Результат интеллектуальной деятельности: ПЕРЕНОСНОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам и комплексам в области военной и специальной техники, предназначенной для дистанционной работы и мониторинга обстановки в опасных зонах химического и радиационного заражения в мирное время, и может быть использовано для решения задач разведки в военное время, применяться в режиме реального времени для фото- и видео-, химической и радиационной разведки местности, а также в ходе проведения аварийно-спасательных работ в условиях ЧС природного и техногенного характера.
Известен переносной беспилотный летательный аппарат многоцелевого назначения, который содержит беспилотный летательный аппарат и мобильный пульт контроля и управления. Беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с воздушными винтами с контролируемой частотой вращения. Диаметрально расположенные электродвигатели имеют встречное направление вращения. Электродвигатели связаны с аккумуляторной батареей и с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством, мобильным пультом контроля и управления, системой видеонаблюдения и блоком приема и обработки данных спутниковой навигационной системы (RU №2518440, 2014 г.).
Недостатками известного беспилотного летательного аппарата многоцелевого назначения являются:
- громоздкость и неразборность конструкции беспилотного летательного аппарата, что в свою очередь не позволяет его удобно транспортировать и эксплуатировать;
- низкая надежность и жесткость конструкции, поскольку непосредственно к несущей пластине рамы крепятся штанги с движителями;
- отсутствие системы равномерного распределения нагрузки на несущую раму и незащищенность подвесной аппаратуры и винтов движителей от механических воздействий в случае неудачного приземления, опрокидывания аппарата или его столкновения с препятствием;
- большая масса беспилотного летательного аппарата и, как следствие, снижение продолжительности полета.
В основу изобретения поставлена задача усовершенствования конструкции переносного беспилотного летательного аппарата многоцелевого назначения для уменьшения громоздкости, обеспечения разборности конструкции беспилотного летательного аппарата, удобства транспортировки, повышения надежности и жесткости конструкции, обеспечения равномерного распределения нагрузки на несущую раму и защиты подвесной аппаратуры и винтов движителей от механических воздействий в случае неудачного приземления, опрокидывания аппарата или его столкновения с препятствием, снижения массы беспилотного летательного аппарата и увеличение продолжительности полета.
Поставленная задача решается тем, что в переносном беспилотном летательном аппарате многоцелевого назначения, включающем несущую раму с закрепленными на ней винтовыми движителями, аккумуляторную батарею, маршрутное вычислительное устройство с инерциальным измерительным устройством, подвесы для крепления полезной нагрузки и имеющем возможность управления с мобильного пульта, несущая рама аппарата выполнена из двух пластин, расположенных друг над другом, которые соединены посредством осей, на которых между пластинами установлены защелки для фиксации штанг в рабочем положении, двух симметричных шарнирных опор складывающихся шасси и расположенных между шарнирных опор четырех шарниров, в которых закреплены концы штанг, на противоположных сторонах которых закреплены винтовые движители со складывающимися лопастями, при этом к нижней пластине рамы через демпферы крепятся две несущие параллельные друг другу направляющие, концы которых снабжены полужесткими силиконовыми соединителями в виде втулок с двумя боковыми отводами, причем один отвод расположен под прямым углом к соседней направляющей, а другой под острым углом в направлении штанг, на которых перед движителями закреплены полужесткие силиконовые соединители, при этом все полужесткие соединители связаны между собой посредством ребер жесткости с образованием многоугольного пространственного пояса жесткости, связанного посредством штанг с несущей рамой, в каждый полужесткий силиконовый соединитель штанг дополнительно одними концами установлены и зафиксированы на корпусе движителя зажимами по два изогнутых защитных луча, каждый конец которого изогнут по отношению к другому концу под углом 135°, а между собой свободные концы каждой пары защитных лучей расположены под прямым углом и свободные концы лучей выполнены длиной не менее длины лопасти.
Поскольку несущая рама аппарата выполнена из двух пластин, расположенных друг над другом, которые соединены посредством осей, на которых между пластинами установлены защелки для фиксации штанг в рабочем положении, двух симметричных шарнирных опор складывающихся шасси и расположенных между шарнирных опор четырех шарниров, в которых закреплены концы штанг, на противоположных сторонах которых закреплены винтовые движители со складывающимися лопастями, при этом к нижней пластине рамы через демпферы крепятся две несущие параллельные друг другу направляющие, концы которых снабжены полужесткими силиконовыми соединителями в виде втулок с двумя боковыми отводами, причем один отвод расположен под прямым углом к соседней направляющей, а другой под острым углом в направлении штанг, на которых перед движителями закреплены полужесткие силиконовые соединители, при этом все полужесткие соединители связаны между собой посредством ребер жесткости с образованием многоугольного пространственного пояса жесткости, связанного посредством штанг с несущей рамой, в каждый полужесткий силиконовый соединитель штанг дополнительно одними концами установлены и зафиксированы на корпусе движителя зажимами по два изогнутых защитных луча, каждый конец которого изогнут по отношению к другому концу под углом 135°, а между собой свободные концы каждой пары защитных лучей расположены под прямым углом и свободные концы лучей выполнены длиной не менее длины лопасти, обеспечивается уменьшение громоздкости, разборность конструкции беспилотного летательного аппарата, удобство транспортировки, повышение надежности и жесткости конструкции, равномерность распределения нагрузки на несущую раму и защита подвесной аппаратуры и винтов движителей от механических воздействий в случае неудачного приземления, опрокидывания аппарата или его столкновения с препятствием, снижение массы беспилотного летательного аппарата и увеличение продолжительности полета.
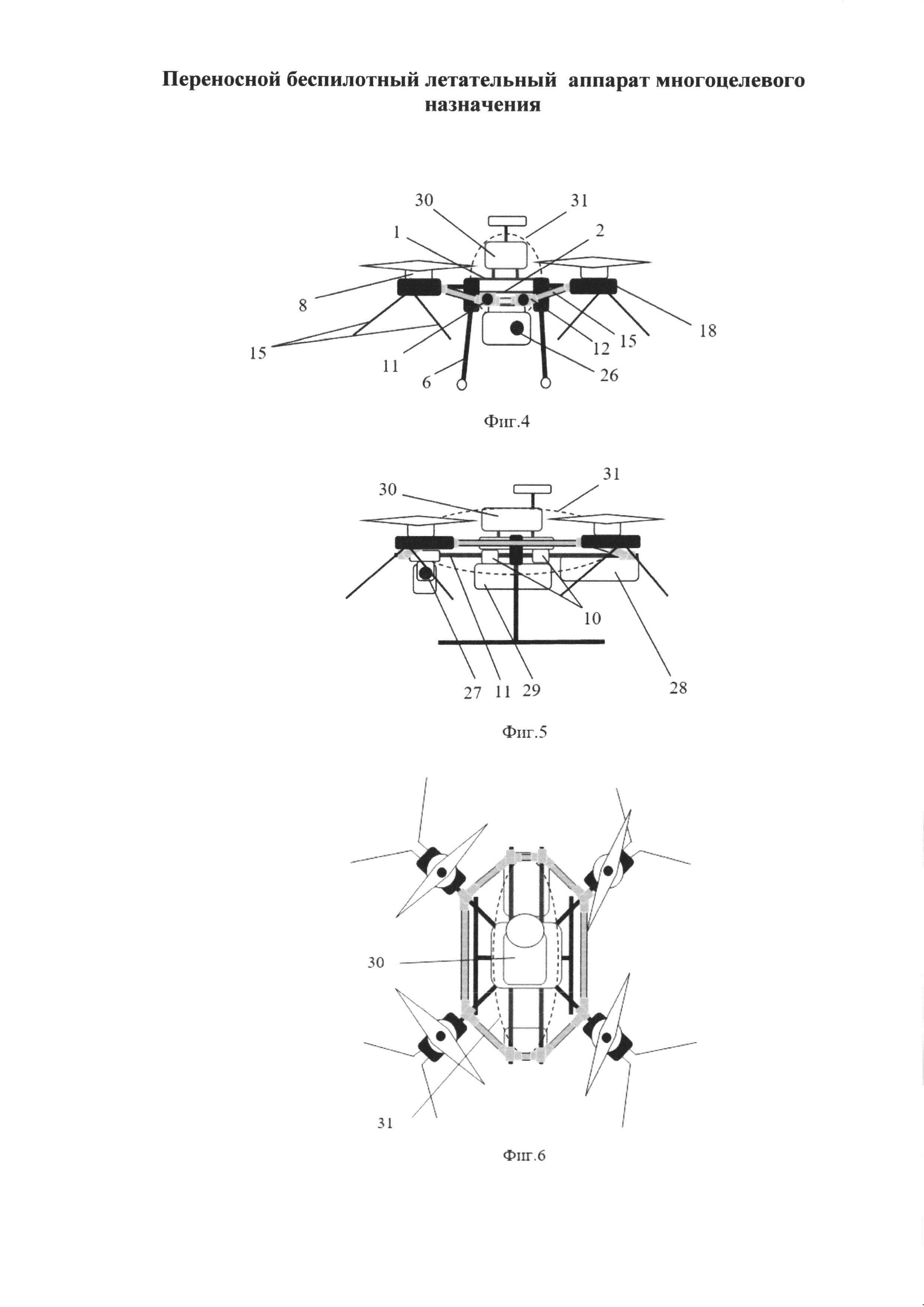
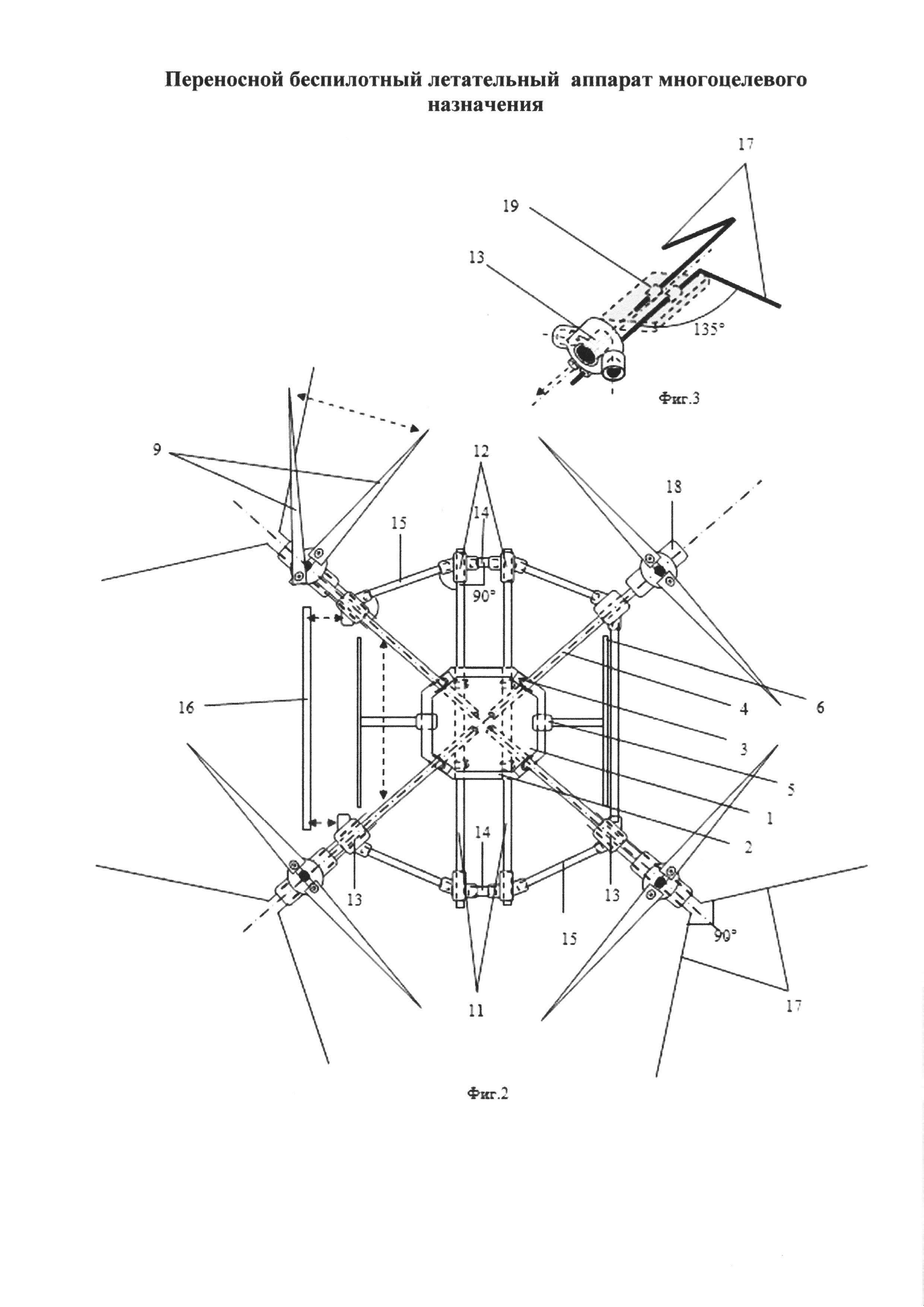
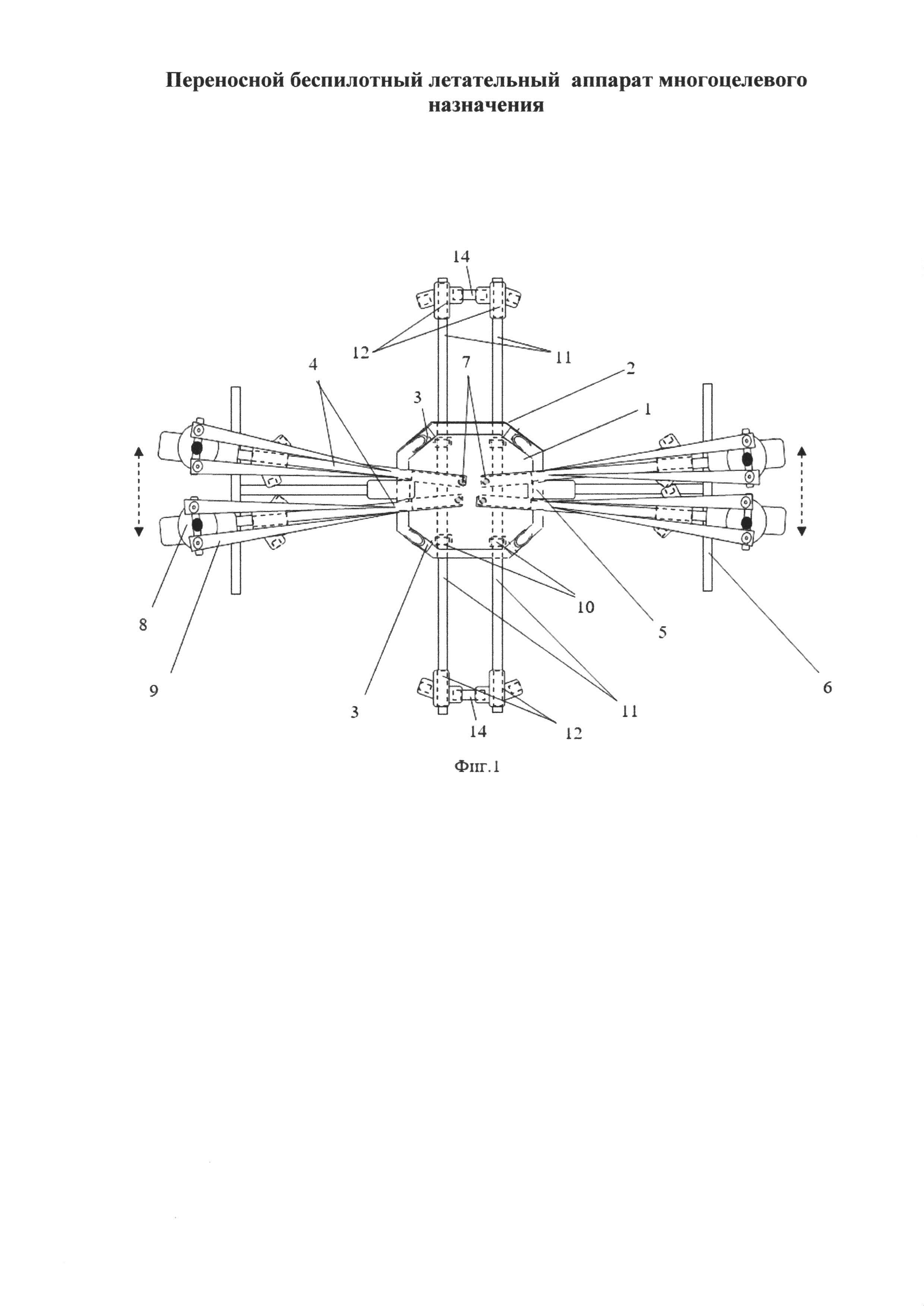
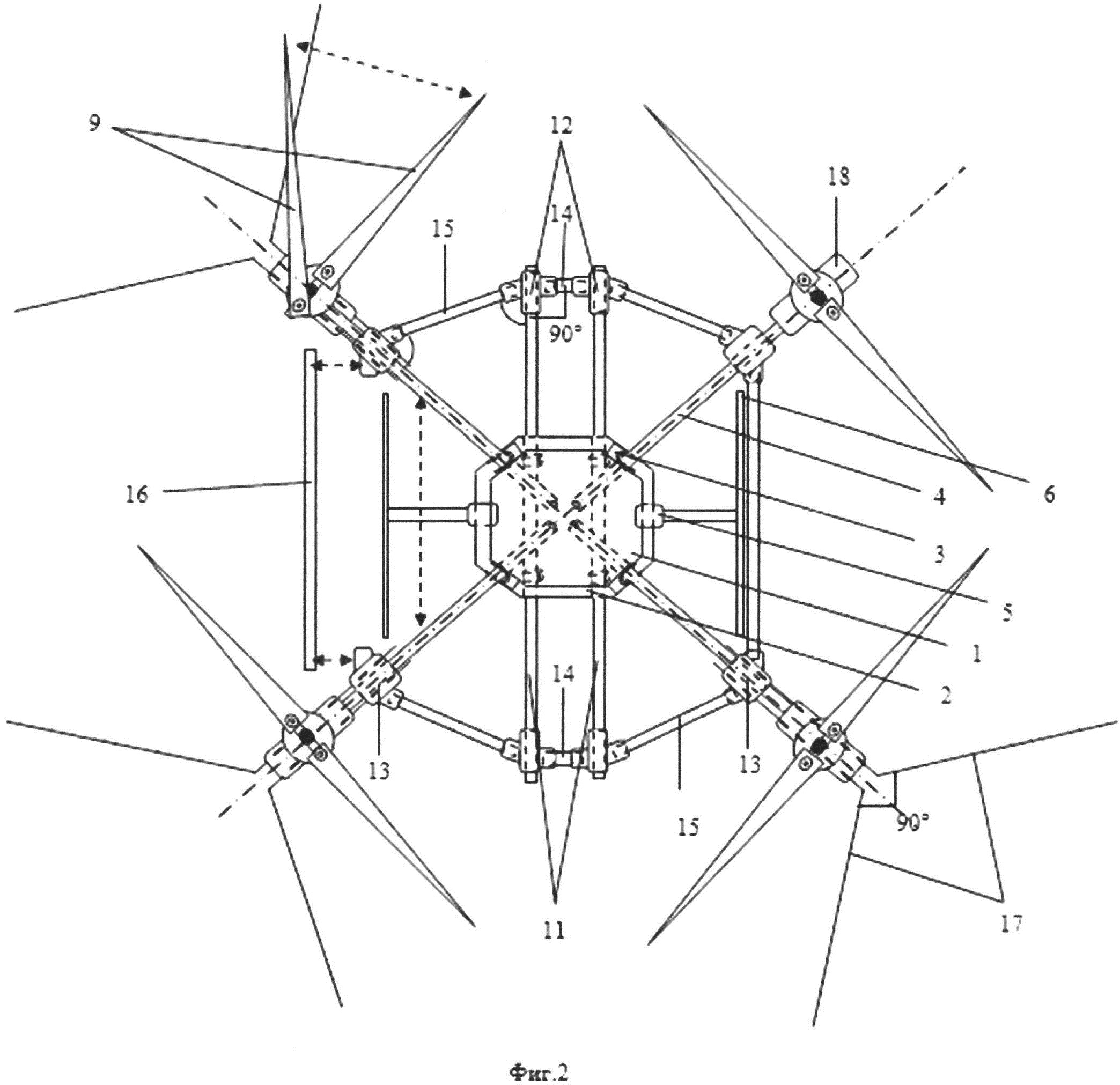
На фиг. 1 представлена конструктивная схема переносного беспилотного летательного аппарата многоцелевого назначения (в транспортном состоянии - вид сверху); на фиг. 2 - схема перевода из транспортного в рабочее состояние переносного беспилотного летательного аппарата многоцелевого назначения с расположением конструктивных элементов (вид сверху); на фиг. 3 - схема узла фиксации спаренных защитных лучей; на фиг. 4 - схема переносного беспилотного летательного аппарата многоцелевого назначения в рабочем состоянии - вид спереди; на фиг. 5 - схема переносного беспилотного летательного аппарата многоцелевого назначения в рабочем состоянии - вид сбоку фиг. 4; на фиг. 6 - схема переносного беспилотного летательного аппарата многоцелевого назначения в рабочем состоянии - вид сверху фиг. 4; на фиг. 7 - компоновка ранца для переноски с расположенным беспилотным летательным аппаратом многоцелевого назначения в транспортном состоянии.
Конструктивно беспилотный летательный аппарат состоит (фиг. 1) из несущей рамы, выполненной из двух пластин - верхней 1 и нижней 2, расположенных друг над другом, которые соединены между собой при помощи осей (условно не показаны), на которых установлены защелки 3 для фиксации штанг 4 в рабочем положении, двумя симметричными шарнирными опорами 5 складывающихся шасси 6 и четырех шарниров 7, в которых закреплены концы штанг 4, на противоположных сторонах которых закреплены винтовые движители 8 со складывающимися лопастями 9, при этом к нижней пластине 2 через демпфер 10 крепятся две несущие направляющие 11, концы которых снабжены полужесткими силиконовыми соединителями 12 в виде втулок (фиг. 2) с двумя боковыми отводами, причем один отвод расположен под прямым углом к соседней (параллельной направляющей), а другой под острым углом в направлении штанг, на которых перед движителями закреплены аналогичные полужесткие силиконовые соединители 13, в отводы которых вставляются ребра жесткости 14, 15, 16 (два ребра 14 между направляющими 11, четыре ребра 15 между штангами 4 и направляющими 11, два ребра 16 между штангами 4), образующие многоугольный пространственный пояс жесткости, прочно связанный через штанги 4 с несущей рамой. В каждый полужесткий силиконовый соединитель 13 штанг 4 дополнительно одними концами установлены и зафиксированы на корпусе движителя 18 зажимами 19 по два изогнутых защитных луча 17, каждый конец которого изогнут по отношению к другому концу под углом 135°, а между собой свободные концы каждой пары защитных лучей 17 расположены под прямым углом и свободные концы лучей 17 выполнены длиной не менее длины лопасти 9.
Для приведения беспилотного летательного аппарата из собранного транспортного состояния (фиг. 1) в рабочее состояние (фиг. 2) летательный аппарат 21 (фиг. 7) извлекается из ложемента ранца с уже (фиг. 5) подвешенной аккумуляторной батареей 29, фото- и видео- (инфракрасной) аппаратурой 26 на гиростабилизированной платформе 27, сменным блоком целевой нагрузки 28. Извлекается (фиг. 7) пульт управления 22 с монитором 23. Включается питание (фиг. 7) на летательном аппарате 21, пульте управления 22 и мониторе 23. Штанги (фиг. 2) 4 разводятся в стороны и фиксируются в защелках 3, складывающиеся шасси 6 из параллельного состояния относительно пластин 1 и 2 посредством пульта управления 22 и симметричных шарнирных опор 5 переводятся в рабочее положение 90° по отношению к пластинам, лопасти 9 (фиг. 3) просто расправляются, устанавливаются дополнительные ребра жесткости 14, 15, 16 в полужесткие силиконовые соединители 12, 13, которые зафиксированы на несущих направляющих 11 и на штангах 4, затем в полужесткие силиконовые соединители штанг 13 дополнительно крепятся направленные вниз спаренные защитные лучи 17 из стальной проволоки и фиксируются на корпусе движителя 18 относительно друг друга под прямым углом. Это обеспечивает гашение энергии удара при опрокидывании или неудачной посадке, а также частично выполняют защиту лопастей при столкновении беспилотного летательного аппарата с препятствиями. Проводится предполетный осмотр беспилотного летательный аппарата.
Портативность устройства достигается сборно-разборной конструкцией, приведением ее в транспортное положение (фиг. 1), для удобства транспортировки в «походном положении» в собранном состоянии вариант - (фиг. 7). В ранце 20 надежно закреплены в ложементе: летательный аппарат 21, пульт управления 22 с монитором 23, запасные аккумуляторные батареи 24, зарядное устройство 25. Габаритные размеры беспилотного летательного аппарата: длина, ширина, высота в разобранном состоянии 0,7×0,5×0,2 м.
Данная конструкция позволяет также быстро ее развернуть и подготовить беспилотный летательный аппарат к полету за минимальное время.
Штанги 4 и направляющие 11 выполнены из углеволоконных трубок разного диаметра, имеющих небольшой вес и достаточную прочность.
На несущих направляющих 11 (фиг. 4) появляется возможность одновременного размещения на них как фото- и видео- (инфракрасной) аппаратуры 26 на гиростабилизированной платформе (фиг. 5) 27, так и сменного блока 28 целевой нагрузки для ведения химической и радиационной разведки, аккумуляторной батареи 29.
Воздушные лопасти 9 по размерам для данной конструкции оптимальны - 15,5 дюймов для меньшего энергопотребления, так как позволяют создавать большую тягу при малых оборотах, не создавая перегрева движителей. Детали смонтированы так, чтобы обеспечить стабильность полета и неподвижное положение в режиме «зависания» в воздухе, с сосредоточением массы аппарата в центре (в частности, аккумулятор 29 расположен по центру).
Маршрутное вычислительное устройство с инерциальным измерительным устройством 30 расположены по центру и защищены защитной крышкой 31.
Для удержания винтовых движителей 8 в одной плоскости, исключения вибрации на раме реализовано следующее решение (Фиг. 2) - устанавливаются дополнительные ребра жесткости 14, 15, 16 в полужесткие силиконовые соединители 12, 13, которые зафиксированы на несущих направляющих 11 и на штангах 4, их соединение образует многоугольный пространственный пояс жесткости, который позволит повысить надежность конструкции и равномерно распределить энергию удара в случае падения, сохранить штанги 4 с движителями 8 и центральную часть с аппаратурой управления.
Габаритные размеры беспилотного летательного аппарата: длина, ширина, высота с учетом вращающихся плоскостей в рабочем состоянии приблизительно будет составлять 0,8×0,8×0,3 м.
Беспилотный летательный аппарат управляется при помощи пульта управления как радиоуправляемая модель. Дальность устойчивого ручного управления составляет до 1-1,5 км. Дальность контролирования беспилотного летательного аппарата может быть увеличена при передаче с него видеосигнала в режиме реального времени, и при наличии глобального позиционирования есть возможность почти не следить за аппаратом. Беспилотный летательный аппарат выполнен с возможностью самостоятельного полета в заданную точку кратчайшим маршрутом.
Грузоподъемность беспилотного летательного аппарата составляет до 1 кг, что в свою очередь позволяет устанавливать на него различные блоки многоцелевого назначения (для ведения химической и радиационной разведки). Передача информации о замерах осуществляется оператором по радиоканалу в режиме реального времени и сохраняется в запоминающее устройство.
При емкости аккумулятора 10 Ач время полета составляет 30 минут. Посредством варьирования высоты подъема возможно решать задачи ведения аэрофото-видеосъемки при подъеме до нескольких сотен метров, при решении задач применения газосигнализаторов для ведения химической разведки - высота полета беспилотного летательного аппарата должна быть минимально возможной, что опять же обеспечивается только беспилотным летательным аппаратом вертолетного типа, «зависание» в определенной точке также крайне важно при проведении радиационной, химической разведки. При потере связи с мобильным пультом контроля и управления беспилотный летательный аппарат переходит в автоматический режим и способен выполнить предустановленные команды, после чего долететь до пункта назначения, руководствуясь данными системы глобального позиционирования.
Предложенное техническое решение использует широкий спектр целевых нагрузок для целей ведения разведки, в том числе для выявления и оценки параметров радиационной и химической обстановки в заданном районе с привязкой к местности.
Таким образом, предлагаемый переносной беспилотный летательный аппарат многоцелевого назначения по сравнению с прототипом и другими техническими решениями аналогичного назначения позволит повысить надежность конструкции, достичь эффекта оперативности - сокращением времени развертывания беспилотного летательного аппарата, достичь расширения возможностей проведения работ по мониторингу обстановки и действий в зараженной зоне и выполнять задачи по воздушному фотографическому, телевизионному, тепловизионному контролю (в дневных и ночных условиях), комплексно одномоментно используя целевые нагрузки радиационной и химической разведки.
Данное конструктивное решение на основе вышеизложенного обеспечивает следующие преимущества:
- снижение массы за счет использования деталей рамы из углеволокна;
- удобство транспортировки за счет сборно-разборной конструкции;
- достигается эффект оперативности путем уменьшения времени сборки беспилотного летательного аппарата и готовности к работе;
- повышение долговечности путем усиления раскладывающихся штанг;
- создание многоугольного пространственного пояса жесткости с фиксацией в рабочем положении, позволяющего повысить надежность конструкции и равномерно распределить энергию удара в случае падения, сохранив штанги и центральную часть с аппаратурой управления;
- спаренные защитные лучи, устанавливаемые в полужесткие силиконовые соединители штанг, выполняют защиту навесной аппаратуры и обеспечивают первичное гашение энергии удара при опрокидывании или неудачной посадке беспилотного летательного аппарата, также обеспечивают защиту лопастей от столкновений с препятствиями;
- за счет удлиненных несущих направляющих стало возможным одномоментное размещение на них как фото- и видео- (инфракрасной) аппаратуры, так и сменных блоков целевой нагрузки в зависимости от выполняемых задач.
Переносной беспилотный летательный аппарат многоцелевого назначения, включающий несущую раму с закрепленными на ней винтовыми движителями, аккумуляторную батарею, маршрутное вычислительное устройство с инерциальным измерительным устройством, подвесы для крепления полезной нагрузки и имеющий возможность управления с мобильного пульта, отличающийся тем, что несущая рама аппарата выполнена из двух пластин, расположенных друг над другом, которые соединены посредством осей, на которых между пластинами установлены защелки для фиксации штанг в рабочем положении, двух симметричных шарнирных опор складывающихся шасси и расположенных между шарнирных опор четырех шарниров, в которых закреплены концы штанг, на противоположных сторонах которых закреплены винтовые движители со складывающимися лопастями, при этом к нижней пластине рамы через демпферы крепятся две несущие параллельные друг другу направляющие, концы которых снабжены полужесткими силиконовыми соединителями в виде втулок с двумя боковыми отводами, причем один отвод расположен под прямым углом к соседней направляющей, а другой под острым углом в направлении штанг, на которых перед движителями закреплены полужесткие силиконовые соединители, при этом все полужесткие соединители связаны между собой посредством ребер жесткости с образованием многоугольного пространственного пояса жесткости, связанного посредством штанг с несущей рамой, в каждый полужесткий силиконовый соединитель штанг дополнительно одними концами установлены и зафиксированы на корпусе движителя зажимами по два изогнутых защитных луча, каждый конец которого изогнут по отношению к другому концу под углом 135°, а между собой свободные концы каждой пары защитных лучей расположены под прямым углом и свободные концы лучей выполнены длиной не менее длины лопасти.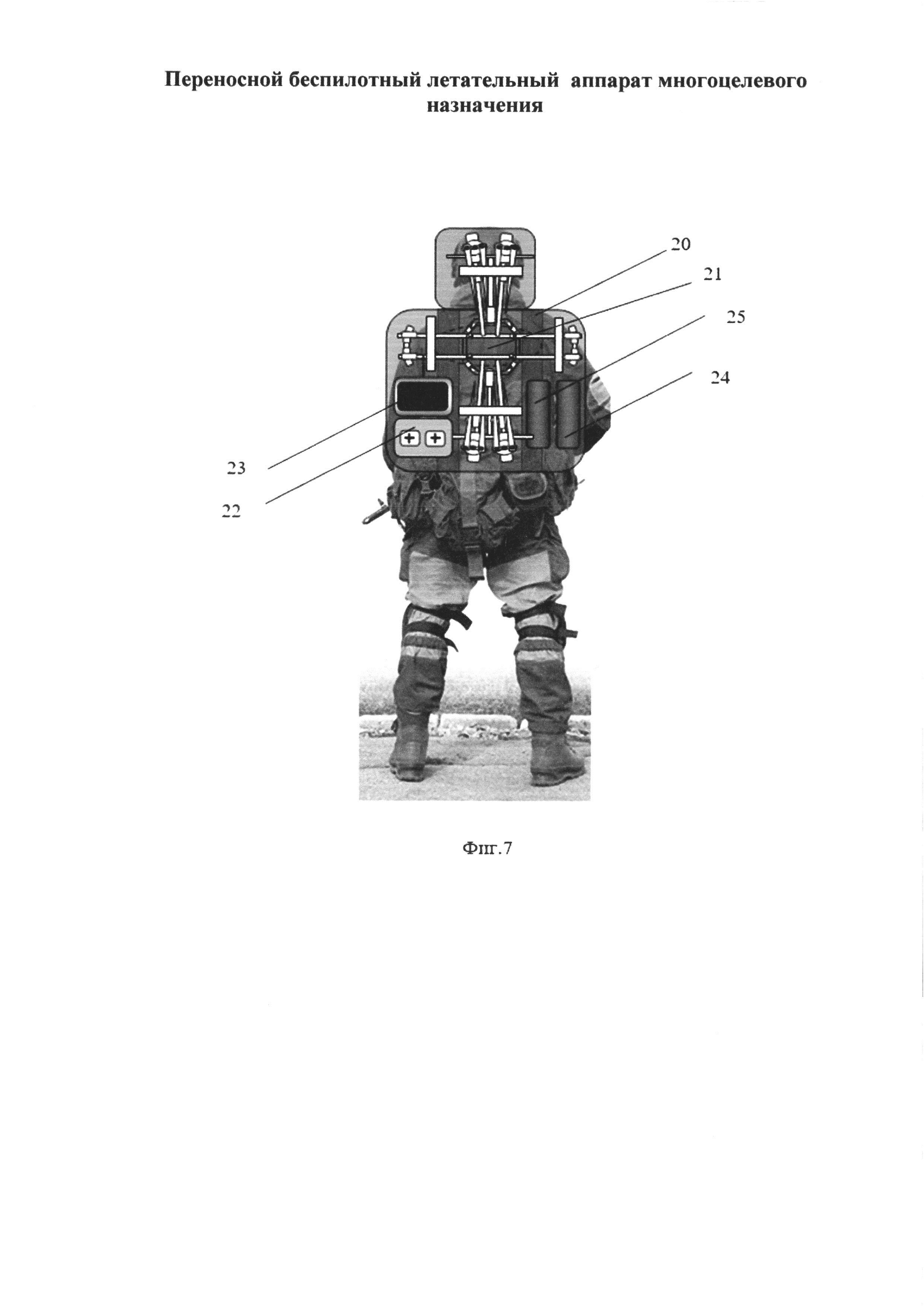
Устройство симметрирования напряжения сети при обрыве двух любых фаз
Устройство диагностики силового масляного трансформатора
Устройство мониторинга технического состояния двигателя роботизированного комплекса
Устройство диагностики технического состояния электродвигателя подвижного роботизированного комплекса
Устройство для контроля целостности поля навигационных космических аппаратов
Установка для определения чувствительности к тепловому импульсу и периода индукции взрывчатых веществ
Устройство для моделирования комбинаций разнотипных подвижных объектов
Передатчик повышенной структурной и энергетической скрытности
Устройство для передачи многофазной системы напряжений по оптоволоконной линии
Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения
Устройство диагностики силового масляного трансформатора
Устройство мониторинга технического состояния двигателя роботизированного комплекса
Устройство диагностики технического состояния электродвигателя подвижного роботизированного комплекса
Устройство для контроля целостности поля навигационных космических аппаратов
Установка для определения чувствительности к тепловому импульсу и периода индукции взрывчатых веществ
Устройство для моделирования комбинаций разнотипных подвижных объектов
Передатчик повышенной структурной и энергетической скрытности
Устройство контроля и управления техническим состоянием аккумуляторных батарей
Механизм параллельной структуры с шестью степенями свободы

