные в качестве примера параметры бурения содержат скорость вращения и крутящий момент верхнего привода 126, нагрузку на крюк, скорость нагнетания насоса 152 и т.д. Сигналы управления могут быть направлены к элементам системы 100 бурения в целом, или к приводам или другим управляемым элементам, содержащимся в элементах. Например, верхний привод 126 может содержать привод, посредством которого обеспечивается управление крутящим моментом и вращением, передаваемым на бурильную колонну 114. Аналогично, крюк 157 в сборе может содержать привод, присоединенный к лебедке в сборе, управляющей количеством веса, переносимым лебедкой, и, таким образом, нагрузкой на крюк. В некоторых вариантах реализации некоторые или все из управляемых элементов системы 100 бурения могут содержать ограниченные интегральные элементы управления или процессоры, выполненные с возможностью приема сигнала управления от блока 124 управления, и создавать частную команду к соответствующим приводам или другим управляемым механизмам.
Параметры бурения могут соответствовать характеристикам внутрискважинного бурения, например изменение параметра бурения изменяет характеристики внутрискважинного бурения, хотя изменения могут не быть идентичными вследствие динамических характеристик в скважине. Сигнал управления, отправленный к насосу 152, может изменять скорость нагнетания, с которой буровой раствор нагнетают в бурильную колонну 114, в свою очередь изменяя расход через буровую установку. Сигнал управления, отправленный к крюку 157 в сборе, может изменять нагрузку на крюк путем уменьшения веса буровой установки, переносимого лебедкой, что может приводить к изменению усилия на буровое долото (WOB) и крутящего момента на долото (TOB). Сигнал управления, отправленный к верхнему приводу, может изменять скорость вращения и крутящий момент, прикладываемый к бурильной колонне 114, что может приводить к изменению в крутящем моменте на долото (TOB) и скорость вращения бурового долота 110. Другие типы сигнала управления будут понятны специалисту в данной области техники при ознакомлении с настоящим описанием.
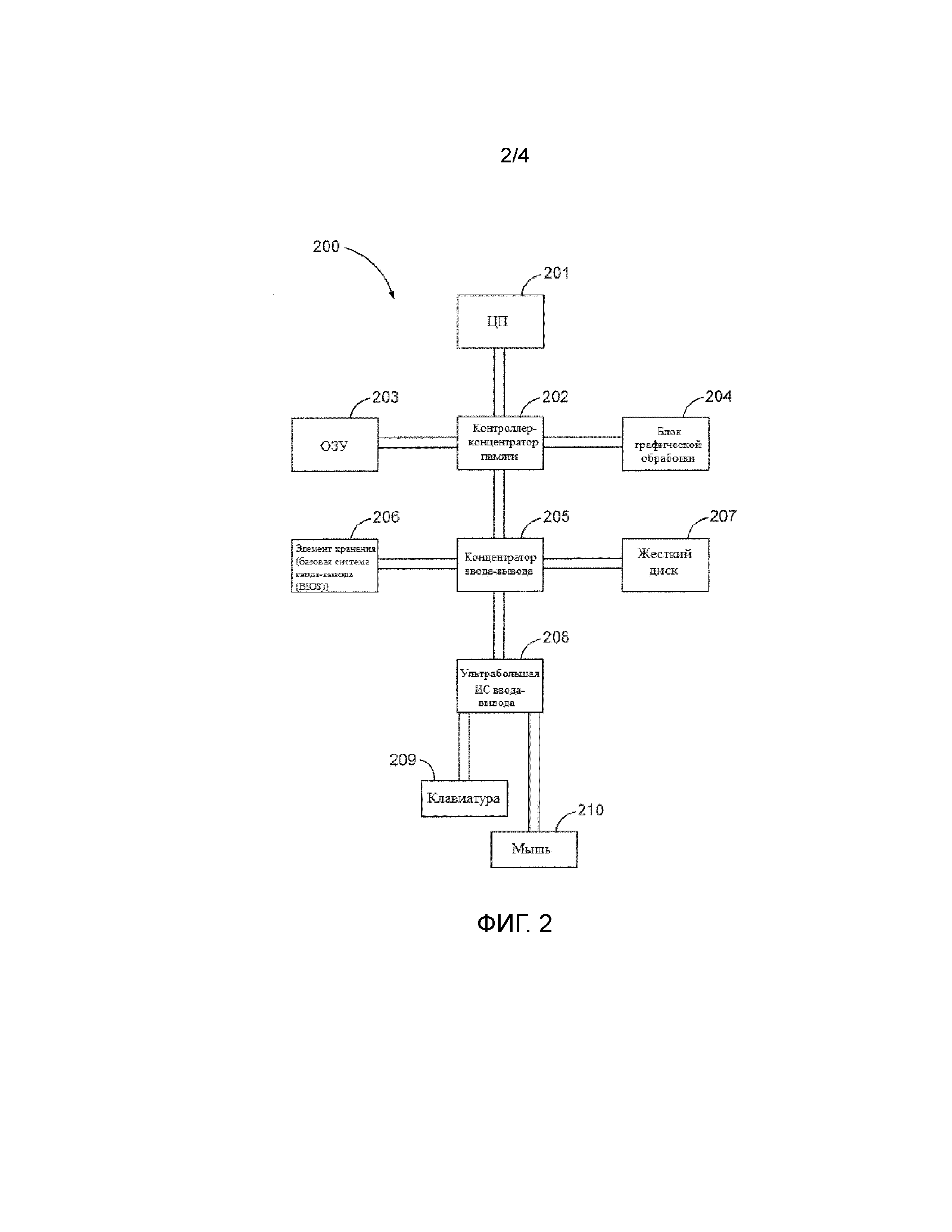
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 200 обработки информации в соответствии с аспектами настоящего изобретения. Система 200 управления информацией может применяться, например, в качестве части системы или блока управления буровым снарядом. Например, оператор буровой установки может взаимодействовать с системой обработки информации 200 для изменения параметров бурения или выдачи сигналов управления в буровое оборудование, соединенное с возможностью обмена данными с системой обработки информации 200. Система 200 управления информацией может содержать процессор или ЦП 201, соединенный (с возможностью обмена данными) с контроллером-концентратором запоминающего устройства или северным мостом 202. Контроллер-концентратор 202 запоминающего устройства может содержать контроллер запоминающего устройства для передачи информации на различные компоненты запоминающего устройства системы или от них в пределах системы управления информацией, такие как ОЗУ 203, элемент 206 запоминающего устройства и накопитель 207 на жестких дисках. Контроллер-концентратор 202 запоминающего устройства может быть соединен с ОЗУ 203 и графическим процессором 204. Контроллер-концентратор 202 запоминающего устройства также может быть соединен с контроллером-концентратором ввода-вывода или южным мостом 205. Концентратор 205 ввода-вывода соединен с элементами запоминающего устройства вычислительной системы, содержащей элемент 206 запоминающего устройства, который может содержать флэш-ПЗУ, которое содержит базовую систему ввода-вывода (BIOS) вычислительной системы. Концентратор 205 ввода-вывода также соединен с накопителем 207 на жестких дисках вычислительной системы. Концентратор 205 ввода-вывода также может быть соединен с ультрабольшой интегральной схемой 208 ввода-вывода, которая соединена с несколькими портами ввода-вывода вычислительной системы, включая порты для подключения клавиатуры 209 и мыши 210. Система 200 управления информацией может быть дополнительно соединена (с возможностью обмена данными) с одним или большим количеством элементов системы бурения посредством интегральной схемы 208.
Системы и способы, включающие аспекты настоящего изобретения, могут быть использованы для автоматического управления параметрами бурения для увеличения скорости проходки (ROP) системы бурения. В соответствии со следующим описанием приведенные в качестве примера системы и способы управления могут содержать системы стохастического управления для компенсации неопределенностей в динамических характеристиках системы бурения, приводящих к непрогнозируемым и случайным событиям на буровом долоте. Эти неопределенности содержат профиль горной породы перед буровым долотом, вибрации в буровом долоте, воздействие бурового раствора на профиль ствола скважины и угол, под которым буровое долото контактирует с горной породой. Непрогнозируемые и случайные события на буровом долоте уменьшают возможность управления буровым долотом с поверхности и уменьшают общую скорость проходки (ROP) системы бурения.
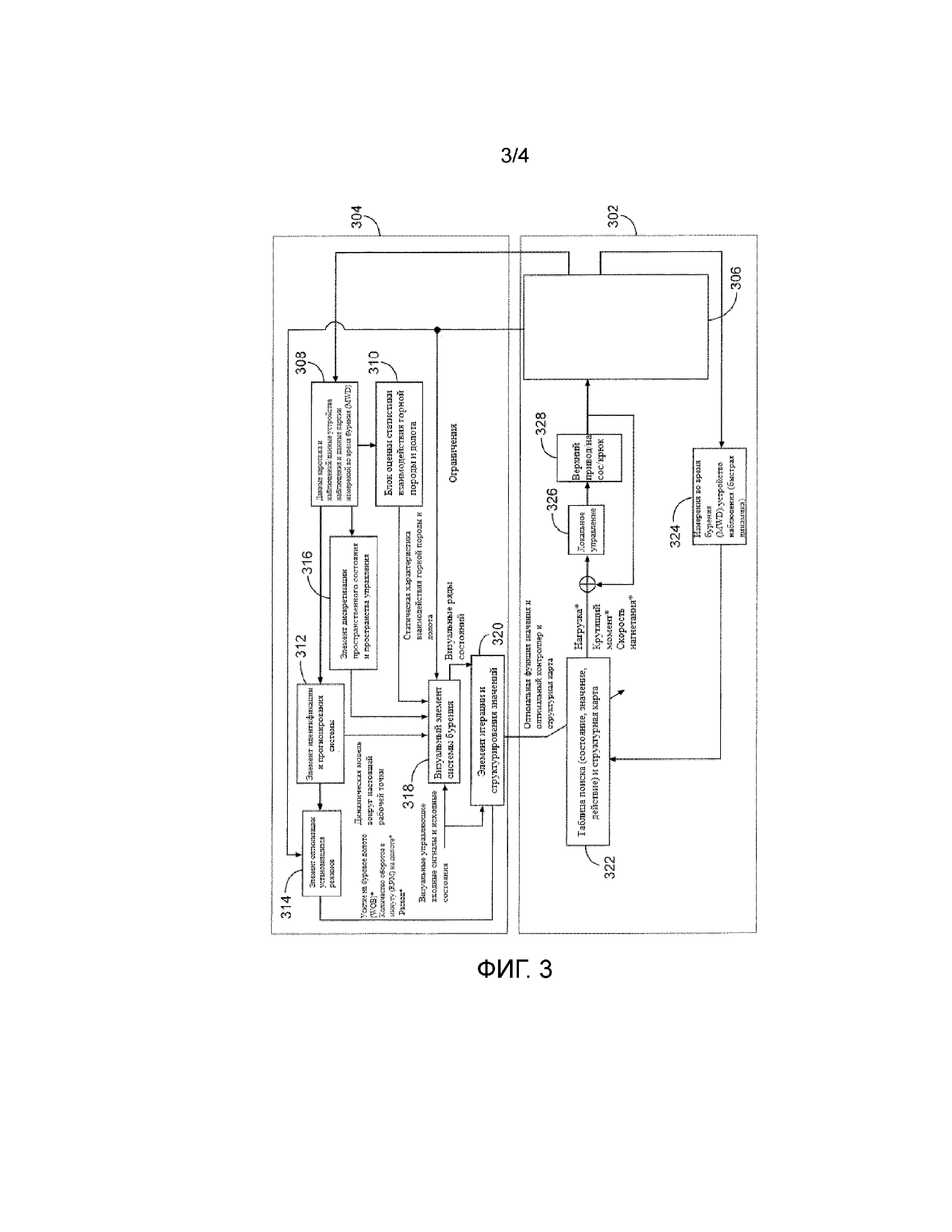
На фиг. 3 представлена блок-схема приведенной в качестве примера архитектуры 300 управления для системы бурения в соответствии с аспектами настоящего изобретения. Архитектура 300 управления может быть создана, расположена и/или реализована в одной или большем количестве систем обработки данных на буровой площадке или за пределами буровой площадки. Архитектура 300 управления может содержать оперативно доступный участок 302 и полуавтономный участок 304. Оперативно доступный участок 302 может характеризоваться обработкой входных сигналов от системы бурения 306 в режиме реального времени или в режиме, близком к реальному времени, для создания сигналов управления для систем 306 бурения с использованием режима управления, созданного полуавтономным участком 304. Полуавтономный участок 304 может быть характеризован вычислительно-трудоемкими этапами обработки для создания режима управления, причем этапы обработки осуществляются периодически после приема скважинных данных. Использование оперативно доступного участка 302 и полуавтономного участка 304 создает вычислительно-сложную архитектуру 300 управления, которая существенно не замедляет скорости контроллера, работающего в режиме реального времени.
В некоторых вариантах реализации полуавтономный участок 304 может адаптивно моделировать систему 306 бурения с использованием данных партии от элементов каротажа во время бурения (LWD)/измерений во время бурения (MWD) системы 306 бурения. Модель системы 306 бурения может содержать низкоразмерную модель в пространственном состоянии. В настоящем описании модель в пространственном состоянии может содержать математическую модель системы бурения с набором переменных входного сигнала, выходного сигнала и состояния, соотносящихся дифференциальными уравнениями первого порядка. Например, модель может быть выведена из основных принципов физики на основании подхода, использующего данные от системы 306 бурения, а также данные от других скважин с подобными физико-механическими свойствами горных пород. Непрогнозируемые и случайные события на буровом долоте могут быть учтены как гауссовый шум в модели.
Входные сигналы модели могут содержать параметры бурения, такие как крутящий момент на верхнем приводе, скорость нагнетания насоса и нагрузка на крюк, приводящие к изменениям в скорости проходки (ROP) буровой установки. Выходные сигналы модели могут содержать характеристики внутрискважинного бурения, такие как усилие на буровое долото (WOB), крутящий момент на долото (TOB), скорость вращения на буровое долото и расход через буровую установку. Переменные состояния могут содержать динамические характеристики системы 306 бурения, такие как динамические характеристики потока текучей среды, перемещение бурильной колонны, динамика электризации двигателя верхнего привода и т.д. Приведенная в качестве примера формула модели пространственного состояния показана в Уравнении (1), где x соответствует состоянию модели, u соответствует входным сигналам, v соответствует соотношению неопределенность/шум в модели, f соответствует динамической модели системы бурения и x• соответствует выходному сигналу.
Уравнение (1): 
Следует отметить, что параметры модели соответствуют медленно изменяющимся динамическим характеристикам, таким как износ долота, изменение формации, и, таким образом их изменения происходят медленно. Таким образом, настоящая модель может быть использована для прогнозирования будущих событий на будущем промежутке времени. Модель может быть обновлена со временем по мере получения новых данных от системы 306 бурения.
Полуавтономный участок 304 может принимать данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений от системы 306 бурения. Данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений могут содержать скважинные условия, характеристики внутрискважинного бурения, динамические характеристики и данные наблюдений, включая усилие на буровое долото (WOB), крутящий момент на долото (TOB), скорость вращения на буровом долоте, сопротивляемость формации, проницаемость формации, данные о текучей среде формации и т.д., но не ограничиваясь ими. Данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений могут быть созданы и накоплены в скважинных элементах каротажа во время бурения (LWD)/измерений во время бурения (MWD) системы 306 бурения и периодически извлечены на поверхность. Например, данные могут храниться в скважинном носителе памяти, присоединенном к элементам каротажа во время бурения (LWD)/измерений во время бурения (MWD), и могут быть скачаны или извлечены при извлечении носителя памяти на поверхность. В других вариантах реализации данные могут быть перемещены в качестве командного файла через скважинную телеметрическую систему с использованием проводного соединения, беспроводного соединения, оптоволоконного соединения или гидроимпульсов.
Полуавтономный участок 304 может содержать блок 310 оценки статистики взаимодействия горной породы с долотом, принимающий по меньшей мере части данных 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений. Статистика взаимодействия горной породы с долотом может выражать неопределенные и случайные события на буровом долоте, характеризующиеся взаимодействием между буровым долотом и горной породой перед буровым долотом. Блок 310 оценки может принимать данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений и оценивать статистику взаимодействия горной породы и долота. В некоторых вариантах реализации измерения усилия на буровое долото (WOB) и крутящего момента на долото (TOB) из данных 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений могут быть получены на блоке 310 оценки, который заем оценивает статистику взаимодействия горной породы и долота для определения параметров гауссового шума, соответствующего непрогнозируемым и случайным событиям на буровом долоте.
В некоторых вариантах реализации модель системы 306 бурения может быть создана в элементе 312 идентификации системы полуавтономного участка 304. Элемент 312 идентификации системы может принимать данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений и использовать статистические способы для создания математической модели системы бурения 306, соответствующей данным 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений. В частности, элемент 308 идентификации системы может учитывать фактические измерения в данных 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений путем создания модели системы 306 бурения, имеющую наибольшую статистическую вероятность создания данных 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений. Как описано ранее модель может содержать модель пространственного состояния, выведенную из основных принципов физики на основании способа.
Модель может быть получена от элемента 312 идентификации системы на элементе 314 оптимизации установившихся режимов. Элемент 314 оптимизации установившихся режимов может дополнительно принимать ограничения системы 306 бурения. Ограничения могут соответствовать физическим ограничениям системы 306 бурения, включая максимальное количество оборотов в минуту (RPM) верхнего привода, максимальный крутящий момент на верхнем приводе, максимальную скорость нагнетания на насосе, максимальную нагрузку на крюк и т.д., и могут быть вычислены, например, на основании известных механических характеристик системы 306 бурения. Ограничения могут быть использованы в сочетании с моделью из элемента 312 идентификации системы для определения максимально достижимой скорости проходки (ROP) для системы 306 бурения в ее настоящем состоянии. Максимальная достижимая скорость проходки (ROP) может соответствовать оптимальным значениям усилия на буровое долото (WOB), скорости вращения на буровом долоте и расхода, которые элемент 314 оптимизации установившихся режимов 314 может вычислять и выводить.
В некоторых вариантах реализации данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений могут также быть получены на элементе 316 входного сигнала и пространственного состояния. Элемент 316 может вычислять возможные входные сигналы и состояния модели пространственного состояния, созданной элементом 312 идентификации системы. В частности, элемент 316 может принимать данные 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений и определять настоящие эффективные диапазоны входных сигналов и состояний, которые являются возможными с учетом фактических измерений в данных 308 партии каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений. Настоящие эффективные диапазоны могут без ограничения содержать диапазон крутящего момента на верхнем приводе, диапазон нагрузок на крюк и диапазон физических динамических состояний, таких как скорость вращения бурового долота, которые могут предоставить измеренное усилие на буровое долото (WOB), крутящий момент на долото (TOB), скорость вращения бурового долота и расход из данных 308 каротаж во время бурения (LWD)/измерения во время бурения (MWD)/данные наблюдений. Настоящие эффективные диапазоны входных сигналов и состояний могут быть совмещены для образования входного сигнала и пространственного состояния для модели. В некоторых вариантах реализации элемент 316 дополнительно может дискретизировать входной сигнал и пространственное состояние для упрощения и уменьшения будущих вычислений, использующих входной сигнал и пространственное состояние, в соответствии со следующим описанием.
Архитектура 300 управления может дополнительно содержать визуальный элемент 318 системы бурения. Визуальный элемент 318 системы бурения может получать модель от элемента 312 идентификации системы, статистику взаимодействия горной породы и долота от блока 310 оценки статистики взаимодействия горной породы и долота, ограничений от системы 306 бурения и дискретизированного входного сигнала и пространственного состояния от элемента 316 входного сигнала и пространственного состояния. Визуальный элемент 318 системы бурения может моделировать модель с ограничениями системы 306 бурения с использованием различных управляющих входных сигналов и исходных состояний, которые вводят в визуальный элемент 318 системы бурения. Управляющие входные сигналы и исходные состояния, введенные в визуальный элемент 318 системы бурения, могут быть ограничены дискретизированным входным сигналом и пространственным состоянием от элемента 316 входного сигнала и пространственного состояния. В некоторых вариантах реализации управляющие входные сигналы могут включать различные значения для параметров бурения (например, нагрузки на крюк, скорость нагнетания, крутящий момент/скорость вращения на верхнем приводе), а результаты моделирования могут являться усилием на буровое долото (WOB), скоростью вращения бурового долота и расходом, соответствующими управляющими входными сигналами в исходных состояниях. Моделирование может дополнительно идентифицировать полученное усилие на буровое долото (WOB), скорость вращения бурового долота и расход за единицу времени для значений управляющего входного сигнала.
Данные моделирования от визуального элемента 318 системы бурения могут быть переданы к элементу 320 итерации и структурирования значений. Элемент 320 итерации и структурирования значений может содержать функцию стоимости, содержащую квадратичную функцию ошибки слежения между оптимальными значениями усилия на буровое долото (WOB), скорости вращения на буровом долоте и расхода, вычисленными элементом 314 оптимизации установившихся режимов, и значениями усилия на буровое долото (WOB), скорости вращения бурового долота и расхода в данных моделирования. Функция стоимости может быть составлена таким образом, что значение функции стоимости является наименьшим при наибольшем приближении данных моделирования к оптимальным значениям усилия на буровое долото (WOB), скорости вращения на буровом долоте и расхода, вычисленным элементом 314 оптимизации установившихся режимов, то есть, скорость проходки (ROP) наивысшая при наименьшей функции стоимости. Приведенная в качестве примера функция стоимости изображена в Уравнении (2), где xi и xid выражают измеренное и требуемое значения состояние с порядковым номером i, соответственно; uj выражает входной сигнал с порядковым номером j; wis и wju выражают массы для состояний или входных сигналов; и N1 и N2 выражают размеры состояний и входных сигналов, соответственно.
Уравнение (2): C (x,u)=
Состояния могут содержать, например, скорость вращения, усилие на буровое долото (WOB), крутящий момент на долото (TOB) и расположение долота, осевую/вращательную скорость, ускорение и т.д.
Элемент 320 итерации и структурирования значений может вычислять функцию значения из данных моделирования. Функция значения может содержать среднее значение накопленных значений функции стоимости в динамике. В некоторых вариантах реализации исходная функция значения может быть вычислена из данных моделирования, а функция значения может быть итерирована до преобразования в оптимальную функцию значения, в которой содержится минимальная средняя функция стоимости в динамике. В качестве примера функция значения изображена далее в Уравнении (3), в котором E соответствует ожидаемому значению.
Уравнение (3): 
В этой конструкции уменьшение J(x) эквивалентно для уменьшения функции стоимости в динамике, т.е. для уменьшение разницы между измеренным и требуемым значением состояний, а также для уменьшения усилий управления. Следует отметить, что функции состояния, стоимости и значения имеют различные выражения для дискретного времени/непрерывного времени, дискретного пространства/непрерывного пространства. Уравнения (1)-(3) могут быть использованы в случае с непрерывным пространством и непрерывным временем.
В некоторых вариантах реализации оптимальная функция значения может быть использована для вычисления оптимального режима 322 управления для системы 306 бурения. В частности для каждого из дискретизированных состояний оптимальная функция значения может быть использована для вычисления оптимального управляющего входного сигнала, образующего оптимальное значение. Оптимальный управляющий входной сигнал может содержать один или большее количество параметров бурения для системы 306 бурения. Результаты могут быть сведены в таблицу поиска, содержащую дискретизированное состояние, оптимизированный управляющий входной сигнал и оптимальное значение для всех возможных дискретизированных состояний системы 306 бурения.
В некоторых вариантах реализации оптимальный режим 322 управления, сведенный в таблицу поиска, может быть получен в оперативно доступном участке 302. Сигналы управления для системы 306 бурения могут быть определены по меньшей мере частично на основании оптимального режима 322 управления. Например, оперативно доступный участок 302 может содержать устройство 324 наблюдения за перемещением системы бурения, оценивающее состояния системы 306 бурения с использованием данных измерений во время бурения (MWD) в реальном времени. Состояния, оцененные устройством 324 наблюдения за перемещением системы бурения, могут соответствовать состояниям в таблице поиска и может быть использованы для идентификации оптимального управляющего входного сигнала, соответствующего состояниям системы 306 бурения в реальном времени. Следует отметить, что идентификация оптимального управляющего входного сигнала от таблицы поиска является простой с точки зрения вычисления, обеспечивая возможность идентификации оптимального управляющего входного сигнала в режиме, приближенном к реальному времени, без значительных вычислений.
В некоторых вариантах реализации состояния, идентифицированные устройством 324 наблюдения за перемещением системы бурения, могут быть непрерывными, а не дискретизированными. Хотя непрерывное состояние может не равняться ни одному дикретизированному состоянию, может быть идентифицировано и выбрано ближайшее дискретизированное состояние. В других вариантах реализации структурная карта может быть вычислена в полуавтономном участке 304 посредством способов или интерполяций машинного самообучения, например, таким образом, что оптимальный режим управления для непрерывного состояния является сочетанием нескольких соседних дискретных состояний.
В изображенном варианте реализации оптимальный управляющий входной сигнал может содержать значения параметров бурения для системы 306 бурения. Значения параметров бурения могут быть приняты локальным контроллером 326, который может создавать сигналы управления с подачей к одному или большему количеству элементов 328, соответствующие значениям параметров бурения. В изображенном варианте реализации значения параметров бурения могут содержать значения нагрузки на крюк, крутящего момента верхнего привода и скорости нагнетания. Локальный контроллер 326 может создавать сигнал для обеспечения перемещения верхнего привода в системе 306 бурения от первого значения крутящего момента к значению крутящего момента из оптимального управляющего входного сигнала. Подобные электрические сигналы могут быть созданы для насоса и значения скорости нагнетания, и для крюка и значения нагрузки на крюк. Механизм обратной связи может содержаться для обеспечения точности сигналов управления, созданных локальным контроллером.
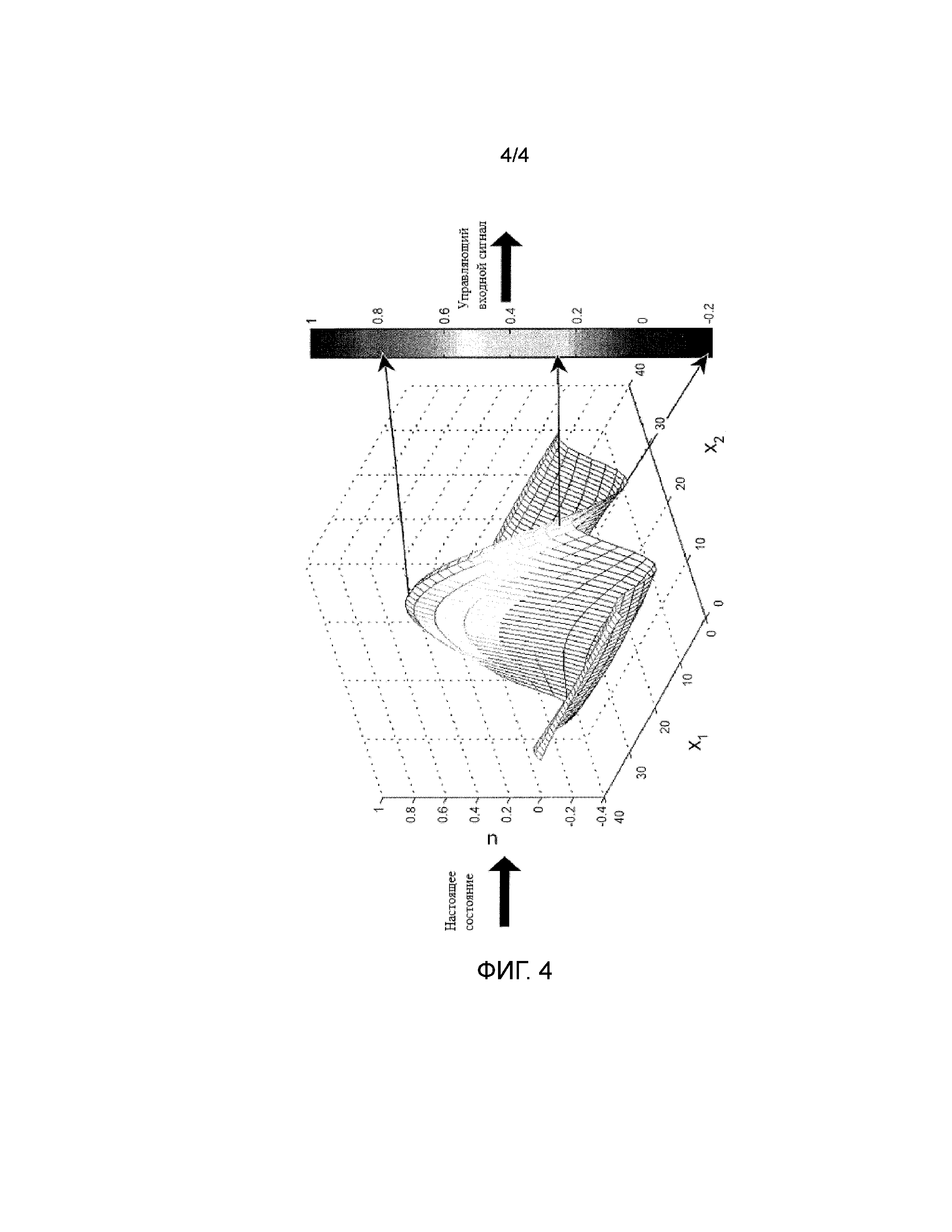
На фиг. 4 представлена диаграмма, иллюстрирующая приведенный в качестве примера оптимальный входной сигнал управления в соответствии с аспектами настоящего изобретения. В изображенном варианте реализации пространственное состояние имеет два измерения (x1 и x2), а оптимальный управляющий входной сигнал имеет одно измерение. Может быть получено настоящее состояние системы бурения в пространственном состоянии, причем настоящее состояние содержит значения в обоих измерениях оптимального управляющего входного сигнала. Значение оптимального управляющего входного сигнала может быть определено для дискретизированного пространства, соответствующего настоящему состоянию системы бурения. В изображенном варианте реализации, например, оптимальный управляющий входной сигнал может содержать 0,79, при значениях настоящего состояния для системы бурения, составляющих 20 и 18.
В соответствии с аспектами настоящего изобретения приведенный в качестве примера способ автоматизации бурения может содержать создание модели системы бурения по меньшей мере частично на основании первого набора скважинных измерений. Модель может принимать параметры бурения системы бурения в качестве входных сигналов. Скорость проходки для системы бурения может быть определена по меньшей мере частично на основании модели. Модель может быть моделирована с использованием первого набора значений для параметров бурения, а режим управления для системы бурения может быть вычислен по меньшей мере частично на основании скорости проходки и результатов моделирования. Сигнал управления, подаваемый к системе бурения, может быть создан по меньшей мере частично на основании режима управления.
В некоторых вариантах реализации создание модели системы бурения может содержать создание модели в пространственном состоянии системы бурения. Определение скорости проходки для системы бурения может содержать определение максимальной скорости проходки для системы бурения. В некоторых вариантах реализации параметры бурения системы бурения могут содержать нагрузку на крюк системы бурения, скорость нагнетания насоса системы бурения и значение крутящего момента верхнего привода системы бурения. Модель может создавать в качестве выходного сигнала по меньшей мере одно из усилия на буровое долото (WOB) системы бурения, скорости вращения бурового долота и расхода бурового раствора через систему бурения.
Создание сигнала управления с подачей к системе бурения может содержать создание сигнала управления, соответствующего по меньшей мере одному из параметров бурения. Максимальная скорость проходки для системы бурения может быть определена с использованием значений усилия на буровое долото (WOB), скорости вращения и расхода, соответствующих максимальной скорости проходки. В некоторых вариантах реализации моделирование модели с использованием первого набора значений для параметров бурения может содержать создание второго набора значений для усилия на буровое долото (WOB), скорости вращения и расхода, соответствующим первому набору значений. Вычисление режима управления для системы бурения может содержать сравнение второго набора значений со значениями усилия на буровое долото (WOB), скорости вращения и расхода, соответствующих максимальной скорости проходки.
В некоторых вариантах реализации вычисление режима управления для системы бурения дополнительно может содержать отслеживание отличий между вторым набором значений и значениями усилия на буровое долото (WOB), скорости вращения и расхода, соответствующих максимальной скорости проходки, с использованием функции стоимости, вычисление функции значения, соответствующей наименьшему среднему результату функции стоимости, вычисление управляющего входного сигнала для каждого из состояния системы бурения с использованием функции значения, и создание таблицы поиска, содержащей управляющие входные сигналы и состояния системы бурения. Создание сигнала управления с подачей к системе бурения по меньшей мере частично на основании режима управления может содержать создание оценки в реальном времени состояния системы бурения, выбор управляющего входного сигнала из таблицы поиска, соответствующего оцененному состоянию, и создание сигнала управления для системы бурения с использованием управляющего входного сигнала.
В некоторых вариантах реализации приведенный в качестве примера способ может дополнительно содержать прием второго набора скважинных измерений, создание второй модели системы бурения по меньшей мере частично на основании второго набора скважинных измерений, вычисление второго режима управления по меньшей мере частично на основании второй модели и создание второго сигнала управления с подачей к системе бурения по меньшей мере частично на основании второго режима управления.
В соответствии с аспектами настоящего изобретения приведенное в качестве примера устройство для автоматизации бурения может содержать процессор и запоминающее устройств, присоединенное к процессору. Запоминающее устройство может содержать набор инструкций, которые при исполнении процессором обеспечивают выполнение процессором создания модели системы бурения по меньшей мере частично на основании первого набора скважинных измерений. Модель может принимать параметры бурения системы бурения в качестве входных сигналов. Процессор может определять скорость проходки для системы бурения по меньшей мере частично на основании модели, и моделировать модель с использованием первого набора значений для параметров бурения. Процессор может также вычислять режим управления для системы бурения по меньшей мере частично на основании скорости проходки и результатов моделирования, и создавать сигнал управления с подачей к системе бурения по меньшей мере частично на основании режима управления.
В некоторых вариантах реализации набор инструкций, обеспечивающих создание модели системы бурения процессором, может дополнительно обеспечивать создание процессором модели в пространственном состоянии системы бурения. Набор инструкций, обеспечивающих определение процессором скорости проходки для системы бурения, может дополнительно обеспечивать определение процессором максимальной скорости проходки для системы бурения. В некоторых вариантах реализации параметры бурения системы бурения могут содержать нагрузку на крюк системы бурения, скорость нагнетания насоса системы бурения и значение крутящего момента верхнего привода системы бурения. Модель может создавать в качестве выходного сигнала по меньшей мере одно из усилия на буровое долото (WOB) системы бурения, скорости вращения бурового долота и расхода бурового раствора через систему бурения.
В некоторых вариантах реализации набор инструкций, обеспечивающих создание процессором сигнала управления с подачей к системе бурения, может дополнительно содержать создание процессором сигнала управления, соответствующего по меньшей мере одному из параметров бурения. Набор инструкций, обеспечивающих определение процессором максимальной скорости проходки для системы бурения, может дополнительно обеспечивать определение процессором значений усилия на буровое долото (WOB), скорости вращения и расхода, соответствующих максимальной скорости проходки. В некоторых вариантах реализации набор инструкций, обеспечивающих моделирование процессором модели с использованием первого набора значений для параметров бурения, может дополнительно обеспечивать создание процессором второго набора значений для усилия на буровое долото (WOB), скорости вращения и расхода, соответствующих первому набору значений.
В некоторых вариантах реализации процессор может вычислять режим управления для системы бурения дополнительно путем сравнения второго набора значений со значениями усилия на буровое долото (WOB), скорости вращения и расхода, соответствующими максимальной скорости проходки. Набор инструкций, обеспечивающих вычисление процессором режима управления для системы бурения, может дополнительно обеспечивать отслеживание процессором отличий между вторым набором значений и значениями усилия на буровое долото (WOB), скорости вращения и расхода, соответствующими максимальной скорости проходки, с использованием функции стоимости; вычислять функцию значения, соответствующую наименьшему среднему результату функции стоимости; вычислять управляющий входной сигнал для каждого состояния системы бурения с использованием функции значения; и создавать таблицу поиска, содержащую управляющие входные сигналы и состояния системы бурения.
В некоторых вариантах реализации набор инструкций, обеспечивающих создание процессором сигнала управления с подачей к системе бурения по меньшей мере частично на основании режима управления, дополнительно обеспечивает создание процессором оценки в реальном времени состояния системы бурения; выбор управляющего входного сигнала из таблицы поиска, соответствующего оцененному состоянию; и создание сигнала управления для системы бурения с использованием управляющего входного сигнала. В некоторых вариантах реализации набор инструкций может дополнительно обеспечивать прием процессором второго набора скважинных измерений; создание второй модели системы бурения по меньшей мере частично на основании второго набора скважинных измерений; вычисление второго режима управления по меньшей мере частично на основании второй модели и создание второго сигнала управления с подачей к системе бурения по меньшей мере частично на основании второго режима управления.
Таким образом, настоящее изобретение хорошо приспособлено для достижения целей и преимуществ, указанных, а также тех, которые свойственны ему. Конкретные варианты осуществления, раскрытые выше, являются лишь иллюстрацией, поскольку настоящее раскрытие может быть модифицировано и осуществлено различными, но эквивалентными способами, очевидными для специалистов в данной области техники, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, не налагаются ограничения в отношении подробностей разработки или конструкции, приведенных в данном документе, за исключением описанных в приведенной ниже формуле изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты реализации изобретения, раскрытые выше, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Также, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Применяемая в формуле изобретения форма единственного числа предполагает наличие одного или большего количества рассматриваемых элементов.
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости

